以施耐德公司的位置控制模板TSXCAY系列为例:
如图所示:
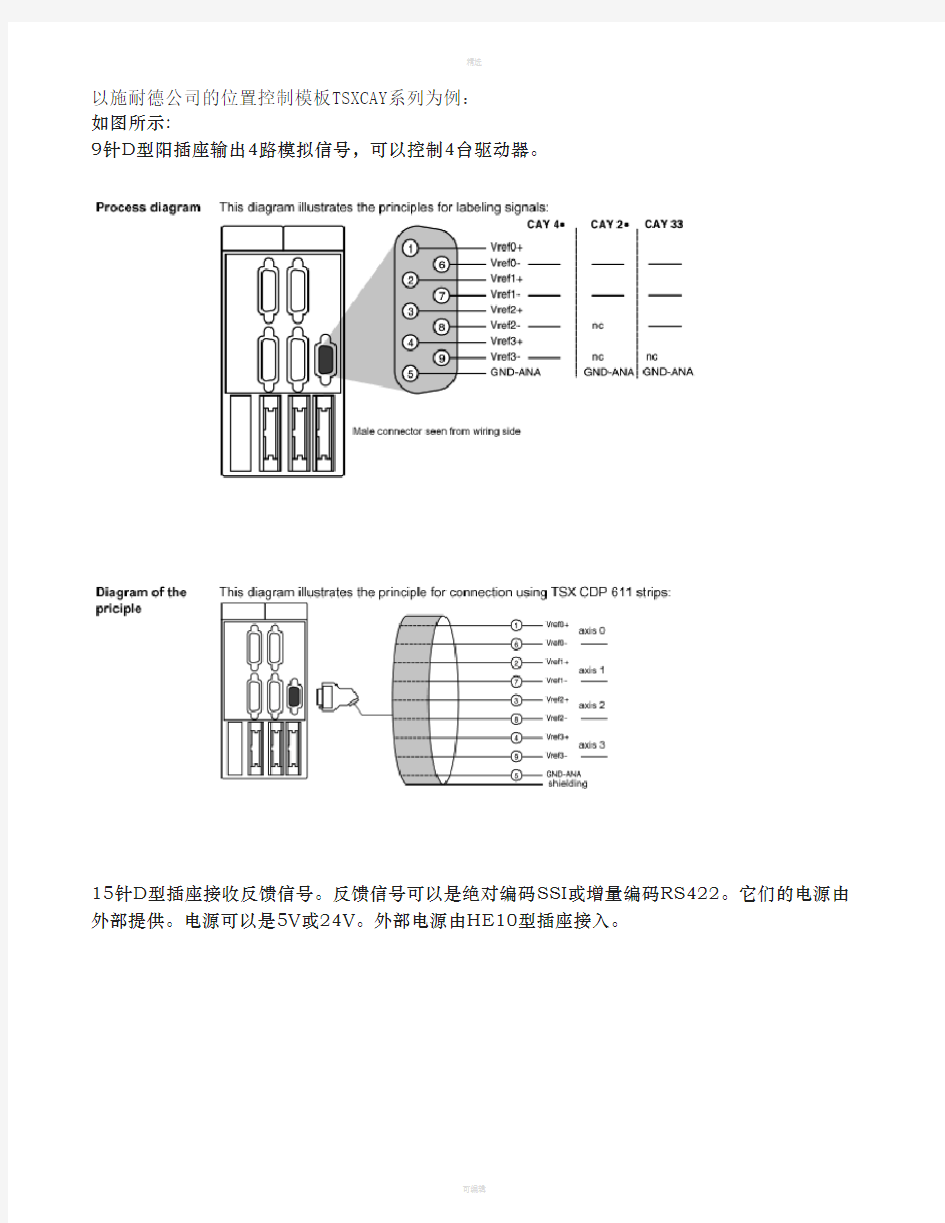
9针D型阳插座输出4路模拟信号,可以控制4台驱动器。
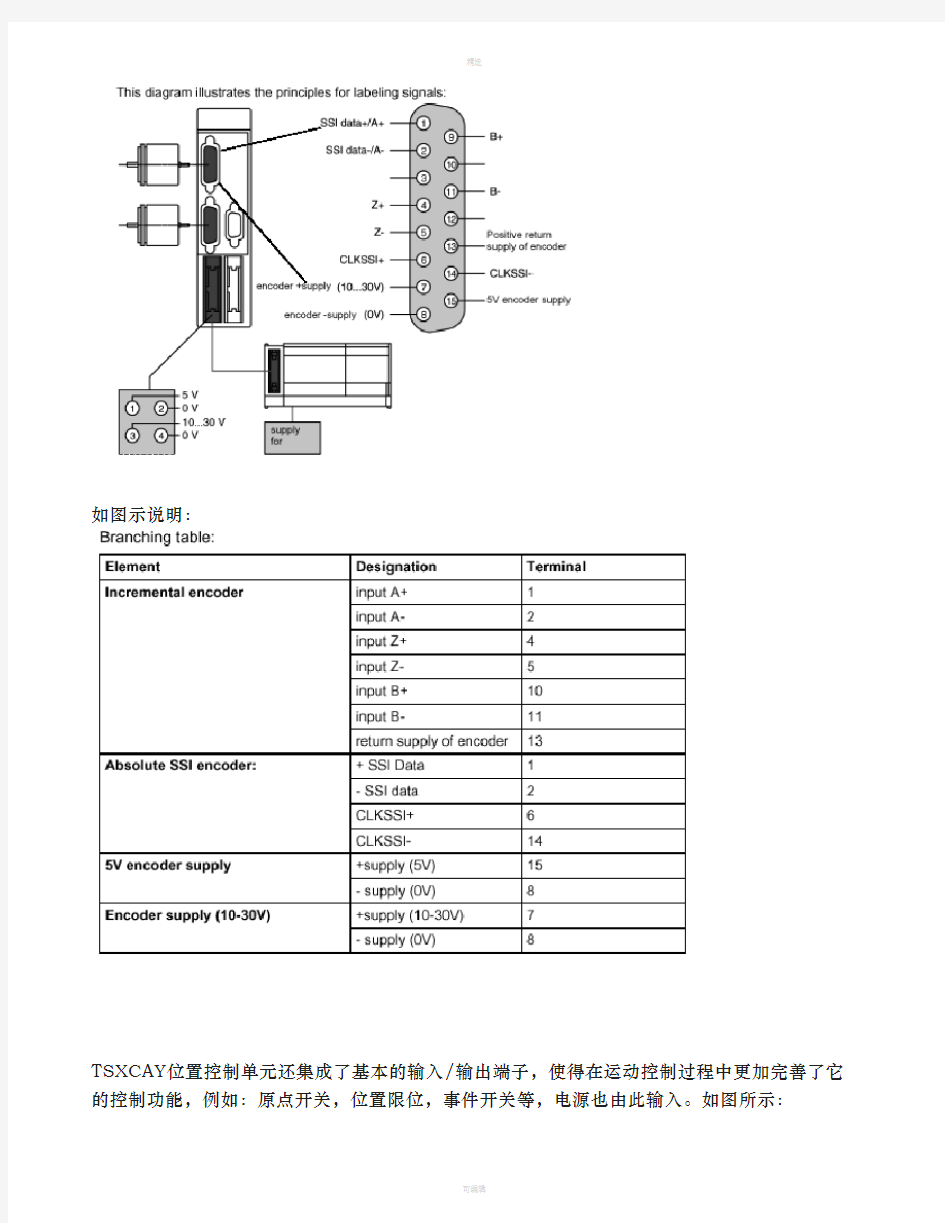
15针D型插座接收反馈信号。反馈信号可以是绝对编码SSI或增量编码RS422。它们的电源由外部提供。电源可以是5V或24V。外部电源由HE10型插座接入。
如图示说明:
TSXCAY位置控制单元还集成了基本的输入/输出端子,使得在运动控制过程中更加完善了它的控制功能,例如:原点开关,位置限位,事件开关等,电源也由此输入。如图所示:
I0: 原点开关
I1: 紧急停止开关
I2: 事件开关
I3: 自较正开关
Q0:辅助输出
下面就是一个在通道0 实际连接的例子。
PO是原点开关,用于程序中的寻原点的执行。
FCD,FCG,AT_UR都是紧急停止开关。
EVT是一个事件开关,可以在程序中进行中断情况的处理。REC可以是自校正的处理开关。
另外,TSXCAY还集成了对驱动单元的管理功能,例如,驱动器的使能,驱动器出错的报警等。如图示:
COMx, VALVARx为输出到相应驱动器的使能控制。
OK_VARx 为驱动器正常工作的输入信号。
连接如图:
TSXCAY 驱动器
综上所述,所有这些硬件构成了位置控制的最基本要素,无论是哪家的产品,结构都基本如此。
2.3 脉冲输出的位置控制结构
如上图所示
脉冲输出对位置的控制,结构简捷,不需要来自电机或驱动器的反馈。运动的位置取决于驱动器接收的脉冲数,运动的速度取决于脉冲的频率。对电流,速度,位置的调节都在驱动器里。它可以实现对位置的点到点的控制和同步跟随控制。
2.4 典型的硬件结构
如图所示
以施耐德公司的步进控制模板TSXCFY系列为例
15针D型插座输出脉冲信号,使能信号。同时也接收来自驱动器的运行状态信号。
连接结构如下图所示:
TSXCFY 驱动器
在TSXCFY模板中也集成有基本的输入/输出点,这些输入/输出点构成了运动控制的完整功能。如限位,原点等。
它们的功能分布如图所示:
这些输入/输出点的连接,都是通过HE10端子连接的,通过这些I/O点,实现了对运动过程中,原点的定位,紧急停车及事件的中断处理。
实际的连接如下图:
2.5 运动控制的软件编程设计
各个伺服产品供应商都为自己的产品配上了相应的控制软件,有的集成在PLC软件中,有的集成在CNC软件中,有的自成体系。但就其编程规律和所要完成的目标基本是一致的。我们以施耐德PREMIUM PLC中的编程语言PL7为例,说明运动控制系统的编程设计。
第六章. 运动控制6.1 运动控制的定义 6.2 运动控制的组成 6.2.1 同步伺服电机 6.2.2 步进电机 6.2.3 驱动器 6.2.4 控制器 6.3 运动控制系统的结构 6.4 运动控制要解决的问题 6.5 伺服电机的选型计算 6.6 典型应用
6.1 运动控制的定义 运动控制是指动作的单元以非常精确的设定速度在规定时间到达准确位置的可控运动. 运动单元的运动有如下特点: 路径: 有一个初始位置 有一个终点位置 稳定的速度和上升,下降斜率 动作: 静态和动态响应非常精确 运动响应很快 运动很稳定 位置: 有绝对位置 有相对位置 根据不同的应用工艺, 我们把运动分为有限轴运动和无限轴运动. 有限轴运动是指运动体的运动在一定范围内, 如机械手的运动在设计范围内抓取工件. 无限轴运动是指运动体连续不断的向一个方向运动,没有边界. 如传送带的运动. 6.2 运动控制的组成 运动控制的组成离不开以下4个单元,如图: 运动控制器: 控制运动按照设定的轨迹动作,不断计算位置和速度的匹配 驱动器: 把普通电能转化为向电机提供运动的动力 电机: 产生对负载推动的扭矩 位置传感器: 提供电机轴实时的位置和速度 所以, 运动控制要完成可控的动作, 主要对3个变量进行控制. 即: 电机的力矩, 速度, 位置 如图所示
6.2.1 同步伺服电机 首先让我们看一下运动控制中的执行器: 伺服电机 电机是把电枢电流转化为电机轴输出力矩的一种装置. 从技术角度, 我们通常把电机分为异步电机, 同步电机和步进电机. 从运动形式来分,可分为旋转电机和直线电机。如图所示:
ATV61参数设置 菜单 [1 变频器菜单] [2 访问等级] [3 打开/另存为] [4 密码] [5 语言选择] [6 监视设置] [7 显示设置] [1 变频器菜单] [1.1简单起动]:用于快速起动的简化菜单 [1.2监视]:显示电流、电机与输入/输出值 [1.3设置]:访问可在运行期间修改的调节参数 [1.4 电机控制]:电机参数(电机铭牌,自整定,开关频率,控制算法等)[1.5输入/输出设置]:I/O设置(缩放比例,滤波,2线控制,3线控制等)[1.6命令]:命令与给定通道的设置(图形显示终端,端子,总线等)[1.7应用功能]:应用功能设置(例如:预置速度,PID等) [1.8 故障管理]:故障管理设置 [1.9通信]:通信参数(现场总线) [1.10诊断]:电机/变频器诊断 [1.11软硬件识别]:变频器与内部可选件的识别 [1.12出厂设置]:访问设置文件并返回出厂设置 [1.13用户菜单]:用户在[7.显示设置]菜单中创建的专用菜单 [1.14内置控制器卡]:可选Controller Inside(内置控制器)卡的设置 [1.1简单起动] ●[2/3线控制]tCC=2C[2线控制] ●[宏配置]CFG=PnF[泵和风机] ●bFr[标准电机频率]= [50 Hz IEC](50):IEC ●nPr[电机额定功率]= ●UnS[电机额定电压]= ●[电机额定电流]nCr= ●FrS[电机额定频率]=
●nSP[电机额定速度]= ●tFr[最大输出值频率]= ●tUn[自整定]= [No](nO)/ [Yes](YES)/ [电阻已整定](dOnE) ●tUS[自整定状态] ?[电阻未整定](tAb):默认的定子阻抗值用于控制电机。 ?[整定等待中](PEnd):已经请求自整定,但还未执行。 ?[整定进行中](PrOG):正在执行自整定。 ?[整定失败](FAIL):自整定失败。 ?[电阻已整定](dOnE):自整定功能测出的定子阻抗被用于控制电机。 ●PHr ?[ABC相序](AbC):正相序 ?[ACB相序](ACb):反相序 ●ItH[电机热保护电流]=0~1.2Ln ●ACC[加速时间]=60S ●dEC[减速时间]=60S ●LSP[低速频率]=0.1HZ ●HSP[高速频率]=50HZ [1.6命令](CtL-) ●Fr1[给定1通道] ?[AI1给定](AI1):模拟输入 ?[AI2给定](AI2):模拟输入 ?[AI3给定](AI3):模拟输入,如果已经插入 VW3A3202扩展卡 ?[AI4给定](AI4):模拟输入,如果已经插入 VW3A3202扩展卡 ?[图形终端](LCC):图形显示终端 ?[Modbus](Mdb):集成的Modbus总线 ?[CANopen](CAn):集成的CANopen总线 ?[通信卡](nEt):通信卡(如果已经插入) ?[控制器内置卡](APP):Controller Inside(内置控制器)卡(如果已经插入)?[RP](PI):频率输入,如果已经插入VW3A3202扩展卡 ?[编码器输入](PG):编码器输入,如果已经插入编码器卡 ●CCS[命令通道切换]= [通道1有效](Cd1):[命令通道1](Cd1)被激活(不能切换)●Cd1[命令通道1] ?[端子排](tEr):端子 ?[图形终端](LCC):图形显示终端 ?[Modbus](Mdb):集成的Modbus总线 ?[CANopen](CAn):集成的CANopen总线 ?[通信卡](nEt):通信卡(如果已经插入) ?[编程卡](APP):Controller Inside(内置控制器)卡(如果已经插入) 注意:组合模式](CHCF)= [隔离通道](SEP)或[I/O 模式](IO),此参数可以使用。 ●Cd2[命令通道2] ?[端子排](tEr):端子 ?[图形终端](LCC):图形显示终端 ?[Modbus](Mdb):集成的Modbus总线 ?[CANopen](CAn):集成的CANopen总线
ATS技术操作规程 一.送电前检查 1.检查接线是否正确 检查ACP(辅助控制板)与BA或UA(控制器)之间9#.10#连接端子对应是否正确; 检查ACP上P25M与断路器之间接线是否正确(详见“ATS接线”单页) 2.检查BA或UA控制器顶部17#.18#;20#.21#端子是否安装,17#.18#;20#21#已分别短封好; 3.检查断路器电操左下方的手动(manu)和电动(auto)切换拨钮是否在 “auto”位置; 4.检查电操与BA或UA控制器的操作电压是否一致(220V~或380V~); 5. 检查ATS装置无异物; 6.检查ACP上P25M是否已在合闸位置。 二.操作试验 1.预设电源转换时间: 通过控制器右上方时间整定钮调整; 2.将BA或UA控制器上的选择开关置于“STOP”位置,将ACP上“N(工作电源)”及“R(备用电源)”侧 P25M分别合闸(两台断路器电操储能)。 3.将BA或UA控制器上的选择开关转到“auto”位, N断路器合闸,BA或UA“N”、“R”侧ON或OFF指 示断路器的合分状态。观察控制器指示与断路器电操上的ON. OFF位置应一致; 4.将ACP上N侧P25M开关分断模拟电源故障, 此时N侧断路器分断;R侧断路器合闸(系统自动转换到备 用电源R侧); 合上N侧开关,电源应自动恢复到主电源(N)侧合闸---自投自复功能; 5.将N侧断路器下端的故障试验推杆按入(模拟负荷故障),N侧断路器断开BA或UA控制器的N侧Fault 指示灯亮(红色),电源并不转换到备用侧; 手动拨N侧断路器电操的储能手柄2次,(N侧断路器储能、合闸)故障复位,控制器N侧Fault指示灯灭, 恢复原始状态; 6.将BA或UA控制器选择开关置“R”位, 则ATS强制在备用电源侧运行; 同样再置“N”位, ATS强制在工 作电源运行,此操作过程中,控制器电源指示均正常;
以施耐德公司的位置控制模板TSXCAY系列为例: 如图所示: 9针D型阳插座输出4路模拟信号,可以控制4台驱动器。 15针D型插座接收反馈信号。反馈信号可以是绝对编码SSI或增量编码RS422。它们的电源由外部提供。电源可以是5V或24V。外部电源由HE10型插座接入。
如图示说明: TSXCAY位置控制单元还集成了基本的输入/输出端子,使得在运动控制过程中更加完善了它的控制功能,例如:原点开关,位置限位,事件开关等,电源也由此输入。如图所示:
I0: 原点开关 I1: 紧急停止开关 I2: 事件开关 I3: 自较正开关 Q0:辅助输出 下面就是一个在通道0 实际连接的例子。 PO是原点开关,用于程序中的寻原点的执行。 FCD,FCG,AT_UR都是紧急停止开关。 EVT是一个事件开关,可以在程序中进行中断情况的处理。REC可以是自校正的处理开关。
另外,TSXCAY还集成了对驱动单元的管理功能,例如,驱动器的使能,驱动器出错的报警等。如图示: COMx, VALVARx为输出到相应驱动器的使能控制。 OK_VARx 为驱动器正常工作的输入信号。 连接如图: TSXCAY 驱动器
综上所述,所有这些硬件构成了位置控制的最基本要素,无论是哪家的产品,结构都基本如此。 2.3 脉冲输出的位置控制结构 如上图所示 脉冲输出对位置的控制,结构简捷,不需要来自电机或驱动器的反馈。运动的位置取决于驱动器接收的脉冲数,运动的速度取决于脉冲的频率。对电流,速度,位置的调节都在驱动器里。它可以实现对位置的点到点的控制和同步跟随控制。 2.4 典型的硬件结构 如图所示 以施耐德公司的步进控制模板TSXCFY系列为例
施耐德LEXIUM15系列伺服的CANOPEN控制 施耐德LEXIUM 15 LP 与MP/HP 伺服应用笔记
目录 接线 端子硬件接线图 4 接线 ON2.8工具软件配置CANOPEN设备LXM 15 6. . 标配置: 程软件下导入*.CO配置文件 9参数设置 3. MING: . PP点到点模式 19 . 速度模式velocity profile 21 一. 概述 3 二.LXM15伺服驱动器的硬件 4 1. LXM15伺服驱动器外部 2 外部24V控制电源接线 5 3. 驱动器与电机的5 4. 外部I/O端子的接线 5 5. 串行通讯接口 5 6. X3接口CANOPEN接线 6 三 利用SYC 3.1.1. 节点配置,添加PDO字. 7 3.1.2PDO字 7 3.1.3Object configuration目8 四 在PLC7编 五 LXM15驱动器10 5.1.1. 基本设置 10 5.1.2. 编码器设置 11 5.1.电机选择 11 5.1.4. POSITION位置参数 11 六. LXM15运动功能的实现12 6.1.1. LXM15的JOG实现 12 6.1.2. 回原点功能HOM 13 6.1.3. 运动任务TASK的实现 16 6.1.46.1.5
一. 概述 Lexium 15应用有多种通讯总线和网络连接可用,包括CANopen , Fipio , Modbus lus 和Profibus DP , 都可以集成到分散自动化架构中。对于多轴应用,您还可以增加: m 15 伺服驱动器的控制性能,适用于需要几轴复杂同步的应用( 凸轮模式,定长切割等)。 PLC OPEN,可以方便与施耐德PLC 通讯,适合高速定位,同步控制,满足复杂机器工艺.CANOPEN 是性价比很高的一种高速控制总线,一个网段下最大64个设备,最大127个设备Lexi 动模式 到点模式,运动任务,电子齿轮 速度控制模式:速度调节 扭矩控制模式 运动控制卡,通过它可以扩展Lexiu SERCOS 选件卡,用于连接到Premium PLC 上的TSX CSY 运动控制模块,这就意味者Lexium 15 伺服驱动器可以满足复杂应用的性能需求。其中LXM15集成CANOPEN 通讯接口,符合,很强抗干扰,完善通讯机制. um 15 伺服驱动器具有多种操作模式: 传统调整模式:原点回归,手 位置控制模式:点
Twido+PTO+Lxm23运动控制系统 Twido+PTO+Lxm23运动控制系统.............................................................................................一第1章前言. (1) 第2章配置要求 (1) 2.1 硬件要求: (1) 2.2 Firmware要求: (1) 2.3 编程软件要求: (1) 第3章硬件连接与配置 (1) 3.1 硬件连接图 (1) 3.2 Lexium23的软件设置 (6) 3.3 PTO的软件设置 (6) 第4章功能实现 (13) 4.1 PTO对象 (13) 4.2 PTO指令说明 (16) 4.3 发送指令时应该考虑的规则 (16) 4.4 寻原点 (16) 4.5 设置位置 (18) 4.6 频率发生器 (18) 4.7 速度模式 (19) 4.8 相对值定位 (20) 4.9 绝对值定位 (22) 4.10 指令状态信息查询 (23) 第5章故障管理 (24) 5.1 LED面板 (24) 5.2 命令错误 (24) 5.3 可调整参数错误 (25) 5.4 轴错误 (25) 第6章编程过程中的注意事项 (26) 6.1 内存区的使用 (26) 6.2 输入滤波器的使用 (27) 6.3 ErrID的用法 (27) 第7章附录 (27) 7.1 图表 (27) 7.2 表格 (28)
第1章前言 Lexium 23 伺服驱动器配合BCH 伺服电机功率宽广、功能强大,能够满足多数工业场合的需求。 Lexium 23 C 伺服驱动器 200…255 V 单相,0.1 到1.5 kW 170…255 V 三相,0.1 到3 kW Lexium 23 M 伺服驱动器 170…255 V 三相,3 kW 到7.5 kW BCH 伺服电机 额定功率:0.1 到7.5KW 额定扭矩:0.3 到48 Nm 额定转速:1000 到3000rpm,取决于不同的型号 Lexium 23 伺服驱动器和BCH 伺服电机的完美组合可以适用于金属加工、物料搬运、纺织机械、电子设备、包装和印刷设备等多种场合。 TWDPTO220DT模块专用于Twido Brick40系列控制器的定位模块,该模块目前控制轴数量是3,该模块是个开环定位模块,不需要实时的移动位置反馈。 李成刚 第2章配置要求 2.1 硬件要求: Twido控制器:TWDLC**40DRF PTO模块:TWDPTO220DT-CN : 要求: 2.2 Firmware要求 BK40_V505及以上 软件要求: 编程软件要求 2.3 编程 TwidoSuite C V2.14.6 第3章硬件连接与配置 本章主要介绍了PTO与Lexium23的硬件连接,以及对PTO和Lexium23的软件配置。 3.1 硬件连接图 3.1.1 Twido PTO 结构
D型控制器 用户手册 控制器功能介绍 控制器安装及接线说明 控制器设置操作 附录1 通讯协议 施耐德万高(天津)电气设备有限公司Schneider Wingoal (Tianjin) Electric Equipment Co., Ltd
下面的符号将用于本手册的说明,提醒您注意潜在的危险,或者请您注意那些阐述、简化过程和关键操作。 !:安全警示标志,提示您如果违规操作可能造成人身安全危险或本开关的不可恢复性损坏。 : 关键性操作,提示您使用不当时,可能使控制器工作于非正常状态。 :提供另外的信息或简化的操作方法。 请注意: 电气设备应该让有资格的专业人员进行安装、操作、使用、维护。未按使用手册操作而造成的不良后果,施耐德电气公司将不负任何责任。 控制器功能介绍 本控制器工作电压为AC380V,工作频率为50Hz,主要功能是进行电压采集,根据电压的实时值进行故障判断(三相断相、欠压、过压和失压),并控制转换开关进行相应的转换动作。用户还可根据实际需要选配电流模块实现实时电流、有功功率和有功电能的显示。另外,控制器提供多组无源节点的输入和输出,包括故障输出、负荷卸载、发电机启动、动作无源输出、远程投备(无源输入)、消防联动(无源输入)以及通讯接口,具体接线参见第节。 控制器安装及接线说明 1.1.控制器外形尺寸
图1 D型控制器外形尺寸
1.2. 控制器二次接线 1.2.1. 控制器端子说明 1.2.2. A1-A3备A4-D2,A5-RJ,A6-OUT,A7-D3,A8-D1,A9-NJ,A10-12,主 A2A3A4A5A6A7A8A9A10 A11A12OUT B1B2B3B4B5B6B7B8B9B10B11B12 故障输出 负荷卸载 主转备备转主 发电机启动 C1C2C3C4C5C6C7C8C9C10 空 D3 NB RB 空 远程投备 消防联动 D1D2D3D4D5D6D7D8D9D10D11D12 A B A`B` G 空 IC*IB*IA*动作输出 RS485 IC IB IA 动作输出:当机构中电机转动时,常开触点闭合; 故障输出:当常用或备用电源故障时,常开触点闭合; 负荷卸载:在电网-发电机模式下,常用电源故障,常开触点闭合; 发电机启动:在电网-发电机模式下,常用电源正常,常开触点闭合,常用电源故障,常开触点打开; RS485:通信用端口,A’ B’为通信预留端口; IA~IC :电流互感器输入端口I*为输入端,I 为输出端;(输入额定电流5A ) 远程投备(无源):短接此两点,机构转到备用位置,开关状态主分备合;(可靠距离10m) 消防联动(无源):短接此两点,机构转到双分位置,开关状态主分备分;(可靠距离10m,WTS-D800~5000系列不具备该项功能) : 控制器的发电机启动端子在常用电源正常时常闭触点断开,当常用电源故障时常闭触点闭合以接通发电机启动电路;常开触点与之相反,请用户注意。 : 两台断路器的主回路相序必须一致。 : 非标产品使用,连接等应按照非标产品实际定制情况而定 ! 接地线必须可靠,以确保操作人员使用安全。 端子名称 额定电压 额定电流 动作及故障输出(无源) 250VAC/ 30VDC 5A 发电机启动及卸载端子(无 源)* 250VAC/ 30VDC 3A 此处指无源触点的额定负载电压及额定负载电流值
施耐德控制器操作 施耐德控制器(CD12,XD26系列) 一、设定画面停留时间操作如下: 3个画面停留时间设定 按A键进入画面: 10 motors Program T1: 00015 S T2: 00015 S T3: 00015 S 此时光标在T1:00015 S处闪动,如果需修改时间,请按O K键进入 此时T1:00015 S数字在跳动,如需调整,按+ 后,再按O K键确认光标闪动,此时已设定好T1时间。 如想调整T2时间按+T2:000 15 S处,其 它操作如T1设定,T3设定也一样。 待画面停留时间调整后按A键返回主模式 二、设定每天早上、晚上的开机时间和关机时间操作如下: 按ESC键进入模式: MACRO 000 FBD 062 TIME PROG WEEKLY 早上开机时间 n:00 07:00 ON D:MTWTFSS W:12345 此时光标在062处闪动,如果需修开机时间,按+键把光标移至07: 00处内动按O K键,此时07在跳动按+再按O K键确认光标在闪动,此时已设定好早上开机时间。 如想调整晚上关机时间操作如下: 在原来的早上开机时间下一直按+键至出现以下模式: MACRO 000 FBD 062 TIME PROG n:01 CHOSE EVENT 此时没有光标闪动按O K键进入模式: MACRO 000 FBO 062 TIME PROG WEEKLY n:01 23:00 OFF 关机时间 D:MTWTFSS W:12345 此时光标在n:01处闪动,操作方法与 开机时间设定操作一样。 待早上,晚上的开机时间和关机时间调整后按ESC键反回主模式注:施耐德控制器在控制面板中可调程序为以上两种,其他均不能调动
D 型控制器 用户手册 施耐德万高()电气设备 Schneider Wingoal (Tianjin) Electric Equipment Co., Ltd ● 控制器功能介绍 ● 控制器安装及接线说明 ● 控制器设置操作 ● 附录1 通讯协议
下面的符号将用于本手册的说明,提醒您注意潜在的危险,或者请您注意那些阐述、简化过程和关键操作。 :安全警示标志,提示您如果违规操作可能造成人身安全危险或本开关的不可恢复性损坏。 : 关键性操作,提示您使用不当时,可能使控制器工作于非正常状态。 :提供另外的信息或简化的操作方法。 请注意: 电气设备应该让有资格的专业人员进行安装、操作、使用、维护。未按使用手册操作而造成的不良后果,施耐德电气公司将不负任何责任。
控制器功能介绍 本控制器工作电压为AC380V,工作频率为50Hz,主要功能是进行电压采集,根据电压的实时值进行故障判断(三相断相、欠压、过压和失压),并控制转换开关进行相应的转换动作。用户还可根据实际需要选配电流模块实现实时电流、有功功率和有功电能的显示。另外,控制器提供多组无源节点的输入和输出,包括故障输出、负荷卸载、发电机启动、动作无源输出、远程投备(无源输入)、消防联动(无源输入)以及通讯接口,具体接线参见第2.2节。 控制器安装及接线说明 1.1.控制器外形尺寸 图1 D型控制器外形尺寸
1.2. 控制器二次接线 1.2.1. 控制器端子说明 1.2.2. A1-A3备A4-D2,A5-RJ,A6-OUT,A7-D3,A8-D1,A9-NJ,A10-12,主 A2A3A4A5A6A7A8A9A10 A11A12OUT B1B2B3B4B5B6B7B8B9B10B11B12 故障输出 负荷卸载 主转备备转主 发电机启动 C1C2C3C4C5C6C7C8C9C10 空 D3 NB RB 空 远程投备 消防联动 D1D2D3D4D5D6D7D8D9D10D11D12 A B A`B` G 空 IC*IB*IA*动作输出 RS485 IC IB IA ? 动作输出:当机构中电机转动时,常开触点闭合; ? 故障输出:当常用或备用电源故障时,常开触点闭合; ? 负荷卸载:在电网-发电机模式下,常用电源故障,常开触点闭合; ? 发电机启动:在电网-发电机模式下,常用电源正常,常开触点闭合,常用电源故障,常开触点打开; ? RS485:通信用端口,A’ B’为通信预留端口; ? IA~IC :电流互感器输入端口I*为输入端,I 为输出端;(输入额定电流5A ) ? 远程投备(无源):短接此两点,机构转到备用位置,开关状态主分备合;(可靠距离10m) ? 消防联动(无源):短接此两点,机构转到双分位置,开关状态主分备分;(可靠距离 10m,WTS-D800~5000系列不具备该项功能) : 控制器的发电机启动端子在常用电源正常时常闭触点断开,当常用电源故障时常闭触点闭合以接通发电机启动电路;常开触点与之相反,请用户注意。
LXM23DU施耐德伺服控制器调试软件使用方法 第一步:完成现场设备接线,如下图1所示 图1 如图2所 示,在调试时 只需要接电机 主回路电源、 编码器接口 CN2、PC调试 接口CN3。 图2
注意: 1、伺服控制器进线端电源接AC220V,采用两线制接法(R/S/T三项 任选两项,L1、L2并接在其两项上) 2、伺服控制器上CN3接口是RJ45接口,为实现在PC机上完成参 数调试,需订购USB转232串口线,自己制作RS232转RJ45接头,制作方法如下图3: 图3
第二步:安装USB转232驱动和调试软件 图4 第三步:参数调试(参数调试时,一定要把Serve on打掉) 1、设备接线完成后,给控制器上电,然后打开调试软件。 图5 2、进入调试软件后,点击图标,连接调试软件和伺服控制器。如果连接成功,会显示对接状态。
图6 3、然后点击--参数初始化精灵--图标,进入页面编辑: ① 选择—Pr:位置控制模式(内部任务) ② 设定DI输入定义,共8个DI口:伺服启动、异常重置、 复归原点、回归原点启动、命令触发、内部存储位置命令 0~2(3个点)。其中a接点代表常开点(选择常开)、b接点代表 常闭点。 3 1 2
参数配置完毕,点击图标,把参数载入控制器。 4、点击进入Pr—mode—编辑,编辑相关参数,调试时复归方式X: 4,实际测试时复归方式X:7。可以修改复归原点的速度:P5-05、P5-06,修改完成后一定要下载。 注:在修改完参数下载的过程中,如果参数没有下载进去,会 有*提示错误,例如: 此时,就要对修改参数进行重新下载。 5、伺服控制调试共有5种位置:000 001 010 011 100
BA/UA BA/UA controller Compact NS100-630 Masterpact MT Merlin Gerin Installation manual
This equipment should only be mounted by professionals.The manufacturer shall not be held responsible for any failure to comply with the instructions given in this manual RISK OF ELECTROCUTION,BURNS OR EXPLOSION the device should only be installed and serviced by professionals switch off the general power supply to the device prior to any work on or in the device always use an appropriate voltage detection device to confirm the absence of voltage replace all interlocks,doors and covers before energising the device. Failure to take these precautions could expose intervener and people round to serious corporal injuries which could cause death.
选型指南 应用 模块 功能 可实现的最高安全等级 遵守的标准 产品认证 电路数量 显示屏 输入电压 安全通道数 辅助通道数 安全解决方案 Preventa 安全控制器 同时监控2个独立安全功能的控制器。 用户从15个组态中选择2个功能,从控制器正面可编程。 p 急停监控 p 开关监控 p 使能开关监控 p 感应地毯或边缘监控 p 光幕监控,继电器输出类型 p 等等 EN ISO 13849-1标准的PL e/4类, EN/IEC 61508和EN/IEC 62061标准的SILCL 3 EN/IEC 60204-1, EN/IEC 60947-1, EN/IEC 60947-5-1 UL, CSA, TüV 6 NO (3 NO/功能) 向PLC 发送信号的3个固态输出 12个LED c 24 V 通讯 CANopen 总线 – 模块型号 页码 16 Pro bus 总线 Modbus 总线 – – XPS MP 38784/2
可以使用软件组态的控制器,用于多个独立的安全功能:使用在Windows 上运行的组态软件选择安全功能(16或32个输入和8个独立安全输出) p 急停监控 p 限位开关监控 p 双手控制监控 p 安全光幕监控,带/不带“静音”功能 p 使能开关监控,编码磁开关监控 p 安全地毯监控 p 液压机电磁阀监控 p 偏心压机的上死点的安全停止器监控。零转速检测 p 液压机监控 p 偏心压机监控 p 脚踏开关监控 p 链轴断裂监控 p 安全工具 p 位置选择器 EN ISO 13849-1标准的PL e/4类, EN/IEC 61508和EN/IEC 62061标准的SILCL 3 EN/IEC 60204-1, EN 1760-1/ISO 13856-1, EN/IEC 61496-1, EN 574/ISO 13851, EN/IEC 60947-1, EN/IEC 60947-5-1 UL, CSA, TüV 4 NO (2 NO/功能)+ 6固态 1个“静音”信号输出 正面LED 显示屏 c 24 V 通过SUB-D 9芯针型连接器,仅用于XPS MC16ZC 和XPS MC32ZC 通过SUB-D 9芯孔型连接器,仅用于XPS MC16ZP 和XPS MC32ZP 通过RJ45连接器,用于所有控制器XPS MCppZp XPS MC 38789/2 17
施耐德a t s D型控制器 用户手册 WEIHUA system office room 【WEIHUA 16H-WEIHUA WEIHUA8Q8-
D 型控制器 用户手册 施耐德万高(天津)电气设备有限公司 ● ● ● ●
Schneider Wingoal (Tianjin) Electric Equipment Co., Ltd 下面的符号将用于本手册的说明,提醒您注意潜在的危险,或者请您注意那些阐述、简化过程和关键操作。 身安全危险或本开关的不可恢复性损坏。 : 关键性操作,提示您使用不当时,可能使控制器工作于非正常状态。 :提供另外的信息或简化的操作方法。 请注意: 电气设备应该让有资格的专业人员进行安装、操作、使用、维护。未按使用手册操作而造成的不良后果,施耐德电气公司将不负任何责任。
控制器功能介绍 本控制器工作电压为AC380V,工作频率为50Hz,主要功能是进行电压采集,根据电压的实时值进行故障判断(三相断相、欠压、过压和失压),并控制转换开关进行相应的转换动作。用户还可根据实际需要选配电流模块实现实时电流、有功功率和有功电能的显示。另外,控制器提供多组无源节点的输入和输出,包括故障输出、负荷卸载、发电机启动、动作无源输出、远程投备(无源输入)、消防联动(无源输入)以及通讯接口,具体接线参见第节。 控制器安装及接线说明 1.1.控制器外形尺寸 图1 D型控制器外形尺寸
1.2. 控制器二次接线 1.2.1. 控制器端子说明 1.2.2. A1-A3备A4-D2,A5-RJ,A6-OUT,A7-D3,A8-D1,A9-NJ,A10-12,主 A2A3A4A5A6A7A8A9A10 A11A12OUT B1B2B3B4B5B6B7B8B9B10B11B12 故障输出 负荷卸载 主转备备转主 发电机启动 C1C2C3C4C5C6C7C8C9C10 空 D3 NB RB 空 远程投备 消防联动 D1D2D3D4D5D6D7D8D9D10D11D12 A B A`B` G 空 IC*IB*IA*动作输出 RS485 IC IB IA ? 动作输出:当机构中电机转动时,常开触点闭合; ? 故障输出:当常用或备用电源故障时,常开触点闭合; ? 负荷卸载:在电网-发电机模式下,常用电源故障,常开触点闭合; ? 发电机启动:在电网-发电机模式下,常用电源正常,常开触点闭合,常用电源故障,常开触点打开; ? RS485:通信用端口,A’ B’为通信预留端口; ? IA~IC :电流互感器输入端口I*为输入端,I 为输出端;(输入额定电流5A ) ? 远程投备(无源):短接此两点,机构转到备用位置,开关状态主分备合;(可靠 距离10m) ? 消防联动(无源):短接此两点,机构转到双分位置,开关状态主分备分;(可靠 距离10m,WTS-D800~5000系列不具备该项功能) : 控制器的发电机启动端子在常用电源正常时常闭触点断开,当常用电源故障时常闭触点闭合以接通发电机启动电路;常开触点与之相反,请用户注意。 : 两台断路器的主回路相序必须一致。 : 非标产品使用,连接等应按照非标产品实际定制情况而定 接地线必须可靠,以确保操作人员使用安全。 附:无源输出端子电气参数:
施耐德ATV71变频器调试指南 第一部分接线 一.电气控制图: 1.主回路 2.控制回路 3.编码器
二.端子位置图: 1.功率端子分布: ATV71-HD95N4 ATV71-HD95N4(输入电抗器) ATV71-HD45N4/ ATV71-HD55N4 ATV71-HU75N4 2.控制端子位置图: 3.编码器卡安装图
三.接线注意事项: 1.各功率端子和控制端子一定要安装紧固; 1.1 动力直流母线端子PO--PA+之间的短接铜片一定要保持紧固; 1.2 控制端子的PWR--+24V之间的短接片一定要保持连接,否则变频器将显示状态PRA并且不能正常输出。 1.3 如用AI1+和AI1-做双极性给定,请去掉AI1-和com之间的短接片。 2.请可靠连接各保护地和屏蔽地。
第二部分用中文图形终端编程 一.中文图形编程操作终端界面 二.菜单结构 1.主菜单 注:所有的参数调整都在1 变频器菜单中进行,其它的主菜单都是辅助功能。这些需要在使用中灵活掌握,慢慢积累经验。 2.变频器菜单
注:变频器菜单中有关调试主要菜单是1.1 到 1.8 。我们暂时也仅仅涉及一些主要的菜单和参数。其它都是辅助菜单,这些需要在使用中灵活掌握,慢慢积累经验。 三.调试的步骤 第一步,设置简捷的起停控制 设置端子与面板切换功能键(命令菜单): 在命令菜单,找到最后一个参数: F4键分配:设置其功能为T/K,即为端子控制(Terminals)与图形终端控制(Kepad)切换。 这样按F4键可以切换用端子控制起停或图形终端控制起停。端子控制有效时,起停命令来自LI1, LI2的逻辑端子的输入,这时变频器图形终端首行显示的第二个位置显示TERM;图形终端控制激活时,按图形终端上的RUN, STOP,FWD/REV键可以控制变频器的正反转,旋转导航键(浏览鼓轮)改变频率给定这时图形终端首行显示的第二个位置显示HMI。此设置的目的是为了便于手动试运转。 正常运行时,应采用端子控制。(常熟工厂为设置)。 第二步,设置电机的闭环磁通矢量控制方式 1.电机铭牌参数的输入与参数优化(1.4 电机控制菜单) : 在1.4 电机控制菜单中,我们需要输入以下电机铭牌参数,目的是为了让变频器识别电机的电气指标,以便实现最优控制。电机参数的不当输入会引起输出的不稳定,导致电机的剧烈振动,额外发热及变频器等的损坏。 电机额定功率:电机铭牌上标定的规定接法,额定频率下的额定功率(如11KW, 4KW); 电机额定电压:电机铭牌上标定的规定接法,额定频率对应的额定电压(如380V); 电机额定电流:电机铭牌上标定的规定接法下的额定电流(如23.5A, 8.8A); 电机额定频率:电机铭牌上标定的规定接法,额定电压对应的额定频率(如50Hz); 电机额定速度:电机铭牌上标定的对应于额定频率下的额定转速(如1450rpm等); 最大输出频率:应用中可能运行的最高输出频率(如100 Hz, 65Hz)。注意此值决定其它菜单中的频率上限。 上述参数设定后,变频器将能够正确识别和控制电机。为了实现最佳控制,建议执行电机参数自整定。
主要信息 范围Lexium Controller 产品或组件类型运动伺服驱动控制器 组件名称LMC 极化方式10 kOhm 用于 Modbus 协议 补充信息 Us 额定电源电压24 V 电源电路类型直流 电源电压限制19...30 V 源电流0.3 A 瞬间峰值电流<= 10 A 用于 0.2 ms 离散量输入数量8 discrete 2 touch probe 2 event-triggered 1 master encoder 离散量输入类型7 mA 触摸探头输入用于 3 kOhm 7 mA 事件触发输入用于 3 kOhm 7 mA 离散量输入用于 3 kOhm 12 mA 主编码器输入用于 2 kOhm 离散量输入电压24 V 直流 (19...30 V) 触摸探头输入 24 V 直流 (19...30 V) 事件触发输入 24 V 直流 (19...30 V) 离散量输入 5.5 V 直流主编码器输入 离散量输入逻辑正逻辑(源) 用于离散量输入 电气连接1个高密度15针孔型SUB-D连接器主编码器输 入 1个HE-10连接器触摸探头输入 1个HE-10连接器事件触发输入 1个HE-10连接器离散量输入 滤波器时间70 μs 在 0 状态用于事件触发输入 70 μs 在 0 状态用于 Discrete 输入 15 μs 在 1 状态用于事件触发输入 15 μs 在 1 状态用于 Discrete 输入 1 μs 在 1 状态用于触摸探头输入 0.5 μs 在 0 状态用于触摸探头输入 隔离触摸探头输入用于采用光电耦合的带内部逻辑输 入通道之间 主编码器输入 for 2500 V 逻辑输出用于采用光电耦合的带内部逻辑输出通 道之间 事件触发输入用于采用光电耦合的带内部逻辑输 入通道之间 离散量输入用于采用光电耦合的带内部逻辑输入
《运动控制系统安装调试与运行》 课程整体设计介绍 目录 第一部分:课程建设概况 一、课程建设概述 二、课程性质 三、课程设计理念 四、课程建设的特色与创新 第二部分:课程体系设计 一、主要就业岗位与典型工作任务 二、学习领域课程 三、主干学习领域 第三部分:课程整体设计思路 一、教学内容的针对性与适用性 二、课程整体设计思路 三、理实一体化教学设计 四、课程学习情境设计思路 五、课程教学设备及教学环境好设计思路 六、教学内容的组织与安排 七、教学模式的设计与创新 八、教学方法的应用 九、校内实训设备与实训环境 十、校外实习基地的建设与使用
《运动控制系统安装调试与运行》课程整体设计各位专家好! 我代表《运动控制系统安装调试与运行》课程建设团队向各位专家汇报课程建设的整体设计情况。 第一部分:课程建设概况 一、 课程建设概述 本课程是在2008年度江苏省精品课程《交流调速系统及应用》的基础上, 对部分教学内容进行进一步充实并按照基于工作过程系统化的课程开发理念开发的一门电气自动化技术专业学习领域课程。 近几年教学团队主要教科研成果有: 1.《交流调速系统及应用》课程建设获2008年度江苏省精品课程 2.指导第一届全国高职院校学生技能大赛自动线安装与调试项目获全国二等奖(2008。6) 3.“柔性自动化综合实训设备”的研制获第一届全国高校自制仪器设备成果评选及展览“优秀成果奖”(2008.10) 4.指导毕业设计《基于PPI通信的自动化仿真生产线的设计与实现》获江苏省普通高校本专科优秀毕业设计评选一等奖(2009.4) 5.教学团队先后申获各类专利12项,其中教学设备研制的发明专利两项 二、 课程性质 《运动控制系统安装调试与运行》课程是电气自动化技术专业的一门专业核心课程,是在对专业职业工作岗位进行整体调研与分析的基础上,采用基于工作过程系统化的课程开发理论,校企合作开发的一门校内学习与实际工作相一致、理实一体的学习领域课程。 三、 课程设计理念 1.本课程是以学生活动为中心设计的、工作过程系统化、情境化的学习领域课程,设计理念上强调以工作过程为参照系,按照工作过程对课程内容进行序化。即:将陈述性知识与过程性知识整合、理论知识学习与实践技能训练整合、专业能力培养与职业素质培养整合、工作过程与学生认知心理过程整合,通过科学的教学设计,将学习领域细化成具体的学习情境。在学习过程中,学生首先通
第六章. 运动控制 6.1 运动控制地定义 6.2 运动控制地组成 6.2.1 同步伺服电机 6.2.2 步进电机 6.2.3 驱动器 6.2.4 控制器 6.3 运动控制系统地结构 6.4 运动控制要解决地问题 6.5 伺服电机地选型计算 6.6 典型应用 6.1 运动控制地定义 运动控制是指动作地单元以非常精确地设定速度在规定时间到达准确位置地可控运动. 运动单元地运动有如下特点: 路径: 有一个初始位置
有一个终点位置 稳定地速度和上升,下降斜率 动作: 静态和动态响应非常精确 运动响应很快 运动很稳定 位置: 有绝对位置 有相对位置 根据不同地应用工艺, 我们把运动分为有限轴运动和无限轴运动. 有限轴运动是指运动体地运动在一定范围内, 如机械手地运动在设计范围内抓取工件. 无限轴运动是指运动体连续不断地向一个方向运动,没有边界. 如传送带地运动. 6.2 运动控制地组成 运动控制地组成离不开以下4个单元,如图: 运动控制器: 控制运动按照设定地轨迹动作,不断计算位置和速度地匹配 驱动器: 把普通电能转化为向电机提供运动地动力 电机: 产生对负载推动地扭矩 位置传感器: 提供电机轴实时地位置和速度 所以, 运动控制要完成可控地动作, 主要对3个变量进行控制. 即: 电机地力矩, 速度, 位置 如图所示
6.2.1 同步伺服电机 首先让我们看一下运动控制中地执行器: 伺服电机 电机是把电枢电流转化为电机轴输出力矩地一种装置. 从技术角度, 我们通常把电机分为异步电机, 同步电机和步进电机. 从运动形式来分,可分为旋转电机和直线电机. 如图所示: 在运动控制系统中,用到地电机通常为同步无刷电机. 6.2.1.2 无刷伺服电机地工作原理: 集成有位置编码器地电机(位置测量),其转子是永久磁铁, 定子是与异步电机一样地线圈绕组.
D 型控制器 用户手册 施耐德万高(天津)电气设备有限公司 Schneider Wingoal (Tianjin) Electric Equipment Co., Ltd 控制器功能介绍 ................................................................ 控制器安装及接线说明 .....................................................1.1. 控制器外形尺寸 ..........................1.2. 控制器二次接线 ..........................
尊敬的客户: 谢谢您使用本公司生产自动转换开关电器(以下简称开关),为了您的安全和正确使用本产品,敬请您在安装、电路连接、运行、维护检查前,熟读本手册。本手册仅适用于带D型控制器的开关 下面的符号将用于本手册的说明,提醒您注意潜在的危险,或者请您注意那些阐述、简化过程和关键操作。 !:安全警示标志,提示您如果违规操作可能造成人身安全危险或本开关的不可恢复性损坏。 : 关键性操作,提示您使用不当时,可能使控制器工作于非正常状态。 :提供另外的信息或简化的操作方法。 请注意: 电气设备应该让有资格的专业人员进行安装、操作、使用、维护。未按使用手册操作而造成的不良后果,施耐德电气公司将不负任何责任。
控制器功能介绍 本控制器工作电压为AC380V,工作频率为50Hz,主要功能是进行电压采集,根据电压的实时值进行故障判断(三相断相、欠压、过压和失压),并控制转换开关进行相应的转换动作。用户还可根据实际需要选配电流模块实现实时电流、有功功率和有功电能的显示。另外,控制器提供多组无源节点的输入和输出,包括故障输出、负荷卸载、发电机启动、动作无源输出、远程投备(无源输入)、消防联动(无源输入)以及通讯接口,具体接线参见第节。 控制器安装及接线说明 1.1.控制器外形尺寸 图1 D型控制器外形尺寸