LabVIEW作业
指导老师:
院系:机械工程系
班级:
学号:
姓名:
2013年 11 月
1、创建一个二维LED灯。
在前面板打开控件选板,在银色中点数组,创建一个数组(银色),在银色中点布尔,创建一个LED(银色),将其拉到之前创建的数组(银色)框中,将其拉成二维数组,将其标签改为初始状态,整体复制粘贴,将其标签改为运行状态,右击将运行状态数组转换为显示控件如图1-1所示:
图1-1 LED灯前面板
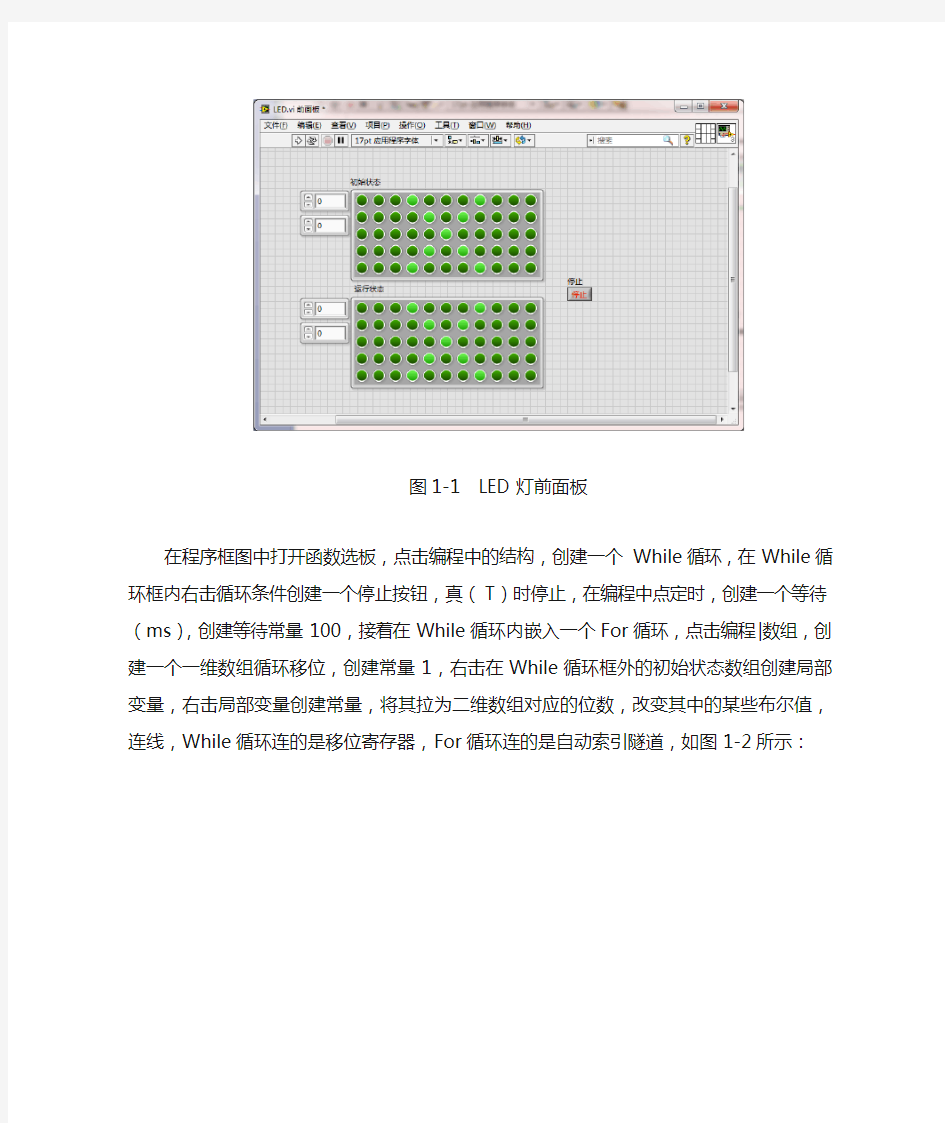
在程序框图中打开函数选板,点击编程中的结构,创建一个While循环,在While循环框内右击循环条件创建一个停止按钮,真(T)时停止,在编程中点定时,创建一个等待(ms),创建等待常量100,接着在While循环内嵌入一个For循环,点击编程|数组,创建一个一维数组循环移位,创建常量1,右击在While循环框外的初始状态数组创建局部变量,右击局部变量创建常量,将其拉为二维数组对应的位数,改变其中的某些布尔值,连线,While循环连的是移位寄存器,For循环连的是自动索引隧道,如图1-2所示:
图1-2 LED灯程序框图
2、分别用For循环和While循环求0~100内所有奇数的和。
2.1、For循环
在前面板打开控件选板,创建一个数值显示控件,将其标签改为0~100内奇数的和,如图2-1所示:
图2-1 For循环求0~100内奇数的和前面板
在程序框图中打开函数选板,点击编程中的结构,创建一个For循环,N为50,在编程|数值中,创建一个乘法、加法还有加1,移位寄存器的初始值为0,连线,如图2-2所示:
图2-2 For循环求0~100内奇数的和程序框图
2.2、While循环
在前面板打开控件选板,创建一个数值显示控件,将其标签改为0~100内奇数的和,如图2-3所示:
图2-3 While循环求0~100内奇数的和前面板
在程序框图中打开函数选板,点击编程中的结构,创建一个While循环,在编程|数值中,创建一个乘法、加法还有加1,移位寄存器的初始值为0,在编程|比较中,创建一个“大于等于?”,由于While循环先执行再比较,所以比较的数应该是最后一个奇数99,创建常量99,连线,如图2-4所示:
图2-4 While循环求0~100内奇数的和程序框图
学号 1607080221 天津城建大学 虚拟仪器大作业 微积分运算 学生姓名韩徐 专业名称电子信息科学与技术 计算机与信息工程学院 2019 年 5 月 16日
本学期我们开设了虚拟仪器选修课程,课上老师讲解了虚拟仪器的起源、发展、应用以及LabVIEW软件的使用。虚拟仪器是以计算机为核心的,是仪器系统与计算机软件技术的紧密结合。这种结合有两种方式,一种是将计算机装入仪器,就是所谓的智能仪器,随着计算机功能的日益增大以及体积的日益缩小,这类仪器的功能也越来越强大,目前已经出现嵌入式系统的仪器。另一种方式是将仪器装入计算机,以通用的计算机硬件以及操作系统为依托,实现各种仪器功能。虚拟仪器主要是指第二种方式。虚拟仪器通过软件将计算机硬件资源与仪器硬件有机地融合为一体,从而把计算机强大的计算功能和仪器硬件的测量、控制能力结合在一起,大大缩小了仪器硬件的成本和体积,并通过软件实现对数据的显示、储存及分析处理。LabVIEW是一个软件开发环境,它是一种不同于常规文本式编程语言的图形化编程工具,它被公认是标准的数据采集和仪器控制软件。熟练地掌握这个软件的使用可以为以后的工作提供很大的便利,为了熟悉这个软件的使用,巩固课上所学知识,我们尝试使用这个软件编写一个简单的程序,实现一些功能,我参考了相关的资料,使用LabVIEW编写了一个计算微积分的程序,在前面板界面输入信号(本程序以方波信号为主)的一些参数,然后程序就可以对指定的信号进行微分和积分的计算。
首先在我的电脑上安装LabVIEW软件,我使用的是2013版本的LabVIEW。安装完成以后,打开软件,新建一个vi,这时候会出现两个面板:前面板和程序框图面板,然后根据参考书的介绍进行编程,具体操作如下: 1、在前面板上拖放相应的控件,本程序需要波形图显示控件1个、数值输入控件5个、字符串输入控件1个、停止按钮1个。这些东西在查看-控件选板下找到。 2、拖放好这些控件以后在程序框图界面可以看到这些控件,在程序框图界面把这些控件摆放整齐,并添加一些新的函数控件,包括方波发生器1个、除法运算符1个、倒数运算符1个、数值常量1个、数组1个、捆绑簇1个、条件结构框1个、while循环结构1个、积分/微分运算符各1个。这些东西在查看-函数选板下找到。
运动控制的基础 概观本教程是在NI测量基础系列的一部分。每个在这个系列的教程,教你一个常用的测量应用的特定主题的解释理论概念,并提供实际的例子。在本教程中,学习运动控制系统的基础知识,包括软件,运动控制器,驱动器,电机,反馈装置,I / O。您还可以查看交互式演示,通过本教程的材料在自己的步伐。有关更多信息,返回到NI测量基础主页。目录运动控制系统的组成部分软件配置,原型设计,开发运动控制器移动类型电机放大器和驱动器汽车和机械要素反馈装置和运动的I / O NI相关产品运动控制系统的组成部分图1显示了一个运动控制系统的不同组件。图1。运动控制系统组件应用软件-您可以使用应用软件,以命令的目标位置和运动控制型材。运动控制器-运动控制系统的大脑作用到所需的目标位置和运动轨迹,并建立电机的轨迹遵循,但输出±10 V的伺服电机或步进和方向脉冲信号,步进电机。 放大器或放大器(也称为驱动器)驱动器-从控制器的命令和需要开车或关闭电机的电流产生。电机-电机机械能变成电能和生产所需的目标位置移动到所需的扭矩。机械部件-电机的设计提供一些力学的扭矩。这些措施包括线性滑轨,机械手臂,和特殊的驱动器。反馈装置或位置传
感器-位置反馈装置是不是需要一些运动控制应用(如步进电机控制),但重要的是为伺服电机。反馈装置,通常是一个正交编码器,感应电机的位置和结果报告控制器,从而结束循环的运动控制器。软件配置,原型设计,开发应用软件分为三大类:配置,原型和应用程序开发环境(ADE)。图2说明了运动控制系统的编程过程和相应的NI产品设计过程:图2。运动控制系统开发过程组态 做的第一件事情之一,是您的系统配置。为此,美国国家仪器公司提供测量与自动化浏览器(MAX),不仅运动控制,但所有其他NI硬件配置的交互式工具。对于运动控制,MAX 提供交互式的测试和调整面板,帮助您验证系统功能之前,你的程序。图3 NI MAX是一个交互式工具,用于配置和调整您的运动控制系统。 应用笔记 了解伺服调谐 使用1D互动的环境测试电机功能 轴运动控制器的配置 轴运动控制器设置 运动控制器的编码器设置 运动控制器的参考设置 数字运动控制器的I / O设置原型 当你配置你的系统,你可以开始原型和开发应用程序。在
《LabVIEW语言及编程技术》试题库 一、选择题: 1. 下面选项中,哪个是更新前面板显示控件的最好方法?[ B ] (A) 使用局部变量;(B) 直接连线到显示控件的接线端; (C) 使用功能全局变量;(D) 使用"值"属性节点。 2. 与局部变量相比,下面哪个描述表明了全局变量的优势?[ C ] (A) 全局变量自身不需要标签就可执行; (B) 全局变量遵循数据流模式,因此不会引起竞争情况; (C) 全局变量可以在两个独立的同时运行的VI之间传递数据; (D) 只有全局变量能传递数组数据,而局部变量不能。 3. 如存储的数据将被其他工程师通过Microsoft Excel分析。应使用哪种存储格式?[ B ] (A) TDM;(B) 用制表符(Tab)分隔的ASCII; (C) 数据记录;(D) 自定义二进制格式。 4. 创建一个数组的最高效方法是:[ A ] (A) 使用一个带自动索引的While循环; (B) 初始化一个数组并在While循环中替换其元素; (C) 在While循环中放置一个创建数组函数; (D) 使用一个带自动索引的For循环 5. 当连接输入被勾上时,下面程序框图中创建数组(Build Array)函数的输出是什么? [ C ] (A) 一维数组{1, 7, -4, -2, 3, 6};(B) 二维数组{{1, -4, 3, 0}, {7, -2, 6}};(C) 一维数组{1, -4, 3, 7, -2, 6};(D) 二维数组{{1, -4, 3}, {7, -2, 6}}。 6. 下面数组加法的计算结果是多少? [ B ]
(A) 一维数组{80, 20, 40, 10, -60};(B) 一维数组{120, 30}; (C) 一维数组{120, 30, -60};(D) 二维数组{{120, 90, 20}, {60, 30, -40}}。 7. 对于下面的程序框图,哪个描述是正确的?[ D ] (A) 循环会执行一次,计数接线端会输出数值0; (B) 循环不会执行,计数接线端会返回一个空数值(Null); (C) 循环会执行一次,计数接线端会输出数值1; (D) 循环会执行无限次,程序只能人为强制中止。 8. LabVIEW代码如何执行?[ C] A 代码顺序执行,依照图标在框图中放置的位置 B 代码从右到左,由上到下顺序执行。 C 代码以数据流的方式执行。 D 代码并行执行和顺序执行同时进行。 9. 下面的框图程序执行后,输出的波形图显示为下列哪个图形?[ B ] 程序框图
虚拟仪器大作业——模拟计算器 班级:电1004 姓名: 学号:20102389
一、设计思想: .创建3个字符串显示控件num1,num2,num3,其中: 1、第一个输入数据存储在num1中 2、第二个输入数据存入num2中 3、将其赋给 num3,并使num2为空,以便输入的数据存入num2 4、所有的运算是在num1和 num3间进行 5、运算结果都赋给result,同时赋给num1,用于下一次的运算 .创建4个布尔开关按钮change,change1,change2,change3,其中: 1、Change的真假用来判断是第一个数据还是第二个数据 2、change1的功能是在输入=,运算完后,不需要初始化即可进行下一次运算 3、change2用来去掉数据小数末尾的0 4、change3用来保证backspace键仅对输入的数据有效,对运算结果无效 .创建2个数值显示控件type1,type2,并分别在其后面板的属性——数据类型——表示法中选择U8其中: 1、type1用来存储运算符号 2、type2用来保证连续“+、-、*、/”的正确性 3、所有的运算结果都赋给result 4、result经过去零处理后得到result1,将数据显示在前面板上。 二、实现过程 1、面板按键的设计及感应 首先,在前面板上建立一个簇 然后在簇中再建立布尔量,复制20个以满足键的需求(0--9十个数字键,一个小数点键,一个等号键,四则运算键,一个开方键,一个平方键,一个倒数键,一个反号键,一个清零键及一个退出键并注意按键的顺序)。 将按键给值并作适当的美化处理
在后面板中通过将簇中元素按产生的顺序组成一个一维数组,这样就实现了每个键与数字(0--20)之间的对应。每次按下一个键时,通过 查找出对应的键并把结果(对应的数字)连接到一个case结构,然后执行对应case结构中的程序,至此就完成了对一个键的感应过程。 2、数字的键入(0~8键入1~9数字) 由于第一个输入和第二个输入所存放的地方不同(第一个存于num1,第二个存于num2→mun3再清空num2),所以有必要对此分开处理。创建2分支(真、假)的case结构。 用change控制分支的选择:在处创建局部变量并转换为读入。由于数字的键入是数据输入,change3用来保证backspace键仅对输入的数据有
检测技术与仪表实验 课程设计 题 目 基于labview 的智能家居控制设计 姓 名 徐鑫涛 黄敏瑶 学 号 3100404112 3100404129 专业班级 10电气工程及自动化2班 任课教师 李园/钟伟红 分 院 信息科学与工程学院 完成日期 2012年12月20日 宁波理工学院
摘要 随着嵌入式技术的发展和高速宽带网络的普及, 利用网络实现远程监控已为人们广泛接受,嵌入式网络监控技术正是在此条件下逐步发展成熟起来的. 用户使用Web 浏览器,通过以太网远程访问内置Web 服务器的监控摄像机, 不但可以实现对现场的远程视频监控, 而且可以向监控现场发送指令. 在整个系统的实现过程中, 嵌入式Web 服务器起着十分重要的作用,实现智能化离不开运算和控制单元。 本文中,我们探讨实现室内外温度,湿度,光照强度的智能控制采用虚拟仪器技术,数据采集并测得电气物理量,如电压、电流、温度等,基于数据采集以及labview仿真,通过软硬件与计算机的结合,实现了测量的自动化并提供可分析数据,对于温度程序的核心思想,其实就是利用这个系统能够根据温度的变化做出相应的处理,比如说外部温度比设定的温度高那么我就需要让制冷设备发挥作用来降低温度,设置相关反馈环节,基于LabView的温度控制系统,主要讲述控制系统软件方面的设计,首先对温度传感器采集到的温度信号(转化并处理为电压信号)输入到采集卡模拟输入端口,采集卡将信号送入LabView程序处理后从模拟输出端输出相关有效的PWM调制波形,实现了测量的自动化并提供可分析数据,实现使室内的温度、湿度、光照度等保持一个基本平衡的状态的智能化系统。 Internet向普通家庭生活不断扩展,消费电子、计算机、通讯一体化趋势日趋明显,现代智能家居由于其安全、方便、高效、快捷、智能化等特点在21 世纪将成为现代社会和家庭的新时尚。当家庭智能网关将家庭中各种各样的家电通过家庭总线技术连接在一起时,就构成了功能强大、高度智能化的现代智能家居系统。而基于嵌入式系统的家庭智能系统在国内才刚刚出现,随着嵌入式技术更加广泛的应用,随着成本的逐步降低,中国的智能家居最终将走向嵌入式。 关键词:温度反馈嵌入式系统 labview 数据采集
LabVIEW技术大作业 题目:基于LabVIEW的巴特沃斯窗函数滤波器的设计学院:信息与通信工程学院 专业:通信工程 班级:通信081班 学号:2008026121 姓名:王美玲
一、 虚拟仪器及LabVIEW 的相关介绍 虚拟仪器(virtual instrument )是基于计算机的仪器。计算机与仪器的密切结合是目前仪器发展的一个重要方向。这种结合有两种方式,一种方式是将计算机装入仪器,典型的例子就是所谓智能化的仪器。随着计算机功能日益强大以及体积的日益减小,这类仪器的功能也越来越强大,目前已经出现含有嵌入式系统的的仪器。另一种方式是将仪器装入计算机,以通用计算机硬件及操作系统为依托,实现各种仪器的功能。虚拟仪 主要是这种方式。常见的虚拟仪器组建方案: 二、虚拟仪器的特点 (1)尽可能采用通用的硬件,各种仪器的差异主要是软件。 (2)可以充分发挥计算机的能力,有强大的数据处理功能,可以创造出强大的仪器。 (3)用户可以根据自己的需要定义和制造各种仪器。 虚拟仪器实际上是一个按照仪器需求组织的数据采集系统,其研究中涉及的基础理论主要是数据采集和数字信号处理。在这领域中使用比较广泛的计算机语言和开发环境就是美国NI 公司的LabVIEW 。 三、LabVIEW 的简介 LabVIEW (laboratory virtual instruments engineering workbench )是一种图形化的编程语言环境,它广泛的被工业界、学术界和研究实验室所接受,被公认是标准的数据采集和仪器控制软件。LabVIEW 不仅提供了与遵从GPIB ,VXI ,RS-232和RS-485协议的硬件及数据采集卡通信的全部功能,还内置了支持TCP/IP ,ActiveX 等软件标准的数据库函数,而且其图形化的编程界面使编程变得生动有趣。LabVIEW 是一个功能强大且灵活的软件。 以LabVIEW 为代表的图形化语言程序,又称为“G ”语言。使用这种语言编程时,基本上不需要编写程序代码,而是“绘制”程序流程图。LabVIEW 尽可能利用工程技术人员所熟悉的术语、图标和概念,因而它是一种面向最终客户的开发工具,可以增强工程人员构建自己的科学和工程系统的能力,可以实现仪器编程和数据采集系统提供便捷途径。 利用LabVIEW ,可以产生独立运行的可执行文件。LabVIEW 的真正的32位编译器,像其他软件一样,LabVIEW 提供了Windows 、UNIX 、Linux 和Macintosh 等多种版本。 四、基于LabVIEW 的巴特沃斯传函数滤波器的设计的系统原理介绍 数字信号处理现在已经发展到各个领域都需要的程度,医学、军事、以及工业设计等方面都应用很广泛。在数字信号处理的理论基础上最重要的是滤波的功能。滤波器的种类有许多,根据幅频特性分为低通滤波、高通率波、带通滤波和带阻滤波根据信号不同可以分为数字滤波器和模拟滤波器。根据种类不同,有巴特沃斯滤波器、切比雪夫滤波器、模拟滤波器和巴塞尔滤波器等。滤波器设计的理论和设计方法已经相当发展的相当成熟,而且有多种典型的模拟滤波器供我们选择,根据自己掌握的知识本次试验采用的是巴特沃斯滤波器,可以实现高通、低通、带通和带阻的滤波的功能。选择巴特沃斯被 测 对 象 信号调理 数据采集 卡 数据处理 虚拟仪器面板
基于LabVIEW的控制系统仿真 摘要 在控制理论教学和实验中,存在着设备短缺、教学手段单一等问题,采用虚拟控制系统实验方式可有效地解决这些问题。本文对控制系统仿真的意义与研究现状作了介绍,提出并确定了基于LabVIEW的控制系统仿真的实施方案。应用NI公司的LabVIEW 2009、控制设计工具包作为软件开发工具,实现了控制系统的建模、分析与设计这一系列过程的计算机仿真。经过编写程序和发布应用程序,最终开发出了一种交互式实验教学系统。该系统包含信号发生器、典型环节、质点-弹簧-阻尼器系统和一级倒立摆系统四个子模块,用户可进行控制系统建模、性能分析、PID设计、LQR设计等方面的研究。各个子模块运行良好,整个系统具有操作简单、界面友好和实时交互的特点;对于教学和实验的改革和创新具有一定的指导意义。 文中详细介绍了该实验教学系统的设计思路与设计过程。主体部分是对系统各个子模块的理论分析、相应的算法分析和虚拟仪器程序的编写,此外还涉及程序的动态调用和发布应用程序等内容。 关键词:控制系统;仿真;LabVIEW;倒立摆;实时交互
Simulation of Control System Based on LabVIEW Abstract In the teaching and experimental process of control theory, there exist problems such as equipment shortages, monotonous teaching methods and etc. We can use Virtual Instrument to solve these problems effectively. This paper introduces the significance and research status of the control system simulation, puts forward and determines the implement scheme of the Control System Simulation Based on LabVIEW. Use NI's products (LabVIEW 2009, Control Design Toolkit) as software development tools to realize computer simulation of the control system modeling, analysis and design process. After writing programs and publishing applications, we can achieve an interactive experimental and teaching system. The system consists of four sub-modules: signal generator, typical elements, the mass-spring-damper system and the single inverted pendulum system. Users can do research in control system modeling, performance analysis, PID design, LQR design and other aspects. Each sub-module of the system runs well, the whole system has the features as follows: simple, friendly interface and real-time interactive. It will provide the teaching and experiment field with reform and innovation. This paper describes the thinking and design process of the system in details. Theoretical analysis and algorithm analysis for the sub-module and Virtual Instrument programs writing are the main parts. It also discusses the dynamic program invocation and publishing applications and so on. Keywords:Control System; Simulation; LabVIEW; Inverted Pendulum; Real-Time Interaction
LABVIEW回声探测器实验作业 安 徽 工 业 大 学 电气信息学院 自动化093
回声探测器 LabVIEW是由美国国家仪器公司创立的功能强大而又灵活的仪
器和分析软件应用开发工具。它是一种基于图形化的、用图标来代替文本行创建应用程序的计算机语言。在以PC为基础的测量和工控软件中,LabVIEW的市场普及率仅此次于C++/C语言。LabVIEW已经广泛地被工业界、学术界和研究实验室所接受,被公认为是标准的数据采集和仪器控制软件,LabVIEW使用的编程语言是G语言。G语言用图表表示函数,用连线表示数据流向。这次编程所用的是较新版本的LabVIEW 8.5。 一.设计目的:该实验基于labview8.5虚拟平台,使用图形语言编程,由回声发生器子VI产生回声信号,通过回声探测器进行探测分析。本实例利用两个波形图来分别显示回声信号和回声探测信号,并对这两个信号进行比对分析。 本实验设计主要内容包括三个部分:回声产生部分,回声探测部分,和结果显示部分。 回声探测器实例的前面板如图1:
图1 1.程序框图主要功能模块介绍:如图2回声探测器实例的程序框图 主要有四个功能模块组成,分别为回声产生子Vi功能模块,回声探测功能模块,结果显示功能模块,While循环功能模块,下面对每个功能块实现的具体处理功能和任务进行详细介绍。 图2 1>.回声产生子VI功能模块 回声产生子VI功能模块用来产生回声信号,此子VI命名为 回声产生器.vi, 图3给出了回声 产生子VI功能图
回声信号 图3 该子Vi主要用来产生回声信号,可将该模块产生的信号输入相应的波形图和回声探测功能模块中。另外,该子VI可以通过改变输入控件的参数来产生不同的信号。 2>.回声探测功能模块 回声探测功能模块的功能是通过“快速希尔伯特变换”,“实部虚部至极坐标转换”和“自然对数”等一系列函数节点的运算,将回声产生子VI功能模块产生的回声信号信息特征探测出来,“快速希尔伯特变换”函数变换是在FFT函数进行傅立叶变换的基础上执行离散希尔伯特变换的。其调用路径是“函数——信号处理——变换——快速希尔伯特变换”。 “实部虚部至极坐标转换”函数是将一复数坐标的直角坐标形式转换成极坐标形式,本例利用该函数将两个直角坐标系的数组转换为极坐标形式,其调用路径是“函数——编程——数值——复数——实部虚部至极坐标转换”。 “自然对数”函数是计算输入数值的自然对数值,其调用路径是
基于A VR单片机和LabVIEW的丝杆步进电机运动控制系统 A VR单片机为核心的嵌入式系统,配备专用步进电机驱动器实现对丝杆步进电机运动的控制工作,LabVIEW软件构建虚拟仪器系统并创建友好交互界面。单片机和LabVIEW之间确定串口通信规则,使LabVIEW能够发送相应字符串到单片机从而实现对丝杆步进电机启停、运动方向、运动步数的直接控制,并能够读取电机相关运动状态。文章设计的丝杆电机运动控制系统具有工作稳定,易于操作和可移植性强的特点。 标签:单片机;LabVIEW;步进电机;串口通信 1 概述 丝杆步进电机,又称线性步进电机,由于其特殊的机械机构和工作机理,在日常实验研究及工业生产等相关领域发挥着越来越大的作用。随着技术的不断发展创新,对于丝杆步进电机运动的控制方法已经不仅仅只限于单种技术的使用,而是多技术混合,结合各自的独特优势来实现最优化的系统设计。本系统以A VR 单片机为核心搭建硬件工作电路,LabVIEW软件创建虚拟仪器系统,解决了步进电机工作噪声较大,控制操作不便等问题。 2 系统组成 系统主要由装有LabVIEW软件的计算机,A VR单片机、电机驱动器和丝杆步进电机组成,系统组成框图如图1所示。 其中本系统中选用美国国家仪器(NI)公司研制开发的2014版LabVIEW 软件,LabVIEW是一种图形化的编程语言的开发环境,可以方便地建立自己的虚拟仪器,利用其编写的上位机程序控制下位机;下位机选用ATMEL公司中8位系列单片机的ATmega128系列单片机,该款单片机稳定性极高,功耗也很低,单片机与计算机之间通过USB线连接;电机驱动器选用TB6600型号的两相式步进电机驱动器,可实现正反转控制,通过3位拨码开关选择7档细分控制,3位拨码快关选择8档电流控制,能达到低振动、小噪声、高速度的效果;丝杆步进电机选用机身长度40mm,相电流1.7A,保持转矩43N·cm,导程8mm的42丝杆步进电机。 3 系统功能实现 本系统是一种丝杆步进电机运动控制系统,最终可通过LabVIEW直接发送控制丝杆步进电机启停、运动方向以及运动步数的命令,并能读取电机相关运动状态。要完成上述功能需要单片机硬件控制电机、单片机与LabVIEW串口通信和LabVIEW状态机三个基本功能的实现。 3.1 单片机硬件控制电机
基于LabVIEW的几种简单测量与控制系统 李鹏雄徐熙炜 指导老师:俞熹 (复旦大学物理系上海 200433) 摘要:本文介绍了虚拟仪器的概念,LabVIEW的概念、来源、特点以及应用,着重讨论了几种简化的实用测量与控制系统。对红绿灯系统提出改进,使其更接近于生活中的实际情况。最后有对本实验的理解。 关键词:虚拟仪器 LabVIEW 计算机实测与控制温度计光强红绿灯 一.引言 虚拟仪器(Virtual Instruments)指的是用计算机软件将计算机硬件与仪器硬件结合在一起,利用计算机强大的计算以及模拟能力和仪器设备实现控制和测量的目的的工具。区别于传统的仪器,虚拟仪器没有一套固定的设备、固定的外观和功能等,其很大一部分功能是依赖于计算机来实现的。所以虚拟仪器往往能缩小体积,减少硬件成本。 LabVIEW是实验室虚拟仪器集成环境(Laboratory Virtual Instrument Engineering Workbench)的简称,是美国国家仪器公司(NATIONAL INSTRUMENTS,简称NI)的创新软件产品。其功能是用编程的方法创建虚拟仪器,但是和传统的编程不同的是,它使用的是图形化的程序语言,称为“G”语言,编写的程序后缀为.VI。使用这种语言编程时,基本上不写程序代码,取而代之的是图标和流程图。它尽可能利用了技术人员、科学家、工程师所熟悉的术语、图标和概念,因此,LabVIEW是一个面向最终用户的工具。LabVIEW集成了与满足GPIB、VXI、RS-232 和RS-485协议的硬件及数据采集卡通讯的全部功能。它还内置了便于应用TCP/IP、ActiveX等软件标准的库函数。这是一个功能强大且灵活的软件。使用它进行原理研究、设计、测试并实现仪器系统时,可以大大提高工作效率。它广泛地被工业界、学术界和研究实验室所接受,视为一个标准的数据采集和仪器控制软件。它也是目前应用最广、发展最快、功能最强的图形化软件集成开发环境。 二.LabVIEW下的几种简单测量与控制系统 使用LabVIEW开发平台编制的程序称为虚拟仪器程序,简称为VI。VI包括三个部分:程序前面板、框图程序和图标/连接器。程序前面板用于设置输入数值和观察输出量,用于模拟真实仪表的前面板。而每一个程序前面板都对应着一段框图程序。框图程序用LabVIEW图形编程语言编写,可以把它理解成传统程序的源代码。图标/连接器是子VI被其它VI调用的接口。 1.温度计 温度计程序是一个典型的测量用虚拟仪器。 图1就是温度计程序的前面板,可以看到上面有酒精温度计的图案,数字显示,还有两个显示电压和温度的框,以及一个停止按钮。
虚拟仪器试卷(满分100分) 一、填空题。(本题共10小题,15个填空,每空1分,共15分。) 1、一个完整的VI包括三个部分:( )。 2、LabVIEW有四种类型的节点:()、()、结构和代码接口。 3、因为For循环的常用来处理数组,所以数据出口的自动索引默认为()。 4、而While循环的数据出口的自动索引默认为()。 5、使用两个For循环,把其中一个嵌套在另一个中可以生成一个二维数组。外层的For循环产生()元素,而内层的For循环产生()。 6、利用()可以方便地从复杂的待测信号中分离出某一特定频率的信号。采样间隔是指()。 7、虚拟仪器最核心的思想是(),从而降低系统成本,增强系统功能与灵活性。8、如果没有现成的数据采集卡,我们也可以利用LabVIEW中的 ()功能实现数据采集。 9、Sequence结构有()两种方式。 10、框图程序是由()、()和()组成的可执行代码。 二、单项选择题。(本题共5小题,每个小题有四个选项,从中选出正确的选项,每小题2分,共10分。) 1、当一个函数的error in带有错误信息时,下列哪种说法是正确的。() A、该函数会对错误信息进行处理 B、该函数不会作任何操作,而是直接将错误信息传递给error out,且不会将自身函数发生的错误加进去。 C、该函数将会发出错误信息警告,且使程序终止运行。 D、该函数会直接将错误信息传递给error out。且会将自身函数发生的错误也一并加进去。 2、下列哪种说法是错误的?() A、虚拟仪器采用的是面向对象和可视化编程技术。 B、在程序运行的过程中波形的可见性是不可以改变的。 C、在LabVIEW中,VI程序的运行是数据流驱动的。 D、在创建子程序时,可以使用连线工具给前面板的控制器和指示器分配端口。 3、下列说法中哪种说法是正确的?() A、While循环只有在条件端口接收到的值为True时才停止循环 B、While循环不满足条件,1次也不执行 C、For循环当N<1时,1次都不执行 D、For循环可以嵌套,而While循环不可以嵌套 4、当数据采集卡组态成DIFF模式时,将使用差分连接方式,使用这种连接方式下列哪种说法是错误的?() A、可以减少尖峰噪声 B、增加噪声抑制 C、增大了尖峰噪声 D、增加共模信号抑制 5、下列哪种总线产品对PCI总线产品完全兼容。() A、PXI总 线 B、GPIB 总线 C、VXI总 线 D、 RS-232串口总线 三、简答题。(本题共三个小题,每个小题5分,共15分。)
大作业备选题目 1、成绩统计:自动产生3门课程的30个学生的成绩,分别统计不及格,60~69,70~79,80~89,90~100的学生人数,及平均分,以文本形式显示各门课程的考试情况。最后以文本或EXEL文件形式存盘保存。(较易) 2、①产生20个周期的振幅可变(振幅范围为0~10)的正弦信号在波形图表中显示出来,并存入二进制文件中。要求每次运行波形图表重新显示。 ②从刚存入的二进制文件中将数据读取出来并在波形图中显示出来,统计振幅绝对值为0~4、4~8、8~10的正弦信号出现的次数。 (本题自己编写峰值检测算法的得分会较高) 3、设计虚拟水、电、煤气计量系统,假设三个卡上各已存现金100元。要求(以水表为例):按键按下开始计量用水量和用水时间,按键断开,显示用水量和金额及剩余金额,当剩余金额不足5元时显示报警闪烁。并以文本形式存储用水记录。1000个脉冲为1吨,每吨1元钱。100个脉冲1度电,0.52元,煤气200个脉冲1升,1.6元/升。 4、设计虚拟加油站,开关按下开始计量,并实时显示流量,开关断开后显示总流量和金额;显示当前库存,当库存小于100升时库存显示报警闪烁。设计90#、93#、0#和柴油四个加油机。脉冲当量设定为300(假设每300个脉冲为1升),各种油品单价按时价计算,假设各油品库存都以10000升开始 5、设计虚拟上课打铃系统,上课时间50分钟,课间10分钟,大课间20分钟。上课与下课铃用不同的指示灯表示,响铃40秒;每天按10节课打铃(五一之后下午从2:30分开始,但9-10节课的上课时间不变)。其它时间前面板显示当前时间(年月日时分秒和星期)。 6、设计一个虚拟计算器,无计算时显示时间,计算器最少具备加、减、乘、除、平方、开方等功能。 7、设计一个十进制和二进制相互转换的计算器(包括小数部分的转换) 8、设计一个十进制和十六进制相互转换的计算器(包括小数部分的转换) 9、设计一个十六进制和二进制相互转换的计算器(包括小数部分的转换) 10、产生一个含若干个周期的幅值为1正弦波形,要求每隔10个点产生一个幅值为±1的毛刺(毛刺的正负为随机出现),分别编写含7个数据的滑动滤波算
成绩评定表
课程设计任务书
目录 1 目的及基本要求 (1) 2 基本原理 (1) 2.1程序原理 (1) 2.2设计步骤 (1) 3 电梯控制设计和仿真 (2) 3.1 总体程序设计 (2) 3.2 控件描述 (3) 3.3 子程序设计 (4) 4 结果及性能分析 (6) 4.1 运行结果 (6) 4.2 性能分析 (7) 参考文献 (7)
1 目的及基本要求 熟悉LabVIEW开发环境,掌握基于LabVIEW的虚拟仪器原理、设计方法和实现技巧,运用专业课程中的基本理论和实践知识,采用LabVIEW开发工具,实现国际象棋设计和仿真。 基本要求: 本程序是参照日常电梯使用规则而设计的,实现的功能是:程序运行后,可以选择要去的层数一层或者多层,电梯会从低到高的依次在已选择的层数停下来,然后在继续到下一个被选中的层数停下,当都已选楼层停下后,按钮会灭掉,回到一层,等待下一次的楼层选择。本程序基于电梯的特点利用LabVIEW制作的一款简单的电梯控制程序。 2 基本原理 2.1程序原理 设计上可大致分为以下几个部分: 1)主面板部分即电梯主界面的设置 2)控件部分即按钮的设置 3)控制部分就是通过操作按键来控制电梯移动 4)逻辑部分进行判断电梯走动没有,是否运行,同时布尔灯的亮灭 5)显示部分就是将电梯所到层数显示出来 运行原理: 程序运行后,首先规定电梯停在大楼的一层,然后根据右边所点亮的布尔控件上显示的数字层数,电梯经过时间的判断开始运行,向上或者向下移动,到达所选的楼层后,电梯停止,布尔灯灭掉,继续向下一个所选的楼层移动,直到所有的所选楼层全部停完后,
——鸳小白 1.一个温度监测器,如右图所示,当温度超过报警上限,而且开启报警时,报警灯点亮。温度值可以由随机数发生器产生.当报警发生时输出报警信息,例如“温度超限!当前温度78.23℃”,正常情况下输出空字符串。同时。利用“报警信息”控件的blinking属性,实现在输出报警信息的同时伴随闪烁,如下图所示。为了能看到闪烁效果,需要将采样间隔设到5秒以上。 (1)
(3)
2.有一个测量程序,采集两路信号,每1s采集一次,要求每采集一次,就将采集结果写入文本文件尾部,即使重新运行程序,仍能保证数据添加到文件尾部,而不会覆盖原有数据。格式为a保留4位小数,b为整数,如右图所示。并在程 序中用文本显示。 程序前面板
程序框图 3.利用随机数发生器仿真两个采样信号。一个0到5V的采样信号,每200ms采一个点,共采集50个点,另一路电压信号的范围为5到10V,采样间隔是50ms,共采100个点。采样完成后,将两路采样信号显示在同一个Waveform Graph中。
4.利用随机数发生器仿真两个采样信号。一个0到5V的采样信号,每200ms采一个点,共采集50个点, 另一路电压信号的范围为5到10V,采样间隔是50ms,共采100个点。采样完成后,将两路采样信号显示在同一个Waveform Graph中。X轴为时间轴显示,要求时间轴能真实的反映采样时间 5.创建一个VI程序,该程序可以产生一个六行四列的二维数组(数组元素为0到10的随机整数),并把二维数组的前三行、前三列单独提出来,做为一个新的数组。 子VI
主 VI 6.产生5个随机数,并和序号一起保存,格式为电子表单。
苏州大学机电工程学院 Soochow University of Mechanical and Electrical Engineering 课程设计报告 Curriculum design 课题名称:基于LabVIEW软件的PID自动控制学院: ********院 专业:********* 姓名:*** 学号:****
目录 一、PID控制原理 (1) 1、PID控制介绍 (1) 2、PID控制规律 (1) 3、PID 控制的性能指标 (3) 4、PID 控制器参数整定的分类 (3) 5、PID相关控制 (5) 6、数字PID (7) 二、LabVIEW8.5软件 (9) 1、简介 (9) 2、特点 (10) 3、虚拟仪器 (11) 4、应用领域 (12) 三、前期练习题目与内容 (14) 四、设计内容与要求 (17) 1、设计内容 (17) 2、设计要求 (17) 五、设计方案 (18) 1、设计思路 (18) 2、程序框图设计 (20) 3、控制面板设计 (21) 六、最终设计结果及运行情况 (22) 1、程序框图 (22) 2、控制面板 (22)
七、课程设计心得 (25)
基于LabVIEW软件的PID自动控制 一、PID控制原理 1、PID 控制介绍 PID 控制是过程控制中广泛应用的一种控制,简单的说就是按偏差的比例(proportional)、积分(Integral)、微分(Derivative)进行的控制。当今,尽管各种高级控制在不断的完善,但目前在实际生产过程中应用最多的仍是常规PID 控制,其原因是: 1) 各种高级控制在应用上还不完善; 2) 大多数控制对象使用常规PID 控制即可以满足实际的需要; 3) 高级控制难以被企业技术人员掌握。 PID 控制器具有结构简单,参数易于调整等优点。在长期的工程实践中,人们对PID控制己经积累了丰富的经验。特别是在那些实际过程控制中,控制对象的精确数学模型难以建立,系统参数又经常发生变化,常采用PID 控制器,并根据经验进行在线整定。 以下将从PID 控制规律、PID 控制的性能指标及PID 控制参数整定三个方面对PID 控制做进一步的介绍。 2、PID 控制规律 PID(Proportional,Integral and Differential)控制器是一种基于“过去”,“现在”和“未来”信息估计的简单算法。
1.产生一个值为0.0~100.0之间的随机数,然后除以一个在程序前面板中输入的数。当输 入的数值为零时,前面板上放置的指示灯点亮,提示除法无效。 2.生成10~20之间的随机数,并将由每次生成的随机数的曲线显示在波形图表中。 3. 输入三角形的三边长,求三角形的面积 4. 分别利用For循环的移位寄存功能和反馈节点两种方法求0+5+10+15+…+45+50的值(等差数列的和)
当按钮被松开时,显示“按钮被松开”。 6. 设计一评分程序,输入不同的分数会得到不同的评论。分数小于60,“警告”指示灯会亮起来,同时显示字符串“你没有通过考试!”;分数在60~99之间,“通过”指示灯会亮起来,同时显示字符串“你考试通过了!”;分数为100,“恭喜”指示灯会亮起来,同时显示字符 串“你是第一名!”;如果输入为0~100以外的数字,会有错误提示,同时显示字符串“错误!”。
7. 建立一个实现计算器功能的VI。前面板有数字控制器用来输入两个数值,有数值指示器用来显示运算结果。运算方式有加、减、乘、除,可用一个滑动条实现运算方式的设定。 8. 用顺序结构实现数值匹配:输入1~100之间的任意1个整数,然后系统随机产生1~100之间的整数,直到和预先输入的整数一样,然后输出匹配的次数和时间。
9. 设计一个VI,用移位寄存器对连续产生的随机数进行100次累加,用累加值除以循环次数100,求这些随机数的平均数。再判断平均数是否在0.45~0.55范围内,如果在此范围内则点亮指示灯,并计算程序运行所耗的时间。提示:可以用“比较”子模板中的“判定范围并强制转换”函数判断数的范围。 10. 编写一个程序,测试自己在程序前面板上输入一段文字“LabVIEW是图形化的编程语言”所用的时间。 11. 建立一个VI,把包含10个随机数的一个数组的元素顺序颠倒过来,再将数组最后5个元素移到数组前端形成新的数组。
基于LabVIEW的控制系统仿真毕业设计 目录 1 绪论......................................................................................................................................... I 1.1 课题背景 ....................................................................................................................................... - 1 - 1.2 控制系统仿真的意义.................................................................................................................... - 1 - 1.3 控制系统仿真的研究现状............................................................................................................ - 2 - 1.4 本课题研究内容 ........................................................................................................................... - 2 - 2 LabVIEW概述 .................................................................................................................. - 4 - 2.1 虚拟仪器技术 ............................................................................................................................... - 4 - 2.2 控制设计工具包 ........................................................................................................................... - 5 - 3 系统方案的选定............................................................................................................... - 7 - 3.1 系统概述 ....................................................................................................................................... - 7 - 3.2 系统方案的比较与选定................................................................................................................ - 7 - 3.3 系统子模块的规划........................................................................................................................ - 9 - 4 系统设计......................................................................................................................... - 10 - 4.1 信号发生器 ................................................................................................................................. - 10 - 4.1.1 确定方案 ............................................................................................................................. - 10 - 4.1.2 VI设计................................................................................................................................. - 10 - 4.2 典型环节 ..................................................................................................................................... - 13 - 4.2.1 建模及理论分析 ................................................................................................................. - 13 - 4.2.2 VI设计................................................................................................................................. - 14 - 4.3 质点-弹簧-阻尼器系统.......................................................................................................... - 18 - 4.3.1 建模与模型转换及其VI设计........................................................................................... - 18 - 4.3.2 模型分析及其VI设计....................................................................................................... - 21 - 4.3.3 PID设计及其VI设计......................................................................................................... - 25 - 4.4 一级倒立摆系统 ......................................................................................................................... - 29 - 4.4.1 建模与分析及其VI设计................................................................................................... - 30 - 4.4.2 LQR设计及其VI设计....................................................................................................... - 36 - 4.4.3 实时仿真及其VI设计....................................................................................................... - 41 - 4.5 动态调用VI的设计 ................................................................................................................... - 44 - 4.5.1 VI的动态调用..................................................................................................................... - 44 - 4.5.2 VI设计................................................................................................................................. - 45 -