第七章对实体模型进行网格划分
7.1 如何对实体模型进行网格划分
生成节点和单元的网格划分过程包括三个步骤:
·定义单元属性(在§7.2中论述)
·定义网格生成控制(可选择的)。ANSYS程序提供了大量的网格生成控制,可按需选择。见§7.3和§§7.4对网格控制的论述)。
·生成网格(在§7.5中论述)。
第二步定义网格生成控制不是必须的,因为缺省的网格生成控制对多数模型生成都是合适的。如果没有指定网格生成控制,程序会在DESIZE命令使用缺省设置生成自由网格。可用Smartsize项替代产生质量更好的自由网格(见本章中的§7.3.5)
7.1.1 自由网格还是映射网格?
在对模型进行网格划分之前,甚至在建立模型之前,对于确定采用自由网格还是映射网格进行分析更为合适是十分重要的。自由网格对于单元形状无限制,并且没有特定的准则。
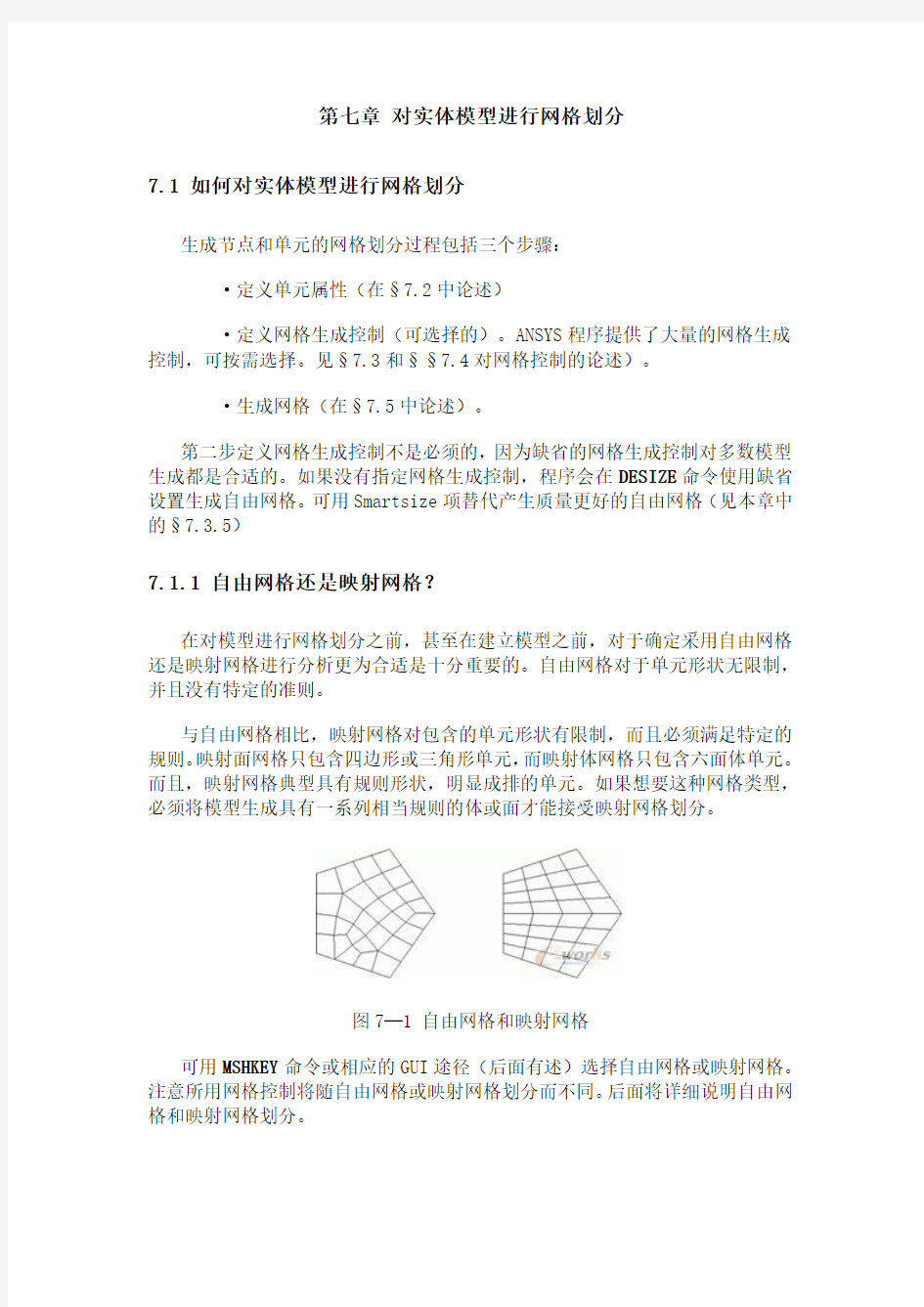
与自由网格相比,映射网格对包含的单元形状有限制,而且必须满足特定的规则。映射面网格只包含四边形或三角形单元,而映射体网格只包含六面体单元。而且,映射网格典型具有规则形状,明显成排的单元。如果想要这种网格类型,必须将模型生成具有一系列相当规则的体或面才能接受映射网格划分。
图7─1 自由网格和映射网格
可用MSHKEY命令或相应的GUI途径(后面有述)选择自由网格或映射网格。注意所用网格控制将随自由网格或映射网格划分而不同。后面将详细说明自由网格和映射网格划分。
7.2 定义单元属性
在生成节点和单元网格之前,必须定义合适的单元属性。即必须设定:
·单元类型(如:BEAM3,SHELL61等)。
·定义实常数(给定诸如厚度或截面积等单元的几何特性)。
·定义材料特性(如杨氏模量、热传导率等)。
·单元坐标系
·截面号(只对BEAM44,BEAM188和BEAM189单元有效─见§7.5.2)
注意:在对梁划分网格时,还需给定方向关键点作为线的属性。§7.5.2对梁网格划分有详细叙述。
7.2.1生成单元属性表
为定义单元属性,首先必须建立一些单元属性表。典型地包括单元类型(ET 命令或菜单途径Main Menu>Preprocessor>Element Type>Add/Edit/Delete)、实常数组(R命令或菜单途径Main Menu>Preprocessor>Real Constants)、材料特性(MP和TB命令,菜单途径Main Menu> Preprocessor>Material Props>material option)。
利用诸如LOCAL、CLOCAL等命令也可以组集坐标系表。(菜单途径Utility Menu>WorkPlane>Local Coordinate Systems>Create Local CS>option)。这个表用来给单元分配单元坐标系。(并非所有的单元类型都可用这种方式分配单元坐标系。参见本手册中§3.5的信息。对于单元的叙述,参见《ANSYS Elements Reference》。)
对于用BEAM188或BEAM189单元对梁进行网格划分,可用SECTYPE和SECDATA 命令建立截面表。(Main Menu>Preprocessor>Sections)
注意:方向关键点是线的属性而不是单元的属性。不能生成方向关键点表,详见§§7.2.2。
上述单元属性表可见图7-2中的示例。(对生成单元属性表的更多信息参见《ANSYS Basic Analysis Guide》中的§1。)
图7─2单元属性表。
查看表的内容可用ETLIST(单元类型表)、RLIST(实常数表)、MPLIST(材料特性表)命令(或选择相应的菜单途径Utility
Menu>List>Properties>property type)。可用CSLIST(或菜单途径Utility Menu>List>Other>Local Coord Sys)命令查看坐标系表。可用SLIST(Main Menu>Preprocessor>Sections>List Sections)命令查看截面表。
7.2.2在划分网格之前分配单元属性
一旦建立了属性表,通过指向表中合适的条目即可对模型的不同部分分配单元属性。指针就是参考号码集,包括材料号(MAT),实常数集号(REAL),单元类型号(TYPE),坐标系号(ESYS),及用BEAM188或BEAM189单元对梁进行网格划分的截面号(SECNUM)。可以直接给所选定的实体模型图元分配单元属性,或定义缺省的属性集,在后来的生成单元的网格划分操作中使用。
注意:如前面提到的,在对梁划分网格时给线分配方向关键点作为其属性,但并不能建立方向关键点表。因此,分配方向关键点为其属性时,必须是直接分配给所选线;不能定义缺省的方向关键点集以备后面网格划分操作所使用。详见7.5.2中关于分配方向关键点的内容。
7.2.2.1 直接给实体模型图元分配属性
给实体模型图元分配单元属性允许对模型的每个区域预置单元属性,从而可以避免在网格划分过程中重置单元属性。(清除实体模型的节点和单元不会删除直接分配给图元的属性。)
利用下列命令和GUI途径可直接给实体模型图元分配属性。
·给关键点分配属性:
命令:KATT
GUI :Main Menu>Preprocessor>-Attributes-Define>All Keypoints
Main Menu>Preprocessor>-Attributes-Define>Picked KPs
·给线分配属性:
命令:LATT
GUI : Main Menu>Preprocessor>-Attributes-Define>All Lines
Main Menu>Preprocessor>-Attributes-Define>Picked Lines
·给面分配属性:
命令:AATT
GUI : Main Menu>Preprocessor>-Attributes-Define>All Areas
Main Menu>Preprocessor>-Attributes-Define>Picked Areas
·给体分配属性:
命令:VATT
GUI : Main Menu>Preprocessor>-Attributes-Define>All Volumes
Main Menu>Preprocessor>-Attributes-Define>Picked Volumes 7.2.2.2 分配缺省属性
仅通过指向属性表的不同条目即可分配缺省的属性集。在生成模型时(即开始划分网格时),程序将从表中给实体模型和单元分配属性。直接分配给实际模型图元(上述)的属性将取代缺省的属性。而且,当清除实体模型图元的节点和单元时,任何通过缺省属性分配的属性也将被删除。
分配缺省的属性集:
命令:TYPE, REAL, MAT, ESYS, SECNUM
GUI : Main Menu>Preprocessor>-Attributes-Define>Default Attribs
Main Menu>Preprocessor>-Modeling-Create>Elements>Elem Attributes
7.2.2.3 自动选择维数正确的单元类型
有些情况下,ANSYS程序能对网格划分或拖拉操作选择正确的单元类型,当选择为明显正确时,用户不必人为地转换单元类型。
特殊地,当未给实体模型图元分配单元类型〔xATT〕并且缺省的单元类型〔TYPE〕对于要执行的操作维数不对时,但已定义单元属性表中只有一个维数正确的单元,那么ANSYS程序会自动地利用此种单元类型执行这个操作。
网格划分和拖拉操作受此影响的命令有KMESH、LMESH、AMESH、VMESH、FVMESH、VOFFST、VEXT、VDRAG、VROTAT和VSWEEP。
7.2.2.4在节点上定义可变厚度
可对壳和梁单元的节点处定义厚度。
用下列方法定义可变厚度:
命令:RTHICK
GUI:Main Menu>Preprocessor>Real Constants>Thickness Func
壳单元能够对复杂的厚度分布进行造型。例如SHELL63单元允许在它的四个角点上分配不同的厚度。在给定的角点之间假定每个单元厚度是光滑变化的。
对一组单元定义一个复杂的厚度变化可能是一个挑战。最坏的情况,每一个单元都有其自己唯一的实常数厚度集。对这些情况,用RTHICK命令可以简化模型的定义。
操作步骤由下列输入列表给出并有下面的图形,显示了10×10的矩形用
0.5×0.5的正方形SHELL63单元填充。
/TITLE,RTHICK Example
/PREP7
ET,1,63
RECT,,10,,10
ESHAPE,2
ESIZE,,20
AMESH,1
EPLO
图7-3 最初的单元
厚度可按下列公式定义:thickness = 0.5 + 0.2x + 0.02y2.
为达到这种变化,可以生成一个数组反映节点号的厚度。(换句话说,数组的N th值就是节点N处希望的厚度。)
MXNODE = NDINQR(0,14)
*DIM,THICK,,MXNODE
*DO,NODE,1,MXNODE
*IF,NDINQR(NODE,1),EQ,1,THEN
THICK(node) = 0.5 + 0.2*NX(NODE) + 0.02*NY(NODE)**2
*ELSE
THICK(NODE) = 0
*ENDIF
*ENDDO
NODE = $ MXNODE =
最后,用RTHICK函数分配数组的厚度给单元。
RTHICK,THICK(1),1,2,3,4
/ESHAPE,1.0 $ /USER,1 $ /DIST,1,7
/VIEW,1,-0.75,-0.28,0.6 $ /ANG,1,-1
/FOC,1,5.3,5.3,0.27 $ EPLO
图7-4 带有厚度的壳单元示意图
7.3 网格划分控制
ANSYS程序使用的缺省网格控制也许可以使用户的分析模型生成足够的网格。在此种情况下,不必指定任何网格划分控制。可是,如果使用网格划分控制,则必须在对模型划分网格前设定网格划分控制。
网格划分控制能建立用在实体模型划分网格的因素,如单元形状、中间节点位置、单元大小等。此步骤是整个分析中最重要的因素之一,因为此阶段对模型生成的决定将对分析的准确性和经济性有决定性的影响。(在设置网格划分控制时应当考虑的因素详见本手册的规划分析方案。)
7.3.1 ANSYS网格划分工具
ANSYS网格划分工具(Main Menu>Preprocessor>MeshTool)提供了最常用的网格划分控制和最常用的网格划分操作。网格划分工具是一个交互的“工具箱”,不仅由于它包含了大量的功能(或工具),还因为一旦打开它,它就保持打开的状态直到关闭它或离开前处理PREP7。
尽管网格划分工具的所有功能也能通过另外的ANSYS命令和菜单得到,但利用网格划分工具是十分有效的捷径。
通过网格划分工具可得的功能包括:
·控制SmartSizing水平
·设置单元尺寸控制
·指定单元形状
·指定网格划分类型(自由或映射)
·对实体模型图元划分网格
·清除网格
·细化网格
这个向导包含了所有的功能,关于网格划分工具的详细情况,利用上述途径打开它并点击它的帮助按钮。
7.3.2 单元形状
如果打算划分网格的单元类型可以采用不止一种形状,那么应当设置单元形状为最小的那一种。例如,在同一个划分网格的区域的多个面单元可以是三角形或四边形的。单元可是六面体(块)或四面体形状,但建议在同一个模型中不要混用这两种形状的单元。(例外是使用过渡的金字塔形单元,本手册生成
§7.3.9中有论述。)
7.3.2.1. 注意单元形状的退化
本章假定用户熟悉单元形状退化的概念。例如,PLANE82单元,它是有八个节点(I、J、K、L、M、N、O、P)的二维结构实体单元。缺省地,PLANE82单元有四边形形状。可是,通过定义相同节点号的K、L、O可形成三角形单元。因此,PLANE82单元可以退化为三角形。如图PLANE82所示该单元的缺省形式和退化形式。
图7-5单元形状退化的例子。
尽管它有助于用户理解这个概念,当在划分网格前指定单元形状时,不必考虑单元形状是缺省形式还是某一单元的退化形式。相反,可以考虑想要的单元形状本身最简单的形式(四边形,三角形,六面体或四面体)。
7.3.2.2指定单元形状
用下列方法指定单元形状:
命令:MSHAPE,KEY,Dimension
GUI : Main Menu>Preprocessor>MeshTool
Main Menu>Preprocessor>-Meshing-Mesher Opts
Main Menu>Preprocessor>-Meshing-Mesh>-Volumes-Mapped>4 to 6 sided
指定单元形状时要考虑两个因素:想要的单元形状和要划分网格的模型的维数。
7.3.2.2.1命令方法
如果正在使用MSHAPE命令,维数变量(2D或3D)的值表明待划分网格模型的维数。KEY值(0或1)表示划分网格的单元形状:
·当KEY=0,如果Dimension=2D, ANSYS将用四边形单元划分网格,如果Dimension=3D,ANSYS将用六面体形的单元划分网格。(只要单元类型分别支持四边形或六面体单元形状。)
·当KEY=1,如果Dimension=2D ANSYS 将用三角形单元划分网格,如果Dimension=3D,ANSYS将用四面体形单元划分网格(只要单元类型分别支持三角形或四面体单元形状。)
7.3.2.2.2. GUI方法(通过网格划分工具)
为提高效率,网格划分工具(本章中前面叙述的)是推荐的指定单元形状的方法。可以通过下列GUI途经打开网格划分工具:Main
Menu>Preprocessor >MeshTool。利用网格划分工具,只在让ANSYS对模型划分想要的单元形状上拾取即可。从网格划分工具中,也可拾取想让ANSYS所用的网格划分的类型(自由或映射)。(详见§7.3.3,选择自由或映射网格划分。)使用网格划分工具使选择单元形状得到简化,因为它只提供所要求网格划分类型和模型维数相容的单元形状。(参见表7-1)。
注意:指定的单元形状与所要求的网格划分类型(自由或映射)密切相关,以便在指定单元形状之前阅读本手册的会有所帮助。
有些情况下,MSHAPE命令及合适的网格划分命令(AMESH、VMESH,或其相应的菜单途径Main Menu>Preprocessor>-Meshing-Mesh>meshing option)就是对模型网格划分所需的。每个单元的大小由指定的缺省单元大小(SMRTSIZE或DESIZE)确定。例如,下图7-6(左)模型可用VMESH命令生成右边的网格:
图7-6缺省单元尺寸
以上模型程序选择的单元尺寸可能对分析是足够的或不够,取决于结构物理方面。改变网格划分的另一途径是改变缺省的SmartSize 的级别[SMRTSIZE]并重新进行网格划分。详见本手册§7.3.5。
7.3.3选择自由或映射网格划分
除指定单元形状外,还要指定对模型进行网格划分的网格类型(自由或映射)。通过设置网格划分指令:
命令:MSHKEY
GUI : Main Menu>Preprocessor>MeshTool
Main Menu>Preprocessor>-Meshing-Mesher Opts
正如§7.3.2.2中所述的,可用网格划分工具(Main Menu>Preprocessor> MeshTool)指定网格划分类型。网格划分工具是推荐方法。相关信息参见
§7.3.2.2。
单元形状〔MSHAPE〕和网格划分类型〔MSHKEY〕的设置共同影响网格的生成。表7-1列出了ANSYS程序支持的单元形状和网格划分类型。
表7-1 ANSYS支持的单元形状和网格划分类型。
表7-2说明了未设定单元形状和(或)网格划分类型值的结果。
表7-2未指定单元形状和(或)网格划分类型将发生的情况。
有关MSHAPE和MSHKEY命令详见《ANSYS Elements Reference》。
7.3.4控制中间节点的位置
当使用二次单元划分网格时,可以控制中间节点的位置。中间节点位置的选择有:
·边界区域单元上的中间节点沿着边界线或面的弯曲方向。这是缺省设置。
·设置所有单元的中间节点使单元边是直的。此选项允许沿曲线进行粗糙的网格划分。但是模型的弯曲并不与之匹配。
·不生成中间节点(从单元中消除中间节点)。
控制中间节点的位置:
命令:MSHMID
GUI : Main Menu>Preprocessor>-Meshing-Mesher Opts
7.3.5自由网格划分中单元的智能单元尺寸
智能的单元大小(SmartSizing)是自由网格划分操作生成初始单元大小的网格划分特点。智能的单元尺寸在自动网格生成过程中对生成合理的单元形状提供了机会。这个特点由SMRTSIZE命令控制,提供了可供H方法和P方法模型使用的网格划分设置范围(从粗糙到细致的网格划分)。
缺省地,DESIZE命令方法控制单元大小在自由网格划分中使用(见§7.3.6)。然而,在自由网格划分中推荐使用Smartsizing。为打开Smartsizing,只要在SMRTSIZE命令中指定单元尺寸级别即可(见下面基本控制的讨论)。
注意:如果利用Smartsizing对只包含一个面的模型进行网格划分,则ANSYS 将利用此面去计算对此模型网格划分所用的向导单元的大小。另一方面,对既包含面又包含体的模型用 SmartSizing,ANSYS程序将用体去计算模型的向导单元尺寸。尽管第一个模型中的面(仅有面)和第二个模型中的面(面和体)相同,Smartsizing设置也相同,ANSYS用来对第一个模型划分网格的单元没有第二个模型中的单元粗糙。ANSYS这样做是为了防止体划分了过多的网格。(可是,如果指定了总体单元尺寸〔ESIZE〕,两个模型的单元就会相同了,因为ANSYS将使用给定的尺寸作为向导单元的尺寸。)
注意:当使用 SmartSizing时,建议指定想要的 SmartSizing设置〔SMRTSIZE〕,然后应立即对整个模型进行网格划分〔AMESH,ALL或VMESH,ALL〕,而不是用面对面设置 SmartSizing 或用体对体设置SmartSizing,用面对面或体对体设置模型的SmartSizing会生成不令人满意的网格。
7.3.5.1 SmartSizing的优点
SmartSizing算法首先对待划分网格的面或体的所有线估算单元边长。然后对几何体中的弯曲和接近区域的线进行细化。由于所有的线和面在网格划分开始时已指定大小,生成网格的质量将与待划分网格的面或体的顺序无关。(记住,所有的面和体应当同时划分网格结果最好)。
如果用四边形单元来给面划分网格,SmartSizing尽量给每一个面平均分配线数以使全部划分为四边形成为可能。只有在迫使所有的网格都为四边形时会生成形状很差的单元或在边界出现奇异区域时在网格中才会出现三角形单元。
7.3.5.2基本与高级的的SmartSizing控制
这里有两种SmartSizing控制:基本的和高级的。
7.3.5.2.1. 基本的控制
利用基本控制,可以简单地指定网格划分尺寸从1(细网格)到10(粗网格),程序会自动地设置一系列独立的控制值用来生成想要的尺寸级别。利用下列方法指定单元尺寸的级别:
命令:SMRTSIZE,SIZLVL
GUI : Main Menu>Preprocessor>MeshTool
Main Menu>Preprocessor>-Meshing-Size Cntrls>-SmartSize-Basic
图7-7表示利用几个不同的SmartSizing设置(包括缺省值6在内)生成的网格。
图7-7对同一模型改变SmartSize的级别。
7.3.5.2.2. 高级控制
用户可能会乐于使用高级方法,分别设置人工控制网格质量。允许“拧”网格以更好地适应用户的需要。可以改变诸如小孔和小角度处的粗化选项。网格
扩展和过渡因子(见SMRTSIZ E命令高级控制的完整叙述)。而且,可用ESIZE 命令给SmartSizing设定初始单元尺寸。
用下列方法设置高级SmartSizing控制:
命令:SMRTSIZE and ESIZE
GUI: Main Menu>Preprocessor>-Meshing-Size
Cntrls>-SmartSize-Adv Opts
建模与网格划分指南第七章
发表时间:2007-8-6 作者: 安世亚太
关键字: CAE 教程网格划分
7.3.5.3与其它网格控制交互使用
局部单元尺寸控制(在后面的§7.3.7中讨论)可用来与SmartSizing相连。但是,当设置的单元尺寸发生冲突时,SmartSizing算法将做如下处理:
·将考虑任何对面的单元尺寸定义(AESIZE命令或菜单途径Main Menu>Preprocessor>-Meshing-Size Cntrls>-Areas-option),但为适应曲率和几何的近似可能会替换它。
·给指定线的单元尺寸将作为定义尺寸使用。(LESIZE命令或菜单途径Main Menu>Preprocessor>-Meshing-Size Cntrls>-Lines-option)。(LESIZE 的KYNDIV开关允许对需要替换的尺寸定义指定规则。)
·任何对关键点指定的单元尺寸(KESIZE命令或菜单途径Main Menu>Preprocessor>-Meshing-Size Cntrls> -Keypoints-option)都会得到分配,但为适应曲率和几何近似将被替换。
·如果设置总体单元尺寸(ESIZE命令或菜单途径Main Menu> Preprocessor>-Meshing-Size Cntrls>-Global-Size),为适应弯曲和几何近似它将会在必要时被替换。如果希望单元尺寸一致,应当设定总体单元尺寸,并将SmartSizing关闭(SMRTSIZE,OFF或菜单途径Main Menu>
Preprocessor>-Meshing-Size Cntrls>-SmartSize-Basic)。
·用DESIZE命令(Main Menu>Preprocessor>-Meshing-Size Cntrls>- Global– Other)指定的缺省单元尺寸在SmartSizing打开时将被忽略。
7.3.6对映射网格划分的缺省单元尺寸
DESIZE命令可以改变下列缺省值:未划分网格的线上最少和最多的单元数,每个单元的最大跨角,最小及最大边长。DESIZE命令(菜单途径Main
Menu>Preprocessor> -Meshing- Size Cntrls>-Global-Other)常用来控制映射网格划分的单元尺寸。DESIZE命令也用在自由网格划分的缺省设置。但是,对自由网格划分建议使用SmartSizing(SMRISIZE)。
作为一个例子,在图7-8中生成的映射网格的尺寸是进入程序缺省的单元尺寸的结果。右边生成的网格是用DESIZE命令修改了最少单元数目(MINL)和每单元的最大跨角(ANGL)的结果。
图7-8改变缺省单元尺寸。
对于较大的模型,通过DESIZE命令查看缺省的网格尺寸是明智的。可通过显示线的分割来实现。预查看缺省的网格尺寸的步骤如下:
1、建立实体模型。
2、选择单元类型
3、选择容许的单元形状〔MSHAPE〕
4、选择网格划分器(自由或映射)〔MSHKEY〕。
5、键入LESIZE,ALL(通过DESIZE规定调整线的分割数。)
6、画线〔LPLOT〕。
例如:
·
·
·
ET,1,45 ! 8 node hexahedral-shaped element
MSHAPE,0 ! Use hexahedra
MSHKEY,1 ! Use mapped meshing
LESIZE,ALL ! Adjust line divisions based on DESIZE
LPLOT
图7-9预览缺省的网格
·
·
·
DESIZE,5,,30,15 ! Change default element sizes
LESIZE,ALL,,,,,1 ! Adjust line divisions based on DESIZE, force adjustments
LPLOT
图7-10预览修改的网格
7.3.7局部网格划分控制
在许多情况下,对结构的物理性质来说用缺省单元尺寸生成的网格不合适。例如有应力集中或奇异的模型。在这种情况下,需要深入网格划分过程。可用下列定义单元尺寸的方法来更多地进行控制:
·通过表面的边界(线)所用的单元边长控制总体单元尺寸,或控制每条线划分的单元数:
命令:ESIZE
GUI: Main Menu>Preprocessor>-Meshing-Size Cntrls>-Global-Size
Main Menu>Preprocessor>-Modeling-Operate>Extrude/Sweep>Size
·控制给定关键点附近的单元尺寸:
命令:KESIZE
GUI: Main Menu>Preprocessor>-Meshing-Size
Cntrls>-Keypoints-All KPs
Main Menu>Preprocessor>-Meshing-Size Cntrls>-Keypoints-Picked KPs
Main Menu>Preprocessor>-Meshing-Size Cntrls>-Keypoints-Clr Size
·控制给定线上的单元数:
命令:LESIZE
GUI: Main Menu>Preprocessor>-Meshing-Size Cntrls>-Lines-All Lines
Main Menu>Preprocessor>-Meshing-Size Cntrls>-Lines-Picked Lines
Main Menu>Preprocessor>-Meshing-Size Cntrls>-Lines-Clr Size
注意:当用GUI方法对给定线设置单元数时,任何与一个或更多的已划分网格的线、面或体相连的线,ANSYS程序提示用户决定是否清除已划分网格的图元。如果肯定提示,那么ANSYS就会清除已划分了网格的图元。(只有在通过GUI执行此项操作时出现;在使用[LESIZE]命令方法时ANSYS并不提示用户)
以上叙述的所有定义尺寸的方法都可以一起使用。当使用一个以上上述命令并发生尺寸冲突的情况,遵守一定的级别。这种级别与使用DESIZE还是SMRTSIZE 方法定义缺省单元尺寸而会有不同。
·用DESIZE定义单元尺寸命令的级别。对任何给定线,沿线定义的单元尺寸如下:
——用LESIZE命令给线分割常是高级别。
——如果未对线进行分割,则用KESIZE在其关键点(如有)处定义。
——如果未在线上或其关键点上指定尺寸,可用ESIZE定义单元尺寸。
——如果没有上述任何尺寸定义,则用DESIZE命令控制线上的单元尺寸。
·用SMRTSIZE定义单元尺寸的优先级。对任何给定线,沿着线生成的单元尺寸如下:
——用LESIZE定义的线分割常是高优先级。
——如果没有给线分割,则用KESIZE在其关键点上定义,但在曲率和一些小的几何区域将被替换。
——如果在线上或其关键点上未定义任何分割,ESIZE定义将作为起始单元尺寸,但考虑到曲率和小几何特点可能会被替换。
——如果没有任何上述尺寸定义,则SMRTSIZE命令会控制线的单元尺寸。
注意:对于用KESIZE或ESIZE命令建立的线分割和网格划分操作,在线列表
〔LLIST〕时会出现负的编号。而由LESIZE建立的线分割则为正的编号。这些号码的符号反映在清除网格(ACLEAR, VCLEAR命令, 或菜单途径Main Menu> Preprocessor> -Meshing-Clear>entity)之后ANSYS如何处理线分割。如果线分割的号码为正,则在ANSYS清除网格操作时不消除线分割;如果号码为负,则ANSYS在清除网格操作时也将消除线分割(在后来的线列表中会表现为零)。
对线性静态结构分析和线性稳态热分析可用自适应网格划分功能自动建立网格划分控制,这种控制基于使分析的估计误差低于某个目标值。自适应网格划分程序在§4在《ANSYS Advanced Analysis Techniques Guide》中有论述。
7.3.8内部网格划分控制
关于网格划分尺寸的讨论是集中在实体模型边界的外部单元尺寸的定义(LESIZE,ESIZE等)。然而,也可以在面的内部没有可以引导网格划分的尺寸线处控制网格划分。可用下列方法实现:
命令:MOPT
GUI : Main Menu>Preprocessor>-Meshing-Size Cntrls>-Global-Area Cntrls
7.3.8.1控制网格的扩展
MOPT命令中的Lab=EXPND项可以用来引导在一个面的边界处将网格划分得较细,而在内部划分得相对粗糙(如图7-11所示)。
图7-11没有网格扩展及有网格扩展的面网格划分。
图7-11中,网格(a)是由ESIZE命令(Main
Menu>Preprocessor>-Meshing-Size Cntrls>-Global-Size)对面进行设定而生成的。注意到单元形状较好,但由于单元尺寸较均匀,所以需要698个单元来填
充这个面。(这个模型仅由一个面组成。)利用MOPT命令的扩展功能(Lab=EXPND),网格(b)生成较少的单元,因为这种网格划分容许面上网格从边界上的较小尺寸的单元扩展到内部较大的单元。但是,有些用这种方法划分的网格单元,尺寸比较差(例如,小孔附近)。样式(b)的另一缺点是从小单元到大单元的单元尺寸变化较大。尤其是在小孔附近更加明显。
注意:尽管讨论局限在面网格扩展〔LAB=EXPND〕,仍可用MOPT命令控制四面体网格的扩展〔LAB=TETEXPND〕,详见《ANSYS Commands Reference》中有关MOPT命令的叙述。
7.3.8.2控制网格过渡
为改善(b)中的网格,需要从边界的小单元到内部的大单元的更平缓过渡。MOPT命令中的Lab=TRANS项可用来控制从细到粗网格的过渡。图7-12为用MOPT,TRAN,1.3命令对上述相同区域划分的网格,这个网格比图7-11中的(a)网格数少,但从小单元到大单元的过渡却是相当平缓。而且单元的尺寸比图7-11图中的(b)网格好得多。
图7-12用扩展和过渡控制(MOPT命令)划分的面网格。
7.3.8.3控制ANSYS使用的网格划分器。
可用MOP T命令控制ANSYS使用哪一个表面网格划分器(三角形和四边形)和哪一个四面体网格划分器执行网格划分操作〔AMESH、VMESH〕。
注意:四边形的表面网格划分与选择三角形表面网格划分器划分的网格是不同的。这是对的,因为所有的自由四边形网格划分算法用三角形网格作为起点。
命令:MOPT
Base point and delta创建出的点重合时看不到 大部分可划分为四面体网格,但六面体网格仍是首选,四面体网格是最后的选择,使用复杂结构。 六面体(梯形)在中心质量差,四面体在边界层处质量差,边界层处用棱柱网格prism。 棱锥为四面体和六面体之间的过渡 棱柱由四面体网格被拉伸时生成 3D Sweep扫掠网格划:只有单一的源面和目标面,膨胀层可生成纯六面体或棱柱网格 Multizone多域扫掠网格:对象是多个简单的规则体组成时(六面体)——mapped mesh type映射网格类型:包括hexa、hexa/prism ——free mesh type自由网格类型:包括not allowed、tetra、hexa dominant、hexa core(六面体核心) ——src/trg selection源面/目标面选择,包括automatic、manual source手动源面选择 patch conforming:考虑一些小细节(四面体),包括CFD的膨胀层或边界层识别 patch independent:忽略一些小细节,如倒角,小孔等(四面体),包括CFD 的膨胀层或边界层识别 ——max element size 最大网格尺寸 ——approx number of elements大约网格数量 mesh based defeaturing 清除网格特征 ——defeaturing tolerance 设置某一数值时,程序会根据大小和角度过滤掉几何边 Use advanced size function 高级尺寸功能 ——curvature['k??v?t??]曲率:有曲率变化的地方网格自动加密,如螺钉孔,作用于边和面。 ——proximity[pr?k's?m?t?]邻近:窄薄处、狭长的几何体处网格自动加密,如薄壁,但花费时间较多,网格数量增加较多,配合min size使用。控制面网格尺寸可起到相同细化效果。 hex dominant六面体主导:先生成四边形主导的网格,然后再得到六面体再按需要填充棱锥和四面体单元。 ——此方法对于不可扫掠的体,要得到六面体网格时推荐 ——对内部容积大的体有用 ——对体积和表面积比小的薄复杂体无用 ——对于CFD无边界层识别 ——主要对FEA分析有用 Automatic自动网格:在四面体网格(patch conforming考虑细节)和扫掠网格(sweep)之间自动切换。 2D Quadrilateral dominant [,kwɑdr?'l?t?r?l]四边形主导 triangles['tra???g(?)l]三角形
广州有道资料网https://www.doczj.com/doc/2816605764.html, ANSYS中简化模型和划分网格的方法 本文介绍了ANSYS中简化模型和划分网格的相关方法。 使在建立仿真模型时,经验是非常有助于用户决定哪些部件应该考虑因而必须建立在模型中,哪些部件不应该考虑因而不需建立到模型中,这就是所谓的模型简化。此外,网格划分也是影响分析精度的另外一个因素。本文将集中讨论如何简化模型以获得有效的仿真模型以及网格划分需要注意的一些问题。 理想情况下,用户都希望建立尽可能详细的仿真模型,而让仿真软件自己来决定哪些是主要的物理现象。然而,由于有限的计算机资源或算法限制,用户应该简化电磁仿真的模型。 模型简化 模型简化主要取决于结果参数及结构的电尺寸。例如,如果用户希望分析安装在某电大尺寸载体上的天线的远场方向图,那么模型上距离源区超过一个波长的一些小特征和孔径(最大尺度小于/50)就可以不考虑。另一方面,如果用户希望分析从源到用带有小孔的屏蔽面屏蔽的导线之间的耦合,那么必须对小孔、靠近源的屏蔽面以及导线进行精确建模。另外一个常用的简化是用无限薄的面来模拟有限厚度的导体面。一般而言,厚度小于/100的金属面都可以近似为无限薄的金属面。有限导电性和有限厚度的影响可以在SK卡中设置。对于比较厚的导体面,如果这种影响是次要的,那么用户仍然可以采取这种近似。例如,当建立大反射面天线的馈源喇叭模型时,喇叭壁的有限厚度对于反射面天线主波束的影响就是次要的。然而,如果喇叭天线用于校准标准时,那么喇叭壁的有限厚度就不能忽略。 网格划分 一般而言,网格划分的密度设置为最短波长的十分之一。然而,在电流或电荷梯度变化剧烈的区域,如源所在区域、曲面上的缝隙和曲面的棱边等,必须划分得更密。一个实用的指导原则是网格大小应该与结构间的间隔距离(d)相比拟(%26lt;=2d)。同样地,如果需要计算近场分布,那么网格大小应该同场点到源点间距离(d)相比拟。 总之,用户建立的几何模型应该抓住主要的物理现象,而网格划分则需要权衡输出结果相对于网格大小的收敛性。 广州有道资料网https://www.doczj.com/doc/2816605764.html,
第 3章 ANSYS 13.0 Workbench网格划分及操作案例 网格是计算机辅助工程(CAE)模拟过程中不可分割的一部分。网格直接影响到求解精 度、求解收敛性和求解速度。此外,建立网格模型所花费的时间往往是取得 CAE 解决方案所 耗费时间中的一个重要部分。因此,一个越好的自动化网格工具,越能得到好的解决方案。 3.1 ANSYS 13.0 Workbench 网格划分概述 ANSYS 13.0 提供了强大的自动化能力,通过实用智能的默认设置简化一个新几何体的网 格初始化,从而使得网格在第一次使用时就能生成。此外,变化参数可以得到即时更新的网 格。ANSYS 13.0 的网格技术提供了生成网格的灵活性,可以把正确的网格用于正确的地方, 并确保在物理模型上进行精确有效的数值模拟。 网格的节点和单元参与有限元求解,ANSYS 13.0在求解开始时会自动生成默认的网格。 可以通过预览网格,检查有限元模型是否满足要求,细化网格可以使结果更精确,但是会增 加 CPU 计算时间和需要更大的存储空间,因此需要权衡计算成本和细化网格之间的矛盾。在 理想情况下,我们所需要的网格密度是结果随着网格细化而收敛,但要注意:细化网格不能 弥补不准确的假设和错误的输入条件。 ANSYS 13.0 的网格技术通过 ANSYS Workbench的【Mesh】组件实现。作为下一代网格 划分平台, ANSYS 13.0 的网格技术集成 ANSYS 强大的前处理功能, 集成 ICEM CFD、 TGRID、 CFX-MESH、GAMBIT网格划分功能,并计划在 ANSYS 15.0 中完全整合。【Mesh】中可以根 据不同的物理场和求解器生成网格,物理场有流场、结构场和电磁场,流场求解可采用 【Fluent】、【CFX】、【POLYFLOW】,结构场求解可以采用显式动力算法和隐式算法。不同的 物理场对网格的要求不一样,通常流场的网格比结构场要细密得多,因此选择不同的物理场, 也会有不同的网格划分。【Mesh】组件在项目流程图中直接与其他 Workbench分析系统集成。 3.2 ANSYS 13.0 Workbench 网格划分 ANSYS 网格划分不能单独启动,只能在 Workbench 中调用分析系统或【Mesh】组件启 动,如图 3-1 所示。 图3-1 调入分析系统及网格划分组件
基于变分网格的曲面简化高效算法? 金勇, 吴庆标+, 刘利刚 (浙江大学数学系,浙江杭州 310027) An Efficient Method for Surface Simplification Based On Variational Shape Approximation* JIN Yong, WU Qing-biao+, LIU Li-gang (Department of Mathematics, Zhejiang University, Hangzhou 310027, China) + Corresponding author: E-mail:qbwu@https://www.doczj.com/doc/2816605764.html, Abstract:Providing fast and accurate simplification method for large polygon mesh is one of the most important research focuses in computer graphics. Approximating mesh model with a few polygons can improve the rendering speed, and reduce the storage of the model. The paper presents a local greedy algorithm to minimize the energy defined by variational shape approximation. The algorithm simplifies the mesh by controlling the number of the target polygons, while attempting to get ideal effect by adaptive seed triangles selection. The algorithm has intuitive geometric meaning. The method is efficient enough to be efficiently adopted in the geometric modeling system. Key words: Polygon mesh simplification; variational shape approximation; greedy algorithm; geometric modeling 摘要: 为大型的多边形网格模型提供快速、准确的简化算法是计算机图形学中的一个重要的研究方面.以较少的多边形逼近表示网格模型,能够提高模型的绘制速度,减小模型的存储空间.本文根据变分网格逼近表示所定义的全局误差能量,提出一种局部贪心优化算法,该算法通过控制目标网格分片数来简化网格,通过种子的自适应选取以达到理想的简化效果,具有直观的几何意义.本文方法计算量少,效率较高,能够有效应用于几何造型系统中. 关键词:多边形网格简化;变分网格逼近;贪心算法;几何造型 中图法分类号: TP391文献标识码: A 1 引言 三维多边形网格模型,包括三角形网格、四边形网格等,在计算机辅助几何设计、计算机动画、虚拟现实、计算机游戏和医学影像等领域有着大量的应用.随着三维扫描技术的发展,顶点数为数万的模型已经非常常见, ?Supported by the National Natural Science Foundation of China under Grant No.10871178, 60776799 (国家自然科学基金); Technology Department of Zhejiang Province Grant No. 2008C01048-3(浙江省重大科技创新项目) 作者简介: 金勇(1985-),男,上海人,博士研究生,主要研究领域为数字几何处理和计算机辅助几何设计;吴庆标(1963-),男, 浙江台州人,博士,教授,博士生导师,主要研究领域为图形与图像处理,数值计算方法,高性能并行计算和计算机模拟; 刘利刚(1975-),男,江西吉安人,博士,副教授,博士生导师,主要研究领域为数字几何处理,计算机辅助几何设计,计算机图形学和图像处理.
【分享】复杂几何模型的系列网格划分技术 众所周知,对于有限元分析来说,网格划分是其中最关键的一个步骤,网格划分的好坏直接影响到解算的精度和速度。在ANSYS中,大家知道,网格划分有三个步骤:定义单元属性(包括实常数)、在几何模型上定义网格属性、划分网格。在这里,我们仅对网格划分这个步骤所涉及到的一些问题,尤其是与复杂模型相关的一些问题作简要阐述。 一、自由网格划分 自由网格划分是自动化程度最高的网格划分技术之一,它在面上(平面、曲面)可以自动生成三角形或四边形网格,在体上自动生成四面体网格。通常情况下,可利用ANSYS的智能尺寸控制技术(SMARTSIZE命令)来自动控制网格的大小和疏密分布,也可进行人工设置网格的大小(AESIZE、LESIZE、KESIZE、ESIZE等系列命令)并控制疏密分布以及选择分网算法等(MOPT命令)。对于复杂几何模型而言,这种分网方法省时省力,但缺点是单元数量通常会很大,计算效率降低。同时,由于这种方法对于三维复杂模型只能生成四面体单元,为了获得较好的计算精度,建议采用二次四面体单元(92号单元)。如果选用的是六面体单元,则此方法自动将六面体单元退化为阶次一致的四面体单元,因此,最好不要选用线性的六面体单元(没有中间节点,比如45号单元),因为该单元退化后为线性的四面体单元,具有过刚的刚度,计算精度较差;如果选用二
次的六面体单元(比如95号单元),由于其是退化形式,节点数与其六面体原型单元一致,只是有多个节点在同一位置而已,因此,可以利用TCHG命令将模型中的退化形式的四面体单元变化为非退化的四面体单元,减少每个单元的节点数量,提高求解效率。在有些情况下,必须要用六面体单元的退化形式来进行自由网格划分,比如,在进行混合网格划分(后面详述)时,只有用六面体单元才能形成金字塔过渡单元。对于计算流体力学和考虑集肤效应的电磁场分析而言,自由网格划分中的层网格功能(由LESIZE命令的LAYER1和LAYER2域控制)是非常有用的。 二、映射网格划分 映射网格划分是对规整模型的一种规整网格划分方法,其原始概念是:对于面,只能是四边形面,网格划分数需在对边上保持一致,形成的单元全部为四边形;对于体,只能是六面体,对应线和面的网格划分数保持一致;形成的单元全部为六面体。在ANSYS中,这些条件有了很大的放宽,包括: 1 面可以是三角形、四边形、或其它任意多边形。对于四边以上的多边形,必须用LCCAT命令将某些边联成一条边,以使得对于网格划分而言,仍然是三角形或四边形;或者用AMAP命令定义3到4个顶点(程序自动将两个顶点之间的所有线段联成一条)来进行映射划分。 2 面上对边的网格划分数可以不同,但有一些限制条件。
第20卷第9期2008年9月 计算机辅助设计与图形学学报 JO U RN A L O F COM PU T ER AID ED D ESIG N &COM P U T ER G RA PH ICS Vo l.20,N o.9 Sep.,2008 收稿日期:2008-07-15.基金项目:国家 九七三 重点基础研究发展规划项目(2002CB312101,2006CB303102);国家自然科学基金(60603078);新世纪优秀人才项目(NCET 06 0516).赵 勇,男,1982年生,博士研究生,主要研究方向为数字几何处理.刘新国,男,1972年生,博士,教授,博士生导师,主要研究方向为数字几何处理、真实感绘制、虚拟现实等.彭群生,男,1947年生,博士,教授,博士生导师,CC F 高级会员,主要研究方向为真实感图形、虚拟现实、科学计算可视化等. 基于四面体控制网格的模型变形算法 赵 勇 刘新国 彭群生 (浙江大学CAD &CG 国家重点实验室 杭州 310058)(z haoyong@cad.z https://www.doczj.com/doc/2816605764.html,) 摘要 提出一种鲁棒的保体积保表面细节的模型变形算法.首先将输入模型嵌入到一个稀疏的四面体控制网格 中,并且通过一种改进的重心坐标来建立两者的对应关系;然后通过用户的交互,对控制网格建立一个二次非线性能量函数对其进行变形,而输入模型的变形结果则可以通过插值来直接获得.由于能量函数的优化是在控制网格上进行的,从而大大提高了算法的效率.与此同时,提出一种新的能量!!!Laplacian 能量,可以使四面体控制网格进行尽量刚性的变形,从而有效地防止了大尺度编辑过程中模型形状的退化现象.文中算法还具有通用性,可支持多种模型的表示方式,如三角网格模型、点模型等.实验结果表明,该算法可以有效地保持输入模型的几何细节、防止明显的体积变化,得到了令人满意的结果. 关键词 模型编辑;四面体控制网格;刚性变形;L aplacian 能量;通用性中图法分类号 T P391 Shape Deformation Based on Tetrahedral Control Mesh Zhao Yong Liu Xing uo Peng Qunsheng (S tate K ey L abor atory of CA D &CG ,Zh ej iang Univ ersity ,H ang z hou 310058) Abstract A robust shape deformation algo rithm w ith the feature o f both vo lum e and surface detail preserv ing is presented.Fir st,the input m odel is embedded into a coarse tetr ahedral co ntro l mesh,and the m odified bar ycentr ic coordinates are employ ed to establish their relationship.Then acco rding to user s editing,the contro l mesh is defor med by solving a quadric no nlinear ener gy m inimization pro blem,and the deform ation is passed to the embedded m odel by interpolatio n.As the optimization pro cess is applied to the control mesh composed of sparse vertices,the efficiency is g reatly improved.Meantime,w e incor porate a new energ y,called Laplacian energ y,into the energy equatio n to m ake the tetrahedral contro l m esh deform as rigidly as possible,thus avoiding shape degenerations even under ex treme editing.Our algor ithm acco mmodates various shape repr esentations,such as triangular meshes,point clouds etc.Experiments demonstrate that the Laplacian energy is very effective in preserv ing geom etric details and pr eventing unreasonable volume changes. Key words shape editing;tetrahedral contr ol m esh;r ig id defor matio n;Laplacian energ y;generality 近年来,随着三维数据采集技术的不断发展,三维数字几何模型已经在数字娱乐、工业设计、医学辅 助诊断、文物保护等很多领域得到了广泛的应用.数字几何处理作为计算机图形学的一个重要分支也得
转自宋博士的博客 如何在ANSYS WORKBENCH中划分网格经常有朋友问到这个问题。我整理了一下,先给出第一个入门篇,说明最基本的划分思路。以后再对某些专题问题进行细致阐述。 ANSYS WORKBENCH中提供了对于网格划分的几种方法,为了便于说明问题,我们首先创建一个简单的模型,然后分别使用几种网格划分方法对之划分网格,从而考察各种划分方法的特点。 1. 创建一个网格划分系统。 2. 创建一个变截面轴。 先把一个直径为20mm的圆拉伸30mm成为一个圆柱体 再以上述圆柱体的右端面为基础,创建一个直径为26mm的圆,拉伸30mm得到第二个圆柱体。 对小圆柱的端面倒角2mm。
退出DM. 3.进入网格划分程序,并设定网格划分方法。双击mesh进入到网格划分程序。 下面分别考察各种网格划分方法的特点。(1)用扫掠网格划分。 对整个构件使用sweep方式划分网格。
结果失败。 该方法只能针对规则的形体(只有单一的源面和目标面)进行网格划分。(2)使用多域扫掠型网格划分。 结果如下
可见ANSYS把该构件自动分成了多个规则区域,而对每一个区域使用扫略网格划分,得到了很规则的六面体网格。这是最合适的网格划分方法。 (3)使用四面体网格划分方法。 使用四面体网格划分,且使用patch conforming算法。 可见,该方式得到的网格都是四面体网格。且在倒角处网格比较细密。 其内部单元如下图(这里剖开了一个截面) 使用四面体网格划分,但是使用patch independent算法。忽略细节。
?、网格划分结果如下图 此时得到的仍旧是四面体网格,但是倒角处并没有特别处理。(4)使用自动网格划分方法。 得到的结果如下图
Ansys Workbench 划分网格 (张栋zd0561@https://www.doczj.com/doc/2816605764.html,) 1、对于三维几何体(对于三维几何体(3D 3D 3D) )有几种不同的网格化分方法。如图1下部所示。 图1网格划分的种类 1.1、Automatic(自动划分法) 1.2、Tetrahedron(四面体划分法) 它包括两种划分方法:Patch Conforming(A W 自带功能),Patch Independent(依靠ICEM CFD Tetra Algorithm 软件包来实现)。
步骤:Mesh(右键)——Insert——Method (操作区上方)Meshcontrl——Method (左下角)Scope——Geometry Method——Tetrahedrons(四面体网格) Algorithm——Patch Conforming (补充:Patch Independent该算法是基于Icem CFD Tetra的,Tetra部分具有膨胀应用,其对CAD许多面的修补均有用,包括碎面、短边、较差的面参数等。在没有载荷或命名选项的情况下,面和边无需考虑。) 图2四面体网格分两类
图3四面体划分法的参数设置 1.3、Hex Dominant(六面体主导法) 1.4、Sweep(扫掠划分法) 1.5、MultiZone(多区划分法) 2、对于面体或者壳二维几何 对于面体或壳二维(2D),A W有一下: Quad Dominant(四边形单元主导) Triangles(三角形单元) Uniform Quad/Tri(均匀四面体/三角形单元) Uniform Quad(均匀四边形单元) 3、网格参数设置 下图为缺省设置(Defaults)下的物理环境(Physics Preferance)
第15卷第l期2010年1月 中国图象图形学报 JoumalofImageandGraphics V01.15.No.1 Jan.20lO 基于形状修正的三角网格模型顶点法矢估算方法 彭育辉1’’2’高诚辉1’ ’(福州大学福建省制造业数字化设计工程研究中心,福州350002)2’(福州大学机械工程及自动化学院,福州350108) 摘要为了提高三角网格模型的顶点法矢计算的准确度和稳定性,提出了一种改进的基于三角形形状修正的法矢估算方法,并首先对具有代表性的5种顶点法矢估算方法进行了分析,通过比较各估算方法在顶角、面积等权重方面的处理特点及存在的缺陷,提出了一种评价因子对三角形形状质量进行量化,且在理论上给予了证明;然后据此对顶点法矢估算方法进行了改进;最后利用规则和不规则的二次曲面网格模型进行了实验验证,并以顶点法矢误差的算术平均值和标准方差来分别评价各种估算方法估算结果的准确度和稳定性。实验结果证明,该新方法较其他估算方法估算的顶点法矢精度更高,稳定性更好。 关键词形状修正三角网格法矢误差分析 中图法分类号:TP391.72文献标志码:A文章编号:1006.8961(20lO)01.0142-07 AnImproVedAlgorithmforVertex MeshesBased0nNormalCoInputationofTriangularShapeCorrection PENGYu-hui”?”,GAOCheng.hui2) ’(Dfg如nfD船喀n&n捃r扣r肘口n咖ct“地∥F啦,‘Pro口i腑,,%hoⅡ№池腊蚵,,乩祈oⅡ350002) 2’(cozze班矿||If8曲口厅池zE增in卵^,孵n,“A珊Dm口t幻n,Fu她oⅡ踟i俐1渺,,五瞄^DⅡ350108) AbstractAnimp∞vedalgorithmbasedoncorrectingtriangle8hapeispresentedt0improveaccumcyand8tabilityof computingvertexno瑚alof triangularmeshes.Fi玛dy,fiverepre8entationalalgorithmsareanalyzedbycomparingtheir weightingch8mcteri8tic8.Followingthat,aquantitativea88e8Bmentparametertoe8timatethequalityoftriangleBhapei8proposedanddemonstratedintheory,andthenweputforwardanimprovedequationtoamendtheinnuenceoftriangle¥hape.Finally.theanicletestsallalgorithm8withregularandirregul盯triangularmeshesofquadratic8u—.acesforeValuatingthealgorithm’saccuracyandstability.Experimentalresultsdemonstratetheimpmvedapproachi8ef艳ctive. Keywords8hapecorrection,triangularme8h,venexnomal,erroranalysis O引言 三角网格模型是3维空间中由一系列相互连接的三角形面片组成的一种曲面离散逼近的表达形式。由于三角形网格比四边形网格更为稳定,更能灵活反映实际曲面复杂的形貌,因此适用于任意分布的散乱数据点集,而且使得它在计算机图形学、计算机视觉、反求工程、快速原型制造等许多领域得到广泛应用。由于三角网格模型的顶点法矢表达了重 基金项目:国家自然科学基金项目(50605007);福建省重大科技项目(2007H2011);福建省教育厅科研资助项目(JA08028) 收稿日期:2008-07一09;改回日期:2009.Ol—16 第一作者简介:彭育辉(1975一)。男。2000年获南京理工大学车辆工程专业硕士学位,现为福州大学机械工程及自动化学院讲师,在职博士研究生。主要研究方向为反求工程、快速制造等。E-mail:pengyuhui@fzu.edu.cn。 通讯作者:高诚辉。E-mail:gch@fzu.edu.cn 万方数据
3 模型的网格划分 当用户点击Operation工具框中的Mesh命令按钮时,GAMBIT将打开Mesh子工具框。Mesh子工具框包含的命令按钮允许用户对于包括边界层、边、面、体积和组进行网格划分操作。 与每个Mesh子工具框命令设置相关的图标如下。 本章以下部分将详细说明与上面列举的每个命令按钮相关的命令。 3.1 边界层 3.1.1 概述 边界层确定在与边和/或者面紧邻的区域的网格节点的步长。它们用于初步控制网格密度从而控制相交区域计算模型中有效信息的数量。 示例 作为边界层应用的一个示例,考虑包括一个代表流体流过管内的圆柱的计算模型。在正常环境下,很可能在紧靠管道壁面的区域内流体速度梯度很大,而靠近管路中心很小。通
过对壁面加入一个边界层,用户可以增大靠近壁面区域的网格密度并减小靠近圆柱中心的网格密度——从而获得表征两个区域的足够的信息而不过分的增大模型中网格节点的总数。 一般参数 要确定一个边界层,用户必须设定以下信息: ?边界层附着的边或者面 ?确定边界层方向的面或者体积 ?第一列网格单元的高度 ?确定接下来每一列单元高度的扩大因子 ?确定边界层厚度的总列数 用户还可以设定生成过渡边界层——也就是说,边界层的网格节点类型随着每个后续层而变化。如果用户设定了这样一个边界层,用户必须同时设定以下信息: ?边界层过渡类型 ?过度的列数 3.1.2 边界层命令
生成边界层 Create Boundary Layer命令允许用户在一条边或者一个面附近定义网格节点步长。 要生成一个边界层,用户必须设定以下参数: ?定义 ?过渡特性 ?附着实体和方向 设定边界层定义 要定一边界层,用户必须设定两类特征: ?尺寸 ?内部连续性 ?角形状 尺寸特征包括诸如边界层列数以及第一列高度等因数。内部连续性特征确定边界层重叠在相邻边界层印记上的印记行为。角形状特征确定网格在连接边界层与附着边的Corner 或者Reversal点周围区域的网格形状。 设定尺寸特征 要设定边界层的尺寸特征,用户必须设定以下四个参数中的三个: ?第一列高度 ?增长因子 ?列数 ?总高度 上面列举的前三个参数定义如下(如图3-1): ?第一列高度(a)设定边界层附着的边或者面与网格节点第一个完整列之间的距离。 ?增长因子提供一个比例 b/a 其中b是第一和第二个完整列之间的距离,a是第一列高度。边界层中任意两列之间的距离等于前面两列之间的距离乘以增长因数。 ?列数(n)设定边界层中完整列的总数。 所有三个参数都影响边界层的总厚度(D)。
Gambit网格划分,交界面的的处理 2010-08-12 14:40 我们简单说分块划分网格,如果不定义边界,gambit会默认为interior。 interior是公共面(两个"体"共用) interface是接触面(两个面,分别属于不同的"体"):interface是处理滑移网格,静止部分与滑动部分的交接,也用于流体与固体耦合的时候用;还可以用来连接粗细不同的网格体。 若用split剖分体时,要选择“connected”选项,否则FLUENT会将交界面默认为壁面(wall)。 两个体的交界面重合的部分需要有流体流通,即不能用wall处理。这种情况有两种解决办法。 1:交界面重合部位有两个面,一个属于A,一个属于B,然后分别定义为interface(如名称为interface1和interface2),这两个面的网格不需要一致,然后到fluent里define/grid interface里将两个交界面create成一个。 2:(交界面必须一样大小)在gambit中选择geometry/face/connect faces 命令,激活virtual(Tolerance),激活T—Junctions,选择两个体的交界面,点击Apply。两个体的重合面线条颜色为粉红色,OK。然后可以进行体的网格划分。这样两个体的交界面重合部分网格一致,默认为interior,允许流体通过。 下面是CFD-Online上的一些说法,仅供参考。 the interface condition is needed for connecting different grid in a model, non matching interface, sliding mesh interface, and so on. Sliding mesh interface : use in the sliding mesh model, one part of the mesh will move regarding to the other. Different grid interface : for connecting different kind of grid without transition. for exemple, hexa with tetra without pyramidal element. Fluent interpolate the result a mesh interface from one grid to the other. Non matching interface : grid with diferent shape and/or with different position of their nodes. If you have the fluent tutorials take a look at the film cooling exemple. the interior condition is usefull if you have surfaces in you model which are part of the fluid. If you don't use interior condition gambit
血管模型网格划分 网格划分即将所用的模型划分为有限体积或单元,这里我们使用Ansys自身的网格划分器对提取出来的血管模型(STL格式的三维模型)进行网格划分。具体步骤为: 一、软件启动 单击开始---所有程序--Ansys14.0---Meshing---ICEM CFD 14.0。 二、模型导入 1、单击主菜单栏中的File---Import Geometry---STL,如下图: 主菜单烂
2、在下拉菜单对话框中选取血管模型并确定后,血管模型导入完成,如下图; 三、图形参数设置(封闭模型) 1、单击Geometry 工具栏中的Repair Geometry 图标,后单击Build Diagnostic 按钮单击Apply 按钮运行,如下图: 单击此处可调整显示边框与实体 Geometry 工具栏 Repair Geometry 按钮 单击此按钮后单击Apply 按钮 运行后端口显示封闭黄线
2、运行完成后,单击左侧工具栏中的Close Holes图标,然后单击鼠标图形按钮,而后单击模型端口处黄线并单击Apply运行,从而使模型端口封闭,模型有几个端口则反复操作几次,如下图: Close Holes按 钮运行结束 后端口封 闭 四、网格化分参数设置 1、单击Mesh工具栏的Compute Mesh按钮,选取Volume mesh按钮,后单击Compute按钮,而后单击YES按钮,进行初步的电脑网格划分; Mesh工具栏,Compute Mesh 按钮 单击此按钮,而后在下面的Mesh方法中选择,一般选择默 认的方法
运行结束后显示 网格 2、完成上步操作后,单击Mesh工具栏中的Globe mesh setup按钮,一般不更改默认设置,单击Apply按钮运行完成; 3、再次重复单击Compute Mesh按钮,后单击Apply按钮,而后单击YES按钮,进行初步的电脑网格划分,注:(1)可用多种方式进行划分而后单击融合操作,直至满意;(2)若模型有其他漏洞,程序会提示是否修复,一般选择不修复; 五、设置模型边界---共包括:出口端、入口端及墙壁 1、右键单击屏幕左侧控制树中的Part,在下拉菜单中选取Part create,而后在下面的窗口栏中Part部分对端口命名(如:input),然后在Creat Part by Selection部分单击鼠标箭头图形,再在浏览界面中左键单击所需设定的端口(如:输入端),注:只单击一次后进行下步操作,是否选中可能显示不明显,单击Apply运行完成此步操作; 2、依次完成输入端、输出端以及墙的设定。如下图:
科学与财富 0引言 近年来,随着计算机图形软硬件技术的提高及人们对绘制效果的要求越来越高,计算机图形学研究和应用呈现出场景对象越加复杂,对绘制真实感的要求越来越高,显示分辨率不断递增,模型趋于复杂化,数据精度要求较高等问题。基于此提出了提高绘制性能的主要途径:GPU加速技术,并行绘制技术,可见性剔除技术,网格简化技术,多分辨率绘制技术,存储访问优化技术,基于图像的绘制技术,图像和网格压缩技术,基于预计算的绘制技术等。 对于计算机硬件性能的不断提高,存储访问带宽与计算能力的差距越来越大,因此缓存访问效率成为影响应用程序运行效率的关键因素。而要改善缓存的性能有以下几种方法:①降低缓存访问失配率;②降低失配损失;③通过并行技术降低失配率或是失配损失;④减少命中缓存的时间。降低缓存访问失配率,可以从提高缓存硬件性能与编译优化等方面来解决,其原理是:通过调整指令顺序和数据的使用顺序,增强代码和数据使用的时间局部性和空间局部性特征,从而提高缓存命中率。体系结构方面,通过缓存硬件性能来提高缓存访问效率。应用程序方面,采用编译优化不需要修改或者增加硬件,可分为计算重排和数据重排。 计算重排,根据重新排列指令顺序,提高访问相同数据单元指令的局部性,通常由编译器对应用程序编译后的指令序列进行重排来完成,对于指令,重新组织程序而不影响程序的正确性。数据重排,根据指令对数据单元的访问方式求解出缓存连贯的数据排布,由应用程序直接对数据进行重排来完成,通过优化改善了数据的空间局部性和时间局部性[1]。目前网格排布优化技术是计算机图形学与可视化领域的重点研究方向之一,该技术基于数据重排,通过对网格图元的存储顺序进行重新排序,能够减少平均缓存访问失配率,提高大型三维网格模型和大规模虚拟场景的处理和绘制性能。 2网格排布优化技术 顶点缓存的访问性能通常用平均缓存失配率(ACMR)来衡量,定义为绘制每个三角形的平均缓存失配次数,即缓存的总失配次数与总访问次数之比,ACMR的取值范围为[0.5,3.0],因为每个顶点至少失配一次,至多失配三次。需要注意的是,ACMR无法达到最小值,主要是因为顶点缓存区容量的限制。若顶点缓存区可以装下所有顶点,则以任何方式组织的三角形都可以使ACMR接近于0.5。但是缓存容量很小,很难装下所有的顶点,并且网格的形状也会导致ACMR额外的开销。 2.2.1网格排布优化方法的分类 网格排布优化技术是图排布理论的应用与引伸,根据不同的划分方式可以将网格排布优化技术分成不同的类。根据求解技术手段的不同,网格排布优化技术可分为基于优化策略、基于空间填充曲线和基于谱序列三类[1],现代的GPU使用一个小的缓冲区来存储最近需要访问的顶点,为了最大化的利用好顶点缓存用于快速渲染的优点,对三角形进行重排序是必要的,基于优化策略即使用了这一优点。基于空间填充曲线是对二维或者三维规则网格单元的一种具有较好空间局部性的特殊线性遍历方法,是在某种程度上保留局部相关性的多维网格单元遍历。基于谱序列方法是通过特定的线性算子推导出相关的特征性、特征向量以及特征空间投影,并利用这些特征量和组合求解出问题。因为谱序列是求解图排布问题的一个有效引导策略,所以也可以应用到网格排布技术中。 根据网格描述方式的不同,可分为基于三角形、基于三角形条带、基于三角形扇[3],或者简单分为基于条带和基于非条带两种方式,每种描述方式又可分为索引形式和三角形汤形式。三角形扇和三角形条带类似,但是不如三角形条带灵活,所以很少使用。索引形式只需少量数据,传输代价小,使之成为目前使用最为普遍的方式,但顶点随机读取也带来了ACMR的增加。因此许多研究者提出对网格图元的存储顺序进行重新排布,可以减小 ACMR,降低顶点处理的运算量,提高渲染速度。 2.2.2三角形排布优化算法的介绍 为提高网格模型的处理和绘制性能,现代图形卡使用顶点缓冲器来提高顶点缓存命中率,使模型在绘制过程中减少发送的顶点数据。有效利用顶点缓冲器,在已有的图形绘制流水线基础上,通过重新排列网格模型图元的线性序列,增加缓存中顶点的命中率。下面对国内外几种常见的相关算法做一个简要的介绍。 Hoppe(Hoppe.1999)提出了一种贪心条带算法生成三角形序列[4],该算法是基于优化策略和三角形条带的研究,核心思想是沿着逆时针方向生成条带,进行三角形条带合并,在合并的过程中不断检测预期的ACMR。此算法针对一个预先指定的缓存大小,比如16,对算法进行优化求解,使用FI-FO策略对三角形进行重排,采用了三角形条带索引模式。Hoppe算法可以得到很低的平均缓存失配率,其运算时间复杂度高于O(m),该算法也存在一些待解决的问题,在网格的顶点索引中很难确定三角形的拓扑方向,对可能合并入条带的三角形进行ACMR的预估会增加算法的复杂度。Bogomjakov等人(2002)提出的面向具有任意大小的FIFO缓存的通用序列构造算法(称为BoG算法)[5],是一种最具代表性的空间填充曲线。该算法把Hilbert空间填充曲线和MLA空间填充曲线的应用推广到不规则三角网格,使用图划分软件包Metis将网格分成多个三角形簇,保证每个簇内三角形序列的ACMR最优,从而形成整个网格的ACMR最优化。该算法在相同缓存参数前提下,AMCR指比Hoppe算法增大20%左右,分割的切割边上的失配率对整体失配率有影响。 Lin等人(Lin and Thomas.2006)算法则是基于贪心优化策略的3D渲染多边形网格序列生成算法[6],该算法适用于非条带三角形的排布优化,可以应用于渐进网格,应用启发式条件对网格顶点进行全局搜索,同样可以得到很低的平均缓存失配率,其运算时间复杂度也高于O(m)。核心思想是赋予每个顶点一个缓存访问代价度量,选择代价度量最小的顶点作为当前输出顶点,找到与该顶点邻接的所有未输出三角形,按顺时针方向访问并逐一将这些三角形的顶点压入缓存中,最后以三角形环为单位逐一输出三角形,并在整个网格中对下一个需要输出的三角形环进行全局最优性搜索。Nehab等人(Nehab et al.2006)提出了一种多功能三角形序列重排算法[7],该算法不仅能减少顶点缓存的平均缓存失配率,而且能减少图元的重绘率(通过深度测试的片元总数与最终可见的像素总数之比),作者首先提出通过局部优化减少顶点处理时间,同时通过三角形序列重排减少像素处理时间是自相矛盾的,原因是基于视点的深度排序会毁掉顶点缓存性能,且局部优化会导致当前视点下的高度透支。基于此提出了基于优化策略的多功能三角形序列重排算法,实现两者之间的融合。 Sander等人(Sander et al.2009)对Lin等人算法进行了改进,使三角形排布适用于动态模型[8]。其核心思想是以顶点在缓存中的位置作为代价度量,选出代价度量最小的顶点作为当前顶点,即以三角形环作为计算单位,然后输出与该顶点邻接的所有未输出三角形(随机访问),与Lin等人算法 基于三维网格模型的网格排布优化技术综述 娄自婷 (云南师范大学信息学院,云南昆明650500) 摘要:网格排布优化技术通过对网格图元的存储顺序进行重新排序,能够减少平均缓存访问失配率,提高大型三维网格模型和大规模虚拟场景的处理和绘制性能。文中综述了网格排布优化技术的研究进展,分析比较了基于优化策略、基于空间填充曲线和基于谱序列的网格排布优化方法。 关键词:三维网格模型,网格排布优化;ACMR A Survey of mesh layout optimization for3D mesh models LOU Ziting (College of computer science and information technology,Yunnan Normal University,Kunming City Yunnan Province650500,China) Abstract:The mesh layout technology through storage order of the mesh primitive reorder,can reduce the average cache miss rate and improve the process-ing and rendering performance of large3D mesh models and large-scale virtual scene.This paper gives an introduction to advances in technology mesh layout optimization.We analyze and compare the mesh layout optimization method based optimization strategy,space-filling curve and spectral sequences. Keywords:3D mesh models,Mesh layout optimization;ACMR 科学论坛 536