FANUC Robotics SYSTEM R-J3i C EtherNet/IP
设置总结
1.概述
机器人R-J3iC控制器可以设置16个Scanner或者Adapter。Scanner是指机器人作为master,外围其他设备作为slave(例如焊接控制器等)。Adapter是指机器人为slave,外围设备作为master(例如PLC等)。EtherNet/IP所对应的机器人中I/O设置中的Rack号是89,slot号和设置菜单中的slot号对应。模拟量信号只能在机器人作为Scanner时使用。
2.EtherNet/IP的设置界面
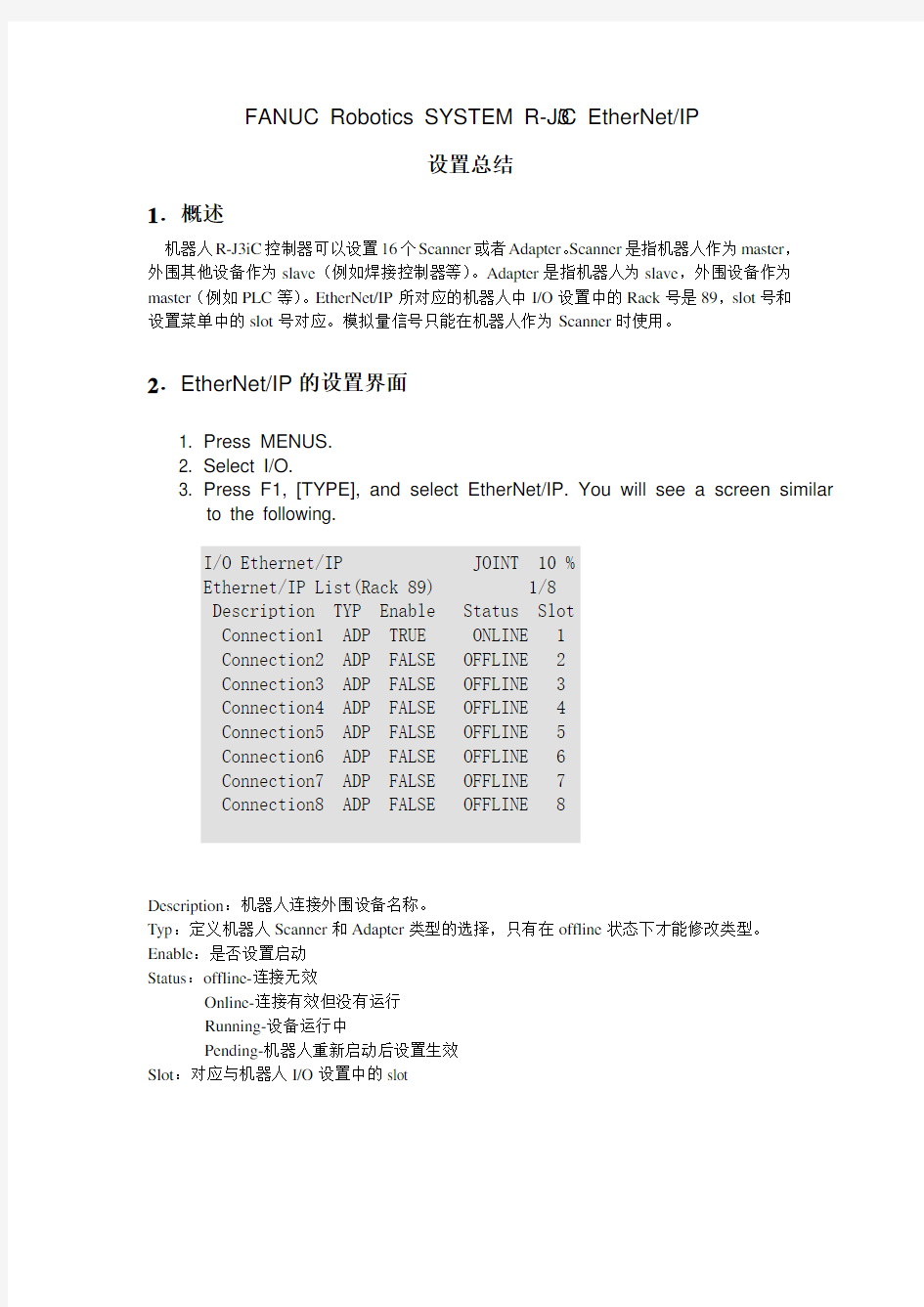
1. Press MENUS.
2. Select I/O.
3. Press F1, [TYPE], and select EtherNet/IP. You will see a screen similar
to the following.
Description:机器人连接外围设备名称。
Typ:定义机器人Scanner和Adapter类型的选择,只有在offline状态下才能修改类型。Enable:是否设置启动
Status:offline-连接无效
Online-连接有效但没有运行
Running-设备运行中
Pending-机器人重新启动后设置生效
Slot:对应与机器人I/O设置中的slot
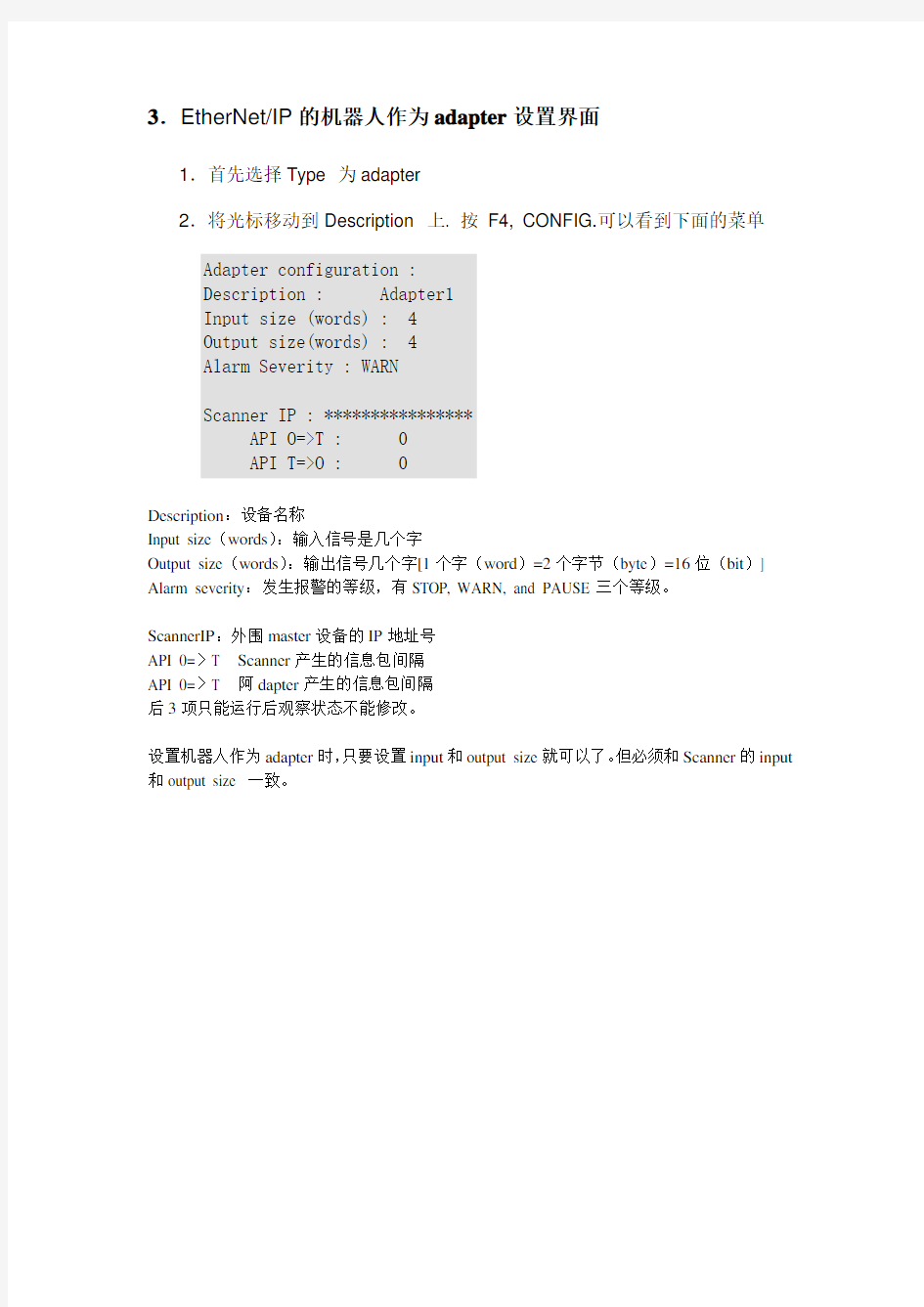
1.首先选择Type 为adapter
2.将光标移动到Description 上. 按F4, CONFIG.可以看到下面的菜单
Description:设备名称
Input size(words):输入信号是几个字
Output size(words):输出信号几个字[1个字(word)=2个字节(byte)=16位(bit)] Alarm severity:发生报警的等级,有STOP, W ARN, and PAUSE三个等级。
ScannerIP:外围master设备的IP地址号
API 0=〉T Scanner产生的信息包间隔
API 0=〉T 阿dapter产生的信息包间隔
后3项只能运行后观察状态不能修改。
设置机器人作为adapter时,只要设置input和output size就可以了。但必须和Scanner的input 和output size 一致。
1.首先选择Type为scanner
2.按F4, CONFIG. 你会看到下面的界面.
Description:机器人所连接的外围设备名称
Name/IP address:机器人所连接的外围设备的IP地址(adapter设备的地址)Vendor Id :外围设备的EDS文件获得
Device Type:外围设备的EDS文件获得
Product Code:外围设备的EDS文件获得
Input size:输入字数
Output size:输出字数
Rpi:反馈信息包间隔
Assembly instance(input):输入信号地址段
Assembly instance(output):输出信号地址段
Configuration instance:外围设备和机器人通讯的要求(从外围设备获得)
关于信号的地址段对应表格: