
一、判断题
1.1 结构发生了变形,必然会引起位移,反过来,结构有位移必然有变形发生。
1.2 无法用图示单位荷载,来求图示结构中K点的全位移。
1.3 图示斜梁与水平梁弯矩图相同,刚度相同,所以两者的位移也相同。
1.4 图示两个图形相乘的结果是
1.5 判断下列图乘结果正确与否。
①②③④⑤⑥
1.6 已知图(a)结构的弯矩图,得到图(b)所示同一结构由于支座A的转动引起的C点的挠度等于
1.7 某桁架支座B被迫下沉5mm,并测得下弦结点相应的挠度如题1.7(a)图所示,此时桁架上无其它荷载。题1.7(b)图所示荷载作用下引起的支座B的反力为30kN。
1.8 图示虚拟力状态可求出AB两点的相对水平位移的cosβ倍。
1.9 鱼腹梁、等强度梁不能用图乘法求位移。
1.10拱和曲梁不能用图乘法求位移。
二、单项选择题
2.1 图示同一结构的两种状态,根据位移互等定理下列式子正确的是
A Δ1=Δ3
B θ2=θ4
C Δ3=θ2
D Δ1=θ4
2.2 图示同一结构的两种状态,根据位移互等定理下列式子正确的是
A α=γ+θ
B α=θ
C γ=α+β
D θ+γ=α+β
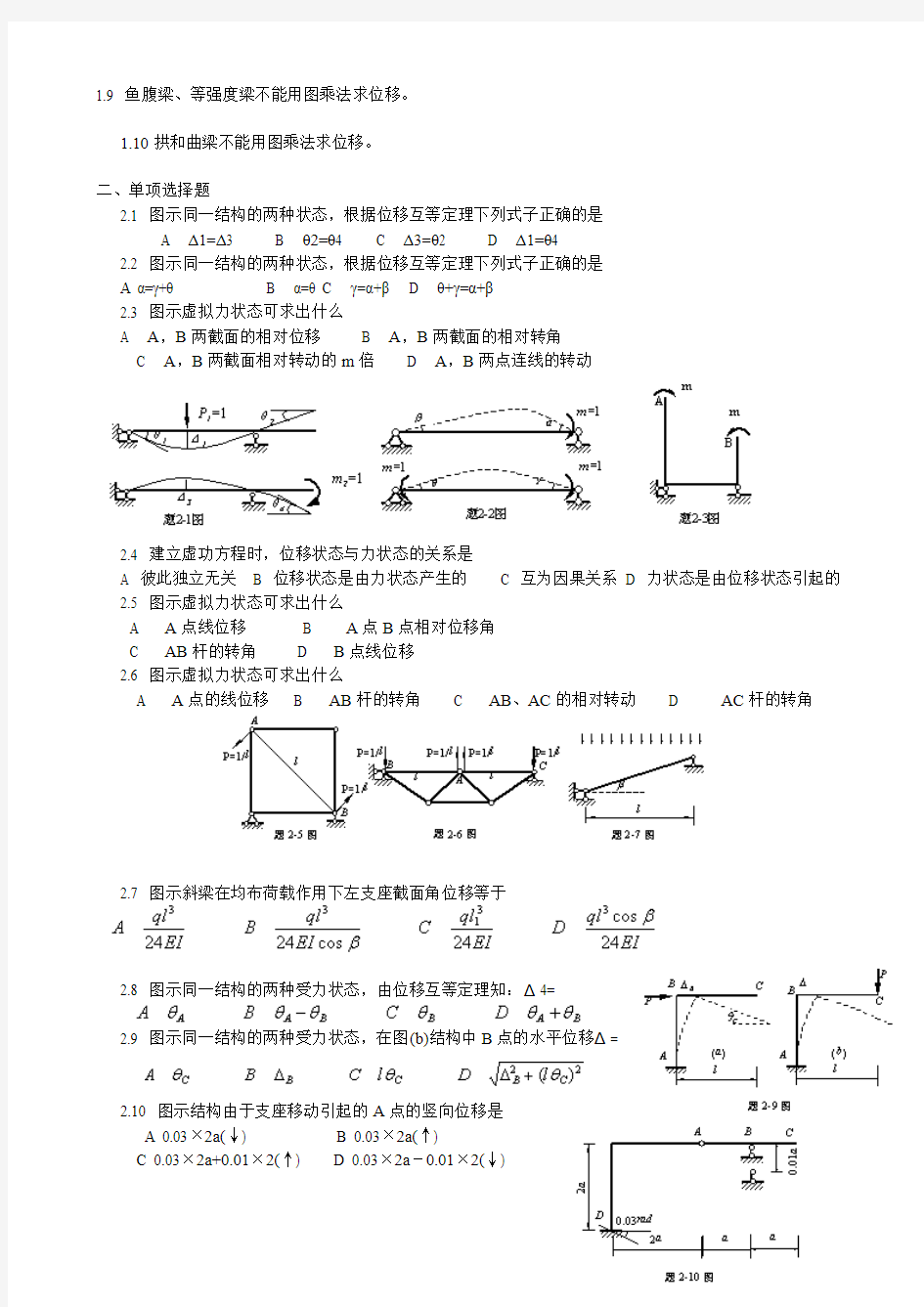
2.3 图示虚拟力状态可求出什么
A A,B两截面的相对位移
B A,B两截面的相对转角
C A,B两截面相对转动的m倍
D A,B两点连线的转动
2.4 建立虚功方程时,位移状态与力状态的关系是
A 彼此独立无关
B 位移状态是由力状态产生的
C 互为因果关系
D 力状态是由位移状态引起的
2.5 图示虚拟力状态可求出什么
A A点线位移
B A点B点相对位移角
C AB杆的转角
D B点线位移
2.6 图示虚拟力状态可求出什么
A A点的线位移
B AB杆的转角
C AB、AC的相对转动
D AC杆的转角
2.7 图示斜梁在均布荷载作用下左支座截面角位移等于
2.8 图示同一结构的两种受力状态,由位移互等定理知:Δ4=
2.9 图示同一结构的两种受力状态,在图(b)结构中B点的水平位移Δ=
2.10 图示结构由于支座移动引起的A点的竖向位移是
A 0.03×2a(↓)
B 0.03×2a(↑)
C 0.03×2a+0.01×2(↑)
D 0.03×2a-0.01×2(↓)
2.11 图示三铰拱的拉杆温度升高toC,由此引起的C点竖向位移是
A 5aαt/8(↓)
B 4aαt/5(↓)
C 4aαt (↓)
D 3aαt (↑)
2.12 图示结构仅在ABC部分温度升高,下列论述错误的是
A 整个结构不产生内力
B C点水平位移为零
C AB两点的相对位移为零
D C铰左右两截面的相对转角为零
2.13 已知梁(a)B截面的转角为,则梁(b)B截面的转角为
2.14 图示各桁架,C点能发生竖向位移的是
A (b)
B (b) (c)
C (a) (b)
D (a) (c)
第三章 静定结构的位移计算 一、判断题: 1、虚位移原理等价于变形谐调条件,可用于求体系的位移。 2、按虚力原理所建立的虚功方程等价于几何方程。 3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。 4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取: A. ; ; B. D. C. M =1 5、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。 6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。 M k M p 2 1 y 1 y 2 * * ωω ( a ) M =1 7、图a 、b 两种状态中,粱的转角?与竖向位移δ间的关系为:δ=? 。 8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。 A a a 9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。 二、计算题: 10、求图示结构铰A 两侧截面的相对转角?A ,EI = 常数。 q l l l /2 11、求图示静定梁D 端的竖向位移 ?DV 。 EI = 常数 ,a = 2m 。
a a a 10kN/m 12、求图示结构E 点的竖向位移。 EI = 常数 。 l l l l /3 2 /3 /3 q 13、图示结构,EI=常数 ,M =?90kN m , P = 30kN 。求D 点的竖向位移。 P 3m 3m 3m 14、求图示刚架B 端的竖向位移。 q 15、求图示刚架结点C 的转角和水平位移,EI = 常数 。 q 16、求图示刚架中D点的竖向位移。EI = 常数 。 l l l/2 17、求图示刚架横梁中D点的竖向位移。 EI = 常数 。
第4章 静定结构的位移计算习题解答 习题4.1 是非判断题 (1) 变形体虚功原理仅适用于弹性体系,不适用于非弹性体系。( ) (2) 虚功原理中的力状态和位移状态都是虚设的。( ) (3) 功的互等定理仅适用于线弹性体系,不适用于非线弹性体系。( ) (4) 反力互等定理仅适用于超静定结构,不适用于静定结构。( ) (5) 对于静定结构,有变形就一定有内力。( ) (6) 对于静定结构,有位移就一定有变形。( ) (7) 习题4.1(7)图所示体系中各杆EA 相同,则两图中C 点的水平位移相等。( ) (8) M P 图,M 图如习题4.1(8)图所示,EI =常数。下列图乘结果是正确的: 4 )832(12l l ql EI ??? ( ) (9) M P 图、M 图如习题4.1(9)图所示,下列图乘结果是正确的: 0332 02201111)(1y A EI y A y A EI ++ ( ) (10) 习题4.1(10)图所示结构的两个平衡状态中,有一个为温度变化,此时功的互等 定理不成立。( ) (a)(b) 习题 4.1(7)图
图 (b)M 图 (a)M P M (b)P M 图 (a) 习题 4.1(8)图 习题 4.1(9)图 (a)P 习题 4.1(10)图 【解】(1)错误。变形体虚功原理适用于弹性和非弹性的所有体系。 (2)错误。只有一个状态是虚设的。 (3)正确。 (4)错误。反力互等定理适用于线弹性的静定和超静定结构。 (5)错误。譬如静定结构在温度变化作用下,有变形但没有内力。 (6)错误。譬如静定结构在支座移动作用下,有位移但没有变形。 (7)正确。由桁架的位移计算公式可知。 (8)错误。由于取0y 的M 图为折线图,应分段图乘。 (9)正确。 (10)正确。 习题4.2 填空题 (1) 习题4.2(1)图所示刚架,由于支座B 下沉?所引起D 点的水平位移?D H =______。 (2) 虚功原理有两种不同的应用形式,即_______原理和_______原理。其中,用于求位移的是_______原理。 (3) 用单位荷载法计算位移时,虚拟状态中所加的荷载应是与所求广义位移相应的________。 (4) 图乘法的应用条件是:__________且M P 与M 图中至少有一个为直线图形。 (5) 已知刚架在荷载作用下的M P 图如习题4.2(5)图所示,曲线为二次抛物线,横梁的
静定结构的位移计算 一、判断题: 1、虚位移原理等价于变形谐调条件,可用于求体系的位移。 2、按虚力原理所建立的虚功方程等价于几何方程。 3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生力,但会有位移且位移只与杆件相对刚度有关。 4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取: A. ; ; B. D. C. =1 5、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。 6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。 M k M p 2 1 y 1 y 2 * * ωω ( a ) M =1 7、图a 、b 两种状态中,粱的转角?与竖向位移δ间的关系为:δ=? 。 二、计算题: 10、求图示结构铰A 两侧截面的相对转角?A ,EI = 常数。 q l l l /2 11、求图示静定梁D 端的竖向位移 ?DV 。 EI = 常数 ,a = 2m 。
a a a 10kN/m 12、求图示结构E 点的竖向位移。 EI = 常数 。 l l l /3 2 /3 /3 q 14、求图示刚架B 端的竖向位移。 q 15、求图示刚架结点C 的转角和水平位移,EI = 常数 。 17、求图示刚架横梁中D点的竖向位移。 EI = 常数 。 18、求图示刚架中D 点的竖向位移。 E I = 常数 。 q l l l/l/22
19、求图示结构A、B两截面的相对转角,EI=常数。 23 l/ l/3 20、求图示结构A、B两点的相对水平位移,E I = 常数。 l l 26、求图示刚架中铰C两侧截面的相对转角。 27、求图示桁架中D点的水平位移,各杆EA 相同。 a 30、求图示结构D点的竖向位移,杆AD的截面抗弯刚度为EI,杆BC的截面抗拉(压)刚度为EA。
1 : 图 a 桁 架, 力 法 基 本 结 构 如 图 b ,力 法 典 型 方 程 中 的 系 数 为 :( ) 3. 2:图示结构用力矩分配法计算时,结点A 的约束力矩(不平衡 力矩)为(以顺时针转为正) ( ) 4.3Pl/16 3:图示桁架1,2杆内力为: 4. 4:连续梁和 M 图如图所示,则支座B 的竖向反力 F By 是:
4.17.07(↑) 5:用常应变三角形单元分析平面问题时,单元之间()。 3.应变、位移均不连续; 6:图示体系的几何组成为 1.几何不变,无多余联系; 7:超静定结构在荷载作用下的内力和位移计算中,各杆的刚度为() 4.内力计算可用相对值,位移计算须用绝对值 8:图示结构用力矩分配法计算时,结点A之杆AB的分配系数
μAB 为(各杆 EI= 常数)( ) 4.1/7 9:有限元分析中的应力矩阵是两组量之间的变换矩阵,这两组量是( )。 4.单元结点位移与单元应力 10:图示结构用位移法计算时,其基本未知量数目为( ) 4.角位移=3,线位移=2 11:图示结构,各柱EI=常数,用位移法计算时,基本未知量数 目是( ) 3.6 12:图示结构两杆长均为d,EI=常数。则A 点的垂直位移为( ) 4.qd 4/6EI (↓) 13:图示桁架,各杆EA 为常数,除支座链杆外,零杆数为:
1.四 根 ; 14:图示结构,各杆线刚度均为i,用力矩分配法计算时,分配 系数μAB 为( ) 2. 15:在位移法中,将铰接端的角位移,滑动支撑端的线位移作为基本未知量: 3.可以,但不必; 1:用图乘法求位移的必要条件之一是:( ) 2.结构可分为等截面直杆段; 2:由于静定结构内力仅由平衡条件决定,故在温度改变作用下静定结构将( ) 2.不产生内力 3:图示结构,各杆EI=常数,欲使结点B 的转角为零,比值P1/P2应 为( ) 2.1
第3章 静定结构位移计算 §3 – 1 基本概念 3-1-1 虚拟单位力状态构造方法 ●虚拟单位力状态构造方法: (1)去掉所有荷载重画一个结构; (2)标出所求位移矢量; (3)该矢量变成单位力,即得虚拟单位力状态。 如图3-1a 刚架求C 点竖向位移CV ?和C 截面转角 C ?,图3-1b 和图3-1c 为求相应位移所构造的虚拟单位 力状态。 3-1-2 位移计算公式 虚拟单位力作用下,引起的内力和支座反力: N Q ,,,Ri F M F F 实际荷载作用下,引起的内力: NP P QP ,,F M F ●位移计算一般公式 N Q Ri i F du Md F ds F c ??γ=++-∑∑∑∑??? ●荷载作用产生位移的计算公式 Q N QP NP P k F F F F M M ds ds ds EA EI GA ?=++∑∑∑? ?? 1、梁或刚架结构 P M M ds EI ?=∑? 2、桁架结构 N NP F F ds EA ?=∑? 图3-1虚拟单位力状态 ) a () b () c (
2 结构力学典型例题解析 3、混合结构 N NP P F F MM ds ds EA EI ?=+∑∑? ? ●支座移动引起位移计算公式 Ri i F c ?=-∑ ●温度引起位移计算公式 ()N 0t F t dx M dx h α??α=+±∑∑?? ()N 0M t t lF A h α??α=+±∑∑ 式中:0,,t t α?为线膨胀系数形心温度温差,h 截面高度 M A 虚拟状态弯矩图面积 ●有弹性支座情况的位移计算公式 ()P RP R 0RP R M M F ds F EI k Ay F F EI k ?=+?±=+? ∑∑? ∑∑ 3-1-3 图乘法 图乘法公式: 0P ()Ay MM dx EI EI ±?==∑∑? 图乘法公式条件: ●等截面直杆且EI=常数 ●求 y 0图形必须为一条直线 正负号确定: 面积A 与y 0同侧取“+”号 注意:求面积的图形要会求面积和形心位置。 为使计算过程简洁、明了,先将面积和形心处对应弯矩求出标在弯矩图一侧,然后直接代入图乘法公式求得位移。 图3-2 图乘法示意图
第6章 结构位移计算和刚度校核 到上节课为止,我们把五种静定杆件结构的计算问题全讨论过了。我们知道内力计算问题属强度问题→是结力讨论的首要任务。 讲第一章时,结力的第二大任务:刚度问题,而要解决…,首先应该… 杆件结构位移计算 (结构变形+刚度位移) → { 刚度校核 截面设计 确定P max 又是超静定结构计算的基础(双重作用)。另外本章主要讨论各种杆件结构的位移 计算问题。 结构位移计算的依据是虚功原理,所以本章先讨论刚体、变形体的虚功原理,然后推导出杆件结构位移计算的一般公式,再讨论各种具体结构的位移计算。 §6-1概述 一、 结构的位移 画图:梁、刚架、桁架 (内力N 、Q 、M ——拉伸、剪切、弯曲) 截面C 线位移:C ? 角位移:C ? 结点的线位移: 两点(截面)相对线位移: 杆件的角位移: AB ? 两截面相对角位移: 两杆件相对角位移: 1、位移定义:由于结构变形或其它原因使结构各点的位置产生(相对)移动(线位移),使杆件横截面产生(相对)转动(角位移)。 截面C 线位移:C ?。一般 分解 成水平、垂直两方向: CH ?、CV ? 角位移:C ?
2、位移的分类:6种 绝对位移:点(截面)线位移——分解成水平、垂直两方向 截面角位移: 杆件角位移: 相对位移:两点(截面)相对线位移——沿连线方向 两截面相对角位移: 两杆件相对角位移: 统称为: 广义位移:角、线位移;相对、绝对位移 Δki:k:产生位移的方向;i:引起位移原因。如ΔA P、Δat、ΔA C 广义力:集中力、力偶、分布荷载,也可以是上述各种力的综合 二、引起位移的原因 1、荷载作用:(荷载→内力→变形→位移) 2、温度改变:静定结构,温度改变,→0应力非0应变→结构变形 (材料胀缩引起的位移性质同) 3、支座移动;(无应力,无应变,但几何位置发生变化) {刚体位移(制造误差同) 变形位移 三、计算位移的目的 1)刚度验算:最大挠度的限制 (框架结构弹性层间位移限值1/450) 2)为超静定结构的弹性分析打下基础 3)预先知道变形后的位置,以便作出一定的施工措施: (起重机吊梁、板)(屋架安装)(建筑起拱)(屋窗、门、过梁)(结构要求高,精密)四、计算位移的有关假定(简化计算) 1)弹性假设 2)小变形假设 建立平衡、应变与位移、位移与荷载成线性关系 3)理想约束(联结,不考虑阻力摩擦) 变形体系{ 线性变形体系(线弹性体系) 荷载和位移呈线性关系,且荷载全撤除后位移将全部消 失,无残余变形,(可用位移叠加原理) 非线形变形体系 (分段线形叠加) 4)位移叠加原理(类似内力、反力叠加)
6-1 求图示桁架AB 、AC 的相对转角,各杆EA 为常量。 解:(1)实状态桁架各杆的轴力如图(b )所示。 (b)(a) N (d )(c)题6-1 (2)建立虚设单位力状态如(c )所示,求AB 杆的转角。 1113(2)82i P i AB i i P a P a P a N N l P a a a E A EA EA EA EA ?????-?-???==++?=∑(?) (3)建立虚设单位力状态如(d )所示,求AC 杆的转角。 113(2)() (72i P i AC i i P a P a N N l P a a E A EA EA EA ????-?-??== +?=∑(?) 故,AB 、AC 的相对转角为两杆转角之差: 8(7(10.414AB AC P P P P EA EA EA EA ???+-=-= -==-(夹角减小) 6-2 求半圆曲梁中点K 的竖向位移。只计弯曲变形。EI 为常数。 方法一 解:(1)荷载作用下的实状态的约束反力如图(a )所示。以任意半径与水平坐标轴的顺时针夹角为自变量,其弯矩方程为: sin (0)P M θθπ=-≤≤Pr (2)建立虚设单位力状态如(b )所示,其弯矩方程为: []1 cos )(0)2211cos()cos )()222 i M πθθππθθθπ?≤≤??=??-=≤≤??(r -r r -r (r +r
(a) 题6-2 (3)积分法求半圆曲梁中点K 的竖向位移。 2 02 3322 0022 311 cos )(sin )cos )(sin )2211cos )sin cos )sin sin sin 2)sin sin 2)2222cos 2i V P k Pr Pr M M ds rd rd EI EI EI Pr Pr d d d d EI EI Pr EI π ππππππππθθθθθθ θθθθθθθθθθθθθ?-?-??==+????=-?+?=-+????????? =-∑? ??????(r -r (r +r (-(+(-(+(-11320 211cos 2)cos cos 2)442Pr EI π ππθθθ????+-+=-↑??? ?()( 方法二:本题也可以只算纵向对称轴左边,再乘2。 题6-2 (a) 203322003 320 1 sin )(Pr cos ) 221sin )cos cos sin 2)2 1sin cos 2)42i V P k M M ds rd EI EI Pr Pr d d EI EI Pr Pr EI EI π πππ θθθ θθθθθθθθ?-??===-?=-=-+=-↑∑????() (r -r (-(-(1 6-3 求梁的自由端的挠度。EI 为常数。 方法一 :(积分法) 解:(1)荷载作用的实状态,以及坐标如图(a ),其弯矩方程为: ()2 1 (0)2 M x qlx qx x l =--≤< (2)建立虚设单位力状态,以及坐标如图(b )所示,其弯矩方程为:()(0)i M x x x l =-≤<
一、判断题 1.1 结构发生了变形,必然会引起位移,反过来,结构有位移必然有变形发生。 1.2 无法用图示单位荷载,来求图示结构中K点的全位移。 1.3 图示斜梁与水平梁弯矩图相同,刚度相同,所以两者的位移也相同。 1.4 图示两个图形相乘的结果是 1.5 判断下列图乘结果正确与否。 ①②③④⑤⑥ 1.6 已知图(a)结构的弯矩图,得到图(b)所示同一结构由于支座A的转动引起的C点的挠度等于 1.7 某桁架支座B被迫下沉5mm,并测得下弦结点相应的挠度如题1.7(a)图所示,此时桁架上无其它荷载。题1.7(b)图所示荷载作用下引起的支座B的反力为30kN。 1.8 图示虚拟力状态可求出AB两点的相对水平位移的cosβ倍。
1.9 鱼腹梁、等强度梁不能用图乘法求位移。 1.10拱和曲梁不能用图乘法求位移。 二、单项选择题 2.1 图示同一结构的两种状态,根据位移互等定理下列式子正确的是 A Δ1=Δ3 B θ2=θ4 C Δ3=θ2 D Δ1=θ4 2.2 图示同一结构的两种状态,根据位移互等定理下列式子正确的是 A α=γ+θ B α=θ C γ=α+β D θ+γ=α+β 2.3 图示虚拟力状态可求出什么 A A,B两截面的相对位移 B A,B两截面的相对转角 C A,B两截面相对转动的m倍 D A,B两点连线的转动 2.4 建立虚功方程时,位移状态与力状态的关系是 A 彼此独立无关 B 位移状态是由力状态产生的 C 互为因果关系 D 力状态是由位移状态引起的 2.5 图示虚拟力状态可求出什么 A A点线位移 B A点B点相对位移角 C AB杆的转角 D B点线位移 2.6 图示虚拟力状态可求出什么 A A点的线位移 B AB杆的转角 C AB、AC的相对转动 D AC杆的转角 2.7 图示斜梁在均布荷载作用下左支座截面角位移等于 2.8 图示同一结构的两种受力状态,由位移互等定理知:Δ4= 2.9 图示同一结构的两种受力状态,在图(b)结构中B点的水平位移Δ= 2.10 图示结构由于支座移动引起的A点的竖向位移是 A 0.03×2a(↓) B 0.03×2a(↑) C 0.03×2a+0.01×2(↑) D 0.03×2a-0.01×2(↓)
第5章 静定结构位移计算 §5 – 1 基本概念 5-1-1 虚拟单位力状态构造方法 ●虚拟单位力状态构造方法: (1)去掉所有荷载重画一个结构; (2)标出所求位移矢量; (3)该矢量变成单位力,即得虚拟单位力状态。 如图3-1a 刚架求C 点竖向位移CV ?和C 截面转角 C ?,图3-1b 和图3-1c 为求相应位移所构造的虚拟单位 力状态。 5-1-2 位移计算公式 虚拟单位力作用下,引起的内力和支座反力: N Q ,,,Ri F M F F 实际荷载作用下,引起的内力: NP P QP ,,F M F ●位移计算一般公式 N Q Ri i F du Md F ds F c ??γ=++-∑∑∑∑??? ●荷载作用产生位移的计算公式 Q N QP NP P k F F F F M M ds ds ds EA EI GA ?=++∑∑∑? ?? 1、梁或刚架结构 P M M ds EI ?=∑? 2、桁架结构 N NP F F ds EA ?=∑? 图3-1虚拟单位力状态 ) a () b () c (
2 结构力学典型例题解析 3、混合结构 N NP P F F MM ds ds EA EI ?=+∑∑? ? ●支座移动引起位移计算公式 Ri i F c ?=-∑ ●温度引起位移计算公式 ()N 0t F t dx M dx h α??α=+±∑∑?? ()N 0M t t lF A h α??α=+±∑∑ 式中:0,,t t α?为线膨胀系数形心温度温差,h 截面高度 M A 虚拟状态弯矩图面积 ●有弹性支座情况的位移计算公式 ()P RP R 0RP R M M F ds F EI k Ay F F EI k ?=+?±=+? ∑∑? ∑∑ 5-1-3 图乘法 图乘法公式: 0P ()Ay MM dx EI EI ±?==∑∑? 图乘法公式条件: ●等截面直杆且EI=常数 ●求 y 0图形必须为一条直线 正负号确定: 面积A 与y 0同侧取“+”号 注意:求面积的图形要会求面积和形心位置。 为使计算过程简洁、明了,先将面积和形心处对应弯矩求出标在弯矩图一侧,然后直接代入图乘法公式求得位移。 图3-2 图乘法示意图
静定结构位移计算试题 一、是非判断: 1.变形体虚功原理仅适用于线弹性体系,不适用于非线弹性体系。( ) 2.虚功中的力状态和位移状态是彼此独立无关的,这两个状态中的任何一个都可看作是虚设的。( ) 3.功的互等定理仅适用于线弹性体系,不适用于非线弹性体系。( ) 4.位移反力互等定理对线弹性的静定结构和超静定结构均适用。( ) 5.图1-5(a)、(b)各杆EA 相同,则两图中C 点的竖向位移相等。( ) 题1-5图 题1-6图 6.如图题1-6所示斜梁EI =常数,则截面A 的转角EI ql A 243 = ?(顺时针)。( ) 7.图题1-7(a)、(b) 各杆EA 相同,则两图中C 点的竖向位移相等。( ) 题1-7图 8.M P 图、M 图1-8(a)、(b)所示,EI=常数。下列图乘结果是正确的: )8 5 323221(1l al l al EI CH ?+?=?。 ( ) 题1-8图 9.图题1-9中,下列图乘结果是正确的: )3 1(1))(31(132221111y b l EI y b a l y b l EI ?+?-+?。 ( ) 10.图1-10中,下列图乘结果是正确的: )8 5 323221(1d bc d ac EI ?+?。 ( ) 11.对于静定结构,没有内力就没有变形。( ) 12.对于静定结构,没有变形就没有位移。( ) 13.用单位荷载法计算结构位移时,用于计算外力虚功的广义力是虚设的广义单位力,而相应的广义位移是拟求的实际位移。( ) q (a) (b) l a a q A B P (b)M 图
题1-9图 题1-10图 14.如果结构是由线弹性材料制成的,但在有温度变化的情况下,功的互等定理不成立。( ) 二、填空 1.虚功原理有两种不同的应用形式,即 原理和 原理。其中 原理等价于变形协调条件。 2.位移计算时,虚拟广义单位力的原则是使外力虚功的值恰好等于 值。 3.用图乘法计算梁和刚架位移的适用条件是 。 4.如图2-4所示结构支座A 下沉a ,支座B 向右移动b ,则结点C 、D 的相对转角为 。 题2-4图 题2-5图 题2-6图 5.如图2-5所示结构中的AB 杆比原设计长度做短了1.5cm ,由此引起C 点的竖向位移为 ;引起支座A 的水平反力为 。 6.如图2-6所示三铰刚架,EI=常数。铰C 的竖向位移为 。 7.如图2-7所示结构,EI=常数。铰C 两截面的相对转角为 。 8.已知图2-8所示连续梁支座B 的反力为)(16 11 ↑=P R B ,则该连续梁在支座B 下沉1=?BV 时,D 点的竖向位移DV ?为 。 题2-7图 题2-8图 9.已知图2-9(a)所示简支梁在C 点作用集中力P =1kN 时,截面B 的角位移为0.005弧度,则该梁在截面 a b 1ω 2ω 3ω EI 1 EI 2 (a)M P 图 y 2 (a)M P 图 (b)M 图 C C P D B DV ? 1 =BV (a) (b)
第5章 静定结构位移计算 习题 5-1:由积分法求图示悬臂梁C 点的竖向位移CY ?,杆件的EI 为常数。 题5-1图 5-2:由积分法求图示悬挑梁C 点、D 点的竖向位移CY ?和DY ?,杆件EI 为常数。 题5-2图 5-3:图示刚架的A 支座向下发生了a 的移动,向左发生了b 的移动,求由此引起C 点的转角C ??和D 点的竖向位移DY ?。 题5-3图 题5-4图 5-4:图示刚架的A 支座向下发生了a 的移动,C 支座向右发生了b 的移动,求由此引起铰D 两侧截面的相对转角D ??和E 点的竖向位移EY ?。 5-5:图示桁架的CE 杆由于制造误差比设计短了a ,试计算由此引起的D 点水平位移DX ?。杆件的EA 均相同。 m 4kN
题5-5图 5-6:图示桁架的EB 杆由于制造误差比设计短了a ,试计算由此引起的D 点水平位移DX ?。杆件的EA 均相同。 题5-6图 5-7:求图示桁架E 点的竖向位移 EY ?、FG 杆的转角 FG ??,所有杆件EA 相同。 题5-7图 5-8:求出图示桁架C 点的竖向位移 CY ?,所有杆件的EA 相同。
题5-8图 5-9:求图示结构的C 、D 两点的相对水平位移 CDX ?,所有杆件的EI 相同。 题5-9图 5-10:求图示结构D 点的水平位移 DX ?,所有杆件的EI 相同。 题5-10图 5-11:计算图示结构D 点的转角 D ??,所有杆件的EI 相同,弹簧刚度系数为k 。 10kN
题5-11图 5-12:试求图示结构G 点的水平位移GX ?,所有杆件的EI 均为常量。 题5-12图 5-13:用图乘法求图示结构D 点的竖向位移DY ?,所有杆件的EI 相同,弹簧的刚度系数为k 。 题5-12图 5-14:求图示结构A 点的水平位移 AX ?、D 点的转角 D ??,所有杆件的EI 相同。 q kN
结构力学期末考试题 一、名词解释: 1、 结构的计算简图 答:用一个简化的图型来代替实际图形称为计算简图。 2、几何不变体 答:在不考虑材料应变的情况下,体系的形状和位置是不能改变的。 3、自由度 答:等于一个体系运动时可以改变的坐标的数目。 4、多余约束 答:如果在一个体系中增加一个约束,而体系的自由度并不因此而改变,则该约束称为多余约束。 5、内力影响线 答:表示单位移动荷载作用下内力变化规律的图形。 6、内力包络图 答:连接各截面内力最大值的曲线。 7、位移互等定理 答:在任一线性变形体中,由荷载1引起的与荷载2相应的位移影响系数等于由荷载2引起的与荷载1相应的位移影响系数。 8、超静定结构 答:一个结构,如果它的支座反力和各截面内力不能完全由静力平衡条件唯一的确定,称为超静定结构。 9、无侧移刚架 答:如果刚架的各结点(不包括支座)只有角位移,没有线位移称为~。 10、线刚度 答:杆件单位长度的抗弯刚度。用EI/L 表示。 11、形常数和载常数 答:用位移法求超静定结构时,只与杆件截面尺寸和材料性质有关的常数称为形常数,只与荷载有关的常数称为载常数。 12、转动刚度 答:表示杆端对转动的抵抗能力。 二、简答题 1、简述进行结构几何构造分析的目的 答:就是检查结构是否是一个几何不变体。 2、试简述影响线与内力图的区别? 答:影响线:单位移动荷载、横坐标表示单位荷载的作用位置,纵坐标表示指定截面单位内力。内力图:荷载有不变的大小、方向、作用线,横坐标表示截面位置,纵坐标表示相应截面内力大小。 3、力法和位移法的解题思路? 答:力法:以多余未知力为基本未知量,用变形协调条件列出基本方程。 位移法:以独立的位移量为基本未知量,用结点或截离体列出平衡方程。 4、已知两端固定的单跨超静定梁AB ,其A 端的转角位移方程为: M AB =4i AB θA +2 i AB θ B -F AB B A M l i +?/6,
静定结构位移计算测试题 一.选择题 4-1 与图示结构上的广义力相对应的广义位移为( )。 A . B 点水平位移;B .A 点水平位移; C .AB 杆的转角; D .AB 杆与AC 杆的相对转角 P P 题4-1图 题4-2图 4-2 图示结构加P1F 引起位移11Δ、21Δ,再加P2F 又产生新的位移12Δ、22Δ,两个力所作的总功为( )。 A .22P21211P1)(ΔF ΔΔF W ++=; B .22P21211P12 1 )(ΔF ΔΔF W ++=; C .22P212P111P12 1 21ΔF ΔF ΔF W ++= ; D .)()(2221P21211P1ΔΔF ΔΔF W +++= 4-3 变形体虚功原理适用于( )。 A .线弹性体系; B .任何变形体; C .静定结构; D .杆件结构 4-4 图示结构中,位移之间的关系成立的有( )。 A .643θθθ+=,82ΔΔ=,74θθ=; B .315θθ+=?,86ΔΔ=,921θθθ=+ C .642θθ+=?,85ΔΔ=,93θθ=; D .642θθ+=Δ,68θ=Δ,973θθθ+= 4-5 下面说法中正确的一项是( )。 A .图乘法适用于任何直杆结构; B .虚功互等定理适用于任何结构; C .单位荷载法仅适用于静定结构; D .位移互等定理仅适用于线弹性结构 二.填充题 4-6 若使图示结构的A 点竖向位移为零,则应使P1F 与P2F 的比值为P2P1/F F = 。 P2 题4-6图 题4-7图 4-7 图示结构中,AB 杆的温度上升t 度,已知线膨胀系数为α,则C 点的竖向位移为 。 4-8 上题结构中的AB 杆,由于加热而伸长了Δ,则由此产生的C 点竖向位移为 。 4-9 上题结构中的AB 杆,由于制作时作长了Δ,则由此产生的C 点竖向位移为 。 三.计算题 4-10 试求图示桁架A 点竖向位移。已知各杆截面相同,2 2m 105.1-?=A ,210GPa =E 。 题4-10图 4-11图
第4章静定结构的位移计算习题解答 习题4.1 是非判断题 (1 变形体虚功原理仅适用于弹性体系,不适用于非弹性体系。( (2 虚功原理中的力状态和位移状态都是虚设的。( (3 功的互等定理仅适用于线弹性体系,不适用于非线弹性体系。( (4 反力互等定理仅适用于超静定结构,不适用于静定结构。( (5 对于静定结构,有变形就一定有内力。( (6 对于静定结构,有位移就一定有变形。( (7 习题4.1(7图所示体系中各杆EA 相同,则两图中C 点的水平位移相等。( (8 M P 图,M 图如习题4.1(8图所示,EI =常数。下列图乘结果是正确的: 4 832(12l l ql EI ??? ( (9 M P 图、M 图如习题4.1(9图所示,下列图乘结果是正确的: 0332 02201111(1y A EI y A y A EI ++ ( (10 习题4.1(10图所示结构的两个平衡状态中,有一个为温度变化,此时功的互等 定理不成立。(
F C C F l (aP l l (b P l 习题 4.1(7图图 (bM l /4 1 图 (aM P l 8
1ql 2q M 图 (bP M 图 (a1 02 y A 3A 2 1A 2 EI EI 1 01 y 03 y 习题 4.1(8图习题 4.1(9图(a(b F P t 12 t
习题 4.1(10图 【解】(1错误。变形体虚功原理适用于弹性和非弹性的所有体系。 (2错误。只有一个状态是虚设的。 (3正确。 (4错误。反力互等定理适用于线弹性的静定和超静定结构。 (5错误。譬如静定结构在温度变化作用下,有变形但没有内力。 (6错误。譬如静定结构在支座移动作用下,有位移但没有变形。 (7正确。由桁架的位移计算公式可知。 (8错误。由于取0y 的M 图为折线图,应分段图乘。 (9正确。 (10正确。习题4.2 填空题 (1 习题4.2(1图所示刚架,由于支座B 下沉?所引起D 点的水平位移?D H =______。 (2 虚功原理有两种不同的应用形式,即_______原理和_______原理。其中,用于求位移的是_______原理。 (3 用单位荷载法计算位移时,虚拟状态中所加的荷载应是与所求广义位移相应的________。 (4 图乘法的应用条件是:__________且M P 与M 图中至少有一个为直线图形。 (5 已知刚架在荷载作用下的M P 图如习题4.2(5图所示,曲线为二次抛物线,横梁的 抗弯刚度为2EI ,竖杆为EI ,则横梁中点K 的竖向位移为________。 (6 习题4.2(6图所示拱中拉杆AB 比原设计长度短了1.5cm ,由此引起C 点的竖向位移为________;引起支座A 的水平反力为________。 (7 习题4.2(7图所示结构,当C 点有F P =1(↓作用时,D 点竖向位移等于?(↑,当E 点有图示荷载作用时,C 点的竖向位移为________。 (8 习题4.2(8图(a 所示连续梁支座B 的反力为(16 11R ↑=B F ,则该连续梁在支座B
结构力学习题 第2章平面体系的几何组成分析2-1~2-6 试确定图示体系的计算自由度。 题2-1图题2-2图 题2-3图题2-4图 题2-5图题2-6图 2-7~2-15 试对图示体系进行几何组成分析。若是具有多余约束的几何不变体系,则需指明多余约束的数目。
题2-7图 题2-8图题2-9图 题2-10图题2-11图 题2-12图题2-13图 题2-14图题2-15图
题2-16图题2-17图 题2-18图题2-19图 题2-20图题2-21图2-1 1 W = 2-1 9- W = 2-3 3- W = 2-4 2- = W 2-5 1- W = 2-6 4- W = 2-7、2-8、2-12、2-16、2-17无多余约束的几何不变体系 2-9、2-10、2-15具有一个多余约束的几何不变体系 2-11具有六个多余约束的几何不变体系 2-13、2-14几何可变体系为
2-18、2-19 瞬变体系 2-20、2-21具有三个多余约束的几何不变体系 第3章静定梁和静定平面刚架的内力分析3-1 试作图示静定梁的内力图。 (a)(b) (c) (d) 习题3-1图 3-2 试作图示多跨静定梁的内力图。 (a) (b)
(c) 习题3-2图 3-3~3-9 试作图示静定刚架的内力图。 习题3-3图习题3-4图 习题3-5图习题3-6图 习题3-7图习题3-8图
习题3-9图 3-10 试判断图示静定结构的弯矩图是否正确。 (a) (b) (c) (d) 部分习题答案 3-1 (a )m kN M B ?=80(上侧受拉),kN F R QB 60=,kN F L QB 60-= (b )m kN M A ?=20(上侧受拉),m kN M B ?=40(上侧受拉),kN F R QA 5.32=, kN F L QA 20-=,kN F L QB 5.47-=,kN F R QB 20=
习题 一.选择题 4-1 与图示结构上的广义力相对应的广义位移为( C )。 A . B 点水平位移;B .A 点水平位移; C .AB 杆的转角; D .AB 杆与AC 杆的相对转角 P P 题4-1图 题4-2图 4-2 图示结构加P1F 引起位移11Δ、21Δ,再加P2F 又产生新的位移12Δ、22Δ,两个力所作的总功为( C )。 A .22P21211P1)(ΔF ΔΔF W ++=; B .22P21211P12 1)(ΔF ΔΔF W ++=; C .22P212P111P12 12 1ΔF ΔF ΔF W + += ; D .)()(2221P21211P1ΔΔF ΔΔF W +++= 4-3 变形体虚功原理适用于( B )。 A .线弹性体系; B .任何变形体; C .静定结构; D .杆件结构 4-4 图示结构中,位移之间的关系成立的有( D )。 A .643θθθ+=,82ΔΔ=,74θθ=; B .315θθ+=?,86ΔΔ=,921θθθ=+ C .642θθ+=?,85ΔΔ=,93θθ=; D .642θθ+=Δ,68θ=Δ,973θθθ+= 4-5 下面说法中正确的一项是(D )。 A .图乘法适用于任何直杆结构; B .虚功互等定理适用于任何结构; C .单位荷载法仅适用于静定结构; D .位移互等定理仅适用于线弹性结构 二.填充题 4-6 若使图示结构的A 点竖向位移为零,则应使P1F 与P2F 的比值为P2P1/F F = 16/5 。 P2 题4-6图 题4-7图 4-7 图示结构中,AB 杆的温度上升t 度,已知线膨胀系数为α,则C 点的竖向位移为 4ALT 。 4-8 上题结构中的AB 杆,由于加热而伸长了Δ,则由此产生的C 点竖向位移为 2 。 4-9 上题结构中的AB 杆,由于制作时作长了Δ,则由此产生的C 点竖向位移为 。 三.计算题 4-10 试求图示桁架A 点竖向位移。已知各杆截面相同,2 2 m 10 5.1-?=A ,210GPa =E 。 题4-10图 题4-11图
静定结构的位移计算 一、判断题: 1、 虚位移原理等价于变形谐调条件,可用于求体系的位移。 2、 按虚力原理所建立的虚功方程等价于几何方程。 3、 在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力, 但会有位移且位移只与杆件相对刚度有关。 4、 求图示梁铰C 左侧截面的转角时,其虚拟状态应取: 5、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形 体系。 p = i A t 心 (a ) 7、图a 、b 两种状态中,粱的转角 与 竖向位移 间的关系为: 二、计算题: 10、求图示结构铰 A 两侧截面的相对转角 A , 6、已知M p 、M k 图,用图乘法求位移的结杲为: (i y i 2 丫2)/ (El)。 M = 1 B 尬1 .] (b) 11、求图示静定梁 D 端的竖向位移 DV 。 EI= 常数,a = 2m 。 EI =常数。 M =1 M =1 C ; D.' C
10kN/m 18、求图示刚架中 D 点的竖向位移。 E I =常数 q D 4" 1 J — 1 1 1/ 2 1/2 一 12、求图示结构 E 点的竖向位移。 EI =常数。 I 1/3 2 1 /3 1/3 ------- -------- -r --------- -+-—— - 14、求图示刚架B 端的竖向位移。 q 2EI B EI 1/2 J. 15、求图示刚架结点 C 的转角和水平位移,EI =常数。 1/2 17、求图示刚架横梁中 D 点的竖向位移。 EI =常数 q Wf 川丨门- D ' a C a
ΔC ΔCy ΔCx 第四章 静定结构结构位移计算 学习目的和要求 静定结构位移计算是演算结构刚度和计算超静定结构所必需的。变形体虚功原理是结构力学结构力学中的重要理论。位移计算公式就是在此原理上得到的,对于近一学习也起到奠基性的作用。 本章基本要求: 1、了解温度改变、支座移动引起的位移计算。 2、领会变形体虚功原理和互等定理。 3、掌握实功、虚功、广义力、广义位移的概念。 4、熟练荷载产生的位移计算。 5、熟练掌握图乘法求位移。 学习内容 实功和虚功、广义力和广义位移,变形体虚功原理,功的互等定理、位移互等定理、反力互等定理。静定结构在荷载作用下产生的位移计算;支座移动、温度改变产生的位移计算。刚架和梁的位移计算图乘法。 §4.1 应用虚力原理求刚体体系位移 1、 结构的位移: 结构在荷载作用下,要产生内力和变形,结构的变形引起结构的位移,位移一般分为线位移和角位移两种,线位移是指结构上点的移动,角位移是指杆件横截面产生的转动。 2、 计算位移的目的: (1) 验算结构的刚度。结构变形不得超过规范规定的容许值。 (2) 为超静定结构的内力分析打基础。超静定结构的计算要同时满足平衡条件和变形连续条件。 (3) 结构制作、施工过程中也常需先知道结构的位移 2、 产生位移的主要原因 产生位移的主要原因主要由上述三种:①荷载作用、②温度改变和材料胀缩、③支座移动和制造误差。 各种因素对静定结构的影响 (1)荷载使静定结构产生内力、变形、位移; (2)温度改变或材料胀缩使静定结构不产生内力、但能产生变形、位移;
iP (3)支座移动或制造误差使静定结构不产生内力变形、但能产生位移; 4、位移计算方法: 本章只讨论线性变形体系的位移计算,计算方法是单位荷载法,其理论基础是虚功原理。 由于线性变形体系和叠加原理的使用条件都是:①材料处于弹性阶段,应力与应变之间成正比; ②结构变形微小,不影响力的作用。所以,对线性变形体系的位移计算,可以应用叠加原理。 §4.2 结构位移计算的一般公式 如结构在荷载、温度改变、支座移动等因素作用下而发生了图1所示变形和位移,这是结构的实 际的位移状态。要利用虚功方程求位移Δi2(状态②中i方向的位移)。应先虚拟力状态:在欲 求位移处沿着求位移的方向,加上与所求位移相应的广义单位荷载(如图2)。求出虚拟力状态 的内力和反力。由虚功方程,即得平面杆系结构位移计算的一般公式: 该式适用于:①静定结构和超静定结构; ②弹性体系和非弹性体 系; ③各种因素产生的位移计算。 §4.3 荷载作用下的位移计算 如果弹性体系由荷载产生了内力(M P,N P,Q P), 而内力产生的变形可由材料力学公式得到 代入虚功方程式得: 几点注意: 1.该式可用来求弹性体系由荷载产生的位移;
结构位移计算作业 01 (0401-0410 为课后练习,答案已给出) 0401 3132 虚功中的力状态和位移状态是彼此独立无关的, 这两个状态中的任一个都可看作是虚设的。 ( )O 0401 3133 应用虚力原理求体系的位移时,虚设力状态可在需求位移处添加相应的非单位力, 亦可求得该位移 。 ( )O 0403 图示桁架中,结点C 与结点D 的竖向位移相等 。 ( )O P P C D B A a a a B 题0403图 题0404图 0404 图示桁架各杆 EA = 常数,由于荷载 P 是反对称性质的,故结点 B 的竖向位移等于零。 ( )× 0405 图a 、b 所示两结构中,除A 处的支承情况不同和图b 中多一根链杆DB 外,其余情况相同,则两图中B 点的竖向位移是相等的。 ( )O q A B D q A B D ( )a ( )b C 10kN/m 3m 3m 2m 题0405图 题0406图 0406 图示结构各杆 EI = 常数 , 其 C 端的水平位移(→)为 : A. 225/( 4EI ) ; B. 225/( 8EI ) ; C. 0 ; D. 80/( EI ) 。 ( C ) 0407 求图示梁铰 C 左侧截面的转角时,其虚拟状态应取:( C ) C A.;;C B.C D.M C C.M M =1 =1 =1 题0407图 题0408图 0408 图示悬臂梁EI = 常数,截面C 、B 的相对转角为, ( B )
A. 3P 3F a EI ; B. 0 ; C. 3P 512F a EI ; D. 3 P 24F a EI 。 0409图示刚架 l a >>0 , B 点的水平位移是: A . 向右 ; B . 向左 ; C . 等于零; D . 不定, 方向取决于a 的大小 。 (A) C D +t 1 +t 2 题0409图 题0410图 0410 图示伸臂粱, 温度升高 t t 12> ,则C 点和D 点的位移: A . 都向下 ; B . 都向上; C . C 点向上, D 点向下;D . C 点向下, D 点向上。 ( D )