技术专题
编者按
本刊2009年第6期刊登了 信息化测绘时代的工程测量技术发展 技术专题综述部分和数据获取部分的两篇论文,在读者中引起强烈反响,大家对该专题后续论文的刊出给予了期待。本期以 数据处理与管理 部分为重点,向读者奉献3篇论文: 现代测量平差与数据处理理论的进展 (由中南大学朱建军教授等撰写)、 工程数据库的发展要素与建设 (由建设综合勘察研究院黄坚研究员等撰写)和 工程测量标准体系的构建与发展 (由中国有色金属工业西安勘察设计研究院郭渭明教授等撰写),分别从现代测量平差与数据处理理论、工程数据库、工程测量标准体系三个方面论述了 数据处理与管理 的基础理论、技术方法和发展趋势等。同时,本期还刊登 综述 部分之 工程测量在信息化测绘战略跨越中的拓展 (由北京城建勘测设计研究院秦长利教授撰写)和 典型应用 部分之 激光雷达国家体育馆屋顶钢结构安装滑移质量监测 (由北京建筑工程学院王晏民教授等撰写)。前者对在信息化测绘战略跨越中工程测量采用卫星定位测量、摄影测量、GIS、大型工程精密工程测量、轨道交通精密施工测量和变形监测等技术和方法及其应用成果进行了论述;后者探讨了激光雷达技术应用于国家体育馆屋顶钢结构安装与质量监测的作业流程、特征数据提取及精度分析等。
现代测量平差与数据处理理论的进展
朱建军,宋迎春
(中南大学信息物理工程学院,长沙 410083)
摘要:本文首先简述了现代测量平差中的各种理论与经典测量平差之间的关系,指出现代测量平差与数据处理理论仍然是以高斯-马尔柯夫模型为核心,通过该模型在不同层面上的扩充、发展形成了若干新理论、新方法,并以图描述了经典测量与现代测量数据处理中各种理论之间的关系。然后分别阐述了现代测量数据处理中粗差理论、系统误差的处理、病态问题的处理、非线性问题的处理、不等式约束的平差等的发展,最后综述了其他数据处理理论的一些发展情况。
关键词:经典测量平差;现代测量平差;高斯-马尔柯夫误差模型;误差模型扩展
中图分类号:P207文献标识码:B
Progress of modern surveying adjustment and theory of data processing
Zhu Jianjun,Song Yingchun
(School of Geomatics,Central South Unive rsity,Chan gsha 410083,China)
Abstract:This paper described the relationship between the theories in modern surveying adjustment and the traditional surveying adjustment.It pointed out that the theories of modern surveying adjustment and the data processing should be still based on Gauss-Markov error model.Through enlarge ment and development in different aspects of the model,ne w theories and methods are worked out.A figure showing such relationship is given.
Meanwhile,the theories on blunder detec tion,systematic error processing,il-l pose problem,nonlinear model, inequality constraints are elaborated.At the last the progresses of other theories on data processing are summarized.
Key words:traditional surveying adjustment;modern surveying adjustment;Gauss-Markov error model;
e xtension o
f error model
收稿日期:2009-09-28
作者简介:朱建军(1962-),男(汉族),湖南双峰人,博士,教授.
1 现代测量平差与数据处理理论发展概述
经典的测量平差与数据处理是以高斯-马尔柯夫模型为核心[1]:
L=AX+ (1a)
E( )=0,D( )= 20Q= 20P-1(1b)
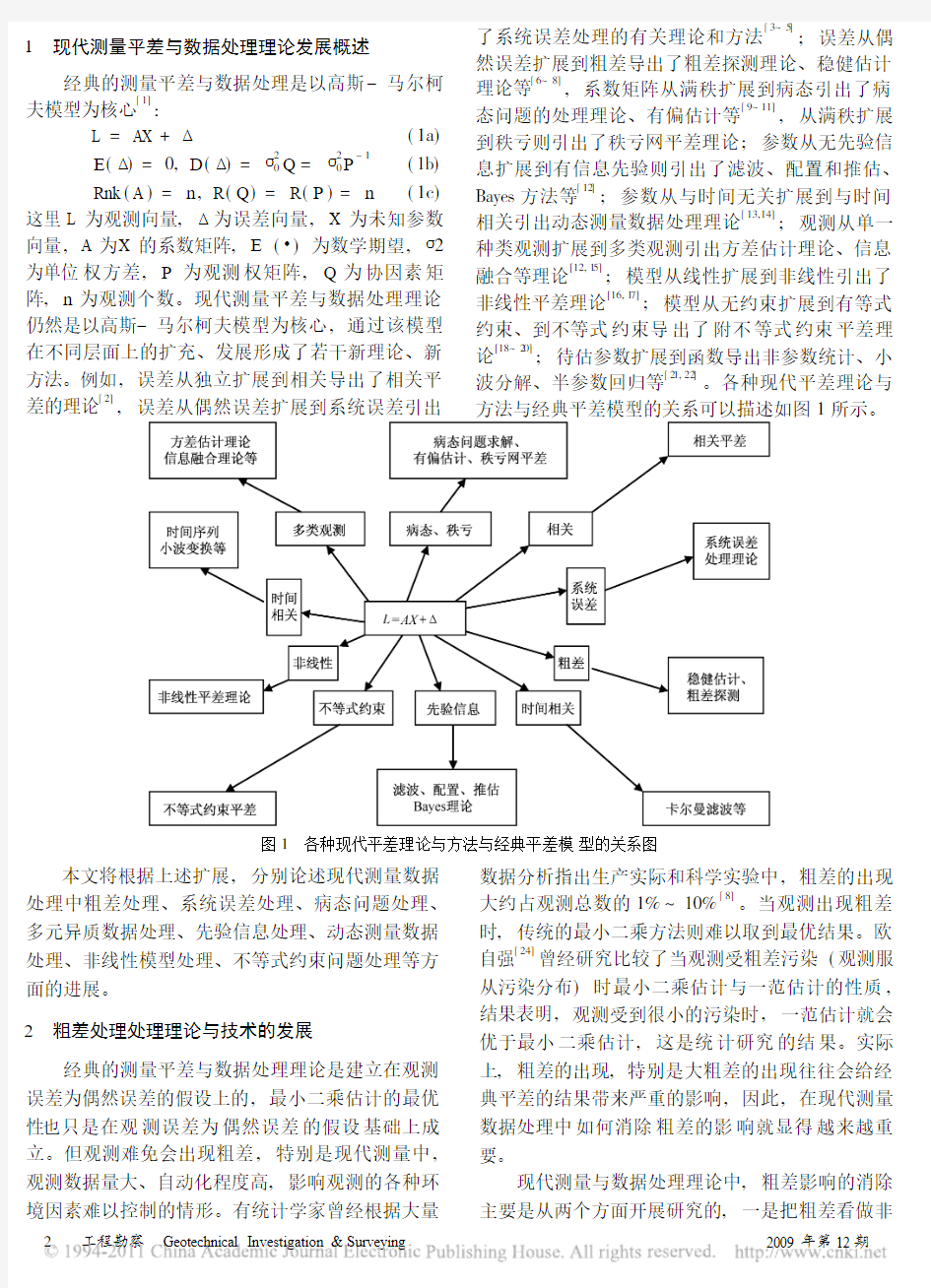
Rnk(A)=n,R(Q)=R(P)=n(1c)这里L为观测向量, 为误差向量,X为未知参数向量,A为X的系数矩阵,E( )为数学期望, 2为单位权方差,P为观测权矩阵,Q为协因素矩阵,n为观测个数。现代测量平差与数据处理理论仍然是以高斯-马尔柯夫模型为核心,通过该模型在不同层面上的扩充、发展形成了若干新理论、新方法。例如,误差从独立扩展到相关导出了相关平差的理论[2],误差从偶然误差扩展到系统误差引出了系统误差处理的有关理论和方法[3~5];误差从偶然误差扩展到粗差导出了粗差探测理论、稳健估计理论等[6~8],系数矩阵从满秩扩展到病态引出了病态问题的处理理论、有偏估计等[9~11],从满秩扩展到秩亏则引出了秩亏网平差理论;参数从无先验信息扩展到有信息先验则引出了滤波、配置和推估、Bayes方法等[12];参数从与时间无关扩展到与时间相关引出动态测量数据处理理论[13,14];观测从单一种类观测扩展到多类观测引出方差估计理论、信息融合等理论[12,15];模型从线性扩展到非线性引出了非线性平差理论[16,17];模型从无约束扩展到有等式约束、到不等式约束导出了附不等式约束平差理论[18~20];待估参数扩展到函数导出非参数统计、小波分解、半参数回归等[21,22]。各种现代平差理论与方法与经典平差模型的关系可以描述如图1
所示。
图1 各种现代平差理论与方法与经典平差模型的关系图
本文将根据上述扩展,分别论述现代测量数据
处理中粗差处理、系统误差处理、病态问题处理、
多元异质数据处理、先验信息处理、动态测量数据
处理、非线性模型处理、不等式约束问题处理等方
面的进展。
2 粗差处理处理理论与技术的发展
经典的测量平差与数据处理理论是建立在观测
误差为偶然误差的假设上的,最小二乘估计的最优
性也只是在观测误差为偶然误差的假设基础上成
立。但观测难免会出现粗差,特别是现代测量中,
观测数据量大、自动化程度高,影响观测的各种环
境因素难以控制的情形。有统计学家曾经根据大量
数据分析指出生产实际和科学实验中,粗差的出现
大约占观测总数的1%~10%[8]。当观测出现粗差
时,传统的最小二乘方法则难以取到最优结果。欧
自强[24]曾经研究比较了当观测受粗差污染(观测服
从污染分布)时最小二乘估计与一范估计的性质,
结果表明,观测受到很小的污染时,一范估计就会
优于最小二乘估计,这是统计研究的结果。实际
上,粗差的出现,特别是大粗差的出现往往会给经
典平差的结果带来严重的影响,因此,在现代测量
数据处理中如何消除粗差的影响就显得越来越重
要。
现代测量与数据处理理论中,粗差影响的消除
主要是从两个方面开展研究的,一是把粗差看做非
随机,从粗差主要影响观测值的均值的角度开展研究,即使用污染误差模型中的均值移动模型作为误差模型,使用粗差探测的有关方法来发现和剔除粗差;二是把粗差看做一种随机的大误差,从粗差主要影响观测方差的角度开展研究,即使用污染误差模型中的方差扩大模型作为误差模型,使用抗差估计(稳健估计)等方法来消除粗差的影响[3,7]。
在粗差探测方面,最早由Baarda提出了的数据探测法(Data-snooping)[25],
W i=V i
vi(2)
这里V i为观测改正数, vi为改正数的均方误差, W i为粗差探测统计量。该方法原则上只适用于一维粗差探测。对于多维粗差探测,国际国内许多专家使用不同的数学和统计方法都进行过尝试[3,26],近年,欧吉坤教授又提出了拟准平差的方法[27],目前仍然有学者从事这方面的研究。对于数据量大、变量多的情形,实用上,仍然是一维的方法代替多维方法进行探测。根据粗差探测的能力,又可以判断观测和估计结果的可靠性,从而建立测量方案设计的可靠性理论。
在稳健估计(抗差估计)方面,稳健估计的研究源自Huber等人的稳健统计理论[8,28]。其估计可以用如下模型描述[29]:
(V)= V T P V V=min(3a)
P V=P(V1)0 0
0 0
0P(V i)0
0 0
(3b)
这里观测方程由(1)式确定。各种稳健估计表现出的差别在于权函数P(V i)的不同。国际上最早提出的是丹麦法权函数,李德仁教授基于验后方差的思想提出了一种权函数,王之卓教授称之为 李德仁方法 。周江文教授提出了等价权的思想并由此提出了抗差估计的IUGG方案,杨元喜教授等进一步完善了周江文教授的有关理论与方法,并使这一理论和方法得到了全面的推广应用。朱建军基于均方误差的概念提出了均方误差最小的权函数[30]。并利用污染误差模型,将有关的理论和方法统一,建立了污染误差模型下的测量数据处理理论[7]。稳健估计的其他研究主是一范和P范方面的研究。
3 系统误差处理理论与技术的发展
关于系统误差的处理目前国际国内通用的主要方法是采用附加系统参数的平差方法:
L=AX+H S+ n(4)即根据观测对象、观测过程、及外界条件的物理特性等先验信息,建立系统误差与某些因素的函数关系,通过附加参数实现消除系统误差影响的目的。当系统误差的性态比较简单,函数关系比较准确时,这种方法能很好地消除系统误差的影响。但如果系统误差关系比较复杂难以用简单的函数描述时,这种方法则难以取得很好的效果。另一种传统的方法是通过精化客观的物理模型来削弱系统误差的影响(精化模型法),例如,通过精化大气模型等来改正和减少大气的系统性误差影响,通过精密星历来减少轨道误差的影响等,但数学模型与客观实际总会有差别,特别当客观实际变化较大难以用数学模型描述时,这些方法的应用就会受到限制。例如,对于GPS定位测量,即使使用精化模型后,残余的误差仍将会以系统误差为主。第三种方法是半参数回归的方法[21,22],半参数方法的优点是不需要对系统误差或模型误差的规律有明确的了解,因而这种方法在近年得到了测绘工作者的广泛重视。其缺点是只利用了数值计算中函数的光滑性去逼近非参数部分,目前并没有成熟的方法利用关于系统误差的先验知识。系统误差处理还有一些其它的方法,例如差分方法、观测值的线性组合方法等,这些方法主要是针对一些特殊的测量手段(如GPS),并且只在一定范围内有效(如短基线)。
4 病态问题处理理论与技术的进展
平差模型的另一个发展是将误差方程系数满秩扩展到秩亏和病态。秩亏和病态的平差模型形式上与经典平差模型没有区别,但经典的平差模型是隐含了系数矩阵A满秩的假设。对于传统的测量技术来说,由于技术手段单一,严格按照技术规范制定测量方案,一般很难出现系数矩阵病态的情况。例如,传统的平面三角测量,规范严格规定三角形内角必须在30~120 之间,特殊个别情况也应大于20 ,按这个规定布设的三角网肯定不会病态。但现代测绘的许多领域难以满足这一要求,例如大地测量反演、卫星重力的向下延拓、GPS的快速定位、近景摄影测量等都存在病态问题。
当方程病态时,最小二乘平差的结果非常不稳定,质量很差。为解决这一问题,研究工作是从两个方面展开的,一是有偏估计,二是正则化方法。Stein首先于1955年证明了当维数大于2时,正态均值向量的最小二乘估计是不容许估计,由此开辟
了有偏估计的研究。1970年Hoerl和Kennard从改善系数矩阵病态性质的角度提出了岭估计,其做法是在法方程系数矩阵对角线上加上一个微量从而达到改善方程病态的目的:
X^=(A T PA+kI)-1A T PL(5)这里k为岭参数。实践表明选择合理的岭参数确实能有效地改善病态方程的解。岭参数的选择最早提出的有双h公式、Hoer-l Kennard-Baldwin迭k公式及La wless-Wang的迭k公式[31]等。目前主要有岭迹法、有广义交叉核实、L曲线法、双h及改进类方法。在大地测量领域,归庆明提出利用特征根来确定岭参数[32],朱建军则针对岭估计效果与参数真值大小有关这一特性,提出了对参数估计量及岭参数同时迭代的方法,该方法对岭参数的初值选取要求很宽松[33]。
正则化方法是Tiklonov于1960年代初基于 稳定的近似解 的概念提出的,具体做法是对最小二乘准则进行适当的修正(近似):
V T PV+ (X)=min(6)其中 为平滑因子, (X)为稳定泛函。 (X)一般根据参数的一些先验信息或先验特征或虚拟的信息确定。大地测量领域中一般取 (X)=
Z T P Z Z, (Z)的不同形式通过P Z的不同形式来反映[9]。平滑因子确定的主要方法有广义交叉核实(GC V)法、L曲线法、遗传算法,自适应算法和验后法等等,对于 (X)函数,欧吉坤教授建议[10],依据参数的先验信息用选权拟合的方法确定P Z。王振杰还提出了先对法方程奇异值分解,利用奇异值分解矩阵构建P Z[37]。近年,沈云中教授等从谱分解角度探讨正则化算法[34],徐培亮等提出依据估计量的均方误差最小来确定准则参数的方法[35]。
5 非线性模型处理理论与方法
非线性模型的研究大约始于20世纪60年代, Box和Beale首先开展了这方面的研究,到80年代Ba tes及Watts提出了曲率度量的概念使非线性模型的估计理论得到了快速发展,测绘界在这方面的研究始于80年代,P J G Teunissen1985年及以后,先后研究了非线性模型最小二乘估计的一、二阶矩。阐述了非线性模型的识别、度量非线性强度的指标以及非线性模型曲率的几何意义等。通过对展开式中舍去项造成函数模型偏差的研究,提出从舍去的项中找出其对函数模型和参数的影响,然后对函数模型和参数的估值进行修正。徐培亮在1986年导出了非线性函数的协方差传播一般公式,通过简化得出了含有二次项的协方差传播公式,包括观测量间独立和相关两种情形的具体计算公式。非线性函数展开至二次项时,徐培亮给出严密、实用公式。然后,王新洲、刘国林、李朝逵等对非线性测量平差理论做了系统的研究和发展[16,17]。
非线性平差目前的主要算法有迭代法(牛顿迭代法、高斯-牛顿法、及相应的修正方法等)、直接解法、遗传算法、模拟退火算法等。对于非线性平差的方差估计问题,王志忠采用差分代替微分的方法,提出了非线性模型中严格的和简化的方差和协方差分量估计的迭代公式[36],这些公式适用于所有函数模型和随机模型。张松林等将半参数最小二乘核估计方法引入非线性模型,取得了好的效果[37]。
6 不等式约束平差模型新算法
在大地测量数据处理中,许多情况下可根据先验知识建立对参数的某种约束,如果所建立的约束是不等式形式,则形成了具有不等式约束的平差模型:
L=AX+ (7a)
G X W(7b)附不等式约束平差问题的主要算法可归纳为以下几种:
(1)将约束平差问题转化为一个最小距离问题(LDP),用非线性规划的方法来求解;卢刚等将该方法用于GPS单点定位解算中(附加高程约束),在有SA影响和卫星几何位置不够理想的情况下,得到了更精确的平面位置。但是由于解通过迭代获得,不能够表达成观测的显式形式,难以进行精度评定。
(2)将不等式约束转换成对参数的一种先验知识,也就是假设未知参数在不等式规定的区间内服从均匀分布,然后以贝叶斯统计推断理论为基础获得参数的验后分布,相应的贝叶斯解与单纯形解完全一致,能够计算贝叶斯解的均方误差矩阵(MSE),验后均值及其均方误差矩阵,从而解决解的精度评定问题。但是不能够得到解向量与观测向量之间的显式表达式,因而不容易得到参数估计值的统计特性。参数维数较高时,积分计算十分复杂[18]。
(3)有效约束法。附不等式约束的平差过程中,约束条件G X W在最优解X^处将分成两类G
=G
1
G2
,W=
W1
W2
,G X^ W
G1X^=W1
G2X^=W2
。最优解
等价于目标函数仅在有效约束条件下的解:
(X- X)T Q-1X(X- X)=min
G1X=W1
(8) 即将不等式约束平差,通过有效约束可转换成等式约束平差。其中G1X^=W1称为最优解X^处的有效约束;约束条件G2X^ (4)虚拟观测法。一种比较简单而有效的方法是将不等式转换成虚拟观测: L=AX+ GX W L+V=AX L W+V W=G X P w=k V W>0 0V W 0 按上述模型迭代求解,就可得到最后解。 其他有彭军还基于凝聚函数法给出了不等式约束平差问题的一种算法等[20]。附不等式约束平差的最大问题是难以进行精度评定。 7 其他数据处理方法综述 由于技术的发展,数据处理所涉及的内容越来越多样化和复杂,因而多种数据处理的理论和方法得到发展,多种数学理论在测量平差中得到广泛应用。 当平差问题涉及不同类观测时,就提出了不同类观测权的确定问题,由此导出了方差分量估计理论。方差分量估计的理论目前已经比较成熟,在有关教科书上都有介绍。 经典的平差模型(1)式中,模型参数X隐含了静态的,与时间无关的假设,也就是说系统参数X的个数不变,数值(真值)不变。但现代测绘中许多情况下,系统参数是随时间发生变化的,因此卡尔曼滤波理论在测量数据处理中得到了广泛的应用和发展。与经典的平差模型相比,由于系统参数随时间发生变化,因此平差模型中增加了描述系统变化规律的系统方程。经典模型中的观测也是与时间无关的,观测主要是针对静态的观测对象进行的。但现代测绘中,许多观测本身是针对一个动态过程的,因而观测是与时间相关的,由此时间序列的理论、小波方法、经验模式分解等理论在测量数据处理中得到了应用和发展。 当涉及到先验信息和其他非观测信息时,Bayes 理论、模糊数学等得到了应用和发展。当然涉及到地学空间信息处理时,地学空间统计学得到了发展。除此以外,神经网络、模式识别等在测绘领域中都得到了广泛的应用。由于技术的发展,观测种类越来越多,观测模型越来越复杂,测量平差与数据处理的理论和方法必将得到进一步的发展,在各种新技术中的应用将越来越重要。 参考文献 [1] 黄维彬.近代平差理论及其应用[M].北京:解放军出版 社,1992. [2] 冯浩鉴.相关平差概论[M].北京:测绘出版社,1982. [3] 李德仁,袁修孝.误差处理与可靠性理论[M].武汉:武汉 大学出版社,2002. [4] 陶本藻等.顾及系统误差的平差模型研究[J].测绘学院学 报,2002,19(2):79~81. [5] 周江文.系统误差的数学处理[J].测绘工程,1999,8 (2):1~4. [6] 周江文,黄幼才,杨元喜,欧吉坤.抗差最小二乘估计 [M].武汉:华中理工大学出版社,1997. [7] 朱建军.污染误差模型下的测量数据处理理论[J].测绘学 报,1999,28(3). [8] Huber.P.J,R obus t statis tics,New York,Wiley1981. [9] 王振杰.大地测量中不适定问题的正则化解法研究[D]. 武汉:中国科学院测量与地球物理研究所,2003. [10] 欧吉坤.测量平差中不适定问题解的统一表达与选权拟合 法[J].测绘学报,2004,33(4). [11] 叶松林,朱建军.矩阵奇异值分解与广义岭估计及其在测 量中的应用[J].中国有色金属学报,1998,8(1):160~ 164. [12] 崔希璋等.广义测量平差[M].武汉:武汉大学出版社, 2006. [13] 宋迎春.动态定位中的卡尔曼滤波研究[D].长沙:中南 大学,2007. [14] 杨元喜.自适应动态导航定位[M].北京:测绘出版社, 2006. [15] 贾永红.多源遥感影像数据融合技术[M].北京:测绘出 版社,2005. [16] 王新洲.非线性模型参数估计理论与应用[M].北京:测 绘出版社,2002. [17] 刘国林.非线性最小二乘与测量平差[M].北京:测绘出 版社,2002. [18] 朱建军等.A Bayesian method for li near inequality cons trained adjustment and i ts application to GPS posi ti oni ng[J].J ournal of Geodesy,2005,78(9):528~534. [19] 冯光财等.基于有效约束的附不等式约束平差的一种新算 法[J].测绘学报,2007,36(2):119~123. (下转第21页) 4 结束语 用激光雷达方法对国家体育馆钢架安装与滑移质量监测可行简便,精度较高,速度快,大大减少测量的外业工作量,观测数据比较全面,较好地完成了国家体育馆屋顶钢架安装与滑移的质量监测。 激光雷达数据本身就是一个空间点的数据库,不存在直观的可测量数据,很多的信息和用途需要发掘需要靠特征提取来完成。做好特征提取的算法,就能提高数据利用的精度,更好地发挥激光雷达的用途。 参考文献 [1] 刘联伟,赵资钦,梁伟雄.复杂空间结构高精度测量控制技 术[J].广东土木与建筑,2002,(5). [2] 郭祥瑞,邓晖,刘玉珠等.广州体育馆钢结构屋架安装监测 [J].华南理工大学学报,2002,30(9). [3] 马亮.广州国际会展中心预应力张弦式桁架施工测量[J]. 施工技术,2003,32(5). [4] 中华人民共和国建设部.钢结构工程施工及验收规范 (GB500205295)[S].北京:中国计划出版社,1996. [5] 范海英,杨伦等.Cyra三维激光扫描系统的工程应用研究 [J].矿山测量,2004,(3). [6] 危双丰.基于深度图像的地面激光雷达数据组织与管理研究 [D].武汉:武汉大学,2007. [7] 王晏民等.三维激光扫描精密测量古建筑大木结构[R].现 代工程测量技术发展与应用研讨交流会,2005. [8] 王晏民等.地面激光雷达与数字影像结合精密数字化保护古 建筑[C].京港澳测绘技术研讨交流会论文集,2007. [9] 王晏民等.利用三维激光扫描技术制作古建筑正摄影像图 [J].北京建筑工程学院学报,2006,(1). [10] Wang Yanmin et al.DIGITAL PRO TECTION O F HISTORIC BUILDING BY COMBINING TERESSTRIAL LID AR WITH DIGITA L I MAGE.Optical3-D Meas urement Techniques VIII, 2007. (上接第5页) [20] Peng J unhuan,et al.An Aggregate Cons traint Method for Inequality2constrained Leas t Squares Problem[J].Journal of Geodes y,2005,79(12):705~713. [21] 孙海燕等.半参数回归与模型精化[J].武汉大学学报(信 息科学版),2002,27(2):172~174. [22] 朱建军等.半参数模型解算的虚拟观测法[J].工程勘察, 2006,(9):53~58. [23] 戴吾蛟等.基于经验模式分解的滤波去噪法及其在G PS多路 径效应中的应用[J].测绘学报,2006,35(4):321~327. [24] Ziqiang https://www.doczj.com/doc/3318423061.html,parison of the Variance between L1and L2 es ti mation,ZFV,1990,(3):123~125. [25] Baarda.w.A Tes t Procedure for use in Geodetic ne https://www.doczj.com/doc/3318423061.html,h https://www.doczj.com/doc/3318423061.html,n.Vol.2,No.5,1968. [26] 朱建军.污染误差模型下的测量数据处理理论[D].长沙: 中南工业大学,1998. [27] 欧吉坤.粗差的拟准检定法[J].测绘学报,1999,28(1): 15~20. [28] Huber.P.J.Robust es timation of a location parameter,Ann. Math.Statist.1964,Vol.35,73~101.[29] 朱建军.测量平差中估计准则的统一[J].测绘学报, 1986,(4). [30] 朱建军.Robust es timate with mini mum mean squared error[J]. Australian Surveyor,1991,(2). [31] 王松佳.线性模型的理论及应用[M].合肥:安徽教育出 版社,1987. [32] 归庆明.选取岭参数的一个新方法[J].测绘工程,1997,6 (1):14~19. [33] 朱建军.岭估计的一种新的算法[J].测绘信息与工程, 1997,(3):22~25. [34] 沈云中,许厚泽.不适定方程正则化算法的谱分解式[J]. 大地测量与地球动力学,2002,22(3):10~14. [35] Peiliang X u,Yoichi Fukuda Yumei Li u.Mul tiple parameter regulariz ation:numerical solutions and applications to the determination of geopotential from precise satelli te orbits.Journal of Geodes y,2006,Vol.80,17~27. [36] 王志忠,朱建军.非线性模型中方差和协方差分量的估计 [J].测绘学报,2005,34(4):288~293. ?绪论 ?测量平差理论 ?4种基本平差方法 ?讨论点位精度 ?统计假设检验的知识 ?近代平差概论 ?绪论 §1-1观测误差 测量数据(观测数据)是指用一定的仪器、工具、传感器或其他手段获取的反映地球与其它实体的空间分布有关信息的数据,包含信息和干扰(误差)两部分。 一、误差来源 观测值中包含有观测误差,其来源主要有以下三个方面: 1. 测量仪器; 2. 观测者; 3. 外界条件。 二、观测误差分类 1. 偶然误差 定义,例如估读小数; 2. 系统误差 定义,例如用具有某一尺长误差的钢尺量距; 系统误差与偶然误差在观测过程中总是同时产生的。 3. 粗差 定义,例如观测时大数读错。 误差分布与精度指标 §2-1 正态分布 概率论中的正态分布是误差理论与测量平差基础中随机变量的基本分布。 一、一维正态分布 §2-2偶然误差的规律性 2. 直方图 由表2-1、表2-2可以得到直方图2-1和图2-2(注意纵、横坐标各表示什么?),直方图形象地表示了误差分布情况。 3. 误差分布曲线(误差的概率分布曲线) 在一定的观测条件下得到一组独立的误差,对应着一种确定的误差分布。当观测值个数的情况下,频率稳定,误差区间间隔无限缩小,图2-1和图2-2中各长方条顶边所形成的折线将分别变成如图2-3所示的两条光滑的曲线,称为误差分布曲线,随着n增大,以正态分布为其极限。因此,在以后的讨论中,都是以正态分布作为描述偶然误差分布的数学模型。 4. 偶然误差的特性 第三章协方差传播律及权 在测量实际工作中,往往会遇到某些量的大小并不是直接测定的,而是由观测值通过一定的函数关系间接计算出来的,显然,这些量是观测值的函数。例如,在一个三角形中同精度观测了3个内角L1,L2和L3,其闭合差w和各角度的平差值分别 又如图3—1中用侧方交会求交会点的坐标等。 现在提出这样一个问题:观测值函数的精度如何评定?其中误差与观测值的中误差存在怎样的关系?如何从后者得到前者?这是本章所要讨论的重要内容,阐述这种关系的公式称为协方差传播律。 § 3—1 数学期望的传播 第一章测量误差及数据处理 物理实验的任务不仅是定性地观察各种自然现象,更重要的是定量地测量相关物理量。而对事物定量地描述又离不开数学方法和进行实验数据的处理。因此,误差分析和数据处理是物理实验课的基础。本章将从测量及误差的定义开始,逐步介绍有关误差和实验数据处理的方法和基本知识。误差理论及数据处理是一切实验结果中不可缺少的内容,是不可分割的两部分。误差理论是一门独立的学科。随着科学技术事业的发展,近年来误差理论基本的概念和处理方法也有很大发展。误差理论以数理统计和概率论为其数学基础,研究误差性质、规律及如何消除误差。实验中的误差分析,其目的是对实验结果做出评定,最大限度的减小实验误差,或指出减小实验误差的方向,提高测量质量,提高测量结果的可信赖程度。对低年级大学生,这部分内容难度较大,本课程尽限于介绍误差分析的初步知识,着重点放在几个重要概念及最简单情况下的误差处理方法,不进行严密的数学论证,减小学生学习的难度,有利于学好物理实验这门基础课程。 第一节测量与误差 物理实验不仅要定性的观察物理现象,更重要的是找出有关物理量之间的定量关系。因此就需要进行定量的测量,以取得物理量数据的表征。对物理量进行测量,是物理实验中极其重要的一个组成部分。对某些物理量的大小进行测定,实验上就是将此物理量与规定的作为标准单位的同类量或可借以导出的异类物理量进行比较,得出结论,这个比较的过程就叫做测量。例如,物体的质量可通过与规定用千克作为标准单位的标准砝码进行比较而得出测量结果;物体运动速度的测定则必须通过与二个不同的物理量,即长度和时间的标准单位进行比较而获得。比较的结果记录下来就叫做实验数据。测量得到的实验数据应包含测量值的大小和单位,二者是缺一不可的。 国际上规定了七个物理量的单位为基本单位。其它物理量的单位则是由以上基本单位按一定的计算关系式导出的。因此,除基本单位之外的其余单位均称它们为导出单位。如以上提到的速度以及经常遇到的力、电压、电阻等物理量的单位都是导出单位。 一个被测物理量,除了用数值和单位来表征它外,还有一个很重要的表征它的参数,这便是对测量结果可靠性的定量估计。这个重要参数却往往容易为人们所忽视。设想如果得到一个测量结果的可靠性几乎为零,那么这种测量结果还有什么价值呢?因此,从表征被测量这个意义上来说,对测量结果可靠性的定量估计与其数值和单位至少具有同等的重要意义,三者是缺一不可的。 测量可以分为两类。按照测量结果获得的方法来分,可将测量分为直接测量和间接测量两类,而从测量条件是否相同来分,又有所谓等精度测量和不等精度测量。 根据测量方法可分为直接测量和间接测量。直接测量就是把待测量与标准量直接比较得出结果。如用米尺测量物体的长度,用天平称量物体的质量,用电流表测量电流等, 第一部分GPS静态测量第一章 GPS静态测量基础 1相对定位指的是在进行GPS定位时,多台同步接收机进行同步观测,采集同步观测数据;在数据处理时,则利用这些同步观测数据,计算出同步观测站之间的相对位置(坐标差/基线向量。) 2数据处理过程一般包括基线处理、网平差、坐标转换和高程转换,最终求出高精度的网点坐标。 3 GPS测量型接收机一般分为单频和双频两大类。单频GPS测量型接收机,接收信号:GPS 导航电文、C/A码、L1载波。双频GPS测量型接收机(双频GPS测量仪),接收信号:GPS 导航电文、C/A码伪距、P码伪距、L1载波相位、L2载波相位。 第二章 GPS静态测量工作的流程 1一般GPS静态测量工作分为三个阶段,即测前准备、玩野实施和数据处理。 2测前准备阶段的主要工作包括项目立项、技术设计、实地踏勘、设备检定、资料收集整理、人员组织等。 3测量实施的内容包括:实地了解测区情况、卫星状况预报、确定作业方案、外业观测。 4 GPS基线向量网被分成了A、B、C、D、E五个级别。 C级网为地方控制网和工程控制网;D级网为工程控制网;E级网为测图网。 5 GPS网常用的布网形式有以下几种:跟踪站式、会战式、多基准站式、同步图形扩展式、单基准站式。 跟踪站式:若干台接收机长期固定安放在测站上,进行常年、不间断的观测,即一年观测365天,一天观测24小时,这种观测方式很像是跟踪站,因此,这种布网形式被称为跟踪站式。特点:不间断的连续观测,观测时间长,数据量大,采用精密星历,成本高。 会站式:在布设GPS网时,一次组织多台GPS接收机,集中在一段不太长的时间内,共同作业。在作业时,所有接收机在若干天的时间里分别在同一批点上进行多天、长时段的同步观测,在完成一批点的测量后,所有接收机又都迁移到另外一批点上进行相同方式的观测,直至所有的网点观测完毕,这就是所谓的会站式的布网。特点:较长时间、多时段观测,可以较好地消除SA等因素,有特高的尺度精度。 多基准站式:就是有若干台接收机在一段时间里长期固定在某几个点上进行长时间的观测,这些测站称为基准站。在基准站进行观测的同时,另外一些接收机则在这些基准站周围相互之间进行同步观测。 同步图形扩展式:就是多台接收机在不同测站上进行同步观测,在完成一个时段的同步观测后,又迁移到其他的测站上进行同步观测,每次同步观测都可以形成一个同步图形。在测量过程中,不同的同步图形间一般有若干个公共点相连,整个GPS网由这些同步图形构成。 特点;扩展速度快,图形强度较高,作业方法简单。 单基准站式:又称做星形网方式,它是以一台接收机作为基准站,在某个测站上连续开机观测,其余的接收机在此基准站观测期间,在其周围流动,每到一点就进行观测,流动的基准站之间一般不要求同步,这样,流动的接收机每观测一个后四段,就与基准站间测得一 误差理论与测量平差》 ( 1 ) 正误判断。正确“ T ”,错误“ F ”。(30分) 在测角中正倒镜观测是为了消除偶然误差( )。 在水准测量中估读尾数不准确产生的误差是系统误差( )。 如果随机变量 X 和 Y 服从联合正态分布,且 X 与Y 的协方差为0 ,则X 与Y 相互独立 ( )。 观测值与最佳估值之差为真误差( )。 系统误差可用平差的方法进行减弱或消除( )。 权一定与中误差的平方成反比( )。 间接平差与条件平差一定可以相互转换( )。 在按比例画出的误差曲线上可直接量得相应边的边长中误差( )。 对同一量的 N 次不等精度观测值的加权平均值与用条件平差所得的结果一定相同 ( )。 无论是用间接平差还是条件平差, 对于特定的平差问题法方程阶数一定等于必要观 测数( )。 对于特定的平面控制网,如果按条件平差法解算,则条件式的个数是一定的,形式 是多样的( )。 观测值L 的协因数阵Q LL 的主对角线元素 Q ii 不一定表示观测值 L i 的权( )。 当观测值个数大于必要观测数时,该模型可被唯一地确定( )。 定权时b 0可任意给定,它仅起比例常数的作用( )。 设有两个水平角的测角中误差相等, 则角度值大的那个水平角相对精度高( )。 用“相等”或“相同”或“不等”填空( 8 分)。 1. 1. 2. 3. 4. 5. 6. 7. 8. 9. 10 11 12 13 14 15 16 P D = ( ) 则还需增加的 已知两段距离的长度及其中误差为 300.158m ±3.5cm; 600.686m ±3.5cm 。则: 1 .这两段距离的中误差( )。 2 .这两段距离的误差的最大限差( )。 3 .它们的精度( )。 4 .它们的相对精度( )。 17 . 选择填空。只选择一个正确答案( 25 分)。 1 .取一长为 d 的直线之丈量结果的权为 1 ,则长为 D 的直线之丈量结果的权 a ) d/D b ) D/d c ) d 2 /D 2 d ) D 2 /d 2 2. 有一角度测 20 测回,得中误差± 0.42 秒,如果要使其中误差为± 0.28 秒, 测回数 N= ( )。 a ) 25 b ) 20 c) 45 d) 5 3. 某平面控制网中一点 P , 其协因数阵为: Q Q xx Q xy 0.5 0.25 Q XX Q yx yx Q yy 0.25 0.5 2 单位权方差 0 = ±2.0 。则 P 点误差椭圆的方位角 T=( )。 a ) 90 b ) 135 c ) 120 d ) 45 4. 设L 的权为1,则乘积4L 的权P= ( )o 第一章 测量误差及数据处理的基本知识 物理实验离不开对物理量的测量。由于测量仪器、测量方法、测量条件、测量人员等因素的限制,测量结果不可能绝对准确。所以需要对测量结果的可靠性做出评价,对其误差范围作出估计,并能正确地表达实验结果。 本章主要介绍误差和不确定度的基本概念,测量结果不确定度的计算,实验数据处理和实验结果表达等方面的基本知识。这些知识不仅在每个实验中都要用到,而且是今后从事科学实验工作所必须了解和掌握的。 1.1 测量与误差 1.1.1测量 物理实验不仅要定性的观察物理现象,更重要的是找出有关物理量之间的定量关系。因此就需要进行定量的测量。测量就是借助仪器用某一计量单位把待测量的大小表示出来。根据获得测量结果方法的不同,测量可分为直接测量和间接测量:由仪器或量具可以直接读出测量值的测量称为直接测量。如用米尺测量长度,用天平称质量;另一类需依据待测量和某几个直接测量值的函数关系通过数学运算获得测量结果,这种测量称为间接测量。如用伏安法测电阻,已知电阻两端的电压和流过电阻的电流,依据欧姆定律求出待测电阻的大小。 一个物理量能否直接测量不是绝对的。随着科学技术的发展,测量仪器的改进,很多原来只能间接测量的量,现在可以直接测量了。比如车速的测量,可以直接用测速仪进行直接测量。物理量的测量,大多数是间接测量,但直接测量是一切测量的基础。 一个被测物理量,除了用数值和单位来表征它外,还有一个很重要的表征它的参数,这便是对测量结果可靠性的定量估计。这个重要参数却往往容易为人们所忽视。设想如果得到一个测量结果的可靠性几乎为零,那么这种测量结果还有什么价值呢?因此,从表征被测量这个意义上来说,对测量结果可靠性的定量估计与其数值和单位至少具有同等的重要意义,三者是缺一不可的。 1.1.2 误差 绝对误差 在一定条件下,某一物理量所具有的客观大小称为真值。测量的目的就是力图得到真值。但由于受测量方法、测量仪器、测量条件以及观测者水平等多种因素的限制,测量结果与真值之间总有一定的差异,即总存在测量误差。设测量值为N ,相应的真值为N 0,测量值与真值之差ΔN ΔN =N -N 0 称为测量误差,又称为绝对误差,简称误差。 误差存在于一切测量之中,测量与误差形影不离,分析测量过程中产生的误差,将影响降低到最低程度,并对测量结果中未能消除的误差做出估计,是实验测量中不可缺少的一项重要工作。 相对误差 绝对误差与真值之比的百分数叫做相对误差。用E表示: %1000 ??=N N E 由于真值无法知道,所以计算相对误差时常用N代替0N 。在这种情况下,N可能是公认 值,或高一级精密仪器的测量值,或测量值的平均值。相对误差用来表示测量的相对精确度,相对误差用百分数表示,保留两位有效数字。 1.1.3 误差的分类 第2章 测量误差理论及数据处理 2.1 测量误差的基本概念 教学目的 1.掌握测量误差的分类,随机误差、系统误差、粗大误差的概念和来源。 2.了解准确度、精密度、精确度,及它们与系统误差、随机误差、总误差的关系。 教学重点及难点 1. 根据误差的性质,将测量误差分为随机误差、系统误差、粗大误差三类,给出了这三类误差的概念和来源。 2.与测量结果有关的三个术语:准确度、精密度、精确度,及它们与系统误差、随机误差和总误差的关系。 教学方式:讲授 教学过程: 2.1.1 测量误差的定义.分类 根据测量误差的性质,测量误差可分为随机误差、系统误差、粗大误差三类。 1.随机误差 随机误差的定义:在同一测量条件下(指在测量环境、测量人员、测量技术和测量仪器都相同的条件下),多次重复测量同一量值时(等精度测量),每次测量误差的绝对值和符号都以不可预知的方式变化的误差,称为随机误差 随机误差的产生原因:对测量值影响微小但却互不相关的大量因素共同造成。这些因素主要是噪声干扰、电磁场微变、零件的摩擦和配合间隙、热起伏、空气扰动、大地微震、测量人员感官的无规律变化等。 随机误差的新定义:随机误差(i δ)是测量结果i x 与在重复性条件下,对同一被测量进行无限多次测量所得结果的平均值x 之差。即 i i x x δ=- (3-1) ∑==+++=n i i n x n n x x x x 1211 (n →∞) (3-2) 定义的意义:随机误差是测量值与数学期望之差,它表明了测量结果的分散性 随机误差愈小,精密度愈高。 2.系统误差 系统误差的定义:在同一测量条件下,多次测量重复同一量时,测量误差的绝对值和符号都保持不变,或在测量条件改变时按一定规律变化的误差,称为系统误差。 系统误差是由固定不变的或按确定规律变化的因素造成的,这些因素主要有: 1) 测量仪器方面的因素:仪器机构设计原理的缺点;仪器零件制造偏差和安装不正确;电路的原理误差和电子元器件性能不稳定等。如把运算放大器当作理想运放,而被忽略的输入阻抗、输出阻抗等引起的误差。 2) 环境方面的因素:测量时的实际环境条件(温度、湿度、大气压、电磁场等)对标准环境条件的偏差,测量过程中温度、湿度等按一定规律变化引起的误差。 3) 测量方法的因素:采用近似的测量方法或近似的计算公式等引起的误差, 技术专题 编者按 本刊2009年第6期刊登了 信息化测绘时代的工程测量技术发展 技术专题综述部分和数据获取部分的两篇论文,在读者中引起强烈反响,大家对该专题后续论文的刊出给予了期待。本期以 数据处理与管理 部分为重点,向读者奉献3篇论文: 现代测量平差与数据处理理论的进展 (由中南大学朱建军教授等撰写)、 工程数据库的发展要素与建设 (由建设综合勘察研究院黄坚研究员等撰写)和 工程测量标准体系的构建与发展 (由中国有色金属工业西安勘察设计研究院郭渭明教授等撰写),分别从现代测量平差与数据处理理论、工程数据库、工程测量标准体系三个方面论述了 数据处理与管理 的基础理论、技术方法和发展趋势等。同时,本期还刊登 综述 部分之 工程测量在信息化测绘战略跨越中的拓展 (由北京城建勘测设计研究院秦长利教授撰写)和 典型应用 部分之 激光雷达国家体育馆屋顶钢结构安装滑移质量监测 (由北京建筑工程学院王晏民教授等撰写)。前者对在信息化测绘战略跨越中工程测量采用卫星定位测量、摄影测量、GIS、大型工程精密工程测量、轨道交通精密施工测量和变形监测等技术和方法及其应用成果进行了论述;后者探讨了激光雷达技术应用于国家体育馆屋顶钢结构安装与质量监测的作业流程、特征数据提取及精度分析等。 现代测量平差与数据处理理论的进展 朱建军,宋迎春 (中南大学信息物理工程学院,长沙 410083) 摘要:本文首先简述了现代测量平差中的各种理论与经典测量平差之间的关系,指出现代测量平差与数据处理理论仍然是以高斯-马尔柯夫模型为核心,通过该模型在不同层面上的扩充、发展形成了若干新理论、新方法,并以图描述了经典测量与现代测量数据处理中各种理论之间的关系。然后分别阐述了现代测量数据处理中粗差理论、系统误差的处理、病态问题的处理、非线性问题的处理、不等式约束的平差等的发展,最后综述了其他数据处理理论的一些发展情况。 关键词:经典测量平差;现代测量平差;高斯-马尔柯夫误差模型;误差模型扩展 中图分类号:P207文献标识码:B Progress of modern surveying adjustment and theory of data processing Zhu Jianjun,Song Yingchun (School of Geomatics,Central South Unive rsity,Chan gsha 410083,China) Abstract:This paper described the relationship between the theories in modern surveying adjustment and the traditional surveying adjustment.It pointed out that the theories of modern surveying adjustment and the data processing should be still based on Gauss-Markov error model.Through enlarge ment and development in different aspects of the model,ne w theories and methods are worked out.A figure showing such relationship is given. Meanwhile,the theories on blunder detec tion,systematic error processing,il-l pose problem,nonlinear model, inequality constraints are elaborated.At the last the progresses of other theories on data processing are summarized. Key words:traditional surveying adjustment;modern surveying adjustment;Gauss-Markov error model; e xtension o f error model 收稿日期:2009-09-28 作者简介:朱建军(1962-),男(汉族),湖南双峰人,博士,教授. 1 A C h 3 现代测量数据处理理论 1、如下图所示,有2个已知高程点A 、B ,3个待定高程点C 、D 、E 和6个独立高差观测值,为三等水准测量,其1km 观测高差中误差0.3 0±=σmm 。A 和B 点的高程、观测高差和相应水准路线的长度见表,试进行稳健估计。 线路号 观测高差/m 线路长度/km 已知点高程/m h 1 12.705 1.1 H A =788.135 H B =811.920 h 2 11.094 2.3 h 3 6.518 0.8 h 4 4.570 1.5 h 5 -4.225 2.0 h 6 15.302 1.9 2、如图所示水准网中,有2个已知高程点A 、B ,3个待定高程点C 、D 、E 和8个高差观测值。A 和B 点的高程、观测高差和相应水准路线的长度见表,为三等水准测量,其1km 观测高差中误差0σ=±3.0mm ,观测值中不含粗差。1h 、2h 、3h 、4h 、5h 是2002年观测的,6h 、7h 、8h 是2006年观测的,设C 、D 、E 点每年的沉降量为1y 、2y 、3y ,试按附有系统参数模型平差之。 高差观测值与起算数据表 线路号 观测高差/m 线路长度/km 已知点高程/m h 1 1.215 3.1 H A =10.210 H B =12.283 h 2 -1.062 2.8 h 3 -2.166 2.5 h 4 -2.311 1.9 h 5 0.150 2.4 h 6 0.135 2.7 H 7 -2.029 1.5 H 8 0.953 2.1 3、如图所示水准网,C B A 、、点全为待定点,同精度独立高差观测值为1h =12.345m ,2h =3.478m ,3h =-15.817m ,平差时选取C B A 、、三个待定点的高程平差值3 21???X X X 、、为参数估值,并取近似值 现代大地测量学论文 几种创新大地测量数据处理理论与方法概述 现代测量平差与数据处理理论发展概述经典的测量平差与数据处理是以高斯-马尔柯夫模型为核心: L AX =+? (1a) ()0E ?=,2()D σ?=,21Q P σ-=? (1b) ()Rnk A n =, ()()R Q R P n == (1c) 这里L 为观测向量,?为误差向量,X 为未知参数向量,A 为X 的系数矩阵,()E 为数学期望,2σ为单位权方差,P 为观测权矩阵,Q 为协因素矩阵,n 为观测个数。现代测量平差与数据处理理论仍然是以高斯-马尔柯夫模型为核心,通过该模型在不同层面上的扩充、发展形成了若干新理论、新方法。各种现代平差理论与方法与经典平差模型的关系可以描述如图1所示【1】 图1 各种现代平差理论与方法与经典平差模型的关系图 1.测量平差主要发展状况概述 测量平差估计准则的发展:高斯最小二乘理论的发展,相关平差理论的发展,极大验后估计准则,稳健估计的准则,统计决策的基本概念,容许性的概念。 测量平差数据质量评估及质量控制理论的发展:经典的数据质量评估与质量控制理论,现代的方差协方差估计理论的发展,赫尔黙特方差估计理论,二次无偏估计法,方差分量的Bayes 理论,方差估计的精度评定。 稳健估计主要介绍:稳健估计理论的发展,污染误差模型构成,污染误差模型在测量数据处理中的具体形式,稳健性度量的概念,各种稳健性度量准则,影响函数的定义,影响函数的确定。稳健估计的种类,稳健的M 估计的原理,选权迭代法的基本原理,测量中常用的几种选权迭代法,均方误差最小的稳健估计,污染误差模型下的测量数据处理理论。一次范数最小的估计,一范最小估计的性质,一范最小估计的算法(线性规划法,迭代法),P 范最小的原理,算法。粗差探测的理论,data-snooping 的原理和方法,可靠性理论(内可靠性,外可靠性),稳健估计理论在测量中的应用及发展现状。 时间序列数据处理的理论发展:实时动态数据的处理概况,动态数据的卡尔曼滤波(动态模型的建立,滤波),动态数据的预报,动态数据的平滑,随机过程与时间序列的概念,平稳随机过程和平稳时间序列,时间序列的随机线性模型平稳自回归模型,平稳自回归可逆滑动平均混合模型,线性模型的自 电子测量技术 课程报告 班级 姓名 XXX 专业 学号 任课教师 郑州科技学院电气工程学院 二〇一五年十月 1 课程的目的和意义 (1) 2 主要研究内容和研究方法 (1) 2.1 主要研究内容 (1) 2.2 应用领域及研究方法 (2) 2.2.1 应用领域 (2) 2.2.2 研究方法 (2) 3 国内外的发展状况 (3) 3.1 国内发展现状 (3) 3.2 国外发展现状 (4) 4 我国电子测量技术的不足 (4) 5 中国的高科技测量设备仪器 (5) 5.1 二次元测试仪 (5) 5.2 信号分析仪 (6) 6 电子测量技术的发展趋势 (7) 7 常用电子测量仪器的使用方法 (8) 7.1 熟悉掌握的电子测量仪器 (8) 7.1.1 示波器 (8) 7.1.2 钳型电流表 (8) 7.2 最有用的电子测量仪器 (10) 7.2.1 万用表 (10) 7.2.2 频谱分析仪 (10) 总结 (12) 参考文献 (13) 1课程的目的和意义 通过本课程的学习,培养我们具有电子测量技术和仪器方面的基础知识和应用能力;可开拓学生思路,培养综合应用知识能力和实践能力;培养我们严肃认真,求实求真的科学作风,为后续课程的学习和从事研发工作打下基础。 (1)掌握测量误差基本理论,能进行测量误差分析和数据处理; (2)掌握电路参数、波形、电压、频率(时间)、功率(电能)、频域及数域测量的基本原理和方法; (3)了解电测中常用电工仪表、常用电子仪器的基本原理; (4)掌握常用电工仪表、常用电子仪器的使用方法; (5)对国内外电子测量新技术的发展有所了解。 课程的意义:从某种意义上来说,近代科学技术的水平是由电子测量的水平来保证和体现的,电子测量水平是衡量一个国家科学水平的重要标志之一。 (1)日常生活中处处离不开测量; (2)科学的进步和发展离不开测量,离开测量就不会有真正的科学; (3)生产发展离不开测量; (4)在高新技术和国防现代化建设中则更是离不开测量。 2主要研究内容和研究方法 2.1主要研究内容 随着电子技术的不断发展,测量研究的内容愈来愈多,按照测量仪器的功能,电子测量仪器主要研究内容可分为专用和通用两大类。 专用电子测量仪器是为特定的目的而专门设计制作的,适用于特定对象的测量。例如:光纤测试仪器专用于测试光纤的特性;通信测试仪器专用于测试通信线路及通信过程中的参数。 通用电子测量仪器是为了测量某一个或某一些基本电参量而设计的,适用于多种电子测量。按其功能又可细分为以下几类: (1)信号发生器:用来提供各种测量所需的信号,根据用途不同,又有不同波形、不同频率范围和各种功率的信号发生器,如低频信号发生器、高频信号发生器、函数信号发生器、脉冲信号发生器、任意波形信号发生器和射频合成信号发生器。 (2)电压测量仪器:用来测量电信号的电压、电流、电平等参量,如电流表、电压 误差理论与数据处理 实验报告 姓名:黄大洲 学号:3111002350 班级:11级计测1班 指导老师:陈益民 实验一 误差的基本性质与处理 一、实验目的 了解误差的基本性质以及处理方法 二、实验原理 (1)算术平均值 对某一量进行一系列等精度测量,由于存在随机误差,其测得值皆不相同,应以全部测得值的算术平均值作为最后的测量结果。 1、算术平均值的意义:在系列测量中,被测量所得的值的代数和除以n 而得的值成为算术平均值。 设 1l ,2l ,…,n l 为n 次测量所得的值,则算术平均值 121...n i n i l l l l x n n =++==∑ 算术平均值与真值最为接近,由概率论大数定律可知,若测量次数无限增加,则算术平均值x 必然趋近于真值0L 。 i v = i l -x i l ——第i 个测量值,i =1,2,...,;n i v ——i l 的残余误差(简称残差) 2、算术平均值的计算校核 算术平均值及其残余误差的计算是否正确,可用求得的残余误差代数和性质来校核。 残余误差代数和为: 1 1 n n i i i i v l nx ===-∑∑ 当x 为未经凑整的准确数时,则有:1 n i i v ==∑0 1)残余误差代数和应符合: 当 1n i i l =∑=nx ,求得的x 为非凑整的准确数时,1 n i i v =∑为零; 当 1n i i l =∑>nx ,求得的x 为凑整的非准确数时,1 n i i v =∑为正;其大小为求x 时 的余数。 当 1n i i l =∑ 物理实验中的测量误差与数据处理方法总结 物理实验中的测量误差与数据处理方法总结 作者:石皓昆李珩 指导教师:邓靖武 2014年4月17日 摘要:在学习物理的过程中,学习进行物理实验是不可忽略的一步。在笔者参加学校在北京大学物理实验教学中心学习的过程中,发现在实验结果处理中,应用了许多高中没有出现的方法。我们在这里对我们使用过、遇到过的方法进行总结。 关键词:基础物理实验误差分析不确定度数据处理 目录 一、引言 二、正文 1、测量误差与测量结果的不确定度 2、测量结果的书写规则 3、对测量数据进行处理的几种方法 三、结尾 一、引言:本文着重总结了测量误差与数据处理的几种方法,其中测量误差理论是重中之重。笔者认为进行一项物理实验始终与误差理论有密切的关系,不断减小测量误差即使我们进行试验时不断需要考虑的问题,亦可以帮助我们正确、有效地设计实验方案、进行实验操作、正确处理数据。 二、正文 1、测量误差与测量结果的不确定度 ①测量误差的定义 首先,需要明确测量误差的定义。当我们进行测量时,由于理论的近似性、实验仪器的局限性等,测量结果总不可能绝对准确。待测物理量的真值同我们的测量值之间总会存在某种差异。我们将测量误差定义为 测量误差=测量值-真值 ②测量误差的分类 其次,按照习惯的分类方法,根据误差的性质,误差又分为系统误差和随机误差。 ③系统误差 我们在这里讨论系统误差。系统误差指的是在相同条件下,多次测量同一物理量时,测量值对真值的偏离总是相同的误差。其造成原因大概分为三类:(1)、实验理论、计算公式的局限性(例:测量单摆周期中使用在摆角趋于0 的情况下的周期公式) (2)、仪器的使用问题 (3)、测量者的生理心理因素的影响 (4)、未定系统误差(例如仪器的允差) ④随机误差 与系统误差相对应,随机误差是由于偶然的、不确定的因素造成每一次测量值的无规律的涨落,这类误差我们称作随机误差。 随机误差的特点在于它的随机性。即如果在相同宏观条件下,对某一物理量进行多次测量,每次的测量结果都不相同。但当测量次数足够多时,我们一般认为大多数的随机误差近似符合正态分布。 不妨记随机误差为连续型随机变量x,其概率密度函数为(x) ρ。由“概率论”中对于随机变量的数字特征的定义 数学期望 ()() E x x x dx ρ +∞ -∞ =? 方差 2 D()[()]() x x E x x dx ρ +∞ -∞ =- ? 正态分布的概率密度函数 2 2 2 (x) x σ ρ- =(1.1) 《误差理论与测量平差基础》期末考试试题A(参考答案) 一、名词解释(每题2分,共10分) 1、偶然误差 ——在相同的观测条件系作一系列的观测,如果误差在大小和符号上都表现出偶然性。即从单个误差看,该误差的大小和符号没有规律性,但就大量误差的总体而言,具有一定的统计规律。这种误差称为偶然误差。 2、函数模型线性化 ——在各种平差模型中,所列出的条件方程或观测方程,有的是线性形式,有的是非线性形式。在进行平差计算时,必须首先把非线性形式的函数方程按台劳公式展开,取至一次项,转换成线性方程。这一转换过程,称之为函数模型的线性化。 3、点位误差椭圆 ——以点位差的极大值方向为横轴X 轴方向,以位差的极值F E 、分别为椭圆的长、短半轴,这样形成的一条椭圆曲线,即为点位误差椭圆。 4、协方差传播律 ——用来阐述观测值的函数的中误差与观测值的中误差之间的运算规律的数学公式。如 0K KL Z +=,若观测向量的协方差阵为LL D ,则按协方差传播律,应有T LL ZZ K KD D =。 5、权 ——表示各观测值方差之间比例关系的数字特征,220 i i P σσ=。 二、判断正误(只判断)(每题1分,共10分) 参考答案:X √X √X X X √√X 三、选择题(每题3分,共15分) 参考答案:CCDCC 四.填空题(每空3分,共15分) 参考答案:1. 6个 2. 13个 3.1/n 4. 0.4 5. 0) () () () (432 00 2 0=''+?+?+-''+ -''- W y S X X x S Y Y C AC A C C AC A C ρρ,其中 AB A C A C X X Y Y W αββ-++--=''4300arctan 五、问答题(每题4分,共12分) 1. 几何模型的必要元素与什么有关?必要元素数就是必要观测数吗?为什么? 答:⑴几何模型的必要元素与决定该模型的内在几何规律有关;(1分) ⑵必要元素数就是必要观测数;(1分) ⑶几何模型的内在规律决定了要确定该模型,所必须具备的几何要素,称为必要元素,必要元素的个数,称为必要元素数。实际工程中为了确定该几何模型,所必须观测的要素个数,称为必要观测数,其类型是由必要元素所决定的,其数量,必须等于必要元素的个数。(2分) 2. 简述偶然误差的特性 答:⑴在一定条件下,误差绝对值有一定限值。或者说,超出一定限值的误差,其出现概率为零;(1分) 工程测量毕业论文 Prepared on 24 November 2020 郑州大学毕业论文 题目:测量平差理论及在检测中的应用指导教师:赫晓慧职称:副教授学生姓名:张浩学号: 专业:工程测量技术 院(系):佛罗里达国际学院 完成时间: 2013年4月19号 2013年 4 月 19 日 目录 测量不确定度的评定步骤 1 1 1 1 2 2 4 4 5 5 7 8 9 摘要 测量平差是测绘类各专业的一门重要专业课,是测绘学科中测量数据处理方法 重要的组成部分。通过引入测量平差理论求得观测量的最可靠结果并检验测量成果的精度.论文以村庄居民地为研究,对测量结果进行不确定度分析.因为即使经过对已确定的 系统误差的修正,仍只是测量值的一个估计值。测量平差的任务就是对在一些带有偶然 误差的观测值,按最小二乘原理,消除各观测值之间的不符值,合理地配赋误差,求出 未知量的最可靠值。运用合理的方法来评定测量成果的精度。 关键词:测量平差测量不确定因素误差分类 Abstract Measuring adjustment is an important course of various kinds of surveying and mapping, surveying and mapping is discipline in the important part of the measurement data processing method. Obtained by introducing the theory of measurement adjustment of observation of the most reliable results and test the accuracy of measurement results. As the research papers on village residents, uncertainty analysis of measurement results. Because even after the established system error correction, is still only an estimate of measurement value of. Task of measuring adjustment is in some observations with accidental error, according to the least squares principle, eliminate the discrepancy between the observed value, reasonable assignment of match error, the most reliable values of an unknown quantity. Reasonable use of methods to assess the accuracy of the measurement results. Key Words:survey adjustment ;Measurement uncertainty ; Error classification 1 绪论 测量平差理论的发展 经典平差理论的发展 主要介绍高斯创立最小二乘原理和马尔可夫创立高斯-马尔可夫平差模型的历史背景和过程。 近代平差理论的发展 湖北省高等教育自学考试课程考试大纲 课程名称:测量平差计算课程代码:01552 第一部分课程性质与目标 一、课程性质与特点 本课程是工程测量技术专业的一门专业基础必修课,是以误差理论、最小二乘原理对测量外业观测的数据作数学分析,并评定其精度的一门学科。 二、课程目标与基本要求 本课程的教学目的是使学生掌握数据处理理论,研究数据处理理论在测量中的应用,了解测量数据处理的研究成果、发展动态,培养学生的研究能力。使学生能够用经典的误差理论和比较前沿的数据处理方法进行合理的平差解算,以巩固和加强学生对误差理论和现代测量数据处理方法的理解,增强学生用所学的理论方法解决实际问题的能力。 学生通过学习本课程,应达到以下基本要求: 1、了解测量平差的基本概念,基本原理,基本知识和基本内容; 2、基本掌握测量误差分析和处理的基本方法及应用; 3、掌握条件平差、间接平差的基本原理和应用方法; 4、基本掌握各类平差软件的特点及应用。 三、与本专业其他课程的关系 学习本课程前,学生需要先修《实用测量技术》、《高等数学》,《计算机应用基础》树立学生在测量基础原理、方法技术以及数学计算的基本理念和思想,同时本课程也为后续课程《控制测量》、《测量程序应用》、《GPS定位技术应用》专业课程的学习打下坚实基础。 第二部分考核内容与考核目标 第一章绪论 一、学习目的与要求 1.掌握观测误差的基本概念; 2.了解观测误差产生的原因,懂得观测误差在测量过程中是不可避免的这一事实; 3.掌握偶然误差、系统误差及粗差的定义; 4.了解测量平差的研究对象和任务。 二、考核知识点与考核目标 (一)误差的分类(重点) 识记:系统误差和偶然误差的概念 理解:系统误差和偶然误差特点 应用:辨别系统误差和偶然误差 (二)误差产生的原因(次重点) 理解:误差产生的三大原因 (三)测量平差的任务和内容(一般) 识记:测量平差的任务和内容 第二章误差分布与精度指标 一、学习目的与要求 (1)掌握偶然误差的统计规律性; (2)掌握衡量精度的指标。 二、考核知识点与考核目标 (一)偶然误差的规律性(重点) 识记:偶然误差的概念 理解:误差正态分布曲线 应用:偶然误差的统计规律性 (二)衡量精度的指标(次重点) 识记:衡量精度指标的概念 理解:精度的含义 应用:计算中误差、相对中误差和限差 第三章协方差传播律及权 一、学习目的与要求 1.掌握协方差与协方差传播律; 2.掌握权与定权的常用方法; 第一章测量误差及数据处理的基本知识 物理实验离不开对物理量的测量。由于测量仪器、测量方法、测量条件、测量人员等因素的限制,测量结果不可能绝对准确。所以需要对测量结果的可靠性做出评价,对其误差范围作出估计,并能正确地表达实验结果。 本章主要介绍误差和不确定度的基本概念,测量结果不确定度的计算,实验数据处理和实验结果表达等方面的基本知识。这些知识不仅在每个实验中都要用到,而且是今后从事科学实验工作所必须了解和掌握的。 1.1 测量与误差 1.1.1测量 物理实验不仅要定性的观察物理现象,更重要的是找出有关物理量之间的定量关系。因此就需要进行定量的测量。测量就是借助仪器用某一计量单位把待测量的大小表示出来。根据获得测量结果方法的不同,测量可分为直接测量和间接测量:由仪器或量具可以直接读出测量值的测量称为直接测量。如用米尺测量长度,用天平称质量;另一类需依据待测量和某几个直接测量值的函数关系通过数学运算获得测量结果,这种测量称为间接测量。如用伏安法测电阻,已知电阻两端的电压和流过电阻的电流,依据欧姆定律求出待测电阻的大小。 一个物理量能否直接测量不是绝对的。随着科学技术的发展,测量仪器的改进,很多原来只能间接测量的量,现在可以直接测量了。比如车速的测量,可以直接用测速仪进行直接测量。物理量的测量,大多数是间接测量,但直接测量是一切测量的基础。 一个被测物理量,除了用数值和单位来表征它外,还有一个很重要的表征它的参数,这便是对测量结果可靠性的定量估计。这个重要参数却往往容易为人们所忽视。设想如果得到一个测量结果的可靠性几乎为零,那么这种测量结果还有什么价值呢?因此,从表征被测量这个意义上来说,对测量结果可靠性的定量估计与其数值和单位至少具有同等的重要意义,三者是缺一不可的。 1.1.2 误差 绝对误差在一定条件下,某一物理量所具有的客观大小称为真值。测量的目的就 是力图得到真值。但由于受测量方法、测量仪器、测量条件以及观测者水平等多种因素的限制,测量结果与真值之间总有一定的差异,即总存在测量误差。设测量值为N,相应的真值为N0,测量值与真值之差ΔN ΔN=N-N0 称为测量误差,又称为绝对误差,简称误差。 误差存在于一切测量之中,测量与误差形影不离,分析测量过程中产生的误差,将 2017年博士研究生入学考试《现代平差与数据处理》考试大纲 考试形式和试卷结构 一、试卷满分及考试时间 试卷满分为100分,考试时间为180分钟. 二、答题方式 答题方式为闭卷、笔试. 三、参考书目 1. 崔希璋,於宗俦,陶本藻,刘大杰,等.广义测量平差(第二版),武汉大学出版社,2009. 2.陶本藻.测量数据处理的统计理论和方法.测绘出版社,2007. 3.刘国林,赵长胜,张书毕,等.近代测量平差理论与方法,中国矿业大学出版社,2012. 考试内容和考试要求 一、估计方法和广义测量平差原理 考试内容 多维正态分布的定义和性质、条件概率密度;极大似然估计的性质、推导;最小二乘估计;极大验后估计的性质、推导;最小方差估计;广义测量平差原理。 考试要求 1.掌握条件概率密度的性质。 2.重点掌握极大似然估计的公式推导。 3.重点掌握极大验后估计的公式推导。 4.掌握最小方差估计的公式推导。 5. 掌握广义测量平差的基本原理。 二、最小二乘平差的统一理论和方法 考试内容 秩亏自由网平差、附加系统参数的自由网平差、极大验后滤波与推估、最小二乘配置和静态逐次滤波的基本原理,广义G-M模型下的精度和统计性质问题,向量空间理论中的平差问题。 考试要求 1.重点掌握秩亏自由网平差方法。 2.掌握附加系统参数的自由网平差的运用。 3.掌握极大验后滤波与推估的公式推导。 4.掌握最小二乘配置的原理。 5. 掌握向量空间理论中的平差问题。 三、平差随机模型的验后估计 考试内容 赫尔默特方差估计和方差-协方差分量估计的基本原理。 考试要求 1.重点掌握赫尔默特方差估计的原理和运用。 2.掌握方差-协方差分量估计的原理 3.掌握方差分量估计中精度评定的原理。 四、稳健估计和有偏估计 考试内容 稳健估计的基本理论,有偏估计的基本理论和方法考试要求 1.稳健性的基本概念和数学描述。 2.位置参数的稳健估计。 3. 岭估计和广义岭估计的基本理论和方法。测量平差知识大全
测量误差及数据处理.
GPS测量操作与数据处理复习资料
误差理论和测量平差试题+答案
测量误差及数据处理的基本知识
测量误差理论及数据处理
现代测量平差与数据处理理论的进展
现代测量数据处理理论试卷
几种创新大地测量数据处理理论与方法概述
电子测量报告.(DOC)
误差理论与数据处理实验报告要点
物理实验中的测量误差与数据处理方法总结
《误差理论与测量平差基础》试卷A(答案)
工程测量毕业论文
测量平差计算
测量误差及数据处理的基本知识.
2017年博士研究生入学考试现代平差与数据处理考试大纲
相关主题
文本预览