单片机操作系统RTX51原理分析与移植
发布时间:2009-7-25 阅读次数:286 字体大小: 【小】【中】【大】
一.课题要求:
仔细分析单片机操作系统RTX51的原理,将其移植到单片机实验平台上,并要求编写一个简短的程序来验证其运行的正确性(比如,编写两个具有显示不一样内容的任务)。
二.RTX51原理
注释:由于英文原文会比较好,所以我没有翻译过来(不过也写了部分的翻译),直接提取出来一些英文,总结在一起。
1. 进程管理( Task Management )
1) 进程类型( Classes of Tasks )
RTX-51 recognizes two classes of tasks:
1. Fast tasks
n Contain especially short responses and interrupt disable times.
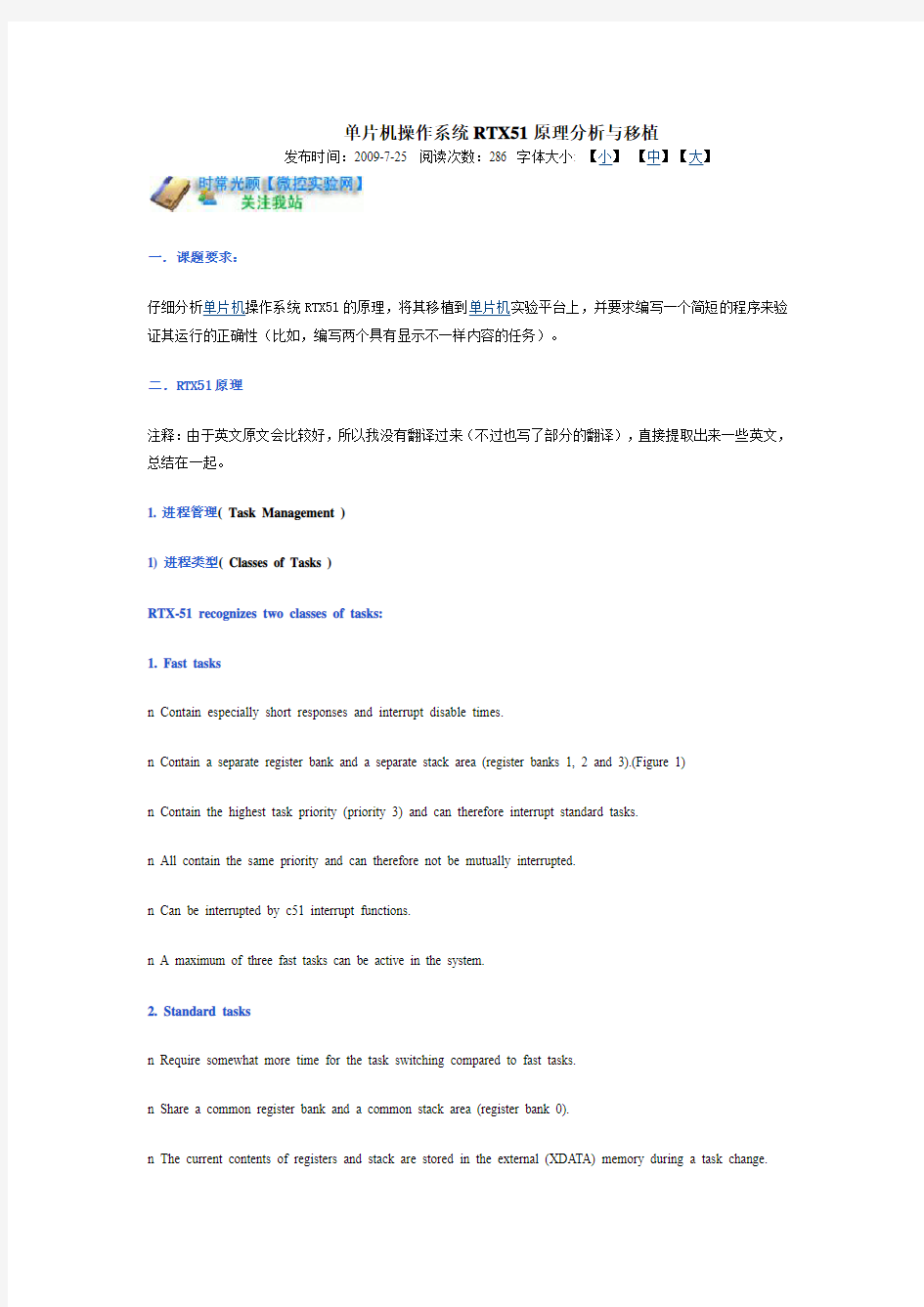
n Contain a separate register bank and a separate stack area (register banks 1, 2 and 3).(Figure 1)
n Contain the highest task priority (priority 3) and can therefore interrupt standard tasks.
n All contain the same priority and can therefore not be mutually interrupted.
n Can be interrupted by c51 interrupt functions.
n A maximum of three fast tasks can be active in the system.
2. Standard tasks
n Require somewhat more time for the task switching compared to fast tasks.
n Share a common register bank and a common stack area (register bank 0).
n The current contents of registers and stack are stored in the external (XDATA) memory during a task change.
n Can be interrupted by fast tasks.
n Can interrupt themselves mutually.
n Can be interrupt by c51 interrupt functions.
n A maximum 16 standard tasks can be active in the system.
<单片机操作系统RTX51原理分析>
Figure 3: Task Classes and Memory Allocation
每一个标准进程都包含一个设备上下文在扩展内存(XDATA)中。在标准进程执行进程切换的时候,会把它自己的Register和Stack存储到对应的设备上下文中(在扩展内存中的一个区域)。之后,Register和Statck 又从设备上下文中重新载入,继续执行。(交换技术)
相比而言,快速进程则不用这么麻烦,因为它们有各自独立的Register和Stack,所以只要激活对应的Register (修改PSW)和指向Stack的指针(Mov SP,#XX)即可。
2) 进程状态(Task states)
RTX-51 recognizes four task states:
1. READY All tasks which can run are READY. One of these tasks is the RUNNING (ACTIVE)task.
2. RUNNING (ACTIVE) Task which is currently being executed bythe processor. Only one task (maximum) can be in this state at a time.
3. BLOCKED (WAITING) Task waits for an event.
4. SLEEPING All tasks which were not started or which have terminated themselves are in this state.
3) 进程调度(Task switch)
The RTX-51 system section which the processors assigns to the individual tasks is referred to as the scheduler (also dispatcher).
The RTX_51 scheduler works according to the following rules:
1. The task with the highest priority of all tasks in the READY state is executed.
2. If several tasks of the same priority are in the READY state,the task that has been ready the longest will be the next to execute.
3. Task switchings are only executed if the first rule would have been otherwise violated (exception: round-robin scheduling).
Time-slice task change (round-robin scheduling) are executed if the following conditions are satisfied:
1. Round-robin scheduling must be enabled (see configuration).
2. The RUNNING task has the priority of 0 and is currently not executing a floating-point operation (see section "Floating-Point Operations", page 28).
3. At least one task with the priority zero must be in the READY state.
4. The last task change must have occurred after the selected system time interval (see system function
"os_set_slice"). The system time interval can be changed dynamically during program execution.
4) 进程通信和同步(Task Communication and Synchronisation)
There three two mechanisms:
1. Signal
Signals represent the simplest and fastest form of task communication. These can always be used when a pure task synchronisation is required without data exchange.
Each active task contains its own signal flag with which the following operations can be executed:
l Wait for a signal
l Send signal
l Clear signal
The task number (see section section "Task Declaration") of the receiver task is used for identifying the signals for the individual operations.
2. Message(via MailBoxes(FIFO))
n By means of the mailbox concept, messages can be exchanged free of conflicts between the individual tasks.
n RTX-51 provides a fixed number of eight mailboxes. Messages can be exchanged in words (2 bytes) via these mailboxes. In this case, a message can represent the actual data to be transferred or the identification of a data buffer(defined by the user). In comparison to the signals, mailboxes are not assigned a fixed task, but can be freely used by all tasks and interrupt functions. These are identified with a mailbox number.
Mailboxes allow the following operations:
l Send a message
l Read a message
Each mailbox is internally consists of three wait lists.(Figure 2)
Figure 2
1. Message list
List of the messages written in the mailbox. These comprise a maximum of eight messages.
2. Write wait list
Wait list for tasks which want to write a message in the message list of the mailbox (maximum 16 tasks).
3. Read wait list
Wait list for tasks which want to read a message from the message list of the mailbox (maximum 16 tasks).
3. Semaphore
n By means of the semaphore concept, resources can be shared free of conflicts between the individual tasks.
n A semaphore contains a token that your code acquires to continue execution. If the resource is already in use, the requesting task is blocked until the token is returned to the semaphore by its current owner.
n There are two types of semaphores: binary semaphores and counting semaphores. As its name implies, a binary semaphore can only take two values: zero or one (token is in or out). A counting semaphore, however, allows values between zero and 65535.
RTX-51 provides a fixed number of eight semaphores of the binary type.
Semaphores allow the following operations:
l Wait for token
l Return (send) token
2. 中断管理
RTX-51 performs task synchronisation for external events by means of the interrupt system.
Two types of interrupt processing are basically supported in this case:
1. 单片机c语言Interrupt Functions (Interrupt are processed by c51 interrupt funcions)
l Very sudden, periodically occurring interrupts without large coupling with the rest of the system (only infrequent communication with RTX-51 tasks, etc.).
l Very important interrupts which must be served immediately independent of the current system state.
2. Task Interrupts(Interrupt are processed by fast or standard tasks of RTX-51
l Fast Task Interrupts
Important or periodic interrupts which must heavily communicate with the rest of the system when they occur.
l Standard Task Interrupts
Only seldom occurring interrupts which must not be served immediately.
RTX-51 shows considerable different response times for fast and standard tasks.
u The INTERRUPT ENABLE registers of the 8051 are managed by RTX-51 and must not be directly manipulated by the user!
u The Interrupt Priority registers of the 8051 (not to be confused with the softwaretask priorities) are not influenced by RTX-51.
3. 动态内存管理
RTX-51 uses a simple and effective algorithm, which functions with memory blocks of a fixed size. All memory blocks of the same size are managed in a socalled memory pool. A maximum of 16 memory pools each a different block size can be defined. A maximum of 255 memory blocks can be managed in each pool.
n Generate Memory Pool
The application can generate a maximum of 16 memory pools with various block sizes. The application must provide an XDATA area for this purpose. The pool is stored and managed by RTX-51 in this area (see system function "os_create_pool").
n Request Memory Block from Pool
As soon as a pool has been generated, the application can request memory
blocks. The individual pools are identified by their block size in this case.
If an additional block is still free in the pool, RTX-51 supplies the start address
of this block to the application. If no block is free, a null pointer is returned (see
system function "os_get_block").
n Return Memory Block to Pool
If the application no longer needs a requested memory block, it can be returned
to the pool for additional use (see system function "os_free_block").
4. 时间管理
RTX-51 maintains an internal time counter, which measures the relative time passed since system start. The physical source of this time base is a hardware timer that generates an interrupt periodically. The time passed between these interrupts is called a system time slice or a system tick.
This time base is used to support time dependent services, such as pause or timeout on a task wait.
Three time-related functions are supported:
n Set system time slice
The period between the interrupts of the system timer sets the "granularity" of the time base. The length of this period, also called a time slice, can be set by the application in a wide range (see system function "os_set_slice").
n Delay a task
A task may be delayed for a selectable number of time slices. Upon calling this system function the task will be blocked (sleep) until the specified number of system ticks has passed (see system function "os_wait").
n Cyclic task activation
For many real-time applications it is a requirement to do something on a regular basis. A periodic task activation can be achieved by the RTX interval wait function (see system function "os_wait"). The amount of time spent between two execution periods of the same task is controlled, using os_wait, and is measured in number of system ticks and may be set by the application.
5. RTX(FULL)函数纵览(Functions Overview)
Initialize and Start the System:
os_start_system (task_number)
Task Management:
os_create_task (task_number)
os_delete_task (task_number)
os_ running_task_id ()
Interrupt Management:
os_attach_interrupt (interrupt)
os_detach_interrupt (interrupt)
os_enable_isr (interrupt)
os_disable_isr (interrupt)
os_wait (event_selector, timeout, 0)
oi_set_int_masks (ien0, ien1, ien2)
oi_reset_int_masks (ien0, ien1, ien2)
Signal Functions:
os_send_signal (task_number)
os_wait (event_selector, timeout, 0)
os_clear_signal (task_number)
isr_send_signal (task_number)
Message Functions:
os_send_message (mailbox, message, timeout)
os_wait (event_selector, timeout, *message)
isr_send_message (mailbox, message)
isr_recv_message (mailbox, *message) Semaphore Functions:
os_send_token (semaphore)
os_wait (event_selector, timeout, 0)
Dynamic Memory Management:
os_create_pool (block_size, *memory, mem_size) os_get_block (block_size)
os_free_block (block_size, *block)
Functions with the System Clock:
os_set_slice (timeslice)
os_wait (event_selector, timeout, 0)
Debug Functions:
os_check_tasks (*table)
os_check_task (task_number, *table)
os_check_mailboxes (*table)
os_check_mailbox (mailbox, *table)
os_check_semaphores (*table)
os_check_semaphore (semaphore, *table)
os_check_pool (block_size, *table)
三.RTX51移植
本试验是用的RTX的Tiny版本。也就是说没有优先级之分,没有邮箱机制,没有动态内存的管理。移植它很简单,就是配置一下它带的配置文件,然后和写好的程序一起编译连接,连接的时候加一个rtxtny参数,意思是说当我连接的时候,我把RTXtiny的库文件连接上,也就等于是程序和操作系统编译在一起了。该配置文件能在安装目的rtxtiny2底下找到。文件名称为Conf_tny.A51,例如,在我的电脑中,路径为:D:\Keil\单片机c语言\RtxTiny2\SourceCode\ Conf_tny.A51。如下图所示:
由于试验箱里面的芯片是AT89C51,所以要配置Conf_tny.A51的RAMTOP EQU 07F,目的是说配置内部RAM为128字节。
四.源程序代码:
源程序代码如下,说明请看代码里面的注释。
/*
** RTX-51的移植
** 移植到AT89S52
** 此程序是循环花样显示LED灯
** 有三个显示样式,分别对应下面的三个进程
** 下面的算法中用到了“时间到空间”的转换,使得算法简化不少
** 此程序我已在最小系统板上试验通过。
*/
#include
#include
const unsigned char table[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80
,0x40,0x20,0x10,0x08,0x04,0x02,0x01,0xFF,0x00};
/*时间到空间的转换,如果table是:
const unsigned char table[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
则算法和代码会多出一倍来。table数组虽然增加了一倍,算法也随之减少了一半,好处当然不止在这里体现,下面的进程2也减少了一半*/
//进程0 左->右->左
void LED0 (void) _task_ 0
{
int i;
os_create_task(1);//创建进程1
os_create_task(2);//创建进程2
while(1)
{
for (i = 0; i < 15; i++)
{
P1 = table[i];
os_wait(K_TMO,30,0);//等待30*10000微妙= 0.3秒}
os_send_signal(1); //发送Signal信号,激活进程1 os_wait(K_SIG,0,0); //等待信号
}
}
//进程1 全亮->全灭->全亮
void LED1 (void) _task_ 1
{
int i;
while(1)
{
os_wait(K_SIG,0,0);
for (i = 0; i < 3; i++)
{
P1 = table[15]; //全亮
os_wait(K_TMO,30,0);
P1 = table[16]; //全灭
os_wait(K_TMO,30,0);
}
os_send_signal(2);
}
}
//进程2 两边->中间中间->两边
void LED2 (void) _task_ 2
{
int i;
while(1)
{
os_wait(K_SIG,0,0);
for (i = 0; i < 8; i++)
{
P1 = table[i] | table[i+7]; //由于table长度多一倍,省去了一个循环,而且算法也简化了。
os_wait(K_TMO,30,0);
}
os_send_signal(0);
}
}
五.总结:
本试验用的RTX 的Tiny 版本。许多比较高级的功能没有去实现。目的主要是理解RTX的原理,然后移植它到某个单片机上面,编写个小程序来测试一下。通过阅读RTX附带的英文文档,我对此操作系统有了深刻的认识,感到此操作系统有很多优点,也有很多不足的地方。比如支持的任务较少,不过由于是单片机,“承受”能力也有限,也能理解。总的来说,对于单片机来说是个不错的操作系统。
六.参考文档:
[1]《RTX-51 官方英文文档》(包括FULL版,和Tiny版)
[2]《Keil Software –Cx51 编译器用户手册》中文版
文档内容版权所有;代码开源,能复制应用
单片机操作系统RTX51原理分析与移植
单片机, 操作系统, 原理, 移植
分享到:新浪微博QQ空间开心网人人网
一.课题要求:
仔细分析单片机操作系统RTX51的原理,将其移植到单片机实验平台上,并要求编写一个简短的程序任务)。
二.RTX51原理
注释:由于英文原文会比较好,所以我没有翻译过来(不过也写了部分的翻译),直接提取出来一些1. 进程管理( Task Management )
1) 进程类型( Classes of Tasks )
RTX-51 recognizes two classes of tasks:
1. Fast tasks
n Contain especially short responses and interrupt disable times.
n Contain a separate register bank and a separate stack area (register banks 1, 2 and 3 n Contain the highest task priority (priority 3) and can therefore interrupt standard task
n All contain the same priority and can therefore not be mutually interrupted.
n Can be interrupted by c51 interrupt functions.
n A maximum of three fast tasks can be active in the system.
2. Standard tasks
n Require somewhat more time for the task switching compared to fast tasks.
n Share a common register bank and a common stack area (register bank 0).
n The current contents of registers and stack are stored in the external (XDATA) memo n Can be interrupted by fast tasks.
n Can interrupt themselves mutually.
n Can be interrupt by c51 interrupt functions.
n A maximum 16 standard tasks can be active in the system.
<单片机操作系统RTX51原理分析>
Figure 3: Task Classes and Memory Allocation
每一个标准进程都包含一个设备上下文在扩展内存(XDATA)中。在标准进程执行进程切换的时候,
扩展内存中的一个区域)。之后,Register和Statck又从设备上下文中重新载入,继续执行。(交
相比而言,快速进程则不用这么麻烦,因为它们有各自独立的Register和Stack,所以只要激活对应XX)即可。
2) 进程状态(Task states)
RTX-51 recognizes four task states:
1. READY All tasks which can run are READY. One of these tasks is the RUNNING (ACTI
2. RUNNING (ACTIVE) Task which is currently being executed by the processor. Only on
3. BLOCKED (WAITING) Task waits for an event.
4. SLEEPING All tasks which were not started or which have terminated themselves are 3) 进程调度(Task switch)
The RTX-51 system section which the processors assigns to the individual tasks is refer The RTX_51 scheduler works according to the following rules:
1. The task with the highest priority of all tasks in the READY state is executed.
2. If several tasks of the same priority are in the READY state , the task that has been
3. Task switchings are only executed if the first rule would have been otherwise violate
Time-slice task change (round-robin scheduling) are executed if the following condition
1. Round-robin scheduling must be enabled (see configuration).
2. The RUNNING task has the priority of 0 and is currently not executing a floating-poin 28).
3. At least one task with the priority zero must be in the READY state.
4. The last task change must have occurred after the selected system time interval (see can be changed dynamically during program execution.
4) 进程通信和同步(Task Communication and Synchronisation)
There three two mechanisms:
1. Signal
Signals represent the simplest and fastest form of task communication. These can alwa without data exchange.
Each active task contains its own signal flag with which the following operations can be
l Wait for a signal
l Send signal
l Clear signal
The task number (see section section "Task Declaration") of the receiver task is used fo
2. Message(via MailBoxes(FIFO))
n By means of the mailbox concept, messages can be exchanged free of conflicts betwe
n RTX-51 provides a fixed number of eight mailboxes. Messages can be exchanged in wo can represent the actual data to be transferred or the identification of a data buffer(defi are not assigned a fixed task, but can be freely used by all tasks and interrupt function
Mailboxes allow the following operations:
l Send a message
l Read a message
Each mailbox is internally consists of three wait lists.(Figure 2)
点此在新窗口浏览图片
Figure 2
1. Message list
List of the messages written in the mailbox. These comprise a maximum of eight messa 2. Write wait list
Wait list for tasks which want to write a message in the message list of the mailbox (m
3. Read wait list
Wait list for tasks which want to read a message from the message list of the mailbox ( 3. Semaphore
n By means of the semaphore concept, resources can be shared free of conflicts betwee
n A semaphore contains a token that your code acquires to continue execution. If the res the token is returned to the semaphore by its current owner.
n There are two types of semaphores: binary semaphores and counting semaphores. A values: zero or one (token is in or out). A counting semaphore, however, allows values
RTX-51 provides a fixed number of eight semaphores of the binary type. Semaphores allow the following operations:
l Wait for token
l Return (send) token
2. 中断管理
RTX-51 performs task synchronisation for external events by means of the interrupt sy Two types of interrupt processing are basically supported in this case:
1. 单片机c语言Interrupt Functions (Interrupt are processed by c51 interrupt funcions)
2013年夏考操作系统原理离线作业 浙江大学远程教育学院 《操作系统原理》课程作业 第一次(第1、2章) 应用题 1.桌上有一个空盒,盒内只允许放一个水果。妈妈轮流向盒内放桔子和苹果,儿子专等吃盒中的桔子,女儿专等吃盒中的苹果。若盒内已有水果,放者必须等待,若盒内没有自己吃的水果,吃者必需等待。试在下述类PASCAL程序中虚线位置分别填上信号量、信号量初值和P、V操作实现三个进程正确的并发执行。 var (信号量)﹎﹎﹎﹎﹎﹎S , S1 , S2﹎﹎﹎﹎﹎﹎﹎﹎﹎﹎:semaphore:= (信号量初值) ﹎﹎﹎﹎﹎﹎1 , 0 , 0﹎﹎﹎﹎﹎﹎﹎﹎﹎﹎﹎﹎; begin parbegin 妈:begin repeat 準備 ﹎﹎P (S )﹎﹎ 向盒内放桔子 ﹎﹎V (S1 )﹎﹎﹎ 準備 ﹎﹎﹎﹎﹎﹎﹎﹎ 向盒内放苹果 ﹎﹎V (S2)﹎﹎ until false end 儿:begin repeat ﹎﹎﹎P (S1 )﹎﹎ 拿盒中的桔子 ﹎﹎﹎V (S)﹎﹎ 吃桔子 until false end 女:begin repeat ﹎﹎P (S2 )﹎﹎ 拿盒中的苹果
﹎﹎V (S)﹎﹎﹎ 吃苹果 until false 9 / 1 2013年夏考操作系统原理离线作业 end parend end 2.桌上有一个空盒,盒内只允许放一个水果。爸爸争向盒内放苹果,妈妈争向盒内放桔子。儿子等吃盒中的水果(苹果或桔子),若盒内已有水果,放者必须等待,若盒内没有水果,吃者必需等待。试在下述类PASCAL程序中虚线位置分别填上信号量、信号量初值和P、V操作实现三个进程正确的并发执行。 var (信号量)﹎﹎﹎﹎S1 , S2﹎﹎﹎﹎﹎﹎﹎﹎﹎:semaphore:= (信号量初值) ﹎﹎﹎﹎1 , 0﹎﹎﹎﹎﹎﹎﹎﹎﹎﹎﹎﹎﹎﹎﹎; begin parbegin 爸:begin repeat 準備 ﹎﹎P(S1)﹎﹎﹎﹎﹎﹎ 向盒内放苹果 ﹎﹎V (S2)﹎﹎﹎﹎﹎ until false end 妈: begin repeat 準備 ﹎﹎﹎P (S1 )﹎﹎﹎﹎﹎ 向盒内放桔子 ﹎﹎V (S2)﹎﹎﹎﹎ until false end 儿:begin repeat ﹎﹎﹎P (S2 )﹎﹎﹎ 拿盒中的水果(苹果或桔子) ﹎﹎﹎V (S1)﹎﹎﹎ 吃水果(苹果或桔子) until false end
课程成绩构成 笔试:70% 平时:30% 试卷构成: 名词解释五小题,共15分; 简答五小题,共35分; 综合题四小题,共50分。 第一章操作系统引论 1、设计现代操作系统的主要目标? 答:(1)有效性(2)方便性(3)可扩充性(4)开放性 2、操作系统的作用? 答:(1)作为用户与计算机硬件系统之间的接口 (2)作为计算机系统资源的管理者 (3)实现了对计算机资源的抽象 3、操作系统发展的主要动力? 答:(1)不断提高计算机资源的利用率 (2)方便用户 (3)器件的不断更新换代 (4)计算机体系结构的不断发展 4、为什么说操作系统实现了对计算机资源的抽象? 答:OS首先在裸机上覆盖一层I/O设备管理软件,实现了对计算机硬件操作的第一层次抽象;在第一层软件上再覆盖文件管理软件,实现了对硬件资源操作的第二层次抽象。OS 通过在计算机硬件上安装多层系统软件,增强了系统功能,隐藏了对硬件操作的细节,由它们共同实现了对计算机资源的抽象。 5、单道批理?多道程序设计?多道批处理? 单道批处理系统定义:把一批作业以脱机方式输入到磁带上,并在系统中配上监督程序(Monitor),在它的控制下使这批作业能一个接一个地连续处理,直至磁带(盘)上的所有作业全部完成,系统对作业的处理都是成批地进行的,且在内存中始终只保持一道作业。 多道批处理系统定义:由多道程序设计技术组成的系统。
6、分时系统产生主要动力?关键技术?特征? 答:(1)推动分时系统形成和发展的主要动力是更好地满足用户的需要。主要表现在:CPU 的分时使用缩短了作业的平均周转时间;人机交互能力使用户能直接控制自己的作业;主机的共享使多用户能同时使用同一台计算机,独立地处理自己的作业。 (2)关键技术:为实现分时系统,其中,最关键的问题是如何使用户能与自己的作业进行交互,即当用户在自己的终端上键入命令时,系统应能及时接收并及时处理该命令,再将结果返回给用户。此后,用户可继续键入下一条命令,此即人—机交互。应强调指出,即使有多个用户同时通过自己的键盘键入命令, (3)特征:多路性;独立性;及时性;交互性。 7、实时任务划分?实时系统与分时系统比较? 实时任务划分:(1)按任务执行时是否呈现周期性来划分 (2)根据对截止时间的要求来划分。 比较:(1)多路性。实时信息处理系统的多路性主要表现在系统周期性的对多路现场信息进行采集,以及对多个对象或多个执行机构进行控制。而分时系统的多路性则与用户情况有关,时多时少。 (2)独立性。实时信息处理系统的每个终端用户在向实时系统提出服务请求时是彼此独立操作,互不干扰。而分时控制系统中,对象的采集和对象的控制也是互不干扰。 (3)及时性。实时信息处理系统的及时性以人所能接受的等待时间来确定。分时系统的及时性是以控制对象所要求的开始截止时间或完成时间来确定的,一般为毫秒级。 (4)交互性。实时信息处理系统仅限于访问系统中某些特定的专用服务程序。分时系统能够向终端用户提供数据处理和资源共享等服务。 (5)可靠性。分时系统也要求可靠性,但实时系统要求更高度的可靠性。 8、操作系统定义?特征? 答:操作系统的定义:操作系统(operating system,简称OS)是计算机系统中的一个系统软件,它是这样一些程序模块的集合——它们管理和控制计算机系统中的软件和硬件资源,合理地组织计算机工作流程,以便有效地利用这些资源为用户提供一个功能强大、使用方便和可扩展的工作环境,从而在计算机与其用户之间起到接口的作用。 特征:(1)并发性(2)共享性(3)虚拟技术(4)异步性 9、是什么原因使操作系统具有异步性特征? 答:操作系统的异步性体现在三个方面:一是进程的异步性,进程以人们不可预知的速度向前推进,二是程序的不可再现性,即程序执行的结果有时是不确定的,三是程序执行时间的不可预知性,即每个程序
东北农业大学网络教育学院 操作系统及windows基础网上作业题 第一章操作系统引论 一、选择题 1.(D)不是基本的操作系统 A.批处理操作系统B.分时操作系统C.实时操作系统D.网络操作系统2.(C)不是分时系统的基本特征: A.同时性B.独立性C.实时性D.交互性 3.在计算机系统中,操作系统是( B) A. 一般应用软件 B.核心系统软件 C. 用户应用软件 D.系统支撑软件 4.以下哪一个不是设计操作系统的主要目标(C) A.方便性 B. 有效性 C. 成本低D. 可扩充性 5.最早出现的操作系统是( B) A.分时系统B.单道批处理系统C.多道批处理系统D.实时系统 6. 允许多个用户以交互使用计算机的操作系统是( B) A.分时系统B.单道批处理系统C.多道批处理系统D.实时系统 7. 操作系统是一组( C) A.文件管理程序B.中断处理程序C.资源管理程序D.设备管理程序 8. 现代操作系统的两个基本特征是( C)和资源共享. A.多道程序设计B.中断处理C.程序的并发执行D.实现分时与实时处理 9. ( D)不是操作系统关心的主要问题 A.管理计算机裸机B.设计,提供用户程序与计算机硬件系统的界面 C, 管理计算机系统资源D.高级程序设计语言的编译器 10.引入多道程序的目的是(D) A.为了充分利用主存储器B.增强系统的交互能力 B.提高实时响应速度D.充分利用CPU,减少CPU的等待时间 11.多道程序设计是指( A) A.有多个程序同时进入CPU运行 B.有多个程序同时进入主存并行运行 C.程序段执行不是顺序的 D.同一个程序可以对应多个不同的进程 12.从总体上说,采用多道程序设计技术可以( C)单位时间的算题量,但对每一个算题,从算题开始到全部完成所需的时间比单道执行所需的时间可能要( ). A.增加,减少B.增加,延长C.减少,延长D.减少,减少 13.在分时系统中,时间片一定,( B),响应时间越长。 A.内存越多B.用户数越多C.后备队列D.用户数越少
第一章习题及答案 一、填空题 1.用户与操作系统的接口有,两种。 【答案】命令接口,系统调用 【解析】按用户界面的观点,操作系统是用户与计算机之间的接口。用户通过操作系统提供的服务来有效地使用计算机。一般操作系统提供了两类接口为用户服务,一种是程序一级的接口,即通过一组广义指令(或称系统调用)供用户程序和其他系统程序调用;另一种是作业一级的接口,提供一组控制命令供用户去组织和控制自己的作业。 2.用户程序调用操作系统有关功能的途径是。 【答案】利用系统调用命令 【解析】系统调用命令是操作系统专门给编程人员提供的调用操作系统有关功能的途径,一般在汇编语言和C语言中都提供了使用系统调用命令的方法。编程人员可以在这些语言中利用系统调用命令动态请求和释放系统资源。 3.UNIX系统是①操作系统,DOS系统是②操作系统。 【答案】①分时(或多用户、多任务),②单用户(或单用户、单任务) 【解析】 UNIX系统是一个可供多个用户同时操作的会话式的分时操作系统,DOS系统是为个人计算机设计的一个单用户操作系统。 4.现代计算机中,CPU工作方式有目态和管态两种。目态是指运行①程序,管态是指运行②程序。执行编译程序时,CPU处于③。 【答案】①用户,②操作系统,③目态 【解析】 CPU工作方式分为目态和管态,主要是为了把用户程序和操作系统程序区分开,以利于程序的共享和保护。 5.从资源分配的角度讲,计算机系统中的资源分为处理机、、和。操作系统相应的组成部分是、、和。 【答案】处理机、存储器、输入/输出设备和文件资源;处理机管理、存储器管理、设备管理和文件系统 【解析】计算机系统中的资源分为硬件资源和软件资源。硬件资源有处理机、内/外存储器及输入/输出设备。而软件资源指的是程序、数据和相应的文档。从资源管理的观点,操作系统是计算机资源系统的管理系统,它提供了处理机管理、存储器管理、输入/输出设备管理和信息文件管理的功能。对每种资源的管理都可从提供资源情况的记录、资源分配策略、资源分配和回收等几个方面来加以讨论。 6.根据服务对象不同,常用的单处理机OS可以分为如下三种类型: 允许多个用户在其终端上同时交互地使用计算机的OS称为①,它通常采用②策略为用户服务; 允许用户把若干个作业提交计算机系统集中处理的OS,称为③,衡量这种系统性能的一个主要指标是系统的④; 在⑤的控制下,计算机系统能及时处理由过程控制反馈的数据并作出响应。设计这种系统时,应首先考虑系统的⑥。 【答案】①分时OS,②时间片轮转,③批处理OS,④吞吐率,⑤实时OS,⑥实时性和可靠性 【解析】分时操作系统、批处理操作系统和实时操作系统是操作系统的三种基本类型。分时系统一般采用时间片轮转的办法,使一台计算机同时为多个终端用户服务,对每个用户都能保证足够快的响应时间,并提供交互会话能力;批处理系统则是把用户提交的作业(包括程序、数据和处理步骤)成批输入计算机,然后由作业调度程序自动选择作业运行,从而缩短了作业之间的交接时间,减少了处理机的空闲等待,提高了系统效率;实时系统是操作系统的另一种类型,要求对外部输入的信息能以足够快的速度进行处理,并在被控对象允许的时间范围内作出快速响应,其响应时间要求特别高。由于实时系统大部分是为特殊的实时任务设计的,这类任务对系统的可靠性和安全性要求很高。
窗体顶端 您的本次作业分数为:100分单选题 1.【第01~04章】以下描述中,()并不是多线程系统的特长。 A 利用线程并行地执行矩阵乘法运算。 B web服务器利用线程请求http服务 C 键盘驱动程序为每一个正在运行的应用配备一个线程,用来响应相应的键盘输入。 D 基于GUI的debugger用不同线程处理用户的输入、计算、跟踪等操作。 正确答案:C 单选题 2.【第01~04章】现代操作系统的基本特征是()、资源共享和异步性。 A 多道程序设计 B 中断处理 C 实现分时与实时处理 D 程序的并发执行 正确答案:D 单选题 3.【第01~04章】操作系统的进程管理模块并不负责()。 A 进程的创建和删除 B 提供进程通信机制 C 实现I/O设备的调度 D 通过共享内存实现进程间调度。 正确答案:C 单选题 4.【第01~04章】下列选择中,()不是操作系统必须要解决的问题。 A 提供保护和安全机制 B 管理目录和文件 C 提供应用程序接口
D 提供C++语言编译器 正确答案:D 单选题 5.【第01~04章】用户在程序中试图读存放在硬盘中某文件的第10逻辑块,使用操作系统提供的接口是()。 A 进程 B 系统调用 C 库函数 D 图形用户接口 正确答案:B 单选题 6.【第01~04章】操作系统的管理部分负责对进程进行调度。 A 主存储器 B 控制器 C 运算器 D 处理机 正确答案:D 单选题 7.【第01~04章】下面关于进程的叙述不正确的是()。 A 进程申请CPU得不到满足时,其状态变为就绪状态。 B 在单CPU系统中,任一时刻有一个进程处于运行状态。 C 优先级是进行进程调度的重要依据,一旦确定不能改变。 D 进程获得处理机而运行是通过调度而实现的。 正确答案:C 单选题 8.【第01~04章】下列选项中,操作系统提供给应用程序的接口是()。 A 系统调用 B 中断 C 库函数
《操作系统原理》练习题 一、填空题 1. 每个进程都有一个生命周期,这个周期从__(1)__开始,到__(2)__而结束。 2. 当一个进程独占处理器顺序执行时,具有两个特性:__(3)__和可再现性。 3. 并发进程中与共享变量有关的程序段称为__(4)__。 4. 一个进程或者由系统创建,或者由__(5)__创建。 5. 一个进程的静态描述是处理机的一个执行环境,被称为__(6)__。 6. 信号量的物理意义是:信号量大于0,其值为__(7)__;信号量小于0,其绝对值为__(8)__。 7. 系统有某类资源5个,供3个进程共享,如果每个进程最多申请__(9)__个该类资源,则系统是安全的。 8. 不可中断的过程称为__(10)__。 9. 操作系统中,进程可以分为__(11)__进程和__(12)__进程两类。 10. 操作系统为用户提供两种类型的使用接口,它们是__(13)__接口和__(14)__接口。 11. 批处理操作系统中,操作员根据作业需要把一批作业的有关信息输入计算机系统,操作系统选择作业并根据__(15)__的要求自动控制作业的执行。 12. 在批处理兼分时的系统中,往往由分时系统控制的作业称为前台作业,而由批处理系统控制的作业称为__(16)__作业。 13. 采用SPOOL技术的计算机系统中,操作员只要启动__(17)__程序工作,就可以把作业存放到__(18)__中等待处理。 14. 作业控制方式有__(19)__方式和__(20)__方式二种。 15. 对资源采用抢夺式分配可以防止死锁,能对处理器进行抢夺式分配的算法有__(21)__算法和__(22)__算法。 16. 因争用资源产生死锁的必要条件是互斥、__(23)__、不可抢占和__(24)__。 17. 死锁的形成,除了与资源的__(25)__有关外,也与并发进程的__(26)__有关。 18. 为破坏进程循环等待条件,从而防止死锁,通常采用的方法是把系统中所有资源类进行__(27)__,当任何一个进程申请两个以上资源时,总是要求按对应资源号__(28)__次序申请这些资源。 19. 内存管理的核心问题是如何实现__(29)__的统一,以及它们之间的__(30)__问题。 20. 页式存储管理中,处理器设置的地址转换机构是__(31)__寄存器。 21. 在页式和段式存储管理中,__(32)__存储管理提供的逻辑地址是连续的。 22. 实现地址重定位或地址映射的方法有两种:__(33)__和__(34)__。 23. 在响应比最高者优先的作业调度算法中,当各个作业等待时间相同时,__(35)__的作业将得到优先调度;当各个作业要求运行的时间相同时,__(36)__的作业得到优先调度。 24. 确定作业调度算法时应注意系统资源的均衡使用,即使CPU繁忙的作业和__(37)__的作业搭配使用。 25. 按照组织形式分类文件,可以将文件分为普通文件、目录文件和__(38)__。 26. 文件系统为用户提供了__(39)__的功能,以使得用户能透明地存储访问文件。 27. 文件名或记录名与物理地址之间的转换通过__(40)__实现。 28. 文件的__(41)__与文件共享、保护和保密紧密相关。
操作系统原理作业 第1章 1-2 批处理系统和分时系统各有什么特点?为什么分时系统的响应比较快? 答:在批处理系统中操作人员将作业成批装入计算机并由计算机管理运行,在程序的运行期间用户不能干预,因此批处理系统的特点是:用户脱机使用计算机,作业成批处理,系统内多道程序并发执行以及交互能力差。在分时系统中不同用户通过各自的终端以交互方式共同使用一台计算机,计算机以“分时”的方法轮流为每个用户服务。分时系统的主要特点是:多个用户同时使用计算机的同时性,人机问答方式的交互性,每个用户独立使用计算机的独占性以及系统响应的及时性。分时系统一般采用时间片轮转的方法使一台计算机同时为多个终端用户服务,因此分时系统的响应比较快。 1-4什么是多道程序设计技术?试述多道程序运行的特征。 答:多道程序设计技术是指同时把多个作业(程序)放入内存并允许它们交替执行和共享系统中的各类资源;当一道程序因某种原因(如 I/O 请求)而暂停执行时,CPU 立即转去执行另一道程序。多道程序运行具有如下特征:多道计算机内存中同时存放几道相互独立的程序。宏观上并行:同时进入系统的几道程序都处于运行过程中,它们先后开始了各自的运行但都未运行完毕。微观上串行:从微观上看内存中的多道程序轮流或分时地占有处理机,交替执行。 1-6操作系统的主要特性是什么?为什么会有这样的特性? 答:并发性,共享性,异步性,虚拟性,这些特性保证了计算机能准确的运行,得出想要的结果。 1-7 (1)工作情况如图。 (2)CPU有空闲等待,它发生在100 ms 150 ms时间段内,此时间段内程序A与程序B 都在进行I/O操作。 (3)程序A无等待现象,程序B在0 ms 50 ms时间段与180 ms 200 ms时间段内有等待现象。 第2章 2-1 什么是操作系统虚拟机? 答:在裸机上配置了操作系统程序后就构成了操作系统虚拟机 2-3 什么是处理机的态?为什么要区分处理机的态? 答:处理机的态,就是处理机当前处于何种状态,正在执行哪类程序。为了保护操作系统,至少需要区分两种状态:管态和用户态。 2-5 什么是中断?在计算机系统中为什么要引用中断?
第六章文件系统 6.3习题 6.3.1 单项选择题 1.操作系统对文件实行统一管理,最基本的是为用户提供( )功能。 A.按名存取 B.文件共享 C.文件保护 D.提高文件的存取速度 2.按文件用途分类,编译程序是( )。 A.系统文件 B.库文件 C.用户文件 D.档案文件 3.( )是指将信息加工形成具有保留价值的文件。 A.库文件 B.档案文件 C.系统文件 D.临时文件 4.把一个文件保存在多个卷上称为( )。 A.单文件卷 B.多文件卷 C.多卷文件 D.多卷多文件 5.采取哪种文件存取方式,主要取决于( )。 A.用户的使用要求 B.存储介质的特性 C.用户的使用要求和存储介质的特性 D.文件的逻辑结构 6.文件系统的按名存取主要是通过( )实现的。 A.存储空间管理 B.目录管理 C.文件安全性管理 D.文件读写管理7.文件管理实际上是对( )的管理。 A.主存空间 B.辅助存储空间 C.逻辑地址空间 D.物理地址空间8.如果文件系统中有两个文件重名,不应采用( )结构。 A.一级目录 B.二级目录 C.树形目录 D.一级目录和二级目录9.树形目录中的主文件目录称为( )。 A.父目录 B.子目录 C.根目录 D.用户文件目录 10.绝对路径是从( )开始跟随的一条指向制定文件的路径。 A.用户文件目录 B.根目录 C.当前目录 D.父目录 11.逻辑文件可分为流式文件和( )两类。 A.索引文件 B.链接文件 C.记录式文件 D.只读文件 12.由一串信息组成,文件内信息不再划分可独立的单位,这是指( )。A.流式文件 B.记录式文件 C.连续文件 D.串联文件 13.记录式文件内可以独立存取的最小单位是由( )组成的。 A.字 B.字节 C.数据项 D.物理块 14.在随机存储方式中,用户以( )为单位对文件进行存取和检索。 A.字符串 B.数据项 C.字节 D.逻辑记录
浙江大学远程教育学院 《操作系统原理》课程作业 姓名:学号: 年级:学习中心:————————————————————————————— 一、单选题 6.采用段式存储管理的系统中,若地址用32位表示,其中20位表示段号,则允许每段的最大长度是 A. 224 B. 212 C. 210 D. 232 7.在一段式存储管理系统中,某段表的内容如下: 段号段首址段长 0 100K 35K 1 560K 20K 2 260K 15K 3 670K 32K 若逻辑地址为(2, 158),则它对应的物理地址为_____。 A. 100K+158 B. 260K+158 C. 560K+158 D. 670K+158 8.一个分段存储管理系统中,地址长度为32位,其中段长占8位,则最大段长是 A. 28字节 B. 216字节 C. 224字节 D. 232字节 9.有一请求分页式存储管理系统,页面大小为每页100字节,有一个50×50的整型数组按行为主序连续存放,每个整数占两个字节,将数组初始化为0的程序描述如下:int A[50][50]; for (int i = 0; i < 50; i++) for (int j = 0; j < 50; j++) A[i,j] = 0; 若在程执行时内存只有一个存储块用来存放数组信息,试问该程序执行时产生次缺页中断。 A.1 B. 50 C. 100 D. 2500
10.一台计算机有4个页框,装入时间、上次引用时间、和每个页的访问位R和修改位M,如下所示: 页装入时间上次引用时间 R M 0 126 279 0 0 1 230 260 1 0 2 120 272 1 1 3 160 280 1 1 采用FIFO算法将淘汰页; A. 0 B. 1 C. 2 D. 3 11.一台计算机有4个页框,装入时间、上次引用时间、和每个页的访问位R和修改位M,如下所示: 页装入时间上次引用时间 R M 0 126 279 0 0 1 230 260 1 0 2 120 272 1 1 3 160 280 1 1 采用NRU算法将淘汰页; A. 0 B. 1 C. 2 D. 3 12.一台计算机有4个页框,装入时间、上次引用时间、和每个页的访问位R和修改位M,如下所示: 页装入时间上次引用时间 R M 0 126 279 0 0 1 230 260 1 0 2 120 272 1 1 3 160 280 1 1 采用LRU算法将淘汰页; A. 0 B. 1 C. 2 D. 3 13.一台计算机有4个页框,装入时间、上次引用时间、和每个页的访问位R和修改位M,如下所示: 页装入时间上次引用时间 R M 0 126 279 0 0 1 230 260 1 0 2 120 272 1 1 3 160 280 1 1 采用第二次机会算法将淘汰______页; A. 0 B. 1 C. 2 D. 3 二、综合题
《操作系统原理》习题答案 一、单项选择题 1、(信号量)是一种只能进行P、V操作的特殊变量。 2、一个进程是(PCB结构与程序和数据的组合)。 3、操作系统中,当(时间片完),进程从执行状态转变为就绪状态。 4,设有三个作业J1,J2,J3同时到达,运行时间分别为T1,T2,T3,且T1≤T2 ≤ T3。若它们在一台处理机上按单道运行,采用短作业优先算法,则平均周转时间为(T1+ 2/3T2 + 1/3T3)。 5、在操作系统中,死锁出现是指(若干进程因竞争资源而无限等待其他进程释放已占有的资源) 6.若系统有三个并发进程,都需要同类资源4个,试问该系统不会发生死锁的最少资源数是( 10 ) 。 7、预防死锁的论述中,(可以通过破坏产生死锁的四个必要条件之一或其中几个的方法,来预防发生死锁)条是正确的论述。 8、关于死锁与不安全状态的关系,下列描述正确的有(死锁是一种不安全状态): 9、银行家算法是一种(死锁避免)算法。 10、以下哪种算法不属于多个分区的可变分区存储管理方式的主存分配算法(最后适应分配算法) 11、在固定分区管理方式中,处理器执行作业时,对每条指令中的地址要求满足(下限地址≤绝对地址≤上限地址) 12、以下叙述中,不正确的是(采用动态和静态重定位的系统都支持“程序浮动”) 13、在页式存储管理中,假定地址用m个二进制位表示,其中页内地址部分占用了n个二进制位,那么最大的作业允许有(2(m-n) )个页面。 14、关于一个分区的存储管理,以下叙述不正确的是(一个分区的存储管理中,必须采用动态重定位的方式进行地址转换) 15、下面哪种算法不属于页式虚拟存储管理中的页面调度算法(优先数调度算法) 16、缺页中断率与哪个因素无关(作业的逻辑地址) 17、很好地解决了“零头”问题的存储管理方法是(页式存储管理) 18、在存储管理中,(可变分区管理)可与覆盖技术配合. 19、虚拟存储器的最大容量(由计算机的地址结构决定) 20、下述(先进先出)页面淘汰算法会产生BELADY现象. 21、计算机系统的二级存储包括(主存储器和辅助存储器) 22、以下关于主存空间的说法中正确的是(操作系统与硬件的接口信息、操作系统的管理信息和程序等存放在主存储器的系统区) 23、联想存储器在计算机系统中是用于(地址变换) 24、以下有关可变分区管理中采用的主存分配算法说法中错误的是(最佳适应算法是最好的算法,但后过的较大作业很难得到满足)
第2章操作系统的界面 (1) 请说明系统生成和系统引导的过程。 解: 系统的生成过程:当裸机启动后,会运行一个特殊的程序来自动进行系统的生成(安装),生成系统之前需要先对硬件平台状况进行检查,或者从指定文件处读取硬件系统的配置信息,以便根据硬件选择合适的操作系统模块组,比较重要的信息通常有:CPU类型、内存大小、当前关联设备的类型和数量以及操作系统的重要功能选项和参数。按照这些信息的指示,系统生成程序就可以正确地生成所需的操作系统。 系统引导的过程:系统引导指的是将操作系统内核装入内存并启动系统的过程。主要包括初始引导、内核初始化、全系统初始化。初始引导工作由BIOS完成,主要完成上电自检,初始化基本输入输出设备,载入操作系统内核代码等工作。内核被载入内存后,引导程序将CPU控制权交给内核,内核将首先完成初始化功能,包括对硬件、电路逻辑等的初始化,以及对内核数据结构的初始化,如页表(段表)等。全系统初始化阶段要做的就是启动用户接口程序,对系统进行必要的初始化,使系统处于等待命令输入状态。 (2) 操作系统具有哪些接口?这些接口的作用是什么? 解: 操作系统为用户提供的接口有图形接口、命令接口和程序接口几种形式。 操作系统包括三种类型的用户接口:命令接口(具体又可分为联机命令接口与脱机命令接口)、程序接口及图形化用户接口。其中,命令接口和图形化用户接口支持用户直接通过终端来使用计算机系统,而程序接口则提供给用户在编制程序时使用。 (3) 请说明操作系统具有的共性服务有哪些不同类别,这些类别分别用于完成什么功能? 解:所有的操作系统都通过一些基本服务来帮助用户简单便捷地使用计算机各类资源,它们包括以下几个类别: 1.控制程序运行:系统通过服务将用户程序装入内存并运行该程序,并且要控制程序 在规定时间内结束。 2.进行I/O操作:用户是不能直接控制设备的,只能通过操作系统与外部设备进行交 互,由系统调用将结果显示在屏幕上或交给用户。 3.操作文件系统:为了保证实现“按名存取”,文件系统应该为用户提供根据文件名 来创建、访问、修改、删除文件的方法,以确保文件数据的安全可靠以及正确存取。 4.实现通信:操作系统需要提供多个程序之间进行通讯的机制,来控制程序的执行顺 序。 5.错误处理:操作系统通过错误处理机制,以便及时发现错误并采取正确的处理步骤, 避免损害系统的正确性和统一性。 (4) 系统调用的用途是什么? 解: 通常,在操作系统内核设置有一组用于实现各种系统功能的子程序(过程),并将它们提供给用户程序调用。每当用户在程序中需要操作系统提供某种服务时,便可利用一条系统调用命令,去调用所需的系统过程。这即所谓的系统调用。系统调用的主要类型包括: 1.进程控制类,主要用于进程的创建和终止、对子进程结束的等待、进程映像的替换、 进程数据段大小的改变以及关于进程标识符或指定进程属性的获得等; 2.文件操纵类,主要用于文件的创建、打开、关闭、读/写及文件读写指针的移动和
操作系统原理复习题 一、名词解释题 1. 中断 2. 进程控制块(PCB) 3. 虚时钟 4. 段式管理 5. 文件控制块(FCB) 6. 对换(SWAPPING) 7. 系统调用 8. 绝对路径名 9. 特别文件10. 虚设备技术 11. 管道 12. 中断接收 13. 恢复现场 14. 页式管理 15. 作业步 16. 字符流文件 17. 通道 18. 页面淘汰 19. 多道程序设计 20. 死锁 21. 当前目录 22. 快表 23. 作业调度 24. 原语 25. 中断屏蔽 26. 地址映射 27. 文件目录 28. 死锁避免 29. 原语 30. 作业控制块 31. CPU状态 32. 虚存 33. 磁盘调度 34. 缓冲技术 35. 中断 36. 进程调度 37. 虚设备 39. 死锁预防 40. 文件目录 41. 原语 42. 交换技术 43. 互斥区 二. 填空题 1. 分时系统追求的目标是_____. 2. 用户进程从目态(常态)转换为管态(特态)的唯一途径是____. 3. 从静态的观点看, 操作系统中的进程是由程序段、数据和____三部分组成. 4. 在系统内核中必须包括的处理模块有进程调度、原语管理和____. 5. 批处理操作系统中, 作业存在的唯一标志是____. 6. 操作系统中的一种同步机制, 由共享资源的数据及其在该数据上的一组操作组成, 该同步机制称为________. 7. 在可变分区存储管理中, 为实现地址映射, 一般由硬件提供两个寄存器, 一个是基址寄存器, 另一个是____. 8. 联想寄存器(相联存储器)的最重要、最独到的特点是____. 9. 在虚拟段式存储管理中, 若逻辑地址的段内地址大于段表中该段的段长, 则发生____中断. 10. 文件系统中若文件的物理结构采用顺序结构, 则文件控制快FCB 中关于文件的物理位置应包括____. 11. 在操作系统设计时确定资源分配算法, 以消除发生死锁的任何可能性, 这种解决死锁的方法是____. 12. 选择对资源需求不同的作业进行合理搭配, 并投入运行是由____来完成的. 13. 实时系统应具有两个基本特征: 及时性和______. 14. 磁带上的文件只能采用_____存取方式. 15. 不让死锁发生的策略可以分成静态和动态的两种, 死锁避免属于_____. 16. 在UNIX系统中, 文件分成三类, 即普通文件, 目录文件和_____. 17. 在磁盘调度策略中有可能使I/O请求无限期等待的调度算法是_____. 18. 进程获得了除CPU外的所有资源, 一旦获得CPU即可执行, 这时进程处于_____状态. 19. 为实现CPU与外部设备的并行工作, 系统必须引入_____硬件基础. 20. 操作系统为保证不经文件拥有者授权, 任何其它用户不能使用该文件所提出的解决措施是_____. 21. 两个或两个以上程序在计算机系统中同处于开始和结束之间的状态, 这就称为_____. 22. 在操作系统的存储管理中, 存储共享的两个目的是_____和实现进程通信. 23. 在存储管理中, 为进程分配内存时, 取满足申请要求且长度最大的空闲区域, 这一算法称为_____.
(单选题) 1: 当进程执行中需要等待从磁盘上读取数据时,进程的状态将()。 A: 从就绪变为运行态 B: 从运行变为就绪态 C: 从阻塞变为就绪态 D: 从运行变为阻塞态 正确答案: (单选题) 2: 在操作系统分类中对于可靠性和安全性要求较高的是()。 A: 批处理系统 B: 分时处理系统 C: 实时处理系统 D: 个人机操作系统 正确答案: (单选题) 3: 在设备管理中引入I/O缓冲机制是为了缓和()之间的速度不匹配问题。A: 内存与处理器 B: 内存与外设 C: 处理器与外设 正确答案: (单选题) 4: 在页式存储管理中,其虚地址存储空间是() A: 一维的 B: 二维的 C: 三维的 正确答案: (单选题) 5: UNIX文件系统采用( )逻辑结构对文件进行管理。 A: 网状文件 B: 记录式文件 C: 索引文件 D: 3流式文件 正确答案: (单选题) 6: 在文件系统中,使用( )信息实现对文件的管理。 A: 文件存储位置 B: 文件目录 C: 文件内容 正确答案: (单选题) 7: 进程所具有的()及并发性是两个很重要的属性。 A: 动态性 B: 易用性 C: 顺序性 D: 静态性 正确答案: (单选题) 8: 所谓进程调度,其调度的对象和任务分别是( )。 A: 进程,从就绪队列中按一定的调度策略选择一个进程占用CPU B: 数据,将程序中使用的数据调入内存 C: 指令,将指令从外存储空间调入内存 正确答案: (单选题) 9: 计算机系统采用多道并发技术将会() A: 缩短每个程序的执行时间 B: 使系统效率随着并行道数的增加成正比增加 C: 使用设备时不发生冲突 D: 提高了系统的整体执行效率 正确答案: (单选题) 10: 在系统中增加cache可以缓解()之间的速度不匹配性。 A: 硬盘与内存
<<操作系统原理复习题答案>> 第一部分名词解释答案 第一章概论 计算机系统: 计算机系统由硬件和软件两大部分组成. 硬件(即物理计算机)是系统 的基本资源, 在硬件基础上配置的软件是对硬件功能的扩充和完善. 裸机: 即不附加任何软件的物理计算机. 虚拟机: 所谓虚拟是指逻辑的而非物理的计算机, 是指在物理计算机上加上若干层 软件上构成的比裸机功能更强的、使用更方便的``虚拟计算机''. 操作系统是加在裸机 上的第一层软件. 它是对裸机的首次扩充. 操作系统: 从结构上看, 操作系统是用户程序及系统应用, 应用程序, 单道程序系统, 多道程序系统, 中断, 通道, 异步事件, 批处理, 脱机方式, 批处理系统, 分时, 时间片, 响应时间, 分时系统, 实时, 单用户交互式系统, 实时系统, 网络操作系统, 管态, 目态, 特权指令, 非特权指令, 系统调用, 访管指令, 访管中断, 程序级接口, 人-机接口, 脱机级接口, 联机级接口, 前台作业, 后台作业, 并发性, 共享性, 不确定性, 并发, 并行, 顺序共享, 并发共享, 中断机构, 中断源, 中断请求, 断点, 中断响应, 中断处理程序, 中断处理, 中断返回, 输入输出中断, 故障中断, 程序状态字, 外部中断, 时钟, 界限寄存器, 存储保护键, 冷启动, 热启动. 2. 顺序性, 封闭性, 确定性, 可再现性, 竞争性, 制约性, 与速度无关, 进程概念, 执行状态, 就绪状态, 等待状态, 死锁状态, 挂起状态, 进程控制块, 纯代码, 可再入程序, 用户进程, 系统进程, 进程模块, 非进程模块, 原语, 内核, 进程控制, 互斥, 同步, 广义同步, 临界资源, 临界区, 同类临界区, 信号量, 忙等待方式, 让权等待方式, P V 操作, 生产者与消费者, 公用信号量, 私用信号量, 消息缓冲, 消息队列, 管道, 作业, 脱机作业, 联机作业, 作业控制, 作业控制块. 3. 高级调度, 中断调度, 低级调度, 进程调度, 调度方式, CPU 周期, 剥夺方式, 非剥夺方式, 吞吐量, 平均周时间, 平均带权周转时间, 平均等待时间, 响应比, 先来先服务, 短作业优先, 最高响应比优先, 轮转法, 高优先级优先, 静态优先数, 动态优先数, 多级反馈队列, 调度程序, 系统开销, 系统颠簸. 4. 存储空间, 地址空间, 物理地址, 逻辑地址, 绝对地址, 相对地址, 名空间, 虚空间, 地址映射, 静态映射, 动态映射, 静态分配, 动态分配, 内存保护, 内存扩充, 分区, 碎片, 内碎片, 首次适应法, 最佳适应法, 最坏适应法, 固定分区, 可变分区, 地址越界, 越界中断, 覆盖, 交换, 整体交换, 部分交换,
操作系统原理复习题一及答案 一、单选题 1.软件的分类中下列哪个不是包含?() A系统软件 B应用软件 C程序软件 D工具软件 2.多道程序执行的特征是:() A多道 B宏观上并行 C微观上串行 D都正确 3.下面哪种不是缓冲技术?() A双缓冲 B多重缓冲 C环形缓冲 D缓冲池 4.I/O控制的主要功能中不包括哪个方面的功能? () A中断处理 B设备驱动 C优化传送数据 D解释用户的I/O系统调用命令 5.下列哪些是文件逻辑结构的两种形式?() A流式文件 B记录式文件 C两者都是 D两者都不是 6.下列哪些是设备管理器所具备的功能?() A状态跟踪 B设备存取 C设备分配 D以上都是 7.下面哪个不是顺序存储器的特点?() A灵活性 B封密性 C可再现性 D顺序性 8.下列哪些不属于外部设备中断的是哪一项?() A传输结束中断 B传输进程中断 C设备故障中断 D传输错误中断9.下列哪个不是分时系统所具备的特点?() A多路调制性 B独占性 C交互性 D完整性 10.CORBA(通用对象请求代理体系结构)规范的主要技术特点有哪些?() A引入了代理的概念 B客户端与服务器完全分离 C提供了软件总线规则 D都是 11.磁盘的结构允许文件管理系统按哪几种不同的方法组织文件?() A应用文件 B连续文件 C串联文件 D随即文件 12.一般情况下,页式系统需要解决的问题有哪些?() A调入策略 B淘汰策略 C放置策略 D都是的 二、多选题 1.计算机网络主要由以下哪些部分组成?() A若干个主机 B一个通信子网 C多个主机 D一系列协议 2.计算机网络的功能有哪些?() A信息传递 B资源共享 C提高计算机的可靠性和可用性 D易于实现分布处理 3.网络操作系统原语可分为哪几类?() A用户通信原语 B作业迁移原语 C数据迁移原语 D控制原语 4.构成操作系统的方法有哪些?() A分布式结构 B无结构 C层次式结构 D客户/服务器模型 5.系统引导分为哪几个阶段? () A初始引导 B启动初始化 C核心初始化 D系统初始化 6.管理存储器的策略有以下哪些?() A放置策略 B调入策略 C淘汰策略 D筛选策略 三、填空题 1.操作系统式一个大型的;
15春学期《操作系统原理》在线作业 试卷总分:100 测试时间:-- 试卷得分100 一、单选题(共20 道试题,共40 分。)V 1. 文件系统采用多级目录结构可以() A. 节省存储空间 B. 解决命名冲突 C. 缩短文件传送时间 D. 减少系统开销 B 满分:2 分 2. 在下述存储管理技术中,只有()可提供虚拟存储基础 A. 动态分区法 B. 交换技术 C. 静态分页法 D. 动态分页 D 满分:2 分 3. 下列对于进程的描述哪项是错误的 A. 各进程之间的地址是相互独立的 B. 进程控制块PCB是在系统调用进程时随机生成的 C. 进程是静态的 D. 进程同程序相比具备并发和异步执行特征 C 满分:2 分 4. 程序执行时下一条执行指令的地址放在()寄存器中 A. IR B. PSW C. PC C 满分:2 分 5. 一个进程从内存中换出到外存时,该进程被称作为() A. 被阻塞 B. 被终止 C. 唤醒 D. 被挂起 D 满分:2 分 6. 在分页存储管理系统中,从页号到物理块号的地址映射是通过()实现的 A. 段表 B. 页表 C. PCB D. JCB B 满分:2 分 7. 在UNIX系统进程调度中,当计算的进程优先数越大时其优先级将() A. 越大 B. 越小 B B 满分:2 分 8. 在文件管理中,使用链式结构可以实现()
A. 磁盘驱动控制 B. 磁盘空间分配与回收 C. 文件目录查找 D. 页面置换 B 满分:2 分 9. 在时间片轮转(RR)法中,如果时间片过长,该算法会退化为()算法。 A. 短进程优先(SPN) B. 时间片轮转(RR) C. 先来先服务(FCFS) D. 优先级法(PS) C 满分:2 分 10. 当为一个新创建的进程分配资源和建立了PCB后,进程将进入() A. 运行态 B. 阻塞态 C. 就绪态 D. 退出态 C 满分:2 分 11. 在系统中增加cache可以缓解()之间的速度不匹配性。 A. 硬盘与内存 B. 内存与处理器 C. 内存与I/O设备 D. 硬盘与I/O设备 B 满分:2 分 12. 中断管理程序不包括下列哪项功能 A. 确定发生中断的特性 B. 将控制权切换到处理程序 C. 执行具体的处理过程 D. 将控制权切换到原执行程序 C 满分:2 分 13. 在时间片轮转(RR)法中,如果时间片过长,该算法会退化为()算法。 A. 短进程优先(SPN) B. 时间片轮转(RR) C. 先来先服务(FCFS) D. 优先级法(PS) C 满分:2 分 14. 下列分区管理的分配算法中,分配与释放时间性能最好的是() A. 最先匹配法 B. 最佳匹配法 C. 下次匹配法 D. 最坏匹配法 A 满分:2 分 15. 在下列的文件物理存储结构中最不便于进行文件扩充的结构是() A. 散列文件 B. 链接文件
习题六参考答案(P132) 6-2某系统进程调度状态变迁图如图6.5所示(设调度方式为非剥夺方式),请说明: (1)什么原因将引起发生变迁2、变迁3、变迁4? (2)当观察系统中所有进程时,能够看到某一进程产生的一次状态 变迁能引起另一进程作一次状态变迁,在什么情况下,一个进程的变 迁3能立即引起另一个进程发生变迁1? (3 生? (a ) 图6.5 解答:(1)当运行进程在分得的时间片内未完成,时间片到将发生变 迁2; 当运行进程在执行过程中,需要等待某事件的发生才能继续向下执行,此时会发生变迁3; 当等待进程等待的事件发生了,将会发生变迁4。 o m P D F d T r i a l
(2)正在运行的进程因等待某事件的发生而变为等待状态的变迁3,在就绪队列非空时会立即引起一个就绪进程被调度执行的变迁1。 (3)a .3->1的因果变迁可能发生 正在运行的进程因等待某事件的发生而变为等待状态的变迁3,在就绪队列非空时必然引起一个就绪进程被调度执行的变迁1。 b.3->2的因果变迁不可能发生。 c.2->1的因果变迁必然发生 正运行的进程因时间片到变为就绪状态的变迁2,必然引起一个就绪进程被调度执行的变迁1。 6-3若题2中所采用的调度为可剥夺式,请回答题2中提出的问题: (1)什么原因将引起发生变迁2、变迁3、变迁4? (2)当观察系统中所有进程时,能够看到某一进程产生的一次状态变迁能引起另一进程作一次状态变迁,在什么情况下,一个进程的变迁3能立即引起另一个进程发生变迁1? (3)下述因果变迁是否可能发生?如果可能的话,在什么情况下发 生? (a )3->1;(b )3->2;(c )2->1 解答:(1)当运行进程在分得的时间片内未完成,时间片到将发生变 迁2;或者新创建一个进程或一个等待进程变成就绪,它具有比当前进程更高的优先级,也将发生变迁2。 h t t p ://w w w .p d f d o .c o m P D F d o P a s s w o r d R e m o v e r T r i a l