Learning structured prediction models a large margin approach
- 格式:pdf
- 大小:209.90 KB
- 文档页数:8
自然语言处理学生力模型-概述说明以及解释1.引言1.1 概述概述是文章引言部分的一部分,它主要介绍了本文所要讨论的主题:自然语言处理学生力模型。
自然语言处理是一门研究如何让计算机能够理解和处理人类语言的学科。
随着人工智能的发展和应用的广泛化,自然语言处理变得越来越重要。
学生力模型(Student Models)则是自然语言处理中的一个重要概念。
它是指通过构建计算机模型来模拟人类学习和理解语言的过程。
学生力模型可以帮助我们更好地理解和分析文本,判断文本的情感倾向,提取关键信息等。
通过学生力模型,我们可以使计算机系统能够更接近人类的理解能力,进而实现自然语言处理的目标。
本篇文章将以自然语言处理学生力模型为主题,详细介绍学生力模型的概念和原理,以及它在自然语言处理中的应用。
文章将从理论和实践的角度出发,探讨学生力模型在文本处理、情感分析、问答系统等方面的应用,并总结其优势和局限性。
在全面介绍学生力模型后,本文将着眼于对学生力模型未来发展的展望。
随着深度学习等技术的不断进步,学生力模型在自然语言处理领域的应用前景将更加广阔。
最后,文章将给出对学生力模型的总结和结论。
通过本篇文章的阅读,读者将对自然语言处理学生力模型有更深入的了解,同时能够了解到学生力模型在实际应用中的潜力和局限性。
进一步探讨和研究学生力模型的发展将有助于推动自然语言处理领域的进步,更好地应用于实际场景。
1.2 文章结构本文将按照以下结构来呈现关于自然语言处理学生力模型的论述。
首先,在引言部分,将对本文的整体内容进行概述,包括对自然语言处理和学生力模型的简要介绍,并明确文章的目的。
接下来,在正文部分,将详细讨论自然语言处理的定义和背景,包括自然语言处理的基本概念和发展历程,以便读者对该领域有一个全面的了解。
随后,将介绍学生力模型的概念和原理,包括其由来、基本原理以及相关理论支持。
同时,还将探讨学生力模型在自然语言处理中的具体应用,例如自动问答系统、文本摘要、机器翻译等,以及学生力模型在这些应用中的作用和优势。

基于多尺度跨模态特征融合的图文情感分类模型1. 内容综述随着深度学习技术的发展,计算机视觉领域中的情感分类模型已经取得了显著的成果。
现有的情感分类模型在处理跨模态数据时仍然面临一些挑战,例如文本和图像之间的语义不匹配、特征提取不足等问题。
为了解决这些问题,本文提出了一种基于多尺度跨模态特征融合的图文情感分类模型。
该模型首先将输入的文本和图像分别进行特征提取,然后通过多尺度特征融合的方式将不同尺度的特征进行整合。
本文采用了卷积神经网络(CNN)和循环神经网络(RNN)相结合的方式进行特征提取。
CNN 主要用于提取图像特征,而RNN则用于处理文本序列。
在特征融合过程中,本文采用了注意力机制(Attention Mechanism)来实现不同尺度特征之间的关联性。
通过一个全连接层将整合后的特征进行分类,得到最终的情感分类结果。
为了验证本文提出的模型的有效性,我们在多个公开的情感分类数据集上进行了实验,并与其他经典方法进行了比较。
实验结果表明,本文提出的基于多尺度跨模态特征融合的图文情感分类模型在各个数据集上均取得了较好的性能,有效解决了现有方法在处理跨模态数据时面临的问题。
1.1 背景与意义随着互联网的普及和多媒体技术的发展,图文信息在人们生活中占据了越来越重要的地位。
情感分析作为自然语言处理领域的一个重要分支,旨在识别和分析文本中的主观信息,对于理解用户需求、调整产品和服务以及维护用户关系具有重要意义。
传统的基于文本的情感分析方法往往忽略了图文之间的关联性,导致对情感的判断不够准确和全面。
为了解决这一问题,本文提出了一种基于多尺度跨模态特征融合的图文情感分类模型。
该模型通过结合文本和图像信息,充分利用跨模态特征,提高情感分类的准确性。
多尺度特征融合能够捕捉不同尺度下的信息,使得模型具有更强的表征能力。
本文的研究不仅有助于提高图文情感分析的性能,而且对于丰富和完善自然语言处理技术具有重要的理论意义和应用价值。
多模态预训练模型综述多模态预训练模型综述引言近年来,随着大数据时代的来临和深度学习的发展,以图像为主的多模态数据在各个领域的应用日益增多。
为了从多模态数据中挖掘更丰富的信息,多模态预训练模型成为了研究热点。
本文将对多模态预训练模型的发展历程、应用领域以及存在的问题进行综述。
一、多模态预训练模型的发展历程1. 单模态预训练模型在多模态预训练模型的发展历程中,单模态预训练模型是起点。
早期的单模态预训练模型主要用于图像、语音和自然语言处理任务。
其中,深度自编码器(Deep Autoencoder)和自编码器变体(如稀疏自编码器、降噪自编码器等)是常用的单模态预训练模型。
这些模型通过学习输入数据的低维表示,并通过解码器重构输入数据,从而实现特征提取和数据重建。
2. 多模态融合模型随着多模态数据的广泛应用,多模态融合模型被提出来处理多模态数据。
多模态融合模型主要包括基于矩阵分解的方法和基于神经网络的方法。
基于矩阵分解的方法将多模态数据表示为低秩矩阵分解的形式,并通过对应的优化算法进行近似求解。
基于神经网络的方法则利用神经网络结构实现多模态信息的融合。
3. 多模态预训练模型随着深度学习的快速发展,多模态预训练模型成为了研究热点。
其中最具代表性的是Deep Cross-Modal ProjectionLearning (CMPL)模型和Probability Based Cross-Modal Supervised Pretraining (PACM)模型。
CMPL模型通过设计适用于多模态数据的损失函数,将多模态数据映射到一个共享的嵌入空间中。
PACM模型则通过利用多模态数据的概率分布信息训练模型,实现特征提取和信息融合。
二、多模态预训练模型的应用领域1. 视觉与语言任务多模态预训练模型在视觉与语言任务中有广泛的应用,如图像与文本的匹配、图像生成描述等。
其中,通过使用预训练模型,在图像生成描述任务中可以实现更准确和更具语义的描述生成。
融合动态掩码注意力与多教师多特征知识蒸馏的文本分类
王润周;张新生;王明虎
【期刊名称】《中文信息学报》
【年(卷),期】2024(38)3
【摘要】知识蒸馏技术可以将大规模模型中的知识压缩到轻量化的模型中,在文本分类任务中实现更高效的推断。
现有的知识蒸馏方法较少同时考虑多种教师与多个特征层之间的信息融合。
此外,蒸馏过程采用全局填充,未能动态关注数据中的有效信息。
为此,该文提出一种融合动态掩码注意力机制与多教师多特征知识蒸馏的文
本分类模型,不仅引入多种教师模型(RoBERTa、Electra)的知识源,还兼顾不同教师模型在多个特征层的语义信息,并通过设置动态掩码模型注意力机制使得蒸馏过程
动态关注不等长数据,减少无用填充信息的干扰。
在4种公开数据集上的实验结果
表明,经过蒸馏后的学生模型(TinyBRET)在预测性能上均优于其他基准蒸馏策略,并在采用教师模型1/10的参数量、约1/2的平均运行时间的条件下,取得与两种教
师模型相当的分类结果,平均准确率仅下降4.18%和3.33%,平均F 1值仅下降2.30%和2.38%。
其注意力热度图也表明动态掩码注意力机制切实加强关注了数据尾部
与上下文信息。
【总页数】17页(P113-129)
【作者】王润周;张新生;王明虎
【作者单位】西安建筑科技大学管理学院
【正文语种】中文
【中图分类】TP391
【相关文献】
1.融合知识图谱与注意力机制的短文本分类模型
2.融合知识感知与双重注意力的短文本分类模型
3.结合注意力转移与特征融合算法的在线知识蒸馏
4.融合多教师模型的知识蒸馏文本分类
因版权原因,仅展示原文概要,查看原文内容请购买。

多模态机器学习中的迁移学习与领域自适应第一章引言多模态机器学习是一种涉及多种数据类型的机器学习方法,它可以同时处理图像、文本、语音等多种数据。
随着互联网的迅速发展,我们可以轻松地获得各种类型的数据。
然而,这些数据往往是异构的,即它们具有不同的特征和表示方式。
这就给多模态机器学习带来了挑战。
迁移学习和领域自适应是两个重要的技术,在解决多模态机器学习中的挑战方面发挥着重要作用。
第二章迁移学习迁移学习是一种通过利用一个领域上已有知识来改善另一个领域上任务性能的技术。
在多模态机器学习中,我们可以通过将已有知识从一个或多个源任务中迁移到目标任务上来改善目标任务性能。
这样做可以减少目标任务上所需样本数量,提高模型泛化能力。
2.1 迁移学习方法在迁移学习中,有几种常见方法可以用于将源任务知识应用于目标任务。
其中一种方法是基于特征的方法,它将源任务的特征表示应用于目标任务。
另一种方法是基于模型的方法,它将源任务的模型应用于目标任务。
还有一种方法是基于关系的方法,它通过学习源任务和目标任务之间的关系来进行迁移。
2.2 迁移学习应用迁移学习在多模态机器学习中有广泛的应用。
例如,在图像识别中,我们可以通过将在大规模图像数据集上训练得到的特征表示迁移到目标图像识别任务上来提高性能。
在语音识别中,我们可以利用已有语音数据集上训练得到的声学模型来改善目标语音识别性能。
第三章领域自适应领域自适应是一种通过利用已有领域上已有知识来改善另一个领域上性能的技术。
在多模态机器学习中,我们可以利用已有领域数据和知识来改善目标领域上性能。
3.1 领域自适应方法在领域自适应中,常见的方法包括特征选择、特征映射和实例选择等。
特征选择是通过选择与目标领域相关的特征来改善性能。
特征映射是通过将源领域的特征映射到目标领域来改善性能。
实例选择是通过选择与目标领域相似的实例来改善性能。
3.2 领域自适应应用领域自适应在多模态机器学习中也有广泛的应用。
基于3D CNN-DDPG端到端无人驾驶控制李国豪【摘要】文中基于希望直接应用低成本可见光摄像头解决无人驾驶中的刹车、油门和转向控制的问题为目的,采用了深度卷积神经网络和深度确定性策略梯度强化学习结合的方法.通过加入三维卷积神经网络,学习出连续的车辆摄像头视觉感知视频图像帧中的时序属性特征,使得智能体能够利用时序特性更平稳和安全得控制车辆.在开源无人驾驶仿真平台TORCS上进行实验,得出三维卷积神经网络和深度强化学习结合的方法对解决无人驾驶中的控制问题提供了可行性的方案结论.【期刊名称】《电子设计工程》【年(卷),期】2018(026)022【总页数】5页(P156-159,168)【关键词】无人驾驶;深度强化学习;计算机视觉;神经网络【作者】李国豪【作者单位】中国科学院上海微系统与信息技术研究所上海200050;中国科学院微小卫星创新研究院上海201210;上海科技大学信息科学与技术学院,上海201210;中国科学院大学北京100049【正文语种】中文【中图分类】TN911.73近年来随着机器学习算法的快速发展,人们的生活方式逐渐变得越来越智能化,其中自动驾驶技术也得到了学术界、工业界和政府的大力关注和支持。
应用人工智能技术解决自动驾驶汽车、无人机中的问题变得越来越重要。
据世界卫生组织报道,每年有近1.25百万的交通事故造成了人员死亡。
其中很多事故都是由于司机的失误或者是可以防止的事故造成。
无人驾驶技术有望能减少人为失误防止一些可避免事故的发生,故无人驾驶的研究对社会的贡献是毋庸置疑的。
但是因为在无人驾驶实际运用中,由于驾驶环境复杂,高精度激光雷达传感器的成本高,无人驾驶的研究存在很多挑战。
目前由于深度学习和强化学习的人工智能技术的发展,应用低成本视觉摄像头基于计算机视觉算法解决无人驾驶中控制问题的研究成为无人驾驶领域中的重要的研究方向之一[19-22]。
1 端到端自动驾驶越来越多的研究把机器学习算法应用到控制中,我们可以通过机器学习的方法来训练智能体(例如车辆,无人机,游戏智能体等)在未知的环境中完成导航任务。
基于智能体的生物群体动力学模型研究一、引言生物群体动力学模型,动态演化系统中的模拟与可视化技术之一,是物理学、心理学、生物学、哲学等多学科交叉的研究领域。
它综合运用现代计算机科学、计算方法,以及自然界动态演化的规律与特征相结合,通过模拟大规模群体的行为活动,探索现实世界中的复杂现象与规律。
智能体技术作为该领域的重要技术手段之一,将群体中每个个体作为一个自主、灵活的智能体来处理,并将智能体的集合视为一个生物群体。
在智能体技术的基础上,又出现了基于智能体的生物群体动力学模型,它结合了自然界动态演化的规律与特征,精确模拟了生物群体在不同场景中的行为与活动。
因此,本文的内容主要介绍基于智能体的生物群体动力学模型的研究现状和发展趋势。
二、基于智能体的生物群体动力学模型概述1、生物群体动力学模型基本知识生物群体动力学模型,简称Boids模型,是由Craig Reynolds在1986年首次提出的。
该模型基于对鸟類,魚群等生物大群集合行動的研究而形成。
它的基本思想是将大规模群体的行为活动用简单的规则去描述。
Boids模型主要包括三个方面,即分离、聚集和对齐。
分离:每只Boid会避免与其它Boid碰撞或进入其它的危险区域。
聚集:每只Boid会朝向自己距离较近的Boid群体的质心移动。
对齐:每只Boid会朝向自己距离较近的Boid群体的平均方向移动。
Boids模型的优点在于其简单、易于实现和扩展,并可以模拟多种生物群体的活动规律,例如鸟群、鱼群、羊群等。
但Boids模型也存在一些问题,例如模拟精度较低、计算效率较慢等,限制了其应用范围。
2、基于智能体的生物群体动力学模型的发展历程基于智能体的生物群体动力学模型是Boids模型的升级版。
它采用基于智能体的模式,将群体中每个个体视为一个自主、灵活的智能体进行处理。
每个智能体具有自我判断、自我决策和自我适应的能力,并且可以直接与其它智能体进行交互。
基于智能体的生物群体动力学模型最早起源于人工生命领域。
基于词汇树层次语义模型的图像检索算法
张月辉;吴健;陆姗姗;崔志明
【期刊名称】《微电子学与计算机》
【年(卷),期】2012(29)11
【摘要】解决语义鸿沟必须建立图像低层特征到高层语义的映射,针对此问题,本文提出了一种基于词汇树层次语义模型的图像检索方法.首先提取图像包含颜色信息的SIFT特征来构造图像库的特征词汇树,生成描述图像视觉信息的视觉词汇.并在此基础上利用Bayesian决策理论实现视觉词汇到语义主题信息的映射,进而构造了一个层次语义模型,并在此模型基础上完成了基于内容的语义图像检索算法.通过检索过程中用户的相关反馈,不仅可以加入正反馈图像扩展图像查询库,同时能够修正高层语义映射.实验结果表明,基于该模型的图像检索算法性能稳定,并且随着反馈次数的增加,检索效果明显提升.
【总页数】5页(P172-176)
【关键词】词汇树;语义主题信息;层次语义模型;语义映射;图像检索
【作者】张月辉;吴健;陆姗姗;崔志明
【作者单位】苏州大学智能信息处理及应用研究所
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于主题层次树和语义向量空间模型的用户建模 [J], 胡吉明;胡昌平
2.基于多层次概念语义网络结构的中文医学信息语义标引体系和语义检索模型研究[J], 李毅;庞景安
3.基于ISODATA聚类的词汇树图像检索算法 [J], 张婷;戴芳;郭文艳
4.基于多层次视觉语义特征融合的图像检索算法 [J], 张霞;郑逢斌
5.基于语义绑定的分层视觉词汇库的图像检索 [J], 傅光磊;孙锬锋;蒋兴浩
因版权原因,仅展示原文概要,查看原文内容请购买。
pretrain 和sft两个步骤的训练一、预训练(Pretrain)预训练是一种深度学习的方法,主要是在大规模无标签数据上进行训练,然后将其应用于有标签的数据集上。
预训练的目的是通过训练一个大的神经网络来学习有用的特征表示,这些特征表示可以在不同的任务和数据集上使用。
在自然语言处理领域,预训练通常是指利用大量的无标签文本数据来训练一个模型,该模型能够理解和生成自然语言文本。
预训练通常使用无监督学习算法,其中最常用的是自编码器(Autoencoder)和语言模型(Language Model)。
自编码器通过将输入数据编码为一个低维的向量,然后从该向量重构输入数据,从而学习数据的表示。
语言模型则是预测给定前文之后的下一个词的概率分布,从而学习语言的内在结构和语义信息。
二、自监督学习(Self-Supervised Learning,SFT)自监督学习是一种机器学习方法,它利用无标签数据进行训练,通过预测输入数据的某个变换后的版本或者某个相关任务来学习有用的特征表示。
在自然语言处理领域,自监督学习通常是指利用大量的无标签文本数据来训练模型,该模型能够完成诸如文本分类、命名实体识别等任务。
自监督学习的常见方法包括:1)文本分类:给定一个文本集合,将每个文本标记为其所属的类别;2)命名实体识别(NER):识别文本中的特定实体,如人名、地名、组织机构名等;3)关系抽取:从文本中抽取实体之间的关系;4)问答系统:针对给定的问题,从文本中找出答案;5)对话生成:根据给定的对话上下文生成下一个回复等。
三、Pretrain和SFT的关系预训练和自监督学习是深度学习中两种重要的方法,它们之间的关系密不可分。
预训练通常是指在大规模的无标签数据上进行训练,学习有用的特征表示。
而自监督学习则是利用无标签数据来完成某个相关任务,从而学习特征表示。
在自然语言处理领域,预训练通常是指利用大量的无标签文本数据来训练一个模型,该模型能够理解和生成自然语言文本。
bnlearn.structure_learning.fit原理-概述说明以及解释1.引言1.1 概述在贝叶斯网络(Bayesian networks)中,结构学习是一项重要的任务,它的目的是从数据中推断出概率图模型的结构,即节点之间的依赖关系。
在实际应用中,结构学习可以帮助我们理解变量之间的因果关系,进行概率推断和决策分析。
bnlearn是一个R语言的包,提供了丰富的功能用于贝叶斯网络的建模和分析。
其中,structure_learning.fit函数是用于进行结构学习的核心函数之一。
本文将详细介绍bnlearn包以及structure_learning.fit函数的原理和用法,帮助读者更好地理解和应用贝叶斯网络在数据分析和建模中的作用。
1.2 文章结构本文主要分为引言、正文和结论三部分。
在引言部分,我们将对整篇文章进行概述,并介绍文章的结构和目的。
在正文部分,我们首先会介绍bnlearn包的基本情况,然后重点讨论结构学习fit原理,以及详细解释bnlearn.structure_learning.fit函数的用法和功能。
最后,在结论部分,我们将总结文章要点,探讨结论的应用意义,并展望未来可能的研究方向。
通过对这些内容的分析和解释,读者可以更全面地了解bnlearn.structure_learning.fit的原理和应用。
1.3 目的本文旨在深入探讨bnlearn包中的结构学习fit原理,通过对bnlearn.structure_learning.fit函数的详细解析,帮助读者更好地理解如何使用这一功能来构建贝叶斯网络模型。
同时,通过对结构学习fit原理的介绍,读者可以了解到在贝叶斯网络中如何根据数据拟合出最符合实际情况的网络结构,从而为实际问题的建模与分析提供更为有效的工具和方法。
通过本文的阐述,读者可以更深入地了解贝叶斯网络的结构学习过程,为进一步的研究和应用提供参考和指导。
2.正文2.1 bnlearn包介绍bnlearn是一个用于贝叶斯网络建模和分析的R包,提供了一系列功能来帮助用户进行概率图模型的学习和推断。
基于句法决策树和SVM的短文本语境识别模型王峥;刘师培;彭艳兵【期刊名称】《计算机与现代化》【年(卷),期】2017(000)003【摘要】随着社会生活网络化的日趋成熟,在很多研究和商业领域里都遇到了中文文本处理问题.不断深化的文本分类研究需要从文本的各个方面来解析文本信息,语义解析是文本挖掘的关键技术,语境识别可以应用在许多文本挖掘技术中,比如情感分析、舆情分析等.基于句法决策树、N-gram模型的特征要素提取方法和SVM分类器,提出一种语境分类模型,解决字词在不同语境下的多义性问题.该模型具有良好的泛化能力,在批量处理时具有很好的通用效果,能比较有效地解决文本挖掘中语境识别难题.%With the increasing maturity of the networked social life, many fields such as research and commerce have encountered the problems of processing Chinese texts.Parsing the texts from all aspects is necessary for the increasingly deepening research of text classification.On the one hand, semantic parsing is essential to text mining.On the other hand, context recognition can be widely applied in numerous text mining problems, such as sentiment analysis, public feeling analysis and so on.In this paper, a context classification model is proposed based on syntactic decision trees, N-gram feature extraction and SVM classifiers to recognize the different meanings of the same words under different short contexts.The results show that the proposed model, which can batch process data, hasfavorable generalization ability, indicating that the model can solve the problems of context recognition efficiently.【总页数】5页(P13-17)【作者】王峥;刘师培;彭艳兵【作者单位】烽火通信科技股份有限公司南京研发部,江苏南京 210019;武汉邮电科学研究院,湖北武汉 430074;烽火通信科技股份有限公司南京研发部,江苏南京210019【正文语种】中文【中图分类】TP393【相关文献】1.一种基于语义与句法结构的短文本相似度计算方法 [J], 赵谦;荆琪;李爱萍;段利国2.基于短文本信息流的回顾式话题识别模型 [J], 周泓;刘金岭;王新功3.基于决策树算法的水位观测干扰识别模型 [J], 尹晶飞; 张明; 沈钰; 严俊峰; 徐梦林4.基于TFIDF和梯度提升决策树的短文本分类研究 [J], 刘春磊; 梁瑞斯; 邸元浩5.基于梯度提升决策树的气体传感器阵列识别模型研究 [J], 董晓睿因版权原因,仅展示原文概要,查看原文内容请购买。
基于人工智能和机器学习技术的蛋白质结构预测和分子设计研究在当代生物医学领域,人工智能和机器学习技术的应用已经变得越来越流行。
其中,蛋白质结构预测和分子设计研究是两个领域中最为重要的应用之一。
蛋白质是生物体中最为重要的分子之一,其结构决定了其功能。
在生物医学领域中,通过预测蛋白质结构和设计分子,可以加速制药过程并开发新的药物。
然而,传统的蛋白质结构预测和分子设计方法需要大量的实验室测试和计算时间,效率低且成本高。
因此,人工智能和机器学习技术的应用可以提高这些过程的效率和准确性。
机器学习是一种人工智能的分支,它可以通过电脑程序来理解和分析数据以及自动完成特定任务。
在蛋白质结构预测和分子设计研究中,机器学习算法可以学习蛋白质和分子的特性,通过模拟和预测进行结构分析和变化,从而提高预测和设计的准确性。
在当前的研究中,基于人工神经网络的机器学习算法已经被广泛应用于蛋白质结构预测和分子设计研究中。
这些神经网络可以在训练过程中自动学习数据的特征,然后预测蛋白质的结构或设计分子。
经过专家验证,这些神经网络的预测准确性已经超过了传统的方法。
除了基于人工神经网络的机器学习算法,其他机器学习技术也被应用于蛋白质结构预测和分子设计研究中。
例如,基于支持向量机的算法可以用于分类和回归分析。
这些算法可以预测蛋白质的结构或分子的性质,并帮助研究人员优化药物设计过程。
尽管目前人工智能和机器学习技术在蛋白质结构预测和分子设计研究中取得了显著的成果,但它们仍然面临一些挑战。
例如,准确的训练数据集非常重要,而且需要大量的计算资源和数据存储来训练这些算法。
此外,应用于生物医学领域的机器学习算法需要一定的生物学和化学知识背景,以便正确理解和解释结果。
总的来说,人工智能和机器学习技术的应用对蛋白质结构预测和分子设计研究领域的发展具有重要的影响。
这些技术可以大大加速和提高这些过程的效率和准确性,并为药物研发和治疗提供更好的基础。
未来,这些技术将继续发展和创新,为人类的健康做出更多的贡献。
foundation models的学术定义Foundation models是指一类基础模型,它们具备广泛的预训练能力和适应性,可用于解决各种自然语言处理(NLP)任务。
这些模型通常采用了深度学习技术,通过大量的数据预训练来学习语言的语义和规律。
Foundation models通常包含大型的神经网络结构,拥有数以亿计的参数。
它们利用Transformer等先进的架构来处理输入文本,通过自监督预训练任务来学习语言表示。
预训练中,模型通常要通过自编码器任务、掩码语言建模等方式预测输入文本中的部分内容,以学习词汇、上下文信息和语义知识。
这类模型在预训练完成后,可进行微调或迁移学习,用于特定的下游任务,如文本分类、情感分析、命名实体识别等。
通过在大规模数据集上进行预训练,foundation models能够学习到丰富的词汇和语言表达能力,从而在较小的数据集上表现出色。
Foundation models的出现极大地推动了自然语言处理领域的发展。
它们在语义理解、信息抽取、问答系统等任务上取得了重大突破,并在各种应用中显示出强大的潜力。
研究人员和工程师可以基于foundation models构建更复杂和高效的NLP 应用,为数据挖掘、信息检索、智能助手等领域带来巨大的价值。
然而,foundation models也面临一些挑战。
由于其庞大的模型规模和高计算成本,对硬件资源要求较高。
另外,由于foundation models的预训练数据通常来自于大规模的互联网文本,存在一定的偏差性和隐私问题,需要制定合理的数据采集和处理策略。
总之,foundation models作为一类基础模型,在NLP领域发挥着重要作用。
它们通过预训练学习了丰富的语言表示,可用于解决多样化的自然语言处理任务,为各种应用带来了前所未有的效果和便利。
随着技术的不断进步,我们有望看到更强大和更智能的foundation models的出现,推动NLP领域的进一步发展。
深度增强学习方向论文整理责编:王艺一. 开山鼻祖DQNPlaying Atari with Deep Reinforcement Learning,V. Mnih et al., NIPS Workshop, 2013.Human-level control through deep reinforcement learning, V. Mnih et al., Nature, 2015.二. DQN的各种改进版本(侧重于算法上的改进)Dueling Network Architectures for Deep Reinforcement Learning. Z. Wang et al., arXiv, 2015.Prioritized Experience Replay, T. Schaul et al., ICLR, 2016.Deep Reinforcement Learning with Double Q-learning, H. van Hasselt et al., arXiv, 2015.Increasing the Action Gap: New Operators for Reinforcement Learning, M. G. Bellemare et al., AAAI, 2016.Dynamic Frame skip Deep Q Network, A. S. Lakshminarayanan et al., IJCAI Deep RL Workshop, 2016.Deep Exploration via Bootstrapped DQN, I. Osband et al., arXiv, 2016.How to Discount Deep Reinforcement Learning: Towards New Dynamic Strategies, V. Fran?ois-Lavet et al., NIPS Workshop, 2015.Learning functions across many orders of magnitudes,H Van Hasselt,A Guez,M Hessel,D SilverMassively Parallel Methods for Deep Reinforcement Learning, A. Nair et al., ICML Workshop, 2015.State of the Art Control of Atari Games using shallow reinforcement learningLearning to Play in a Day: Faster Deep Reinforcement Learning by Optimality Tightening(11.13更新)Deep Reinforcement Learning with Averaged Target DQN(11.14更新)三. DQN的各种改进版本(侧重于模型的改进)Deep Recurrent Q-Learning for Partially Observable MDPs, M. Hausknecht and P. Stone, arXiv, 2015.Deep Attention Recurrent Q-NetworkControl of Memory, Active Perception, and Action in Minecraft, J. Oh et al., ICML, 2016.Progressive Neural NetworksLanguage Understanding for Text-based Games Using Deep Reinforcement LearningLearning to Communicate to Solve Riddles with Deep Distributed Recurrent Q-NetworksHierarchical Deep Reinforcement Learning: Integrating TemporalAbstraction and Intrinsic MotivationRecurrent Reinforcement Learning: A Hybrid Approach四. 基于策略梯度的深度强化学习深度策略梯度:End-to-End Training of Deep Visuomotor PoliciesLearning Deep Control Policies for Autonomous Aerial Vehicles with MPC-Guided Policy SearchTrust Region Policy Optimization深度行动者评论家算法:Deterministic Policy Gradient AlgorithmsContinuous control with deep reinforcement learningHigh-Dimensional Continuous Control Using Using Generalized Advantage EstimationCompatible Value Gradients for Reinforcement Learning of Continuous Deep PoliciesDeep Reinforcement Learning in Parameterized Action SpaceMemory-based control with recurrent neural networksTerrain-adaptive locomotion skills using deep reinforcement learningCompatible Value Gradients for Reinforcement Learning of Continuous Deep PoliciesSAMPLE EFFICIENT ACTOR-CRITIC WITH EXPERIENCE REPLAY(11.13更新)搜索与监督:End-to-End Training of Deep Visuomotor PoliciesInteractive Control of Diverse Complex Characters with Neural Networks连续动作空间下探索改进:Curiosity-driven Exploration in DRL via Bayesian Neuarl Networks结合策略梯度和Q学习:Q-PROP: SAMPLE-EFFICIENT POLICY GRADIENT WITH AN OFF-POLICY CRITIC(11.13更新)PGQ: COMBINING POLICY GRADIENT AND Q-LEARNING(11.13更新)其它策略梯度文章:Gradient Estimation Using Stochastic Computation GraphsContinuous Deep Q-Learning with Model-based AccelerationBenchmarking Deep Reinforcement Learning for Continuous Control Learning Continuous Control Policies by Stochastic Value Gradients五. 分层DRLDeep Successor Reinforcement LearningHierarchical Deep Reinforcement Learning: Integrating Temporal Abstraction and Intrinsic MotivationHierarchical Reinforcement Learning using Spatio-Temporal Abstractions and Deep Neural NetworksStochastic Neural Networks for Hierarchical Reinforcement Learning –Authors: Carlos Florensa, Yan Duan, Pieter Abbeel (11.14更新)六. DRL中的多任务和迁移学习ADAAPT: A Deep Arc hitecture for Adaptive Policy Transfer from Multiple SourcesA Deep Hierarchical Approach to Lifelong Learning in MinecraftActor-Mimic: Deep Multitask and Transfer Reinforcement Learning Policy DistillationProgressive Neural NetworksUniversal Value Function ApproximatorsMulti-task learning with deep model based reinforcement learning (11.14更新)Modular Multitask Reinforcement Learning with Policy Sketches (11.14更新)七. 基于外部记忆模块的DRL模型Control of Memory, Active Perception, and Action in Minecraft Model-Free Episodic Control八. DRL中探索与利用问题Action-Conditional Video Prediction using Deep Networks in Atari GamesCuriosity-driven Exploration in Deep Reinforcement Learning viaBayesian Neural NetworksDeep Exploration via Bootstrapped DQNHierarchical Deep Reinforcement Learning: Integrating Temporal Abstraction and Intrinsic MotivationIncentivizing Exploration In Reinforcement Learning With Deep Predictive ModelsUnifying Count-Based Exploration and Intrinsic Motivation#Exploration: A Study of Count-Based Exploration for Deep Reinforcemen Learning(11.14更新)Surprise-Based Intrinsic Motivation for Deep Reinforcement Learning(11.14更新)九. 多Agent的DRLLearning to Communicate to Solve Riddles with Deep Distributed Recurrent Q-NetworksMultiagent Cooperation and Competition with Deep Reinforcement Learning十. 逆向DRLGuided Cost Learning: Deep Inverse Optimal Control via Policy OptimizationMaximum Entropy Deep Inverse Reinforcement LearningGeneralizing Skills with Semi-Supervised Reinforcement Learning (11.14更新)十一. 探索+监督学习Deep learning for real-time Atari game play using offline Monte-Carlo tree search planningBetter Computer Go Player with Neural Network and Long-term PredictionMastering the game of Go with deep neural networks and tree search, D. Silver et al., Nature, 2016.十二. 异步DRLAsynchronous Methods for Deep Reinforcement LearningReinforcement Learning through Asynchronous Advantage Actor-Critic on a GPU(11.14更新)十三:适用于难度较大的游戏场景Hierarchical Deep Reinforcement Learning: Integrating Temporal Abstraction and Intrinsic Motivation, T. D. Kulkarni et al., arXiv, 2016.Strategic Attentive Writer for Learning Macro-ActionsUnifying Count-Based Exploration and Intrinsic Motivation十四:单个网络玩多个游戏Policy DistillationUniversal Value Function ApproximatorsLearning values across many orders of magnitude十五:德州pokerDeep Reinforcement Learning from Self-Play in Imperfect-Information GamesFictitious Self-Play in Extensive-Form GamesSmooth UCT search in computer poker十六:Doom游戏ViZDoom: A Doom-based AI Research Platform for Visual Reinforcement LearningTraining Agent for First-Person Shooter Game with Actor-Critic Curriculum LearningPlaying FPS Games with Deep Reinforcement LearningLEARNING TO ACT BY PREDICTING THE FUTURE(11.13更新)Deep Reinforcement Learning From Raw Pixels in Doom(11.14更新)十七:大规模动作空间Deep Reinforcement Learning in Large Discrete Action Spaces十八:参数化连续动作空间Deep Reinforcement Learning in Parameterized Action Space十九:Deep ModelLearning Visual Predictive Models of Physics for Playing BilliardsJ. Schmidhuber, On Learning to Think: Algorithmic Information Theory for Novel Combinations of Reinforcement Learning Controllersand Recurrent Neural World Models, arXiv, 2015. arXiv Learning Continuous Control Policies by Stochastic Value GradientsData-Efficient Learning of Feedback Policies from Image Pixels using Deep Dynamical ModelsAction-Conditional Video Prediction using Deep Networks in Atari GamesIncentivizing Exploration In Reinforcement Learning With Deep Predictive Models二十:DRL应用机器人领域:Trust Region Policy OptimizationTowards Vision-Based Deep Reinforcement Learning for Robotic Motion ControlPath Integral Guided Policy SearchMemory-based control with recurrent neural networksLearning Hand-Eye Coordination for Robotic Grasping with Deep Learning and Large-Scale Data CollectionLearning Deep Neural Network Policies with Continuous Memory StatesHigh-Dimensional Continuous Control Using Generalized Advantage EstimationGuided Cost Learning: Deep Inverse Optimal Control via PolicyOptimizationEnd-to-End Training of Deep Visuomotor PoliciesDeepMPC: Learning Deep Latent Features for Model Predictive ControlDeep Visual Foresight for Planning Robot MotionDeep Reinforcement Learning for Robotic ManipulationContinuous Deep Q-Learning with Model-based AccelerationCollective Robot Reinforcement Learning with Distributed Asynchronous Guided Policy SearchAsynchronous Methods for Deep Reinforcement LearningLearning Continuous Control Policies by Stochastic Value Gradients机器翻译:Simultaneous Machine Translation using Deep Reinforcement Learning目标定位:Active Object Localization with Deep Reinforcement Learning目标驱动的视觉导航:Target-driven Visual Navigation in Indoor Scenes using Deep Reinforcement Learning自动调控参数:Using Deep Q-Learning to Control Optimization Hyperparameters人机对话:Deep Reinforcement Learning for Dialogue GenerationSimpleDS: A Simple Deep Reinforcement Learning Dialogue System Strategic Dialogue Management via Deep Reinforcement Learning Towards End-to-End Learning for Dialog State Tracking and Management using Deep Reinforcement Learning视频预测:Action-Conditional Video Prediction using Deep Networks in Atari Games文本到语音:WaveNet: A Generative Model for Raw Audio文本生成:Generating Text with Deep Reinforcement Learning 文本游戏:Language Understanding for Text-based Games Using Deep Reinforcement Learning无线电操控和信号监控:Deep Reinforcement Learning Radio Control and Signal Detection with KeRLym, a Gym RL AgentDRL来学习做物理实验:LEARNING TO PERFORM PHYSICS EXPERIMENTS VIA DEEP REINFORCEMENT LEARNING(11.13更新)DRL加速收敛:Deep Reinforcement Learning for Accelerating the Convergence Rate(11.14更新)利用DRL来设计神经网络:Designing Neural Network Architectures using Reinforcement Learning(11.14更新)Tuning Recurrent Neural Networks with Reinforcement Learning (11.14更新)Neural Architecture Search with Reinforcement Learning(11.14更新)控制信号灯:Using a Deep Reinforcement Learning Agent for Traffic Signal Control(11.14更新)二十一:其它方向避免危险状态:Combating Deep Reinforcement Learning’s Sisyphean Curse with I ntrinsic Fear (11.14更新)DRL中On-Policy vs. Off-Policy 比较:On-Policy vs. Off-Policy Updates for Deep Reinforcement Learning(11.14更新)130+位讲师,16大分论坛,中国科学院院士陈润生、滴滴出行高级副总裁章文嵩、联想集团高级副总裁兼CTO芮勇、上交所前总工程师白硕等专家将亲临2016中国大数据技术大会,票价折扣即将结束,预购从速。
《基于知识增强的预训练语言模型》1. 引言在当今信息爆炸的时代,人工智能技术的快速发展使得预训练语言模型成为了自然语言处理领域的热门话题。
基于知识增强的预训练语言模型,作为一种结合了领域知识和大规模语料训练的模型,在提高自然语言处理任务效果方面具有重要意义。
本文将从深度和广度两个方面对基于知识增强的预训练语言模型进行全面评估,并撰写一篇有价值的文章。
2. 基于知识增强的预训练语言模型的定义基于知识增强的预训练语言模型是一种结合了领域知识和大规模语料训练的模型,通过对知识图谱、语义网络等知识库的引入,使得模型具有更深层次的理解能力和表达能力,从而在自然语言处理任务中取得更好的效果。
3. 深度探讨基于知识增强的预训练语言模型在深度探讨基于知识增强的预训练语言模型时,我们需要从模型的结构、训练方式、知识引入方式、应用场景等方面进行详细分析。
模型的结构应该包括了传统预训练语言模型的基础上增加的知识引入部分,以及如何将领域知识融入到模型中的具体方式。
训练方式是指在训练模型时如何有效地结合领域知识和语料信息进行训练,以达到知识增强的效果。
知识引入方式则是关于知识库如何与模型进行对接,如何进行知识图谱的对齐等技术细节。
应用场景则是关于基于知识增强的预训练语言模型在自然语言处理任务中所具有的优势和应用前景。
4. 广度探讨基于知识增强的预训练语言模型在广度探讨基于知识增强的预训练语言模型时,我们需要对该模型在自然语言处理领域的广泛应用进行探讨。
主要包括但不限于文本分类、情感分析、问答系统、语义理解等多个方面。
通过对这些应用场景的深入分析,可以更好地理解基于知识增强的预训练语言模型在不同任务中的效果和优势。
5. 对基于知识增强的预训练语言模型的个人观点和理解在我看来,基于知识增强的预训练语言模型是自然语言处理领域的一个重要突破。
通过将领域知识融入到模型中,使得模型在理解和表达上更加准确和丰富,从而在各种自然语言处理任务中取得更好的效果。
自组织特征映射神经网络在说话人识别中的应用
王婧;张良
【期刊名称】《科技信息》
【年(卷),期】2009(000)001
【摘要】Mel频率倒谱系数MFCC在说话人识别中已被广泛使用.本文以MFCC 为声音信号的特征参数提取的标准.识别部分采用自组织神经网络的方法进行建模,实验结果表明该方法有较高的识别率.
【总页数】2页(P435-436)
【作者】王婧;张良
【作者单位】中国地质大学机械与电子信息学院,湖北武汉430074;中国地质大学机械与电子信息学院,湖北武汉430074
【正文语种】中文
【中图分类】TP3
【相关文献】
1.自组织特征映射神经网络方法在水文分区中的应用 [J], 张静怡;陆桂华;徐小明
2.自组织特征映射神经网络在薄板冲压中的应用 [J], 杨征宇;常思勤
3.自组织特征映射神经网络在土壤分类中的应用 [J], 李萍
4.自组织特征映射神经网络在说话人识别中的应用 [J], 王婧; 张良
5.自组织特征映射神经网络在测井岩性识别中的应用 [J], 张治国;杨毅恒;夏立显因版权原因,仅展示原文概要,查看原文内容请购买。
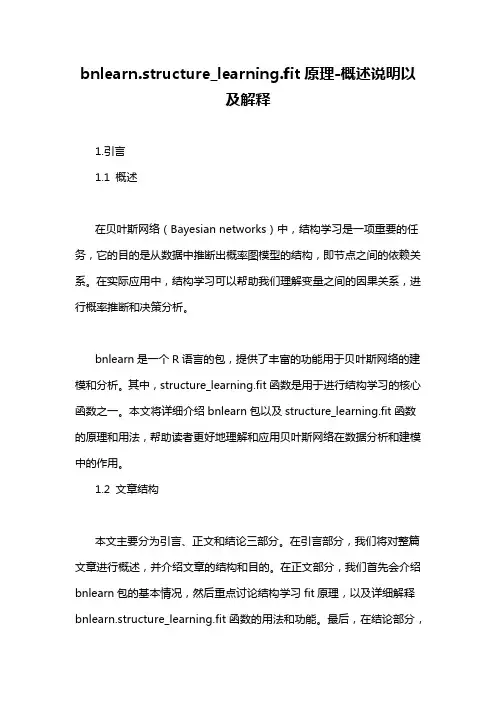
Learning Structured Prediction Models:A Large Margin ApproachBen Taskar taskar@ Electrical Engineering and Computer Science,UC Berkeley,Berkeley,CA94720Vassil Chatalbashev vasco@ Daphne Koller koller@ Computer Science,Stanford University,Stanford,CA94305Carlos Guestrin guestrin@ Computer Science,Carnegie Mellon University,Pittsburgh,PA15213AbstractWe consider large margin estimation in abroad range of prediction models where infer-ence involves solving combinatorial optimiza-tion problems,for example,weighted graph-cuts or matchings.Our goal is to learn pa-rameters such that inference using the modelreproduces correct answers on the trainingdata.Our method relies on the expressivepower of convex optimization problems tocompactly capture inference or solution op-timality in structured prediction models.Di-rectly embedding this structure within thelearning formulation produces concise convexproblems for efficient estimation of very com-plex and diverse models.We describe exper-imental results on a matching task,disulfideconnectivity prediction,showing significantimprovements over state-of-the-art methods.1.IntroductionStructured prediction problems arise in many tasks where multiple interrelated decisions must be weighed against each other to arrive at a globally satisfactory and consistent solution.In natural language process-ing,we often need to construct a global,coherent anal-ysis of a sentence,such as its corresponding part-of-speech sequence,parse tree,or translation into an-other language.In computational biology,we analyze genetic sequences to predict3D structure of proteins,find global alignment of related DNA strings,and rec-ognize functional portions of a genome.In computer vision,we segment complex objects in cluttered scenes, Appearing in Proceedings of the22st International Confer-ence on Machine Learning,Bonn,Germany,2005.Copy-right2005by the author(s)/owner(s).reconstruct3D shapes from stereo and video,and track motion of articulated bodies.Many prediction tasks are modeled by combinato-rial optimization problems;for example,alignment of2D shapes using weighted bipartite point match-ing(Belongie et al.,2002),disulfide connectivity pre-diction using weighted non-bipartite matchings(Baldi et al.,2004),clustering using spanning trees and graph cuts(Duda et al.,2000),and other combinatorial and graph structures.We define a structured model very broadly,as a scoring scheme over a set of combina-torial structures and a method offinding the highest scoring structure.The score of a model is a function of the weights of vertices,edges,or other parts of a struc-ture;these weights are often represented as parametric functions of a set of input features.The focus of this paper is the task of learning this parametric scoring function.Our training data consists of instances la-beled by a desired combinatorial structure(matching, cut,tree,etc.)and a set of input features to be used to parameterize the scoring rmally,the goal is tofind parameters of the scoring function such that the highest scoring structures are as close as possible to the desired structures on the training instances. Following the lines of the recent work on maximum margin estimation for probabilistic models(Collins, 2002;Altun et al.,2003;Taskar et al.,2003),we present a discriminative estimation framework for structured models based on the large margin princi-ple underlying support vector machines.The large-margin criterion provides an alternative to proba-bilistic,likelihood-based estimation methods by con-centrating directly on the robustness of the decision boundary of a model.Our framework defines a suite of efficient learning algorithms that rely on the expressive power of convex optimization problems to compactly capture inference or solution optimality in structuredmodels.We present extensive experiments on disulfideconnectivity in protein structure prediction showingsuperior performance to state-of-the-art methods. 2.Structured modelsAs a particularly simple and relevant example,con-sider modeling the task of assigning reviewers to pa-pers as a maximum weight bipartite matching prob-lem,where the weights represent the“expertise”ofeach reviewer for each paper.More specifically,sup-pose we would like to have R reviewers per paper,andthat each reviewer be assigned at most P papers.Foreach paper and reviewer,we have a score s jk indicat-ing the qualification level of reviewer j for evaluatingpaper k.Our objective is tofind an assignment forreviewers to papers that maximizes the total weight.We represent a matching using a set of binary vari-ables y jk that are set to1if reviewer j is assigned topaper k,and0otherwise.The score of an assignmentis the sum of edge scores:s(y)= jk s jk y jk.We de-fine Y to be the set of bipartite matchings for a givennumber of papers,reviewers,R and P.The maximumweight bipartite matching problem,arg max y∈Y s(y),can be solved using a combinatorial algorithm or thefollowing linear program:max jk s jk y jk(1) s.t. j y jk=R, k y jk≤P,0≤y jk≤1.This LP is guaranteed to have integral(0/1)solutions (as long as P and R are integers)for any scoring func-tion s(y)(Schrijver,2003).The quality of the assignment found depends criti-cally on the choice of weights that define the objective.A simple scheme could measure the“expertise”as the percent of word overlap in the reviewer’s home page and the paper’s abstract.However,we would want to weight certain words more heavily(words that are relevant to the subject and infrequent).Constructing and tuning the weights for a problem is a difficult and time-consuming process to perform by hand.Let webpage(j)denote the bag of words occurring in the home page of reviewer j and abstract(k)denote the bag of words occurring in the abstract of paper k.Then let x jk denote the intersection of the bag of words occurring in webpage(j)∩abstract(k).We can let the score s jk be simply s jk= d w d1I(word d∈x jk),a weighted combination of overlapping words(where1I(·) is the indicator function).Define f d(x jk)=1I(word d∈x jk)and f d(x,y)= jk y jk1I(word d∈x jk),the num-ber of times word d was in both the web page of a reviewer and the abstract of the paper that were matched in y.We can represent the objective s(y)as a weighted combination of a set of features w⊤f(x,y), where w is the set of parameters,f(x,y)is the set of features.We develop a large margin framework for learning the parameters of such a model from train-ing data,in our example,paper-reviewer assignments from previous years.In general,we consider prediction problems in which the input x∈X is an arbitrary structured object and the output is a vector of values y=(y1,...,y Lx),for example,a matching or a cut in the graph.We assume that the length L x and the structure of y depend deter-ministically on the input x.In our bipartite matching example,the output space is defined by the number of papers and reviewers as well as R and P.Denote the output space for a given input x as Y(x)and the entire output space is Y= x∈X Y(x).We assume that we can define the output space for a structured example x using a set of constraint functions:g d(x,y):X×Y→I R such that Y(x)={y:g(x,y)≤0}.The class of structured prediction models H we con-sider is the linear family:h w(x)=arg maxy:g(x,y)≤0w⊤f(x,y),(2)where f(x,y)is a vector of functions f:X×Y→I R n. This formulation is very general;clearly,for many f,g pairs,finding the optimal y is intractable.We focus our attention on models where this optimization prob-lem can be solved in polynomial time.Such problems include:probabilistic models such as certain types of Markov networks and context-free grammars;combi-natorial optimization problems such as min-cut and matching;and convex optimization problems such as linear,quadratic and semi-definite programming.In intractable cases,such as certain types of matching and graph cuts,we can use an approximate polyno-mial time optimization procedure that provides up-per/lower bounds on the solution.3.Max-margin estimationOur input consists of a set of training instances S={(x(i),y(i))}m i=1,where each instance consists of a structured object x(i)(such as a graph)and a tar-get solution y(i)(such as a matching).We develop methods forfinding parameters w such that:arg maxy∈Y(i)w⊤f(x(i),y)≈y(i),∀i,where Y(i)={y:g(x(i),y)≤0}.Note that the solu-tion space Y(i)depends on the structured object x(i); for example,the space of possible matchings depends on the precise set of nodes and edges in the graph,as well as on the parameters R and P.We describe two general approaches to solving this problem,and apply them to bipartite and non-bipartite matchings.Both of these approaches define a convex optimization problem forfinding such param-eters w.This formulation provides an effective and exact polynomial-time algorithm for many variants of this problem.Moreover,the reduction of this task to a standard convex optimization problem allows the use of highly optimized off-the-shelf software.Our framework extends the max-margin formula-tion for Markov networks(Taskar et al.,2003;Taskar et al.,2004a)and context free grammars(Taskar et al., 2004b),and is similar to other formulations(Altun et al.,2003;Tsochantaridis et al.,2004).As in the univariate prediction,we measure the er-ror of prediction using a loss functionℓ(y(i),y).In structured problems,where we are jointly predicting multiple variables,the loss is often not just the simple 0-1loss.For structured prediction,a natural loss func-tion is a kind of Hamming distance between y(i)and h(x(i)):the number of variables predicted incorrectly. We can express the requirement that the true struc-ture y(i)is the optimal solution with respect to w for each instance i as:min 12||w||2(3)s.t.w⊤f i(y(i))≥w⊤f i(y)+ℓi(y),∀i,∀y∈Y(i),whereℓi(y)=ℓ(y(i),y),and f i(y)=f(x(i),y).We can interpret1||w||w⊤[f i(y(i))−f i(y)]as the mar-gin of y(i)over another y∈Y(i).The constraints en-force w⊤f i(y(i))−w⊤f i(y)≥ℓi(y),so minimizing||w|| maximizes the smallest such margin,scaled by the loss ℓi(y).We assume for simplicity that the features are rich enough to satisfy the constraints,which is analo-gous to the separable case formulation in SVMs.We can add slack variables to deal with the non-separable case;we omit details for lack of space.The problem with Eq.(3)is that it has i|Y(i)|lin-ear constraints,which is generally exponential in L i, the number of variables in y i.We present two equiva-lent formulations that avoid this exponential blow-up for several important structured models.4.Min-max formulationWe can rewrite Eq.(3)by substituting a single max constraint for each i instead of|Y(i)|linear ones:min 12||w||2(4)s.t.w⊤f i(y(i))≥maxy∈Y(i)[w⊤f i(y)+ℓi(y)],∀i.The above formulation is a convex quadratic programin w,since max y∈Y(i)[w⊤f i(y)+ℓi(y)]is convex in w(maximum of affine functions is a convex function).The key to solving Eq.(4)efficiently is the loss-augmented inference max y∈Y(i)[w⊤f i(y)+ℓi(y)].Thisoptimization problem has precisely the same form asthe prediction problem whose parameters we are try-ing to learn—max y∈Y(i)w⊤f i(y)—but with an ad-ditional term corresponding to the loss function.Evenif max y∈Y(i)w⊤f i(y)can be solved in polynomial timeusing convex optimization,tractability of the loss-augmented inference also depends on the form of theloss termℓi(y).In this paper,we assume that the lossfunction decomposes over the variables in y(i).A nat-ural example of such a loss function is the Hammingdistance,which simply counts the number of variablesin which a candidate solution y differs from the targetoutput y(i).Assume that we can reformulate loss-augmented in-ference as a convex optimization problem in terms of aset of variablesµi,with an objective f i(w,µi)concaveinµi and subject to convex constraints g i(µi):maxy∈Y(i)[w⊤f i(y)+ℓi(y)]=maxµi: g i(µi)≤0 f i(w,µi).(5)We call such formulation concise if the numberof variablesµi and constraints g i(µi)is polyno-mial in L i,the number of variables in y(i).Notethat maxµi: g i(µi)≤0 f i(w,µi)must be convex in w,as Eq.(4)is.Likewise,we can assume that it is feasi-ble and bounded if Eq.(4)is.For example,the Hamming loss for bipartite match-ings counts the number of different edges in the match-ings y and y(i):ℓH i(y)= jk1I(y jk=y(i)jk)=RN(i)p− jk y jk y(i)jk,where the last equality follows from the fact that anyvalid matching for training example i has R reviewersfor N(i)p papers.Thus,the loss-augmented matchingproblem can be then written as an LP inµi similarto Eq.(1)(without the constant term RN(i)p):max jkµi,jk[w⊤f(x(i)jk)−y(i)jk]s.t. jµi,jk=R, kµi,jk≤P,0≤µi,jk≤1.In terms of Eq.(5), f i and g i are affine inµi:f i(w,µi)=RN(i)p+ jkµi,jk[w⊤f(x(i)jk)−y(i)jk]andg i(µi)≤0⇔ jµi,jk=R, kµi,jk≤P,0≤µi,jk≤1.Generally,when we can express max y ∈Y (i )w ⊤f (x (i ),y )as an LP,we have a sim-ilar LP for the loss-augmented inference:d i +max (F i w +c i )⊤µi s .t .A i µi ≤b i ,µi ≥0,(6)for appropriately defined d i ,F i ,c i ,A i ,b i ,which de-pend only on x (i ),y (i ),f (x ,y )and g (x ,y ).Note that w appears only in the objective.In cases (such as these)where we can formulate the loss-augmented inference as a convex optimization problem as in Eq.(4),and this formulation is concise,we can use Lagrangian duality (see (Boyd &Vanden-berghe,2004)for an excellent review)to define a joint,concise convex problem for estimating the parameters w .The Lagrangian associated with Eq.(4)isL i,w (µi ,λi )= f i (w ,µi )−λ⊤i gi (µi ),(7)where λi ≥0is a vector of Lagrange multipliers,onefor each constraint function in gi (µi ).Since we assume that f i (w ,µi )is concave in µi and bounded on the non-empty set {µi : gi (µi )≤0},we have strong duality :max µi : g i (µi )≤0f i (w ,µi )=min λi ≥0max µi L i,w (µi ,λi ).For many forms of fand g ,we can write the La-grangian dual min λi ≥0max µi L i,w (µi ,λi )explicitly as:min h i (w ,λi )s .t .q i (w ,λi )≤0,(8)where h i (w ,λi )and q i (w ,λi )are convex in both w and λi .(We folded λi ≥0into q i (w ,λi )for brevity.)Since the original problem had polynomial size,the dual is polynomial size as well.For example,the dual of the LP in Eq.(6)is d i +min b ⊤i λis .t .A ⊤i λi ≥F i w +c i ,λi ≥0,(9)where h i (w ,λi )=d i +b ⊤i λi and q i (w ,λi )≤0is{F i w +c i −A ⊤i λi ≤0,−λi ≤0}.Plugging Eq.(8)into Eq.(4),we get min 12||w ||2(10)s .t .w ⊤f i (y (i ))≥min q i (w ,λi )≤0h i (w ,λi ),∀i.We can now combine the minimization over λwith minimization over w .The reason for this is that if the right hand side is not at the minimum,the constraint is tighter than necessary,leading to a suboptimal solu-tion w .Optimizing jointly over λas well will produce a solution to w that is optimal.min 12||w ||2(11)s .t .w ⊤f i (y (i ))≥h i (w ,λi ),∀i ;q i (w ,λi )≤0,∀i.Hence we have a joint and concise convex optimiza-tion program for estimating w .The exact form of thisprogram depends strongly on fand g .For our LP-based example,we have a QP with linear constraints:min 12||w ||2(12)s .t .w ⊤f i (y (i ))≥d i +b ⊤i λi ,∀i ;A ⊤i λi ≥F i w +c i ,∀i ;λi ≥0,∀i.This formulation generalizes the idea used by Taskaret al.(2004a)to provide a polynomial time estimation procedure for a certain family of Markov networks;it can also be used to derive the max-margin formula-tions of Taskar et al.(2003);Taskar et al.(2004b).5.Certificate formulationIn the previous section,we assumed a concise con-vex formulation of the loss-augmented max in Eq.(4).There are several important combinatorial problems which allow polynomial time solution yet do not have a concise convex optimization formulation.For exam-ple,a maximum weight spanning tree and perfect non-bipartite matching problems can be expressed as linear programs with exponentially many constraints,but no polynomial formulation as a convex optimization prob-lem is known (Schrijver,2003).Both of these prob-lems,however,can be solved in polynomial time using combinatorial algorithms.In some cases,though,we can find a concise certificate of optimality that guaran-tees that y (i )=arg max y [w ⊤f i (y )+ℓi (y )]without ex-pressing loss-augmented inference as a concise convex program.Intuitively,verifying that a given assignment is optimal can be easier than actually finding one.As a simple example,consider the maximum weight spanning tree problem.A basic property of a spanning tree is that cutting any edge (j,k )in the tree creates two disconnected sets of nodes (V j [jk ],V k [jk ]),where j ∈V j [jk ]and k ∈V k [jk ].A spanning tree is opti-mal with respect to a set of edge weights if and only if for every edge (j,k )in the tree connecting V j [jk ]and V k [jk ],the weight of (j,k )is larger than (or equal to)the weight of any other edge (j ′,k ′)in the graph with j ′∈V j [jk ],k ′∈V k [jk ](Schrijver,2003).These con-ditions can be expressed using linear inequality con-straints on the weights.More generally,suppose that we can find a concise convex formulation of these conditions via a polyno-mial (in L i )set of functions q i (w ,νi ),jointly con-vex in w and auxiliary variables νi such that for fixed w ,∃νi :q i (w ,νi )≤0⇔∀y ∈Y (i ):w ⊤f i (y (i ))≥w ⊤f i (y )+ℓi (y ).Then min 12||w ||2such that q i (w ,νi )≤0for all i is a joint convex program in w ,νthat computes the max-margin parameters.Expressing the spanning tree optimality does not re-quire additional variablesνi,but in other problems, such as in perfect matching optimality(see below), such auxiliary variables are needed.Consider the problem offinding a matching in a non-bipartite graph;we begin by considering perfect matchings,where each node has exactly one neighbor, and then provide a reduction for the non-perfect case (each node has at most one neighbor).Let M be a perfect matching for a complete undirected graph G=(V,E).In an alternating cycle/path in G with respect to M,the edges alternate between those that belong to M and those that do not.An alternating cycle is augmenting with respect to M if the score of the edges in the matching M is smaller that the score of the edges not in the matching M.Theorem5.1(Edmonds,1965)A perfect matching M is a maximum weight perfect matching if and only if there are no augmenting alternating cycles.The number of alternating cycles is exponential in the number of vertices,so simply enumerating all of them is infeasible.Instead,we can rule out such cycles by considering shortest paths.We begin by negating the score of those edges not in M.In the discussion below we assume that each edge score s jk has been modified this way.We also refer to the score s jk as the length of the edge jk.An alternating cycle is augmenting if and only if its length is negative.A condition ruling out negative length alternating cycles can be stated succinctly using a type of distance function.Pick an arbitrary root node r. Let d e j,with j∈V,e∈{0,1},denote the length of the shortest distance alternating path from r to j,where e=1if the last edge of the path is in M,0otherwise. These shortest distances are well-defined if and only if there are no negative alternating cycles.The following constraints capture this distance function.s jk≥d0k−d1j,s jk≥d0j−d1k,∀jk/∈M;(13) s jk≥d1k−d0j,s jk≥d1j−d0k,∀jk∈M. Theorem5.2There exists a distance function{d e j} satisfying the constraints in Eq.(14)if and only if no augmenting alternating cycles exist.The proof is presented in Taskar(2004),Chap.10.In our learning formulation,assuming Hamming loss,we have the loss-augmented edge weights s(i)jk=(2y(i)jk −1)(w⊤f(x jk)+1−2y(i)jk),where the(2y(i)jk−1)term in front negates the score of edges not in the matching.Let d i be a vector of distance variables d e j, F i and G i be matrices of coefficients and q i be a vector such that F i w+G i d i≥q i represents the constraints in Eq.(14)for example i.Then the following joint convex program in w and d(with d i playing the role ofνi)computes the max-margin parameters: min12||w||2s.t.F i w+G i d i≥q i,∀i.(14) If our features are not rich enough to predict the train-ing data perfectly,we can introduce a slack variable vector to allow violations of the constraints.The case of non-perfect matchings can be handled by a reduction to perfect matchings as follows(Schrijver, 2003).We create a new graph by making a copy of the nodes and the edges and adding edges between each node and the corresponding node in the copy.We extend the matching by replicating its edges in the copy and for each unmatched node,introduce an edge to its copy.We define f(x jk)≡0for edges between the original and the copy.Perfect matchings in this graph projected onto the original graph correspond to non-perfect matchings in the original graph.6.Duals and kernelsBoth the min-max formulation and the certificate formulation produce primal convex optimization prob-lems.Rather than solving them directly,we consider their dual versions.In particular,as in SVMs,we can use the kernel trick in the dual to efficiently learn in high-dimensional feature spaces.Consider,for example,the primal problem in Eq.(15).In the dual,each training examplei has L i(L i−1)variables,two for each edge(α(i)jkandα(i)kj),since we have two constraints per edge in the primal.Letα(i)be the vector of dual variables for example i.The dual quadratic problem is:min i q⊤iα(i)+12i F⊤iα(i)2s.t.G iα(i)=0,α(i)≥0,∀i.The only occurrence of feature vectors is in the expan-sion of the squared-norm term in the objective:F⊤iα(i)= j<k(α(i)jk+α(i)kj)(2y(i)jk−1)f(x(i)jk)(15)Therefore,we can apply the kernel trick and letf(x(i)jk)⊤f(x(t)mn)=K(x(i)jk,x(t)mn).At prediction time, we can also use the kernel trick to compute:w⊤f(x mn)= i j<k(α(i)jk+α(i)kj)(2y(i)jk−1)K(x(i)jk,x mn). The dual of min-max Eq.(12)is also kernelizable.RS CC P C YWGG C PWGQN C YPEG C SGPKV1 2 35 6Figure1.PDB protein1ANS:amino acid sequence,3Dstructure,and graph of potential disulfide bonds.Actualdisulfide connectivity is shown in yellow in the3D modeland the graph of potential bonds.7.ExperimentsWe apply our framework to the task of disulfideconnectivity prediction.Proteins containing cysteineresidues form intra-chain covalent bonds known asdisulfide bridges.Such bonds are a very importantfeature of protein structure,as they enhance confor-mational stability by reducing the number of configu-rational states and decreasing the entropic cost of fold-ing a protein into its native state(Baldi et al.,2004).Knowledge of the exact disulfide bonding pattern in aprotein provides information about protein structureand possibly its function and evolution.Furthermore,as the disulfide connectivity pattern imposes structuralconstraints,it can be used to reduce the search spacein both protein folding prediction as well as protein3D structure prediction.Thus,the development of effi-cient,scalable and accurate methods for the predictionof disulfide bonds has important practical applications.Recently,there has been increasing interest in apply-ing computational techniques to the task of predict-ing disulfide connectivity(Fariselli&Casadio,2001;Baldi et al.,2004).Following the lines of Fariselli andCasadio(2001),we predict the connectivity pattern byfinding the maximum weighted matching in a graph inwhich each vertex represents a cysteine residue,andeach edge represents the“attraction strength”betweenthe cysteines it connects.For example,1ANS proteinin Fig.1has six cysteines,and three disulfide bonds.We parameterize the attraction scoring function via alinear combination of features,which include the pro-tein sequence around the two residues,evolutionaryinformation in the form of multiple alignment profiles,secondary structure or solvent accessibility informa-tion,etc.We then learn the weights of the differentfeatures using a set of solved protein structures,inwhich the disulfide connectivity patterns are known.Datasets.We used two datasets containing sequenceswith experimentally verified bonding patterns:SP39(used in Baldi et al.(2004);Vullo and Frasconi(2004);Fariselli and Casadio(2001))and DIPRO2.1We report results for two experimental settings:when the bonding state is known(that is,for each cys-teine,we know whether it bonds with some other cys-teine)and when it is unknown.The known state set-ting corresponds to prefect non-bipartite matchings,while the unknown to imperfect matchings.For thecase when bonding state is known,in order to com-pare to previous work,we focus on proteins containingbetween2and5bonds,which covers the entire SP39dataset and over90%of the DIPRO2dataset.In order to avoid biases during testing,we adopt thesame dataset splitting procedure as the one used inprevious work(Fariselli&Casadio,2001;Vullo&Fras-coni,2004;Baldi et al.,2004).2Models.The experimental results we report usethe dual formulation of Eq.(16)and an RBF kernelK(x jk,x st)=exp x jk−x st 22σ2 ,withσ∈[1,2].Weused commercial QP software(CPLEX)to train ourmodels.Training time took around70minutes for450examples.The set of features x jk for a candidate cysteine pairjk is based on local windows of size n centered aroundeach cysteine(we use n=9).The simplest approachis to encode for each window,the actual sequence asa20×n binary vector,in which the entries denotewhether or not a particular amino acid occurs at theparticular position.However,a common strategy isto compensate for the sparseness of these features byusing multiple sequence alignment profile information.Multiple alignments were computed by running PSI-BLAST using default settings to align the sequencewith all sequences in the NR database(Altschul et al.,1997).Thus,the input features for thefirst model,PROFILE,consist of the proportions of occurrence ofeach of the20amino-acids in the alignments at eachposition in the local windows.The second model,PROFILE-SS,augments thePROFILE model with secondary structure andsolvent-accessibility information.The DSSP program1The DIPRO2dataset was made publicly availableby Baldi et al.(2004).It consists of1018non-redundantproteins from PDB(Berman et al.,2000)as of May2004which contain intra-chain disulfide bonds.The sequencesare annotated with secondary structure and solvent acces-sibility information from DSSP(Kabsch&Sander,1983).2We split SP39into4different subsets,with the con-straint that proteins with sequence similarity of more than30%belong to different subsets.We ran all-against-allrigorous Smith-Waterman local pairwise alignment(usingBLOSUM65,with gap penalty/extension12/4)and consid-ered pairs with less than30aligned residues as dissimilar.K SVM PROFILE DAG-RNN 20.63/0.630.77/0.770.74/0.74 30.51/0.380.62/0.520.61/0.51 40.34/0.120.51/0.360.44/0.27 50.31/0.070.43/0.130.41/0.11PROFILE PROFILE-SS0.76/0.760.78/0.780.67/0.590.74/0.650.59/0.420.64/0.490.39/0.130.46/0.22PROFILE DAG-RNN0.57/0.59/0.440.49/0.59/0.400.48/0.52/0.280.45/0.50/0.320.39/0.40/0.140.37/0.36/0.150.31/0.33/0.070.31/0.28/0.03(a)(b)(c)Table1.Numbers indicate Precision/Accuracy for known bonded state setting in(a)and(b)and Preci-sion/Recall/Accuracy for unknown bonded state in(c).K denotes the true number of bonds.Best results in each row are in bold.(a)PROFILE vs.SVM and DAG-RNN model(Baldi et al.,2004)on SP39.(b)PROFILE vs. PROFILE-SS models on the DIPRO2dataset.(c)PROFILE vs.DAG-RNN model on SP39(unknown state).produces8types of secondary structure,so we aug-ment each local window of size n with an additional length8×n binary vector,as well as a length n binary vector representing the solvent accessibility at each po-sition.Because DSSP utilizes true3D structure in-formation in assigning secondary structure,the model cannot be used in for unknown proteins.Rather,its performance is useful as an upper bound of the poten-tial prediction improvement using features derived via accurate secondary structure prediction algorithms. Known Bonded State.When bonding state is known,we evaluate our algorithm using two metrics: accuracy measures the fraction of entire matchings predicted correctly,and precision measures fraction of correctly predicted individual bonds.We apply the model to the SP39dataset by us-ing4-fold cross-validation,which replicates the exper-imental setup of Baldi et al.(2004);Vullo and Fras-coni(2004).First,we evaluate the advantage that our learning formulation provides over a baseline ap-proach,where we use the features of the PROFILE model,but ignore the constraints in the learning phase and simply learn w using an SVM by labeling bonded pairs as positive examples and non-bonded pairs as negative examples.We then use these SVM-learned weights to score the edges.The results are summa-rized in Table1(a)in the column SVM.The PROFILE model uses our certificate-based formulation,directly incorporating the matching constraint in the learning phase.It achieves significant gains over SVM for all bond numbers,illustrating the importance of explic-itly modelling structure during parameter estimation. We also compare our model to the DAG-RNN model of Baldi et al.(2004),the current top-performing sys-tem,which uses recursive neural networks also with the same set of input features.Our performance is better for all bond numbers.As afinal experiment,we examine the role that sec-ondary structure and solvent-accessibility information plays in the model PROFILE-SS.Table1(b)shows that the gains are significant,especially for sequences with3and4bonds.This highlights the importance of developing even richer features,perhaps through more complex kernels.Unknown Bonded State.We also evaluated our learning formulation for the case when bonding state is unknown using the graph-copy reduction described in Sec.5.Here,we use an additional evaluation metric: recall,which measures correctly predicted bonds as a fraction of the total number of bonds.We apply the model to the SP39dataset for proteins of2-5bonds, without assuming knowledge of bonded state.Since some sequences contain over50cysteines,for compu-tational efficiency during training,we only take up to 14bonded cysteines by including the ones that par-ticipate in bonds,and randomly selecting additional cysteines from the protein(if available).During test-ing,we used all the cysteines.The results are summarized in Table1(c),with a comparison to the DAG-RNN model,which is cur-rently the only other model to tackle this more chal-lenging setting.Our results compare favorably having better precision and recall for all bond numbers,but our connectivity pattern accuracy is slightly lower for 3and4bonds.8.Discussion and ConclusionWe present a framework for learning a wide range of structured prediction models where the set of out-comes is a class of combinatorial structures such as matchings and graph-cuts.We present two formula-tions of structured max-margin estimation that define a concise convex optimization problem.Thefirst for-mulation,min-max,relies on the ability to express in-ference in a model as a concise convex optimization problem.The second one,certificate,only requires ex-pressing optimality of a desired solution according to a model.We illustrate how to apply these formulations to the problem of learning to match,with bipartite and non-bipartite matchings.These formulations can。