姓名:任明明 班级:机研102 学号:201020122050
连续系统的数字PID 控制仿真
本方法可实现D/A 及A/D 的功能,符合数字实时控制的真实情况,计算机及DSP 的实时PID 控制都属于这种情况。
采用了MA TLAB 语句形式进行仿真。被控对象为一个电机模型传递函数;
Bs Js 1
)s (G 2+=
式中,J=0.0067,B=0.10。
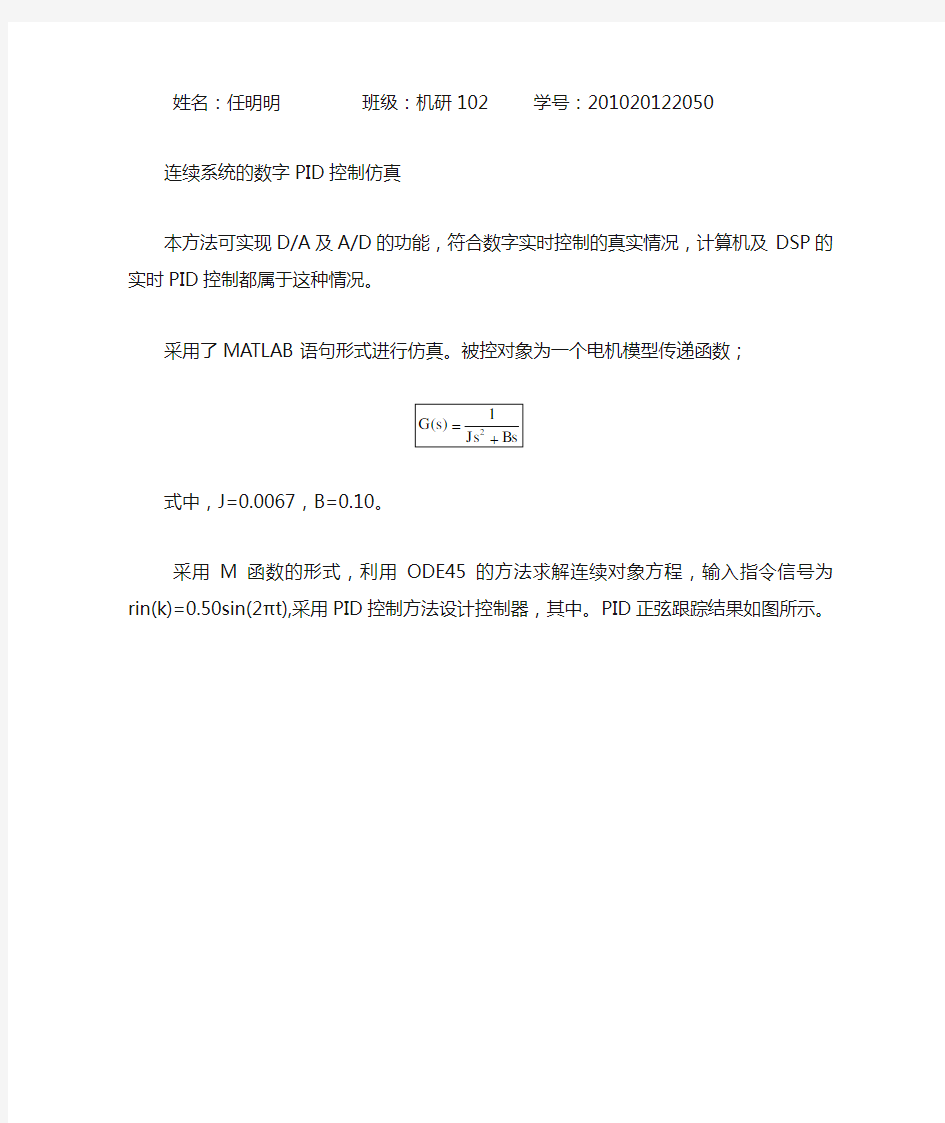
采用M 函数的形式,利用ODE45的方法求解连续对象方程,输入指令信号为rin(k)=0.50sin(2πt),采用PID 控制方法设计控制器,其中。PID 正弦跟踪结果如图所示。
控制主程序:
clear all;
clear all;
ts=0.001; %采样时间
xk=zeros(2,1);
e_1=0;
u_1=0;
for k=1:1:2000
time(k)=k*ts;
rin(k)=0.50*sin(1*2*pi*k*ts);
para=u_1; %D/A
tSpan=[0 ts];
[tt,xx]=ode45('chap1_6f',tSpan,xk,[],para); xk=xx(length(xx),:); %A/D yout(k)=xk(1);
e(k)=rin(k)-yout(k);
de(k)=(e(k)-e_1)/ts;
u(k)=20.0*e(k)+0.50*de(k);
if u(k)>10.0
u(k)=10.0;
end
if u(k)<-10.0
u(k)=-10.0;
end
u_1=u(k);
e_1=e(k);
end
figure(1);
plot(time,rin,'r',time,yout,'b');
xlabel('time(s)'),ylabel('rin,yout');