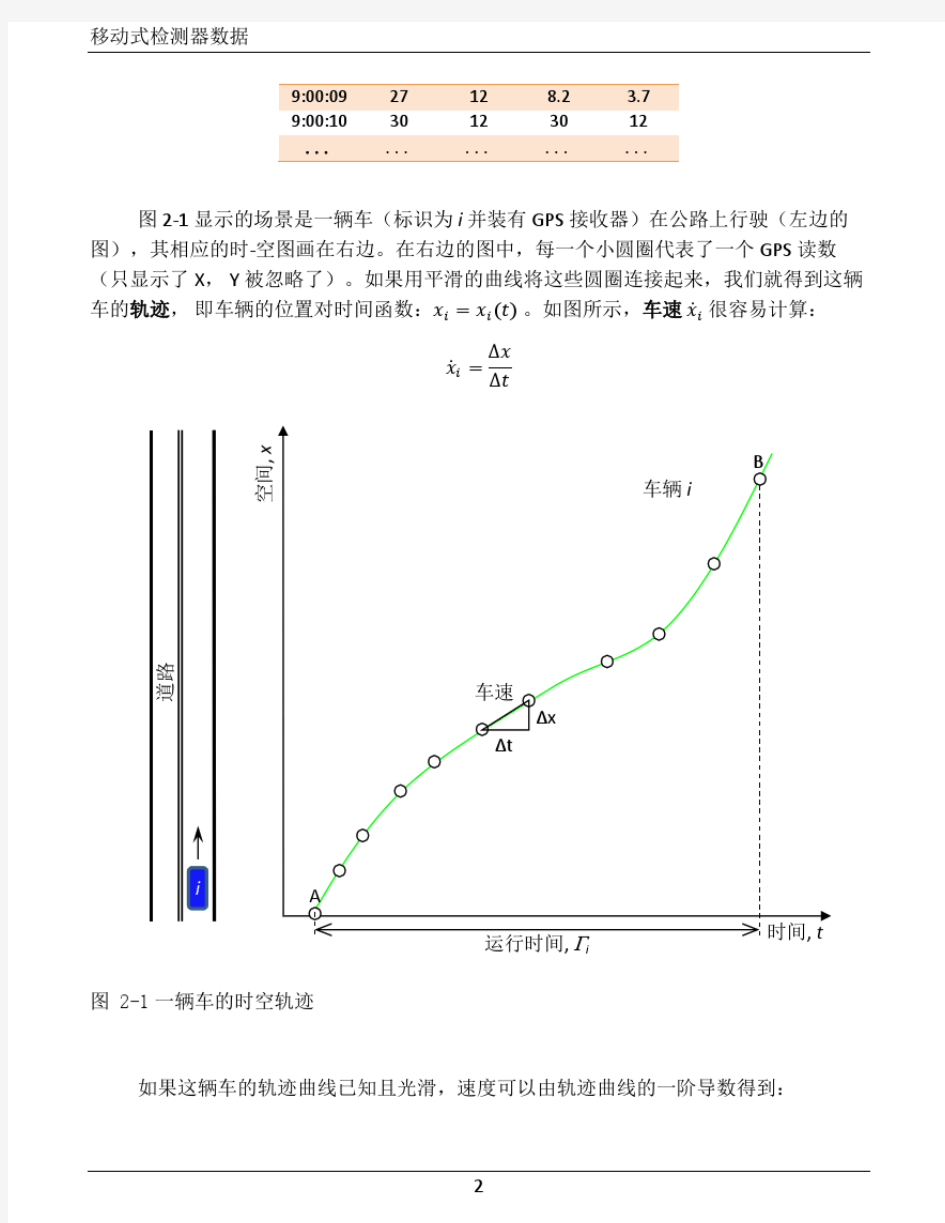
第二章 交通流特性 第一节 交通调查 交通调查:在道路系统的选定点或选定路段,为了收集有关车辆(或行人)运行情况的数据而进行的调查分析工作。 意义:交通调查对搞好交通规划、道路设施建设和交通管理等都是十分重要的。 调查方法: (1)定点调查; (2)小距离调查(距离小于10m ); (3)沿路段长度调查(路段长度至少为500m ); (4)浮动观测车调查; (5)ITS 区域调查。 图2—1中,纵坐标表示车辆在行驶方向上距离始发点(任意选定)的长度,横坐标表示时间。图中的斜线代表车辆的运行轨迹,斜率为车速,直线相交表示超车。 穿过车辆运行轨迹的水平直线代表定点调查; 两条非常接近的水平平行直线表示小距离调查; 一条竖直直线表示沿路段长度调查(瞬时状态,例如空拍图片); 车辆的轨迹之一就可代表浮动车调查; ITS 区域调查类似于在不同时间、不同地点进行大量的浮动车调查。 图2—1 几种调查方法的时间—距离图示 时间(s ) 距离(m ) 高速公路车道
一、定点调查 定点调查包括人工调查和机械调查两种。 人工调查方法即选定一观测点,用秒表记录经过该点的车辆数。 机械调查方法常用的有自动计数器调查、雷达调查、摄像机调查等。 自动计数器调查法使用的仪器有电感式、环形线圈式、超声波式等检测仪器,它几乎适用于各种交通条件,特别是需要长期连续性调查的路段。 雷达调查法适用于车速高、交通量密度不大的情况。 摄像机调查法一般将摄像机安装在观测点附近的高空处,将镜头对准观测点,每隔一定的时间,如15s、30s、45s或60s,自动拍照一次,根据自动拍摄的照片上车辆位置的变化,清点出不同流向的交通量。这种方法可以获得较完全的交通资料,如流量、流向、自行车流及行人流和行驶速度、车头时距及延误等。 除这些方法以外,还有航空摄影调查法、光电管调查法等。 定点调查能直接得到流量、速度和车头时距的有关数据,但是无法测得密度。 二、小距离调查 这种调查使用成对的检测器(相隔5m或6m)来获得流量、速度和车头时距等数据。 目前常用的点式检测器,如感应线圈和微波束。调查地点车速时,将前后相隔一定距离(如5m)的检测器埋设地下,车辆经过两个检测器时发出信号并传送给记录仪,记录仪记录车辆通过两个检测器所使用的时间,那么用相隔的距离除以时间就得到地点车速。 这种调查方法还能得到占有率,占有率是指检测区域内车辆通过检测器的时间占观测总时间的百分比。由于占有率与检测区域的大小、检测器的性质和结构有关,因此同样的交通状态下,不同位置测得的占有率可能不同。 小距离调查同样无法测得密度,但可获得流量、速度、车头时距和占有率等数据。 三、沿路段长度调查 沿路段长度调查主要是指摄像调查法,适用于500m以上的较长路段。 摄像调查法首先对观测路段进行连续照像,然后在所拍摄的照片上直接点数车辆数,因此这种方法是调查密度的最准确途径。但是,由于拍摄
第三章交通流的基本特性 第一节概述 道路上的行人或运行的车辆构成行人流或车流,人流和车流统称为交通流。一般交通工程学研究中,有特指时的交通流是针对机动车交通流而言的。 交通流的定性和定量特征,称为交通流特性。观测和研究发现,由于在交通过程中人、车、路、环境的相互联系和影响作用,道路交通流具有以下三个基本特性。 1.两重性 对道路上运行车辆的控制既取决于驾驶员,又取决于道路及交通控制系统。一方面,驾驶员为避免与其他车辆发生冲突,必然受到道路条件及交通控制系统的制约;另一方面,驾驶员又可以在一定的时空条件下,依据自己的意志自由地改变车速和与其他车辆的相对位置。 2.局限性 由于机动车和道路的物理尺寸所限,车辆运行中相互之间可能会相互妨碍。仅由于道路通行能力的限制和车辆间的相互制约,就有可能引起交通拥挤;另外,车速也是有限的,并因车辆和时空条件而异。 3.时空性 由于车速是随机变化的,机动车在时间上和空间上的状态都是不相同的,因此,交通流既是现有时间变化规律,又有其空间变化规律。道路交通流的以上三个特性进一步说明:道路交通是一个复杂的动态系统。由这三个特性出发,将道路上的交通流用交通量、速度、密度三个基本参数加以描述。观测、整理和研究这些参数的变化规律以及它们之问的相互关系,可以为分析道路上的运营状况、交通规则、路网布设、线形设计、运输调度与组织、运力投放与调控以及为现有道路交通综合治理提供起决定作用的论证数据。
第二节交通量的基本特性 交通量是指单位时间内,通过道路某一地点或某一断面的实际交通参与 者(含车辆、行人、自行车等)的数量,又称交通流量或称流量。如果不加说明时,通常是指单位时间内通过道路某一地点或某一断面往来两个方向的车辆数,亦称为车流量。 在交通量观测和统计分析及实际应用中,常见的交通量有以下几种: 1.平均交通量 交通量不是一个静止的量,它是随时间变化的,在表达方式上通常取某一时段内的平均值作为该时段的代表交通量。如年平均日交通量就是将一年内的交通量总数除以当年的总天数所得出的平均值。常用的有平均日交通量,还有月平均日交通量,周平均日交通量以及任意期间(依特定分析目的而定)的平均日交通量等。以上平均交通量可以概括成如下的表达式 平均日交通量 (ADT)=1/n{∑Q (3—1) 式中 Q i——计算期内各单位时间的交通量; n——计算期内的单位时间总数。 如果计算年平均日交通量(A A D T)时,n为365或366,则 年平均日交通量 (AADT)= (3—2) 由此类推:
《交通工程学 第四章 交通流理论》习题解答 4-1 在交通流模型中,假定流速 V 与密度 k 之间的关系式为 V = a (1 - bk )2 ,试依据两个边界条件,确定系数 a 、b 的值,并导出速度与流量以及流量与密度的关系式。 解答:当V = 0时,j K K =, ∴ 1j b k = ; 当K =0时,f V V =,∴ f a V =; 把a 和b 代入到V = a (1 - bk )2 ∴ 2 1f j K V V K ??=- ? ? ? ? , 又 Q KV = 流量与速度的关系1j Q K V ?= ? 流量与密度的关系 2 1f j K Q V K K ??=- ? ??? 4-2 已知某公路上中畅行速度V f = 82 km/h ,阻塞密度K j = 105 辆/km ,速度与密度用线性关系模型,求: (1)在该路段上期望得到的最大流量; (2)此时所对应的车速是多少 解答:(1)V —K 线性关系,V f = 82km/h ,K j = 105辆/km ∴ V m = V f /2= 41km/h ,K m = K j /2= 辆/km , ∴ Q m = V m K m = 辆/h (2)V m = 41km/h 解答:35.9ln V k = 拥塞密度K j 为V = 0时的密度, ∴ 180 ln 0j K =
∴ K j = 180辆/km 4-5 某交通流属泊松分布,已知交通量为1200辆/h ,求: (1)车头时距 t ≥ 5s 的概率; (2)车头时距 t > 5s 所出现的次数; (3)车头时距 t > 5s 车头间隔的平均值。 解答:车辆到达符合泊松分布,则车头时距符合负指数分布,Q = 1200辆/h (1)153600 3 (5)0.189Q t t t P h e e e λ- ?-?-≥==== (2)n = (5)t P h Q ≥? = 226辆/h (3)55158s t t e tdt e dt λλλλλ +∞-+∞-??=+=? 4-6 已知某公路 q =720辆/h ,试求某断面2s 时间段内完全没有车辆通过的概率及其 出现次数。 解答:(1)q = 720辆/h ,1 /s 36005 q λ= =辆,t = 2s 25 (2)0.67t t P h e e λ- -≥=== n = ×720 = 483辆/h 4-7 有优先通行权的主干道车流量N =360辆/ h ,车辆到达服从泊松分布,主要道路允许次要道路穿越的最小车头时距=10s ,求 (1) 每小时有多少个可穿空档 (2) 若次要道路饱和车流的平均车头时距为t 0=5s ,则该路口次要道路车流穿越主要道路车流的最大车流为多少 解答: 有多少个个空挡?其中又有多少个空挡可以穿越? (1) 如果到达车辆数服从泊松分布,那么,车头时距服从负指数分布。 根据车头时距不低于t 的概率公式,t e t h p λ-=≥)(,可以计算车头时距不低于10s 的 概率是 3679.0)10(3600 10360==≥÷?-e s h p 主要道路在1小时内有360辆车通过,则每小时内有360个车头时距,而在360个车头时距中,不低于可穿越最小车头时距的个数是(总量×发生概率) 360×=132(个)
第一章绪论 交通流理论是研究交通流随时间和空间变化规律的模型和方法体系。多年来,交通流理论在交通运输工程的许多领域,如交通规划、交通控制、道路与交通工程设施设计等都被广泛地应用着,应该说交通流理论是这些研究领域的基础理论。近些年来,尤其是随着智能运输系统的蓬勃发展,交通流理论所涉及的范围和内容在不断地发展和变化,如控制理论、人工智能等新兴科学的思想、方法和理论已经用于解决交通运输研究中遇到的复杂问题,又如随着计算机技术的发展,模拟技术和方法越来越多地被用来描述和分析交通运输工程的某些过程或现象。 第一节交通流理论的沿革 交通流理论的发展与道路交通运输业的发展和科学技术的发展密切相关,在交通运输业发展的不同时期和科学技术发展的不同阶段,对交通流理论的需求和研究能力都不同,因此产生了交通流理论的不同发展阶段。 按照时间顺序,交通流理论可以划分为三个阶段。 创始阶段此阶段被界定为20世纪30年代至第二次世界大战结束。在此期间,由于发达国家汽车工业和道路建设的发展,需要摸索道路交通的基本规律,以便对其进行科学管理,道路交通产生了对交通流理论的初步需求,需要有人对其进行研究。此阶段的代表人物为格林希尔治(Bruce D.Greenshields), 其代表性成果是用概率论和数理统计的方法建立数学模型,用以描述交通流量和速度的关系,并对交叉口交通状态进行调查。正是由于其奠基性工作,人们常常称格林希尔治为交通流理论的鼻祖。 快速发展阶段此阶段被界定为第二次世界大战结束至20世纪50年代末。在这一阶段,发达国家的公路和城市道路里程迅猛增长,汽车拥有量大幅度上升,此时交通规划和交通控制已经提到日程。如何科学地进行交通规划和控制,需要交通流理论提供支持。此阶段的特点是交通流理论获得高速发展,并产生了多个分支和学术上的多个代表人物。学术分支包括:车辆跟驰(car following)理论、基于流体力学的交通波理论(traffic wave theory)和排队理论(queuing theory)等。此时期造就的本领域的代表性人物有:沃德洛尔(Wardrop)、鲁契尔(Reuschel)、派普斯(Pipes)、莱特希尔(Lighthill)、惠特汉(Whitham)、纽厄尔(Newel)、韦伯斯特(Webster)、伊迪(Edie)、佛特(Foote)、张德勒(Chandler)、赫尔曼(Herman)等。 稳步发展阶段此阶段被界定为1959年以后。此阶段由于汽车的普及,交通已经成为世界各国大中城市越来越严重的问题,需要发展交通流理论来加以解决。正是这种需求,使交通流理论得到了稳步发展。1959年举行了第一次国际研讨会(The First International Symposium on the Theory of Traffic Flow),并确定本次会议为三年一次的系列会议(Series of Triennial Symposia on the Theory of Traffic Flow and Transportation)的首次会议。除了这一系列会议以外,近些年来在世界各国又举行了许多交通运输领域的专题学术年会,这些年会都涉及到了交通流理论。 按照研究手段和方法,交通流理论可划分为两类。 传统交通流理论所谓的传统交通流理论是指以数理统计和微积分等传统数学和物理方法为基础的交通流理论,其明显特点是交通流模型的限制条件比较苛刻,模型推导过程比较严谨,模型的物理意义明确,如交通流分布的统计特性模型、车辆跟驰模型、交
第二节交通流理论 一、机动车交通 机动车交通是城市道路交通的主体。国外城市中的机动车大多是小汽车,车种较为单一,在一定的路段上车速基本相同,交通流相对比较简单。我国城市的机动车车种复杂,车速、性能差异较大,交通流比国外城市要复杂得多。 1.机动车流速度、流量和密度关系 (1)基本关系式 如果车流中所有车辆均以相同的车速通过某一段路程,则有下列关系: 式中:K为交通密度(辆/公里);Q为交通量 (辆/小时);V为车速(公里/小时)。 公式也经常写作: (2)车速与密度的关系 Vf为自由车速,Kj为当车速为零时的阻塞密度。 由上式及图可知,当密度逐渐增大则车速逐渐减小,当达到阻塞密度Kj时,车速为零,交通停顿。 (3)交通量与密度的关系 Ko称为最佳密度。由图可知,在Ko之前,交通量随密度的增加而增加,而在Ko之后,交通量将随密度的增加而减少。 (4)交通量与车速的关系
Vo称为最佳车速。由图可知在Vo之前,交通量随车速的增加而增加,而在Vo之后,交通量将随车速的增加而减少。 综上所述,将Q-K, Q-V及V-K关系图作于同一平面上,如上图,全面分析可知: (1)当密度很小时,交通量亦小,而车速很高(接近自由车速)。 (2)随着密度逐渐增加,交通量亦逐渐增加,而车速逐渐降低。当车速降至Vo时,交通量达到最大此时的车速称为临界车速,密度Ko称为最佳密度。 (3)当密度继续增大(超过Ko),交通开始拥挤,交通量和车速都降低。当密度达到最大(即阻塞密度凡)时,交通量与车速都降至为零,此时的交通状况为车辆首尾相接,堵塞于道路上。 (4)最大流量Qmax、临界车速Vo和最佳密度Ko是划分交通是否拥挤的特征值。当Q>Qmax,K>Ko,V<Vo时交通属于拥挤;当Q≤Qmax,K≤Ko,V≥Vo时,交通属于畅通。 由上述三个参数间的量值关系可知,速度和容量 (密度)不可兼得。因此,为保证高等道路(快速路、主干路)的速度,应对其密度加以限制 (如限制出入口、封闭横向路口等)。
交通流理论是运用数学、物理学和力学的原理描述交通流特性的一门边缘学科,是研究交通流随时间和空间变化规律的模型和方法体系,其目的是为了阐述交通现象形成的原理。 目前,对交通流理论的定义不尽相同,但归纳各种定义的主要思想,可以给交通流理论这样一个定义:交通流理论是研究在一定环境下交通流随时间和空间变化规律的模型和方法体系。根据上述定义,交通流理论设计的范围非常广泛,其研究内容很难一言以蔽之。参考各种文献资料后,将交通流理论的研究内容分为以下12部分: (1)交通流特性 主要介绍交通流的几个参数的概念和基本公式及交通调查的几种常用方法和特点。重点研究交通流参数经常用到的两类统计分布,即:离散型分布和连续型分布。 (2)交通流模型 交通流模型主要指速度—流量,速度—密度,流量—密度模型。交通流模型能实现交通流变量之间的转换,即能实现控制变量与交通性能指标之间的转换,从而在交通管理中可用于控制某个变量以使交通性能达到最优的的目的。 (3)驾驶人交通特性 在此驾驶人交通特性主要是指驾驶人对交通流的影响。包括人—车—路系统中驾驶人的驾驶任务,驾驶人的离散交通特性及根据闭环控制原理,研究驾驶传递函数及其应用,驾驶人交通特性在交通流中的应用,驾驶人交通特特性在交通流中的作用,包括坡道加速公式,可叉车间隙和合流,停车视距和交叉口视距以及速度错觉,信息干扰,实时信息等内容。 (4)车辆跟驰理论 交通流车辆跟驰理论是应用动力学方法,将交通流处理为分散的粒子组成,从围观角度探究在无法超车的单一车道上车辆列队行驶时,后车跟随前车的行驶状态,并用数学模式表达而加以分析阐明的一种理论。 (5)排队理论及应用 (6)连续交通流模型 (7)宏观交通流模型 (8)交通影响模型 (9)无信号交叉口理论 (10)信号交叉口理论 (11)交通系统仿真 (12)交通流理论的应用 城市道路信号交叉口作为城市道路网络中通行能力和交通安全的瓶颈,在道路衔接中起着举足轻重的作用,其通行能力的大小很大程度上决定或制约着整个城市路网的通行能力,影响着城市交通网络的运输能力。平面交叉口处反复地分流、合流、交叉,使其交通状况尤其复杂。 日常的交通拥堵大部分都是由于交叉口的通行能力不足造成的,因此信号交叉口成为路网规划、建设、改造和交通治理的重点。提高交叉口的通行能力,减少交叉口延误是城市道路交通追求的目标,也是改善城市道路整体状况的最有效的方法。 我国大多数城市道路信号交叉口采用多相位信号控制,基于我国城市信号交
■货车开往码头卸货,上午8:00-8:30的到达率为6veh/min,其后为2veh/min。 码头上午8:15开放,平均卸货和驶离速度为5veh/min。 ①绘出从8:00到排队消散时段的累计车辆数-时间曲线,确定码头开放后货车排队消散的时刻。 ②计算最大排队长度(排队中货车数量)。 ③计算到达码头货车的最长等待时间。 ④计算从8:00到排队消散时段的货车总延误和平均延误。 【提示】排队分析方法 ■一段单车道公路交通流规律符合Greenshields模型。测得自由流车速为80km/h,阻塞密度为75veh/km。 ①计算该路段通行能力以及对应的最佳速度和最佳密度。绘出流量-速度关系曲线,标出自由流速度、最佳速度和通行能力。 ②正常情况下交通流流率为1200veh/h,速度为75km/h。一辆速度为35km/h的卡车驶入该道路,行驶3.5km后又驶出。其后跟驶车辆被迫降低速度行驶,从而形成排队。如果车队的密度为40veh/km,流率为1400veh/h。确定货车驶出该路段时的排队长度。 ③确定货车驶出后排队的消散时间(假设道路下游没有交通阻塞)。【提示】交通流模型,连续流理论(冲击波分析方法) Dec2009-98-Civ-A6 ■观测到某交叉口进口的到达流量为675veh/h。信号周期为80s,绿灯时间为40s,红灯时间为40s(忽略黄灯时间)。假设红灯时间
排队车辆在绿灯时间以1800veh/h的饱和流率通过停止线。忽略驾驶员反应时间和车辆加速时间。 ①绘出一个信号周期的累计车辆数-时间曲线,确定绿灯启亮后排队消散的时刻。 ②计算一个周期的最大排队长度(排队中车辆数)。 ③计算一个信号周期的车辆总延误和平均延误。 【提示】排队分析方法 ■某单车道道路上的交通流正常情况下速度为30km/h,密度为20veh/km。该道路的通行能力为1000veh/h,自由流车速为37.5km/h。一天一辆车突然发动机 熄火停在路上,跟驶车辆被迫停在其后,6min后,该车辆重新启动。试应用Greenshields模型和冲击波分析方法确定: ①阻塞密度和最佳密度(达到通行能力时的密度)。 ②熄火停止车辆重新启动时后面的排队长度(车辆数)。 ③排队消散时刻(假设道路下游没有交通阻塞)。 【提示】交通流模型,连续流理论(冲击波分析方法) May2009-98-Civ-A6 ■公路上连续流的速度与密度呈反比关系,假设其关系为线性函数(速度单位为km/h,密度单位为veh/km): = 90- k
第六章宏观交通流模型 在城市快速发展而使交通变得拥挤的时候,城区的可达性便成为评价城市生活质量的重要方面,而交通拥挤确实已经成为当今各大城市的难题。为解决这一问题,人们采用了各种工程和技术手段,小到路口渠化、信号配时,大到道路网规划、智能运输系统,应该说各项技术均已经达到了有效、适用的地步。最近30年来,人们对应用这些技术形成的交通设施的效果进行了很多研究,并形成了对各单项设施评价的理论和方法,如干道通行能力和效果的评价,交叉口控制效果的评价等。但是如何对一个道路网络的交通效果进行评价更是人们所关心的问题,尤其是ITS快速发展的今天,有一个基于路网的交通流优化和评价模型体系,就显得更为重要了。 本章从宏观的角度介绍一些流量、速度和密集度的量测和推算方法,从而提供网络交通效果评价的基本理论和基本方法。这些方法可用于:1)同一城市不同时期的交通效果对比分析;2)不同城市同一时期的交通效果对比分析;3)路网交通设施设计评价。 第一节以CBD为中心的交通特性 这一节中重点研究不同位置的交通状况与所处城区地理位置之间的关系。 图6—1 交通强度与距市中心距离的关系 一、交通强度 交通强度是指单位面积上单位时间内通过的所有车辆(折合成标准车辆)的行驶距离总和。一般认为CBD(the central business district,商业中心区)是一个城市交通最为敏感的地区,交通强度与距CBD的距离有关。于是,研究者建立了多种以距CBD的距离为自变量的评价交通特性的模型。图6—1是对英国4个城市的研究结果,图中交通强度的单位
是103pcu/h/km 。图形符合指数模型,其模型如下: () a r A I /ex p -= (6—1) 式中: A 、a —— 待定参数; I —— 交通强度(pcu/h/km ); r —— 距CBD 的距离(km )。 式中的参数A 、a 在高峰时段和非高峰时段的标定值是不同的。此式表明,离CBD 越远,交通强度就越小。 二、平均速度 通过对英国6个城市的研究发现,车辆运行的平均速度与距离CBD 的距离有关。以市中心的放射线道路为研究对象,将道路按照一定的距离分割成若干段然后进行观测,并以观测数据建立模型,共建立了如下5种不同的模型: b ar u = (6—2) b ar c u += (6—3) br a u += (6—4) cr be a u --= (6—5) 2 22 21r cb a r b u ++= (6—6) 上述各式中a , b, c 为待定参数,u 是速度,r 的意义同上。 在上述模型中,线性模型(6—4)在应用中出现了较高的估计值,即随着r 值的增加,预测的速度增加过快,因此此式被淘汰。修正的幂函数(6—3),在应用中常常估计出负的速度值,因此也被淘汰,其余三个模型均可使用。图6—2显示的是对Nottingham 的数据分别用式(6—2)、式(6—5)、式(6—6)的拟合情况。图中,横坐标表示距中心区的距离(km ),纵坐标表示行程速度(km/h )。 0 2 (a) (b) (c)
第二章 交通流特性 第一节 交通调查 交通调查:在道路系统的选定点或选定路段,为了收集有关车辆(或行人)运行情况的数据而进行的调查分析工作。 意义:交通调查对搞好交通规划、道路设施建设和交通管理等都是十分重要的。 调查方法: (1)定点调查; (2)小距离调查(距离小于10m ); (3)沿路段长度调查(路段长度至少为500m ); (4)浮动观测车调查; (5)ITS 区域调查。 图2—1中,纵坐标表示车辆在行驶方向上距离始发点(任意选定)的长度,横坐标表示时间。图中的斜线代表车辆的运行轨迹,斜率为车速,直线相交表示超车。 穿过车辆运行轨迹的水平直线代表定点调查; 两条非常接近的水平平行直线表示小距离调查; 一条竖直直线表示沿路段长度调查(瞬时状态,例如空拍图片); 车辆的轨迹之一就可代表浮动车调查; ITS 区域调查类似于在不同时间、不同地点进行大量的浮动车调查。 图2—1 几种调查方法的时间—距离图示 时间(s ) 距离(m ) 高速公路车道
一、定点调查 定点调查包括人工调查和机械调查两种。 人工调查方法即选定一观测点,用秒表记录经过该点的车辆数。 机械调查方法常用的有自动计数器调查、雷达调查、摄像机调查等。 自动计数器调查法使用的仪器有电感式、环形线圈式、超声波式等检测仪器,它几乎适用于各种交通条件,特别是需要长期连续性调查的路段。 雷达调查法适用于车速高、交通量密度不大的情况。 摄像机调查法一般将摄像机安装在观测点附近的高空处,将镜头对准观测点,每隔一定的时间,如15s、30s、45s或60s,自动拍照一次,根据自动拍摄的照片上车辆位置的变化,清点出不同流向的交通量。这种方法可以获得较完全的交通资料,如流量、流向、自行车流及行人流和行驶速度、车头时距及延误等。 除这些方法以外,还有航空摄影调查法、光电管调查法等。 定点调查能直接得到流量、速度和车头时距的有关数据,但是无法测得密度。 二、小距离调查 这种调查使用成对的检测器(相隔5m或6m)来获得流量、速度和车头时距等数据。 目前常用的点式检测器,如感应线圈和微波束。调查地点车速时,将前后相隔一定距离(如5m)的检测器埋设地下,车辆经过两个检测器时发出信号并传送给记录仪,记录仪记录车辆通过两个检测器所使用的时间,那么用相隔的距离除以时间就得到地点车速。 这种调查方法还能得到占有率,占有率是指检测区域内车辆通过检测器的时间占观测总时间的百分比。由于占有率与检测区域的大小、检测器的性质和结构有关,因此同样的交通状态下,不同位置测得的占有率可能不同。 小距离调查同样无法测得密度,但可获得流量、速度、车头时距和占有率等数据。 三、沿路段长度调查 沿路段长度调查主要是指摄像调查法,适用于500m以上的较长路段。 摄像调查法首先对观测路段进行连续照像,然后在所拍摄的照片上直