
励磁系统中的各种定值介绍
一、励磁系统中各种定值的分类
励磁系统中的各种整定值主要是在励磁调节器(AVR)中。本次重点介绍励磁调节器中的定值。
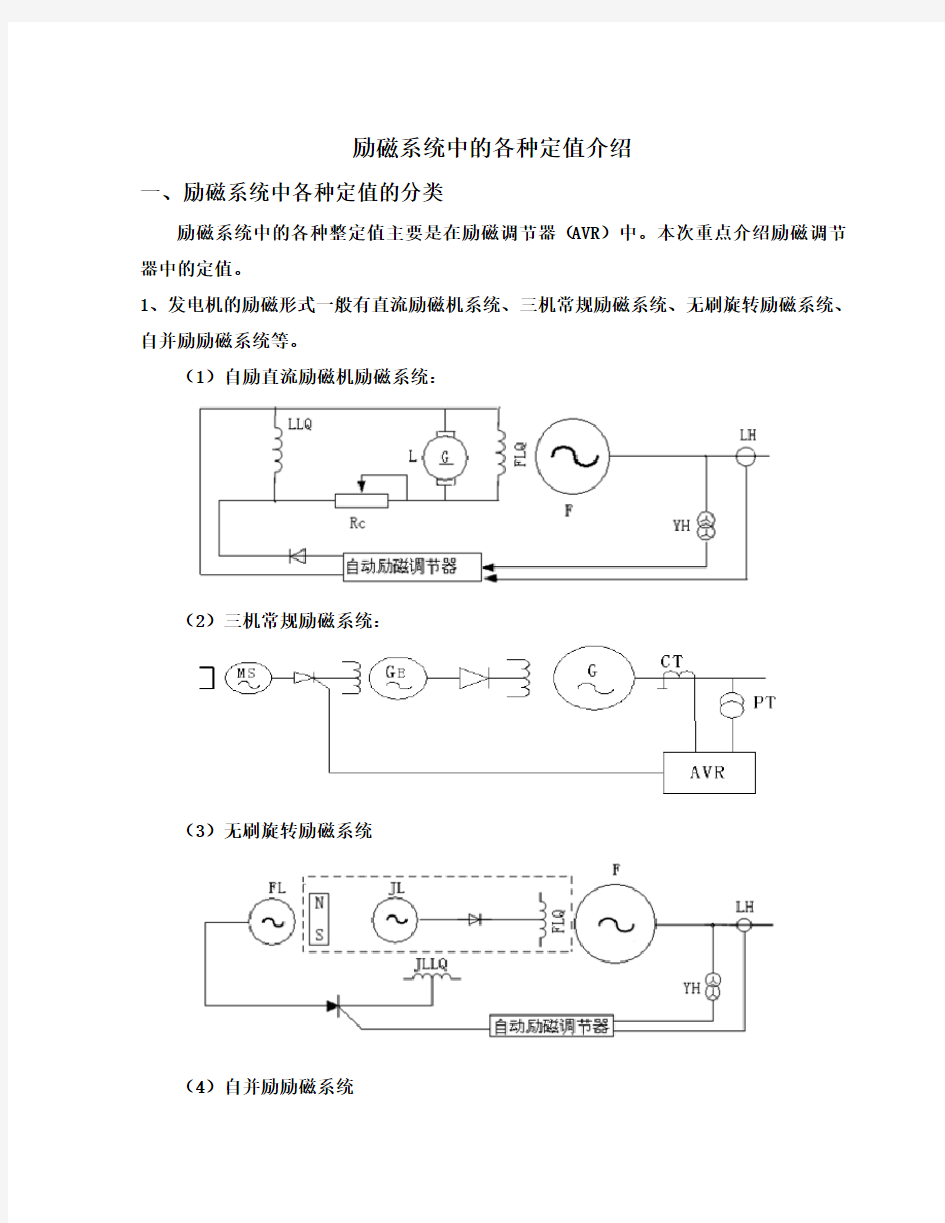
1、发电机的励磁形式一般有直流励磁机系统、三机常规励磁系统、无刷旋转励磁系统、自并励励磁系统等。
(1)自励直流励磁机励磁系统:
(2)三机常规励磁系统:
(3)无刷旋转励磁系统
(4)自并励励磁系统
2、华北电网各个电厂所用的励磁调节器有吉思GEC系列、南瑞电控SAVR2000系列、NES5100系列、SJ800系列、洪山的HJT系列、ABB公司的UN5000系列、GE公司的EX2100系列、英国R-R的TMR-AVR、日本三菱等。
各个厂家的励磁调节器中的定值数量各不相同。少的几十个(如吉思、南瑞),多的上千个(如ABB、GE)。
3、针对各种励磁调节器中的定值按照使用功能可以分为
(1)控制定值(控制参数)
控制定值包括自动方式控制参数、手动方式控制参数、PSS控制参数、低励限制控制参数、过励限制控制参数、过激磁限制控制参数等
(2)限制动作定值
包括过励限制动作定值、过激磁限制动作定值、低励限制动作定值等
(3)其他定值
包括励磁调节器模拟量测量的零飘修正、幅值修正、励磁方式定义、起励时间设定、调压速度设定、调差率等。
励磁调节器部的控制参数
励磁调节器作为发电机的一种自动控制装置。在正常运行或限制动作时,用来控制发电机的运行工况不超过正常运行围的参数。这些参数在运行中,是时刻发挥作用的。控制参数整定的合理,直接影响整个励磁系统的动态特性的好坏及各种限制功能的正常发挥作用。
一、自动方式下的控制参数(电压闭环)
1、自动方式是以机端电压作为控制对象的控制方式,是励磁调节器正常的工作方式。也是调度严格要求必须投入的运行方式。
华北电网调度部门下发的《华北电网发电机励磁系统调度管理规定》中规定:
(1)各发电厂机组自动励磁调节装置正常应保持投入状态,其投入、退出和参数更改条件应在运行规程中作出规定,并应得到调度部门和技术监督部门的批准。调度部门要求投入的PSS装置应可靠投入运行。发电机自动励磁调节装置、PSS装置如遇异常退出,应及时向当值调度员备案,事后向技术监督部门汇报。
(2)电厂将励磁系统定值报有关调度部门和技术监督部门审核、批准后执行。运行中如定值或设定参数发生变化,须经有关调度部门和技术监督部门核准方可执行。参数实测后如定值或设定参数发生变化,应说明对已实测参数是否有影响,必要时重新进行参数实测工作。
(3)发电机励磁系统应采用定发电机电压控制方式运行。如果采用其他控制方式需要经过调度部门和技术监督部门的批准。
2、按照经典自动控制原理,一般采用PID控制方式。其中的P代表比例调节控制,I代表积分调节控制,D代表微分调节控制。
一般励磁调节器中的PID控制形式有以下三种方式:
(1)并联PID控制方式传递函数
Kp :比例增益;Ki :积分增益;Kd :微分增益。 传递函数的数学表达式为:KdS S
Ki Kp ++ (2)串联PID 控制方式传递函数
传递函数的数学表达式为:)11()2111(TiS
S T S T Kp +?++?
说明:
并联PID 控制方式和串联PID 控制方式,按照自动控制原理的传递函数,只是表述方式的不同,实际的传递函数形式是一致的。
将并联PID 的传递函数可以变换为:S
KdS KpS Ki 2
++ (1)。 将串联PID 传递函数中,令T2=0,可以变换为:S
S T Kp S Kp T Ti Kp Ti Kp 21)1(?++?+(2)。 以上(1)、(2)两个数学公式中,令:
Ki (1)=Kp/Ti (2),Kp (1)=Kp/Ti*T1+Kp (2),Kd (1)=Kp*T1(2)。则二者具有相同的函数特性。
(3)两级超前滞后环节控制方式传递函数
传递函数的数学表达式为:S
T S T S T S T Kp 41312111++?++? 在实际整定中,一般将T1< 具体到实际励磁调节器中不同的设计,励磁调节器中的实际传递函数和表述方式不同,整定的参数含义和数值也有所不同。请注意。 二、励磁系统中的自动方式下,主要影响特性的是PID 参数。PID 参数的整定不同,对自动方式下,励磁系统的动态特性影响很大。 1、励磁系统行业标准中规定:阶跃量为发电机额定电压的5%,发电机端电压超调量应不超过阶跃量的30%,振荡次数不超过3次,调整时间不超过10S ,电压上升时间不大于0.6S (自并励系统)或0.8S (三机常规))。 2、自动控制方式下,PID 参数变化对励磁系统动态特性的影响 (1)以并联PID 控制方式为例,了解PID 参数对动态特性的影响。 并联PID 控制方式的基本传递函数形式如下: (1.1)改变Kp参数对励磁系统动态特性的影响: 改变纯比例增益Kp,主要影响发电机电压的上升速率和超调量,纯比例增益Kp增大,上升速度加快,超调量增大。 (1.2)改变Ki参数对励磁系统动态特性的影响:
相关主题
文本预览