C++总复习题目(带填空答案)
- 格式:doc
- 大小:88.50 KB
- 文档页数:10
2021届浙江中考英语总复习完形填空阅读理解组合训练二十一、完形填空①It was one of the hottest days of the dry season. We had not seen 1 in almost a month. The crops were dying. Cows had stopped giving 2 . If we didn’t see some rain soon we would lose everything.I was cooking in the 3 when I saw my six-year-old son, Billy, walking toward the4 .He was obviously walking with great5 . Minutes after he disappeared into the woods, he came running out again, toward the house.Moments later, however, he was once again walking toward the woods. He kept the 6 for over an hour walking 7 to the woods, then running back to the house. Finally, I was so 8 that I went out of the house and 9 him on his journey.He was cupping both 10 in front of him as he walked; being very careful not to spill the water he held in them. Branches and thorns (荆棘) slapped his little face but he did not try to 11 them. As I came close to him, I saw the most amazing scene.Several large 12 appeared threatening ( 威胁)in front of him. But Billy walked right up to them. I almost 13 for him to get away. And I saw a baby deer lying on the ground, obviously suffering(遭难)from heavy loss of water, 14 its head to drink the water cupped in my beautiful boy’s hands.I stood on the edge of the woods watching the most beautiful 15 working so hard to save a life. As my tears began to hit the ground, they were suddenly joined by other drops... and more drops... and more.1. A. wind B. snow C. rain D. cloud2. A. food B. drink C. water D. milk3. A. living room B. kitchen C. bedroom D. study4. A. woods B. river C. lake D. house5. A. sadness B. success C. effort D. confidence6. A. behaviour B. activity C. mood D. feeling7. A. quickly B. hurriedly C. carelessly D. carefully8.A. angry B. sad C. curious D. calm9. A. waited for B. looked for C. followed D. hit10.A. hands B. arms C. legs D. feet11.A. face B. cut C. prevent D. avoid12.A. horses B. cows C. deer D. sheep13.A. screamed B. rushed C. made D. laughed14.A. shake B. lift C. put D. hit15.A. heart B. head C. hair D. face完形填空①( )1. A. cold B. wet C. excited D. afraid ( )2. A. risk B. fear C. care D. worry( )3.A. And B. Because C. But D. So( )4.A. For example B. Such as C. Never mind D. All right( )5.A. with B. on C. into D. by( )6.A. food B. map C. fruit D. ticket( )7.A. His B. My C. Her D. Their( )8.A. dead B. rich C. poor D. ugly( )9.A. have lived B. lived C. are living D. were living( )10.A. words B. bag C. money D. stone( )11.A. carefully B. slowly C. successfully D. noisily( )12. A. is fond of B. gets along with C. is afraid of D. is sure about( )13. A. who B. which C. where D. whom( )14. A. worried B. sad C. happy D. energetic( )15. A. why B. how C. when D. where二、阅读理解AAndy rode slowly on his way to school, day-dreaming about the fishing trip that his father had promised him. He was so busy dreaming about all the fish he would catch that he was unaware of everything else around him.He rode along until a strange sound drew him to the present. He came to a stop and looked curiously up to the heavens. What he saw him. A huge swarm of bees filled the sky like clack cloud and the buzzing mass towards him. With no time to waste. Andy sped off in the opposite direction, riding without knowing how to escape the swarm a rapidly beating heart and his legs pumping furiously down the rough road. As the bees came closer, his panic increased. Andy knew that he was sensitive to bee stings(蜇). The last sting had landed him in hospital-and that was only one bee sting! He had been forced to stay in bead for two whole days. Suddenly, his father's words came to him. “When you are in a tight situation, don't panic. Use your brain and think your ways out of it.”On a nearby hill, he could see smoke waving slowly skywards form the chimney of the Nelson family home. “Bees don't like smoke,”he thou ght. “They couldn't get into the house. ”Andy raced towards the Nelson house, but the bees were gaining ground. Andy knew be could not reach the house in time. He estimated that the bees would catch up with him soon.Suddenly, out of the corner of his eyes, he spotted a small dam used by Mr. Nelson to water his vegetable garden. Off his bike and into the cool water he dived, disappearing below the surface and away from the savage insects. After holding his breath for as long as he could, Andy came up for air and noticed the bees has gone. Dragging himself out of the dang the struggled up the hilly slope and rang the doorbell. Mr. Nelson took him inside and called his mother.1.Andy didn’t notice the bees because _________.A. he was calling his motherB. he was listening to a strange soundC. he was fishing with his fatherD. he was lost in the thought of the trip2.According to the passage, the bee stings would_______A. make Andy go into the hospitalB. help Andy remember his fatherC. improve his riding skillsD. happen near Nelson family home3.The underlined word“panic" in the Paragraph 3 means _______A. give adviceB. run awayC. feel frightenedD. give up4.___________can best describe Andy’s escape(逃脱) from the bees?A."No pains, no gains."B.''Once bitten, twice afraid.''C.''Where there is a will, there is a way.''D.''In time of danger, one’s mind works fast.''BThis painting is called The Fighting Temeraire. Temeraire is the name of the big, old sailing ship that you can see on the left of the picture. People chose this picture to be the greatest painting in Britain.J.M.W. Turner painted it in 1839.It shows the old sailing ship, the Temeraire, on the River Thames near London. There's a small tugboat pulling the old ship. It's in fact taking the Temeraire on its last journey. The old ship is going to the breaker's yard. In the background we can see the sun setting.The picture, however, is more than just a painting of two boats in the evening. The artist wanted to show the end of an era (时代). The time of the beautiful, old sailing ships is coming to an end. That's why we see this happening at sunset. In the little, brown tugboat we can see the new industrial era starting. The tugboat is small and dark and it's making a lot of smoke, but it's very strong, because it's pulling the much bigger ship.The painting shows a real event. Turner watched the Temeraire taking its last journey up the Thames, but he changed some of the details. He painted the old ship white and gold so that it looks like a ghost. In fact, the real ship was black and yellow. We also see the sun setting behind the ship, but in fact, the ship travelled towards the sunset. However, Turner wanted to show the sun setting on the time of the beautiful old sailing ships.Turner painted The Fighting Temeraire when he was quite old, so perhaps he wanted to show the sun setting on his own life, too. He loved the painting and he never sold it. You can see it today in the National Gallery in London.1.The Fighting Temeraire ________.A .is the name of a big sailing shipB .was thought the best painting in BritainC .shows two nice new shipsD .was painted by a famous young artist2.The old ship was pulled to the yard ________.A .to be painted newB .to be repairedC .to be broken upD .to be sold3.What does the tugboat stand for according to the passage?A .The new industrial era.B .The beautiful old era.C .The painter's own life.D .The white and gold ghost.4.What can we learn from the last two paragraphs?A .The color of the real sailing ship was white and gold.B .In the painting the sailing ship was going towards the sunset.C .Finally Turner sold this painting because he didn't like it.D .Today the painting is kept in the National Gallery in London.CThere are so many single-use products, such as paper cups, plastic bags and old newspaper which we throw away after using only once.①According to news website Quartz, we are now living in a "throw-away society". Single-use has become a natural way of life and can be seen almost everywhere.①Every day, we see new memes(表情包), stories and Internet slang(网络俚语) on social media With so many of them coming out all the time, the lifespan of each becomes short-they become "single-use online products " This also means social media users are always searching for the next big thing.①You may feel upset when trying to keep up with these memes and slang, but you just cannot help but keep scrolling(滚屏). It is endless-no matter it's WeChat Moments, Sina Weibo or Facebook.①while you read single use content online. you also produce it. Since 2017, WeChat Moments has allowed users to make only the last three days of their posts viewable. As a result, more and more people don’t take their posts seriously.Since it doesn’t take too much time and energy to communicate anymore, we now even have single-use friendships, according to a story in Fast Company.A single-use way of life may give you quick pleasure. But the pleasure may not last for long because there is no deep thought behind it. Maybe we need to slow down and enjoy a more thoughtful way of life.1. Where can we best put “But the idea of single-use is about more than just plastic and paper”?A.①B.①C.①D.①2. Why does the writer mention “We Chat Moments three days viewable” in Paragraph 5?A. To show that WeChat take all the users' privacy(隐私)seriously.B. To explain the reason why the lifespan of memes and slang becomes short.C To prove that we are producing single-use things when we read them online.D. To teach WeChat users how to post something meaningful on their Moments.3. What is the writer’s opinion of single-use way of life?A. As long as single-use way of life gives us pleasure, we should enjoy it.B. Single-use life will be helpful to our relationship with others.C Single-use life is a natural way of life and we should get used to it.D. We need to think twice and lead a more thoughtful way of life4. The writer would probably talk about________ if he continues to write this passage.A. the disadvantages of single-use way of lifeB the reasons that cause single-use way of lifeC the ways to avoid single-use way of lifeD. different opinions about single-use way of life.三、词汇综合运用在短文的空格内填入适当的词,使其内容通顺.每空格限填一词,首字母已给出It’s a Wonderful Life《生活多美好》is an American Christmas drama film. It was produced and directed by Frank Capra. It was b 1on the short story The Greatest Gift. The short story was written by Philip Van Doren Stern. The movie c 2 out in 1946.The famous actor, James Stewart, played the r 3 of George Bailey in the movie. George is not a successful man and he isn’t p 4 with his life. He feels hopeless and wants to kill himself o 5 Christmas Eve. His guardian angel (守护天使), Clarence Odbody (played by Henry Travers), c omes to save him. Clarence shows George some facts he hasn’t found out. George r 6 that he can bring good luck and happiness to others. He finds out the v 7 of his life. F 8 , he gives up the idea of killing himself. He hopes for a better life.It’s a Wonderful Life was nominated for five Oscars without winning any of them, h 9 ,it was still a popular film. The American Film Institute once placed it number one on its list of the most encouraging American films of all time. It is a successful movie without d 10 .四、参考答案完型①CDBAC BDCCA DCABA完型①ABCAD DBBCC ACABA阅读理解DACD BCAD ACDC词汇运用based came role pleased on realizes .value Finally however doubt。
《计算机系统结构》期末考试复习题一、选择题:1、我们称由(B )实现的机器为虚拟机器。
A、硬件B、软件C、微程序D、固件2、计算机系统结构设计者所关心的是(C )所看到的的计算机结构。
A、硬件设计人员B、逻辑设计人员C、机器语言或汇编语言程序员D、高级语言程序员3、计算机组成是计算机系统结构的(B )。
A、硬件实现B、逻辑实现C、软件实现D、以上三种4、在计算机系统设计时,为了提高系统性能,应当注意(A )。
A、加快经常性使用指令的执行速度B、要特别精心设计少量功能强大的指令B、要减少在数量上占很小比例的指令的条数D、要加快少量指令的速度5、SIMD计算机可以处理(D )。
A、多指令流、单数据流B、单指令流单数据流C、多指令流多数据流D、单指令流多数据流6、在提高CPU性能的问题上,从系统结构角度,可以(C )。
A、提高时钟频率B、减少程序指令条数C、减少每条指令的时钟周期数D、减少程序指令条数和减少每条指令的时钟周期数7、冯.诺依曼计算机是(B )。
A、以存储器为中心B、以CPU为中心C、以处理输入/输出危重点D、以存储器与计算器为中心8、解决软件移植最好的办法就是(C )。
A、采用模拟方法B、采用仿真的方法C、采用统一高级语言D、采用统一标准设计计算机结构9、对计算机系统结构,下列透明的是(A )。
A、数据总线宽度B、浮点数表示C、CPU寄存器个数D、存储器的编址方法10、以下对系统程序员不透明的是(B )。
A、系列机各档不同的数据通路宽度B、虚拟存储器C、指令缓冲寄存器D、存储器读写缓冲寄存器11、在浮点数表示中,尾数的位数多少主要影响( B )。
A、表数范围B、表数精度C、表数效率D、运算实现容易程度12、当浮点数的尾数基值为(A )时,其表数效率最高(假如不考虑隐藏位)。
A、16B、8C、4D、213、当浮点数的尾数基值为( D )时,其表数精度最高,表数范围最大。
A、2B、8C、16D、2或414、当浮点数的尾数用原码表示,基值为2,阶码用移码表示,基值为2时,若尾数部分占23位(不含符号位),阶码占8位(含符号位),则表示的最大负数和最大正数分别为( C )。
一、判断题。
1、#include 、#define、scanf和printf都不是C语句。
(对)//#号开头的,是C语言的命令,最后不加分号“;”。
scanf和printf是输入和输出函数,不是C 语言的语句-----C语言里没有输入和输出语句,是由函数(如:这里的scanf 和printf函数)来实现输入和输出的。
2、一个include命令只可以指定一个被包含的文件。
(对)//include命令一次只可以指定一个包含的文件,要包含多个文件要用多个include命令3、参加位运算的数据必须是整型的数据。
(对)//如:不能使float类型的数据4、若有int i=9, j=3; 则执行完i*=j+10; 后i的值为20。
(错)//i*=j+10=>i=i*(j+10)=9*(3+10)=9*135、9&3+11的值是12。
(错)// 9&3+11=9&(3+11)=>1001&1110=1000=>86、关系运算符>=与==的优先级相同。
(错)//关系运算符的前4个(>、>=、<、<=)的优先级相同。
后两个(==、!=)的优先级相同,并且低于前4个的优先级。
7、若i=5,则printf(“%d”,-i++);输出的值为-6。
(错)//++在后面是先将-i打印,再将i加1。
如果是printf(“%d”,- ++i);则输出的值就为-6.8、语句printf(“%f%%”,10.0/3);输出为3.333333。
(错)//10.0/3确实是3.333333,但是这里还有%%,所以输出的结果应该是3.333333%9、若有int i=20, j=0;则执行完语句if(j=0)i++;else i--;i的值为21。
(错)//注意这里是j=0,一个等号是赋值,也就是j=0,这里是假,所以应该执行else i—部分,i的值为19.10、若有定义和语句:int a[3][3]={{3,5},{8,9},{12,35}}, i, sum=0;for(i=0;i<3;i++) sum+=a[i][2-i];则sum=21。
总复习题一、填空题(每题2分,共20分)1、十六进制数3D7转换成二进制数是_1111010111_______。
2、将原码表示的有符号二进制数11001101转换成十进制数是__-77______。
(有符号的二进制数最高位一般是表示数的正负,0表示正数,1表示负数,有符号的二进制数11001101,第一位1是负数符号,1001101转成十进制为77。
)3、8位无符号二进制数能表示的最大十进制数是_255_。
4、按照目前最流行的方法,常见的计算机病毒分为:__目录型、文件型、宏病毒型_等几种(写出三种即可)。
5、有多个打开的窗口时,只有一个是___活动窗口______6、若从资源管理器中拖出一个文件放到回收站图标上.将_"确认文件删除"对话框___。
7、Windows 是最流行的操作系统。
8、Web运行模式是客户程序/服务器模式,其中,客户程序指的是__ Web游览器_____,服务器对应的是__网站_____。
9、计算机联网的主要目的是__通信__和__资源共享__。
10、计算机网络若按地理位置分类,可分为__局域网、广域网、和城域网。
因特网是一种__广域网__网。
二、单项选择题(每题2分,共46分)1、计算机的内存主要有RAM组成,其中存储的数据在断电后____丢失。
A、不会B、部分C、完全D、不一定2、一个完整的计算机系统应包括____。
A、硬件系统和软件系统B、主机和外部设备C、运算器、控制器和存储器D、主机和实用程序3、计算机硬件五大部件是指____。
A、RAM、运算器、磁盘驱动器、键盘、I/O接口B、ROM、控制器、打印机、显示器、键盘C、存储器、鼠标器、显示器、键盘、微处理器D、运算器、控制器、存储器、输入设备、输出设备4、计算机系统中的CPU是指____。
A、内存储器和运算器B、控制器和运算器C、输入设备和输出设备D、内存储器和控制器5、计算机中的运算器能进行____。
初三数学总复习:填空题精选150题(附参考答案) 一、概念理解应用类1.-8的绝对值是________.2.若∠α=35°,则∠α的补角为 度. 3.若分式53x -有意义,则实数x 的取值范围是___. 4.若分式13x x -+有意义,则x 的取值范围是 . 5.二次根式中,x 的取值范围是 .6.若在实数范围内有意义,则x 的取值范围是 .7.在函数y =中,自变量x 的取值范围是 . 8.函数y =中自变量x 的取值范围是 . 9.函数y =的自变量x 的取值范围是 .10.若二次根式在实数范围内有意义,则x 的取值范围是 .11.函数y =1-x x中,自变量x 的取值范围是 . 12.若29x y -+与3x y --互为相反数,则x +y 的值为_________.13.已知点P (﹣2,1),则点P 关于x 轴对称的点的坐标是 .14.地球与月球的平均距离大约384000km ,用科学计数法表示这个距离为 km . 15.长城是我国第一批成功入选世界文化遗产的古迹之一,它的总长经过“四舍五入”精确到十万位的近似数约为6700000米,将6700000用科学记数法表示为 .16.目前,世界上能制造出的最小晶体管的长度只有0.00000004m ,将0.00000004用科学记数法表示为17. 在人体血液中,红细胞的直径约为7.7×10-4 cm ,7.7×10-4用小数表示为 18.已知圆锥的底面直径为6,母线长为4,则它的侧面积等于 . 19.一个多边形每个外角都是36︒,则这个多边形的边数是20.已知菱形的两条对角线分别为2cm ,3cm ,则它的面积是 2cm . 21.若点()P x y ,是平面直角坐标系xOy 中第四象限内的一点,且满足24x y -=,x y m +=,则m 的取值范围是 .22.下列四个命题中:①对顶角相等;②同位角相等;③全等三角形对应边相等;④菱形的对角线相等.其中,真命题的有 (填序号).23.如果5x +3与﹣2x +9是互为相反数,则x ﹣2的值是 . 24.若a m =2,a n =3,则a m ﹣n 的值为 . 25.若a ,b 都是实数,b =+﹣2,则a b 的值为 .26.用半径为30的一个扇形纸片围成一个底面半径为10的圆锥的侧面,则这个圆锥的侧面积为 .27.等腰三角形一腰上的高与另一腰的夹角为30°,则它的顶角为 . 28.如果点(m ,﹣2m )在双曲线上,那么双曲线在 象限.29.一个多边形的每一个外角为30°,那么这个多边形的边数为 . 30.命题“同旁内角互补”是一个 命题(填“真”或“假”) 31.用半径为8的半圆围成一个圆锥的侧面,则圆锥的底面半径等于 . 32.等腰三角形一腰上的高与另一腰的夹角为30°,则它的顶角为 . 33.在平面直角坐标系中,点P (m ,1﹣m )在第一象限,则m 的取值范围是 . 34.已知x m =6,x n =3,则x m ﹣n 的值为 . 35.9的平方根是 .36.若一个多边形的内角和是540°,则这个多边形是 边形. 37.若∠α=35°,则∠α的补角为 度.38.如果圆锥的母线长为5cm ,底面半径为2cm ,那么这个圆锥的侧面积为 cm². 二、计算、化简、因式分解类、 39.计算:23()a =________. 40.计算:182⨯=________. 41.分解因式:4m 2﹣16n 2= . 42.化简﹣(﹣)的结果是 . 43.因式分解2a 3b -8ab 3= . 44.因式分解:a 3﹣ab 2= .45.在实数范围内因式分解:23x y y -=_________. 46.计算:|﹣3|﹣1= . 47.化简:= .48.分解因式:3x 2﹣6x+3= . 49.化简:22(5)x x +-= . 50.已知a <0,那么|﹣2a |可化简为 .51.分解因式:x 3y ﹣2x 2y +xy = .52.分解因式:a 3﹣4ab 2= . 53.因式分解2a 3b -8ab 3= .54.在实数范围内分解因式:2232x -= . 55.化简:239m m --= .56.当﹣1<a <0时,则= .三、方程、不等式类57.不等式组()112333x x x +≥+->⎧⎨⎩的解集是__________.58.平面直角坐标系中一点P (m ﹣3,1﹣2m )在第三象限,则m 的取值范围是 . 59.若m 、n 是一元二次方程x 2–5x –2=0的两个实数根,则m +n –mn =_________. 60.设0a <,0b >,且a b >,用“<”号把a ,a -,b ,b -连接起来为__________. 61.关于x 的一元二次方程x 2+2x +m =0有两个相等的实数根,则m 的值是 . 62.已知关于x 的方程x 2+3x ﹣m =0有两个相等的实数根,则m 的值为 . 63.已知关于x 的一元二次方程x 2﹣2x +k =0有两个不相等的实数根,则k 的取值范围是 .64.关于x 的一元二次方程x 2﹣2mx +(m ﹣1)2=0有两个不相等的实数根.则m 的取值范围是 .65.已知关于x 的一元二次方程x 2+bx +1=0有两个相等的实数根,则b 的值为 .66.甲、乙两人在直线道路上同起点、同终点、同方向,分别以不同的速度匀速跑步1500米,先到终点的人原地休息,已知甲先出发30秒后,乙才出发,在跑步的整个过程中,甲、乙两人的距离y (米)与甲出发的时间x (秒)之间的关系如图所示,则乙到终点时,甲距终点的距离是 米.67.已知x =-m 和x =m -4时,多项式ax 2+bx +4a +1的值都相等,且m ≠2.若当-1<x<2时,存在x 的值,使多项式ax 2+bx +4a +1的值为3,则a 的取值范围是 .四、函数类68.反比例函数y=kx(k≠0)的图像经过点A(-2,4),则在每一个象限内,y随x的增大而________.(填“增大”或“减小”)69.已知二次函数y=24x x k-+的图像的顶点在x轴下方,则实数k的取值范围是________.70.如图,点A(1,n)和点B都在反比例函数xky=(x>0)的图像上,若∠OAB=90°,23OAAB=,则k的值是.71.下列关于变量x和y的关系式:①y=x,②2x2-y=0,③y2=x,④2x-y2=0,其中y是x的函数的是 .72.如图,抛物线1C:223y x x=+-的顶点为P,将该抛物线绕点(0)A a,(0)a>旋转180︒后得到抛物线2C,抛物线2C的顶点为Q,与x轴的交点为B,C,点B在点C的右侧.若90PQB∠=︒,则a=.73.已知A(m,3)、B(﹣2,n)在同一个反比例函数图象上,则=.74.一次函数y1=kx+b与y2=x+a的图象如图,则kx+b>x+a的解集是.xyBOA75.如图所示,反比例函数y=(x<0)的图象经过矩形OABC的对角线AC的中点M,分别与AB,BC交于点D、E,若BD=3,OA=4,则k的值为.76.如图,在平面直角坐标系中,A(1,0),B(3,0),点C在第一象限,∠ABC=90°,AC=2,直线l的关系式为:y=﹣x﹣3.将△ABC沿x轴向左平移,当点C落在直线l 上时,线段AC扫过的面积为平方单位.77.已知:M,N两点关于y轴对称,点M的坐标为(a,b),且点M在双曲线y=上,点N在直线y=x+3上,则抛物线y=﹣abx2+(a+b)x的顶点坐标是.78.如图,已知抛物线y=ax2﹣4x+c(a≠0)与反比例函数y=的图象相交于点B,且B 点的横坐标为3,抛物线与y轴交于点C(0,6),A是抛物线y=ax2﹣4x+c的顶点,P 点是x轴上一动点,当PA+PB最小时,P点的坐标为.79.如图,点A(1,n)和点B都在反比例函数xky=(x>0)的图像上,若∠OAB=90°,23OAAB=,则k的值是.80.如图,点A是反比例函数kyx=的图象上的一点,过点A作AB⊥x轴,垂足为B,点C 为y轴上的一点,连接AC,BC,若△ABC的面积为4,则k的值是.五、几何计算、证明类81.如图,在▱ABCD中,∠A=70°,DC=DB,则∠CDB= .82.如图,△ABC是⊙O的内接三角形,∠BAC=60°,的长是,则⊙O的半径是.83.如图,在△ABC纸板中,AC=4,BC=2,AB=5,P是AC上一点,过点P沿直线剪下一个与△ABC相似的小三角形纸板,如果有4种不同的剪法,那么AP长的取值范围是.xyBOA84.如图,在Rt △ABC 中,90C ∠=︒,CD 是AB 边上的中线,且5CD =,则△ABC 的中位线EF 的长是 .85.如图,12∠=∠,添加一个条件 ,使得△ADE ∽△ACB .86.圆锥底面圆的半径为1,侧面积等于3π,则它的母线长为______.87.如果一个正多边形每一个内角都等于144°,那么这个正多边形的边数是 .88.在Rt △ABC 中,∠ABC =90°,AB =6,BC =8,则这个三角形的外接圆的直径长为 .89.如图,△ABC 中,∠C =90°,AC =3,∠B =30°,点P 是BC 边上的动点,则在 ①3.6②4,③5.5,④7,这四个数中AP 长不可能是 (填序号)90.如图,在矩形ABCD 中,AB =4,BC =6,E 是矩形内部的一个动点,且AE ⊥BE ,则线段CE 的最小值为 .91.直线l1∥l2,一块含45°角的直角三角板如图放置,∠1=85°,则∠2=.92.如图,在△ABC中,AB=AC,∠A=40°,点D在AC上,BD=BC,则∠ABD的度数是.93.如图,Rt△ABC中,∠ABC=90°,DE垂直平分AC,垂足为O,AD∥BC,且AB=3,BC =4,则AD的长为.94.在平面直角坐标系中,已知A(2,4)、P(1,0),B为y轴上的动点,以AB为边构造△ABC,使点C在x轴上,∠BAC=90°.M为BC的中点,则PM的最小值为.95.如图将两块三角板的直角顶点重叠在一起,∠DOB与∠DOA的比是2:11,则∠BOC =.96.如图所示,⊙O是△ABC的外接圆,AD⊥BC于D,且AB=5,AC=4,AD=4,则⊙O 的直径的长度是.597.如图,在△ABC中,∠ACB=90°,∠A=30°,BC=4,以点C为圆心,CB长为半径作弧,交AB于点D;再分别以点B和点D为圆心,大于BD的长为半径作弧,两弧相交于点E,作射线CE交AB于点F,则AF的长为.98.我们发现:若AD是△ABC的中线,则有AB2+AC2=2(AD2+BD2),请利用结论解决问题:如图,在矩形ABCD中,已知AB=20,AD=12,E是DC中点,点P在以AB为直径的半圆上运动,则CP2+EP2的最小值是.99.若圆锥的底面半径是10,侧面展开图是一个半圆,则该圆锥的母线长为.100.如图,已知AE∥BD,∠1=130°,∠2=28°,则∠C的度数为.101.如图,在△ABC中,AC=3,BC=4,若AC,BC边上的中线BE,AD垂直相交于O点,则AB=.102.把一块矩形直尺与一块直角三角板如图放置,若∠1=40°,则∠2的度数为.103.如图,在Rt△ABC中,∠C=90°,CD是AB边上的中线,且CD=5,则△ABC的中位线EF的长是.104.已知□ABCD的对角线AC,BD相交于点O,△OAB是等边三角形,若AB=3,则□ABCD 的面积为.105.如图,在Rt△ABC中,∠C=90°,点D是线段AB的中点,点E是线段BC上的一个动点,若AC=6,BC=8,则DE长度的取值范围是.106.如图,△ABC内接于⊙O,∠BAC=120°,AB=AC,BD为⊙O的直径,CD=6,OA交BC 于点E,则AE的长度是.ABDE107.如图,正方形ABCD中,BC=2,点M是AB边的中点,连接DM,DM与AC交于点P,点E在DC上,点F在DP上,若∠DFE=45°,PF=,则DP的长为;则CE=.108.如图,将一块含有30°角的直角三角板的两个顶点叠放在矩形的两条对边上,如果∠1=27°,那么∠2=°.109.如图,平行四边形ABCD的对角线AC,BD交于O,EF过点O与AD,BC分别交于E,F,若AB=4,BC=5,OE=1.5,则四边形EFCD的周长.110.如图,⊙O与正五边形ABCDE的两边AE、CD分别相切于A、C两点,则∠AOC的度数为.111.将一个直角三角板和一把直尺如图放置,如果∠α=43°,则∠β的度数是.112.如图,在Rt△ABC中,∠ACB=90°,D、E、F分别是AB、BC、CA的中点,若CD=3cm,则EF=cm.113.如图,△ABC内接于⊙O,AB为⊙O的直径,∠CAB=60°,弦AD平分∠CAB,若AD=6,则AC=.114.四边形ABCD为⊙O的内接四边形,已知∠A:∠B=4:5,则∠A=度.115.已知△ABC,∠BAC=45°,AB=8,要使满足条件的△ABC唯一确定,那么BC边长度x 的取值范围为.116.如图所示,在正方形ABCD中,G为CD边中点,连接AG并延长交BC边的延长线于E 点,对角线BD交AG于F点.已知FG=2,则线段AE的长度为.117.如图,矩形ABCD的边AB与x轴平行,顶点A的坐标为(2,1),点B与点D都在反比例函数y=(x>0)的图象上,则矩形ABCD的周长为.118.如图,在Rt△ABC中,∠C=90°,AB=10,AC=8.线段AD由线段AB绕点A按逆时针方向旋转90°得到,△EFG由△ABC沿CB方向平移得到,且直线EF过点D.则CG =.119.如图,AB∥EF,设∠C=90°,那么x,y,z的关系是.120.已知□ABCD的对角线AC,BD相交于点O,△OAB是等边三角形,若AB=3,则□ABCD 的面积为.121.在纸上剪下一个圆和一个扇形纸片,使它们恰好围成一个圆锥(如图所示),如果扇形的圆心角为90°,扇形的半径为4,那么所围成的圆锥的高为.122.如图,在▱ABCD中,AD=2AB,F是AD的中点,作CE⊥AB,垂足E在线段AB上,连接EF、CF,则下列结论:(1)∠DCF+∠D=90°;(2)∠AEF+∠ECF=90°;(3)S△BEC=2S△CEF;(4)若∠B=80°,则∠AEF=50°.其中一定成立的是(把所有正确结论的序号都填在横线上)123.T1、T2分别为⊙O的内接正六边形和外切正六边形.设T1的半径r,T1、T2的边长分别为a、b,T1、T2的面积分别为S1、S2.下列结论:①r:a=1:1;②r:b=;③a:b =1:;④S1:S2=3:4.其中正确的有.(填序号)124.如图,点G是△ABC的重心,AG的延长线交BC于点D,过点G作GE∥BC交AC于点E,如果BC=6,那么线段GE的长为.125.如图,已知AE∥BD,∠1=130°,∠2=28°,则∠C的度数为.126.如图,在△ABC中,∠C=90°,BC=6,AC=9,将△ABC平移使其顶点C位于△ABC 的重心G处,则平移后所得三角形与原△ABC的重叠部分面积是.127.如图,将一张矩形纸片ABCD 沿CE 折叠,B 点恰好落在AD 边上,设此点为F ,若AB :BC =4:5,则tan ∠CFD= .128.如图,在△ABC 中,CA =CB =4,∠ACB =90°,以AB 中点D 为圆心,作圆心角为90°的扇形DEF ,点C 恰好在弧EF 上,则图中阴影部分面积为 .129.如图,∠AOB =45°,点M ,N 在边OA 上,OM =x ,ON =x +4,点P 是边OB 上的点,若使点P ,M ,N 构成等腰三角形的点P 恰好有三个,则x 满足的条件是130.如图,在Rt △ABC 中,∠C =90°,点D 是线段AB 的中点,点E 是线段BC 上的一个动点,若AC =6,BC =8,则DE 长度的取值范围是 .131.如图,AD 为△ABC 的外接圆⊙O 的直径,若∠BAD =50°,则∠ACB =________°C DABOABCDE132.如图,△ABC中,∠BAC>90°,BC=5,将△ABC绕点C按顺时针方向旋转90°,点B对应点B′落在BA的延长线上,若sin∠B′AC=910,则AC=________.133.如图,点E,F,G分别在菱形ABCD的边AB,BC,AD上,AE=13AB,CF=13CB,AG=13A D.已知△EFG的面积等于6,则菱形ABCD的面积等于________.六、统计、概率类134.已知一组数据3,4,6,x,9的平均数是6,那么这组数据的方差等于.135.已知一组数据1,2,0,–1,x,1的平均数是1,则这组数据的中位数为__________.136.在九年级体育考试中,某校某班参加仰卧起坐测试的8名女生成绩如下(单位:次/分):44,45,42,48,46,43,47,45,则这组数据的众数为.137.中华文化源远流长,如图是中国古代文化符号的太极图,圆中的黑色部分和白色部分关于圆心中心对称.在圆内随机取一点,则此点取黑色部分的概率是.138.三张扑克牌中只有一张黑桃,三位同学依次抽取,第一位同学抽到黑桃的概率为.139.初三(1)班统一购买夏季校服,统计出各种尺码的校服的数量如下表所示:CDFGABECABB'A'校服的尺码(单位:厘米)160 165 170 175 180 185 195 数量(单位:件) 2 4 10 22 14 6 1 由表可以看出,在校服的尺码组成的一组数据中,众数是.140.某市园林部门为了扩大城市的绿化面积,进行了大量的树木移栽,下表记录的是在相同的条件下移栽某种幼树的棵树与成活棵树:移栽棵树100 1000 10000 20000成活棵树89 910 9008 18004 依此估计这种幼树成活的概率是.(结果用小数表示,精确到0.1)141.某十字路口设有交通信号灯,东西向信号灯的开启规律如下:红灯开启30秒后关闭,紧接着黄灯开启3秒后关闭,再紧接着绿灯开启42秒,按此规律循环下去.如果不考虑其他因素,当一辆汽车沿东西方向随机地行驶到该路口时,遇到红灯的概率是.142.生命在于运动.运动渗透在生命中的每一个角落,运动的好处就在于让我们的身体保持在健康的状态.小明同学用手机软件记录了11月份每天健步走的步数(单位:万步),将记录结果绘制成了如图所示的统计图.在每天所走的步数这组数据中,中位数是万步.143.袋中装有6个黑球和n个白球,经过若干次试验,发现“若从袋中任摸出一个球,恰是黑球的概率为”,则这个袋中白球大约有个.144.某次数学测试,某班一个学习小组的六位同学的成绩如下:84、75、75、92、86、99,则这六位同学成绩的中位数是.145.如图,⊙O的半径为,圆心与坐标原点重合,在直角坐标系中,把横坐标、纵坐标都是整数的点称为格点,则⊙O上格点有个,设L为经过⊙O上任意两个格点的直线,则直线L同时经过第一、二、四象限的概率是.七、规律探究类146.下面是按一定规律排列的代数式:a2,3a4,5a6,7a8,…则第8个代数式是.147.如图:已知正方形的边长为a,将此正方形按照下面的方法进行剪拼:第一次,先沿正方形的对边中点连线剪开,然后对接为一个长方形,则此长方形的周长为;第二次,再沿长方形的对边(长方形的宽)中点连线剪开,对接为新的长方形,如此继续下去,第n次得到的长方形的周长为.148.如图,第一个图形有1个正方形;第二个图形有5个正方形;第三个图形有14个正方形……;则按此规律,第五个图形有个正方形.149.如图,线段AC=n+1(其中n为正整数),点B在线段AC上,在线段AC同侧作正方形ABMN及正方形BCEF,连接AM、ME、EA得到△AME.当AB=1时,△AME的面积记为S1;当AB=2时,△AME的面积记为S2;当AB=3时,△AME的面积记为S3;…当AB=n时,△AME的面积记为S n.当n≥2时,S n﹣S n﹣1=.150.观察下列运算并填空:1×2×3×4+1=25=52;2×3×4×5+1=121=112:3×4×5×6+1=361=192;…根据以上结果,猜想并研究:(n+1)(n+2)(n+3)(n+4)+1=.参考答案:1. 82.1453. x ≠34.3x ≠-5. x ≥﹣16.x ≤27. x ≥﹣1且x ≠08. x ≥9. x ≥﹣且x ≠3 10. x ≥2019 11. x ≥0且x ≠112. 27 13.(﹣2,﹣1) 14. 3.84×10515. 6.7×10616. 4×10-8 17. 0.00077 18. 12π 19. 10 20. 3 21. 42m -<< 22. ①③ 23.﹣6 24. 25. 4 26. 300π 27. 60°或120°28. 第二、四 29. 12 30. 假31. 4 32. 60°或120° 33.0<m <1 34. 2 35. ±3 36. 五 37. 145 38. 10π 39. a 640. 2 41. 4(m +2n )(m ﹣2n ) 42. 43. 2ab (a +2b ) (a -2b ) 44. a (a +b )(a ﹣b ) 45. y(x+3)(x- 3 ) 46. 2 47. 1 48. 3(x ﹣1)2 49. 1025x + 50. ﹣3a . 51. xy (x ﹣1)2 52. a (a +2b )(a ﹣2b ) 53. 2ab (a +2b ) (a -2b ) 54. 2(4)(4)x x +- 55.13m + 56. 2 57. 0 ≤ x <358. 0.5<m <3 59. 7 60. a < - b < b < - a 61. 1 62.- 63. k <3. 64. m >. 65. ±2. 66. 175 67.81<a <2 68. 增大 69. k < 4 70. 2 71. ①② 72.7 73.- 74. x <﹣2. 75. ﹣4. 76. 40 77. (,), 78. (,0) 79. 2 80. ﹣881. 40° 82. 2 83. 3≤AP <4. 84. 5 85. C D ∠=∠(答案不唯一) 86. 3 87. 10 88. 10. 89. ④ 90. 2﹣2.91. 40° 92. 30° 93. 94.95. 70°96. 5 97. 6 98. 68 99. 20 100. 22° 101.102. 130° 103. 5 104. 93 105. 3≤DE ≤5106. 3 107.108. 57° 109. 12 110. 144°.111. 47° 112.3 113. 2 114. 80 115. x =4或x ≥8.116. 12 117.12 118.12.5. 119. x +y ﹣z =90°. 120. 93 121. 122. (1)(2)(4). 123. ①②④ 124.2 125. 22° 126. 3 127. 43128. 2π﹣4129. 0x =,424x =-或442x << 130. 3≤DE ≤5131.40 132. 25 2 /9 133. 27 134. 5.2 135.1 136. 45 137.138 . 1/3 139. 175 140. 0.9141. 142. 1.3 143. 2 144. 85 145. 28146.15a 16 147. 4a +2×a , 2n ﹣1•4a +2×()n a .148. 55 149.150. (n 2+5n +5)2。
C语言考试期末考试复习题及答案一、选择题(1)一个C语言程序总是从()开始执行A)书写顺序的第一个函数B)书写顺序的第一条执行语句C)主函数main( )D)不确定(2)设int x=3,y=4,z=5,则下列表达式中的值为0的是()A) ‘x'&&’y’B)x||y+z&&y—z C) x〈=y D)!((x〈y)&&!z||1)(3)执行以下程序段后,i的值是()int i=10;switch(i+1){case 10:i++; break;case 11:++i;case 12:++i;break;default :i=i+1;}A) 11 B)13 C) 12 D) 14(4)语句while(!e);中的条件!e等价于()A)e==0 B)e!=1 C) e!=0 D)运行时出错(5)用int a[4]={1,2}; 对数组进行初始化后,数组元素a[3]的值是()A)随机值B) 0 C) 1 D)F(6)在执行char str[10]=“china\0”;strlen(str)的结果是()A)5 B) 6 D) 7 D 9(7)若有定义,char *p=”computer";则语句printf(“%c”,*(p+2))运行结果是()A) 随机值B) m C)o D)omputer(8)在以下函数调用语句中fun1(x,10,(x,10),fun2(y,10,(y,10)));函数fun1参数的个数为()A) 8 B) 4C)5 D)编译出错(9)在说明一个结构体变量时系统分配给它的存储空间是()A)该结构体中第一个成员变量所需存储空间B)该结构体中最后一个成员变量所需存储空间C)该结构体中占用最大存储空间的成员变量所需存储空间D) 该结构体中所有成员变量所需存储空间的总和Key:CDCAB ABBD1。
用C语言编写的代码程序A)可立即执行B)是一个源程序C)经过编译即可执行D)经过编译解释才能执行2。
总复习题目和答案一、选择题(每题2分,共20分)1. 以下哪项不是计算机的基本组成部分?A. 中央处理器(CPU)B. 内存C. 硬盘D. 打印机2. 光合作用主要发生在植物的哪个部位?A. 根B. 茎C. 叶绿体D. 花3. 根据牛顿第二定律,力的大小与物体质量和加速度的关系是什么?A. 力 = 质量× 加速度B. 力 = 质量÷ 加速度C. 力 = 加速度÷ 质量D. 力 = 加速度 + 质量4. 以下哪个不是英语语法中的时态?A. 一般现在时B. 一般过去时C. 一般将来时D. 进行时5. 以下哪个不是四大文明古国?A. 古埃及B. 古巴比伦C. 古印度D. 古希腊6. 根据化学元素周期表,氧的原子序数是多少?A. 8B. 16C. 20D. 287. 以下哪个不是二次方程的解法?A. 直接开平方法B. 配方法C. 因式分解法D. 代入法8. 以下哪个不是人体必需的微量元素?A. 铁B. 锌C. 钠D. 硒9. 以下哪个不是常见的网络攻击类型?A. 钓鱼攻击B. 拒绝服务攻击C. 社交工程攻击D. 病毒攻击10. 以下哪个不是联合国安全理事会的常任理事国?A. 中国B. 法国C. 德国D. 俄罗斯答案:1-5 D C A A D6-10 B D C C C二、填空题(每空1分,共10分)11. 光年是天文学中用来表示______的单位。
答案:距离12. 在数学中,一个数的平方根是指一个数乘以它自己等于原数的数,例如4的平方根是______。
答案:±213. 根据达尔文的进化论,物种的进化是通过______实现的。
答案:自然选择14. 英语中的不规则动词变化是指动词的过去式和过去分词与原形不同,例如“go”的过去式是“went”,过去分词是______。
答案:gone15. 人体最大的器官是______。
答案:皮肤三、简答题(每题5分,共30分)16. 请简述牛顿第一定律的内容。
小学数学总复习专题讲解及训练(一)一、填空。
1、( )÷15=0.8=( )%=( )成2、篮球个数是足球的125%,篮球比足球多()%。
3、一个圆锥的体积是76立方厘米,底面积是19平方厘米。
这个圆锥的高是()厘米。
4、如果3a=4b,那么a : b = ( ):()。
5、一个直角三角形中,两个锐角度数的比是3 : 2 ,这两个锐角分别是()度、()度。
6、12的约数中可以选出4个数组成一个比例,请你写出比值不同的两组:()、()。
7、一个比例里,两个外项正好互为倒数,其中一个内项是2.5,另一个内项是()。
8、一个圆柱的底面半径为2厘米,侧面展开后正好是一个正方形,圆柱的体积是()立方厘米。
9、一个长为6厘米,宽为4厘米的长方形,以长为轴旋转一周,将会得到一个底面直径是()厘米,高为()厘米的()体,它的体积是()立方厘米。
二、选择。
1、圆的面积和它的半径 . A、成正比例 B、成反比例 C、不成比例2、下列说法正确的有。
A、表示两个比相等的式子叫做比例。
B、互质的两个数没有公约数。
C、分子一定,分数值和分母成反比例。
D、圆锥的体积等于圆柱体积的。
3、圆柱的底面半径扩大2倍,高不变。
它的底面积扩大倍,侧面积扩大倍,体积扩大倍。
A 2 、 B 4 、 C 8 、 D 164.六(2)班人数的40%是女生,六(3)班人数的45%是女生,两班女生人数相等。
那么六(2)班的人数_____六(3)班人数。
A. 小于 B. 等于 C .大于 D.都不是5.把一团圆柱体橡皮泥揉成一个与它等底的圆锥体,高将 _______A.扩大3倍B.缩小3倍C.扩大6倍D.缩小6倍三、计算。
1、用递等式计算。
(12分)0.16+4÷(-) 1.7+3.98+5 4.8×3.9+6.1×42、解方程。
(6分)2X+3×0.9=24.7 0.3 :x=17 :51 =0.5四、画一画。
《C程序设计》期末复习练习题及参考答案(3)《C程序设计》期末复习练习题及参考答案(3)一、单项选择题1.若有定义int (*p)[4],则标识符p是一个。
A)指向整型变量的指针变量B)指向函数的指针变量√C)指向有四个整型元素的一维数组的指针变量D)指针数组名,有四个元素,每个元素均为一个指向整型变量的指针2.下列对字符串的定义中,错误的是:。
√A) char str[7] = "FORTRAN";B) char str[] = "FORTRAN";C) char *str = "FORTRAN";D) char str[] = {'F','O','R','T','R','A','N',0};3.针对下面程序段,下面哪些说法是正确的?#include <stdio.h>void Swap(int *x, int *y);main()1{ int a, b;a = 5;b = 9;Swap(&a, &b);printf("a=%d,b=%d",a,b);}void Swap(int *x, int *y){ int *pTemp;*pTemp = *x;*x = *y;*y = *pTemp;}A) 程序运行结果为乱码;B) 程序运行后将导致程序崩溃;C) 程序编译时出错导致程序无法运行;√ D) 程序执行了危险的操作;4.已知学生记录描述为:struct student{ int no;char name[20];char sex;struct{ int year;char month[15];2int day;}birth;};struct student s;设变量s中的生日是1984年11月11日,下列对生日的正确赋值方式是_____A) s.birth.year = 1984; s.birth.month = "11"; s.birth.day = 11;B) s.birth.year = 1984; s.birth.month = 11; s.birth.day = 11;√ C) s.birth.year = 1984; strcpy(s.birth.month, "11"); s.birth.day = 11;D) s.birth.year = 1984; strcpy(s.birth.month, 11); s.birth.day = 11;5. 要使下面程序的输出1, 2, 34,则从键盘输入的数据格式应为。
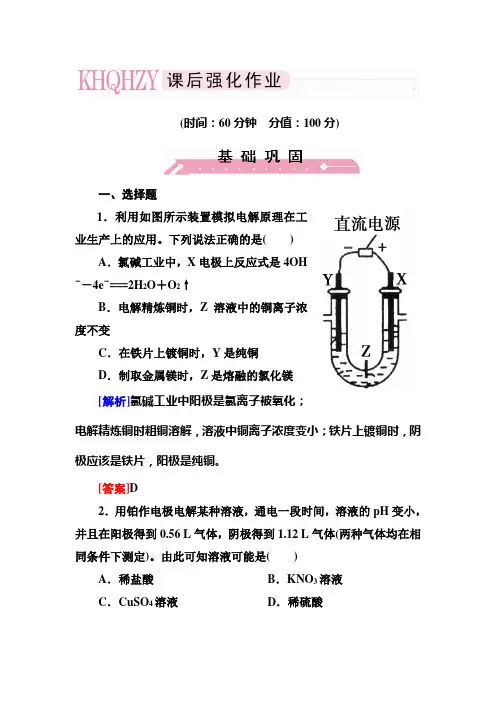
(时间:60分钟分值:100分)一、选择题1.利用如图所示装置模拟电解原理在工业生产上的应用。
下列说法正确的是()A.氯碱工业中,X电极上反应式是4OH--4e-===2H2O+O2↑B.电解精炼铜时,Z溶液中的铜离子浓度不变C.在铁片上镀铜时,Y是纯铜D.制取金属镁时,Z是熔融的氯化镁[解析]氯碱工业中阳极是氯离子被氧化;电解精炼铜时粗铜溶解,溶液中铜离子浓度变小;铁片上镀铜时,阴极应该是铁片,阳极是纯铜。
[答案]D2.用铂作电极电解某种溶液,通电一段时间,溶液的pH变小,并且在阳极得到0.56 L气体,阴极得到1.12 L气体(两种气体均在相同条件下测定)。
由此可知溶液可能是()A.稀盐酸B.KNO3溶液C.CuSO4溶液D.稀硫酸[解析]阳极与阴极产生的气体体积比为0.56 L1.12 L=12,相当于电解水,pH变小,说明电解了含氧酸。
[答案]D3.如下图,四种装置中所盛的溶液体积均为200 mL ,浓度均为0.6 mol·L -1,工作一段时间后,测得导线上均通过了0.2 mol 电子,此时溶液的pH 由大到小的顺序是( )A .④②①③B .④③①②C .④③②①D .①③②④[解析]装置①中,2CuSO 4+2H 2O=====电解2Cu +O 2↑+2H 2SO 4,溶液的pH 减小;装置②中,Zn +H 2SO 4===ZnSO 4+H 2↑,溶液的pH 增大但小于7;装置③是在Fe 上镀Zn ,ZnCl 2溶液的物质的量浓度不变,pH 也不变;装置④中,2NaCl +2H 2O=====电解2NaOH +H 2↑+Cl 2↑,溶液的pH 增大。
故①~④装置中溶液的pH 大小关系为④>③>②>①。
[答案]C4.现有阳离子交换膜、阴离子交换膜、石墨电极和如右图所示的电解槽,用氯碱工业中的离子交换膜技术原理,可电解Na 2SO 4溶液生产NaOH溶液和H2SO4溶液。
-数控原理与应用总复习一、名词解释1、数字控制2、数控技术3、数控系统4、插补5、机床刚度6、译码7、DNC加工8、随动系统9、系统精度10、分辨率11、步距角12、脉冲当量二、填空题1、数控系统包括:2、数控机床的主要组成部分3、数控装置的组成4、数控机床分类按轨迹按伺服5、典型数控机床的机械结构主要有什么组成6、数控机床机械结构中基础件的作用7、对数控机床进给传动系统的主要要求是什么8、机床总体方案设计有那三部分组成9、数控机床主传动系统是传递什么的部件10、对数控机床主轴部件的主要要求有那几个11、数控机床自动换刀装置有那几种12、CNC系统有那几部分组成13、CNC装置的工作过程包括那几部分14、单微处理器硬件结构包括那些15、CNC 系统软件处理中的两个突出特征是多任务并行处理和多重实时中断。
16、刀具半径补偿的过程分那三步17、C刀补中,转接过渡形式有几种?18、PLC的组成19、数控系统的输出量是什么20、数控系统检测装置的作用21、数控机床三环系统是指22、数控伺服分类23、数控机床中常用的驱动元件有24、切削加工工序安排顺序原则25、影响数控加工切削用量的因素有那些三、简答题1、机床数字控制的原理2、数控系统的主要组成部分,及各部分作用3、何谓点位控制、点位直线控制、轮廓控制 ? 三者有何区别 ?4、什么是主轴准停装置,它的作用是什么5、提高数控机床进给系统机械结构性能可以采用的措施有?6、CNC 装置的主要功能是什么7、CNC 系统软件一般包括哪几个部分?各完成什么工作?答: CNC 系统软件一般由输入数据处理程序、插补运算程序、管理程序和诊断程序等组成。
各部分作用分述如下:• 输入数据处理程序:接受输入的零件加工程序,将其用标准代码表示的加工指令和数据进行翻译和整理,按规定的格式存放。
有些系统还要进一步进行刀具半径偏移的计算或为插补运算和速度控制进行一些预处理。
• 插补计算程序:完成 NC 系统中的插补器的功能。
C++总复习关于上机测试说明上机答题须知:1. 答题源程序必须上传到FTP服务器上的1000文件夹中,登录名为jsj,密码为:1052。
2. 主项目文件主名必须为学号,其中包含两个项目,分别为project1和project2。
单击学号目录下的“09123456.dsw”就能用VC6.0打开。
3. 必须严格按题目要求的输入、输出格式来输入、输出。
4. 除非题目中另有要求,假定输入的数据总是正确的。
5. 结果的评判以建立项目的方法、试题要求、程序的运行结果和代码的优化为准。
关于期末笔试考试1. 闭卷考试。
2. 题型:选择题(30);基本概念填空(10);读程序写结果填空(24);完善程序填空(16);写程序(20,3小题)3. 写程序的判分标准为按评分点给分。
第二章数据类型和输入输出✓常用C++关键字✓基本数据类型及其显式、隐式转换✓变量与常量的定义✓各种字面量的性质和表示方式,如整型数如何表示,实型数如何表示(小数形式、指数形式)✓输入、输出。
包括printf、scanf和cout、cin.✓转义字符和特殊字符的表示。
如:“、…、%说明:1. cout的格式输出不要求;2. printf和scanf的格式输出输入要求掌握d、f、c、s 4种格式3. 不要混用两种输入输出方法数据类型知识要点标识符是程序员为符号常量、变量名、函数名所命的名字,不能使用c++中已定义的名字命名。
变量是存储单元的标识,其值是可以改变的;而常量是存放在存储单元的值;常量和变量都有类型之分,不同的类型所对应的存储单元的大小不同。
整型数据有长短之分、有无符号之分;同一个整型数据还可以用不同的进制表示;实型数据有单精度、双精度、长双精度三种,其表示方法有十进制小数形式和指数形式,但在存储器里的存储方法一致,只不过长度不同;字符型数据一般用单引号表示,有转义字符;注意字符型数据和整型数据之间的区别和联系、字符型数据与字符串数据的区别。
2012年 第一章 有理数的概念一、选择题:1.下列命题中,正确的是 ( ) A 有限小数是有理数 B 无限小数是无理数 C 数轴上的点与有理数一一对应 D 数轴上的点与实数一一对应2.四位同学画数轴如下图所示,你认为正确的是 ( )A B C D3.下列说法正确的是 ( ) A 绝对值较大的数较大 B 绝对值较大的数较小 C 绝对值相等的两数相等 D 相等两数的绝对值相等4.若a 与b 互为相反数,则下列式子成立的是 ( ) A 0=-b a B 1=+b a C 0=+b a D .0=ab5.数轴上原点和原点左边的点表示的数是 ( ) A 负数 B 正数 C 正数或零 D 负数或零6.下列比较中,正确的是 ( )A331212-<<- B212313-<<- C 210->-> D 201-><- 7.a--是一个 ( )A 正数 B 负数 C 正数或零 D 负数或零8.下列命题中正确的是 ( )A 3和-是互为相反数 B 3和-3是互为倒数 C 绝对值为3的数是-3D -3的绝对值是39.数x 由四舍五入得到的近似数是35.0,数x 不可能是 ( ) A 35.049 B 34.974C 35.052 D 34.95910.若a 为实数,下列代数式中,一定是负数的是 ( )A 2a - B 2)1(+-a C a - D )1(+--a11.若)(21++n m b a ·)(35212b a b a m n =-,则n m +的值为 ( ) A 1 B 2 C 3 D -312.据6月4日《苏州日报》报道,今年苏州市商品房销售量迅速增加,1~4月商品房销售金额高达1 711 000 00O 元,这个数用科学计数法表示是 ( )A 1.711×610B 1.711×910C 1.711×1010D 1711×61013.在0,1-,1,2的四个数中,最小的数是 ( ) A. 0 B 1- C 1 D. 214.张玲身高h ,由四舍五入后得到的近似数为1.5米,正确表示h 的值是 ( ) A 1.43米 B 1.56米 C 1.41≤ h ≤ 1.51 D 1.41≤ h <1.55 二、填空题:14.2001年3月,国家统计局公布我国总人口为129533万人.如果以亿为单位保留两位小数,可以写成约为____________亿人;15.计算:)3()20()100(---⨯-= ;16.2)1(-的相反数是_______;17.已知5,10=-=b a ,代数式)(b a --的值是 ; 18.如果ba b a ><<,0,0,那么0____b a -;如果ba b a <<<,0,0,那么___b a -0;19.21的倒数的相反数的3次幂等于 ;20.把3729000-用科学记数法可表示为 ; 21.41030.3⨯有 个有效数字,它精确到 位; 22.方程275=+x 的解的2003次幂是 ; 23.若0<m ,则_____=+m m ,若0>m ,则______=+m m ,若0=m ,则______=+m m ;24.0)4(|3||2|2=+-+-++z y x ,则.____=+zy x x 25.观察下列算式:21=2;22=4;23=8;24=16;25=32;26=64;27=128;28=256;……通过观察,用你所发现的规律写出811的末位数字是 ;26.已知:1+3=22;1+3+5=32;1+3+5+7=42;1+3+5+7+9=52; ……… 根据前面各式的规律,可猜测:1+3+5+7+…+_____12=+n ;27.观察下列等式:41314313121321211211-=;-=;-=⨯⨯⨯; ……。
填空题总复习题及参考答案填空题1、两平⾏⽆限⼤均匀带电平⾯的电荷⾯密度分别为σ+和σ2-,如图所⽰,则图中?,П,Ш区域的电场强度的⼤⼩1E = ,2E = 。
2、平⾏板电容器充电后与电源断开,然后充满相对电容率为r ε的各向均匀介质,其电容C 将,两极板间的电势差将。
(填减⼩、增⼤或不变) 3、⼀磁场的磁感应强度为k c j b i a B ++=,则通过⼀半径为R ,开⼝向Z ⽅向的半球壳,表⾯的磁通量⼤⼩为 Wb4、电阻R =2Ω的闭合导体回路置于变化磁场中,通过回路包围⾯的磁通量与时间的关系为)Wb (10)285(32-?-+=Φt t m ,则在t=2s ⾄t=3s 的时间内,流过回路导体横截⾯的感应电荷=i q C 。
5、波长为λ的平⾏单⾊光垂直照射到折射率为n 的劈形膜上,相邻的两明纹所对应的薄膜厚度之差是_______________。
6、波长为 632.8 nm 的激光,垂直照射在间距为 1.2 mm 的双缝上,双缝到屏幕的距离为 500 mm ,则两条第4级明纹的距离为。
7、⽤氦氖激光器发出的波长为633 nm 的单⾊光做⽜顿环实验,测得第 k 个暗环的半径为5.63 mm , 第 k+5 暗环的半径为7.96 mm ,则平凸透镜的曲率半径R 为。
8、纳⽶材料的有、、、等。
9、玻尔的氢原⼦理论的三个基本假设是:、和⾓动量量⼦化条件。
10、当绝对⿊体的温度从100K 升到200K 时,其辐射出射度增加为原来的________倍。
(1,1E =02εσ,2E =023εσ, 2,增⼤,减⼩、3,c R 2π,4,21065.1-?,5, 2n 6,2.1? 10-3m ,7, 2.5m 8、光学纤维、磁记录、超导体、机器⼈ 9,定态概念(定态条件),频率条件(定态跃迁)10、16倍。
)11、如图所⽰,A 、O 两点分别有点电荷+Q 和-Q ,且AB=BO=OD=R ,把⼀检验电荷+q 从B 点沿BCD 移动到D点的过程中,电场⼒做功为。
文学常识题1、下列对文学常识的表述,不正确的一项是()A、《鲁提辖拳打镇关西》节选自《水浒传》,作者施耐庵。
B、《关睢》和《蒹葭》两首诗都选自《诗经》。
C、《江城子。
密州出猎》中的”江城子”为词牌名。
D、《破阵子。
为陈同甫赋壮词以寄之》选自《稼轩长短句》,作者苏轼。
2、下列文学常识表述有误的是()A、《春》和《背影》的作者是朱自清。
B、《马说》和《捕蛇者说》的作者分别是柳宗元、韩愈。
C、"大漠孤烟直,长河落日圆”出自唐代诗人王维的《使至塞上》。
D、《最后一课》的作者都德和《我的叔叔于勒》的作者莫泊桑都是法国作家。
3、下列文学常识表述不完全正确的是()A、《关睢》是我国第一部诗歌总集《诗经》中的作品,《天净沙.秋思》是元朝马致远所作的散曲.B、《枣核》和《背影》是叙事散文,《白杨礼赞》和《春》是抒情散文。
C、按写作年代的先后排列下面的文章正确的顺序是《出师表》《捕蛇者说》《醉翁亭记》《陋室铭》.D、鲁迅的《孔乙己》、契诃夫的《变色龙》和马克。
吐温的《竞选州长》都是小说。
4、下列判断有误的一项是()A、莎士比亚是英国杰出的戏剧家和诗人。
《威尼斯商人》是莎士比亚的著名喜剧。
B、在中国文学史上的"唐宋八大家"中,有苏氏三父子,他们是父亲苏洵,儿子苏轼和苏辙.C、《木兰诗》是我国南北朝时期北方的一首乐府民歌,它叙述了木兰女扮男装、代父从军、建功立业、辞官还乡的故事。
D、我们学过的鲁迅的《故乡》、《藤野先生》都出自他的散文集《朝花夕拾》。
5、选出下列文学常识判断错误的一项()A、《桃花源记》的作者是陶渊明,宋代人,他的作品还有《岳阳楼记》.B、苏轼《水调歌头》中的"但愿人长久,千里共婵娟”,表达了与亲人共赏人间美景的心愿,体现了诗人积极乐观的人生态度。
C、《雪》选自鲁迅的散文诗集《野草》,他的代表作品有小说《孔乙己》。
D、《左传》相传是春秋时期左丘明所作,是根据鲁史写的编年体史书。
《用字母表示数》(总复习)-五年级上册数学人教版一.填空题(共8小题)1.一条长为a米的路,小雪每分钟走x米,走了6分钟后,走了米,还剩米.2.小明买了n瓶可乐,每瓶售价2.80元,他付了50元。
算式50﹣2.8n表示的意思是。
在15,25,30这三个数中,可能是n的值。
3.李老师买了5个篮球,每个篮球m元,付300元,应找回元。
如果m=46.8,应找回元。
4.王老师买了13个同样的文具盒,每个文具盒x元。
王老师递给售货员100元,应找回元;如果找回的钱是22元,则x=。
5.少年宫舞蹈队有a人,合唱队的人数比舞蹈队的3倍少15人,合唱队有人,两队一共有人。
6.省略乘号写出下面各式。
a×a a×3.75×b a×17.小明做了a道口算题,错误率是2%,他做错了道题。
8.妈妈今年a岁,比童童大26岁,再过x年后,妈妈和童童相差岁。
二.选择题(共3小题)9.a是一个不等于0的自然数,下面()算式的得数最大。
A.a×1B.a×0.9C.a×1.110.学校篮球队有a名女生,男生是女生的3倍,男生比女生多()人。
A.3﹣a B.3a C.2a D.a11.比x的5倍多3的数,用式子表示是()A.(X+3)×5B.3X+5C.5X+3三.判断题(共5小题)12.如果m是奇数,那么2m+1一定是2的倍数。
13.1+x不能简写成x14.2×a表示两个a相乘。
15.甲数是a,比乙数的4倍少b,求乙数的式子是4a﹣b.16.小红今年a岁,比小芳小2岁,小芳今年(a+2)岁。
四.综合题(共10小题)17.直接写得数8×n=a×9+b=t×t=m×n=432﹣73﹣27=4×2×25=45+145=78a﹣19a=72÷9×7=76+19+24=560﹣397=8×99+8=18.连线:19.一个书包38元,一个足球的价钱是书包的x倍,这个足球多少元?(先填空,再列式解答)要求这个球多少元,就是求个元是多少。
3ae bc C语言程序设计参考题型说明:★本题仅反映考试的题型,作为考前复习参考。
★要通过这些典型题目,掌握复习要点中所列内容。
所给题目不可死记硬背,而是通过题目掌握其涉及要点和重要算法。
一、单项选择题1.C程序的基本构成单位是【C 】A)文件B)命令C)函数D)语句2.下列叙述中错误的是【C 】A)C程序中main( )函数的位置可以任意B)C程序可以由多个程序文件组成, 而一个程序文件又可以由一个或多个函数组成C)每个程序文件都有一个main( )函数D)C程序总是从main( )开始执行,也是由它结束3.将C源程序转换为目标程序的过程称为【B 】A)编辑B)编译C)连接D)运行4.C语言中最基本的数据类型包括【B 】A)整型、实型、逻辑型B)整型、实型、字符型C)整型、逻辑型、字符型D)整型、实型、字符串型5.以下不合法的用户标识符是【C 】A)j2_KEY B)Double C)4d D)_8_6.C源程序中不能表示的数制是【A 】A)二进制B)八进制C)十进制D)十六进制7.以下合法的字符常量的是【A 】A)'\x13' B)'\081' C)'65' D)"\n "8.以下选项中,能用作数据常量的是【D 】A)o115 B)0118 C)1.5e1.5 D)115L9.C语言中,要求运算对象必须是整型数据的运算符是【A 】A)% B)/ C)\ D)&&10.表示数学关系“x≥y≥z”的C语言表达式是【C 】A)x>=y>=z B)x>=y || y>=z C)x>=y&&y>=z D)x≥y≥z11.若变量均已正确定义并赋值,以下合法的C语言赋值语句是【A 】A)x=y==5; B)x=n%2.5; C)x+n=j; D)x=5=4+1;12.设有定义:int k=0; 以下选项的四个表达式中与其他三个表达式的值不相同的是【A 】A)k++ B)k+=1 C)++k D)k+113.若有代数式:以下错误的C语言表达式是【 C 】A)a/b/c*e*3 B)3*a*e/b/c C)3*a*e/b*c D)a*e/c/b*314.设变量a是整型,f是实型,i是双精度型,则表达式10+'a'+i*f值的数据类型为【C 】A)int B)float C)double D)不确定15.若p和x已经正确定义,x已赋值,并且p=&x,则下列关系表达式之值为1的是【B】A)p==x B)*p==x C)&p==x D)*x==p16.当用户要求输入的字符串中含有空格时,应使用的输入函数是【C 】A)scanf() B)getchar() C)gets() D)getc()17.下列能输出字符数组str中字符串的语句是【B 】A)printf("%c",str[0]); B)printf("%s",str);C)printf("%s",str[]); D)putchar(str);18.有输入语句:scanf("%d,%d",&a,&b);为使变量a、b分别为5和3,从键盘输入数据的正确形式为【 B 】A)5 3<回车> B)5,3<回车> C)a=5 b=3<回车> D)a=5,b=3<回车> 19.定义如下变量和数组:int j;int x[3][3]={1,2,3,4,5,6,7,8,9};则下面语句的输出结果是【 C 】for(j=2; j>=0; j--)printf("%2d",x[j][2-j]);A)1 5 9 B)1 4 7 C)7 5 3 D)3 6 920.执行下面程序后,a的值是【B 】#define SQR(x) x*xvoid main( ){ int a=10,k=2,m=1;a=SQR(k+m);printf("%d\n",a);}A)10 B)5 C)2 D)121.简单if语句的基本形式:if(表达式)语句【D 】其中“表达式”A)必须是逻辑表达式B)必须是关系表达式C)必须是逻辑表达式或关系表达式D)可以是任意合法的表达式22.在嵌套使用if语句时,C语言规定else总是【C 】A)和之前与其具有相同缩进位置的if配对B)和之前与其最近的if配对C)和之前与其最近的且不带else的if配对D)和之前的第一个if配对23.下列叙述中正确的是【D 】A)break语句只能用于switch语句B)在switch语句中必须使用defaultC)break语句必须与switch语句中的case配对使用D)在switch语句中,不一定使用break语句24.有以下程序段:x=-1;dox=x*x;while(!x);执行时,循环体执行的次数为【B 】A)0 B)1 C)2 D)不确定25.以下不正确的if语句形式是【C 】A)if(x>y&&x!=y); B)if(x==y) x+=y;C)if(x!=y) scanf("%d",&x) else scanf("%d",&y); D)if(x<y) {x++;y++;}26.以下程序的输出结果是【C 】void main( ){ int x=2,y=-1,z=2;if(x<y)if(y<0) z=0;else z+=1;printf("%d\n",z);}A)0 B)1 C)2 D)327.以下能正确计算1×2×3×…×10的程序段是【A 】A)i=1,s=1; B) s=1;i=1;do while(i<=10){s=s*i;i++;} s=s*(++i);while(i<11);C)for(i=1,s=0;i<=10;i++) D) for(i=1,s=1;;i++)s=s*i; s=s*i;28.若j为整型变量,则以下循环执行次数是【C 】for(j=0;j==0;) printf("%d",j--);A)无限次B)0次C)1次D)2次29.若有说明:int a[10];则对a数组元素的正确引用是【C 】A)a[3.5] B)a(8) C)a[6-5] D)a[10]30.若有定义语句:double x[5]={1.0,2.0,3.0,4.0,5.0}, *p=x;则错误引用x 数组元素的是【B 】A)*p B)x[5] C)*(p+1) D)*x31.C中,一个char类型的数据在内存中占用的字节数是【A 】A)1 B)2 C)4 D)832.设有程序段:int k=5;while (k<=0)k--;则下列描述中正确的是【 C 】A)while循环执行5次B)循环是无限循环C)循环语句一次也不执行D)循环体语句执行一次33.下面程序段的运行结果是【B 】char c[5]={ 'a', 'b', '\0', 'c', '\0' };printf(“%s”, c);A)'a''b' B)ab C)Abc D)"abc"34.以下不正确的字符串赋值语句是【C 】A)char *s; s="abcde"; B)char s[ ]="abcde";C)char s[10]; s="abcde"; D)char *s="abcde";35.设p1、p2是指向int型一维数组的指针变量,k为int型变量,以下错误的语句是【B 】A)k=*p1+*p2; B)p2=k; C)p1=p2; D)k=p2-p1;36.下面程序的输出结果是【A 】void main( ){ char s[]= "ABCD";char *p;for (p=s;p<s+4;p++)printf(“%s\n”, p);}A)ABCD B) A C)D D) ABCDBCD B C ABCCD C B ABD D A A37.以下关于C函数的定义和调用描述正确的是【B 】A)函数的定义可以嵌套,但函数的调用不可嵌套B)函数的调用可以嵌套,但函数的定义不可嵌套C)函数的定义和调用均可以嵌套D)函数的定义和调用均不可嵌套38.以下关于变量的存储类型和作用域说法错误的是【C 】A)函数内定义的变量默认存储类型为auto,函数调用结束时释放其值B)静态局部变量的生存期虽然被延长,但作用范围依然只限于所在函数内有效C)寄存器变量主要用于使用频度较高的变量,其资源依然使用计算机内存D)外部变量可以跨文件使用,但静态外部变量不允许跨文件使用39.以下关于变量的作用域叙述不正确的是【D 】A)在函数内部定义的变量是局部变量B)函数中的形式参数是局部变量C)局部变量的作用范围仅限于其所在函数或复合语句D)全局变量的作用范围仅限于其所在的文件40.以下关于C函数参数说法不正确的是【B 】A)实参可以是常量、变量和表达式B)形参可以是常量、变量和表达式C)实参和形参可以为任意数据类型D)实参与对应的形参类型一致41.以下关于C函数返回值的叙述正确的是【D 】A)被调函数中只有使用return语句才能返回主调函数B)使用一个return语句可以返回多个函数值C)函数返回值类型取决于return语句中的表达式类型D)函数返回值类型取决于定义该函数时所指定的类型42.以下数组定义中错误的是【B 】A)int x[][3]={0}; B)int x[2][3]={{1,2},{3,4},{5,6}};C)int x[][3]={{1,2,3},{4,5,6}};D)int x[2][3]={1,2,3,4,5,6};43.若有定义语句:char s[10]="1234567\0\0";则strlen(s)的值是【A】A)7 B)8 C)9 D)1044.给定以下程序段:int n=10;while (n>6){ n--;printf(“%3d”,n);}以上程序段输出结果是【D】A)10 9 8 B)9 8 7 C)10 9 8 7 D)9 8 7 645.若i,j已定义为int型,则以下程序段中内循环总的执行次数是【C 】for (i=5; i>0; i--)for (j=1; j<6; j++){……}A)30 B)24 C)25 D)2046.若已定义:float *p, m=3.14159; 则使p指向m正确的赋值语句是【B 】A)p=m; B)p=&m; C)*p=m; D)*p=&m;47.若已定义:char s[10]; 则下面表达式中不能作为s[1]地址的是【A 】A)s++ B)s+1 C)&s[0]+1 D)&s[1]48.已知:int a=3, b=5, t; 要将a和b中的数值进行交换,错误..的程序段是【C 】A)a=a+b; b=a-b; a=a-b; B)t=a; a=b; b=t;C)t=a; b=a; a=t; D)t=b; b=a; a=t;49.关于C程序中的#include <math.h>,错误..的描述是【 D 】A)它是C语言的预编译命令B)在程序中该行尾部不需要分号C)用于将math.h包含进来D)math.h是一个函数50.下列C程序段的输出结果是【C 】int a=0;switch(a){ case 0: printf(“a=0”);case 1: printf(“a=1”);default: printf(“default”);}A)a=0 B)a=0default C)a=0a=1default D)default51.已知:int a, x, y; 有语法错误..的C语句是【 B 】A)while(x) y++; B)while(x+y=0) a++;C)while(x<y); D)while(y=5) ++x;52.对于do … while( )语句,错误..的说法是【C 】A)用条件控制循环体的重复执行B)循环体至少要执行一次C)循环体有可能一次也不执行D)循环体中可以包含若干条语句53.已知:int a, x, y; 有语法错误..的C语句是【 B 】A)while(x) y++; B)while(x+y=0) a++;C)while(x<y); D)while(y=5) ++x;54.已知:int a[5], *p=a; 利用p为数组元素a[4]赋值的正确C语句是【B】A)scanf(“%d”, p+3); B)scanf(“%d”, p+4);C)scanf(“%d”, *(p+3)); D)scanf(“%d”, *(p+4));55.对于C语句:char *a[2]={“abcd”, “ABCD”}; 叙述正确的是【B 】A)a是指针变量B)a是指针数组C)a是数组指针 D)a是字符串56.设有如下说明语句:struct ex{ int x; float y; char z; } example;则下面叙述中不正确的是【 B 】A)struct是结构体类型的关键字B)example是结构体类型名C)x, y, z都是结构体成员名D)struct ex是结构体类型名57.有以下程序#include <stdio.h>struct ord{ int x,y;} dt[2]={1,2,3,4};void main(){ struct ord *p=dt;printf(“%d,”,++p->x); printf(“%d\n”,++p->y);}程序的运行结果是【B 】A)1,2 B)2,3 C)3,4 D)4,158.设有以下定义【D 】union data{ short int d1; char d2; }demo;则下面叙述中错误的是____。
二、填空题1.设x,y 为整型变量,能正确表达数学关系y=2x 2的C++表达式是 y=2*x*x 。
2.用 符号常量 来声明数组长度,可使程序灵活性更大。
3.已知int a[3][3] = {{1,2,3},{4,6},{7,8,9}},则数组元素a[1][1]的值是 6 。
4.在C++中使用 inline 关键字来定义内联函数。
5. 表达式pow (2.8,sqrt (double (x )))值的数据类型为___double ______。
6. 有语句:char k=‘\a ’;则变量k 中包含的字符个数是_____。
7.“A ”与‘A ’的区别是:前者表示的是____字符串______,占用___2___个内存空间,后者表示的是____字符_____,占用___1____个内存空间。
8.设X为整型变量,能正确表达数学关系252a b ca-的C++表达式是 (a*a*b-5*c )/(2*a ) 。
9.具有相同函数名但具有不同形参列表的函数称为 重载函数 。
10.数组元素a[i+1]是数组a 中的第 i+2 个元素。
11.假设有如下函数声明:void func(int x=80),则函数调用func();与函数调用 func(80) 等价。
12.已知int a[3][2] = {{4,5},{7,8}},则数组元素a[2][0]的值是 0 。
13.C++程序的开发流程为 编辑 、 编译 、 链接 和 运行 。
16. 数据在计算机中都是以 二进制 形式存放的。
17. 设x,y ,z 的值分别为1,2,3,则表达式(x+y++, z=y+1, ++z)的值为 5 。
18. 设a=1,b=2,c=3,d=4,则条件表达式a >b ? a : c > d ? c : d 的值为_____4_____。
19. 在执行语句: int a[ ][3]={1,2,3,4,5,6}; 后,a[1][0]的值是___4_____。
20. 数学公式222a b +写成C++表达式:__(a*a+b*b )/2_____。
21. 在C++语言中常使用的循环语句有__for while do ……while____三种。
22. 已知int i; 现要声明一个整型指针p,且初始化为指向变量i, 声明语句应为_int *p=&i _。
23. 有数组:char array[]="China";则数组array 所占的存储空间为__6___字节。
24.设X 为整型变量,能正确表达数学关系c ab 234-的C ++表达式是b*b*b-4*a*a*sqrt(c) 。
25.假定p 所指对象的值为25,p+1所指对象的值为42,若x=*p++;则x 的值为__25______。
26.已知int a[]={7,8,1,4,5},*p=a;则数组元素a[0]的值是 7 ,*(p+2)的值是 1 。
27.函数重载是指同一个函数名可以对应着多个函数的实现。
这些函数的名字和功能相同,只是参数的 类型 和参数的 个数 不同。
28.C++空白符包括 空格 、 回车 和 tab 制表符 。
30.设x,y 为整型变量,能正确表达数学关系y=2x 2+8x+10的C++表达式是 y=2*x*x+8*x+10 。
31.设X为整型变量,能正确表达数学关系yx 11111+++的C++逻辑表达式是1/(1+1/(1+1/(x+y))) 。
32.数组元素a[i]是数组a中的第i+1 个元素。
33.已知int a[3][3] = {{1,2,3},{4,5,6},{7,8,9}},则数组元素a[2][1]的值是8 。
34.在使用while之前一定要对循环变量进行初始化。
三、程序填空1.下列程序根据输入年份,判断该年是否闰年。
请完成程序。
注意:闰年的判定条件是:年号能被4整除但是不能被100整除,或者能被400整除。
#include<iostream>using namespace std;void main(){int year,leap;cin>>year;if(year%4!=0)leap=0;elseif( ①)leap=1;elseif(②)leap=0;elseleap=1;if(leap)cout<<year<<"is a leap year."<<endl;elsecout<<year<<"is not a leap year."<<endl;}2.下列程序计算1000以内能被3整除的自然数之和。
请完成下列程序。
#include<iostream>using namespace std;void main(){int x=1,sum;③;while(true){if( ④) break;if( ⑤) sum+=x;x++;}cout<<sum<<endl;}3.下面程序的功能是统计正整数的各位数字零的个数,并求各位数字中的最大数。
完成下面的程序填空。
#include<iostream>using namespace std;int main(){int n, count, max, t;count=max=0;cin>>n;do{ t=_____④______;if(t= = 0)++count;else if(max<t)____⑤____;n/=10;} while(n);cout<<”count=”<<count<<”max=”<<max;return 0;}4.实现功能:使一个字符串按逆序输出。
#include<iostream>#include<cstring>using namespace std;void inverse (char str[]){char m;int i,j;for (i=0,j=strlen(str);i< ①;i++, ②){m=str[i];str[i]= ③;str[j-1]=m;}for(i=0;i<strlen(str);i++)cout<<str[i];}int main(){char a[10]="english";inverse (a);return 0;}5.下面的函数返回数组中最大元素的下标,数组中元素个数为t,将程序补充完整.int findmax(int s[],int t){int k,p;for(p=0,k=p;p<t;p++)if(s[p]>s[k]) ⑤ ;return k;}6.下面程序的功能是:从键盘上输入若干个学生的成绩,统计并输出最高和最低成绩,当输入负数时结束输入,填充程序。
#include<iostream>using namespace std;int main(){float score, amax, amin;_______③______;amax=score; amin=score;while(_____④________){if(x>amax)amax=x;if(x<amin)amin=x;___⑤_______}cout<<”amax is: ”<<amax<<andl;cout<<”amin is: ”<<amin;return 0;}四、阅读程序1.1.#include<iostream>using namespace std;void main(){int a=1,b=2,x,y;cout<<a++ + ++b<<endl;cout<<a%b<<endl;x=!a>b;y=x--&&b;cout<<x<<endl;cout<<y<<endl;}2.#include<iostream>using namespace std;int sum(int x,int y=7,int z=3);int main(){cout<<sum(5)<<endl;cout<<sum(5,10)<<endl;cout<<sum(5,10,12)<<endl;return 0;}int sum(int x,int y,int z){x++;y++;return x+y+z;}3.#include<iostream>using namespace std;int main(){int a,b,c;cout<<"请输入三个整数:";cin>>a>>b>>c; //设输入的数据是6 3 9if(a>=b>=c)cout<<"三个数中的最大数为:"<<a<<endl;return 0;}4.#include<iostream>using namespace std;int main(){char ch[7]={"12ab56"};int i,s=0;for(i=0;ch[i]>='0'&&ch[i]<='9';i=i+2)s=10*s+ch[i]-'0';cout<< "s="<<s<<endl;return 0;}5.#include<iostream>#include<iomanip>using namespace std;int main(){int j;int n[4][3]={1,4,7,2,8,6,5,7};for(j=0;j<3;j++)cout<<n[3-j][j]<<endl;return 0;}6.#include<iostream>#include<iomanip>using namespace std;int main(){int x=1,y=0;switch(x){case 1:switch(y){case 0: cout<<"输出0"<<endl; break;case 1: cout<<"输出1"<<endl; break;}case 2: cout<<"输出2"<<endl; break;}return 0;}7.#include<iostream>using namespace std;int main(){int i,r;char s1[80]="bus",s2[80]="book";for(i=r=0;s1[i]!='\0' && s2[i]!='\0';i++)if (s1[i]==s2[i])i++;else{r=s1[i]-s2[i];break;}cout<<r<<endl;return 0;}8.# include <iostream>using namespace std;int age ( int n){ int f;if ( n = = 1) f = 10;else f = age (n-1) +2;return f;}void main (){cout << “age:”<<age (5)<<endl;}9.#include <iostream >using namespace std;int main(){int i,s=0;for(i=0;i<5;i++)switch(i){case 0:s+=i;break;case 1:s+=i;break;case 2:s+=i;break;default:s+=2;}cout<<"s="<<s<<endl;return 0;}10.#include<iostream>using namespace std;int main(){int x,y,z,f;x=y=z=1;f=--x||y--&&z++;cout<<"x="<<x<<endl;cout<<"y="<<y<<endl;cout<<"z="<<z<<endl;cout<<"f="<<f<<endl;return 0;}11. 下列程序的运行结果是#include <iostream>using namespace std;void main(){cout<<"hello"<< endl<<"Jack"<< …\n‟;cout<<"how are you!"<<endl;}12.#include <iostream>using namespace std;int main(){ int i=0,j=5;do{ i++; j--;if(i>3)break;}while(j>0);cout<<"i="<<i<<'\t'<<"j="<<j<<endl;}13.#include <iostream>using namespace std;int i=3;int main(){int i=1;int fun1(int);int fun2(int);cout<<i;fun1(i);fun2(i);return 0;}int fun1(int n){cout<<i+n<<endl;return 0;}int fun2(int n){static int i=2;cout<<i+n<<endl;return 0;}14.#include<iostream>using namespace std;void main(){int i,j;for(i=1,j=5;i<j;i++)j- -;cout<<i<<'\t'<<j<<endl;15.#include<iostream>using namespace std;func(int a, int b){ static int m=0, I=2;I+=m+1; m=I+a+b; return (m);}void main( ){ int k=4, m=1,p;p=func(k,m); cout<<p<<”,”;p=func(k,m); cout<<p<<endl;}16.#include<iostream>#include<iomanip>using namespace std;int main(){int j;int n[4][3]={1,4,7,2,8,6,5,7};for(j=0;j<3;j++)cout<<n[3-j][j]<<endl;return 0;}五.编程题1.如果一个整数恰好等于它的所有因子之和,则这个数称为完数。