Image Classification with the Fisher Vector
- 格式:pdf
- 大小:876.71 KB
- 文档页数:24
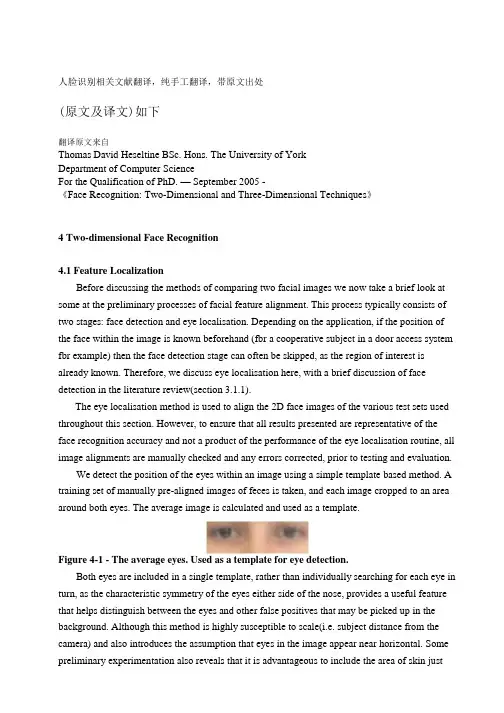
人脸识别相关文献翻译,纯手工翻译,带原文出处(原文及译文)如下翻译原文来自Thomas David Heseltine BSc. Hons. The University of YorkDepartment of Computer ScienceFor the Qualification of PhD. — September 2005 -《Face Recognition: Two-Dimensional and Three-Dimensional Techniques》4 Two-dimensional Face Recognition4.1 Feature LocalizationBefore discussing the methods of comparing two facial images we now take a brief look at some at the preliminary processes of facial feature alignment. This process typically consists of two stages: face detection and eye localisation. Depending on the application, if the position of the face within the image is known beforehand (fbr a cooperative subject in a door access system fbr example) then the face detection stage can often be skipped, as the region of interest is already known. Therefore, we discuss eye localisation here, with a brief discussion of face detection in the literature review(section 3.1.1).The eye localisation method is used to align the 2D face images of the various test sets used throughout this section. However, to ensure that all results presented are representative of the face recognition accuracy and not a product of the performance of the eye localisation routine, all image alignments are manually checked and any errors corrected, prior to testing and evaluation.We detect the position of the eyes within an image using a simple template based method. A training set of manually pre-aligned images of feces is taken, and each image cropped to an area around both eyes. The average image is calculated and used as a template.Figure 4-1 - The average eyes. Used as a template for eye detection.Both eyes are included in a single template, rather than individually searching for each eye in turn, as the characteristic symmetry of the eyes either side of the nose, provides a useful feature that helps distinguish between the eyes and other false positives that may be picked up in the background. Although this method is highly susceptible to scale(i.e. subject distance from the camera) and also introduces the assumption that eyes in the image appear near horizontal. Some preliminary experimentation also reveals that it is advantageous to include the area of skin justbeneath the eyes. The reason being that in some cases the eyebrows can closely match the template, particularly if there are shadows in the eye-sockets, but the area of skin below the eyes helps to distinguish the eyes from eyebrows (the area just below the eyebrows contain eyes, whereas the area below the eyes contains only plain skin).A window is passed over the test images and the absolute difference taken to that of the average eye image shown above. The area of the image with the lowest difference is taken as the region of interest containing the eyes. Applying the same procedure using a smaller template of the individual left and right eyes then refines each eye position.This basic template-based method of eye localisation, although providing fairly preciselocalisations, often fails to locate the eyes completely. However, we are able to improve performance by including a weighting scheme.Eye localisation is performed on the set of training images, which is then separated into two sets: those in which eye detection was successful; and those in which eye detection failed. Taking the set of successful localisations we compute the average distance from the eye template (Figure 4-2 top). Note that the image is quite dark, indicating that the detected eyes correlate closely to the eye template, as we would expect. However, bright points do occur near the whites of the eye, suggesting that this area is often inconsistent, varying greatly from the average eye template.Figure 4-2 一Distance to the eye template for successful detections (top) indicating variance due to noise and failed detections (bottom) showing credible variance due to miss-detected features.In the lower image (Figure 4-2 bottom), we have taken the set of failed localisations(images of the forehead, nose, cheeks, background etc. falsely detected by the localisation routine) and once again computed the average distance from the eye template. The bright pupils surrounded by darker areas indicate that a failed match is often due to the high correlation of the nose and cheekbone regions overwhelming the poorly correlated pupils. Wanting to emphasise the difference of the pupil regions for these failed matches and minimise the variance of the whites of the eyes for successful matches, we divide the lower image values by the upper image to produce a weights vector as shown in Figure 4-3. When applied to the difference image before summing a total error, this weighting scheme provides a much improved detection rate.Figure 4-3 - Eye template weights used to give higher priority to those pixels that best represent the eyes.4.2 The Direct Correlation ApproachWe begin our investigation into face recognition with perhaps the simplest approach,known as the direct correlation method (also referred to as template matching by Brunelli and Poggio [29 ]) involving the direct comparison of pixel intensity values taken from facial images. We use the term "Direct Conelation, to encompass all techniques in which face images are compared directly, without any form of image space analysis, weighting schemes or feature extraction, regardless of the distance metric used. Therefore, we do not infer that Pearson's correlation is applied as the similarity function (although such an approach would obviously come under our definition of direct correlation). We typically use the Euclidean distance as our metric in these investigations (inversely related to Pearson's correlation and can be considered as a scale and translation sensitive form of image correlation), as this persists with the contrast made between image space and subspace approaches in later sections.Firstly, all facial images must be aligned such that the eye centres are located at two specified pixel coordinates and the image cropped to remove any background information. These images are stored as greyscale bitmaps of 65 by 82 pixels and prior to recognition converted into a vector of 5330 elements (each element containing the corresponding pixel intensity value). Each corresponding vector can be thought of as describing a point within a 5330 dimensional image space. This simple principle can easily be extended to much larger images: a 256 by 256 pixel image occupies a single point in 65,536-dimensional image space and again, similar images occupy close points within that space. Likewise, similar faces are located close together within the image space, while dissimilar faces are spaced far apart. Calculating the Euclidean distance d, between two facial image vectors (often referred to as the query image q, and gallery image g), we get an indication of similarity. A threshold is then applied to make the final verification decision.d . q - g ( threshold accept ) (d threshold ⇒ reject ). Equ. 4-14.2.1 Verification TestsThe primary concern in any face recognition system is its ability to correctly verify a claimed identity or determine a person's most likely identity from a set of potential matches in a database. In order to assess a given system's ability to perform these tasks, a variety of evaluation methodologies have arisen. Some of these analysis methods simulate a specific mode of operation (i.e. secure site access or surveillance), while others provide a more mathematicaldescription of data distribution in some classification space. In addition, the results generated from each analysis method may be presented in a variety of formats. Throughout the experimentations in this thesis, we primarily use the verification test as our method of analysis and comparison, although we also use Fisher's Linear Discriminant to analyse individual subspace components in section 7 and the identification test for the final evaluations described in section 8. The verification test measures a system's ability to correctly accept or reject the proposed identity of an individual. At a functional level, this reduces to two images being presented for comparison, fbr which the system must return either an acceptance (the two images are of the same person) or rejection (the two images are of different people). The test is designed to simulate the application area of secure site access. In this scenario, a subject will present some form of identification at a point of entry, perhaps as a swipe card, proximity chip or PIN number. This number is then used to retrieve a stored image from a database of known subjects (often referred to as the target or gallery image) and compared with a live image captured at the point of entry (the query image). Access is then granted depending on the acceptance/rej ection decision.The results of the test are calculated according to how many times the accept/reject decision is made correctly. In order to execute this test we must first define our test set of face images. Although the number of images in the test set does not affect the results produced (as the error rates are specified as percentages of image comparisons), it is important to ensure that the test set is sufficiently large such that statistical anomalies become insignificant (fbr example, a couple of badly aligned images matching well). Also, the type of images (high variation in lighting, partial occlusions etc.) will significantly alter the results of the test. Therefore, in order to compare multiple face recognition systems, they must be applied to the same test set.However, it should also be noted that if the results are to be representative of system performance in a real world situation, then the test data should be captured under precisely the same circumstances as in the application environment.On the other hand, if the purpose of the experimentation is to evaluate and improve a method of face recognition, which may be applied to a range of application environments, then the test data should present the range of difficulties that are to be overcome. This may mean including a greater percentage of6difficult9 images than would be expected in the perceived operating conditions and hence higher error rates in the results produced. Below we provide the algorithm for executing the verification test. The algorithm is applied to a single test set of face images, using a single function call to the face recognition algorithm: CompareF aces(F ace A, FaceB). This call is used to compare two facial images, returning a distance score indicating how dissimilar the two face images are: the lower the score the more similar the two face images. Ideally, images of the same face should produce low scores, while images of different faces should produce high scores.Every image is compared with every other image, no image is compared with itself and nopair is compared more than once (we assume that the relationship is symmetrical). Once two images have been compared, producing a similarity score, the ground-truth is used to determine if the images are of the same person or different people. In practical tests this information is often encapsulated as part of the image filename (by means of a unique person identifier). Scores are then stored in one of two lists: a list containing scores produced by comparing images of different people and a list containing scores produced by comparing images of the same person. The final acceptance/rejection decision is made by application of a threshold. Any incorrect decision is recorded as either a false acceptance or false rejection. The false rejection rate (FRR) is calculated as the percentage of scores from the same people that were classified as rejections. The false acceptance rate (FAR) is calculated as the percentage of scores from different people that were classified as acceptances.For IndexA = 0 to length(TestSet) For IndexB = IndexA+l to length(TestSet) Score = CompareFaces(TestSet[IndexA], TestSet[IndexB]) If IndexA and IndexB are the same person Append Score to AcceptScoresListElseAppend Score to RejectScoresListFor Threshold = Minimum Score to Maximum Score:FalseAcceptCount, FalseRejectCount = 0For each Score in RejectScoresListIf Score <= ThresholdIncrease FalseAcceptCountFor each Score in AcceptScoresListIf Score > ThresholdIncrease FalseRejectCountF alse AcceptRate = FalseAcceptCount / Length(AcceptScoresList)FalseRej ectRate = FalseRejectCount / length(RejectScoresList)Add plot to error curve at (FalseRejectRate, FalseAcceptRate)These two error rates express the inadequacies of the system when operating at aspecific threshold value. Ideally, both these figures should be zero, but in reality reducing either the FAR or FRR (by altering the threshold value) will inevitably resultin increasing the other. Therefore, in order to describe the full operating range of a particular system, we vary the threshold value through the entire range of scores produced. The application of each threshold value produces an additional FAR, FRR pair, which when plotted on a graph produces the error rate curve shown below.False Acceptance Rate / %Figure 4-5 - Example Error Rate Curve produced by the verification test.The equal error rate (EER) can be seen as the point at which FAR is equal to FRR. This EER value is often used as a single figure representing the general recognition performance of a biometric system and allows for easy visual comparison of multiple methods. However, it is important to note that the EER does not indicate the level of error that would be expected in a real world application. It is unlikely that any real system would use a threshold value such that the percentage of false acceptances were equal to the percentage of false rejections. Secure site access systems would typically set the threshold such that false acceptances were significantly lower than false rejections: unwilling to tolerate intruders at the cost of inconvenient access denials.Surveillance systems on the other hand would require low false rejection rates to successfully identify people in a less controlled environment. Therefore we should bear in mind that a system with a lower EER might not necessarily be the better performer towards the extremes of its operating capability.There is a strong connection between the above graph and the receiver operating characteristic (ROC) curves, also used in such experiments. Both graphs are simply two visualisations of the same results, in that the ROC format uses the True Acceptance Rate(TAR), where TAR = 1.0 - FRR in place of the FRR, effectively flipping the graph vertically. Another visualisation of the verification test results is to display both the FRR and FAR as functions of the threshold value. This presentation format provides a reference to determine the threshold value necessary to achieve a specific FRR and FAR. The EER can be seen as the point where the two curves intersect.Figure 4-6 - Example error rate curve as a function of the score threshold The fluctuation of these error curves due to noise and other errors is dependant on the number of face image comparisons made to generate the data. A small dataset that only allows fbr a small number of comparisons will results in a jagged curve, in which large steps correspond to the influence of a single image on a high proportion of the comparisons made. A typical dataset of 720 images (as used in section 4.2.2) provides 258,840 verification operations, hence a drop of 1% EER represents an additional 2588 correct decisions, whereas the quality of a single image could cause the EER to fluctuate by up to 0.28.422 ResultsAs a simple experiment to test the direct correlation method, we apply the technique described above to a test set of 720 images of 60 different people, taken from the AR Face Database [ 39 ]. Every image is compared with every other image in the test set to produce a likeness score, providing 258,840 verification operations from which to calculate false acceptance rates and false rejection rates. The error curve produced is shown in Figure 4-7.Figure 4-7 - Error rate curve produced by the direct correlation method using no image preprocessing.We see that an EER of 25.1% is produced, meaning that at the EER threshold approximately one quarter of all verification operations carried out resulted in an incorrect classification. Thereare a number of well-known reasons for this poor level of accuracy. Tiny changes in lighting, expression or head orientation cause the location in image space to change dramatically. Images in face space are moved far apart due to these image capture conditions, despite being of the same person's face. The distance between images of different people becomes smaller than the area of face space covered by images of the same person and hence false acceptances and false rejections occur frequently. Other disadvantages include the large amount of storage necessaryfor holding many face images and the intensive processing required for each comparison, making this method unsuitable fbr applications applied to a large database. In section 4.3 we explore the eigenface method, which attempts to address some of these issues.4二维人脸识别4.1功能定位在讨论比较两个人脸图像,我们现在就简要介绍的方法一些在人脸特征的初步调整过程。


•临床研究•腰椎退行性滑脱与棘间韧带MRI的T2WI高信号相关性分析经齐峰,沈水军,董毅,王俊,周金柱(杭州市萧山区第一人民医院放射科,浙江杭州311200)【摘要】目的:探讨腰椎退行性滑脱与MRI棘间韧带T2WI高信号之间的关系,以提高对棘间韧带信号改变的认识。
方法:收集2018年3月至2020年3月临床诊断为腰椎退行性滑脱43例患者的MRI资料,男19例,女24例,年龄50~92岁,平均69岁。
利用影像归档和通信系统(picturearchivingandcommunicationsystems,PACS)调阅影像,记录滑脱节段与非滑脱节段棘间韧带出现T2WI高信号的分布情况和发生率,利用Spearman分析棘间韧带的T2WI高信号与腰椎滑脱程度的关系。
结果:除8条韧带因图像显示不佳未计入统计结果外,43例患者共207个腰椎椎体和相应的棘间韧带入组研究。
根据Meyerding分型法,43例患者共有48个节段出现滑脱,I度滑脱41个节段,域度滑脱7个节段。
滑脱节段对应的棘间韧带出现T2WI高信号30例,其中L2.3节段3例,L3.4节段3例,蕴4,5节段20例丄5S]节段4例;159个非滑脱节段对应的棘间韧带出现T2WI高信号53例,其中L,.2节段6例,L?」节段6例,L s,*节段13例,L4.5节段7例丄5S]节段21例。
滑脱节段与非滑脱节段相比,棘间韧带T2WI高信号的发生率分别为62.5%和33.3%,差异有统计学意义(v2=13.06,P<0.05)遥Spearman相关分析显示棘间韧带T2WI高信号的出现与腰椎滑脱程度呈正相关(r=0.264,P<0.05)遥结论:退行性腰椎滑脱患者中滑脱椎体的棘间韧带出现T2WI高信号更多见,T2WI高信号的出现与椎体滑脱的程度呈正相关,在影像诊断中应引起足够重视。
【关键词】腰椎;脊椎滑脱;棘间韧带;磁共振成像./.中图分类号:R681.5DOI:10.12200/j.issn.l003-0034.2021.04.007开放科学(资源服务)标识码(OSID):.Correlation analysis between degenerative spondylolisthesis and T2WI hyperintensity on MRI of interspinous ligament JING匝i7/eng,S匀耘晕S澡怎円怎n,D0晕G再i,宰粤晕G允怎n,and在匀韵哉Jin-z澡怎.Department ofRadiology, the First Aop/e H匀ospita造o枣Xiaoshan,匀angzho怎311200,Zhej iang,ChinaABSTRACT Objective:To explore the relationship between lumbar degenerative spondylolisthesis and T2WI high signal inthe interspinous ligament in MRI in order to improve the understanding of the signal changes of the interspinous ligament. Methods:The clinical data of43patients with clinically diagnosed lumbar degenerative spondylolisthesis were collected fromMarch2018to March2020,there were19males and24females,aged50to92years with an average of69years ingpicture archiving and communication systems(PACS)to access images and record the distribution and incidence of T2WI highsignal in the interspinous ligament between the slipped and non・slipped ing Spearman correlation analysis to explore the relationship between the T2WI high signal of the interspinous ligament and the degree of lumbar spondylolisthesis. Results:Except for8ligaments that were not included in the statistical results due to poor image quality,43patients with a total of207lumbar vertebrae and interspinous ligaments were included in the study.According to the Meyerding classification method,43patients had a total of48segments with spondylolisthesis,41segments in grade I and7segments in grade域.There were30cases of MRI T2WI high signal in the interspinous ligament corresponding to spondylolisthesis segment,including3cases on L2,3segment,3cases on L3,4segment,20cases on L4,5segment,and4cases on L5S1segment.And there were53cases of MRI T2WI hyperintensity in159non-slipped interspinous ligaments,of which6cases were at L,2,6were at L2,3,13were on L3,4,7were on L4,5,and21were on pared with the non-slipped segment,the incidence of high signal on theT2WI of the interspinous ligament was62.5%and33.3%,respectively,and the difference was statistically significant(2=13.06,P<0.05).Spearman correlation analysis showed that the presence of T2WI hyperintensity of interspinous ligament was positively correlated with the degree of lumbar spondylolisthesis(r=0.264,P<0.05).Conclusion:In patients with degenerativelumbar spondylolisthesis,the MRI T2WI hyperintensity is more common in the interspinous ligament.The occurrence of T2WIhigh signal is positively correlated with the degree of spondylolisthesis,which should be payed enough attention in imaging di-通讯作者:周金柱E-mail:****************Corresponding author:ZHOU Jin-zhu E-mail:****************agnosis.KEYWORDS Lumber vfftfbfef ; Spondylolysis ; Interspinous ligament ; Magnetic ffsonenff imaging腰椎退行性滑脱(lumbardegenerative spondy lolisthesis ,LDS )是由于腰椎退行性变引起的相邻椎 体间的位置滑移,LDS 是导致中老年人下腰痛的一 个重要原因。
图像分类学习笔记:词袋模型和空间金字塔匹配Image Classification Framework:Bag-of-Words&Spatial Pyramid Matching一、基础:词袋模型(Bag of Words)Bag-of-Words(词袋、词包)模型,或称Bag of Features模型,源于文本分类技术。
在信息检索中,假定对于一个文本,忽略其词序和语法、句法。
将其仅仅看作是一个词的集合,每个词都是彼此概率独立的。
这样可以通过文档中单词出现的频率来对文档进行描述与表达。
Csurka等[1]于2004年将其引入计算机视觉领域。
其核心思想在于,图像可以视为一种文档对象,图像中不同的局部区域或其特征可看作构成图像的词汇,其中相近的区域或其特征可以视作为一个词。
这样,可以把每幅图像描述为一个局部区域/关键点(Patches/Key Points)特征的无序集合。
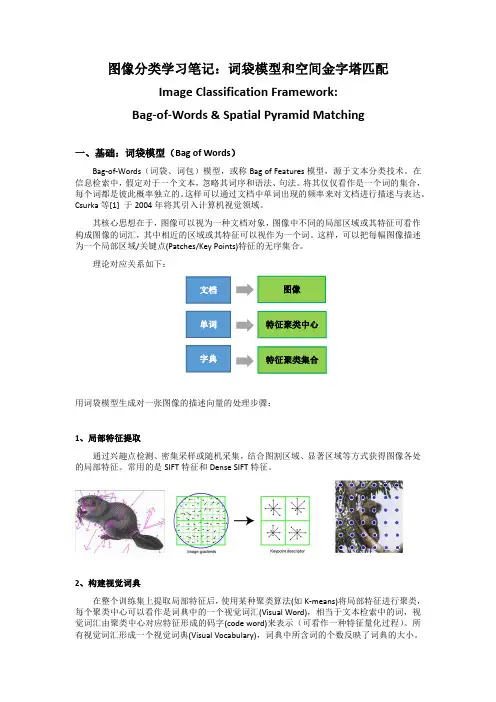
理论对应关系如下:图像特征聚类中心特征聚类集合用词袋模型生成对一张图像的描述向量的处理步骤:1、局部特征提取通过兴趣点检测、密集采样或随机采集,结合图割区域、显著区域等方式获得图像各处的局部特征。
常用的是SIFT特征和Dense SIFT特征。
2、构建视觉词典在整个训练集上提取局部特征后,使用某种聚类算法(如K-means)将局部特征进行聚类,每个聚类中心可以看作是词典中的一个视觉词汇(Visual Word),相当于文本检索中的词,视觉词汇由聚类中心对应特征形成的码字(code word)来表示(可看作一种特征量化过程)。
所有视觉词汇形成一个视觉词典(Visual Vocabulary),词典中所含词的个数反映了词典的大小。
3、特征量化编码图像中的每个特征都将被映射到视觉词典的某个词上,然后统计每个视觉词在一张图像上的出现次数,即可将该图像描述为一个维数固定的直方图向量。
4、训练分类模型并预测用于图像分类时,如上对训练集提取Bag-of-Features特征,在某种监督学习(如SVM)的策略下,对训练集的Bag-of-Features特征向量进行训练,获得对象或场景的分类模型;在分类模型下,对该特征进行预测,从而实现对待测图像的分类。
基于Fisher的线性判别回归分类算法曾贤灏;石全民【摘要】To improve the robustness of the linear regression classification (LRC) algorithm, a linear discrimi⁃nant regression classification algorithm based on Fisher criterion is proposed. The ratio of the between-classre⁃construction error over the within-class reconstruction error is maximized by Fisher criterion so as to find an opti⁃mal projection matrixfor the LRC. Then, all testing and training images are projected to each subspace by the op⁃timal projection matrix and Euclidean distances between testing image and all training images are computed. Fi⁃nally, K-nearest neighbor classifier is used to finish face recognition . Experimental results on AR face databases show that proposed method has better recognition effects than several other regression classification approaches.%为了提高线性回归分类(LRC)算法的鲁棒性,提出了一种基于Fisher准则的线性判别回归分类算法。
Color image segmentation using histogram thresholding –Fuzzy C-means hybrid approachKhang Siang Tan,Nor Ashidi Mat Isa nImaging and Intelligent Systems Research Team (ISRT),School of Electrical and Electronic Engineering,Engineering Campus,Universiti Sains Malaysia,14300Nibong Tebal,Penang,Malaysiaa r t i c l e i n f oArticle history:Received 29March 2010Received in revised form 2July 2010Accepted 4July 2010Keywords:Color image segmentation Histogram thresholding Fuzzy C-meansa b s t r a c tThis paper presents a novel histogram thresholding –fuzzy C-means hybrid (HTFCM)approach that could find different application in pattern recognition as well as in computer vision,particularly in color image segmentation.The proposed approach applies the histogram thresholding technique to obtain all possible uniform regions in the color image.Then,the Fuzzy C-means (FCM)algorithm is utilized to improve the compactness of the clusters forming these uniform regions.Experimental results have demonstrated that the low complexity of the proposed HTFCM approach could obtain better cluster quality and segmentation results than other segmentation approaches that employing ant colony algorithm.&2010Elsevier Ltd.All rights reserved.1.IntroductionColor is one of the most significant low-level features that can be used to extract homogeneous regions that are most of the time related to objects or part of objects [1–3].In a 24-bit true color image,the number of unique colors usually exceeds half of the image size and can reach up to 16millions.Most of these colors are perceptually close and cannot be differentiated by human eye that can only internally identify a number of 30colors in cognitive space [4,5].For all unique colors that perceptually close,they can be combined to form homogeneous regions representing the objects in the image and thus,the image could become more meaningful and easier to be analyzed.In image processing and computer vision,color image segmentation is a central task for image analysis and pattern recognition [6–23]It is a process of partitioning an image into multiple regions that are homogeneous with respect to one or more characteristics.Although many segmentation techniques have been appeared in scientific literature,they can be divided into image-domain based,physics based and feature-space based techniques [24].These segmentation techniques have been used extensively but each has its own advantages and limitations.Image-domain based techniques utilize both color features and spatial relationship among color in its homogeneity evaluation to perform segmenta-tion.These techniques produce the regions that have reasonablecompactness of regions but facing difficulty in the selection of suitable seed regions.Physics based techniques utilize the physical models of the reflection properties of material to carry out color segmentation but more application specific,as they model the causes that may produce color variation.Feature-based techniques utilize color features as the key and the only criteria to segment image.The segmented regions are usually fragmented since the spatial relationship among color is ignored [25].But this limitation can be solved by improving the compactness of the regions.In computer vision and pattern recognition,Fuzzy C-means (FCM)algorithm has been used extensively to improve the compactness of the regions due to its clustering validity and simplicity of implementation.It is a pixels clustering process of dividing pixels into clusters so that pixels in the same cluster are as similar as possible and those in different clusters are as dissimilar as possible.This accords with segmentation application since different regions should be visually as different as possible.However,its implementation often encounters two unavoidable initialization difficulties of deciding the cluster number and obtaining the initial cluster centroids that are properly distrib-uted.These initialization difficulties have their impacts on segmentation quality.While the difficulty of deciding the cluster number could affect the segmented area and region tolerance for feature variance,the difficulty of obtaining the initial cluster centroids could affect the cluster compactness and classification accuracy.Recently,some feature-based segmentation techniques have employed the concept of ant colony algorithm (ACA)to carry out image segmentation.Due to the intelligent searching ability of theContents lists available at ScienceDirectjournal homepage:/locate/prPattern Recognition0031-3203/$-see front matter &2010Elsevier Ltd.All rights reserved.doi:10.1016/j.patcog.2010.07.013nCorresponding author.Tel.:+6045996093;fax:+6045941023.E-mail addresses:khangsiang85@ (K.Siang Tan),ashidi@m.my (N.A.Mat Isa).Pattern Recognition 44(2011)1–15ACA,these techniques could achieve further optimization of segmentation results.But they are suffering from low efficiency due to their computational complexity.Apart from obtaining good segmentation result,the improved ant system algorithm(AS)as proposed in[26]could also provide a solution to overcome the FCM’s sensitiveness to the initialization condition of cluster centroids and centroid number.However,the AS technique does not seek for very compact clustering result in the feature space.To improve the performance of the AS,the ant colony–Fuzzy C-means hybrid algorithm(AFHA)is introduced[26].Essentially, the AFHA incorporates the FCM algorithm to the AS in order to improve the compactness of the clustering results in the feature space.However,its efficiency is still low due to computational complexity of the AS.To increase the algorithmic efficiency of the AFHA,the improved ant colony–Fuzzy C-means hybrid algorithm (IAFHA)is introduced[26].The IAFHA adds an ant sub-sampling based method to modify the AFHA in order to reduce its computational complexity thus has higher efficiency.Although the IAFHA’s efficiency has been increased,it still suffers from high computational complexity.In this paper,we propose a novel segmentation approach called Histogram Thresholding–Fuzzy C-means Hybrid(HTFCM) algorithm.The HTFCM consists of two modules,namely the histogram thresholding module and the FCM module.The histogram thresholding module is used for obtaining the FCM’s initialization condition of cluster centroids and centroid number. The implementation of this module does not require high computational complexity comparing to those techniques using ant system.This marked the simplicity of the proposed algorithm.The rest of the paper is organized as follows:Section2 presents the histogram thresholding module and the FCM module in detail.Section3provides the illustration of the implementation procedure.Section4analyzes the result obtained for the proposed approach and at the same time comparing it to other techniques. Finally,Section5concludes the work of this paper.2.Proposed approachIn this paper,we attempt to obtain a solution to overcome the FCM’s sensitiveness to the initialization conditions of cluster centroid and centroid number.The histogram thresholding module is introduced to initialize the FCM in view of the drawbacks by taking the global information of the image into consideration.In this module,the global information of the image is used to obtain all possible uniform regions in the image and thus the cluster centroids and centroid number could also be obtained.The FCM module is then used to improve the compactness of the clusters.In this context,the compactness refers to obtaining the optimized label for each cluster centroid from the members of each cluster.2.1.Histogram thresholdingGlobal histogram of a digital image is a popular tool for real-time image processing due to its simplicity in implementation.It serves as an important basis of statistical approaches in image processing by producing the global description of the image’s information[27].For color images with RGB representation,the color of a pixel is a mixture of the three primitive colors red,green and blue.Each image pixel can be viewed as three dimensional vector containing three components representing the three colors of an image pixel.Hence,the global histograms representing three primitive components,respectively,could produce the global information about the entire image.The basic analysis approach of global histogram is that a uniform region tends to form a dominating peak in the corresponding histogram.For a color image,a uniform region could be identified by the dominating peaks in the global histograms.Thus,histogram thresholding is a popular segmenta-tion technique that looks for the peaks and valleys in histogram [28,29].A typical segmentation approach based on histogram analysis can only be carried out if the dominating peaks in the histogram can be recognized correctly.Several widely used peak-finding algorithms examined the peak’s sharpness or area to identify the dominating peaks in the histogram.Although these peak-finding algorithms are useful in histogram analysis,they sometimes do not work well especially if the image contains noise or radical variation[30,31].In this paper,we propose a novel histogram thresholding technique containing three phases such as the peakfinding technique,the region initialization and the merging process.The histogram thresholding technique applies a peakfinding techni-que to identify the dominating peaks in the global histograms.The peakfinding algorithm could locate all the dominating peaks in the global histograms correctly and have been proven to be efficient by testing on numerous color images.As a result,the uniform regions in the image could be obtained.Since any uniform region contains3components representing the3colors of the RGB color image,each component of the uniform region is assigned one value corresponding to the intensity level of one dominating peak in their respective global histograms.Although the uniform regions are successfully obtained,some uniform regions are still perceptually close.Thus,a merging process is applied to merge these regions together.2.1.1.PeakfindingLet us suppose dealing with color image with RGB representa-tion which each of the primitive color components’intensity is stored in n-bit integer,giving a possible L¼2n intensity levels in the interval[0,LÀ1].Let r(i),g(i)and b(i)be the red component, the green component and the blue component histograms, respectively.Let x i,y i and z i be the number of pixels associated with i th intensity level in r(i),g(i)and b(i),respectively.The peakfinding algorithm can be described as follows:i.Represent the red component,green component and bluecomponent histograms by the following equations:rðiÞ¼x i,ð1ÞgðiÞ¼y i,ð2ÞbðiÞ¼z i,ð3Þwhere0r i r LÀ1.ii.From the original histogram,construct a new histogram curve with the following equation:T sðiÞ¼ðsðiÀ2ÞþsðiÀ1ÞþsðiÞþsðiþ1Þþsðiþ2ÞÞ5,ð4Þwhere s can be substituted by r,g and b and2r i r LÀ3.T r(i), T g(i)and T b(i)are the new histogram curves constructed from the red component,green component and blue component histograms,respectively.(Note:Based on analysis done using numerous images,the half window size can be set from2to5in this study.The half window size that is smaller than2could not produce a smooth histogram curve while large half window size could produce different general shape of a smooth histogram curve when comparing it to the original histogram.)K.Siang Tan,N.A.Mat Isa/Pattern Recognition44(2011)1–15 2iii.Identify all peaks using the following equation:P s¼ðði,T sðiÞÞ9T sðiÞ4T sðiÀ1Þand T sðiÞ4T sðiþ1ÞÞ,ð5Þwhere s can be substituted by r,g and b and1r i r LÀ2.P r,P g and P b are the set of peaks identified from T r(i),T g(i)and T b(i), respectively.iv.Identify all valleys using the following equation:V s¼ðði,T sðiÞÞ9T sðiÞo T sðiÀ1Þand T sðiÞo T sðiþ1ÞÞ,ð6Þwhere s can be substituted by r,g and b and1r i r LÀ2.V r,V g and V b are the set of valleys identified from T r(i),T g(i)and T b(i), respectively.v.Remove all peaks and valleys based on the following fuzzy rule base:IFði is peakÞANDðT sðiþ1Þ4T sðiÀ1ÞÞTHENðT sðiÞ¼T sðiþ1ÞÞIFði is peakÞANDðT sðiþ1Þo T sðiÀ1ÞÞTHENðT sðiÞ¼T sðiÀ1ÞÞIFði is valleyÞANDðT sðiþ1Þ4T sðiÀ1ÞÞTHENðT sðiÞ¼T sðiÀ1ÞÞIFði is valleyÞANDðT sðiþ1Þo T sðiÀ1ÞÞTHENðT sðiÞ¼T sðiþ1ÞÞ,ð7Þwhere s can be substituted by r,g and b and1r i r LÀ2.vi.Identify the dominating peaks in T r(i),T g(i)and T b(i)by examining the turning point which having positive to negative gradient change and the number of pixels is greater than a predefined threshold,H.(Note:Based on analysis done using numerous images,the typical value for H is set to20.)2.1.2.Region initializationAfter the peakfinding algorithm,three sets of dominating peak’s intensity level in the red,green and blue component histograms,respectively,are obtained.Let x,y and z be the number of dominating peaks identified in the red component, green component and blue component histograms,respectively. Then P r¼(i1,i2,y,i x),P g¼(i1,i2,y,i y)and P b¼(i1,i2,y,i z) are the sets of dominating peak’s intensity levels in the red component,green component and blue component histo-grams,respectively.A uniform region labeling by a cluster centroid tends to form one dominating peak in the red, green and blue component histograms,respectively.In this paper,the region initialization algorithm can be described as follows:i.Form all the possible cluster centroids(Note:Each componentof the cluster centroids can only take the intensity level of one dominating peak in the red,green and blue histogram, respectively.Thus,a number of(xÂyÂz)possible cluster centroids are formed.)ii.Assign every image pixels to the nearest cluster centroid and form the pixel set of each cluster by assigning them to their corresponding cluster centroid.iii.Eliminate all cluster centroids that having the number of pixels assigned to them is less than a threshold,V.(Note:To reduce the initial cluster centroid number,the value for V is set to0.006NÀ0.008N where N is the total number of pixels in that image.)iv.Reassign every image pixels to the nearest cluster centroid.(Note:Let c l be the l th element in the cluster centroid set and X l be the pixel set that are assigned to c l.)v.Update each cluster centroid,c l by the mode of its pixel set,X l, respectively.2.1.3.MergingAfter the region initialization algorithm,the uniform regions labeling by their respective cluster centroids are obtained.Some of these regions are perceptually close and could be merged together in order to produce a more concise set of cluster centroids representing the uniform region.Thus,a merging algorithm is needed to merge these regions based on their color similarity.One of the simplest measures of color similarity is the Euclidean distance which is used to measure the color difference between two uniform regions.Let C¼(c1,c2,y,c M)be the set of cluster centroids and M be the number of cluster centroids.In this paper,the merging algorithm can be described as follows:i.Set the maximum threshold of Euclidean distance,dc to apositive integer value.ii.Calculate the distance,D for any two out of these M cluster centroids with the following equation:D c j,c kÀÁ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðR jÀR kÞ2þðG jÀG kÞ2þðB jÀB kÞ2q,8j a k,ð8Þwhere1r j r M and1r k r M.R j,G j and B j are the value of the red,green and blue component of the j th cluster centroid, respectively,and R k,G k and B k are the value of the red,green and blue component of the k th cluster centroid,respectively. iii.Find the minimum distance between two nearest cluster centroids.Merge these nearest cluster centroids to form the new cluster centroid if the minimum distance between them is less than dc.Otherwise,stop the merging process.iv.Update the pixel set that assigned to the new cluster centroid by merging the pixel sets that assigned to these nearest cluster centroids.v.Refresh the new cluster centroid by the mode of its pixel set. vi.Reduce the number of cluster centroids,M to(MÀ1)and repeat steps ii to vi until no minimum distance between two nearest cluster centroids is less than dc.(Note:Based on analysis done using numerous images,the number of cluster centroids remain constant for most of the images by varying dc from24to32.)2.2.Fuzzy C-meansThe FCM algorithm is essentially a Hill-Climbing technique which was developed by Dunn in1973[32]and improved by Bezdek in1981[33].This algorithm has been used as one of the popular clustering techniques for image segmentation in compu-ter vision and pattern recognition.In the FCM,each image pixels having certain membership degree associated with each cluster centroids.These membership degrees having values in the range [0,1]and indicate the strength of the association between that image pixel and a particular cluster centroid.The FCM algorithm attempts to partition every image pixels into a collection of the M fuzzy cluster centroids with respect to some given criterion[34].Let N be the total number of pixels in that image and m be the exponential weight of membership degree.The objective function W m of the FCM is defined asW mðU,CÞ¼X Ni¼1X Mj¼1u mjid2ji,ð9Þwhere u ji is the membership degree of i th pixel to j th cluster centroid and d ji is the distance between i th pixel and j th cluster centroid.Let U i¼(u1i,u2i,y,u Mi)T is the set of membership degree of i th pixel associated with each cluster centroids,x i is the i th pixel in the image and c j is the j th cluster centroid.Then U¼(U1, U2,y,U N)is the membership degree matrix and C¼(c1,c2,y,c M) is the set of cluster centroids.K.Siang Tan,N.A.Mat Isa/Pattern Recognition44(2011)1–153The degree of compactness and uniformity of the cluster centroids greatly depend on the objective function of the FCM.In general,a smaller objective function of the FCM indicates a more compact and uniform cluster centroid set.However,there is no close form solution to produce minimization of the objective function.To achieve the optimization of the objective function,an iteration process must be carried out by the FCM algorithm.In this paper,the FCM is employed to improve the compactness of the clusters produced by the histogram thresholding module.The FCM can be described as follows:i.Set the iteration terminating threshold,e to a small positive number in the range [0,1]and the number of iteration q to 0.ii.Calculate U (q )according to C (q )with the following equation:u ji ¼1P Mk ¼1ðd ji =d ki Þ2=ðm À1Þ,ð10Þwhere 1r j r M and 1r i r N .Notice that if d ji ¼0,then u ji ¼1and set others membership degrees of this pixel to 0.iii.Calculate C (q +1)according to U (q )with the following equation:c j ¼P Ni ¼1u mji x iP i ¼1u m ji ,ð11Þwhere 1r j r M .iv.Update U (q +1)according to C (q +1)with Eq.(10).pare U (q +1)with U (q ).If :U (q +1)ÀU (q ):r e ,stop iteration.Otherwise,q ¼q +1,and repeat steps ii to iv until :U (q +1)ÀU (q ):4e .3.Illustration of the implementation procedureIn this section,we apply the HTFCM approach to perform the segmentation with the 256Â256image House depicted in Fig.1(a).Figs.2(a),3(a)and 4(a)show the red,green and blue component histogram of the image,respectively.In Fig.2(a),the dominating peaks that could represent the red component of dominant regions are difficult to be recognized as a large number of small peaks exist in the histogram.The similar case has also been shown in Figs.3(a)and 4(a).These small peaks must be removed so that the dominating peaks can be recognized effectively.Thus,the dominating peaks are recognized according to the proposed peak finding technique.Figs.2(b),3(b)and 4(b)show the resultant histogram curves,after applying the proposed peak finding technique.Since the general shape of each resultant histogram curve have a great similarity with their respective original histogram,the dominating peak in the histogram curve can be considered as the dominating peak in their respective histogram.Furthermore,each of the resultant histogram curves gives better degree of smoothness than their respective original histogram.As a result,the dominating peaks in the histogram canbe recognized easily by examining the histogram curve.Then,the initial clusters are formed by assigning every pixel to their cluster centroids,respectively.For example,the left uppermost pixel in the image having the RGB value of (159,197,222)is assigned to the centroid having the RGB value of (159,199,224)since the Euclidean distance between the pixel and the centroid is the shortest compared to other centroids.The RGB valueofFig.1.Image House and its segmentation results.(a)Original image House ,(b)image after cluster centroid initialization,(c)image after merging and (d)final segmentationresult.Fig.2.(a)Red component histogram of image House ,(b)resultant histogram curve after peak finding technique (Note:The intensity level of the dominating peaks is labeled by x ).K.Siang Tan,N.A.Mat Isa /Pattern Recognition 44(2011)1–154the centroid is obtained from one of the dominating peaks in Figs.2(b),3(b)and 4(b),respectively.The result of initial clusters is illustrated in Fig.1(b).Next,the merging process is carried out to merge all the clusters that are perceptually close.This merging process is able to reduce the cluster number and keep a reasonable cluster number for all kinds of input images.The result of the merging process is illustrated in Fig.1(c).Finally,the FCM algorithm is applied to perform color segmentation.The final segmentation result is illustrated in Fig.1(d).4.Experiment resultsThe HTFCM approach has been tested on more than 200images taken from public image segmentation databases.In this paper,30images are selected to demonstrate the capability of the proposed HTFCM approach.8out of these images namely House (256Â256),Football (256Â256),Golden Gate (256Â256),Smarties (256Â256),Capsicum (256Â256),Gantry Crane (400Â264),Beach (321Â481)and Girl (321Â481)are evaluated in details to highlight the advantages of the proposed HTFCM approach.While another 22images are presented as supplementary images to further support the findings.The AS,the AFHA and the IAFHA approaches which are proved to be able to provide good solution to overcome the FCM’s sensitiveness to the initialization condi-tions of cluster centroids and centroid number are used as comparison in order to see whether the HTFCM approach could result in generally better performance and cluster quality than these approaches.The performance of the HTFCM approach is evaluated by comparing the algorithmic efficiency and the segmentation results with the AS,the AFHA and the IAFHA approaches.In this study,we fix dc as 28since it tend to produce reasonable results for the AS,the AFHA,the IAFHA [26]and the HTFCM approaches.4.1.Evaluation on segmentation resultsIn this section,the segmentation results for the AS,the AFHA,the IAFHA and the HTFCM approaches are evaluated visually.Generally,as shown in Figs.5–12,the proposed HTFCM approach produces better segmentation results as compared to the AS,theFig.3.(a)Green component histogram of image House and (b)resultant histogram curve after peak finding technique (Note:The intensity level of the dominating peaks is labeled by x.).Fig.4.(a)Blue component histogram of image House and (b)resultant histogram curve after peak finding technique (Note:The intensity level of the dominating peaks is labeled by x .).K.Siang Tan,N.A.Mat Isa /Pattern Recognition 44(2011)1–155AFHA and the IAFHA approaches.The segmented regions of the resultant images produced by the HTFCM approach are more homogeneous.For example,notice for the image House ,the HTFCM approach gives better segmentation result than the AS,the AFHA and the IAFHA approaches by producing more homogeneous house roof and walls as depicted in Fig.5.In the image Football ,the HTFCM approach also outperforms the AS,the AFHA and the IAFHA approaches by giving more homogeneous background as shown in Fig.6.As for the image Golden Gate ,although the AS,the AFHA and the IAFHA approaches produce homogeneous sky region,but an obvious classification error could be seen where these approaches mistakenly assign considerable pixels of the leave of tree as part of the bridge.The proposed HTFCM approach successfully avoids this classification error and furthermore,produces more homogeneous hill and sea regions as shown in Fig.7.In the image Capsicum ,the proposedHTFCMFig.5.The image House :(a)original image,and the rest are segmentation results of the test image by various algorithms (b)AS,(c)AFHA,(d)IAFHA,and (e)HTFCM.Fig.6.The image Football :(a)original image,and the rest are segmentation results of the test image by various algorithms (b)AS,(c)AFHA,(d)IAFHA,and (e)HTFCM.K.Siang Tan,N.A.Mat Isa /Pattern Recognition 44(2011)1–156approach also outperforms other techniques by producing more homogeneous red capsicum as depicted in Fig.8.Notice for the image Smarties ,the AS,the AFHA and the IAFHA approaches mistakenly assign considerable pixels of the background as part of the green Smarties.The proposed HTFCM approach successfully avoids this classification error and furthermore,produces more homogeneous background as shown in Fig.9.As for the image Beach ,the HTFCM approach outperforms others approaches by giving more homogeneous beach and sea as depicted in Fig.10.As for the image Gantry Crane ,there is a classification error where part of the left-inclined truss has been assigned to the sky by the AS,the AFHA and the IAFHA approaches as shown in Fig.11.The proposed HTFCM successfully avoids this classification error.The similar result is obtained for the image Girl .The HTFCM approach outperforms other approaches by classifying the blue and red part of the shirt as single cluster while theAS,Fig.7.The image Golden Gate :(a)original image,and the rest are segmentation results of the test image by various algorithms (b)AS,(c)AFHA,(d)IAFHA,and (e)HTFCM.Fig.8.The image Capsicum :(a)original image,and the rest are segmentation results of the test image by various algorithms (b)AS,(c)AFHA,(d)IAFHA,and (e)HTFCM.K.Siang Tan,N.A.Mat Isa /Pattern Recognition 44(2011)1–157Fig.9.The image Smarties :(a)original image,and the rest are segmentation results of the test image by various algorithms (b)AS,(c)AFHA,(d)IAFHA,and (e)HTFCM.Fig.10.The image Beach :(a)original image,and the rest are segmentation results of the test image by various algorithms (b)AS,(c)AFHA,(d)IAFHA,and (e)HTFCM.K.Siang Tan,N.A.Mat Isa /Pattern Recognition 44(2011)1–158。



Phase-Based User-Steered Image Segmentation Lauren O’Donnell1,Carl-Fredrik Westin1,2,W.Eric L.Grimson1, Juan Ruiz-Alzola3,Martha E.Shenton2,and Ron Kikinis21MIT AI Laboratory,Cambridge MA02139,USAodonnell,***********.edu2Brigham and Women’s Hospital,Harvard Medical School,Boston MA,USAwestin,*******************.edu3Dept.of Signals and Communications,University of Las Palmas de Gran Canaria,Spain***************.esAbstract.This paper presents a user-steered segmentation algorithmbased on the livewire paradigm.Livewire is an image-feature drivenmethod thatfinds the optimal path between user-selected image loca-tions,thus reducing the need to manually define the complete boundary.We introduce an image feature based on local phase,which describes lo-cal edge symmetry independent of absolute gray value.Because phase isamplitude invariant,the measurements are robust with respect to smoothvariations,such as biasfield inhomogeneities present in all MR images.Inorder to enable validation of our segmentation method,we have createda system that continuously records user interaction and automaticallygenerates a database containing the number of user interactions,such asmouse events,and time stamps from various editing modules.We haveconducted validation trials of the system and obtained expert opinionsregarding its functionality.1IntroductionMedical image segmentation is the process of assigning labels to voxels in order to indicate tissue type or anatomical structure.This labeled data has a variety of applications,for example the quantification of anatomical volume and shape,or the construction of detailed three-dimensional models of the anatomy of interest.Existing segmentation methods range from manual,to semi-automatic,to fully automatic.Automatic algorithms include intensity-based methods,such as EM segmentation[14]and level-sets[4],as well as knowledge-based methods such as segmentation by warping to an anatomical atlas.Semi-automatic algorithms, which require user interaction during the process,include snakes[11]and livewire [1,7].Current practice in many cases,however,is computer-enhanced manual segmentation.This involves hand-tracing around the structures of interest and perhaps employing morphological or thresholding operations to the data.Although manual segmentation methods allow the highest degree of user control and enable decisions to be made on the basis of extensive anatomical knowledge,they require excessive amounts of user interaction time and mayW.Niessen and M.Viergever(Eds.):MICCAI2001,LNCS2208,pp.1022–1030,2001.c Springer-Verlag Berlin Heidelberg2001Phase-Based User-Steered Image Segmentation1023 introduce high levels of variability.On the other hand,fully automatic algorithms may not produce the correct outcome every time,hence there exists a need for hybrid methods.2Existing Software PlatformThe phase-based livewire segmentation method has been integrated into the 3D Slicer,the Surgical Planning Lab’s platform for image visualization,image segmentation,and surgical guidance[9].The Slicer is the laboratory’s program of choice for manual segmentation,as well as being modular and extensible,and consequently it is the logical place to incorporate new algorithms for our user base.At any time during an average day,one would expect tofind ten people doing segmentations using the3D Slicer in the laboratory,which shows that any improvement on manual methods will be of great utility.Our system has been added into the Slicer as a new module,Phasewire,in the Image Editor.3The Livewire AlgorithmThe motivation behind the livewire algorithm is to provide the user with full control over the segmentation while having the computer do most of the detail work[1].In this way,user interaction complements the ability of the computer tofind boundaries of structures in an image.Initially when using this method,the user clicks to indicate a starting point on the desired contour,and then as the mouse is moved it pulls a“live wire”behind it along the contour.When the user clicks again,the old wire freezes on the contour,and a new live one starts from the clicked point.This intuitive method is driven only by image information,with little geometric constraint,so extracting knowledge from the image is of primary importance.The livewire method poses this problem as a search for shortest paths on a weighted graph.Thus the livewire algorithm has two main parts,first the conversion of image information into a weighted graph,and then the calculation of shortest paths in the graph[6,12].In thefirst part of the livewire algorithm,weights are calculated for each edge in the weighted graph,creating the image forces that attract the livewire. To produce the weights,various image features are computed in a neighborhood around eachgraphedge,transformed to give low edge costs to more desirable feature values,and then combined in some user-adjustable fashion.The general purpose of the combination is edge localization,but individual features are gen-erally chosen for their contributions in three main areas,which we will call“edge detection,”“directionality,”and“training.”Features suchas th e gradient and the Laplacian zero-crossing[13]have been used for edge detection;these features are the main attractors for the livewire.Second,directionality,or the direction the path should take locally,can be influenced by gradients computed with ori-ented kernels[7],or the“gradient direction”feature[13].Third,training is the1024L.O’Donnell et al.process by which the user indicates a preference for a certain type of bound-ary,and the image features are transformed accordingly.Image gradients and intensity values[7],as well as gradient magnitudes[13],are useful in training.In the second part of the livewire algorithm,Dijkstra’s algorithm[5]is used to find all shortest paths extending outward from the starting point in the weighted graph.The livewire is defined as the shortest path that connects two user-selected points(the last clicked point and the current mouse location).This second step is done interactively so the user may view and judge potential paths,and con-trol the segmentation asfinely as desired.The implementation for this paper is similar to that in[6],where the shortest paths are computed for only as much of the image as necessary,making for very quick user interaction.4Phase-Based Livewire4.1Background on Local PhaseThe local phase as discussed in this paper is a multidimensional generalization of the concept of instantaneous phase,which is formally defined as the argument of the analytic functionf A=f−if Hi(1) where f Hi denotes the Hilbert transform of f[2,3].The instantaneous phase of a simple one-dimensional signal is shown in Fig-ure1.This simple signal can be thought of as the intensity along a row of pixels in an image.Note that in this“image”there are two edges,or regions where the signal shape is locally odd,and the phase curve reacts to each,giving phase values ofπ/2and−π/2.Fig.1.AThe output from a local phasefilter,i.e.a Gaborfilter,is an analytic function that can be represented as an even real part and an odd imaginary part,or anPhase-Based User-Steered Image Segmentation1025 amplitude and an argument.Consequently,this type offilter can be used to estimate both the amplitude(energy)and the local phase of a signal.As local phase is invariant to signal energy,edges can be detected from small or large signal variations.This is advantageous for segmentation along weak as well as strong edges.Another advantage is that local phase is in general a smoothly varying function of the image,and provides subpixel information about edge position.4.2ImplementationTo estimate the phase we are using quadraturefilters which have a radial fre-quency function that is Gaussian on a logarithmic scale:ν(ρ)=e−4log2B−2log2(ρρi)(2) whereρi is the center frequency and B is the6dB sensitivity bandwidth in octaves.In contrast to Gaborfilters,thesefilters have zero response for negative frequencies,ensuring that the odd and even parts constitute a Hilbert transform pair and making thefilters ideal for estimation of local phase[10].We multiply thefilters with a cos2radial function window in the frequency domain to reduce ringing artifacts arising from the discontinuity atπwhen usingfilters with high center frequencies and/or large bandwidth.The local phase is our primary feature,serving to localize edges in the image: the livewire essentially follows along low-cost curves in the phase image.The phase feature is scaled to provide bounded input to the shortest-paths search. Figure2shows a phase image derived from the original image shown in Figure 4.Since the argument of the phase is not sensitive to the amount of energy in the signal,it is useful to also quantify the certainty of the phase estimate.In image regions where the phase magnitude is large,the energy of the signal is high,which implies that the the phase estimate in that region has high reliability and thus high certainty.We define the certainty using the magnitude from the quadraturefilters, mapped through a gating function.By inverting this certainty measure,it can be used as a second feature in the livewire cost function.The weighted combination of the phase and certainty images produces an output image that describes the edge costs in the weighted graph,as in Figure2.5ApplicationsIn this section,we describe the behavior of our phase-based segmentation tech-nique through a series of experiments with medical images.In thefirst set of experiments,we show the stability of phase information across different scales[8].The input to the quadraturefilters was blurred using a Gaussian kernel of variance4pixels.Figure3demonstrates the robustness1026L.O’Donnell et al.Local Phase Image Combined ImageFig.2.Local phase images.The left-hand image shows the local phase corre-sponding to the grayscale image in Figure 4.This is the primary feature employed in our phase-based livewire method.The right-hand image displays the weighted combination of the phase and certainty features,which emphasizes boundaries in the image.Darker pixels correspond to lower edge costs on the weighted graph.of phase information to changes in scale,as the two segmentations are quite similar.The leftmost image is the original grayscale and its segmentation,while the center image shows the result of Gaussian blurring.The rightmost image displays the segmentation curve from the blurred image over the original image for comparison.The second experiments contrast the new livewire feature,phase,with our original intensity-based livewire implementation.Phase is more intuitive to use,produces smoother output,and is generally more user-friendly than the intensity-based method as illustrated in Figure 4.In contrast to the intensity-based method,no training step is required to bias the phase-based method towards the desired edge type,as the phase information can be used to follow weak or strong edges.6Discussion and Validation FrameworkWe have presented a user-steered segmentation algorithm which is based on the livewire paradigm.Our preliminary results using local phase as the main driving force are promising and support the concept that phase is a fairly stable feature in scale space [8].The method is intuitive to use,and requires no training despite having fewer input image features than other livewire implementations.In order to enable validation of phase-based livewire,we have created a sys-tem that continuously records user interaction and can generate a database con-taining the number of user interactions and time stamps from various editing modules.A selection of the items which are recorded is listed in Table 1.AnPhase-Based User-Steered Image Segmentation1027Original Image Gaussian Blurring Overlay of SegmentationFig.3.Illustration of insensitivity to changes in scale:initial image,result of Gaussian blurring,and overlay of second segmentation(done on the blurred image)on initial image.Note the similarity between the segmentation contours, despite blurring the image with a Gaussian kernel of four pixel variance. ongoing study using this system will enable evaluation of the performance and utility of different image features for guiding the livewire.Analysis of the logged information has shown that great variability exists in segmentation times,partially due to users’segmentation style,learning curve, and type of image data,and also due to factors we cannot measure,suchas time spent using other programs with the Slicer Editor window open.A complete comparison of the phasewire and manual segmentations systems,consequently, is difficult,and perhaps the most reliable indication of the system performance can be found in the opinions of doctors who have used it.Table2demonstrates the utility of the segmentation method using infor-mation from the logging system,and Table3gives doctors’opinions regarding ease of use and quality of output segmentations.For example,Figure5shows a liver segmentation done with phasewire,in which the doctor remarked that the three-dimensional model was more anatomically accurate than the one pro-duced with the manual method,where both segmentations were performed in approximately the same amount of time.This is likely due to the smoothness of the contour obtained with phasewire,in comparison with the contour obtained with the manual method.Item Logged Detailsmouse clicks recorded per slice,per label value,per volume,and per editor module elapsed time recorded per slice,per label value,per volume,and per editor module description includes volumes viewed and location of scene descriptionfile username will allow investigation of learning curveTable1.Selected items logged by the3D Slicer for validation and comparison purposes.1028L.O’Donnell et al.parison of phase-based and intensity-based implementations of livewire.On the left is our original implementation of livewire,which uses image-intensity based features.It does a poorer job of segmenting gray and white mat-ter.Training was performed on the region in the upper left of the image.The segmentation was more difficult to perform than the phase-based segmentation because more coercing was necessary to force the livewire to take an accept-able path.The right image shows segmentation of the same boundary using the phase-based livewire.Contrary to the intensity-based method,no training was necessary before beginning to segment.The conclusion is that the phase-based implementation is more intuitive to use than the intensity-based version,since the phase image gives continuous contours for the livewire to follow.Rather than being distracted by unwanted pixels locally,the phase livewire is generally only distracted by other paths,and a small movement of the mouse can set it back on the desired path.It can be quitefluid to use,with clicks mainly necessary when the curve bends in order to keep the wire following the correct contour. 7AcknowledgementsThe work was funded in part by CIMIT and NIH P41-RR13218(RK,CFW),by a National Science Foundation G raduate ResearchFellowsh ip(LJO),by NIH R01 RR11747(RK),by Department of Veterans Affairs Merit Awards,NIH grants K02MH01110and R01MH50747(MS),and by European Commission and Spanish Gov.joint research grant1FD97-0881-C02-01(JR).Thanks to the Radi-ation Oncology,Medical Physics,Neurosurgery,Urology,and Gastroenterology Departments of Hospital Doctor Negrin in Las Palmas de Gran Canaria,Spain, for their participation in evaluation of the system.Also thanks to Aleksandra Ciszewski for her valuable feedback regarding the Slicer system. References1.W.A.Barrett and E.N.Mortensen.Interactive live-wire boundary extraction.Medical Image Analysis,1(4):331–341,1997.Phase-Based User-Steered Image Segmentation1029Fig.5.A surface model of the liver,created from a phasewire segmentation, shows well-defined surfaces between the liver and the kidney and gallbladder. study method total clicks clicks/slice time/slice(sec)volume(mL) CT brain tumor manual23426.039.368.5phasewire9710.828.767.3phasewire10912.125.569.2CT bladder manual148828.131.7715.6phasewire359 6.821.5710.8Table2.Example segmentations performed withPh asewire.Clicks and time per slice are averages over the dataset.2.Boualem Boashash.Estimating and interpreting the instantaneous frequency of asignal-part1:Fundamentals.Proceedings of the IEEE,80(4),1992.3.Boualem Boashash.Estimating and interpreting the instantaneous frequency of asignal-part2:Algorithms and applications.Proceedings of the IEEE,80(4),1992.4.V.Caselles,R.Kimmel,G.Sapiro,C.Sbert.Minimal Surfaces:A Three DimensionalSegmentation Approach.Technion EE Pub973,1995.5. E.W.Dijkstra A Note On Two Problems in Connexion With Graphs NumerischeMathematik,269–271,1959.6. A.X.Falcao,J.K.Udupa,and F.K.Miyazawa.An Ultra-Fast User-Steered ImageSegmentation Paradigm:Live Wire on the Fly.IEEE Transactions on Medical Imaging,19(1):55–61,2000.7. A.X.Falcao,J.K.Udupa,S.Samarasekera,and er-Steered ImageSegmentation Paradigms:Live Wire and Live Lane.Graphical Models and Image Processing,60:233–260,1998.8. D.J.Fleet and A.D.Jepson.Stability of Phase Information IEEE Trans.PAMI,15(12):1253–1268,1993.9. D.T.Gering,A.Nabavi,R.Kikinis,W.E.L.Grimson,N.Hata,P.Everett,andF.Jolesz and W.Wells.An Integrated Visualization System for Surgical Plan-ning and Guidance Using Image Fusion and Interventional Imaging.Medical Image Computing and Computer-Assisted Intervention-MICCAI’99,809–819,1999.1030L.O’Donnell et al.study method ease of use segmentation qualityCT brain tumor manual33phasewire44CT bladder manual 2.73phasewire44Table3.Doctors’comparison of Phasewire and Manual segmentation methods on the datasets from Table2.The scale is from1to5,with5being the highest.10.H.Knutsson and C.-F.Westin and G.H.Granlund.Local Multiscale Frequencyand Bandwidth Estimation Proceedings of IEEE International Conference on Image Processing,36–40,1994.11.T.McInerney,D.Terzopoulos.Deformable Models in Medical Image Analysis:ASurvey.Medical Image Analysis,1(2):91–108,1996.12. E.N.Mortensen and W.A.Barrett.Interactive Segmentation with IntelligentScissors.Graphical Models and Image Processing,60(5):349–384,1998.13. E.N.Mortensen and W.A.Barrett.Intelligent Scissors for Image Composition.Computer Graphics(SIGGRAPH‘95),191–198,1995.14.W.M.Wells,R.Kikinis,W.E.L.Grimson,F.Jolesz.Adaptive segmentation ofMRI data.IEEE Transactions on Medical Imaging,15:429–442,1996.。
Caltech 101(加利福尼亚理工学院101类图像数据库)数据摘要:Pictures of objects belonging to 101 categories. About 40 to 800 images per category. Most categories have about 50 images. Collected in September 2003 by Fei-Fei Li, Marco Andreetto, and Marc 'Aurelio Ranzato. The size of each image is roughly 300 x 200 pixels.We have carefully clicked outlines of each object in these pictures, these are included under the 'Annotations.tar'. There is also a matlab script to view the annotaitons, 'show_annotations.m'.The Caltech 101 dataset consists of a total of 9146 images, split between 101 different object categories, as well as an additionalbackground/clutter category.Each object category contains between 40 and 800 images on average. Common and popular categories such as faces tend to have a larger number of images than less used categories. Each image is about 300x200 pixels in dimension. Images of oriented objects such as airplanes and motorcycles were mirrored to be left-right aligned, and vertically oriented structures such as buildings were rotated to be off axis.中文关键词:识别,多类,分类,标注,轮廓,英文关键词:Recognition,Multi class,Categories,Annotations,Outline,数据格式:IMAGE数据用途:To train and test several Computer Vision recognition and classification algorithms.数据详细介绍:Caltech 101DescriptionPictures of objects belonging to 101 categories. About 40 to 800 images per category. Most categories have about 50 images. Collected in September 2003 by Fei-Fei Li, Marco Andreetto, and Marc 'Aurelio Ranzato. The size of each image is roughly 300 x 200 pixels.We have carefully clicked outlines of each object in these pictures, these are included under the 'Annotations.tar'. There is also a matlab script to view the annotaitons, 'show_annotations.m'.How to use the datasetIf you are using the Caltech 101 dataset for testing your recognition algorithm you should try and make your results comparable to the results of others. We suggest training and testing on fixed number of pictures and repeating theexperiment with different random selections of pictures in order to obtain error bars. Popular number of training images: 1, 3, 5, 10, 15, 20, 30. Popular numbers of testing images: 20, 30. See also the discussion below.When you report your results please keep track of which images you used and which were misclassified. We will soon publish a more detailed experimental protocol that allows you to report those details. See the Discussion section for more details.LiteraturePapers reporting experiments on Caltech 101 images:1. Learning generative visual models from few training examples: an incremental Bayesian approach tested on 101 object categories. L. Fei-Fei, R. Fergus, and P. Perona. CVPR 2004, Workshop on Generative-Model Based Vision. 20042. Shape Matching and Object Recognition using Low Distortion Correspondence. Alexander C. Berg, Tamara L. Berg, Jitendra Malik. CVPR 20053. The Pyramid Match Kernel:Discriminative Classification with Sets of Image Features. K. Grauman and T. Darrell. International Conference on Computer Vision (ICCV), 2005.4. Combining Generative Models and Fisher Kernels for Object Class Recognition Holub, AD. Welling, M. Perona, P. International Conference on Computer Vision (ICCV), 2005.5. Object Recognition with Features Inspired by Visual Cortex. T. Serre, L. Wolf and T. Poggio. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2005), IEEE Computer Society Press, San Diego, June 2005.6. SVM-KNN: Discriminative Nearest Neighbor Classification for Visual Category Recognition. Hao Zhang, Alex Berg, Michael Maire, Jitendra Malik. CVPR, 2006.7. Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories. Svetlana Lazebnik, Cordelia Schmid, and Jean Ponce. CVPR, 2006 (accepted).8. Empirical study of multi-scale filter banks for object categorization, M.J. Marín-Jiménez, and N. Pérez de la Blanca. December 2005. Tech Report.9. Multiclass Object Recognition with Sparse, Localized Features, Jim Mutch and David G. Lowe. , pg. 11-18, CVPR 2006, IEEE Computer Society Press, New York, June 2006.10. Using Dependant Regions or Object Categorization in a Generative Framework, G. Wang, Y. Zhang, and L. Fei-Fei. IEEE Comp. Vis. Patt. Recog. 2006数据预览:点此下载完整数据集。
Material Safety Data SheetMentholACC# 23818Section 1 - Chemical Product and Company IdentificationMSDS Name: MentholCatalog Numbers: S80073Synonyms: Peppermint CamphorCompany Identification:Fisher Scientific1 Reagent LaneFair Lawn, NJ 07410For information, call: 201-796-7100Emergency Number: 201-796-7100For CHEMTREC assistance, call: 800-424-9300For International CHEMTREC assistance, call: 703-527-3887Section 2 - Composition, Information on IngredientsCAS#Chemical Name Percent EINECS/ELINCS 15356-70-4Dl-menthol>99239-388-3Hazard Symbols: None listed.Risk Phrases: None listed.Section 3 - Hazards IdentificationEMERGENCY OVERVIEWAppearance: white. Caution! Sensitizer. May cause eye and skin irritation. May cause respiratory and digestive tract irritation. May cause allergic respiratory reaction. May cause allergic skin reaction. The toxicological properties of this material have not been fully investigated.Target Organs: None.Potential Health EffectsEye: May cause severe eye irritation.Skin: May cause skin irritation. May cause skin sensitization, an allergic reaction, which becomes evident upon re-exposure to this material.Ingestion: May cause irritation of the digestive tract. The toxicological properties of this substance have not been fully investigated. May cause allergic reactions (urticaria). Inhalation: May cause respiratory tract irritation. May cause methemoglobinemia, cyanosis, convulsions, tachycardia, dyspnea (labored breathing), and death. The toxicological properties ofthis substance have not been fully investigated.Chronic: Not available.Section 4 - First Aid MeasuresEyes: Immediately flush eyes with plenty of water for at least 15 minutes, occasionally lifting the upper and lower eyelids. Get medical aid immediately.Skin: Get medical aid. Immediately flush skin with plenty of soap and water for at least 15 minutes while removing contaminated clothing and shoes.Ingestion: If victim is conscious and alert, give 2-4 cupfuls of milk or water. Get medical aid immediately.Inhalation: Remove from exposure to fresh air immediately. If not breathing, give artificial respiration. If breathing is difficult, give oxygen. Get medical aid.Notes to Physician: No specific antidote exists. Treat symptomatically and supportively.Section 5 - Fire Fighting MeasuresGeneral Information: As in any fire, wear a self-contained breathing apparatus inpressure-demand, MSHA/NIOSH (approved or equivalent), and full protective gear. Combustion generates toxic fumes.Extinguishing Media: For small fires, use water spray, dry chemical, carbon dioxide or chemical foam.Section 6 - Accidental Release MeasuresGeneral Information: Use proper personal protective equipment as indicated in Section 8. Spills/Leaks: Sweep up or absorb material, then place into a suitable clean, dry, closed container for disposal. Avoid generating dusty conditions.Section 7 - Handling and StorageHandling: Wash thoroughly after handling. Remove contaminated clothing and wash before reuse. Use with adequate ventilation. Minimize dust generation and accumulation. Avoid contact with skin and eyes. Avoid ingestion and inhalation.Storage: Store in a cool, dry, well-ventilated area away from incompatible substances.Section 8 - Exposure Controls, Personal ProtectionEngineering Controls: Use adequate ventilation to keep airborne concentrations low. Exposure LimitsChemical Name ACGIH NIOSH OSHA - Final PELs Dl-menthol none listed none listed none listed OSHA Vacated PELs: Dl-menthol: No OSHA Vacated PELs are listed for this chemical.Personal Protective EquipmentEyes: Wear appropriate protective eyeglasses or chemical safety goggles as described by OSHA's eye and face protection regulations in 29 CFR 1910.133 or European Standard EN166.Skin: Wear appropriate gloves to prevent skin exposure.Clothing: Wear appropriate protective clothing to prevent skin exposure.Respirators: Follow the OSHA respirator regulations found in 29CFR 1910.134 or European Standard EN 149. Always use a NIOSH or European Standard EN 149 approved respirator when necessary.Section 9 - Physical and Chemical PropertiesPhysical State: SolidAppearance: whiteOdor: none reportedpH: Not available.Vapor Pressure: Not applicable.Vapor Density: Not available.Evaporation Rate:Not applicable.Viscosity: Not available.Boiling Point: 216 deg CFreezing/Melting Point:> 28 deg CAutoignition Temperature: Not applicable.Flash Point: Not applicable.Decomposition Temperature:Not available.NFPA Rating: Not published.Explosion Limits, Lower:Not available.Upper: Not available.Solubility: Not available.Specific Gravity/Density:0.89 (water=1)Molecular Formula:C10H20OMolecular Weight:156.1394Section 10 - Stability and ReactivityChemical Stability: Stable at room temperature in closed containers under normal storage and handling conditions.Conditions to Avoid: High temperatures, incompatible materials.Incompatibilities with Other Materials: Strong oxidizers.Hazardous Decomposition Products: Carbon monoxide, carbon dioxide.Hazardous Polymerization: Has not been reportedSection 11 - Toxicological InformationRTECS#:CAS# 15356-70-4: OT0525000LD50/LC50:CAS# 15356-70-4:Draize test, rabbit, skin: 500 mg/24H Mild;Oral, mouse: LD50 = 3100 mg/kg;Oral, rat: LD50 = 2900 mg/kg;Skin, rabbit: LD50 = >5 gm/kg;Carcinogenicity:CAS# 15356-70-4: Not listed by ACGIH, IARC, NIOSH, NTP, or OSHA.Epidemiology: No information available.Teratogenicity: No information available.Reproductive Effects: No information available.Neurotoxicity: No information available.Mutagenicity: Please refer to RTECS# OT0525000 for specific information.Other Studies: None.Section 12 - Ecological InformationEcotoxicity: No data available. No information available.Environmental: No information reported.Physical: No information available.Other: No information available.Section 13 - Disposal ConsiderationsChemical waste generators must determine whether a discarded chemical is classified as a hazardous waste. US EPA guidelines for the classification determination are listed in 40 CFR Parts 261.3. Additionally, waste generators must consult state and local hazardous waste regulations to ensure complete and accurate classification.RCRA P-Series: None listed.RCRA U-Series: None listed.Section 14 - Transport InformationUS DOT IATA RID/ADR IMO Canada TDGShipping Name:Noinformationavailable.No informationavailable.Hazard Class: UN Number: Packing Group:Section 15 - Regulatory InformationUS FEDERALTSCACAS# 15356-70-4 is not listed on the TSCA inventory. It is for research and development use only.Health & Safety Reporting ListNone of the chemicals are on the Health & Safety Reporting List.Chemical Test RulesNone of the chemicals in this product are under a Chemical Test Rule.Section 12bNone of the chemicals are listed under TSCA Section 12b.TSCA Significant New Use RuleNone of the chemicals in this material have a SNUR under TSCA.SARASection 302 (RQ)None of the chemicals in this material have an RQ.Section 302 (TPQ)None of the chemicals in this product have a TPQ.Section 313No chemicals are reportable under Section 313.Clean Air Act:This material does not contain any hazardous air pollutants. This material does not contain any Class 1 Ozone depletors. This material does not contain any Class 2 Ozone depletors.Clean Water Act:None of the chemicals in this product are listed as Hazardous Substances under the CWA. None of the chemicals in this product are listed as Priority Pollutants under the CWA. None of the chemicals in this product are listed as Toxic Pollutants under the CWA.OSHA:None of the chemicals in this product are considered highly hazardous by OSHA.STATECAS# 15356-70-4 is not present on state lists from CA, PA, MN, MA, FL, or NJ.California No Significant Risk Level: None of the chemicals in this product are listed. European/International RegulationsEuropean Labeling in Accordance with EC DirectivesHazard Symbols:Not available.Risk Phrases:Safety Phrases:WGK (Water Danger/Protection)CAS# 15356-70-4: 1CanadaCAS# 15356-70-4 is listed on Canada's DSL List. CAS# 15356-70-4 is listed on Canada's DSL List.This product has a WHMIS classification of D2B.CAS# 15356-70-4 is not listed on Canada's Ingredient Disclosure List.Exposure LimitsSection 16 - Additional InformationMSDS Creation Date: 12/12/1997Revision #1 Date: 8/02/2000The information above is believed to be accurate and represents the best information currently available to us. However, we make no warranty of merchantability or any other warranty, express or implied, with respect to such information, and we assume no liability resulting from its use. Users should make their own investigations to determine the suitability of the information for their particular purposes. In no event shall Fisher be liable for any claims, losses, or damages of any third party or for lost profits or any special, indirect, incidental, consequential or exemplary damages, howsoever arising, even if Fisher has been advised of the possibility of such damages.。
医学肿瘤细胞病理图像自动分类中深度学习的应用-肿瘤学论文-临床医学论文-医学论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——摘要:近年来, 大数据环境下幂级式增长的海量训练样本为癌症的诊断带来了数据资源, 同时互联网的发展促进了深度学习开源框架的应用水平, 推动了图像数据的精细化自动分类进入深度挖掘阶段。
基于深度学习量化的核特征和派生特征可解决肿瘤细胞样本分类问题, 因此肿瘤细胞病理学的研究为癌症的早期筛查和准确诊断提供条件。
如何学习出更高层次的可视化特征网络模型, 以及如何习得快速高效特异性强的新学习方法, 需要高判别性、高稳定性及较好鲁棒性的肿瘤细胞自动分类学习算法应于临床诊断治疗中。
关键词:深度学习; 精细化; 自动分类; 可视化特征; 肿瘤细胞;癌症是全球第三大死因, 已成为公众聚焦的健康问题, 在中国是首要死因。
癌症的早期筛查和准确诊断是极为重要的。
据2015年统计, 中国有429.2万例新发病例, 281.4万例病例[1]。
癌的种类居多, 如胃癌、肺癌、恶性肿瘤、肠癌、皮肤癌、前列腺癌等。
肿瘤细胞病理学理论根据肿瘤的形态学和生物学行为, 肿瘤类型大致分为良性、恶性和交界性这三类。
量化的病理特征可解决细胞样本分类问题, 同时能够辅助医生实现病理诊断[2], 因此从细胞这一层次分析预测是可行的。
在整个病情诊断过程中, 医学图像信息的获取和有效处理是最关键的步骤。
信息论认知中强调没有预处理是的预处理。
深度学习避免了传统机器学习算法中所需的复杂预处理过程, 依据端到端模型, 可直接从训练数据出发自动学习抽象知识。
现阶段, 足够的医学资源存在不可用问题, 如何更好地发掘、利用好有限病理图像数据本身的价值成为一个迫切需要解决的问题。
深度学习中有效的医学图像特征提取能够降低对分类算法的依赖性, 同时制约着整个分类器的性能。
因此, 基于深度学习的医学肿瘤细胞病理图像的自动分类[3]成为解决问题的有效举措。
图像分割技术在生物医学中的应用Chapter 1: IntroductionImage segmentation is an important technique in the field of computer vision that involves dividing an image into different regions or segments in order to analyze it. It is widely used in various industries, including healthcare. In the biomedical field, image segmentation plays a crucial role in diagnosing diseases, monitoring disease progression, and developing new treatments.Chapter 2: Applications of Image Segmentation in Biomedical Science2.1 Medical ImagingMedical imaging plays an important role in the diagnosis and treatment of diseases. There are various imaging modalities, including CT, MRI, PET, and ultrasound. Image segmentation is often used to analyze medical images in order to extract diagnostic information. For example, in CT scans, segmentation is used to identify and quantify the size of tumors, while in MRI, segmentation is used to detect and monitor brain lesions.2.2 PathologyImage segmentation is also used in pathological analysis to distinguish different types of cells and tissues. By segmenting histological images, it is possible to analyze the different structurespresent in the tissue sample. It can also be used to quantify the expression of specific markers or proteins in tissues.2.3 Drug DiscoveryImage segmentation has been used in drug discovery to identify new drug targets. By segmenting cells, it is possible to analyze their morphology and identify changes in shape and size that may indicate the presence of specific proteins or other biomolecules. This information can be used to develop new drugs or drug delivery systems.Chapter 3: Techniques Used in Image Segmentation3.1 ThresholdingThresholding is a commonly used technique in image segmentation. It involves setting a threshold value, which separates the pixels that belong to the foreground from the pixels that belong to the background. Thresholding can be used to segment an image based on the intensity or color of the pixels.3.2 Region-based SegmentationRegion-based segmentation involves dividing an image into regions based on some features like colors or textures. It is a useful technique when thresholding is not sufficient, for example, when the foreground and background have similar intensities.3.3 Edge-based SegmentationEdge-based segmentation is a technique that detects edges in an image and segments them based on the edge information. It is often used for images with sharp edges or contours.Chapter 4: Challenges in Image Segmentation in Biomedical ApplicationsImage segmentation in biomedical applications is often challenging due to the complex nature of biological images. There are many factors that can affect the quality of the segmentation, including noise, artifacts, and variability in the image.4.1 NoiseBiomedical images are often noisy, making it difficult to accurately identify the boundaries of objects. Noise reduction techniques can be applied to improve the segmentation results.4.2 ArtifactsArtifacts can occur during the image acquisition process and can interfere with the segmentation process. Segmentation algorithms should be robust to handle artifacts.4.3 VariabilityBiological tissues and structures can vary greatly between patients, making it difficult to develop segmentation algorithms that can be applied universally. Adaptive techniques should be used that can adjust to the variation in images.Chapter 5: ConclusionIn conclusion, image segmentation is an important technique in biomedical science that plays a crucial role in disease diagnosis, monitoring, and drug discovery. There are numerous challenges in image segmentation in biomedical applications, but with the development of advanced techniques, we can achieve more accurate and reliable results. The continued advancement of image segmentation technology holds great promise for improving the understanding and treatment of diseases in the future.。
基于深度学习的纹理布匹瑕疵检测方法许玉格 1钟 铭 1吴宗泽 2, 3任志刚 4刘伟生5摘 要 布匹瑕疵检测是纺织工业中产品质量评估的关键环节, 实现快速、准确、高效的布匹瑕疵检测对于提升纺织工业的产能具有重要意义. 在实际布匹生产过程中, 布匹瑕疵在形状、大小及数量分布上存在不平衡问题, 且纹理布匹复杂的纹理信息会掩盖瑕疵的特征, 加大布匹瑕疵检测难度. 本文提出基于深度卷积神经网络的分类不平衡纹理布匹瑕疵检测方法(Detecting defects in imbalanced texture fabric based on deep convolutional neural network, ITF-DCNN), 首先建立一种基于通道叠加的ResNet50卷积神经网络模型(ResNet50+)对布匹瑕疵特征进行优化提取; 其次提出一种冗余特征过滤的特征金字塔网络(Filter-feature pyramid network, F-FPN)对特征图中的背景特征进行过滤, 增强其中瑕疵特征的语义信息; 最后构造针对瑕疵数量进行加权的MFL (Multi focal loss)损失函数, 减轻数据集不平衡对模型的影响, 降低模型对于少数类瑕疵的不敏感性. 通过实验对比, 提出的方法能有效提升布匹瑕疵检测的准确率及定位精度, 同时降低了布匹瑕疵检测的误检率和漏检率, 明显优于当前主流的布匹瑕疵检测算法.关键词 布匹瑕疵检测, 深度学习, 特征过滤, 深度卷积神经网络, 不平衡分类引用格式 许玉格, 钟铭, 吴宗泽, 任志刚, 刘伟生. 基于深度学习的纹理布匹瑕疵检测方法. 自动化学报, 2023, 49(4):857−871DOI 10.16383/j.aas.c200148Detection of Detecting Textured Fabric Defects Based on Deep LearningXU Yu-Ge 1 ZHONG Ming 1 WU Zong-Ze 2, 3 REN Zhi-Gang 4 LIU Wei-Sheng 5Abstract Fabric defect detection is a key part of product quality assessment in the textile industry. Achieving fast,accurate and efficient fabric defect detection is of great significance for improving the productivity of the textile in-dustry. In the production process of fabric, imbalance exists in the shape, size and quantity distribution of fabric de-fects, and the complex texture information of the jacquard fabric will cover the characteristics of the defect, which makes it difficult to detect fabric defects. This paper proposes a method for detecting defects in imbalanced texture fabric based on deep convolutional neural network (ITF-DCNN). First, an improved ResNet50 convolutional neural network model (ResNet50+) based on channel concatenate is established to optimize the fabric defect features.Second, F-FPN (filter-feature pyramid network) method for filtering redundant feature is proposed to filter the background features in the feature maps and enhance the semantic information of defect features. Finally, a MFL (multi focal loss) function weighted with the number of defects is construct to reduce the impact of imbalance on the model, and reduce the model 's insensitivity to a small number of defects. Experiments shows the proposed method effectively improves the accuracy of fabric defect detection and the accuracy of defect positioning, while re-ducing the false detection rate and missed detection rate of defect detection, which is significantly higher than the mainstream fabric defect detection algorithm.Key words Fabric defect detection, deep learning, feature filtering, deep convolutional neural network (DCNN),imbalance classificationCitation Xu Yu-Ge, Zhong Ming, Wu Zong-Ze, Ren Zhi-Gang, Liu Wei-Sheng. Detection of detecting textured fabric defects based on deep learning. Acta Automatica Sinica , 2023, 49(4): 857−871随着人工智能的发展, 相关技术的不断成熟,人工智能的应用领域不断扩展, 以深度卷积神经网收稿日期 2020-03-20 录用日期 2020-06-19Manuscript received March 20, 2020; accepted June 19, 2020国家自然科学基金(61703114, 61673126, U1701261, 51675108)资助Supported by National Natural Science Foundation of China (61703114, 61673126, U1701261, 51675108)本文责任编委 刘青山Recommended by Associate Editor LIU Qing-Shan1. 华南理工大学自动化科学与工程学院 广州 5100062. 深圳大学机电与控制工程学院 深圳 5180003. 人工智能与数字经济广东省实验室(深圳) 深圳5180004. 广东省离散制造知识自动化工程技术研究中心 广州 5100065. 深圳禾思众成科技有限公司 深圳 5180001. School of Automation Science and Engineering, South China University of Technology, Guangzhou 5100062. School of Elec-tromechanical and Control Engineering, Shenzhen University,Shenzhen 5180003. Guangdong Provincial Laboratory of Arti-ficial Intelligence and Digital Economy (Shenzhen), Shenzhen 5180004. Guangdong Discrete Manufacturing Knowledge Automation Engineering Technology Research Center, Guang-zhou 5100065. Shenzhen Hesi Zhongcheng Technology Co.,Ltd., Shenzhen 518000第 49 卷 第 4 期自 动 化 学 报Vol. 49, No. 42023 年 4 月ACTA AUTOMATICA SINICAApril, 20230.18∼络(Deep convolutional neural network, DCNN),为代表的深度学习方法在大量的工业界实际应用场景中展示了优于传统方法的性能[1]. 在布匹瑕疵检测领域中, 传统的瑕疵检测手段主要是采用人工检测的方式, 这种方式要求检测工人站在流水线旁边使用人眼检测布匹瑕疵, 该方法存在诸多缺陷, 如检测效率低下, 检测速度仅仅达到 0.36 m/s [2],漏检率高, 瑕疵检出率只有70%左右[3], 检测效率随工作时长而下降等. 基于此, 研究自动化的检测系统取代人工检测在纺织工业中有着重要的意义.目前的布匹瑕疵自动化检测的算法主要可分为三大类[4]: 基于统计的方法[5−6]、基于频谱的方法[3, 7−9]和基于模型的方法[10−12]. 统计法通过对布匹瑕疵图片中的纹理特征进行统计分析, 判断输入图片有无瑕疵, 该方法目前只在分辨率较小的瑕疵图片中有所应用, 且其对瑕疵的位置计算不准确. 频谱法是在实际布匹瑕疵检测中使用较多的一类方法, 该方法将图片特征从空间域转换到频率域中, 在频率域中图片特征将得到增强, 由此完成布匹瑕疵的分类,但是该方法目前只能实现对输入图片有无瑕疵的判断, 无法定位瑕疵的位置. 模型法通过假设布匹图片纹理由规则纹理和随机纹理组成, 使用随机过程建模方法对图片特征进行描述从而完成分类, 但是该方法只在少量样本中取得好效果, 对于实际工业生产中大量样本的情况, 尚未有研究表明其可行性. 基于上述方法进行的研究对布匹瑕疵缺陷检测问题有很好的借鉴作用, 但是其研究往往局限于小规模的小分辨率布匹瑕疵图片数据集, 因此参考价值有限. 综上所述, 传统方法存在着瑕疵分割性能差、错检率高、噪声敏感等问题, 随着深度学习的发展, 采用卷积神经网络解决布匹瑕疵检测问题是当前研究的热点之一.基于深度卷积神经网络的方法在目前取得了极大的进展. 2012年Krizhevsky 等[13]提出的Alex-Net, 突破了大规模的视觉识别挑战赛(ImageNet large scale visual recognition challenge, ILSVRC)中的图片分类准确度记录. 2015年Simonyan 等[14]提出VGG (Visual geometry group)系列模型, 该模型通过深层卷积神经网络对图片特征进行提取,最后使用全连接层进行分类, 在当年的ILSVRC 上取得了巨大成功. 随后Google 提出InceptionNet [15−18]系列模型, 该模型通过对网络结构的精心设计, 从而在减小模型参数量的同时提升了模型的表达能力. 2016年He 等[19]提出ResNet, 通过引入残差模块, 解决了梯度消失的问题, 大大加深了网络的深度. 2017年Huang 等[20]提出DenseNet, 其采用密集块(Dense block)对每层的特征图进行复用, 加强网络中特征的传递, 提高网络表现的同时减少网络的参数量. 在此之后, 对网络结构的改进算法大量涌现, 如特征金字塔网络(Feature pyramid net-works, FPN), Cascade R-CNN, BiFPN 等[21−23]. 对网络结构的不断改进, 使得DCNN 在目标检测领域中的应用不断成熟, 已有大量算法实际应用于工业检测系统中[24−29]. 与此同时对于损失函数的改进,如FL (Focal loss)[30]和IOU loss [31]等进一步增强了深度学习模型在检测任务中的表现.基于以上工作基础, 本文提出一种基于深度卷积神经网络的分类不平衡纹理布匹瑕疵检测方法(Detecting defects in imbalanced texture fabric based on deep convolutional neural network, ITF-DCNN), 来解决布匹瑕疵检测中提取到的图片特征难以用于准确的瑕疵检测以及检测模型训练过程中瑕疵样本不平衡的问题. 本文的主要贡献在以下几方面: 1)针对原始的ResNet 中残差模块会造成信息流失, 导致特征图对瑕疵特征表达能力不足的问题, 提出了使用特征通道叠加后采用卷积融合的方式对残差模块进行改进; 2)为充分利用数据集中已有的布匹模板图片, 构造特征过滤金字塔网络(Filter-feature pyramid network, F-FPN), 通过布匹模板图片对布匹瑕疵图片中的冗余背景特征进行过滤;3)基于数据集中各类瑕疵样本分布存在着极度不平衡的问题, 提出改进的损失函数 MFL (Multi fo-cal loss)来解决模型对于少数类瑕疵样本检测准确率不高的问题.本文的组织架构如下: 第1节对布匹瑕疵检测的相关工作进行介绍. 第2节对布匹瑕疵检测中的问题进行描述, 阐明检测模型难以取得精确检测结果的原因. 在第3节中介绍本文采用的布匹瑕疵检测模型, 包括其中特征提取网络的构造, 特征过滤网络的建立, 以及数据集不平衡的解决方案. 第4节将基于构建的布匹数据集进行实验分析, 验证本文提出的模型在布匹瑕疵缺陷检测任务中的有效性, 同时为证明各改进结构对模型性能的提升, 将基于各改进结构进行单独的纵向对比实验. 第5节对全文的工作进行总结和展望.1 研究现状在瑕疵检测领域中, 被检测物体可分为有纹理材料和无纹理材料[2], 布匹作为一种典型的有纹理材料, 其瑕疵检测问题引起了大量专家学者的关注,目前针对布匹瑕疵检测过程中存在的布匹材料变形、背景问题复杂、类内瑕疵多样性大和类间瑕疵极度相似等问题, 已有许多方法尝试对其进行解决[32−36].2017年, Li 等[37]针对纹理变形的布匹瑕疵检测问题, 提出了一种基于Fisher 标准的深度学习方法,该方法首先构造一个基于Fisher 准则的堆叠式自动降噪编码器(Stacked denoise auto-encoder858自 动 化 学 报49 卷based on Fisher criterion, FCSDA), 然后将布匹图片分割成等大小的若干份, 分割后的瑕疵图片和无瑕疵图片都将参与FCSDA的训练, 编码器训练完成后, 将待检测图片分割成同样大小的若干份进行预测, 最后通过结合重建后图片与缺陷之间的残差和预先设定的阈值来对缺陷进行定位, 该方法虽然可以完成纹理图片的瑕疵检测, 但是检测前需要将图片进行分割, 且训练过程过于繁琐. 2019年, Jing等[38]提出一种基于卷积神经网络的纹理布匹瑕疵检测方法PTPI (Patches training and image testing), 该方法首先通过距离匹配函数计算出训练时对瑕疵进行分割的最佳尺寸, 随后利用该尺寸将样本图片中的瑕疵逐一分割出来并进行标注, 再将构建好的卷积神经网络模型在手写数字数据集上进行预训练,预训练完成后利用分割后的数据集进行学习, 最后模型在测试图片上进行滑动, 从而完成瑕疵检测.此方法的关键在于分割时尺寸的计算, 要求设计出的尺寸既能够使得分割后的图片完全具有缺陷的特征, 又不能包含太多的背景像素. 对于瑕疵尺寸变化不大的情况, 该方法能取得较好的检测效果, 但是该方法并没有对网络模型进行优化, 无法适应瑕疵分布复杂的情况. Raheja等[39]通过灰度共生矩阵对布匹图片特征进行提取, 辅以滑窗技术计算出待检测图片的纹理信息, 之后将所得信息和参考阈值进行对比, 若纹理信息超出阈值范围则认定为瑕疵图片, 该方法简单易行计算量小, 可在嵌入式数字信号处理器(Digital signal processor, DSP)系统中实现, 但是该方法依赖于手工设计的特征, 实际检测过程中可能会有很多有效信息流失. 此外, Tao等[40]提出使用一种两阶段的方法进行物体表面瑕疵的检测, 首先使用一种级联的自动编码器来对输入图片的每个像素进行预测, 随后只需再确定一个阈值便可实现对缺陷的分割. 该方法为Tao的团队首次提出[40], 在提取出缺陷部位后使用一个CNN模型对缺陷进行分类, 该方法能够实现对瑕疵特征的准确提取, 检测准确率高, 然而要求数据集具有缺陷的掩膜标注信息, 大部分缺陷检测的应用场景难以满足该要求, 且分割模型和分类模型要单独训练, 无法端到端的进行, 过程稍显繁复. He 等[41]使用卷积自动编码器和半监督的生成对抗网络组合来对缺陷进行检测, 该方法首先利用大量的无标签样本训练一个卷积自动编码器, 随后利用该编码器用于特征提取, 将提取到的特征输入到soft-max层进行分类, 最后结合半监督式生成对抗网络(Semi-supervised generative adversarial network, SGAN)模型提升网络的泛化性. 这种半监督的方式可以改善标签样本较少的情况下模型的分类性能, 但是对于样本类别不平衡的问题并没有进行考量. Arikan等[42] 提出一种基于卷积神经网络的方法对物体表面的瑕疵进行实时识别, 该卷积网络通过大卷积核以及跳级连接尽可能多地准确获取缺陷的信息, 且使用了一种新的数据增强方法, 并通过实验验证了该方法的有效性. 文献[42]的方法能够满足检测的实时性要求, 单张图片的检测时间仅为1.9 ms, 但是构造的卷积网络比较精简, 并不适用于背景复杂的样本.2 布匹瑕疵检测问题描述布匹瑕疵检测的自动化是一个集布匹瑕疵特征提取, 瑕疵分类和瑕疵定位的多任务过程. 具体来说, 检测算法要实现3个方面的功能: 1)判断输入的布匹图片有无瑕疵; 2)对有瑕疵布匹图片中的瑕疵进行定位; 3)对定位出来的布匹瑕疵进行分类.常见的布匹瑕疵样本如图1所示, 其主要存在以下3个特征: 1)布匹表面包含大量的花色, 且花色种类繁多, 同时其分布不具有规律性, 造成布匹图片纹理信息复杂, 瑕疵特征提取困难; 2)布匹中的一些瑕疵特征极其相似, 难以用肉眼进行判别, 如图中的“虫粘”类瑕疵和“破洞”类瑕疵; 3)布匹中的各类瑕疵形状各不相同, 尺寸跨度极大, 其形状分布如图2所示. 除此之外, 纹理布匹瑕疵检测还存在着大量其他问题, 如在纹理布匹瑕疵检测问题中,由于图片背景的复杂性, 为降低瑕疵检测的难度,通常会采用图片分割的手段, 得到分辨率较小的图片后再进行检测, 但是这无疑会加大瑕疵检测的工作量, 从而影响检测的速度, 且大部分经典的检测方法仅支持检测单张图片中只存在单个瑕疵的情形,对于单张图片中存在多个不同种类瑕疵的情况仍不能很好的判别. 此外目前大部分基于深度学习进行布匹瑕疵检测的相关工作中, 仅仅给出了对布匹图片是否含有瑕疵的判断结果, 并未对有瑕疵图片中含有沾污网折破洞虫粘花毛其他正常蜡斑图 1 纹理布匹瑕疵样本图片Fig. 1 Samples of jacquard fabric defects4 期许玉格等: 基于深度学习的纹理布匹瑕疵检测方法859的瑕疵进行具体的分类, 或者仅实现对易于检测的瑕疵类别的判断. 而对于布匹瑕疵数据集内各类样本的数量不均衡, 从而导致模型对于少数类样本的检测性能较差的问题, 目前尚未有文献对其进行研究.正是由于布匹瑕疵数据集的这些特性, 使得人工检测及传统的瑕疵检测方案难以达到理想的检测效果, 因此本文在对ResNet, Cascade R-CNN,FPN 等模型研究的基础之上, 提出一种基于深度卷积神经网络的纹理布匹瑕疵检测方法, 针对大分辨率的纹理布匹进行自动的瑕疵特征提取, 并将经过预处理后的瑕疵特征图输入到分类模型和回归模型中, 实现纹理布匹的瑕疵检测.3 布匹瑕疵检测模型构建考虑到布匹瑕疵检测算法对精度与速度的要求, 本文采用的特征提取网络框架为基于ResNet50改进后的ResNet50+. 利用ResNet50+ 对输入的布匹瑕疵图片进行特征的提取, 同时选用提取过程中产生的第2 ~ 6阶段的特征图构建F-FPN 网络模型. F-FPN 网络模型将对不同层级的特征图进行融合, 增强底层特征图的语义信息, 同时利用模板特征图对瑕疵特征图中的复杂背景信息进行过滤, 随后得到的特征图经由区域候选网络(Region proposal network, RPN)提取到约2 000个候选框, 将得到的2 000个候选框进行感兴趣区域 (Region of in-terest, ROI)池化得到输出大小一致的候选框. 在此基础上使用级联的分类器和回归器对候选框进行分类和回归, 提升检测模型对瑕疵的定位精度. 模C i B i i =123型的整体结构如图3所示, 其中 “FC” 代表全连接层,“ ”,“ ”, , , 分别代表分类网络和回归网络.x /像素x /像素x /像素x /像素x /像素x /像素x /像素y /像素y /像素y /像素y /像素y /像素y /像素图 2 纹理布匹瑕疵形状分布Fig. 2 Shape distribution of jacquard fabric defects瑕疵图片模板图片特征提取网络F-FPN 网络结构第 1 阶段预测C 1RPNROI FCB 1ROIFC B 2C 2ROIFC B 3C 3第 2 阶段预测第 3 阶段预测图 3 ITF-DCNN 模型的整体结构图Fig. 3 Structure of proposed model860自 动 化 学 报49 卷3.1 基于通道叠加的特征提取网络ResNet50+7×7本文采用的特征提取网络的原型为ResNet50,其网络结构如图4所示. 该网络可分为5个阶段,第1个阶段由卷积层、批归一化(Batch normaliza-tion, BN)层、ReLU 激活层和 的池化层构成,其后的4个阶段都可视为由Identity block 和Conv block 组成的残差模块级联构成. 在原始的ResNet50中, Conv block 的结构如图5(a)所示,特征图输入后经过两个通道, 相减后输出, 在该过程中使用的ReLU 激活函数如式(1)所示:1×1之后经过一个卷积核为 , stride = 2的卷积层,输出后的特征图大小为Conv 特征图第 1阶段第 2 阶段第 3 阶段第 4 阶段第 5 阶段BN ReLU PoolingIdentity blockConv block图 4 ResNet50网络结构图Fig. 4 Model structure of ResNet50(a) 原始的 Conv block (a) Original Conv block (b) 改进的 Conv block (b) Modified Conv block (c) 原始的 Identity block (c) Original Identity block (d) 改进的 Identity block (d) Modified Identity block输入图 5 残差模块Fig. 5 Model structure of residual block4 期许玉格等: 基于深度学习的纹理布匹瑕疵检测方法861(W i ,H i )(W o ,H o )3/43×31×13×3 表示输入特征图的长宽, 表示输出特征图的长宽, 卷积核的步长为2, 卷积核尺寸为1将导致最多达 的信息流失. 为避免这个问题, 本文对Conv block 的结构进行改进, 将其中的下采样卷积层后移, 并把 的卷积核的stride 设置为2来达到下采样的目的, 同时将shortcut 中的 卷积核替换成 卷积核, 改进后的Conv block 结构如图5(b)所示. 与此同时, ResNet50采用级联的Identity block 模块来代替原本的卷积层,Identity block 模块的引入可以解决随着网络模型的加深而出现的梯度消失问题. 原始的Identity block 模块如图5(c)所示, 输入经过两通道后相加,再进入ReLU 做一个非线性激活, 这导致Identity block 的输出只能为正数, 极大制约模型的表达能力. 因此, 本文采用如图5(d)所示的改进结构, 将ReLU 层移到通道内部, 且特征图直接相加替换为两通道特征图叠加后使用卷积核来进行残差的提取, 从而提升模型对瑕疵特征的表达能力.3.2 冗余特征过滤网络F-FPNC in ={C in l 1,C in l 2,···,C in l n }C in l ii P out =f (C in )C in ={C in 2,C in 3,···,C in 6}1/2i 1×1在深度卷积神经网络中, 进行多尺度特征融合目的在于将不同分辨率的特征信息结合起来, 弥补高分辨率的特征图语义信息低的弱点. 给定输入特征层 , 其中, 代表第 层的输入特征层, 融合的实质是找到一种由输入特征层到输出特征层的映射关系, 该过程可表示为:. 在传统的特征金字塔网络中, 取每张输入图片的5个特征层 ,每个特征层的分辨率为输入特征图尺寸的 , 各个特征层经过一个 卷积层后将通道数进行统一, 最后采用一种自上而下的融合方式进行融合,该过程具体可见图6(a).2×其中, “ ” 表示进行两倍的上采样. 在布匹瑕疵检测中, 由于布匹图片存在大量的纹理特征,造成背景复杂, 使用传统的FPN 卷积网络生成瑕疵图片的特征图, 容易提取出大量的冗余特征, 增大瑕疵检测的难度. 为解决特征图中存在的特征冗余问题, 可使用特征过滤的方法, 消除无关特征对检测模型的影响. 一种简单的特征过滤方式是将瑕疵布匹图片像素值减去模板图片(模板图片中不含瑕疵, 但是包含对应的复杂背景信息)的像素均值,从而在一定程度上消除背景的影响, 即avg (p t )p d (i,j )p t (i,j )i <m,j <n m ×n 其中, 表示模板图片的像素均值, , 分别表示瑕疵图片和模板图片第i 行第j 列的像素值, 且满足 , 表示图片的分辨率. 但是该方法没有考虑纹理在布匹图片中的空间分布差异, 对于纹理单一的布匹图片可以取得较好的效果, 当布匹图片的纹理较复杂时, 往往难以奏效. 使用深度卷积神经网络对布匹图片进行卷积, 可以提取布匹图片一定空间范围内的特征, 进行多次重复卷积, 可以获取高语义信息的特征, 即在一定程度上消除布匹的纹理特征在空间分布上的差异. 因此使用卷积网络对瑕疵布匹图片和模板图片分别进行特征提取, 为缓解瑕疵图片和模板图片在纹理信息上的差异性, 将输入到网络中的模板图片进行随机1 ~ 10个像素上的抖动, 使得瑕疵图片和模板图片对齐, 得到相关特征图后, 利用模板图FPN 中瑕疵图片输入特征图FPN 中瑕疵图片输出特征图(a) 原始的 FPN (a) Original FPN (b) 加性过滤的 FPN (b) Added filtered FPN (c) 卷积过滤的 FPN(c) Convolutional filtered FPNFPN 中模板图片输入特征图加性过滤后的特征图卷积过滤后的特征图元素相加通道相加图 6 特征图过滤方式Fig. 6 Methods to filtering feature maps862自 动 化 学 报49 卷片特征对瑕疵布匹图片特征进行冗余特征过滤. 基于此, 本文结合FPN 网络提出两种过滤的方式.O i =I i d +I i t O i I i d I it i 1)加性过滤: , 其中, 代表过滤后的输出特征图, 和 分别代表瑕疵布匹图片和模板图片的特征图, 代表特征图的通道数. 该过滤方式直接对应特征图中的各个特征进行操作, 并不改变特征图的维数, 但是可以增强每一维特征中瑕疵的语义信息, 过程具体可见图6(b). 加性过滤方式直接对特征图中的每一维特征进行相加, 并没有考虑每一维特征在输出特征图中应当占据的权重,这可能导致某些对检测有益的特征语义信息反而减弱, 基于此提出了卷积过滤.O i =concatenate (I i d,I i t )∗K i concatenate (I i d ,I i t )I i d ,I it∗K i 1×11×12)卷积过滤: , 其中 表示对 的特征图进行叠加, “ ” 表示卷积操作, 表示 卷积核. 该过滤方式通过 卷积核的引入, 使得网络可以自适应的对不同的特征信息进行加权求和, 避免了有效瑕疵特征语义信息的流失, 其具体过程如图6(c)所示.3.3 MFL 损失函数47:1在布匹瑕疵检测中, 不同种类的瑕疵在数量上分布极不平衡, 其中最常见的瑕疵为“沾污”, 数量最少的瑕疵为“其他”, 两者的不平衡比例高达. 瑕疵种类的不平衡性对于模型的检测效果会产生较大影响, 模型对于样本数量更多的瑕疵能取得更好的检测效果, 而对于样本数量较少的瑕疵,由于难以学得较好的特征表达, 使得模型对该类瑕疵的检测准确率不高, 定位精度较差.为缓解模型中参与训练的正负样本不平衡问题, 体现不同样本的难易分程度, Lin 等[30]在2017年提出了Focal loss 损失函数:p αt γαt γ其中, 表示对anchor 的预测置信度, 该损失函数针对正负类anchors 不均衡及不同anchors 的难易分程度进行特殊处理, 在损失函数中 被当作平衡正负类anchors 的加权系数, 同时可通过 值来调节难分anchors 在总损失中的占比, 在一定程度上解决样本不平衡的问题. 但是Focal loss 并没有考虑到数据集中各类样本的不平衡度, 仅仅依靠人工对参数的调节, 往往难以把控模型学习的方向, 最终导致模型的检测性能过于依赖参数 和 的选取, 想要依靠Focal loss 训练得到性能优良的检测模型, 往往需要花费大量的时间在超参数的调整上.为适应多分类不平衡数据集, 同时优化超参数αt βc βc βc 的选取, 本文结合Focal loss 提出了改进的MFL 损失函数. 为使该损失函数可对不同类别的瑕疵进行加权, 将原本的二分类加权系数 移除, 并添加多类样本加权系数, 可针对不同瑕疵样本在数据集中的占比自动调整, 从而控制对应样本在损失函数中所占据的比重. 本文提出的 计算方式为ωN c c βc 其中, 表示平衡系数, 表示类别为 的样本数量. 的引入使得数据集中的每个大类样本的损失在总损失中所占的比例相对较小, 防止数据集的极度不平衡性导致大类样本完全主导梯度更新方向的情况发生. 改进后的损失函数可表示为p t 其中, 的取值如式(5)所示.4 实验分析4.1 数据集构建及实验设置4096×1810本文所采用的数据集来自广东省某纺织企业,数据集共包含有瑕疵图片2 259幅, 模板图片68幅,模板图片中只含有背景纹理信息, 不包含瑕疵, 图片的分辨率为 像素, 在实验中, 将其中的2 015幅瑕疵图片划分为训练集, 剩下的244幅作为验证集. 在本数据集中包含7种布匹瑕疵, 分别为沾污、花毛、虫粘、破洞、蜡斑、网折和其他, 在训练过程中背景将单独作为一个类别参与训练, 因此实际是一个8分类的模型.2×2深度学习模型的训练需要大量的样本, 为达到理想的训练效果, 需对原始的数据集进行数据增强,本文采用的数据增强方法为: 1)对原始的瑕疵样本图片进行 的切割; 2)对切割后的数据集分别进行水平和垂直方向上的翻转. 数据增强后的样本量为原始数据集的8倍. 增强前后数据集中的样本分布如表1所示. 表1真实反映了数据集中的各类瑕疵在数量上存在极度不平衡问题, 其中“沾污”类瑕疵数量最多,“其他”类瑕疵数量最少, 这种类别失衡问题将导致模型在学习过程中梯度被多数类瑕疵主导, 使得模型对少数类瑕疵的检测性能较差.本文实验采用的计算机配置为Intel(R) Xeon (R) CPU E5-2650 v4 @ 2.20 GHz, NVIDA Ge-Force 1080TI GPU, 操作系统为Ubuntu18.04. 本实验的网络模型基于Pytorch 框架搭建, 实验中设置batch size 为2, 训练步数为600 000, 初始学习率为0.0025, 动量为0.9, 衰减系数设置为0.0001.实验可分为6部分, 第1部分为数据集增强前后模4 期许玉格等: 基于深度学习的纹理布匹瑕疵检测方法863。
英语生物分类学测试40题1. Which of the following is a mammal?A. BirdB. SnakeC. DogD. Fish答案:C。
狗是哺乳动物,具有哺乳动物的特征,如胎生、哺乳等。
选项 A 鸟属于鸟类,选项B 蛇属于爬行动物,选项D 鱼属于鱼类。
2. Insects belong to which phylum?A. ChordataB. ArthropodaC. MolluscaD. Echinodermata答案:B。
昆虫属于节肢动物门(Arthropoda),节肢动物具有分节的附肢等特征。
选项 A 脊索动物门包括脊椎动物,选项C 软体动物门如蜗牛等,选项D 棘皮动物门如海星等。
3. Which of the following is an amphibian?A. FrogB. LizardC. RabbitD. Tiger答案:A。
青蛙是两栖动物,其生活史包括水生和陆生阶段。
选项B 蜥蜴是爬行动物,选项C 兔子是哺乳动物,选项D 老虎是哺乳动物。
4. Plants are classified into different groups based on:A. Their sizeB. Their colorC. Their structure and reproduction methodsD. Their smell答案:C。
植物根据其结构和繁殖方式进行分类。
选项A 大小不是主要分类依据,选项B 颜色也不是,选项D 气味同样不是。
5. Which of the following is a reptile?A. TurtleB. DuckC. CatD. Bee答案:A。
乌龟是爬行动物,具有爬行动物的特征。
选项B 鸭子是鸟类,选项C 猫是哺乳动物,选项D 蜜蜂是昆虫。
6.Which of the following animals is a mammal?A. SnakeB. FrogC. DogD. Bird答案:C。
Image Classification with the Fisher Vector:Theory andPracticeJorge Sanchez,Florent Perronnin,Thomas Mensink,JakobVerbeekTo cite this version:Jorge Sanchez,Florent Perronnin,Thomas Mensink,Jakob Verbeek.Image Classification with the Fisher Vector:Theory and Practice.International Journal of Computer Vision,Springer Verlag,2013,105(3),pp.222-245.<10.1007/s11263-013-0636-x>.<hal-00830491v2>HAL Id:hal-00830491https://hal.inria.fr/hal-00830491v2Submitted on12Jun2013HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents,whether they are pub-lished or not.The documents may come from teaching and research institutions in France or abroad,or from public or private research centers.L’archive ouverte pluridisciplinaire HAL,est destin´e e au d´e pˆo t et`a la diffusion de documents scientifiques de niveau recherche,publi´e s ou non,´e manant des´e tablissements d’enseignement et de recherche fran¸c ais ou´e trangers,des laboratoires publics ou priv´e s.International Journal of Computer Vision manuscript No.(will be inserted by the editor)Image Classification with the Fisher Vector:Theory and Practice Jorge S´a nchez·Florent Perronnin·Thomas Mensink·Jakob VerbeekReceived:date/Accepted:dateAbstract A standard approach to describe an image for clas-sification and retrieval purposes is to extract a set of local patch descriptors,encode them into a high dimensional vec-tor and pool them into an image-level signature.The most common patch encoding strategy consists in quantizing the local descriptors into afinite set of prototypical elements. This leads to the popular Bag-of-Visual words(BoV)rep-resentation.In this work,we propose to use the Fisher Ker-nel framework as an alternative patch encoding strategy:we describe patches by their deviation from an“universal”gen-erative Gaussian mixture model.This representation,which we call Fisher Vector(FV)has many advantages:it is effi-cient to compute,it leads to excellent results even with effi-cient linear classifiers,and it can be compressed with a min-imal loss of accuracy using product quantization.We report experimental results onfive standard datasets–PASCAL VOC2007,Caltech256,SUN397,ILSVRC2010and Ima-geNet10K–with up to9M images and10K classes,showing that the FV framework is a state-of-the-art patch encoding technique.Jorge S´a nchezCIEM-CONICET,FaMAF,Universidad Nacional de C´o rdoba,X5000HUA,C´o rdoba,ArgentineE-mail:jsanchez@.arFlorent PerronninXerox Research Centre Europe,6chemin de Maupertuis,38240Meylan,FranceE-mail:florent.perronnin@Thomas MensinkInteligent Systems Lab Amsterdam,University of Amsterdam, Science Park904,1098XH,Amsterdam,The NetherlandsE-mail:thomas.mensink@uva.nlJakob VerbeekLEAR Team,INRIA Grenoble,655Avenue de l’Europe,38330Montbonnot,FranceE-mail:jakob.verbeek@inria.fr 1IntroductionThis article considers the image classification problem:given an image,we wish to annotate it with one or multiple key-words corresponding to different semantic classes.We are especially interested in the large-scale setting where one has to deal with a large number of images and rge-scale image classification is a problem which has received an increasing amount of attention over the past few years as larger labeled images datasets have become available to the research community.For instance,as of today,ImageNet1 consists of more than14M images of22K concepts(Deng et al,2009)and Flickr contains thousands of groups2–some of which with hundreds of thousands of pictures–which can be exploited to learn object classifiers(Perronnin et al, 2010c,Wang et al,2009).In this work,we describe an image representation which yields high classification accuracy and,yet,is sufficiently ef-ficient for large-scale processing.Here,the term“efficient”includes the cost of computing the representations,the cost of learning the classifiers on these representations as well as the cost of classifying a new image.By far,the most popular image representation for clas-sification has been the Bag-of-Visual words(BoV)(Csurka et al,2004).In a nutshell,the BoV consists in extracting a set of local descriptors,such as SIFT descriptors(Lowe,2004), in an image and in assigning each descriptor to the closest entry in a“visual vocabulary”:a codebook learned offline by clustering a large set of descriptors with k-means.Averag-ing the occurrence counts–an operation which is generally referred to as average pooling–leads to a histogram of“vi-sual word”occurrences.There have been several extensions of this popular framework including the use of better coding 12/groups2Jorge S´a nchez et al.techniques based on soft assignment(Farquhar et al,2005, Perronnin et al,2006,VanGemert et al,2010,Winn et al, 2005)or sparse coding(Boureau et al,2010,Wang et al, 2010,Yang et al,2009b)and the use of spatial pyramids to take into account some aspects of the spatial layout of the image(Lazebnik et al,2006).The focus in the image classification community was initially on developing classification systems which would yield the best possible accuracy fairly independently of their cost as examplified in the PASCAL VOC competitions(Ev-eringham et al,2010).The winners of the2007and2008 competitions used a similar paradigm:many types of low-level local features are extracted(referred to as“channels”), one BoV histogram is computed for each channel and non-linear kernel classifiers such asχ2-kernel SVMs are used to perform classification(van de Sande et al,2010,Zhang et al, 2007).The use of many channels and non-linear SVMs–whose training cost scales somewhere between quadratically and cubically in the number of training samples–was made possible by the modest size of the available databases.In recent years only the computational cost has become a central issue in image classification and object detection. Maji et al(2008)showed that the runtime cost of an inter-section kernel(IK)SVM could be made independent of the number of support vectors with a negligible performance degradation.Maji and Berg(2009)and Wang et al(2009) then proposed efficient algorithms to learn IKSVMs in a time linear in the number of training samples.Vedaldi and Zisserman(2010)and Perronnin et al(2010b)subsequently generalized this principle to any additive classifier.Attempts have been made also to go beyond additive classifiers(Per-ronnin et al,2010b,Sreekanth et al,2010).Another line of research consists in computing BoV representations which are directly amenable to costless linear classification.Boureau et al(2010),Wang et al(2010),Yang et al(2009b)showed that replacing the average pooling stage in the BoV compu-tation by a max-pooling yielded excellent results.We underline that all the previously mentioned methods are inherently limited by the shortcomings of the BoV.First, it is unclear why such a histogram representation should be optimal for our classification problem.Second,the descrip-tor quantization is a lossy process as underlined in the work of Boiman et al(2008).In this work,we propose an alternative patch aggrega-tion mechanism based on the Fisher Kernel(FK)principle of Jaakkola and Haussler(1998).The FK combines the ben-efits of generative and discriminative approaches to pattern classification by deriving a kernel from a generative model of the data.In a nutshell,it consists in characterizing a sam-ple by its deviation from the generative model.The devia-tion is measured by computing the gradient of the sample log-likelihood with respect to the model parameters.This leads to a vectorial representation which we call Fisher Vec-tor(FV).In the image classification case,the samples corre-spond to the local patch descriptors and we choose as gen-erative model a Gaussian Mixture Model(GMM)which can be understood as a“probabilistic visual vocabulary”.The FV representation has many advantages with respect to the BoV.First,it provides a more general way to define a kernel from a generative process of the data:we show that the BoV is a particular case of the FV where the gradient computation is restricted to the mixture weight parameters of the GMM.We show experimentally that the additional gradients incorporated in the FV bring large improvements in terms of accuracy.A second advantage of the FV is that it can be computed from much smaller vocabularies and there-fore at a lower computational cost.A third advantage of the FV is that it performs well even with simple linear classi-fiers.A significant benefit of linear classifiers is that they are very efficient to evaluate and efficient to learn(linear in the number of training samples)using techniques such as Stochastic Gradient Descent(SGD)(Bottou and Bousquet, 2007,Shalev-Shwartz et al,2007).However,the FV suffers from a significant disadvan-tage with respect to the BoV:while the latter is typically quite sparse,the FV is almost dense.This leads to storage as well as input/output issues which make it impractical for large-scale applications as is.We address this problem using Product Quantization(PQ)(Gray and Neuhoff,1998)which has been popularized in the computer visionfield by J´e gou et al(2011)for large-scale nearest neighbor search.We show theoretically why such a compression scheme makes sense when learning linear classifiers.We also show experimen-tally that FVs can be compressed by a factor of at least32 with only very limited impact on the classification accuracy.The remainder of this article is organized as follows.In Section2,we introduce the FK principle and describe its application to images.We also introduce a set of normaliza-tion steps which greatly improve the classification perfor-mance of the FV.Finally,we relate the FV to several recent patch encoding methods and kernels on sets.In Section3, we provide afirst set of experimental results on three small-and medium-scale datasets–PASCAL VOC2007(Ever-ingham et al,2007),Caltech256(Griffin et al,2007)and SUN397(Xiao et al,2010)–showing that the FV outper-forms significantly the BoV.In Section4,we present PQ compression,explain how it can be combined with large-scale SGD learning and provide a theoretical analysis of why such a compression algorithm makes sense when learn-ing a linear classifier.In Section5,we present results on two large datasets,namely ILSVRC2010(Berg et al,2010)(1K classes and approx.1.4M images)and ImageNet10K(Deng et al,2010)(approx.10K classes and9M images).Finally, we present our conclusions in Section6.This paper extends our previous work(Perronnin and Dance,2007,Perronnin et al,2010c,S´a nchez and Perronnin,Image Classification with the Fisher Vector:Theory and Practice 32011)with:(1)a more detailed description of the FK frame-work and especially of the computation of the Fisher infor-mation matrix,(2)a more detailed analysis of the recent related work,(3)a detailed experimental validation of the proposed normalizations of the FV ,(4)more experiments on several small-medium-scale datasets with state-of-the-art results,(5)a theoretical analysis of PQ compression for linear classifier learning and (6)more detailed experiments on large-scale image classification with,especially,a com-parison to k-NN classification.2The Fisher VectorIn this section we introduce the Fisher Vector (FV).We first describe the underlying principle of the Fisher Kernel (FK)followed by the adaption of the FK to image classification.We then relate the FV to several recent patch encoding tech-niques and kernels on sets.2.1The Fisher KernelLet X ={x t ,t =1...T }be a sample of T observations x t ∈X .Let u λbe a probability density function which mod-els the generative process of elements in X where λ=[λ1,...,λM ] ∈R M denotes the vector of M parameters of u λ.In statistics,the score function is given by the gradient of the log-likelihood of the data on the model:G X λ=∇λlog u λ(X ).(1)This gradient describes the contribution of the individual parameters to the generative process.In other words,it de-scribes how the parameters of the generative model u λshouldbe modified to better fit the data X .We note that G X λ∈R M ,and thus that the dimensionality of G X λonly depends on the number of parameters M in λand not on the sample size T .From the theory of information geometry (Amari and Nagaoka ,2000),a parametric family of distributions U ={u λ,λ∈Λ}can be regarded as a Riemanninan manifold M Λwith a local metric given by the Fisher Information Matrix (FIM)F λ∈R M ×M :F λ=E x ∼u λG X λG X λ.(2)Following this observation,Jaakkola and Haussler (1998)proposed to measure the similarity between two samples X and Y using the Fisher Kernel (FK)which is defined as:K FK (X ,Y )=G X λF −1λG Yλ.(3)Since F λis positive semi-definite,so is its ingthe Cholesky decomposition F −1λ=L λ L λ,the FK in (3)can be re-written explicitly as a dot-product:K FK (X ,Y )=G X λG Yλ,(4)whereG X λ=L λG X λ=L λ∇λlog u λ(X ).(5)We call this normalized gradient vector the Fisher Vector(FV)of X .The dimensionality of the FV G X λis equal to that of the gradient vector G X λ.A non-linear kernel machine us-ing K FK as a kernel is equivalent to a linear kernel machineusing G X λas feature vector.A clear benefit of the explicit for-mulation is that,as explained earlier,linear classifiers can be learned very efficiently.2.2Application to imagesModel.Let X ={x t ,t =1,...,T }be the set of D -dimensionallocal descriptors extracted from an image,e.g .a set of SIFT descriptors (Lowe ,2004).Assuming that the samples are in-dependent,we can rewrite Equation (5)as follows:G X λ=T∑t =1L λ∇λlog u λ(x t ).(6)Therefore,under this independence assumption,the FV is a sum of normalized gradient statistics L λ∇λlog u λ(x t )com-puted for each descriptor.The operation:x t →ϕFK (x t )=L λ∇λlog u λ(x t )(7)can be understood as an embedding of the local descriptorsx t in a higher-dimensional space which is more amenable to linear classification.We note that the independence assump-tion of patches in an image is generally incorrect,especially when patches overlap.We will return to this issue in Section 2.3as well as in our small-scale experiments in Section 3.In what follows,we choose u λto be a Gaussian mix-ture model (GMM)as one can approximate with arbitrary precision any continuous distribution with a GMM (Titter-ington et al ,1985).In the computer vision literature,a GMM which models the generation process of local descriptors in any image has been referred to as a universal (probabilis-tic)visual vocabulary (Perronnin et al ,2006,Winn et al ,2005).We denote the parameters of the K -component GMM by λ={w k ,µk ,Σk ,k =1,...,K },where w k ,µk and Σk are respectively the mixture weight,mean vector and covariance matrix of Gaussian k .We write:u λ(x )=K∑k =1w k u k (x ),(8)where u k denotes Gaussian k :u k (x )=1(2π)D /2|Σk |1/2exp−12(x −µk ) Σ−1k (x −µk ),(9)4Jorge S´a nchez et al. and we require:∀k:w k≥0,K∑k=1w k=1,(10)to ensure that uλ(x)is a valid distribution.In what follows, we assume diagonal covariance matrices which is a stan-dard assumption and denote byσ2k the variance vector,i.e. the diagonal ofΣk.We estimate the GMM parameters on a large training set of local descriptors using the Expectation-Maximization(EM)algorithm to optimize a Maximum Like-lihood(ML)criterion.For more details about the GMM im-plementation,the reader can refer to Appendix B.Gradient formulas.For the weight parameters,we adopt the soft-max formalism of Krapac et al(2011)and definew k=exp(αk)∑K j=1exp(αj).(11)The re-parametrization using theαk avoids enforcing ex-plicitly the constraints in Eq.(10).The gradients of a sin-gle descriptor x t w.r.t.the parameters of the GMM model,λ={αk,µk,Σk,k=1,...,K},are:∇αklog uλ(x t)=γt(k)−w k,(12)∇µk log uλ(x t)=γt(k)x t−µkσ2k,(13)∇σk log uλ(x t)=γt(k)(x t−µk)2σ3k−1σk,(14)whereγt(k)is the soft assignment of x t to Gaussian k,which is also known as the posterior probability or responsibility:γt(k)=w k u k(x t)∑K j=1w j u j(x t),(15)and where the division and exponentiation of vectors should be understood as term-by-term operations.Having an expression for the gradients,the remaining question is how to compute Lλ,which is the square-root of the inverse of the FIM.In Appendix A we show that under the assumption that the soft assignment distributionγt(i)is sharply peaked on a single value of i for any patch descriptor x t(i.e.the assignment is almost hard),the FIM is diagonal. In section3.2we show a measure of the sharpness ofγt on real data to validate this assumption.The diagonal FIM can be taken into account by a coordinate-wise normalization of the gradient vectors,which yields the following normalized gradients:G Xαk =1√w kT∑t=1γt(k)−w k,(16)G Xµk =1√w kT∑t=1γt(k)x t−µkσk,(17)G Xσk =1√w kT∑t=1γt(k)1√2(x t−µk)2σ2k−1.(18)Note that G Xαkis a scalar while G Xµkand G Xσkare D-dimensionalvectors.Thefinal FV is the concatenation of the gradientsG Xαk,G Xµkand G Xσkfor k=1,...,K and is therefore of dimen-sion E=(2D+1)K.To avoid the dependence on the sample size(see for in-stance the sequence length normalization in Smith and Gales(2001)),we normalize the resulting FV by the sample sizeT,i.e.we perform the following operation:G Xλ←1TG Xλ(19)In practice,T is almost constant in our experiments sincewe resize all images to approximately the same number ofpixels(see the experimental setup in Section3.1).Also notethat Eq.(16)–(18)can be computed in terms of the following0-order,1st-order and2nd-order statistics(see Algorithm1):S0k=T∑t=1γt(k)(20)S1k=T∑t=1γt(k)x t(21)S2k=T∑t=1γt(k)x2t(22)where S0k∈R,S1k∈R D and S2k∈R D.As before,the squareof a vector must be understood as a term-by-term operation.Spatial pyramids.The Spatial Pyramid(SP)was intro-duced in Lazebnik et al(2006)to take into account the roughgeometry of a scene.It was shown to be effective both forscene recognition(Lazebnik et al,2006)and loosely struc-tured object recognition as demonstrated during the PAS-CAL VOC evaluations(Everingham et al,2007,2008).TheSP consists in subdividing an image into a set of regionsand pooling descriptor-level statistics over these regions.Al-though the SP was introduced in the framework of the BoV,it can also be applied to the FV.In such a case,one com-putes one FV per image region and concatenates the result-ing FVs.If R is the number of regions per image,then theFV representation becomes E=(2D+1)KR dimensional.In this work,we use a very coarse SP and extract4FVs perimage:one FV for the whole image and one FV in three hor-izontal stripes corresponding to the top,middle and bottomregions of the image.We note that more sophisticated models have been pro-posed to take into account the scene geometry in the FVframework(Krapac et al,2011,S´a nchez et al,2012)but wewill not consider such extensions in this work.2.3FV normalizationWe now describe two normalization steps which were intro-duced in Perronnin et al(2010c)and which were shown toImage Classification with the Fisher Vector:Theory and Practice 5be necessary to obtain competitive results when the FV is combined with a linear classifier.2-normalization.Perronnin et al (2010c )proposed to 2-normalize FVs.We provide two complementary interpre-tations to explain why such a normalization can lead to im-proved results.The first interpretation is specific to the FV and was first proposed in Perronnin et al (2010c ).The sec-ond interpretation is valid for any high-dimensional vector.In Perronnin et al (2010c ),the 2-normalization is justi-fied as a way to cancel-out the fact that different images con-tain different amounts of background information.Assum-ing that the descriptors X ={x t ,t =1,...,T }of a given im-age follow a distribution p and using the i.i.d.image model defined above,we can write according to the law of large numbers (convergence of the sample average to the expected value when T increases):1T G Xλ≈∇λE x ∼p log u λ(x )=∇λxp (x )log u λ(x )dx .(23)Now let us assume that we can decompose p into a mixture of two parts:a background image-independent part which follows u λand an image-specific part which follows an image-specific distribution q .Let 0≤ω≤1be the proportion of image-specific information contained in the image:p (x )=ωq (x )+(1−ω)u λ(x ).(24)We can rewrite:1T G Xλ≈ω∇λxq (x )log u λ(x )dx +(1−ω)∇λxu λ(x )log u λ(x )dx .(25)If the values of the parameters λwere estimated with a ML process –i.e.to maximize at least locally and approximately E x ∼u λlog u λ(x )–then we have:∇λxu λ(x )log u λ(x )dx =∇λE x ∼u λlog u λ(x )≈0.(26)Consequently,we have:1T G Xλ≈ω∇λxq (x )log u λ(x )dx =ω∇λE x ∼q log u λ(x ).(27)This shows that the image-independent information is ap-proximately discarded from the FV ,a desirable property.However,the FV still depends on the proportion of image-specific information ω.Consequently,two images contain-ing the same object but different amounts of background in-formation (e.g .the same object at different scales)will have different signatures.Especially,small objects with a small ωvalue will be difficult to detect.To remove the dependenceon ω,we can 2-normalize 3the vector G X λor G X λ.3Normalizing by any p -norm would cancel-out the effect of ω.Perronnin et al (2010c )chose the 2-norm because it is the natural norm associated with the dot-product.In Section 3.2we experiment with different p -norms.We now propose a second interpretation which is validfor any high-dimensional vector (including the FV).Let U p ,E denote the uniform distribution on the p unit sphere in an E -dim space.If u ∼U p ,E ,then a closed form solution for the marginals over the p -normalized coordinates u i =u i / u p ,is given in Song and Gupta (1997):g p ,E (u i )=p Γ(E /p )2Γ(1/p )Γ((E −1)/p )(1−|u i |p )(E −1)/p −1(28)with u i ∈[−1,1]For p =2,as the dimensionality E grows,this distribution converges to a Gaussian (Spruill ,2007).Moreover,Burras-cano (1991)suggested that the p metric is a good measure between data points if they are distributed according to a generalized Gaussian:f p (x )=p (1−1/p )2Γ(1/p )exp −|x −x 0|p p.(29)To support this claim Burrascano showed that,for a givenvalue of the dispersion as measured with the p -norm,f p is the distribution which maximizes the entropy and therefore the amount of information.Note that for p =2,equation (29)corresponds to a Gaussian distribution.From the above and after noting that:a)FVs are high dimensional signatures,b)we rely on linear SVMs,where the similarity between samples is measured using simple dot-products,and that c)the dot-product between 2-normalized vectors relates to the2-distance as x −y 22=2(1−x y ),for x 2= y 2=1,itfollows that choosing p =2for the normalization of the FV is natural.Power normalization.In Perronnin et al (2010c ),it was proposed to perform a power normalization of the form:z ←sign (z )|z |ρwith 0<ρ≤1(30)to each dimension of the FV .In all our experiments the power coefficient is set to ρ=12,which is why we also refer to this transformation as “signed square-rooting”or more sim-ply “square-rooting”.The square-rooting operation can be viewed as an explicit data representation of the Hellinger or Bhattacharyya kernel,which has also been found effec-tive for BoV image representations,see e.g .Perronnin et al (2010b )or Vedaldi and Zisserman (2010).Several explanations have been proposed to justify such a transform.Perronnin et al (2010c )argued that,as the num-ber of Gaussian components of the GMM increases,the FV becomes sparser which negatively impacts the dot-product.In the case where FVs are extracted from sub-regions,the “peakiness”effect is even more prominent as fewer descriptor-level statistics are pooled at a region-level compared to the image-level.The power normalization “unsparsifies”the FV and therefore makes it more suitable for comparison with the dot-product.Another interpretation proposed in Perronnin et al (2010a )is that the power normalization downplays the6Jorge S´a nchez et al. influence of descriptors which happen frequently within agiven image(bursty visual features)in a manner similar toJ´e gou et al(2009).In other words,the square-rooting cor-rects for the incorrect independence assumption.A moreformal justification was provided in J´e gou et al(2012)asit was shown that FVs can be viewed as emissions of a com-pound distribution whose variance depends on the mean.However,when using metrics such as the dot-product or theEuclidean distance,the implicit assumption is that the vari-ance is stabilized,i.e.that it does not depend on the mean.Itwas shown in J´e gou et al(2012)that the square-rooting hadsuch a stabilization effect.All of the above papers acknowledge the incorrect patchindependence assumption and try to correct a posteriori forthe negative effects of this assumption.In contrast,Cinbiset al(2012)proposed to go beyond this independence as-sumption by introducing an exchangeable model which tiesall local descriptors together by means of latent variablesthat represent the GMM parameters.It was shown that sucha model leads to discounting transformations in the Fishervector similar to the simpler square-root transform,and witha comparable positive impact on performance.Wefinally note that the use of the square-root transformis not specific to the FV and is also beneficial to the BoV asshown for instance by Perronnin et al(2010b),Vedaldi andZisserman(2010),Winn et al(2005).2.4SummaryTo summarize the computation of the FV image representa-tion,we provide an algorithmic description in Algorithm1.In practice we use SIFT(Lowe,2004)or Local Color Statis-tics(Clinchant et al,2007)as descriptors computed on adense multi-scale grid.To simplify the presentation in Al-gorithm1,we have assumed that Spatial Pyramids(SPs)arenot used.When using SPs,we follow the same algorithmfor each region separately and then concatenate the FVs ob-tained for each cell in the SP.2.5Relationship with other patch-based approachesThe FV is related to a number of patch-based classificationapproaches as we describe below.Relationship with the Bag-of-Visual words(BoV).First,the FV can be viewed as a generalization of the BoV frame-work(Csurka et al,2004,Sivic and Zisserman,2003).In-deed,in the soft-BoV(Farquhar et al,2005,Perronnin et al,2006,VanGemert et al,2010,Winn et al,2005),the averagenumber of assignments to Gaussian k can be computed as:1 TT∑t=1γt(k)=S0kT.(34)Algorithm1Compute Fisher vector from local descriptorsInput:–Local image descriptors X={x t∈R D,t=1,...,T},–Gaussian mixture model parametersλ={w k,µk,σk,k=1,...,K}Output:–normalized Fisher Vector representation G Xλ∈R K(2D+1)pute statistics–For k=1,...,K initialize accumulators–S0k←0,S1k←0,S2k←0–For t=1,...T–Computeγt(k)using equation(15)–For k=1,...,K:•S0k←S0k+γt(k),•S1k←S1k+γt(k)x t,•S2k←S2k+γt(k)x2tpute the Fisher vector signature–For k=1,...,K:G Xαk=S0k−Tw k/√w k(31)G Xµk=S1k−µk S0k/(√w kσk)(32)G Xσk=S2k−2µk S1k+(µ2k−σ2k)S0k/2w kσ2k(33)–Concatenate all Fisher vector components into one vectorG Xλ=G Xα1,...,G XαK,G Xµ1,...,G XµK,G Xσ1,...,G XσK3.Apply normalizations–For i=1,...,K(2D+1)apply power normalization–G Xλi←signG XλiG Xλi–Apply 2-normalization:G Xλ=G Xλ/G XλG XλThis is closely related to the gradient with respect to the mix-ture weight G X akin th FV framework,see Equation(16).Thedifference is that G X akis mean-centered and normalized bythe coefficient√w k.Hence,for the same visual vocabularysize K,the FV contains significantly more information byincluding the gradients with respect to the means and stan-dard deviations.Especially,the BoV is only K dimensionalwhile the dimension of the FV is(2D+1)K.Conversely,we will show experimentally that,for a given feature dimen-sionality,the FV usually leads to results which are as good–and sometimes significantly better–than the BoV.How-ever,in such a case the FV is much faster to compute thanthe BoV since it relies on significantly smaller visual vo-cabularies.An additional advantage is that the FV is a moreprincipled approach than the BoV to combine the genera-tive and discriminative worlds.For instance,it was shownin(Jaakkola and Haussler,1998)(see Theorem1)that if theclassification label is included as a latent variable of the gen-erative model uλ,then the FK derived from this model is,asymptotically,never inferior to the MAP decision rule forthis model.Relationship with GMM-based representations.Sev-eral works proposed to model an image as a GMM adapted。