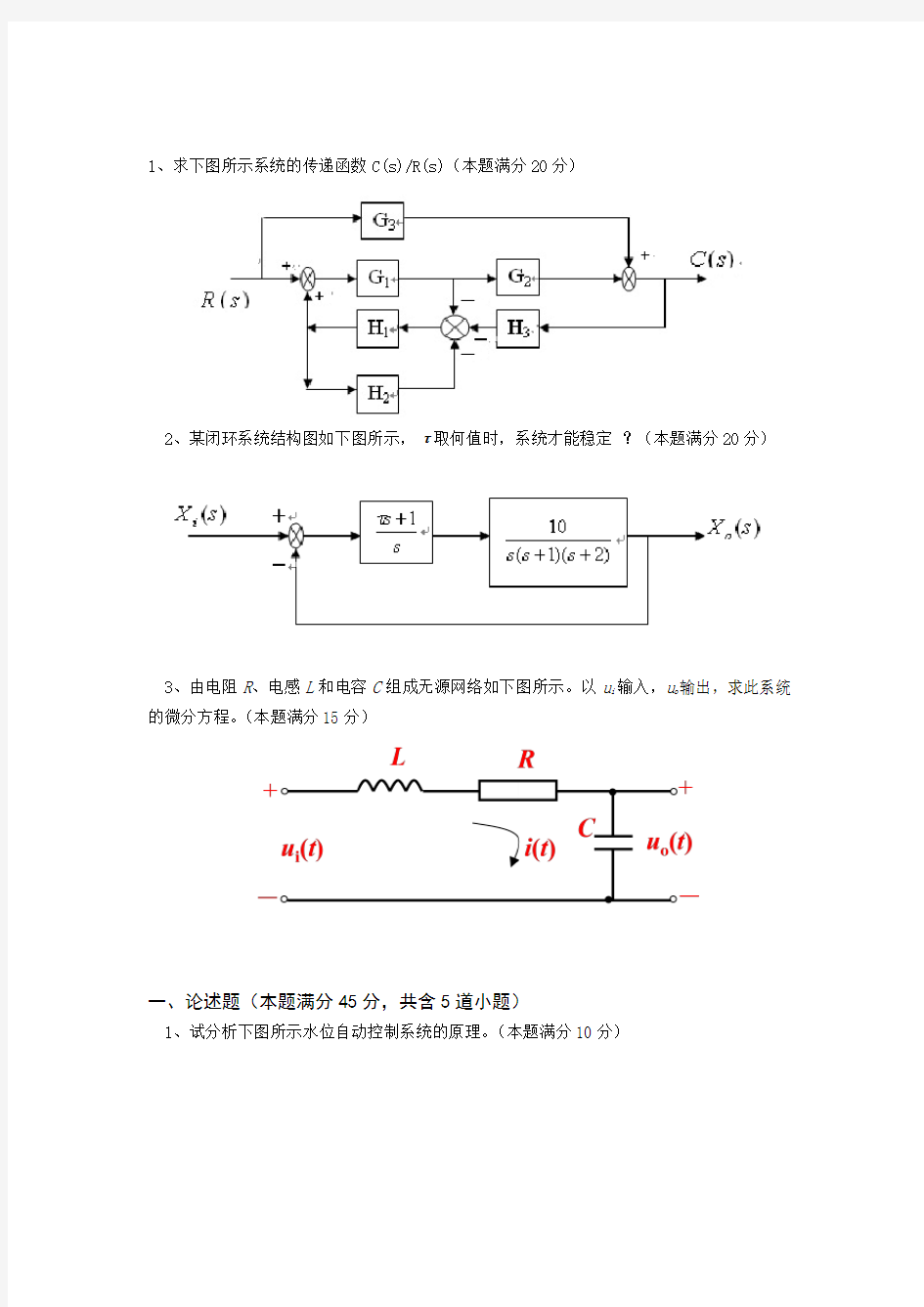

1、求下图所示系统的传递函数C(s)/R(s)(本题满分20分)
2、某闭环系统结构图如下图所示,τ取何值时,系统才能稳定?(本题满分20分)
3、由电阻R、电感L和电容C组成无源网络如下图所示。以u i输入,u o输出,求此系统的微分方程。(本题满分15分)
一、论述题(本题满分45分,共含5道小题)
1、试分析下图所示水位自动控制系统的原理。(本题满分10分)
2、写出如何利用梅森(Mason)公式得到系统传递函数。(本题满分10分)
3、求取无源网络或电子调节器的传递函数,采用阻抗法求取更为方便。写出下表中列出的电阻、电容和电感的阻抗的微分方程与传递函数。(本题满分10分)
4、对控制系统的“稳”的要求,具体是什么含义?对系统的“准”的要求,含义又是什么? (本题满分5分)
5、解释闭环控制系统中比较元件、校正元件、执行元件、被控对象(或过程)的含义。(本题满分10分)
1、求系统传递函数C(s)/R(s)(本题满分10分)
系统的开环传递函数成为
2
n
2
n n ()
(2)
f
G s
s s K s
ω
ζωω
=
++
闭环传递函数为
2、化简如下所示系统框图,求化简后的传递函数
求系统传递函数C(s)/R(s)(本题满分15分)
2、系统结构图如图所示,τ取何值时,系统才能稳定?(本题满分10分)
3、已知
1 [()]
()
(1)
L f t F s
s s
==
+,试求lim()
t
f t
->∞。(本题满分8分)
解:
1
()(1)
sF s s
=+
的极点位于左半s平面,所以极限存在。用终值定理:
000
1
lim()()lim()lim lim1
(1)1
t s s s
s
f t f sF s
s s s
->∞->->->
=∞====
++
4、一个由弹簧-质量-阻尼器组成的机械平移系统如图所示。m为物体质量,k为弹簧系数,
f 为粘性阻尼系数,外力F(t)为输入量,位移x(t)为输出量。列写系统的运动方程。
解在物体受外力F的作用下,质量m相对于初始状态的位移、速度、加速度分别为x、dx/dt、d2x/dt2 。设外作用力F为输入量,位移 x 为输出量。根据弹簧、质量、阻尼器上力与位移、速度的关系和牛顿第二定律,可列出作用在上的力和加速度之间的关系为
22d x dx m F f kx dt dt
=-- 22()()()()d x t dx t m f kx t F t dt dt
++=
k 和f 分别为弹簧的弹性系数和阻尼器的粘性摩擦系数。 负号表示弹簧力的方向和位移的方向相反; 粘性摩擦力的方向和速度的方向相反。
5、由电阻R 、电感L 和电容C 组成无源网络如下图所示。u i 输入,u o 输出,求微分方程。
设回路电流为 i ( t ) 如图所示。由基尔霍夫电压定律可得到:
()
()()()o i di t L
Ri t u t u t dt
++= 式中i ( t )是中间变量。i ( t )和u o( t )的关系为
()
()o du t i t C
dt
= 消去中间变量i (t ),可得
22
()()()()o o o i d u t du t LC RC u t u t dt dt
++= 5、系统的特征方程为:432
235100s s s s ++++=,试判据判断系统的稳定性。()
6、某典型反馈控制系统的结构如下图所示,输入量、干扰量同时作用于线性系统,求扰动作用下的闭环传递函数C(s)/D (s)。
5、一位置随动系统,如下图所示,K =4。求①该系统的阻尼比、自然振荡角频率和单位阶跃响应;②系统的峰值时间、调节时间和超调量(取5%误差带);③若要求阻尼比等于0.707,应怎样改变系统放大系数K 值。
解 系统的闭环传递函数为
2
4
()4
s s s Φ=
++ 42(rad /s)n ω==
p 2
2
n 1.62(s)1210.25
t ωζ
=
=
≈--
s n
3
3
(5%)6(s)0.252
t ζω=
=
=?
2
/
1%100%47%e πζζσ--=?≈
要求阻尼比等于0.707,2
()K
s s s K
Φ=
++ 2
n n 1(rad /s),0.522
K ωωζ=
=== 4、求图示电路的传递函数
解: 令11Z R Ls =+,221
Z R Cs
=+
则12
1
()()()o i U s Z Z G s U s Z +=
= 21211R Cs
R Ls R Cs
+
=
+++
22121
()1
R Cs LCs R R Cs +=
+++
二、论述题(本题满分48分,共含5道小题)
1、某控制系统机构如下图所示,试分析图中测量元件、比较元件、执行元件的作用。
2、试分析水位自动控制系统的原理。(本题满分8分)
3、试总结建立控制系统微分方程的一般步骤。
(1)分析元件的工作原理和在系统中的作用,确定元件的输入量和输出量(必要时还要考虑扰动量),并根据需要引进一些中间变量。
(2)根据各元件在工作过程中所遵循的物理或化学定律,按工作条件忽略一些次要因素,并考虑相邻元件的彼此影响,列出微分方程。常用的定律有:电路系统的基尔霍夫定律、力学系统的牛顿定律和热力学定律等等。
(3)消去中间变量后得到描述输出量与输入量(包括扰动量)关系的微分方程,即元件的数学模型。
试分析水位自动控制系统的原理。
当实际水位低于要求水位时,电位器输出电压值为正,且其大小反映了实际水位与水位要求值的差值,放大器输出信号将有正的变化,电动机带动减速器使进水阀门开度增加,直到
实际水位重新与水位要求值相等时为止。
3、试解释何为开环控制,何为闭环控制。(本题满分10分)
3、试总结绘制控制系统根轨迹的基本法则。(本题满分15分)
4、试总结对自动控制系统的三个基本要求。(本题满分9分)
桥梁工程复习题 填空题 公路桥梁的作用按其随时间变化的性质,分为永久作用、可变作用、偶然作用。 桥梁的下部结构包括 桥台、桥墩、墩台基础 。 钢筋混凝土梁梁内钢筋分为两大类,有有 受力钢筋 和 ___________ 。 作用代表值包括 标准值 _________ 、准永久值 、频遇值 ______________________ 。 设计钢筋混凝土简支 T 梁,需拟定的主要尺寸有 梁宽 、梁高 、腹板 厚度 _____ 、翼缘板厚度 ____________ 。 柱式桥墩的主要型式主要有 独柱式 ________ 、 双柱式 __________ 、 多柱式 __________ 和 混合式 。 明挖扩大基础的稳定性验算包括 倾覆稳定性 验算和 滑动稳定性 ________________ 验算。 支座按其容许变形的可能性分为 固定支座 、单向支座 和 多向支座 。 常用的重力式桥台有 U 形桥台 ____________ 、 埋置式桥台 ______________ 、八字式桥台 、 —字式桥台 等。 桥梁的主要组成部分包括 桥墩 、 桥台 及 桥跨结构 __________________________ 等。 桥梁设计一般遵循的原则包括 安全性 、适用性 、经济性 、先进性 和美观等。 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12) 13) 14) 15) 16) 17) 18)
荷载横向分布影响线的计算方法主要有:杠杆原理法、偏心压力法、铰
接板法______ 、比拟正交异性板法__________ 。 19)通常将桥梁设计荷载分为三大类:永久荷载、可变荷载、偶然荷载___________ 。 20)公路桥梁设计汽车荷载分为公路-I级、公路-II级 ____________ 两个等级,它包括车道荷载和车辆荷载,其中车辆___________ 荷载用于桥梁结构的局部加载和桥台 验算。 21)桥梁净空包括设计洪水位_____________ 和桥下通航净空_______________ 。 22)柱式桥墩的型式主要有独柱式、双柱式___________________ 、多柱式________ 和混合柱式四种。 23)进行扩大基础验算时,常进行基底的倾覆稳定性和滑动稳定性检算。24)一般说来,桥梁的组成可分为两大部分桥上结构、桥下结构____________ 。 25)桥梁净空包括设计洪水位__________ 和桥下通航水位_____________________ 。 26)预应力筋的主要类型有高强钢丝和钢绞线______________ 、高强度粗钢筋_______________ 和无粘结预应力钢筋__________ 。 27)桥面板的有效工作宽度与板的支撑条件、荷载性质________________ 、荷载位置_______________ 有关。 28)大型桥梁的设计阶段一般分为初步设计、技术设计与施工设计三个阶段。 29)桥面铺装的类型有水泥混凝土、沥青混凝土沥青表面处置和泥结碎^石______ 。 30)桥梁全长规定为:有桥台的桥梁是两个桥台的侧墙或八字墙后端点之间的距离;无桥台的桥梁为桥面系行车道全长。 31)作用在支座上的竖向力有结构自重反力_______________ 、活荷载的支点反力____________ 及其__________ 。 32)支座垫石的作用是调整坡度______________ 。 33)按桥面所在的位置可把拱桥分为上承式拱桥____________ 、中承式拱桥_______________ 和二承式拱桥___________ 。 34)一般重力式梁桥墩台的验算包括截面强度验算_____________ 、抗滑移稳定验算和 ___________ 。
一、填空题 1.控制系统正常工作的首要条件是__稳定性_。 2.脉冲响应函数是t e t g 532)(--=,系统的传递函数为___ ____ 。 3.响应曲线达到过调量的____最大值____所需的时间,称为峰值时间t p 。 4.对于一阶系统的阶跃响应,其主要动态性能指标是___T _____,T 越大,快速性越___差____。 5.惯性环节的奈氏图是一个什么形状______半圆弧 。 二、选择题 1.热处理加热炉的炉温控制系统属于:A A.恒值控制系统 B.程序控制系统 C.随动控制系统 D.以上都不是 2.适合应用传递函数描述的系统是( C )。 A 、单输入,单输出的定常系统; B 、单输入,单输出的线性时变系统; C 、单输入,单输出的线性定常系统; D 、非线性系统。 3.脉冲响应函数是t e t g 532)(--=,系统的传递函数为: A A.)5(32+-s s B.) 5(32-+s s C.)5(32+- s D. )5(32++s s 4.实轴上两个开环极点之间如果存在根轨迹,那么必然存在( C ) A .闭环零点 B .开环零点 C .分离点 D .虚根 5. 在高阶系统中,动态响应起主导作用的闭环极点为主导极点,与其它非主导极点相比,主导极点与虚轴的距离比起非主导极点距离虚轴的距离(实部长度) 要( A ) A 、小 B 、大 C 、相等 D 、不确定 6.一阶系统的动态性能指标主要是( C ) A. 调节时间 B. 超调量 C. 上升时间 D. 峰值时间
7 . 控制系统的型别按系统开环传递函数中的( B )个数对系统进行分类。 A .惯性环节 B . 积分环节 C . 比例环节 D .微分环节 8.对于I 型系统,(A )输入信号稳态误差为零。 A 、单位阶跃 B 、加速度函数 (C) 正弦函数 (D) 单位斜坡 9.在开环零、极点分布已知的情况下,可绘制( C )随系统参数变化(如放大系数)而在s 平面上移动的轨迹(根轨迹)。 A.开环极点 B. 开环零点 C.闭环极点 D. 闭环零点 10.开环传递函数为) 35.0()25.0)(15.0()(+++=s s s s k s G ,其根轨迹的起点为 C A .0,-3 B .-1,-2 C .0,-6 D .-2,-4 11.当∞→ω时比例微分环节的相位是:A A. 90 B. 90- C. 45 D. 45- 三、简答题 1.自动控制的定义是? 再没有人直接参与的情况下,使被控对象的某些物理量准确的按照预期规律变化 2.闭环主导极点的定义? 离虚轴近,又不构成偶极子的极点和零点起作用,决定顺态响应性能。 3. 线性系统稳定的充要条件是? 系统特征方程式的根全部具有负实部 4. 频率特性的定义? 用幅值和相位来描述一个点在极坐标内随 从0变到 时的轨迹,来分析系统的性能的方法 四、分析计算题 1.(10分)已知系统结构如图1所示,化简结构图求传递函数) ()(s R s C
一、单项选择题(在每小题的四个被选答案中,选出一个正确的答案,并将其 答案按顺序写在答题纸上,每小题2分,共40分) 1. 闭环控制系统的特点是 A 不必利用输出的反馈信息 B 利用输入与输出之间的偏差对系统进行控制 C 不一定有反馈回路 D 任何时刻输入与输出之间偏差总是零,因此不是用偏差来控制的 2.线性系统与非线性系统的根本区别在于 A 线性系统有外加输入,非线性系统无外加输入 B 线性系统无外加输入,非线性系统有外加输入 C 线性系统满足迭加原理,非线性系统不满足迭加原理 D 线性系统不满足迭加原理,非线性系统满足迭加原理 3. 2 22 )]([b s b s t f L ++=,则)(t f A bt b bt cos sin + B bt bt b cos sin + C bt bt cos sin + D bt b bt b cos sin + 4.已知 ) (1 )(a s s s F += ,且0>a ,则 )(∞f A 0 B a 21 C a 1 D 1 5.已知函数)(t f 如右图所示,则 )(s F A s s e s e s --+2211 B s s e s s 213 212+-- C )22121(1332s s s s se e e se s ------+ D )221(1s s s e e s e s ----+ 6.某系统的传递函数为 ) 3)(10() 10()(+++= s s s s G ,其零、极点是 A 零点 10-=s ,3-=s ;极点 10-=s B 零点 10=s ,3=s ;极点 10=s
C 零点 10-=s ;极点 10-=s ,3-=s D 没有零点;极点 3 =s
课程试卷一(答案) 一、填空题(15%,每题1.5分。请将正确答案填入下列空格中) 1、桥梁结构在力学上可以归纳为_拉_ 、_压_ 、_弯曲_ 三种基本体系以及他们之间的各种组合。 2、按承台位置的不同桩基础可分为高桩承台和低桩承台。 3、桥墩中线之间的距离,或墩中线至桥台台背前缘之间的距离称为标准跨径。 4、荷载横向分布计算中的第一个脚标表示该荷载引起反力的粱号。 5、在实践中最常遇到的行车道板的受力图式为单向板、悬臂板、铰接悬臂板三种。 6、当跨径、荷载和拱上建筑等情况相同时1/3的拱桥和1/8的拱桥相比,前者的水平推力比后者小。 7、拱桥按主拱圈的横截面形式可分为肋拱、板拱、双曲拱和箱形拱。 8、支座的类型简易支座、钢支座、钢混凝土支座、橡胶支座。 9、桥梁重力式桥墩类型:矩形墩、圆端行墩、圆形墩。 10、拱轴系数m是指拱脚恒载集度与拱顶恒载集度的比值愈大, 拱轴线在拱脚处愈陡。 二、是非判断题(20%,每题2分。请判断下列各题是否正确,正确的在括号内打√,错误的在括号内打×。) 1、在具有主梁和横隔梁的简单梁格体系中,行车道板实际上是双边支承的板。(×) 2、通常荷载横向分布系的值小于1,且没有负值。(√ ) 3、在铰接板法中,采用半波正弦荷载来分析支点荷载横向分布的规律。(×) 4、为了消除恒载挠度而设置的预拱度,其值通常取等于全部恒载和一半静活载所产生的竖向挠度值。(√ ) 5、拱桥的标高主要有:桥面标高、拱顶底边标高、起拱线标高、基础底面标高。(√) 6、任何纵横梁格系结构比拟成的异性板,可以完全仿造真正的材料异性板来求解,只是挠曲微分方程中的刚度常数不同罢了。(√ ) 7、用偏压法计算横隔梁内力的力学模型是将中横隔梁近似地视作竖向支承在多根弹性主梁上的多跨弹性支承简支梁。(√ ) 8、拱圈内力计算主要分为恒载作用下内力计算和裸拱内力计算。(×) 9、拱圈是偏心受压结构,常以最大正(负)弯矩控制设计;而下部结构常以最大水平力控制设计。(√ ) 10、”修正刚性横梁法”是在计算中考虑了主梁的抗扭刚度,而”刚性横梁法”则不予考虑。(√ ) 三、名词解释(15%,每题3分) 1、净跨径 梁式桥的净+径指设计洪水位上相邻两个桥墩(或桥台)之间的净距。 2、永久作用: 在设计使用期内,其作用位置和大小、方向不随时间变化,或其变化与平均值相比可忽略不计。 3、合理拱轴线: 在某一荷载作用下使得拱的各个截面弯矩为零的拱轴线。 4、荷载横向分布系数: 某根梁所承受的最大荷载是各个轴数的倍数。 5、弹性中心:
一、填空题(每题1分,共15分) 1、对于自动控制系统的性能要 求可以概括为三个方面, 即: 、 和 ,其中最基本的要求是 。 2、若某单位负反馈控制系统的前向传递函数为()G s ,则该系统的 开环传递函数 为 。 3、能表达控制系统各变量之间关系的数学表达式或表示方法,叫系统的数学模型,在古典控制理论中系统数学模型 有 、 等。 4、判断一个闭环线性控制系统是否稳定,可采 用 、 、 等方法。 5、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称 为 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 。 6、设系统的开环传递函数为 12(1)(1) K s T s T s ++,则其开环幅 频特性为 ,相频特性 为 。 7、最小相位系统是 指 。 二、选择题(每题2分,共20分) 1、关于奈氏判据及其辅助函数 F(s)= 1 + G(s)H(s),错误的说法是 ( ) A 、 F(s)的零点就是开环传递函数的极点 B 、 F(s)的极点就是开环传递函数的极点 C 、 F(s)的零点数与极点数相同 D 、 F(s)的零点就是闭环传递函数的极点 2、已知负反馈系统的开环传递函数 为221 ()6100 s G s s s +=++,则该系统的 闭环特征方程为 ( )。 A 、2 61000s s ++= B 、 2(6100)(21)0s s s ++++= C 、2 610010s s +++= D 、 与是否为单位反馈系统有关 3、一阶系统的闭环极点越靠近S 平面原点,则 ( ) 。 A 、准确度越高 B 、准确度越低 C 、响应速度越快 D 、响应速度越慢 4、已知系统的开环传递函数为 100 (0.11)(5) s s ++,则该系统的开环增 益为 ( )。 A 、 100 B 、1000 C 、20 D 、不能确定 5、若两个系统的根轨迹相同,则有相同的: A 、闭环零点和极点 B 、开环零点 C 、闭环极点 D 、阶跃响应 6、下列串联校正装置的传递函数中,能在1c ω=处提供最大相位超前角的是 ( )。 A 、 1011s s ++ B 、1010.11s s ++ C 、 210.51s s ++ D 、0.11 101 s s ++
桂 林 电 子 科 技 大 学 试 卷 2013-2014 学年第二学期 课程名称《控制工程基础》(A 卷.闭卷)适用年级或专业) 一、填空题(每题1分,共15分) 1、对自动控制系统的基本要求可以概括为三个方面,即:、快速性和 。 2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为。含有测速发电机的电动机速度控制系统,属于。 3、控制系统的 称为传递函数。一阶系统传函标准形式是,二阶系统传函标准形式是。 4、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为(用G 1(s)与G 2(s)表示)。 5、奈奎斯特稳定判据中,Z = P - R ,其中P 是指 ,Z 是指 ,R 指 。 6、若某系统的单位脉冲响应为 0.20.5()105t t g t e e --=+, 则该系统的传递函数G(s)为。 7、设系统的开环传递函数为 2 (1) (1) K s s Ts τ++,则其开环幅频特性为 ,相频特性为 。 二、选择题(每题2分,共20分) 1、关于传递函数,错误的说法是 ( ) s 的真分D.闭环传递函数的极点决定了系统的稳定性。 2、采用负反馈形式连接后,则 ( ) A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高; C 、一定能使干扰引起的误差逐渐减小,最后完全消除; D 、需要调整系统的结构参数,才能改善系统性能。 3、已知系统的开环传递函数为50 (21)(5)s s ++,则该系统的开环增益为 ( )。 A 、50 B 、25 C 、10 D 、5 4、下列哪种措施对提高系统的稳定性没有效果 ( )。 A 、增加开环极点; B 、在积分环节外加单位负反馈; C 、增加开环零点; D 、引入串联超前校正装置。
一. 填空题(每小题2.5分,共25分) 1. 对控制系统的基本要求一般可以归纳为稳定性、 和 。 2. 按系统有无反馈,通常可将控制系统分为 和 。 3. 在控制工程基础课程中描述系统的数学模型有 、 等。 4. 反映出稳态响应偏离系统希望值的程度,它用来衡量系统 的程度。 5. 一阶系统 1 1 Ts 的单位阶跃响应的表达是 。 6. 有系统的性能指标按照其类型分为时域性能指标和 。 7. 频率响应是线性定常系统对 输入的稳态响应。 8. 稳态误差不仅取决于系统自身的结构参数,而且与 的类型有关。 9. 脉冲信号可以用来反映系统的 。 10. 阶跃信号的拉氏变换是 。 二. 图1为利用加热器控制炉温的反馈系统(10分) 炉温控制系统 图1 炉温控制结构图 试求系统的输出量、输入量、被控对象和系统各部分的组成,且画出原理方框图,说明其工作原理。 三、如图2为电路。求输入电压i u 与输出电压0u 之间的微分方程, 并求该电路的传递函数(10分) 图2 R u 0 u i L C u 0 u i (a) (b) (c)
四、求拉氏变换与反变换(10分) 1.求[0.5]t te - l(5分) 2.求1 3 [] (1)(2) s s s - ++ l(5分) 五、化简图3所示的框图,并求出闭环传递函数(10分)
图3
六、图4示机械系统由质量m 、阻尼系数C 、弹簧刚度K 和外力)(t f 组成的机械动力系统。图4(a)中)(t x o 是输出位移。当外力)(t f 施加3牛顿阶跃力后(恒速信号),记录仪上记录质量m 物体的时间响应曲线如图4(b )所示。试求: 1)该系统的微分方程数学模型和传递函数;(5分) 2)该系统的自由频率n ω、阻尼比ξ;(2分) 3)该系统的弹簧刚度质量m 、阻尼系数C 、弹簧刚度k ;(3分) 4)时间响应性能指标:上升时间s t 、调整时间r t 、稳态误差ss e (5分)。 1.0 x 0 图4(a) 机械系统 图4(b )响应曲线 图4
2015年《桥梁工程技术》期末模拟试题及答案(二) 一、单项选择题(每小题仅有一个正确答案,将正确答案的序号填入括号内,每小题2分,共计30分) 1.拱式桥主要承重构件是( B ) A.梁(板) B.拱圈 C.柔性缆索 D.刚性缆索2.桥梁按长度和跨径分类可分为(C) A.梁式桥、拱式桥、斜拉桥、悬索桥、刚架桥 B.上承式桥、中承式桥、下承式桥 C.特大桥、大桥、中桥、小桥、涵洞 D.木桥、钢桥、圬工桥、钢筋混凝土桥、预应力钢筋混凝土桥 3.桥梁附属结构的作用主要是( D) A.承受车辆荷载,并通过支座将荷载传给墩台 B.抵御路堤的土压力 C.支撑桥面系,并将结构重力和车辆荷载传给地基 D.防止路堤填土向河中坍塌,并抵御水流的冲刷 4.桥面铺装的作用主要是( C ) A.将上部构造的荷载传递到墩台上,同时保证结构的自由变形 B.满足桥梁的变形要求 C.保护行车道板不受车辆轮胎的直接磨耗,扩散车辆轮胎的集中力 D.分隔车辆和行人,保证道路畅通 5.板桥的尺寸拟定主要是拟定板的( B )
A.长度 B.厚度 C.宽度 D.体积 6.桩柱式桥墩一般分为两部分,在地面以上的称为( D ) A.基础 B.桩 C.梁 D.柱 7.台身埋在锥形护坡中,只露出台帽,并且仅由台帽两端的耳墙与路堤衔接的桥台,称为( B ) A.轻型桥台 B.埋置式桥台 C.框架式桥台 D.组合式桥台 8.下列关于桥梁墩台定位测量说法有误的一项是( A ) A.直线桥梁墩台定位所依据的原始资料只有桥轴线控制桩的里程 B.水中桥墩的基础施工定位时,由于水中桥墩基础的目标处于不稳定状态,一般宜采用全站仪测量 C.直线桥墩定位时采用直接丈量法时,钢尺检定、丈量方法与测定桥轴线相同 D.墩台中心测设定位以后,尚需测设墩台的纵横轴线,作为墩台细部放样的依据 9.钻灌注桩施工程序排列正确的一项是( A ) A.桩定位、埋护筒、桩机就位、下钻、清孔、下钢筋笼、下导管、灌混凝土B.桩定位、下导管、埋护筒、桩机就位、下钻、清孔、下钢筋笼、灌混凝土C.桩定位、下钻、埋护筒、桩机就位、清孔、下钢筋笼、下导管、灌混凝土D.桩定位、埋护筒、下钻、清孔、下钢筋笼、桩机就位、下导管、灌混凝土10.钻孔灌注桩施工,抽浆清孔法是指( B ) A.用掏渣筒、大锅锥或冲抓锥清掏孔底粗钻渣
控制工程基础考试卷及答案 西北工业大学考试题(A卷) (考试时间120分钟) 学院:专业:姓名:学号: 一.填空题(共24分,每空1.5分) 1.实现恒温控制有两种方法:人工控制和自动控制。P2 2.若一个元件的输入和输出的关系曲线为直线,则称元件为线性元件。P6 3.系统的数学模型都是线性常系数微分方程,它的一个重要性质是具有齐次 性和叠加性。P13 4.在控制工程中,一般需要确定信号流图中输出和输入间的关系,即系统的 闭环传递函数。P27 5.动态响应是指系统在某一信号的作用下,其输出量从初始状态到稳定状态 的响应过程。P35 6.乃奎斯特图又称为极坐标图或幅相频率特性图。P55 7.最小相位系统是指系统的传递函数在复平面无右极点和右零点的系统。P70 8.系统稳定的充分必要条件是系统的闭环极点均位于s的左半平面。P101 9.系统误差的定义为被控量期望值与实际值之差。P105 10.开环频率特性的低频段表征了闭环系统的稳定特性,中频段表征了闭环系统的动态特性,高频段表征了闭环系统的复杂性。P117 二.判断题(共20分,每空2分) 1.实现自动控制的装置可以不同,但反馈控制的原理却是相同的。P3(√) 2.结构图等效变换的原则是变换后与变换前的输入量和输出量都保持不变。 P22(√) 3.稳态响应是指时间t趋向于无穷小时,系统的输出状态。P35 (×) 4.开环对数幅频特性的渐近线斜率越大、位置越高,对应的开环系统积分个 数越多,放大系数越大。P74 (√)5.对于稳定的系统,()()ω ωj H j G曲线离(-1,j0)点越近,闭环系统稳定程度越高。P97 (×)6.对于一个稳定系统,稳态响应中的暂态分量随着时间的推移逐渐减小并趋 近于零。P106 (√)7.自动控制系统在给定输入信号的作用下,系统的稳态误差与系统的结构、 参数和给定信号的形成有关。P107 (√)8.为满足稳态精度要求,要保持系统有一定的开环增益,超前网络的衰减损
桂林电子科技大学试卷 2013-2014 学年第二学期 课程名称《控制工程基础》(A卷.闭卷)适用年级或专业) 考试时间 120 分钟班级学号姓名 一、填空题(每题1分,共15分) 1、对自动控制系统的基本要求可以概括为三个方面,即:、快速性和。 2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为。含有测速发电机的电动机速度控制系统,属于。 3、控制系统的称为传递函数。一阶系统传函标准形式是,二阶系统传函标准形式是。 4、两个传递函数分别为G1(s)与G2(s)的环节,以并联方式连接,其等效传递函数为() G s,则G(s)为(用G1(s)与G2(s)表示)。 5、奈奎斯特稳定判据中,Z = P - R ,其中P是 指,Z是指,R指。 6、若某系统的单位脉冲响应为0.20.5 ()105 t t g t e e -- =+, 则该系统的传递函数G(s)为。 7、设系统的开环传递函数为 2 (1) (1) K s s Ts τ+ + ,则其开环幅频特性为,相频特性为。 二、选择题(每题2分,共20分) 1、关于传递函数,错误的说法是 ( ) A.传递函数只适用于线性定常系统; B.传递函数不仅取决于系统的结构参数,给定输入和扰动对 传递函数也有影响; C.传递函数一般是为复变量s的真分式; D.闭环传递函数的极点决定了系统的稳定性。 2、采用负反馈形式连接后,则 ( ) A、一定能使闭环系统稳定; B、系统动态性能一定会提高;
C 、一定能使干扰引起的误差逐渐减小,最后完全消除; D 、需要调整系统的结构参数,才能改善系统性能。 3、已知系统的开环传递函数为 50 (21)(5) s s ++,则该系统的开环 增益为 ( )。 A 、 50 B 、25 C 、10 D 、5 4、下列哪种措施对提高系统的稳定性没有效果 ( )。 A 、增加开环极点; B 、在积分环节外加单位负反馈; C 、增加开环零点; D 、引入串联超前校正装置。 5、系统特征方程为0632)(23=+++=s s s s D ,则系统 ( ) A 、稳定; B 、单位阶跃响应曲线为单调指数上升; C 、临界稳定; D 、右半平面闭环极点数2=Z 。 6、下列串联校正装置的传递函数中,能在1c ω=处提供最大相位 超前角的是 ( )。 A 、 1011s s ++ B 、1010.11s s ++ C 、210.51s s ++ D 、0.11101 s s ++ 7、已知开环幅频特性如图1所示, 则图中不稳定的系统是 ( )。 系统① 系统② 系统③ 图1 A 、系统① B 、系统② C 、系统③ D 、都不稳定 8、非单位负反馈系统,其前向通道传递函数为G(S),反馈通道传递函数为H(S),当输入信号为R(S),则从输入端定义的误差E(S)为 ( ) A 、 ()()()E S R S G S =? B 、()()()()E S R S G S H S =?? C 、()()()()E S R S G S H S =?- D 、()()()() E S R S G S H S =- 9、开环频域性能指标中的相角裕度γ对应时域性能指标 ( ) 。 A 、超调%σ B 、稳态误差ss e C 、调整时间s t D 、峰值时间p t 10、已知下列负反馈系统的开环传递函数,应画零度根轨迹的是 ( )。 A 、*(2)(1)K s s s -+ B 、*(1)(5K s s s -+)
* ********* 学 院 20**至20**学年度第*学期 ---班 控制工程基础 试 卷 一、判断题 (10分) 1、系统的误差是以系统的输入端为基准来定义的,而系统的偏差是以系统的输出端为基准来定义的。 ( ) 2、系统的时间响应按振动性质分为自由响应和零 输入响应。 ( ) 3、最大超调量Mp 即与阻尼比有关,又与无阻尼 固有频率有关。 ( ) 4、对于单位反馈系统,稳态偏差等于稳态误差。 ( ) 5、谐振带越宽,反应速度越快。 ( ) 一、填空题(10分) 1、对控制系统的基本要求有:___________,___________,____________。 2、凡是能用____________描述的系统就是线性系统,线性系统的一个最重要特性就是它满足_____________。 3、一阶系统在理想的单位脉冲函数在作用下,其响应函数为_____________ 4、系统的误差是由___________和____________两部分组成的。 5、最大超调量和振荡次数反应了系统的____________________。 6、系统稳定的充要条件是 __________________________________。 三、简答题(15分) 1什么是时间响应?时间响应由哪两部分组成?? 2什么是频率特性? 3什么是相位裕度?什么幅值裕度? 四、计算题(计65分) 1已知系统的动力学方程式如下(10分) ()t y ..+3()()()()t r dt t y t y t y 446. =++? 求出它的传递函数Y(s)/R(s)。 2求出图1所示系统的传递函数X o (s )/ X i (s )。 (10分) 3由试图所示()t f 施加一个3N 的阶跃力,求出质 量m ,阻尼系数c ,弹簧进度系数k 。(15分) 4已知系统的特征方程 ()10532234++++=s s s s s B =0,判断系统的 稳定性。(15分) 5、已知开环频率特性 10 ()()(1)(12)(13) G j H j j j j ωωωωω= +++, 分析系统的稳定性。(15分) 参考答案 一、填空题(10分) 1、系统的稳定性,响应的快速性,响应的准确 性。 2、线性微分方程 3、()T t e T t -=1ω 4、瞬态误差和稳定误差 5、稳定性。 6、系统的全部特征根都有负实部 。 二、判断题(10分) 1、(×)2(×)3、 (√) 4、 (√)5、 (√) 三、简答题(15分) 1 答:时间响应是指系统的响应在时域上的表现形式,或系统地动力学方程在一定初始条件下的解。 按响应的来源分为:零输入响应,零状态响应。 按响应的性质分为:强迫响应,自由响应。 2、线性系统在谐波输入作用下,其稳态输入与输出的幅值比是输入信号的频率ω的函数,称其为系统的幅频特性 稳态输出信号与输入信号的相位差 ()?ω(或称相移)也是ω的函数,称 其为系统的相频特性 试 卷 纸 出卷:_ ***_ 试卷:__ ___ 审批:_____ 人数:______卷
《桥梁工程》(梁桥部分)考试试卷及答案 一、单向选择题(本大题共 20 小题,每小题 1 分,共 20 分)在每小题列出的四个备选项中只有一个是符合题目要求的,请将其代码填写在题后的下划线上。错选、多选或未选均无分。 1、桥梁总长是指。 [A] 桥梁两桥台台背前缘间的距离; [B] 桥梁结构两支点间的距离; [C] 桥梁两个桥台侧墙尾端间的距离; [D] 各孔净跨径的总和。 2 、桥梁的建筑高度是指。 [A] 桥面与桥跨结构最低边缘的高差; [B] 桥面与墩底之间的高差; [C] 桥面与地面线之间的高差; [D] 桥面与基础底面之间的高差。 3 、在影响斜板桥受力的因素中,下列选项中可不作为主要因素考虑的是。 [A] 斜交角Ф ; [B] 宽跨比; [C] 支承形式; [D] 板的厚度。 4 、 T 型梁截面的效率指标是。 [A] 预应力束筋偏心距与梁高的比值; [B] 截面上核心距与下核心距的比值; [C] 截面上、下核心距与梁高的比值; [D] 截面上、下核心距与预应力束筋偏心距的比值。 5 、单向桥面板是指长宽比的周边支承桥面板。 [A] 大于 1 ; [B] 等于或大于 2 ;
[C] 等于或小于 2 ; [D] 小于 2 。 6 、人群荷载属于。 [A] 永久作用; [B] 可变作用; [C] 其他可变荷载; [D] 偶然作用 7 、斜交板桥的最大支承反力发生在。 [A] 钝角附近; [B] 锐角附近; [C] 桥轴线处; [D] 钝角与锐角附近。 8 、箱梁的自由扭转产生。 [A] 纵向正应力和剪应力; [B] 剪应力; [C] 横向正应力和剪应力; [D] 纵向正应力、横向正应力和剪应力。 9 、箱梁的畸变产生。 [A] 纵向正应力、横向正应力和剪应力; [B] 剪应力; [C] 横向正应力和剪应力; [D] 纵向正应力和剪应力。 10、主梁中配置预应力束筋、纵向非预应力主筋、斜筋以及作各种验算时,需要作出主梁的。 [A] 弯矩图; [B] 剪力图; [C] 影响线图;[D] 内力包络图。 11 、桥梁按体系划分可分为。 [A] 梁桥、拱桥、刚架桥、缆索承重桥以及组合体系桥; [B] 简支梁桥、悬臂梁桥、连续梁桥和连续刚构桥; [C] 木桥、钢桥、圬工桥、钢筋砼桥和预应力砼桥; [D] 公路桥、铁路桥、人行桥和农用桥。 12 、桥墩按受力特点可分为。 [A] 实心墩和空心墩; [B] 重力式墩和柔性墩;
桥梁工程复习题 一、填空题 1)公路桥梁的作用按其随时间变化的性质,分为永久作用、可变作用、偶然作用。 2)桥梁的下部结构包括桥台、桥墩、墩台基础。 3)钢筋混凝土梁梁内钢筋分为两大类,有有受力钢筋和构造钢筋。 4)作用代表值包括标准值、准永久值、频遇值。 5)桥梁纵断面设计包括桥梁总跨径的确定、桥梁的分孔、桥面的标高 及桥下净空、桥上及桥头引导纵坡的布置。 6)桥台的常见型式有重力式桥台、轻型桥台、组合式桥台和框架式桥台等。 7)公路桥面构造包括桥面铺装、防水和排水系统、桥面伸缩 装置、人行道及附属设施等。 8)悬索桥主要由桥塔、锚碇、主缆和吊索 等组成。 9)重力式桥墩按截面形式划分,常见的有矩形、圆形、圆端形和 尖端形等。 10)常见的轻型桥台有薄壁轻型桥台、支撑梁轻型桥台、框架式轻型 桥台、组合式轻型桥台等。 11)设计钢筋混凝土简支T梁,需拟定的主要尺寸有梁宽、梁高、腹板 厚度、翼缘板厚度。 12)柱式桥墩的主要型式主要有独柱式、双柱式、多柱式和 混合式。 13)明挖扩大基础的稳定性验算包括倾覆稳定性验算和滑动稳定性验算。 14)支座按其容许变形的可能性分为固定支座、单向支座和多向支座。 15)常用的重力式桥台有 U形桥台、埋置式桥台、八字式桥台、 一字式桥台等。 16)桥梁的主要组成部分包括桥墩、桥台及桥跨结构等。 17)桥梁设计一般遵循的原则包括安全性、适用性、经济性、先进性 和美观等。 18)荷载横向分布影响线的计算方法主要有:杠杆原理法、偏心压力法、铰
接板法、比拟正交异性板法。 19)通常将桥梁设计荷载分为三大类:永久荷载、可变荷载、偶 然荷载。 20)公路桥梁设计汽车荷载分为公路-I级、公路-II级两个等级,它 包括车道荷载和车辆荷载,其中车辆荷载用于桥梁结构的局部加载和桥台验算。 21)桥梁净空包括设计洪水位和桥下通航净空。 22)柱式桥墩的型式主要有独柱式、双柱式、多柱式和混合柱 式四种。 23)进行扩大基础验算时,常进行基底的倾覆稳定性和滑动稳定性检算。 24)一般说来,桥梁的组成可分为两大部分桥上结构、桥下结构。 25)桥梁净空包括设计洪水位和桥下通航水位。 26)预应力筋的主要类型有高强钢丝和钢绞线、高强度粗钢筋和 无粘结预应力钢筋。 27)桥面板的有效工作宽度与板的支撑条件、荷载性质、荷载位 置有关。 28)大型桥梁的设计阶段一般分为初步设计、技术设计与施工设计三个 阶段。 29)桥面铺装的类型有水泥混凝土、沥青混凝土沥青表面处置和泥结碎 石。 30)桥梁全长规定为:有桥台的桥梁是两个桥台的侧墙或八字墙后端点之间的距离;无 桥台的桥梁为桥面系行车道全长。 31)作用在支座上的竖向力有结构自重反力、活荷载的支点反力 及其影响力。 32)支座垫石的作用是调整坡度。 33)按桥面所在的位置可把拱桥分为上承式拱桥、中承式拱桥和下 承式拱桥。 34)一般重力式梁桥墩台的验算包括截面强度验算、抗滑移稳定验算 和墩台顶水平位移的验算。 35)装配式简支梁桥横截面主要有 II形、 T形、箱形等几种形式。
20120712 铁道学院2010-2011学年第1学期 2008级本科班期末考试试卷(A ) 课程名称:控制工程基础 任课教师:希太、明军 考试时间:120分钟 学 号: 姓 名: 班 级: 考试性质(学生填写):正常考试( )缓考( )补考( )重修( )提前修读( ) 注:将所有答案写在后面的答题纸上,最后一页为草稿纸。 一、 填空题(每空1分,15题共20分) 1. 控制系统由 两部分组成。 2. 建立系统数学模型的方法有 和 两种。 3. 按其数学模型是否满足 ,控制系统可分为线性系统和非线性系统。 4. 随动系统是指 。 5. 经典控制理论采用的数学模型主要 以为基础;现代控制理论采用的数学模型主要以为 基础。 6. 工程上常用的线性化方法是 。 7. 广义误差平方积分性能指标特点 。 8. 校正元件按在系统中的连接方式可分为串联校正、 和 等。 9. 系统频率特性指标中的谐振频率是指 。 10.系统传递函数与其单位脉冲响应函数的关系是 。 11.系统稳定的充要条件是 。 12.某线性定常系统的单位斜坡响应为t e t t y 2)(-+=,0≥t 。其单位阶跃响应为 。
13.在工程控制实践中,为使系统有满意的稳定性储备,一般其幅值裕度应满足 。 14.最小相位系统是指 。 15.已知系统开环传递函数为) 1(9)(+=s s s G K ,则系统的固有频率、阻尼比以及单位斜坡输入所引起的稳态误差分别为 、 、 。 二、单项选择题(每题2分,10题共20分) 1.下面关于微分环节的控制作用描述中正确的是: ( ) (A)使相位滞后 (B)减小系统的阻尼 (C)抗高频干扰 (D)使相位超前 2.稳态误差除了与系统的型别、传递函数有关外,还与下述哪一项有关? ( ) (A) 阶次 (B) 振荡频率 (C) 阻尼比 (D) 输入信号类型 3.二阶振荡系统幅值衰减的快慢取决于: ( ) (A) d ω (B)n ξω (C) 特征根实部绝对值 (D) 特征根虚部的分布情况 4.系统输出的拉氏变换完全取决于: ( ) (A)系统的传递函数的极点位置 (B)系统的初始状态、输入及其传递函数 (C)系统的传递函数 (D)系统的固有特性 5.相位滞后校正环节相当于: ( ) (A )低通滤波器 (B )高通滤波器 (C )带通滤波器 (D ) 带阻滤波器 6.下图为一阶系统单位脉冲响应曲线,则下列说明正确的是: ( ) (A) 系统的输出为0,2)(2≥=-t e t t ω (B) 系统的输出为0,)(≥=-t e t t ω (C) 系统传递函数为)12(1)(+=s s G (D) 系统单位脉冲响应调整时间为2s 7. PI 控制类似于: ( ) (A) 增益调整 (B) 相位超前校正 (C) 相位滞后校正 (D) 相位滞后-超前校正 8.某单位反馈系统的闭环传递函数为)2(1)(+=s s G ,则输入t t r 2sin 2)(=时稳态输出的幅值为: ( )
一、(共70题,共150分) 1.梁式桥与拱式桥在受力特征上最大的区别在于( )(2分) A.在竖向荷载作用下,梁式桥有水平反力产生,拱式桥有水平反力产生 B.在竖向荷载作用下,梁式桥有水平反力产生,拱式桥无水平反力产生 C.在竖向荷载作用下,梁式桥无水平反力产生,拱式桥有水平反力产生 D.在竖向荷载作用下,梁式桥无水平反力产生,拱式桥无水平反力产生.标准答案:C 2.在配置式T形梁桥中,为保证各片主梁能相互连接成整体,共同参与受力,需设置( )(2A.纵向正应力和剪应力B.剪应力C.横向正应力和剪应力D.纵向正应力、横向正应力和剪应力.标准答案:B 11.公路桥面构造包括________________、________________、 ________________、________________等。(4分).标准答案:1.桥面铺装;2.防水和排水系统;3.桥面伸缩装置;4.人行道及附属设施;分) A.钢板 B.xx隔板 C.内纵梁 D.腹板 .标准答案:B 3.桥梁的基本组成包括上部结构、下部结构以及( )(2分) A.地基 B.桥跨结构 C.锥坡 D.基础 .标准答案:D 4.在影响斜板桥受力的主要因素中,下列( )不是主要因素。(2分)A.斜交角B.宽跨比C.支承形式D.板的厚度 .标准答案:D 5.人群荷载属于( )(2分) A.永久荷载 B.基本可变荷载 C.其他可变荷载 D.偶然荷载
.标准答案:B 6.我国桥梁设计程序可分为前期工作及设计阶段,设计阶段按“三阶段设计”进行,即( )分) A.上部结构设计、下部结构设计及基础设计 B.初步设计、立面设计与和截面设计 C.桥型设计、截面设计和施工设计 D.初步设计、技术设计与施工设计 .标准答案:D 7.在桥梁施工中,预拱度的大小通常取( )(2分) A.全部xx载所产生的竖向挠度 B.全部恒载和全部活载的所产生的竖向挠度 C.全部恒载和一半活载的所产生的竖向挠度 D.全部活载的所产生的竖向挠度 .标准答案:C 8.桥梁设计和施工中,要进行强度、刚度和稳定性验算,这刚度是指( )(2分)A.应力B.应变 C.挠度(变形) D.预拱度 .标准答案:C 9.顶推法施工适用哪种梁桥?( )(2分) A.等截面预应力混凝土连续xx B.等截面钢筋混凝土连续xx
机械控制工程基础 一、填空题 1. 线性控制系统最重要的特性是可以应用 叠加 原理,而非线性控制系统则不能。 2.反馈控制系统是根据输入量和 反馈量 的偏差进行调节的控制系统。 3. 根据自动控制系统是否设有反馈环节来分类,控制系统可分为__开环_控制系统、_闭环__控制系统。 4. 根据系统输入量变化的规律,控制系统可分为 恒值 控制系统、 随动 控制系统和 程序控制系统。 5. 如果在系统中只有离散信号而没有连续信号,则称此系统为离散(数字)控制系统,其输入、输出关系常用差分方程来描述。 6. 根据控制系统元件的特性,控制系统可分为__线性__ 控制系统、 非线性_控制系统。 7. 线性控制系统其输出量与输入量间的关系可以用 线性微分 方程来描述。 8. 对于一个自动控制系统的性能要求可以概括为三个方面:稳定性、 快速性 和准确性。 9. 在控制工程基础课程中描述系统的数学模型有微分方程 、传递函数等。 10. 传递函数的定义是对于线性定常系统,在零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。 11. 传递函数的组成与输入、输出信号无关,仅仅决定于 系统本身的结构和参数 ,并且只适于零初始条件下的 线性定常 系统。 12. 瞬态响应是系统受到外加作用激励后,从初始状态到最终稳定状态的响应过程。 13. 脉冲信号可以用来反映系统的抗冲击能力。 14. 单位斜坡函数t 的拉氏变换为 21 s 。 15. 单位阶跃信号的拉氏变换是 1/s 。 16.在单位斜坡输入信号作用下,0型系统的稳态误差e ss = ∞ 。 17. I 型系统G s K s s ()() =+2在单位阶跃输入下,稳态误差为 0 ,在单位加速度输入下, 稳态误差为 ∞ 。
1、求下图所示系统的传递函数C(s)/R(s)(本题满分20分) 2、某闭环系统结构图如下图所示,τ取何值时,系统才能稳定?(本题满分20分) 3、由电阻R、电感L和电容C组成无源网络如下图所示。以u i输入,u o输出,求此系统的微分方程。(本题满分15分) 一、论述题(本题满分45分,共含5道小题) 1、试分析下图所示水位自动控制系统的原理。(本题满分10分) 《控制工程基础》复习用
《控制工程基础》复习用 2、写出如何利用梅森(Mason )公式得到系统传递函数。(本题满分10分) 3、求取无源网络或电子调节器的传递函数,采用阻抗法求取更为方便。写出下表中列出的电阻、电容和电感的阻抗的微分方程与传递函数。(本题满分10分) 4、对控制系统的“稳”的要求,具体是什么含义?对系统的“准”的要求,含义又是什么? (本题满分5分) 5、解释闭环控制系统中比较元件、校正元件、执行元件、被控对象(或过程)的含义。(本题满分10分) 1、求系统传递函数C(s)/R(s)(本题满分10分) 系统的开环传递函数成为 闭环传递函数为 2、化简如下所示系统框图,求化简后的传递函数 2n 2 n n ()(2)f G s s s K s ωζωω= ++
《控制工程基础》复习用 求系统传递函数C(s)/R(s)(本题满分15分) 2、系统结构图如图所示,τ取何值时,系统才能稳定 ?(本题满分10分) 3、已知1 [()]()(1)L f t F s s s == +, 试求lim ()t f t ->∞。(本题满分8分) 解: 1 ()(1)sF s s =+的极点位于左半s 平面,所以极限存在。用终值定理 : 001lim ()()lim ()lim lim 1 (1)1 t s s s s f t f sF s s s s ->∞ ->->->=∞====++ 4、一个由弹簧-质量-阻尼器组成的机械平移系统如图所示。m 为物体质量,k 为弹簧系数,f 为粘性阻尼系数,外力F(t)为输入量,位移x(t)为输出量。列写系统的运动方程。