
实验二 控制系统的数学模型、转换及连续系统的数字仿真
1、实验目的与基本要求
(1)利用MA TLAB 描述控制系统的各种数学模型; (2)利用MA TLAB 实现系统数学模型间的相互转换;
(3)利用MA TLAB 实现控制系统的串联、并联和反馈连接。 (4)掌握面向系统微分方程的连续系统的数字仿真方法及程序; (5)掌握面向系统结构图的连续系统的数字仿真方法及程序; (6)连续系统的快速仿真。 2、实验环境
(1) 微机一台
(2) MATLAB6.5或者MATLAB7软件
3、实验内容
1、MA TLAB 描述控制系统的各种数学模型 例1 若给定系统的传递函数为
将其用MATLAB 语句表示。 num=4*conv([1,2],[1,6,6])
den=conv([1,0],conv([1,1],conv([1,1],conv([1,1],[1,3,2,5])))) printsys(num,den)
num/den =
4 s^3 + 32 s^2 + 72 s + 48
----------------------------------------------------- s^7 + 6 s^6 + 14 s^5 + 21 s^4 + 24 s^3 + 17 s^2 + 5 s
例2 设系统的状态空间表达式为 将其用MATLAB 语句表示。
>> a=[0 0 1;-3/2 -2 -1/2;-3 0 -4];b=[1 1;-1 -1;-1 -3];c=[1 0 0;0 1 0]; >> a=[0 0 1;-3/2 -2 -1/2;-3 0 -4],b=[1 1;-1 -1;-1 -3],c=[1 0 0;0 1 0],d=zeros(2,2)
)
523()1()
66)(2(4)(2332+++++++=
s s s s s s s s s G ???
????????
????=????
??????----+??????????-----=)(01000
1)()(311111
)(4032/122/3100)(t x t y t u t x t x
a =
0 0 1.0000
-1.5000 -2.0000 -0.5000
-3.0000 0 -4.0000
b =
1 1
-1 -1
-1 -3
c =
1 0 0
0 1 0
d =
0 0
0 0
>>
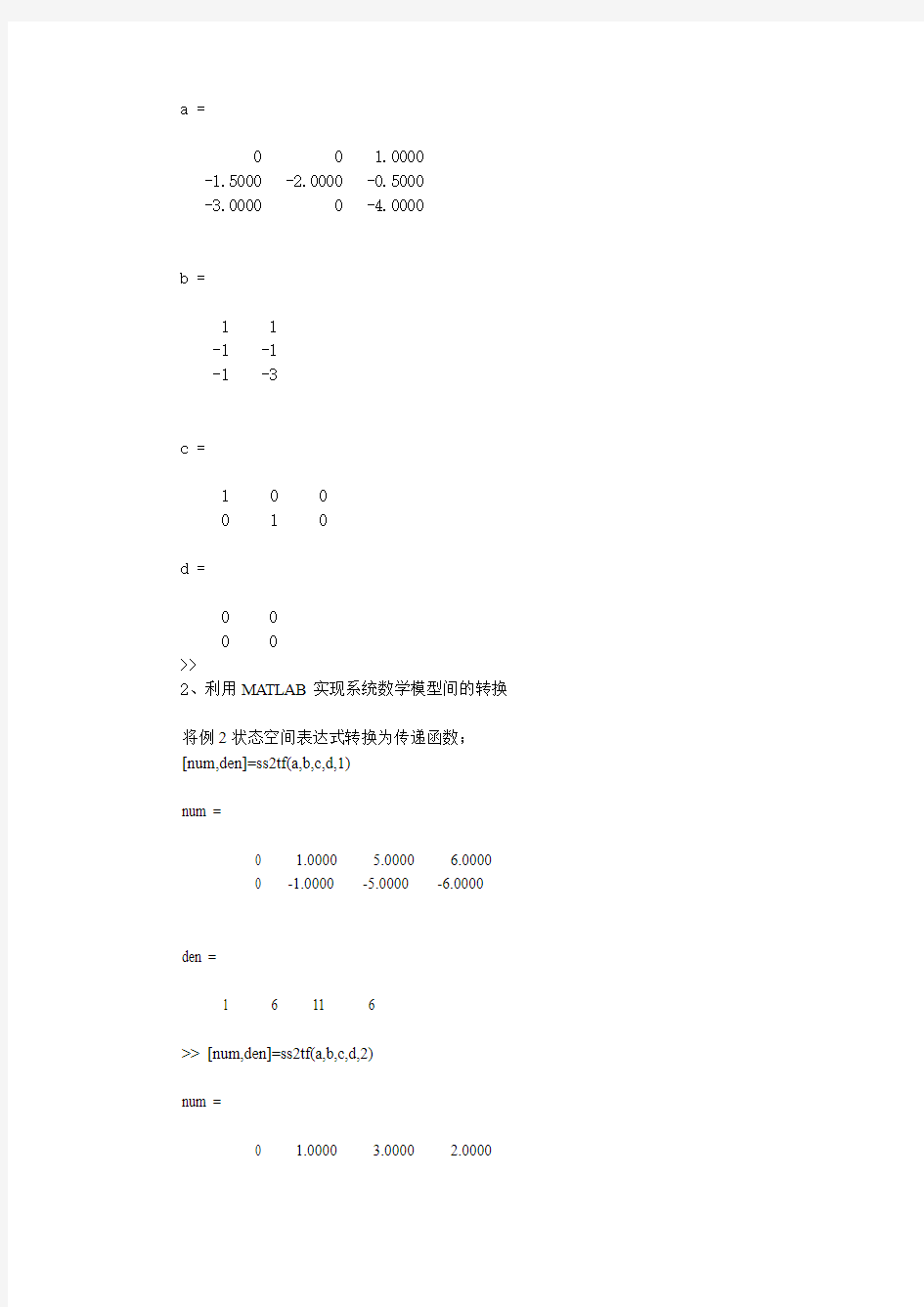
2、利用MATLAB实现系统数学模型间的转换
将例2状态空间表达式转换为传递函数;[num,den]=ss2tf(a,b,c,d,1)
num =
0 1.0000 5.0000 6.0000
0 -1.0000 -5.0000 -6.0000 den =
1 6 11 6
>> [num,den]=ss2tf(a,b,c,d,2)
num =
0 1.0000 3.0000 2.0000
0 -1.0000 -4.0000 -3.0000
den =
1 6 11 6
3、利用MATLAB实现控制系统的串联、并联和反馈连接
图2-7
已知系统的方框图如图2-7所示,求系统的传递函数。
num1=[1];den1=[2 0.5];num2=[10];den2=[1 1];num3=[0.1];den3=[1];num4=[540];den4=[1];num5=[1];den5=[1];
>> [n1,d1]=series(num2,den2,num1,den1);[n2,d2]=feedback(n1,d1,num3,den3);
>> [n3,d3]=series(num4,den4,n2,d2);[n4,d4]=feedback(n3,d3,num5,den5);
>> printsys(n4,d4)
num/den =
5400
----------------------
2 s^2 + 2.5 s + 5401.5
例3假设单变量系统如教材图3-5所示。
试根据四阶龙格库塔法,熟悉MATLAB仿真程序,求输出量y的动态响应曲线。
r=2;num=8;den=[1 3 0];num2=[1];den2=[1];
[no,do]=feedback(num,den,num2,den2);
[a,b,c,d]=tf2ss(no,do);
tf=input('仿真时间tf: ');h=input('计算步长h: ');
x=zeros(length(a),1);y=0;t=0;
for i=1:tf/h
k1=a*x+b*r;
k2=a*(x+h*k1/2)+b*r;
k3=a*(x+h*k2/2)+b*r;
k4=a*(x+h*k3/2)+b*r;
x=x+h*(k1+2*k2+2*k3+k4)/6;
y=[y;c*x];
t=[t;t(i)+h];
end
plot(t,y)
00.51 1.52 2.53 3.54 4.55
0.5
1
1.5
2
2.5
例4 假设某一系统由四个典型环节组成,如图3-11所示。
1、给出典型环节的参数矩阵P
2、给出连接矩阵W 、W 0和W c ;
3、熟悉 MATLAB 仿真程序,求输出量y 的动态响应曲线。 %ex3_2.m r=10;
p=[0.1 1 0.5 1;0 1 1 0;2 1 2 0;10 1 10 0]; W=[0 0 0 -1;1 0 0 0;0 1 0 0;0 0 1 0]; W0=[1;0;0;0];Wc=[0 0 0 1];
Tf=input('仿真时间Tf = ');h=input('计算步长h = ');
A1=diag(p(:,1));B1=diag(p(:,2));C1=diag(p(:,3));D1=diag(p(:,4)); H=B1-D1*W;Q=C1*W-A1; A=inv(H)*Q;B=inv(H)*C1*W0;
x=[zeros(length(A),1)];y=[zeros(length(Wc(:,1)),1)]; t=0;
for i = 1:Tf/h
K1=A*x+B*r;
K2=A*(x+h*K1/2) + B*r; K3=A*(x+h*K2/2) + B*r;
r
图3-11
Ⅰ
Ⅱ
Ⅲ
Ⅳ
K4=A*(x+h*K3) + B*r;
x=x+h*(K1+2*K2+2*K3+K4)/6;
y=[y,Wc*x];t=[t,t(i)+h];
end
plot(t,y)
现代工程控制理论 实验报告 实验名称:控制系统数字仿真技术 实验时间: 2015/5/3 目录 一、实验目的 (2) 二、实验容 (3)
三、实验原理 (3) 四、实验方案 (6) 1、分别离散法; (6) 2、整体离散法; (7) 3、欧拉法 (9) 4、梯形法 (9) 5、龙格——库塔法 (10) 五、实验结论 (11) 小结: (14) 一、实验目的 1、探究多阶系统状态空间方程的求解; 2、探究多种控制系统数字仿真方法并对之进行精度比较;
二、 实验容 1、 对上面的系统进行仿真,运用分别离散法进行分析; 2、 对上面的系统进行仿真,运用整体离散法进行分析; 3、 对上面的系统进行仿真,运用欧拉法进行分析; 4、 对上面的系统进行仿真,运用梯形法进行分析; 5、 对上面的系统进行仿真,运用龙泽——库塔法进行分 析; 6、 对上面的几种方法进行总计比较,对他们的控制精度分 别进行分析比较; 三、 实验原理 1、 控制系统状态空间方程整体离散法的求解; 控制系统的传递函数一般为 x Ax Bu Y Cx Du ? =+=+ 有两种控制框图简化形式如下: KI 控制器可以用框图表示如下:
惯性环节表示如下: 高阶系统(s)(1)n K G T = +的框图如下 对于上面的框图可以简写传递函数 x Ax Bu Y Cx Du ? =+=+ 根据各环节间的关系可以列写出式子中出现的系数A 、B 、C 和D ,下面进行整体离散法求传递函数的推导
00 ()0 ...*()...()(t)(0)...*(t)(0)(t)(0)()(0)At At At At At t t At t t A AT t AT A At t t At At A At A t x Ax Bu e e x e Ax e Bu d e x dt Bue dt dt e x Bue dt e x x Bue d e x x e e Bue d x x e Bue d t KT x kT x e τ ττ τττττ ? -? -----------=+=+=?=?=+=+?=+==????? ?①①得②③ ③得令()0 (1)(1)[(1)]0 (1)[(1)]0 ...(1)[(1)](0)...*(1)()(1)T (1)()()() ,kT A kT A kT k T A k T A k T AT k T AT A k T kT T T AT At AT At AT Bue d t K T x k T x e Bue d e x k e x k Bue d k t x k e x k e Budt e x k e Bdt u k e ττττττ τ?-+?++-++-+=++=+-+-=+-=+=+=+?Φ=? ? ? ??④ 令⑤ ⑤④得令令0 (1)()(1) T At m m e Bdt x k x k x k Φ=+=Φ?+Φ?+?得 这样,如果知道系数,就可以知道高阶系统的传递函数和状态空间方程。 2、 在控制系统的每一个环节都加一个采样开关,构成分别 离散法求解系统的状态空间方程; 采样开关其实是一个零阶保持器
实验三 采样控制系统的数字仿真 一、实验目的 1. 熟悉采样控制系统的仿真方式; 2. 掌握采样控制系统数字仿真的程序实现。 二、实验内容 某工业系统的开环传递函数为 10()(5)G s s s = +,要求用数字控制器D(z)来改善系统的性能,使得相角裕度大于45o ,调节时间小于1s(2%准则)。 1. 绘制碾磨控制系统开环根轨迹图、Bode 图和奈奎斯特图,并判断稳定性; sisotool(G) //点击“Analysis ”下的“Closed-Loop Bode ”,出现LTI Viewer for SISO Design tool margin(G) //点击图标“Data Cursor ”,点击交叉点,出现相关参数。 2. 当控制器为()()() c K s a G s s b +=+,试设计一个能满足要求的控制器(要求用根轨迹法和频率响应法进行设计); 调节前: Gs=tf(10,[1 5 0]); Close_S=feedback(Gs,1); Step(Close_S,'b'); hold on 设计前截止频率为1.88rad/s,相角裕度为69.5°(第一问中) (1)进行根轨迹校正:
1,2=70=0.84.42.55/.25/5 3.75 s n n n n arctg t w rad s w rad s w p w jw j γγξξξ====-±=-±取度 由,求得=5,取=6要求的主导极点为 要使得根轨迹向左转,要加入零点。考虑到校正装置的物理可实现性,加入超前校正装 置。 111111111a ()b (a) ()(2)(b) ,a 2b 1804050c g o o o o o o c s G s s K s G s s s s p p p p p p p p p ?+= ++=++∠∠∠∠=-∠∠∠∠==K () () 开环传递函数为为了使得根轨迹通过根据相角条件 (-)-(-0)-(-)-(-)求得 (-0)=140,(-2)=90(-a )-(-b )超前装置提供的超前相角为 a=6.512,b=11.499(a 表示零点,b 表示极点) 111111115 3.7516.51210+511.499 0+511.499 1006.512=10 g g p j p K p p p p p p K p K =-++=++++=≈+根据根轨迹的幅值条件 系统的开环增益为 333 6.512()11.499 6.5126.499 c c c s G s s z p p z p += +==-10() 所以() 加校正装置后,除要求的主导极点,还有一个闭环零点和一个非主导极点。 根据(-5+j3.75)+(-5-j3.75)+=0+(-5)+(-11.499)-第八法则 、对系统的影响,例如超调量可能会变大等,但闭环系统的性 能主要由复数极点确定。
实验一 MATLAB 及仿真实验(控制系统的时域分析) 一、实验目的 学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点 1、 系统的典型响应有哪些? 2、 如何判断系统稳定性? 3、 系统的动态性能指标有哪些? 三、实验方法 (一) 四种典型响应 1、 阶跃响应: 阶跃响应常用格式: 1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。 2、),(Tn sys step ;表示时间范围0---Tn 。 3、),(T sys step ;表示时间范围向量T 指定。 4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。 2、 脉冲响应: 脉冲函数在数学上的精确定义:0 ,0)(1)(0 ?==?∞ t x f dx x f 其拉氏变换为:) ()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。 脉冲响应函数常用格式: ① )(sys impulse ; ② ); ,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y = (二) 分析系统稳定性 有以下三种方法: 1、 利用pzmap 绘制连续系统的零极点图; 2、 利用tf2zp 求出系统零极点; 3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析 Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.
《控制系统仿真与CAD》 实验课程报告
一、实验教学目标与基本要求 上机实验是本课程重要的实践教学环节。实验的目的不仅仅是验证理论知识,更重要的是通过上机加强学生的实验手段与实践技能,掌握应用 MATLAB/Simulink 求解控制问题的方法,培养学生分析问题、解决问题、应用知识的能力和创新精神,全面提高学生的综合素质。 通过对MATLAB/Simulink进行求解,基本掌握常见控制问题的求解方法与命令调用,更深入地认识和了解MATLAB语言的强大的计算功能与其在控制领域的应用优势。 上机实验最终以书面报告的形式提交,作为期末成绩的考核内容。 二、题目及解答 第一部分:MATLAB 必备基础知识、控制系统模型与转换、线性控制系统的计算机辅助分析 1. >>f=inline('[-x(2)-x(3);x(1)+a*x(2);b+(x(1)-c)*x(3)]','t','x','flag','a','b','c');[t,x]=ode45( f,[0,100],[0;0;0],[],0.2,0.2,5.7);plot3(x(:,1),x(:,2),x(:,3)),grid,figure,plot(x(:,1),x(:,2)), grid
2. >>y=@(x)x(1)^2-2*x(1)+x(2);ff=optimset;https://www.doczj.com/doc/2f7707781.html,rgeScale='off';ff.TolFun=1e-30;ff.Tol X=1e-15;ff.TolCon=1e-20;x0=[1;1;1];xm=[0;0;0];xM=[];A=[];B=[];Aeq=[];Beq=[];[ x,f,c,d]=fmincon(y,x0,A,B,Aeq,Beq,xm,xM,@wzhfc1,ff) Warning: Options LargeScale = 'off' and Algorithm = 'trust-region-reflective' conflict. Ignoring Algorithm and running active-set algorithm. To run trust-region-reflective, set LargeScale = 'on'. To run active-set without this warning, use Algorithm = 'active-set'. > In fmincon at 456 Local minimum possible. Constraints satisfied. fmincon stopped because the size of the current search direction is less than twice the selected value of the step size tolerance and constraints are satisfied to within the selected value of the constraint tolerance.
控制系统数字仿真题库 填空题 1.定义一个系统时,首先要确定系统的;边界确定了系统的范围,边界以外对系统的作用称为系统的,系统对边界以外环境的作用称为系统的。 1.定义一个系统时,首先要确定系统的边界;边界确定了系统的范围,边界以外对系统的作用称为系统的输入,系统对边界以外环境的作用称为系统的输出。 2.系统的三大要素为:、和。 2.系统的三大要素为:实体、属性和活动。 3.人们描述系统的常见术语为:、、和 3.人们描述系统的常见术语为:实体、属性、事件和活动。 4.人们经常把系统分成四类,分别为:、、和 4.人们经常把系统分成四类,它们分别为:连续系统、离散系统、采样数据系统和离散-连续系统。 5、根据系统的属性可以将系统分成两大类:和。 5、根据系统的属性可以将系统分成两大类:工程系统和非工程系统。 6.根据描述方法不同,离散系统可以分为: 和。 6.根据描述方法不同,离散系统可以分为:离散时间系统和离散事件系统。 7. 系统是指相互联系又相互作用的的有机组合。 7. 系统是指相互联系又相互作用的实体的有机组合。 8.根据模型的表达形式,模型可以分为和数学模型二大类,期中数学模型根据数学表达形式的不同可分为二种,分别为:和。8.根据模型的表达形式,模型可以分为物理模型和数学模型二大类,期中数学模型根据数学表达形式的不同可分为二种,分别为:静态模型和动态模型。 9.连续时间集中参数模型的常见形式为有三种,分别为:、和。 9.连续时间集中参数模型的常见形式为有三种,分别为:微分方程、状态方程和传递函数。 10、采用一定比例按照真实系统的样子制作的模型称为,用数学表达式来描述系 统内在规律的模型称为。 10、采用一定比例按照真实系统的样子制作的模型称为物理模型,用数学表达式来描述系统 内在规律的模型称为数学模型。 11.静态模型的数学表达形式一般是方程和逻辑关系表达式等,而动态模型的数学表达形式一般是方程和方程。 11.静态模型的数学表达形式一般是代数方程和逻辑关系表达式等,而动态模型的数
实验四:控制系统的时域分析 一,实验目的 1、使用MATLAB 分析系统的稳定性及稳态性能。 2、分析系统的暂态性能并会计算暂态性能指标。 二、实验内容 1、已知系统的闭环传递函数为:384 40014020200)(234++++=S S G S S S ,分析系统的稳定性,并求该系统的单位阶跃响应曲线。 >> num=[200]; >> den=[1 20 140 400 384]; >> [z,p]=tf2zp(num ,den); >> ii=find(real(p)>0);n1=length(ii); >> if(n1>0) disp('The Unstable Poles are:'); disp(p(ii)); else disp('System is Stable');end System is Stable >>step(num,den) 2、已知离散系统5.08.06.1)(22+--=Z Z Z Z Z φ,求该系统的单位阶跃响应曲线。 >> num=[1.6 -1 0]; >> den=[1 -0.8 0.5]; >> dstep(num,den);
3、控制系统的状态空间模型为: ?????? ????????.3.2.1x x x =??????????--17120100010??????????x x x 321+u ??????????100 []???? ??????=x x x y 321132,求该系统在[0,3]区间上的单位脉冲响应曲线。 >> A=[0 1 0;0 0 1;0 -12 -17];B=[0;0;1];C=[2 3 1];D=0; >> impulse(A,B,C,D) 4、已知控制系统模型为:u x x x x ??????+????????????--=????????? ?10961021.2. 1,[]??????=x x y 2111,求系统在y=sint 时的响应。 >> [u,t]=gensig('sin(t)',2*pi); >> A=[0 1;-6 -9];B=[0;1];C=[1 1];D=0;
实验二 最少拍控制系统仿真 一、 实验目的 1. 学习最少拍系统的设计方法和使用Matlab 进行仿真的方法 二、 实验器材 x86系列兼容型计算机,Matlab 软件 三、 实验原理 建立所示的数字系统控制模型并进行系统仿真,已知)1(10)(+= s s s G P ,采样周期T=1s 。 广义被控对象脉冲传递函数: [])3679.01)(1()718.01(679.3)1(1)()(1111-------+=??????+?-==z z z z s s K s e Z s G Z z G Ts ,则G(z)的零点为-0.718(单位圆内)、极点为1(单位圆上)、0.368(单位圆内),故u=0,v=1,m=1。 a. 有纹波系统 单位阶跃信号:根据稳定性要求,G(z)中z=1的极点应包含在Φe (z)的零点中,系统针对阶跃输入进行设计,q=1,显然准确性条件中已满足了稳定性要求,于是可设01)(?-=Φz z ,根据1)1(=Φ求得10=?,则1)(-=Φz z , 11718.01)3679.01(2717.0)(1)()(1)(--+-=Φ-Φ=z z z z z G z D 。 单位斜披信号:根据稳定性要求,G(z)中z=1的极点应包含在Φe (z)的零点中,系统针对阶跃输入进行设计,q=2,显然准确性条件中已满足了稳定性要求,于是可设)()(1101--+=Φz z z ??,根据1)1(=Φ,0)1('=Φ求得20=?,11-=?,则 2 12)(---=Φz z z ,)718.01)(1()5.01)(3679.01(5434.0)(1)()(1)(1111----+---=Φ-Φ=z z z z z z z G z D 。 单位加速度信号:根据稳定性要求,G(z)中z=1的极点应包含在Φe (z)的零点中,系统
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
控制系统数字仿真 题型举例与总复习 一、填空题 A类基本概念题型 1、系统是指相互联系又相互作用的实体的有机组合。 2、定义一个系统时,首先要确定系统的边界;边界确定了系统的范围,边界以外对系统的作用称为系统的输入,系统对边界以为环境的作用称为系统的输出。 3、系统的三大要素为:实体、属性和活动。 4、根据系统的属性可以将系统分成两大类:工程系统和非工程系统。 5、相似原理用于仿真时,对仿真建模方法的三个基本要求是稳定性、准确性和快速性。 6、根据模型种类不同,系统仿真可分为三种:物理仿真、数字仿真和半实物仿真。 7、按照系统模型特征分类,仿真可分为连续系统仿真及离散事件系统仿真两大类。 8、采用一定比例按照真实系统的样子制作的模型称为物理模型,用数学表达式来描述系统内在规律的模型称为数学模型。 9、计算机仿真是指将模型在计算机上进行试验的过程。 10、系统仿真的三个基本活动是系统建模、仿真建模和仿真试验,计算机仿真的三个要素为:系统、模型与计算机。 11、如果某数值计算方法的计算结果对初值误差和计算误差不敏感,则称该计算方法是稳定的。 12、数值积分法步长的选择应遵循的原则为计算稳定性及计算精度。 13、采样数值积分方法时有两种计算误差,分别为截断误差和舍入误差。 14、三阶隐式啊达姆氏算法的截断误差为O(?4),二阶龙格-库塔法的局部截断误差为O(?3),四阶龙格-库塔法的局部截断误差为O(?5)。 15、在判定数值积分方法的稳定域时,使用的测试方程为y?=μy。 16、龙格-库塔法的基本思想是用几个点上函数值的线性组合来避免计算函数的高阶导数,提高数值计算的精度。 17、连续系统仿真中常见的一对矛盾为计算速度和计算精度。 18、离散相似法在采样周期的选择上应当满足采样定理。 19、保持器是一种将离散时间信号恢复成连续信号的装置,零阶保持器能较好地再现阶跃信号,一阶保持器能较好地再现斜坡信号。 20、实际信号重构器不可能无失真地重构信号,具体表现为信号重构器会对被重构的信号产生相位的滞后和幅度的衰减。 21、一般将采样控制系统的仿真归类为连续系统仿真。 22、在控制理论中,由系统传递函数来建立系统状态方程的问题被称为“实现问题”。 23、常用的非线性环节包括:饱和非线性、失灵非线性、迟滞回环非线性。
《MATLAB与控制系统仿真》 实验报告 班级: 学号: 姓名: 时间:2013 年 6 月
目录实验一MATLAB环境的熟悉与基本运算(一)实验二MATLAB环境的熟悉与基本运算(二)实验三MATLAB语言的程序设计 实验四MATLAB的图形绘制 实验五基于SIMULINK的系统仿真 实验六控制系统的频域与时域分析 实验七控制系统PID校正器设计法 实验八线性方程组求解及函数求极值
实验一MATLAB环境的熟悉与基本运算(一) 一、实验目的 1.熟悉MATLAB开发环境 2.掌握矩阵、变量、表达式的各种基本运算 二、实验基本原理 1.熟悉MATLAB环境: MATLAB桌面和命令窗口、命令历史窗口、帮助信息浏览器、工作空间浏览器、文件和搜索路径浏览器。 2.掌握MATLAB常用命令 表1 MATLAB常用命令 变量与运算符 3.1变量命名规则 3.2 MATLAB的各种常用运算符 表3 MATLAB关系运算符 表4 MATLAB逻辑运算符
| Or 逻辑或 ~ Not 逻辑非 Xor逻辑异或 符号功能说明示例符号功能说明示例 :1:1:4;1:2:11 . ;分隔行.. ,分隔列… ()% 注释 [] 构成向量、矩阵!调用操作系统命令 {} 构成单元数组= 用于赋值 的一维、二维数组的寻访 表6 子数组访问与赋值常用的相关指令格式 三、主要仪器设备及耗材 计算机 四.实验程序及结果 1、新建一个文件夹(自己的名字命名,在机器的最后一个盘符) 2、启动MATLAB,将该文件夹添加到MATLAB路径管理器中。 3、学习使用help命令。
实验四 基于Simulink 控制系统仿真与综合设计 4.1实验目的 1)熟悉Simulink 的工作环境及其功能模块库; 2)掌握Simulink 的系统建模和仿真方法; 3)掌握Simulink 仿真数据的输出方法与数据处理; 4)掌握利用Simulink 进行控制系统的时域仿真分析与综合设计方法; 5)掌握利用 Simulink 对控制系统的时域与频域性能指标分析方法。 4.2实验内容与要求 4.2.1 实验内容 图4.1为单位负反馈系统。分别求出当输入信号为阶跃函数信号)(1)(t t r =、斜坡函数信号t t r =)(和抛物线函数信号2/)(2t t r =时,系统输出响应)(t y 及误差信号)(t e 曲线。若要求系统动态性能指标满足如下条件:a) 动态过程响应时间s t s 5.2≤;b) 动态过程响应上升时间s t p 1≤;c) 系统最大超调量%10≤p σ。按图4.2所示系统设计PID 调节器参数。 图4.1 单位反馈控制系统框图
s 119.010+s 1 007.01+s + - )(t r ) (t y ) (t e PID 图4.2 综合设计控制系统框图 4.2.2 实验要求 1) 采用Simulink 系统建模与系统仿真方法,完成仿真实验; 2) 利用Simulink 中的Scope 模块观察仿真结果,并从中分析系统 时域性能指标(系统阶跃响应过渡过程时间,系统响应上升时间,系统响应振荡次数,系统最大超调量和系统稳态误差); 3) 利用Simulink 中Signal Constraint 模块对图4.2系统的PID 参 数进行综合设计,以确定其参数; 4) 对系统综合设计前后的主要性能指标进行对比分析,并给出PID 参数的改变对闭环系统性能指标的影响。 4.3确定仿真模型 在Simulink 仿真环境中,打开simulink 库,找出相应的单元部件模型,并拖至打开的模型窗口中,构造自己需要的仿真模型。如图所示:
《控制系统计算机仿真—课程设计作业》 姓名: 专业: 学号: 1. 构造矩阵 (1)试将.*A B 与B A *的 结果相加,并找出相加后新矩阵中绝对值大于10的元素。 (2)组合成一个43的矩阵,第一列为按列顺序排列的A 矩阵元素,第二列为按列顺序排列的B 矩阵元素,第三列为按列顺序排列的C 矩 阵元素。 (1)matlab : A=[-7 1;8 -3]; B=[4 2;5 7]; C=[5 9;6 2]; D=A.*B+A*B num=find(abs(D)>10); D(num) 结果:D = -51 -5 57 -26 ans = -51 57 -26 (2)matlab :NEW=[A(1,:),A(2,:);B(1,:),B(2,:);C(1,:),C(2,:)]’ 结果:NEW = -7 4 5 1 2 9 8 5 6 714259,,835762A B C -??????===??????-??????
-3 7 2 2. 绘制函数曲线,要求写出程序代码 (1)在区间[0,2]π均匀的取50个点,构成向量X。 (2)在同一窗口绘制曲线y1=sin(2*t-0.3); y2=3cos(t+0.5);要求y1曲线为红色点划线,标记点为圆圈;y2为蓝色虚线,标记点为星号。 程序代码: t=linspace(0,2*pi,50); y1=sin(2*t-0.3); y2=3*cos(t+0.5); plot(t,y1,'r.',t,y2,'b-'); hold on plot(t,y1,'o',t,y2,'*'); hold off 3. 写出生成下图所示波形的MA TLAB 程序。图中三个波形均为余弦波,x范围为[pi/2 ~ 7*pi/2] 。要求它的正半波被置零;且在 24 [,] 33 ππ 和 810 [,] 33 ππ 处被削顶。 程序:x=linspace(pi/2,7*pi/2,100); y1=cos(x); figure(1) plot(x,y1) y1(find(y1>0))=0; figure(2) plot(x,y1) n=find((x>2*pi/3&x<4*pi/3)|(x>8*pi/3&x<10*pi/3)); y1(n)=cos(2*pi/3); figure(3) plot(x,y1) 4对于x=[-2π,2π],y1=sinx、y2=cosx、y3=sin2x、y4=cos2x ①用MATLAB语言分四个区域分别绘制的曲线,并且对图形标题及横纵坐标轴进行标注。 ②另建一个窗口,不分区,用不同颜色、线型绘出四条曲线,并标注图例注解。Matlab:x=linspace(-2*pi,2*pi,1000); y1=sin(x);
《控制系统数字仿真》课程 大作业 姓名: 学号: 班级: 日期: 同组人员:
目录 一、引言 (2) 二、设计方法 (2) 1、系统数学模型 (2) 2、系统性能指标 (4) 2.1 绘制系统阶跃响应曲线、根轨迹图、频率特性 (4) 2.2 稳定性分析 (6) 2.3 性能指标分析 (6) 3、控制器设计 (6) 三、深入探讨 (9) 1、比例-微分控制器(PD) (9) 2、比例-积分控制(PI) (12) 3、比例-微分-积分控制器(PID) (14) 四、设计总结 (17) 五、心得体会 (18) 六、参考文献 (18)
一、引言 MATLAB语言是当今国际控制界最为流行的控制系统计算机辅助设计语言,它的出现为控制系统的计算机辅助分析和设计带来了全新的手段。其中图形交互式的模型输入计算机仿真环境SIMULINK,为MATLAB应用的进一步推广起到了积极的推动作用。现在,MATLAB语言已经风靡全世界,成为控制系统CAD领域最普及、也是最受欢迎的软件环境。 随着计算机技术的发展和应用,自动控制理论和技术在宇航、机器人控制、导弹制导及核动力等高新技术领域中的应用也愈来愈深入广泛。不仅如此,自动控制技术的应用范围现在已发展到生物、医学、环境、经济管理和其它许多社会领域中,成为现代社会生活中不可或缺的一部分。随着时代进步和人们生活水平的提高,在人类探知未来,认识和改造自然,建设高度文明和发达社会的活动中,控制理论和技术必将进一步发挥更加重要的作用。作为一个自动化专业的学生,了解和掌握自动控制的有关知识是十分必要的。 利用MATLAB软件及其SIMULINK仿真工具来实现对自动控制系统建模、分析与设计、仿真,能够直观、快速地分析系统的动态性能和稳态性能,并且能够灵活的改变系统的结构和参数,通过快速、直观的仿真达到系统的优化设计,以满足特定的设计指标。 二、设计方法 1、系统数学模型 美国卡耐尔基-梅隆大学机器人研究所开发研制了一套用于星际探索的系统,其目标机器人是一个六足步行机器人,如图(a)所示。该机器人单足控制系统结构图如图(b)所示。 要求: (1)建立系统数学模型; (2)绘制系统阶跃响应曲线、根轨迹图、频率特性; (3)分析系统的稳定性,及性能指标; (4)设计控制器Gc(s),使系统指标满足:ts<10s,ess=0,,超调量小于5%。
计算机基础理论实验四 简单控制系统python仿真实验 学号:13 姓名: 陈严 实验日期:2012/5/24 实验目的:学习计算机仿真的方法。 实验内容:1.建立test.py文件,运行test.py,分析实验结果; 2.为每一行代码写一个注释 系统如上图,鼓风机吹出风需要经过阀门才能到达风轮;而风轮的转速会影响到杠杆位置间接影响到阀门开度。鼓风机的输入为正作用;风轮以至阀门的影响为负作用(或负反馈)。 代码: #coding=utf-8 #系统参数 a=0.1 b=1.0 #系统结构,F:鼓风机的风力; F1:实际输入风力;W:风轮转速 def WW(): return a*F1 //*每次输入的风力 def FF1(): return F-b*W //*杠杆所得到的力 #初始条件 F1=2 //*实际输入风力为2
W=0.2 //*风轮转速为0.2转每秒 print F1,W //*输入实际风力和转速 #鼓风机风力正常 F=2.2 //*鼓风机的风力为2.2 print "鼓风机风力",F //*输出鼓风机的风力 #随着时间增加 for t in xrange(20): //*返回一个迭代序列 F1,W=FF1(),WW() //*将风力和转速进行更新 print F1,W //*输出更新后的风力和转速#鼓风机风力偏大 F=2.3 //*当鼓风机的风力为2.3时print "鼓风机风力",F #随着时间增加 for t in xrange(20): //*返回迭代列20次 F1,W=FF1(),WW() //*再次更新 print F1,W //*输出实际风力和转速 #鼓风机风力偏小 F=2.2 //*当风力为2.2时 print "鼓风机风力",F #随着时间增加 for t in xrange(20): //*在f=2.2时,再次迭代 F1,W=FF1(),WW() print F1,W 实验结果:
控制系统数字仿真题库 一、填空题 1. 定义一个系统时,首先要确定系统的边界;边界确定了系统的范围,边界以外对系统的作用称为系统的输入,系统对边界以为环境的作用称为系统的输出。 2.系统的三大要素为:实体、属性和活动。 3.人们描述系统的常见术语为:实体、属性、事件和活动。 4.人们经常把系统分成四类,它们分别为:连续系统、离散系统、采样数据系统和离散-连续系统。 5、根据系统的属性可以将系统分成两大类:工程系统和非工程系统。 6.根据描述方法不同,离散系统可以分为:离散时间系统和离散事件系统。 7. 系统是指相互联系又相互作用的实体的有机组合。 8.根据模型的表达形式,模型可以分为物理模型和数学模型二大类,其中数学模型根据数学表达形式的不同可分为二种,分别为:静态模型和动态模型。 9、采用一定比例按照真实系统的样子制作的模型称为物理模型,用数学表达式来描述系统内在规律 的模型称为数学模型。 10.静态模型的数学表达形式一般是代数方程和逻辑关系表达式等,而动态模型的数学表达形式一般是微分方程和差分方程。 11.系统模型根据描述变量的函数关系可以分类为线性模型和非线性模型。 12 仿真模型的校核是指检验数字仿真模型和数学模型是否一致。 13.仿真模型的验证是指检验数字仿真模型和实际系统是否一致。 14.计算机仿真的三个要素为:系统、模型与计算机。 15.系统仿真的三个基本活动是系统建模、仿真建模和仿真试验。 16.系统仿真根据模型种类的不同可分为:物理仿真、数学仿真和数学-物理混合仿真。 17.根据仿真应用目的的不同,人们经常把计算机仿真应用分为四类,分别为: 系统分析、系统设计、理论验证和人员训练。 18.计算机仿真是指将模型在计算机上进行实验的过程。 19. 仿真依据的基本原则是:相似原理。 20. 连续系统仿真中常见的一对矛盾为计算速度和计算精度。 21.保持器是一种将离散时间信号恢复成连续信号的装置。 22.零阶保持器能较好地再现阶跃信号。 23. 一阶保持器能较好地再现斜坡信号。 24. 二阶龙格-库塔法的局部截断误差为O()。 25.三阶隐式阿达姆斯算法的截断误差为:O()。
自动控制理论 上 机 实 验 报 告 学院:机电工程学院 班级:13级电信一班 姓名: 学号:
实验四 PID 控制系统的Simulink 仿真分析 一、实验目的和任务 1.掌握PID 控制规律及控制器实现。 2.掌握用Simulink 建立PID 控制器及构建系统模型与仿真方法。 二、实验原理和方法 在模拟控制系统中,控制器中最常用的控制规律是PID 控制。PID 控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差。PID 控制规律写成传递函数的形式为a s K s Ki K s T s T K s U s E s G d p d i p ++=++==)11()()()( 式中,P K 为比例系数;i K 为积分系数;d K 为微分系数;i p i K K T = 为积分时间常数;p d d K K T =为微分时间常数; 简单来说,PID 控制各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立 即产生控制作用,以减少偏差。 (2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决 于积分时间常数i T ,i T 越大,积分作用越弱,反之则越强。 (3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。 三、实验使用仪器设备 计算机、MATLAB 软件 四、实验内容(步骤) 1、在MATLAB 命令窗口中输入“simulink ”进入仿真界面。 2、构建PID 控制器:(1)新建Simulink 模型窗口(选择“File/New/Model ”),在Simulink Library Browser 中将需要的模块拖动到新建的窗口中,根据PID 控制器的传递函数构建出如下模型:
MATLAB与控制系统仿真及实验 实验报告 (二) 2015- 2016 学年第 2 学期 专业: 班级: 学号: 姓名: 20 年月日
实验二 MATLAB的图形绘制 一、实验目的 1.学习MATLAB图形绘制的基本方法 2.熟悉和了解MATLAB图形绘制程序编辑的基本指令 3.熟悉掌握利用MATLAB图形编辑窗口编辑和修改图形界面,添加图形的标注 4.掌握plot、subplot的指令格式和语法 二、实验设备及条件 计算机一台(包含MATLAB 软件环境)。 三、实验内容 1.生成1×10 维的随机数向量a,分别用红、黄、蓝、绿色绘出其连线图、杆图、阶梯图和条形图,并分别标出标题“连线图”、“杆图”、“阶梯图”、“条形图”。 (1. Generate random vector of dimension 1×10, and use different functions plot, stem, stairs and bars to draw figures with different colors, such as red, yellow, blue and green. Then title the figures with "Plot", "Stem", "Stem", "Bars" respectively.) a=rand(1,10); subplot(2,2,1); plot(a,'r'); title('连线图'); subplot(2,2,2); stem(a,'y'); title('杆图'); subplot(2,2,3); stairs(a,'b'); title('阶梯图'); subplot(2,2,4); bar(a,'g'); title('条形图'); 2. 绘制函数曲线,要求写出程序代码。 (2. Plot the curves and write down the code.) (1) 在区间[0:2π]均匀的取50个点,构成向量t t=linspace(0,2*pi,50)
基于Simulink 控制系统仿真与综合设计 一、实验目的 (1) 熟悉Simulink 的工作环境及其功能模块库; (2) 掌握Simulink 的系统建模和仿真方法; (3) 掌握Simulink 仿真数据的输出方法与数据处理; (4) 掌握利用Simulink 进行控制系统的时域仿真分析与综合设计方法; (5) 掌握利用 Simulink 对控制系统的时域与频域性能指标分析方法。 二、实验内容 图2.1为单位负反馈系统。分别求出当输入信号为阶跃函数信号)(1)(t t r =、斜坡函数信号t t r =)(和抛物线函数信号2/)(2t t r =时,系统输出响应)(t y 及误差信号)(t e 曲线。若要求系统动态性能指标满足如下条件:a) 动态过程响应时间s t s 5.2≤;b) 动态过程响应上升时间s t p 1≤;c) 系统最大超调量%10≤p σ。按图1.2所示系统设计PID 调节器参数。 图2.1 单位反馈控制系统框图
图2.2 综合设计控制系统框图 三、实验要求 (1) 采用Simulink系统建模与系统仿真方法,完成仿真实验; (2) 利用Simulink中的Scope模块观察仿真结果,并从中分析系统时域性能指标(系统阶跃响应过渡过程时间,系统响应上升时间,系统响应振荡次数,系统最大超调量和系统稳态误差); (3) 利用Simulink中Signal Constraint模块对图2.2系统的PID参数进行综合设计,以确定其参数; (4) 对系统综合设计前后的主要性能指标进行对比分析,并给出PID参数的改变对闭环系统性能指标的影响。 四、实验步骤与方法 4.1时域仿真分析实验步骤与方法 在Simulink仿真环境中,打开simulink库,找出相应的单元部件模型,并拖至打开的模型窗口中,构造自己需要的仿真模型。根据图2.1 所示的单位反馈控制系统框图建立其仿真模型,并对各个单元部件模型的参数进行设定。所做出的仿真电路图如图4.1.1所示。
《运动控制系统仿真》实验讲义 谢仕宏
实验一、闭环控制系统及直流双闭环调速系统仿真 一、实验学时:6学时 二、实验内容: 1. 已知控制系统框图如图所示: 图1-1 单闭环系统框图 图中,被控对象s e s s G 150130010)(-+= ,Gc(s)为PID 控制器,试整定PID 控制器参数,并建立控制系统Simulink 仿真模型。再对PID 控制子系统进行封装,要求可通过封装后子系统的参数设置页面对Kp 、Ti 、Td 进行设置。 2. 已知直流电机双闭环调速系统框图如图1-2所示。试设计电流调节器ACR 和转速调节器ASR 并进行Simulink 建模仿真。 图1-2 直流双闭环调速系统框图
三、实验过程: 1、建模过程如下: (1)PID控制器参数整顿 T2.1=,Ti=τ2=300,根据PID参数的工程整定方法(Z-N法),如下表所示, Kp= τK Td=τ5.0=75。 表1-1 Z-N法整定PID参数 (2)simulink仿真模型建立 建立simulink仿真模型如下图1-3所示,并进行参数设置:
图1-3 PID控制系统Simulink仿真模型 图1-3中,step模块“阶跃时间”改为0,Transport Delay模块的“时间延迟”设置为150,仿真时间改为1000s,如下图1-4所示: 图1-3 PID控制参数设置 运行仿真,得如下结果:
图1-5 PID控制运行结果 (3)PID子系统的创建 首先将参数Gain、Gain1、Gain三个模块的参数进行设置,如下图所示: 图1-6 PID参数设置 然后建立PID控制器子系统,如下图1-7所示:
控制系统数字仿.. 交卷时间:2016-04-01 21:13:58 一、单选题 1. (2分) 列出工作内存中的变量名称以及细节,只需在命令窗口输入________。 ? A. what ? B. who ? C. echo on ? D. whose 得分:0知识点:控制系统数字仿真作业题 答案D解析 2. (2分) 在Simulink中,运行系统仿真的工具栏图标为 ? A. ? B. ? C. ? D. 得分:0知识点:控制系统数字仿真作业题 答案C解析 3. (2分) 设A=[0 2 3 4;1 3 5 0],B=[1 0 5 3;1 5 0 5]则A>=B的结果为________。
? A. ? B. ? C. ? D. 得分:0知识点:控制系统数字仿真作业题 答案B解析 4. (2分) 若B=[3 2 7 4 9 6 1 8 0 5],则B([end-3:end])为________。 ? A. 3 7 1 ? B. 3 2 7 4 9 9 4 7 2 3 ? C. 3 4 ? D. 1 8 0 5 得分:0知识点:控制系统数字仿真作业题 答案D解析 5. (2分) 执行以下指令之后E,F的值分别为________。 A=[1 2 3; 4 5 6]; B=[3 4 5; 7 8 9]; C=3; E = A+B; F = B+C ? A. E=[4 5 6;7 8 9] F=[6 7 8;10 11 12] ? B. E=[6 7 8;10 11 12] F=[4 5 6;7 8 9] ? C. E=[4 5 6;7 8 9 F=[6 4 5;10 8 9] ? D. E=[4 5 6;7 8 9] F=[3 4 8;7 8 12]