
锁相环学习总结
通过这段的学习,我对锁相环的一些基本概念、结构构成、工作原理、主要参数以及simulink 搭建仿真模型有了较清晰的把握与理解,同时,在仿真中也出现了一些实际问题,下面我将对这段学习中对锁相环的认识和理解、设计思路以及中间所遇到的问题作一下总结:
1. 概述
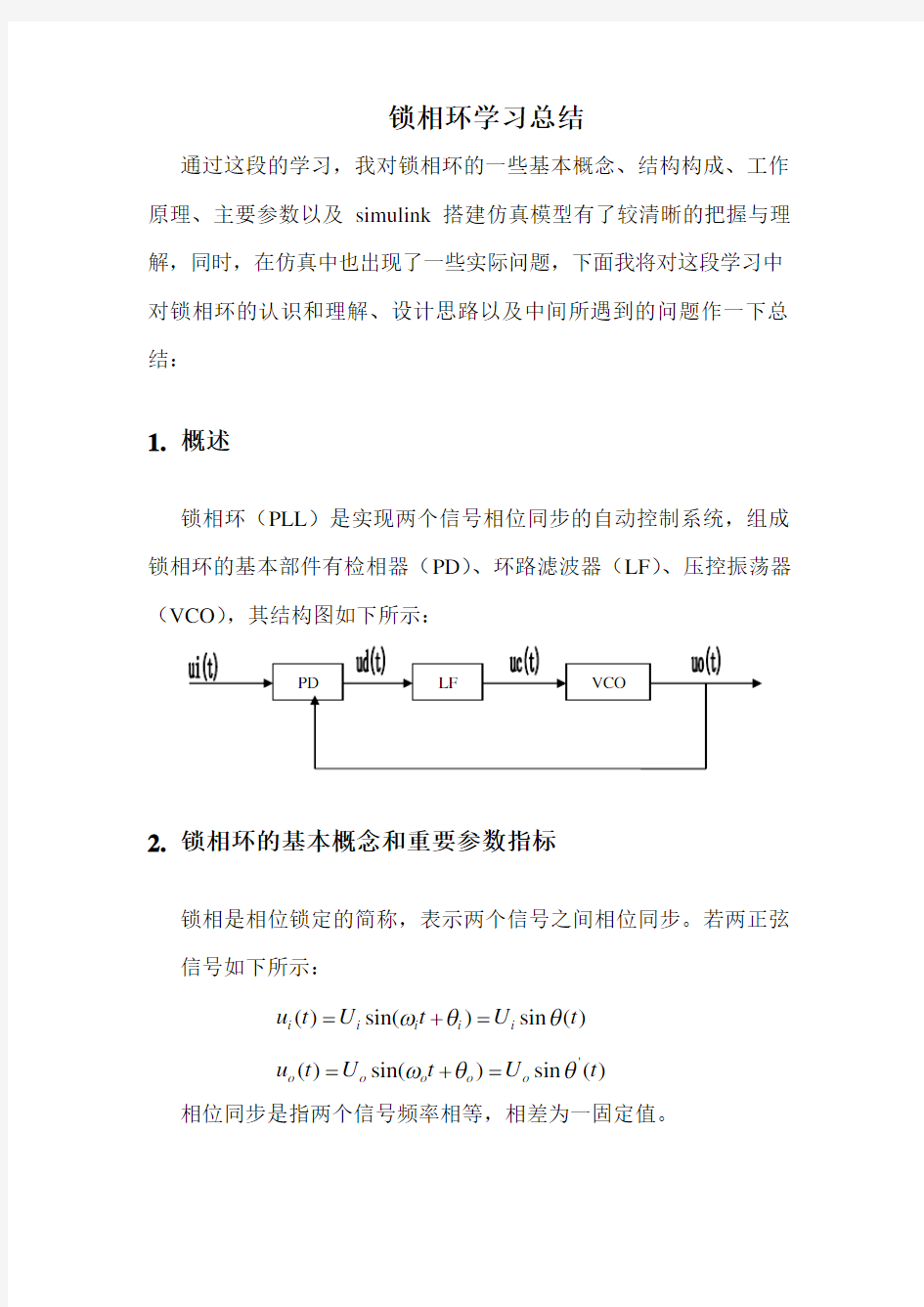
锁相环(PLL )是实现两个信号相位同步的自动控制系统,组成锁相环的基本部件有检相器(PD )、环路滤波器(LF )、压控振荡器(VCO ),其结构图如下所示:
2. 锁相环的基本概念和重要参数指标
锁相是相位锁定的简称,表示两个信号之间相位同步。若两正弦信号如下所示:
相位同步是指两个信号频率相等,相差为一固定值。
)
(sin )sin()()(sin )sin()('t U t U t u t U t U t u o o o o o i i i i i θθωθθω=+==+=
当i ω=o ω,两个信号之间的相位差 为一固定值,
不 随时间变化而变化,称两信号相位同步。
当i ω≠o ω,两个信号的相位差 ,不论i θ
是否等于o θ,只要时间有变化,那么相位差就会随时间变化而
变化,称此时两信号不同步。若这两个信号分别为锁相环的输入和输出,则此时环路出于失锁状态。
当环路工作时,且输入与输出信号频差在捕获带范围之内,通过环路的反馈控制,输出信号的瞬时角频率)(t v ω便由o ω向i ω方向变化,总会有一个时刻使得i ω=o ω,相位差等于0或一个非常小的常数,那么此时称为相位锁定,环路处于锁定状态。若达到锁定状态后,输入信号频率变化,通过环路控制,输出信号也继续变化
并向输入信号频率靠近,相位差保持在一个固定的常数之内,则称环路此时为跟踪状态。锁定状态可以认为是静态的相位同步,而跟踪状态则为动态的相位同步。 环路从失锁进入到锁定状态称为捕获状态。
其他几个环路工作时的重要概念:
快捕带:能使环路快捕入锁的最大频差称为环路的快捕带,记为
L ω?,两倍的快捕带为快捕范围。
捕获带:能使环路进入锁定的最大固有频差,用P ω?表示,两倍的捕获带为捕获范围。
同步带:环路在所定条件下,可缓慢增加固有频差,直到环路失锁,把能够维持环路锁定的最大固有频差成为同步带,用H ω?,
o i t t θθθθ-=-)()('o i o i t t t θθωωθθ-+-=-)()()('
2H ω?为同步范围。 三者关系为:H P L ωωω?
在理想二阶环的情况下,在捕获状态下,评价捕获性能的主要指标为P ω?、L ω?和捕获时间P T 。计算式如下:
3
2
02/2n
P P n L T ξωωωξωω?=∞=?=?
其中,n ω为自然谐振角频率,后面将介绍n ω在设计环路滤波器时,将与ξ(阻尼系数,由于考虑到不同ξ对多种输入信号的误差响应和输出响应的影响,选取使响应曲线最平稳的最佳值0.707)决定滤波器两个参数的大小,仿真中可通过设定快捕带得到n ω。从这可以看到,P T 不仅与环路参数有关,而且与初始频差有关,固有频差越大,则需捕获时间就越长。
在同步状态下,重要的指标有稳态相位误差)(∞e θ和H ω?,环路锁定后,频差等于0,但稳态相差通常会存在,它反映了环路的跟踪精度,稳态相差越小,跟踪精度越高。理想二阶环条件下,
∞=?H ω。
3. 锁相环的构成及工作原理
从锁相环结构图看到,其包括鉴相器、环路滤波器和压控振荡器。
3.1. 鉴相器
正弦型鉴相器即一乘法器(有些资料后接LPF ),用于检测环路输入信号相位与输出信号相位间的相位误差)(t e θ,设输入输出信号分别为:
作如下变换:
通过鉴相器后得到,
m K 为相乘系数,这里为1/2。
3.2. 环路滤波器
由通过检相器式子看出,检相器输出包含了和频分量和差频分量,通过环路滤波器,由于其具有低通特性,和频分量将被滤除,输出为振荡器的控制信号)(t u c 。记F(p)为环路滤波器的传递函数,则)()()(t u p F t u d c =。
)
(sin )sin()(t U t U t u i i i i i θθω=+=)
(cos ))(cos()('t U t t U t u o o o o o θθω=+=)
()()
()()(;)()(2'11t t t t t t t t t t t t o o i o o i o i o i o i i θωθθωθθωθωωωθωωωθωθ+=+=+?=-=?+-+=+=)]()(2sin[)]()({sin[***)2/1()()(2121t t t t t U U K t u t u K o o i m o i m θθωθθ+++-=)
()(t U t u e d d θ=
3.3. 压控振荡器
压控振荡器为电压频率变换器,其瞬时频率为 当)(t u c =0时,)(t v ω=0ω。瞬时相位可以表示为 通过以上分析,得到模拟锁相环的相位模型为:
相应的数字锁相环的模型为
则PLL 的动态方程为
4. 数字锁相环的设计及simulink 仿真
数字锁相环的设计主要在于环路滤波器和NCO 的设计,而鉴相器则为一简单的数字乘法器。下面将主要介绍数字环路滤波器和NCO 的设计。
)
()]([)(t u K t u f t c o o c v +==ωω)
(*p /)(dt
)(dt )()(2t
0t
0't u K t t u K t t c o c o o v )(=?+=?=θωωθ
)
(sin )p (KF )(p )(p 1t t t e e θθθ-=
4.1. 数字环路滤波器设计
在清楚数字环路滤波器的结构后,数字环路滤波器的系数是设计的主要部分,其结构如下图所示(simulink 仿真图):
传输函数为:)1/()(/)()(121--+==z C C k u k u z F d c
由PLL 的线性化数字模型得到的传递函数,将N(z)和F(z)代入得
到12
()121()12
1[()2](1)121
K K C C z K K C z o d o d H z K K C C z K K C z o d o d --+-=--++-+- 由PLL 的线性化模拟模型得到传递函数并代入N(s)及F(s),然后进行双线性变换()1/()1)(/2(11--+-=z z T s s )得到
22122[4()]2()[()4]()2221[44()](1)[2()8]T T T z T T z n n n n n H z T T z T z
n n n ξωωωωξωξωωω--+++-=--++++- 比较两式得到C1、C2,分别为
)
)(44/()(4*)/1())(44/(8*)/1(2
2
221T T T K K C T T T K K C n n n d o n n n d o ωξωωωξωξω++=++=
通常d o K K K =取1,ξ取0.707,n ω可由自己设定的快捕带得到,T 为抽样间隔,经计算然后可以求得两参数。
4.2. NCO
在介绍NCO 的设计之前先介绍一下DDS 算法。
4.2.1. DDS 算法
NCO 一般采用数字相位综合技术(DDS ),该技术主要是由时钟驱动读取三角函数表,基于DDS 的NCO 结构如下图所示:
一个N 位字长相位累加器的DDS 的基本结构图如下所示:
以单频信号说明DDS 的工作原理,信号为
)(cos )2cos()(t U t f U t s o o o θ?=?+∏=
??为初始相位(即前述信号的相位初始值t o ω)
以采样频率s f 对信号进行采样,得到离散相位序列
s
s o s o f f T f kT f k /22k 2)(o ∏=∏=??+?=?+∏=θ?
θ?θ
θ?即连续两次采样间的相位增量,控制θ?可控制输出信号的频
率。现将正弦函数一周期的相位∏2进行等分,当用N 位字长的相
位累加器时,最小等分量为N 2/2∏=δ,若每次相位增量取δ,得到的最低频率增量为N min 2/2/s s o f T f =∏=δ,若频率控制字为M ,则可得到输出信号频率增量为N 2/M 2/M s s f T =∏δ。可以预见,若M 越大,则相位累加幅度就越大,输出频率也就向目标频率变化越快,落到锁相环范围内捕获时间也就越小。
4.2.2. 设计原理
这样就可以清楚地得到NCO 的数学模型。设NCO 的自由振荡频率为o f ,0)0(2=θ,在相位累加器的字长为N 、采样频率为s f 确定的情况下,可确定所用DDS 频率控制字的初始值和初始相位分别为s o f f M /2o ∏=和s o o f f M /22/2N ∏=∏=??,根据环路工作原理,数字环路滤波器输出的控制电压加到NCO 的控制端,来调整输出频率,即当数字环路滤波器输出的数字控制电压为)(k u c 时,相应的频率控制字变化量就为)(k u M c =?,NCO 输出频率和输出相位为:
N N 2/2/M f M f f s o s out ?+=
)()(k k θ?θ?+?=
)()('
'
k u K M K k c o o =?=?θ
式中,N 2/2)(M k ∏?=?θ,定义N 2/2s o f K ∏=为NCO 的频率控制增益,单位为rad/(sV)。
NCO 相当于一相位累加器,即一差分方程,转换到Z 域,其传递方程即为)1/()()(11'2---=z z K k u k o c θ。
由此,便可以构造其仿真模型,仿真图如下所示。
5.仿真模型及所遇到的问题
5.1.无噪声模型
锁相环simulink仿真图如下所示
参数设置如表所示:
输入信号频率110e3HZ
采样频率300e3HZ
2*pi*10e3
n
K0 2
C1 8.8844e+004
C2 1.3159e+004 Simulation time 0.002s
运行模型后得到输入与输出频谱图比较如下:
这里我们利用Matlab中的Simulink和SimMechanics做仿真,那么先来看看相关的资料。 SimMechanics ——机械系统建模和仿真 SimMechanics 扩展Simscape? 在三维机械系统建模的能力。用户可以不进行方程编程,而是借助该多刚体仿真工具搭建模型,这个模型可以由刚体、铰链、约束以及外力组成。自动化3-D动画生成工具可做到仿真的可视化。用户也可通过从CAD系统中直接导入模型的质量、惯量、约束以及三维几何结构。Real-Time Workshop可以对SimMchanics模型进行自动化C代码生成,并在硬件在回路仿真过程中可以使用生成的代码而不是硬件原型测试嵌入式控制器。 SimMechanics可以用于开发悬架、机器手臂、外科医疗设备、起落架和大量的其它机械系统。用户也可以在SimMechanics环境下集成其它的MathWorks物理建模工具,这样做可以实现更加复杂跨领域的物理建模。 特点: ?提供了三维刚体机械系统的建模环境 ?包含了一系列分析机械运动和设计机械元件尺寸的仿真技术 ?三维刚体可视化仿真 ?SimMechanics Link utility,提供Pro/ENGINEER 和SolidWorks CAD平台的接口并且也提供了API函数和其它CAD平台的接口
?能够把模型转化为C代码(使用Real-Time Workshop) ?由于集成在Simulink环境中,因此可以建立高精度、非线性的模型以支持控制系统的开发和测试。 强大功能: 搭建机械系统模型 使用SimMechanics用户仅需要收集物理系统信息即可建立三维机械系统模型。使用刚体、坐标系、铰链和作用力元素定义和其它Simulink模型直接相连的部分。这个过程可以重用Simulink模型以及扩展了SimMechanics工具的能力。用户还可把Simulink模型和SimMechnics模型集成为一个模块,并可封装成可在其它模型中复用的子系统。 机械系统建模仿真和分析 SimMechanics包含如下子系统: ?使用Simulink查表模块和SimMechanics传感器和作动器定义的非线性的弹性单元 ?用来定义航空器件压力分布的空气动力学拖曳模块,例如副翼和方向舵 ?车辆悬架系统,例如防侧翻机械装置和控制器 ?轮胎模型
锁相环的原理 2007-01-23 00:24 1.锁相环的基本组成 许多电子设备要正常工作,通常需要外部的 输入信号与部的振荡信号同步,利用锁相环 路就可以实现这个目的。 锁相环路是一种反馈控制电路,简称锁相环(PLL)。锁相环的特点是:利用外部输入的参考信号控制环路部振荡信号的频率和相位。 因锁相环可以实现输出信号频率对输入信号频率的自动跟踪,所以锁相环通常用于闭环跟踪电路。锁相环在工作的过程中,当输出信号的频率与输入信号的频率相等时,输出电压与输入电压保持固定的相位差值,即输出电压与输入电压的相位被锁住,这就是锁相环名称的由来。 锁相环通常由鉴相器(PD)、环路滤波器(LF)和压控振荡器(VCO)三部分组成,锁相环组成的原理框图如图8-4-1所示。 锁相环中的鉴相器又称为相位比较器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成u D(t)电压信号输出,该信号经低通滤波器滤波后形成压控振荡器的控制电压u C(t),对振荡器输出信号的频率实施控制。 2.锁相环的工作原理 锁相环中的鉴相器通常由模拟乘法器组成,利用模拟乘法器组成的鉴相器电路如图8-4-2所示。鉴相器的工作原理是:设外界输入的信号电压和压控振荡器输出的信号电压分别为: (8-4-1) (8-4-2) 式中的ω0为压控振荡器在输入控制电压为零或为直流电压时的振荡角频率,称为电路的固有振荡角频率。则模拟乘法器的输出电压u D为: 用低通滤波器LF将上式中的和频分量滤掉,剩下的差频分量作为压控振荡器的输入控制电压u C (t)。即u C(t)为: (8-4-3) 式中的ωi为输入信号的瞬时振荡角频率,θi(t)和θO(t)分别为输入信号和输出信号的瞬时位相,根据相量的关系可得瞬时频率和瞬时位相的关系为:
高频电子线路实训报告锁相环路仿真设计 专业 学生姓名 学号 2015 年 6 月24日
锁相环应用电路仿真 锁相环是一种自动相位控制系统,广泛应用于通信、雷达、导航以及各种测量仪器中。锁相环及其应用电路是“通信电子电路”课程教学中的重点容,但比较抽象,还涉及到新的概念和复杂的数学分析。因此无论是教师授课还是学生理解都比较困难。为此,我们将基于Multisim的锁相环应用仿真电路引入课堂教学和课后实验。实践证明,这些仿真电路可以帮助学生对相关容的理解,并为进行系统设计工作打下良好的基础。锁相环的应用电路很多,这里介绍锁相环调频、鉴频及锁相接收机的Multisim仿真电路。 1.锁相环的仿真模型 首先在Multisim软件中构造锁相环的仿真模型(图1)。基本的锁相环由鉴相器(PD)、环路滤波器(I P)和压控振荡器(VCO)三个部分组成。图中,鉴相器由模拟乘法器A 实现,压控振荡器为V3,环路滤波器由R1、C1构成。环路滤波器的输出通过R2、R3串联分压后加到 压控振荡器的输入端,直流电源V2用来调整压控振荡器的中心频率。仿真模型中,增加R2、R3及的目的就是为了便于调整压控振荡器的中心频率。 图1 锁相环的仿真模型 2.锁相接收机的仿真电路 直接调频电路的振荡器中心频率稳定度较低,而采用晶体振荡器的调频电路,其调频围又太窄。采用锁相环的调频器可以解决这个矛盾。其结构原理如图2所示。
图2 锁相环调频电路的原理框图 实现锁相调频的条件是调制信号的频谱要处于低通滤波器通带之外,也就是说,锁相环路只对慢变化的频率偏移有响应,使压控振荡器的中心频率锁定在稳定度很高的晶振频率上。而随着输人调制信号的变化,振荡频率可以发生很大偏移。 图3 锁相环调频的仿真电路 根据图2建立的仿真电路如图3所示。图中,设置压控振荡器V1在控制电压为0时,输出频率为0;控制电压为5V时,输出频率为50kHz。这样,实际上就选定了压控振荡器的中心频率为25kHz,为此设定直流电压V3为2.5V。调制电压V4通过电阻Rs接到VCO的输人端,R实际上是作为调制信号源V4的阻,这样可以保证加到VCO输人端的电压是低通滤波器的输出电压和调制电压之和,从而满足了原理图的要求。本电路中,相加功能也可以通过一个加法器来完成,但电路要变得相对复杂一些。 VCO输出波形和输人调制电压的关系如图4所示。由图可见,输出信号频率随着输人信号的变化而变化,从而实现了调频功能。
【最新整理,下载后即可编辑】 实验四SIMULINK仿真模型的建立及仿真(一) 一、实验目的: 1、熟悉SIMULINK模型文件的操作。 2、熟悉SIMULINK建模的有关库及示波器的使用。 3、熟悉Simulink仿真模型的建立。 4、掌握用不同的输入、不同的算法、不同的仿真时间的系统仿真。 二、实验内容: 1、设计SIMULINK仿真模型。 2、建立SIMULINK结构图仿真模型。 3、了解各模块参数的设定。 4、了解示波器的使用方法。 5、了解参数、算法、仿真时间的设定方法。 例7.1-1 已知质量m=1kg,阻尼b=2N.s/m。弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK模型,并进行仿真运行。 步骤: 1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。
图一:SIMULINK模块浏览器 2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。 图二:已经复制进库模块的新建模型窗 3、从模块库复制所需模块到新建模型窗,分别在模块子库中
找到所需模块,然后拖进空白模型窗中,如图二。 4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标“点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。 5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉”时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。如图三所示: 图三:已构建完成的新模型窗 6、根据理论数学模型设置模块参数: ①设置增益模块
手机射频部分的关键电路----锁相环电路 锁相坏电路是一种用来消除频率误差为目的反馈控制电路,目前市场销售的手机基本上都是采用这种电路来控制射频电路中的压控振荡器。使其输出准确稳定的振荡频率。如锁相坏(PLL)电路出现故障将导致本振的频率输出不准确,则导致手机无信号。 目前通信终端设备中对频率的稳定采用的是频率合成CSYN技术。频率合成的基本方法有三种:第一种直接频率合成;第二种锁相频率合成(PLL);第三种直接数字频率合成(DDS)。由于锁相频率合成技术在电路设计方面(简单),成本方面控制灵敏度方面,频谱纯净度方面等。都要胜于直接频率合成,与直接数字频率合成。所以被移动通信终端设备广范采用。它在手机电路中的作用是控制压控振荡器输出的频率,相位与基准信号的频率,相位保持同步。 锁相坏电路的构成与工作原理: 1、构成:它是由鉴相器(PD)低通滤波器(LPF) 压控振荡器(VCO)三部分组成。 鉴相器:它是一个相位比较器。基准频率信号和压控振荡器输出的取样频率在其内部 进行相位比较,输出误差电压。 低通滤波器:是将鉴相器输出的锁相电压进行滤波,滤除电流中的干扰和高频成分。得到一个纯净的直流控制电压。 压控振荡器:产生手机所要的某一高频频率。 (注:SYNEN、SYNCLK、SYNDATA来自CPU控制分频器,对本振信号进行N次分频)。 当VCO产生手机所须的某一高频频率。一路去混频管,另一路反馈给锁相环,中的分频器进行N次分频。在这里为什么要进行N次分频呢?首先要说明一下基准频率与VCO振荡取样频率在鉴相要满足3个条件。 ①频率相同。②幅度相同。③相位不同。为了满足鉴相条件,所以在电路中设置了分 频器。VCO振荡频率取样信号送入分频器完成N次分频后,得到一个与基准频率相位不同,但频率
基于Matlab的数字锁相环的仿真设计 1115101021 金佳琪 摘要:锁相环是一个能够跟踪输入信号相位变化的闭环自动跟踪系统。它广泛应用于无线电的各个领域,并且,现在已成为通信、雷达、导航、电子仪器等设备中不可缺少的一部分。然而由于锁相环设计的复杂性,用SPICE对锁相环进行仿真,数据量大,仿真时间长,而且需进行多次仿真以提取设计参数,设计周期长。本文借助于Matlab中Simulink仿真软件的灵活性、直观性,在Simulink 中利用仿真模块搭建了全数字锁相环的仿真模型。利用仿真模块搭建了全数字锁相环的仿真模型,通过仿真达到了设计的目的,验证了此全数字锁相环能达到的各项功能要求。 关键词:锁相环,MATLAB,锁定,Simulink,频率合成 全数字锁相环 随着最近几年数字电路技术的发展,锁相环路在数字领域获得了越来越多的使用。与模拟锁相环相比,全数字锁相环不含无源器件、面积小、具有较强的抗噪声能力,锁定时间短,可以很方便地在各个工艺之间转换,重用性高,设计周期短。 方案介绍 全数字锁相环包括数字鉴相鉴频器(PDF)、数字滤波器(LPF)、数字振荡器(NCO)三部分,如下图12所示: 图1 全数字锁相环的仿真框图 由图12和图11的比较可以看出,全数字锁相环实际上是通过将模拟锁相环路替换成数字电路得到的。这意味着鉴相鉴频器(PDF)、环路低通滤波器(LPF)需要转换到离散系统。环路低通滤波器(LPF)可以通过一个希望的传输函数的拉普拉斯变换的z变换而得到。压控振荡器需要转换成数控振荡器(Numerically Controlled Oscilaator)。下面详细讨论鉴相鉴频器(PDF)、环路低通滤波器(LPF)以及数控振荡器(Numerically Controlled Oscilaator)模型的建立。 模型的建立 正和上述基于频率合成的模拟锁相环的仿真模型的建立相似,全数字锁相环仿真模型的建立也基于相同的算法: 锁相环闭环系统状态的变化依赖于PFD输出的相位误差。相位误差输出一次,锁相环状态改变一次;PFD不输出相位误差,锁相环里的所有信号均不改变状态。根据上
基于Matlab的数字锁相环的仿真设计 摘要:锁相环是一个能够跟踪输入信号相位变化的闭环自动跟踪系统。它广泛应用于无线电的各个领域,并且,现在已成为通信、雷达、导航、电子仪器等设备中不可缺少的一部分。然而由于锁相环设计的复杂性,用SPICE对锁相环进行仿真,数据量大,仿真时间长,而且需进行多次仿真以提取设计参数,设计周期长。本文借助于Matlab中Simulink仿真软件的灵活性、直观性,在Simulink 中利用仿真模块搭建了全数字锁相环的仿真模型。先借助模拟锁相环直观形象、易于理解的特点,通过锁相环在频率合成方面的应用,先对模拟锁相环进行了仿真,对锁相环的工作原理进行了形象的说明。在模拟锁相环的基础上,重新利用仿真模块搭建了全数字锁相环的仿真模型,通过仿真达到了设计的目的,验证了此全数字锁相环完全能达到模拟锁相环的各项功能要求。 关键词:锁相环,压控振荡器,锁定,Simulink,频率合成,仿真模块 1引言 1932年法国的H.de Bellescize提出同步捡波的理论,首次公开发表了对锁相环路的描述。到1947年,锁相环路第一次应用于电视接收机的水平和垂直扫描的同步。到70年代,随着集成电路技术的发展,逐渐出现集成的环路部件、通用单片集成锁相环路以及多种专用集成锁相环路,锁相环路逐渐变成了一个成本低、使用简便的多功能组件,为锁相技术在更广泛的领域应用提供了条件。锁相环独特的优良性能使其得到了广泛的应用,其被普遍应用于调制解调、频率合成、电视机彩色副载波提取、FM立体声解码等。随着数字技术的发展,相应出现了各种数字锁相环,它们在数字信号传输的载波同步、位同步、相干解调等方面发挥了重要的作用。而Matlab强大的数据处理和图形显示功能以及简单易学的语言形式使Matlab在工程领域得到了非常广泛的应用,特别是在系统建模与仿真方面,Matlab已成为应用最广泛的动态系统仿真软件。利用MATLAB建模可以快速地对锁相环进行仿真进而缩短开发时间。 1.1选题背景与意义 Matlab是英文MATrix LABoratory(矩阵实验室)的缩写。1980年,时任美国新墨西哥大学计算机系主任的Cleve Moler教授在给学生讲授线性代数课程时,为使学生从繁重的数值计算中解放出来,用FORTRAN语言为学生编写了方便使用Linpack和Eispack的接口程序并命名为MATLAB,这便是MATLAB的雏形。经过几年的校际流
实验报告 课程名称:MATLAB语言与控制系统仿真 实验项目:PID控制系统的Simulink仿真分析专业班级: 学号: 姓名: 指导教师: 日期: 机械工程实验教学中心
注:1、请实验学生及指导教师实验前做实验仪器设备使用登记; 2、请各位学生大致按照以下提纲撰写实验报告,可续页; 3、请指导教师按五分制(优、良、中、及格、不及格)给出报告成绩; 4、课程结束后,请将该实验报告上交机械工程实验教学中心存档。 一、实验目的和任务 1.掌握PID 控制规律及控制器实现。 2.掌握用Simulink 建立PID 控制器及构建系统模型与仿真方法。 二、实验原理和方法 在模拟控制系统中,控制器中最常用的控制规律是PID 控制。PID 控制器是一 种线性控制器,它根据给定值与实际输出值构成控制偏差。PID 控制规律写成传递 函数的形式为 s K s Ki K s T s T K s U s E s G d p d i p ++=++==)1 1()() ()( 式中,P K 为比例系数;i K 为积分系数;d K 为微分系数;i p i K K T =为积分时间常数; p d d K K T =为微分时间常数;简单来说,PID 控制各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产 生控制作用,以减少偏差。 (2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积 分时间常数i T ,i T 越大,积分作用越弱,反之则越强。 (3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大 之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调 节时间。 三、实验使用仪器设备(名称、型号、技术参数等) 计算机、MATLAB 软件 四、实验内容(步骤) 1、在MATLAB 命令窗口中输入“simulink ”进入仿真界面。 2、构建PID 控制器:(1)新建Simulink 模型窗口(选择“File/New/Model ”),在 Simulink Library Browser 中将需要的模块拖动到新建的窗口中,根据PID 控制器的 传递函数构建出如下模型:
PLL(锁相环)电路原理及设计[收藏] PLL(锁相环)电路原理及设计 在通信机等所使用的振荡电路,其所要求的频率范围要广,且频率的稳定度要高。无论多好的LC振荡电路,其频率的稳定度,都无法与晶体振荡电路比较。但是,晶体振荡器除了可以使用数字电路分频以外,其频率几乎无法改变。如果采用PLL(锁相环)(相位锁栓回路,PhaseLockedLoop)技术,除了可以得到较广的振荡频率范围以外,其频率的稳定度也很高。此一技术常使用于收音机,电视机的调谐电路上,以及CD唱盘上的电路。 一PLL(锁相环)电路的基本构成 PLL(锁相环)电路的概要 图1所示的为PLL(锁相环)电路的基本方块图。此所使用的基准信号为稳定度很高的晶体振荡电路信号。 此一电路的中心为相位此较器。相位比较器可以将基准信号与VCO (Voltage Controlled Oscillator……电压控制振荡器)的相位比较。如果此两个信号之间有相位差存在时,便会产生相位误差信号输出。 (将VCO的振荡频率与基准频率比较,利用反馈电路的控制,使两者的频率为一致。) 利用此一误差信号,可以控制VCO的振荡频率,使VCO的相位与基准信号的相位(也即是频率)成为一致。 PLL(锁相环)可以使高频率振荡器的频率与基准频率的整数倍的频率相一致。由于,基准振荡器大多为使用晶体振荡器,因此,高频率振荡器的频率稳定度可以与晶体振荡器相比美。 只要是基准频率的整数倍,便可以得到各种频率的输出。 从图1的PLL(锁相环)基本构成中,可以知道其是由VCO,相位比较器,基准频率振荡器,回路滤波器所构成。在此,假设基准振荡器的频率为fr,VCO的频率为fo。 在此一电路中,假设frgt;fo时,也即是VC0的振荡频率fo比fr低时。此时的相位比较器的输出PD 会如图2所示,产生正脉波信号,使VCO的振荡器频率提高。相反地,如果frlt;fo时,会产生负脉波信号。
实验四 SIMULINK仿真模型的建立及仿真(一) 一、实验目的: 1、熟悉SIMULINK模型文件的操作。 2、熟悉SIMULINK建模的有关库及示波器的使用。 3、熟悉Simulink仿真模型的建立。 4、掌握用不同的输入、不同的算法、不同的仿真时间的系统 仿真。 二、实验内容: 1、设计SIMULINK仿真模型。 2、建立SIMULINK结构图仿真模型。 3、了解各模块参数的设定。 4、了解示波器的使用方法。 5、了解参数、算法、仿真时间的设定方法。 例7.1-1 已知质量m=1kg,阻尼b=2N.s/m。弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK 模型,并进行仿真运行。 步骤: 1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。
图一:SIMULINK模块浏览器 2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。 图二:已经复制进库模块的新建模型窗 3、从模块库复制所需模块到新建模型窗,分别在模块子库中找到所需模块,然后拖进空白模型窗中,如图二。 4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标“点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。 5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉”时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。如图三所示:
本科生毕业设计(申请学士学位) 论文题目基于Matlab的 数字锁相环的仿真设计 作者姓名 专业名称电子信息工程 指导教师 2014年5月
学生:(签字)学号: 答辩日期:2014 年 5 月24 日指导教师:(签字)
目录 摘要 (1) Abstract (1) 1 绪论 (2) 1.1 本文研究背景 (2) 1.2 本文研究意义 (2) 1.3 锁相环和仿真方式 (2) 1.3.1 锁相环 (2) 1.3.2 仿真方式 (2) 1.4 本文研究内容 (3) 2 模拟锁相环Matlab仿真 (3) 2.1 模拟锁相环方案 (3) 2.1.1 模拟鉴相器 (3) 2.1.2 模拟低通滤波器 (6) 2.1.3 模拟压控振荡器 (7) 2.2 模拟锁相环仿真 (8) 2.3 本章小结 (9) 3 数字锁相环Matlab仿真 (10) 3.1 数字锁相环方案 (10) 3.1.1 数字鉴相器 (10) 3.1.2 数字滤波器 (12) 3.1.3 数字压控振荡器 (13) 3.2 数字锁相环仿真 (14) 3.3 本章小结 (15) 4 总结与展望 (15) 参考文献 (16) 致谢 (18)
基于Matlab的数字锁相环的仿真设计 摘要:锁相环是一种能够自动跟踪信号相位并达到锁频目的的闭环负反馈系统。数字锁相环在无线电领域得到较广泛的应用和发展。而且已经成为雷达、通信、导航等各类电子信号产品不可替代的元器件之一。锁相环的窄带跟踪性能使其得到较广泛应用。因为锁相技术在实际应用中较为复杂,所以锁相环的设计通常采用仿真设计这种方式。本次设计采用Matlab这一软件进行辅助仿真设计,完全能达到设计预期的目标。Matlab中的Simulink仿真软件,具有很强的灵活性和直观性。本次设计所采用的方法是在simulink中搭建模拟锁相的模型,并对模拟锁相环的组成、结构、设计进行不断的分析和改进。然后根据模拟锁相环的原理进行改进,并搭建数字锁相环。 关键词:锁相环;自动跟踪;matlab;simulink Simulative design of digital phase-locked loop based on Matlab Abstract:PLL is the automatic tracking system of close loop atracking signal phase. It is widely used in various fields of radio. It has become an irreplaceable part of radar, communication, navigation and all kinds of electronicsignal device. PLL is able to be widely used. Because, it has unique narrow-band tracking performance. However, because of the complexity of phase lock technique, for the design of PLL have brought great difficulty. This design uses Matlab, the simulative software for design assistance, can completely meet the design expectations. Simulink simulative software on Matlab, has strong flexibility and intuitive. Methods used by this project is to build the analog phase locked in the Simulink model, and the composition, structure, design of analog phase-locked loop of continuous improvement and analysis. It improved according to the principle of analog PLL, build digital phase-locked loop in Simulink, and then reach the simulation design of digitalphase-locked loop based on Matlab the design objective . Key words: PLL, Automatic tracking, Matlab, simulink
银河航空航天大学 课程设计 (论文) 题目复杂过程控制系统设计与Simulink仿 真 班级 学号 学生姓名 指导教师
目录 0. 前言 (1) 1. 总体方案设计 (2) 2. 三种系统结构和原理 (3) 2.1 串级控制系统 (3) 2.2 前馈控制系统 (3) 2.3 解耦控制系统 (4) 3. 建立Simulink模型 (5) 3.1 串级 (5) 3.2 前馈 (5) 3.3 解耦 (7) 4. 课设小结及进一步思想 (15) 参考文献 (15) 附录设备清单 (16)
复杂过程控制系统设计与Simulink仿真 姬晓龙银河航空航天大学自动化分校 摘要:本文主要针对串级、前馈、解耦三种复杂过程控制系统进行设计,以此来深化对复杂过程控制系统的理解,体会复杂过程控制系统在工业生产中对提高产品产量、质量和生产效率的重要作用。建立Simulink模型,学习在工业过程中进行系统分析和参数整定的方法,为毕业设计对模型进行仿真分析及过程参数整定做准备。 关键字:串级;前馈;解耦;建模;Simulink。 0.前言 单回路控制系统解决了工业过程自动化中的大量的参数定制控制问题,在大多数情况下这种简单系统能满足生产工艺的要求。但随着现代工业生产过程的发展,对产品的产量、质量,对提高生产效率、降耗节能以及环境保护提出了更高的要求,这便使工业生产过程对操作条件要求更加严格、对工艺参数要求更加苛刻,从而对控制系统的精度和功能要求更高。为此,需要在单回路的基础上,采取其它措施,组成比单回路系统“复杂”一些的控制系统,如串级控制(双闭环控制)、前馈控制大滞后系统控制(补偿控制)、比值控制(特殊的多变量控制)、分程与选择控制(非线性切换控制)、多变量解耦控制(多输入多输出解耦控制)等等。从结构上看,这些控制系统由两个以上的回路构成,相比单回路系统要多一个以上的测量变送器或调节器,以便完成复杂的或特殊的控制任务。这类控制系统就称为“复杂过程控制系统”,以区别于单回路系统这样简单的过程控制系统。 计算机仿真是在计算机上建立仿真模型,模拟实际系统随时间变化的过程。通过对过程仿真的分析,得到被仿真系统的动态特性。过程控制系统计算机仿真,为流程工业控制系统的分析、设计、控制、优化和决策提供了依据。同时作为对先进控制策略的一种检验,仿真研究也是必不可少的步骤。控制系统的计算机仿真是一门涉及到控制理论、计算机数学与计算机技术的综合性学科。控制系统仿真是以控制系统的模型为基础,主要用数学模型代替实际控制系统,以计算机为工具,对控制系统进行实验和研究的一种方法。在进行计算机仿真时,十分耗费时间与精力的是编制与修改仿真程序。随着系统规模的越来越大,先进过程控制的出现,就需要行的功能强大的仿真平台Math Works公司为MATLAB提供了控制系统模型图形输入与仿真工具Simulink,这为过程控制系统设计与参数整定的计算与仿真提供了一个强有力的工具,使过程控制系统的设计与整定发生了革命性的变化。
锁相环学习总结 通过这段的学习,我对锁相环的一些基本概念、结构构成、工作原理、主要参数以及simulink 搭建仿真模型有了较清晰的把握与理解,同时,在仿真中也出现了一些实际问题,下面我将对这段学习中对锁相环的认识和理解、设计思路以及中间所遇到的问题作一下总结: 1. 概述 锁相环(PLL )是实现两个信号相位同步的自动控制系统,组成锁相环的基本部件有检相器(PD )、环路滤波器(LF )、压控振荡器(VCO ),其结构图如下所示: 2. 锁相环的基本概念和重要参数指标 锁相是相位锁定的简称,表示两个信号之间相位同步。若两正弦信号如下所示: 相位同步是指两个信号频率相等,相差为一固定值。 ) (sin )sin()()(sin )sin()('t U t U t u t U t U t u o o o o o i i i i i θθωθθω=+==+=
当i ω=o ω,两个信号之间的相位差 为一固定值, 不 随时间变化而变化,称两信号相位同步。 当i ω≠o ω,两个信号的相位差 ,不论i θ 是否等于o θ,只要时间有变化,那么相位差就会随时间变化而 变化,称此时两信号不同步。若这两个信号分别为锁相环的输入和输出,则此时环路出于失锁状态。 当环路工作时,且输入与输出信号频差在捕获带范围之内,通过环路的反馈控制,输出信号的瞬时角频率)(t v ω便由o ω向i ω方向变化,总会有一个时刻使得i ω=o ω,相位差等于0或一个非常小的常数,那么此时称为相位锁定,环路处于锁定状态。若达到锁定状态后,输入信号频率变化,通过环路控制,输出信号也继续变化 并向输入信号频率靠近,相位差保持在一个固定的常数之内,则称环路此时为跟踪状态。锁定状态可以认为是静态的相位同步,而跟踪状态则为动态的相位同步。 环路从失锁进入到锁定状态称为捕获状态。 其他几个环路工作时的重要概念: 快捕带:能使环路快捕入锁的最大频差称为环路的快捕带,记为 L ω?,两倍的快捕带为快捕范围。 捕获带:能使环路进入锁定的最大固有频差,用P ω?表示,两倍的捕获带为捕获范围。 同步带:环路在所定条件下,可缓慢增加固有频差,直到环路失锁,把能够维持环路锁定的最大固有频差成为同步带,用H ω?, o i t t θθθθ-=-)()('o i o i t t t θθωωθθ-+-=-)()()('
本科毕业设计论文 题目锁相环设计与MATLAB仿真 _______________________________________ 专业名称电子科学与技术 学生姓名何鹏 指导教师李立欣 毕业时间2010年6月
毕业 任务书 一、题目 《锁相环设计与MATLAB 仿真》 二、指导思想和目的要求 在了解锁相环的基本工作原理的基础上,熟悉其构成及数学模型,在对锁相环有了充分的要了解后,运用MATLAB 仿真软件对其进行仿真。通过仿真看锁相环是否工作正常,参数指标是否合格来判断是否达到了仿真要求。 三、主要技术指标 1.锁相环的基本原理 2.锁相环工作期间是否经历了失锁、跟踪、捕获、锁定等四个状态。 3.锁定后平率相位是否平稳。 四、进度和要求 第3~5 周:查阅和整理资料文献,确定研究模型和研究方向; 第6~8 周:分析模型,找出其中的缺陷; 第9~11 周: 提出更容易实现的结构,对该结构具体分析; 第11~13 周:整理资料进行论文撰写、装订并翻译英文文献; 第14~15 周: 论文评阅,答辩准备,答辩 五、主要参考书及参考资料 Floyd M .Gardner,锁相环技术(第三版)姚剑清 译,人民邮电出版社,2007 Roland E.Best,锁相环设计、仿真与应用(第五版),李永明 等译,清华学出版社,2007.4 学生 ___________ 指导教师 ___________ 系主任 ___________ 设计 论文
目录 中文摘要 (3) 英文摘要 (4) 前言 (6) 第一章绪论 (7) 1.1 锁相环的发展及国内外研究现状 (7) 1.2 本文的主要内容组织 (9) 第二章锁相环的基本理论 (10) 2.1锁相环的工作原理 (11) 2.1.1鉴相器 (11) 2.1.2 低通滤波器 (13) 2.1.3 压控振荡器 (15) 2.2锁相环的工作状态 (15) 2.3锁相环的非线性工作性能分析 (17) 2.3.1跟踪性能 (18) 2.3.2捕获性能 (18) 2.3.3失锁状态 (19) 2.4锁相环的稳定性 (20) 2.5信号流程图 (21) 2.6锁相环的优良特性 (21) 2.7锁相环的应用 (22) 2.7.1锁相环在调制和解调中的应用 (22) 2.7.2锁相环在频率合成器中的应用 (23) 2.8本章小结 (23) 第三章锁相环的噪声分析 (24)
%%***********************************************% % author: sjqian % date: 2013 07 17 % description: %**************************************************** %*************system initial************************* clc; clear all; close all; Legtick=['g-o';'k-x';'b-v';'r-o';'m-x';'c-v';'r-s';'y-v';'g-s';'k-x';'b-o';]; adB=10; Qb=10; % generate input signal f=100; fs=400; Ts=1/fs; N=10;% depth of lookuptable resulution=fs/(2^N); freqCon=round(f/resulution); Kd=2^(adB+Qb); K0=2*pi/(2^N); loop=1; BL=10; BWacq=0.42*BL; wn=BL/0.53; Tacq=1.2/BL/Ts; Gain=Kd*K0; zeta=sqrt(2)/2; c1=2*zeta*wn*Ts/Gain; c2=(wn*Ts)^2/Gain; t=0/fs:1/fs:2;
fmod=f+BWacq; a=2^adB*sin(2*pi*fmod*t+pi/6)+10*randn(1,length(t)); a=round(a); b=zeros(1,length(a)); index=(0:2^N-1)/(2^N); table=round(2^Qb*sin(2*pi*index)); phaseindex=freqCon+1; b(1)=table(1);b(2)=table(freqCon+1); path2(1)=0; for i=2:length(t) dp(i)=a(i-1)*b(i)-a(i)*b(i-1); path1=c1*dp(i); path2(i)=path2(i-1)+c2*dp(i); phaseindex=phaseindex+freqCon+path1+path2(i); phaseindex=mod(round(phaseindex),2^N); b(i+1)=table(phaseindex+1); end figure; plot(a); hold on; plot(b,'r'); title('timing waveform'); grid on; figure; plot(dp); stit=sprintf('phase detector output,converge time=%d point',Tacq); title(stit); grid on; figure; plot(path2*resulution); title({'frequency offset estimation value ',num2str(BWacq)});
自动控制理论 上 机 实 验 报 告 学院:机电工程学院 班级:13级电信一班 姓名: 学号:
实验四 PID 控制系统的Simulink 仿真分析 一、实验目的和任务 1.掌握PID 控制规律及控制器实现。 2.掌握用Simulink 建立PID 控制器及构建系统模型与仿真方法。 二、实验原理和方法 在模拟控制系统中,控制器中最常用的控制规律是PID 控制。PID 控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差。PID 控制规律写成传递函数的形式为a s K s Ki K s T s T K s U s E s G d p d i p ++=++==)11()()()( 式中,P K 为比例系数;i K 为积分系数;d K 为微分系数;i p i K K T = 为积分时间常数;p d d K K T =为微分时间常数; 简单来说,PID 控制各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立 即产生控制作用,以减少偏差。 (2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决 于积分时间常数i T ,i T 越大,积分作用越弱,反之则越强。 (3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。 三、实验使用仪器设备 计算机、MATLAB 软件 四、实验内容(步骤) 1、在MATLAB 命令窗口中输入“simulink ”进入仿真界面。 2、构建PID 控制器:(1)新建Simulink 模型窗口(选择“File/New/Model ”),在Simulink Library Browser 中将需要的模块拖动到新建的窗口中,根据PID 控制器的传递函数构建出如下模型:
锁相环 一、实验原理 许多电子设备要正常工作,通常需要外部的输入信号与内部的振荡信号同步,利用锁相环路就可以实现这个目的。锁相环通常由鉴相器(PD)、环路滤波器(LF)和压控振荡器(VCO)三部分组成,锁相环组成框图如图1所示。 )t 图1 锁相环基本原理框图 图1所示的是锁相环基本原理框图。锁相环路是一种反馈控制电路,简称锁相环(PLL)。锁相环的特点是:利用外部输入的参考信号控制环路内部振荡信号的频率和相位。 因锁相环可以实现输出信号频率对输入信号频率的自动跟踪,所以锁相环通常用于闭环跟踪电路。锁相环在工作的过程中,当输出信号的频率与输入信号的频率相等时,输出电压与输入电压保持固定的相位差值,即输出电压与输入电压的相位被锁住,这就是锁相环名称的由来。 锁相环中的鉴相器又称为相位比较器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成u d(t)电压信号输出,该信号经低通滤波器滤波后形成压控振荡器的控制电压u c(t),对振荡器输出信号的频率实施控制。 锁相环法载波提取: 当u i(t)为固定频率正弦信号(θi(t)为常数)时,在环路的作用下,VCO输出信号频率可以由固有振荡频率ωo(即环路无输入信号、环路对VCO无控制作用是VCO的振荡频率),变化到输入信号频率ωi,此时θo(t)也是一个常数,u d(t)、u c(t)都为直流。称此为环路的锁定状态。定义△ω=ω-ωo为环路固有的频率差,△ωp表示环路的捕捉带,△ωh表示环路的同步带,模拟锁相环中△ωp<△ωh。当|△ωo|<△ωp时,环路可以进入锁定状态;当|△ωo|<△ωh时,环路也可以保持锁定状态;当|△ωo|>△ωp时,环路不能进入锁定状态,环路锁定后若△ωo发生变化使|△ωo|>△ωh,环路也不能保持锁定状态。这两种情况下,环路都将处于失锁
实验七Simulink仿真技术 1 实验目的: 了解对动态系统进行建模、仿真与分析工具-------Simulink 掌握Simulink仿真的方法和步骤 2 实验相关的知识重点: Simulink是MATLAB下的一个软件包。使用Simulink进行仿真一般分为两步: 1、在仿真模型编辑窗口中搭建好自己的仿真模型,设置好具体模型参数和仿 真参数; 2、开始仿真,Simulink将根据用户搭建的模型,模拟系统在用户设定条件下 的具体行为。 一个典型的Simulink模型由信源、系统及信宿等3部分组成可,它们的关系如下图所示: 信源提供系统的输入信号,如常量、正弦波、方波等;系统是对仿真对象的数学抽象,比如是连续线性系统,还是连续非线性系统?对输入信号进行求和,还是对输入信号进行一次调制:信宿是收信号的的部分,用户可以把它送到“示波器”中显示出来,或者保存到相应的mat文件中去。 一、模型文件操作 Simulink所建立的模型文件的后缀名为*.mdl。模型文件实际是一个结构化了的ASCII文件,它描述了模型的关键字和参数。同MATLAB的M文件一样它可以进行新建、打开、保存、打印等操作。 二、模块的操作 1. 模块的选定: 2.模块大小的调整: 3.模块方向的调整: 4.模块位置的调整: 5.模块的删除: 6.模块参数的设置 三、信号线的操作 1.信号线的连接: 2.信号线的折曲: 3.折点的移动: 4.信号线的删除: 5.信号线的标签: 6.信号线标签的传递: 四、模型的注释
建立Simulink模型应该养成添加模型注释的良好习惯。方法是:在模型编辑窗任意位置双击鼠标左键,将弹出一个编辑窗,可以在其中写入注释内容。 在模块库浏览器中的Simulink结点下包含了搭建一个Simulink模型所需的基本模块,这些是首先应该掌握的。下面主要对其中的Sources模块库、Sinks 模块库、Continuous模块库、Discrete模块库、Math Operations模块进行介绍。 一、Sources模块库 主要用于给Simulink仿真模型提供输入信号 1. Sine Wave模块 2.From Workspace模块 3.From File模块 二、Sinks模块库 主要功能是接收信号,并且将接收到的信号显示出来 1. 示波器的工具栏 2. 坐标轴的范围调整 三、Continuous模块库 主要用于对连续系统的建模。 四、Discrete模块库 主要用于离散系统建模。这类系统在时域上一般用差分方程来描述,或者在频域上利用Z变换得到传递函数进行描述. 五Math Operations模块库 主要用于对输入信号进行数学操作,包括逻辑运算和关系运算. 六其他模块库中的内容 基本模块库中还包括很多其他模块,另外,Simulink还可以由Blocksets来扩展它的功能.例如,利用DSP Blockset仿真数字信号处理的问题,利用Communication Blockset, CDMA Reference Blockset可以仿真通信领域的问题. 3 实验题目: 1.打开Simulink的模块库浏览器,仔细观察Simulink的基本模块, 它们是如何分类组织起来的?这样,在实际使用中才能快速、正确地查到自己所需要的模块。 2.用信号发生器产生频率1GHz,最高幅度为2的正弦波,用示波器 显示出来;用信号发生器产生幅度为2 ,频率10MHz, 占空比1/2的方波信号,用示波器显示。 3.为什么要封装子系统,如何封装?举例说明。