第3章 罚函数法及改进算法
3.1 引言
罚函数法是解决约束优化问题的重要方法,它的基本思想是用无约束问题代替约束问题,因而无约束问题的目标函数必须是原来的目标函数与约束函数的某种组合,类似线性规划中的M 法求初始可行解,在原来的目标函数上加上由约束函数组成的一个“惩罚项”来迫使迭代点逼近可行域,所以称为罚函数法。这样把约束问题转化成求解一系列的无约束极小点,通过有关的无约束问题来研究约束极值问题,从而使问题变的简单。许多非线性约束优化方法都要用罚函数作为评价函数来评价一个点的好坏,这在选择新点确定步长等方面都起着重要的作用,不同的罚项对算法影响很大,根据罚项的不同可以分为以下几类:
外罚函数法
对于问题
min ()f x (3-1)
.s t ()0i c x = 1,2,,;i m =??? (3-2)
()0i c x ≥ 1,2,,;i m m n =++??? (3-3)
其中:n f R R →为线性连续函数。
定义外罚函数为:
(,)L x σ()()f x P x σ=+()()f x Q x σ=+ (3-4)
()Q x =11()min{0,()}m n
i i i i m c x c x βα
==++
∑∑ (3-5) 通常取==2αβ,这样定义的外罚函数法,当x 为可行点是,()0Q x =;当x 不是可行点时,()0Q x >。而且x 离可行域越远()Q x 的值越大,它优点是允许从可行域的外部逐步逼近最优点,但其明显的缺点是它需要求解一系列无
约束极小化问题,计算工作量很大,且由于其收敛速度仅是线性的,往往需要较长的时间才能找到问题的近似解,再考虑到实际中所使用的终止准则,若实现不当,则算法很难找到约束问题的一个较好可行解,从而不适用于那些要求严格可行性的问题。
内罚函数法
它是针对不等式约束(3-1)(3-3)提出的,基本思想是在约束区域的边界筑起一道“墙”来,当迭代点靠近边界时,函数值陡然增大,于是最优点被挡在可行域内部,这样产生的点列k x 每个点都是可行点。通常定义内罚函数为:
1
(,)()()B x f x B x σσ=+ (3-6)
11()()
m i i B x c x ==∑ (3-7) 要减弱()B x 的影响,故令σ逐渐增大。内罚函数法的好处是每次迭代的点都是可行点,当迭代到一定阶段时,可以被接受为一个较好的近似最优解。但是内点罚函数法要求初始点位于可行域的内部,除特殊情况外,确定这样一个初始点并非易事。此外,由于内点罚函数不是处处有定义或不一定存在全局极小,故无约束最优化问题中的线性搜索方法不再适用,另外,当接近可行域边界时,内点罚函数法必须修正通常的线性搜索方法。
由于内点罚函数法不能处理等式约束,且寻求初始可行点的计算工作量往往太大。因此,在实际中,为了求解一般的非线性约束优化问题,人们往往将内点罚函数法与外点罚函数法结合起来适用。
混合罚函数法
混合罚函数法是针对问题(3-1)-(3-3)提出来的,当初始点0x 给定后,对等式约束和不被0x 满足的那些不等式约束用外罚函数法,而被0x 满足的那些不等式约束用内罚函数法。
通常定义混合罚函数为:
1
11(,)()(
)()()i I i P x f x P x c x σσσ∈=++∑ (3-8)
222
1()()min{0,()}m i i i i I P x c x c x =∈=+∑∑ (3-9)
1{()0,1,2,
,}i I i c x i m m n =>=++ 2{()0,1,2,
,}i I i c x i m m n =≤=++
精确罚函数法 对于外点罚函数法和内点罚函数法来说,其工作量很大,收敛慢的主要原因是它们需要求解一系列的无约束优化问题,而导致相应罚函数的无约束极小化运算越来越难于精确执行,效率差则是因为需要罚因子趋于无穷大或零所带来的罚函数呈病态问题。由此自然想到,能否设计出一种罚函数,使得只要令其中的罚参数取适当的有限值后,该罚函数的无约束极小点就恰好是原约束问题的最优解,从而克服外、内点罚函数法的缺点呢?通常称这样的罚函数为精确罚函数。
对问题(3-1)-(3-3),定义()()()1()((),())T m C x c x c x ---=如下
()()()i i c x c x -=,1,2,,i m =???
()()min{0,()}i i c x c x -=,1,2,,i m m n =++???
对于1L 罚函数
()11
()()()P x f x C x σ-=+ 其中0σ>是罚因子。如果
σλ*
∞≥
则在二阶充分条件
0T d W d *>,0d ?≠,0T A d *=
的假定下可证x *是1L 罚函数的局部严格极小点。所以1L 罚函数也常称为1
L 精确罚函数。同理,L ∞罚函数()1()()()P x f x C x σ-∞
=+也是精确罚函数。 乘子罚函数法
内外罚函数法的缺点是需要罚因子趋于无穷大才能使求解罚函数的极小和求解原向题等价。乘子罚函数法具有不要求初始点为严格内点,甚至不
要求其为可行点的特点,它利用近似Lagrange 乘子,求其近似解,并且逼近最优解,而不需要无穷大的罚因子,因此对它的研究有重要的理论和实用价值。
最早的乘子罚函数(又称为增广Lagrange 函数)是由Henstenes(1969)针对等式约束问题(3-1)(3-2)导出的,其形式为:
2
(,,)()()()2T P x f x c x c x σ
λσλ=-+ (3-10) 增广Lagrange 函数的另一种等价形式是在1969年由Powell 提出的,它提出对()i c x 进行平移,即用()i i c x θ-代替()i c x ,i θ是参数,这种平移的好处是不破坏()i c x ?的方向,由此Powell(1969)得到罚函数:
21(,,)()()(())2m T i i
i P x f x c x c x σλσλθ==-+-∑ (3-11)
如果定义i i λσθ=,则知式(3-10)与(3-11)只相差与x 无关的项212m i i σθ=∑,
由于式(3-10)与(3-11)等价,故罚函数(3-10)也称为Henstenes-Powell 罚函数。
我们看到通常都是用二次罚函数作为罚项,因此称之为二次罚函数乘子法。然而,它的缺点是容易引起罚因子过大,造成罚函数的Hesse 矩阵严重病态。
许多非线性约束优化方法都要用某个罚函数作为评价函数来评价一个点的好坏,这在选择新点确定步长等方面都起着重要的作用,因此对不同罚项的研究具有重要的理论和实际价值。近年来,许多研究者试图通过改变罚项构造出新的罚函数,有效地避免罚因子过大引起的罚函数的Hesse 矩阵严重病态的情况。
3.2 优化中的罚函数法
对一般约束最优化问题
min ()f x (3-12)
.s t ()0i c x = 1,2,,;i m =???
(3-13) ()0i c x ≥ 1,2,,;i m m n
=++??? (3-14) 定义1 称
(,)k L x σ()()k f x P x σ=+()()k f x Q x σ=+ (3-15)
为问题(3-12)-(3-14)的优化罚函数,0σ>为罚因子,其中罚项
11()[(())]{(min[0,()])}m n
i i i i m Q x q c x q c x ==+=+
∑∑ (3-16) ()q t 其中t R ∈且满足如下性质:
(1) ()q t 在R 中连续可微且为对称凸函数;
(2) 对?t R ∈,()0q t ≥;当且仅当0t =时,()0q t =;
(3) lim ()t q t →+∞=+∞,lim ()t q t →-∞
=-∞。 若定义
~
()()min[0,()]
i i i c x c x c x ?=?? 1,2,,1,2,,i m i m m n ==++ 则x 是可行点当且仅当()0i c x =。 我们通过(,)k L x σ的极小点(其中k σ为一定值),得到相应无约束极小点,序列{}k x 来逼近约束问题(3-12)-(3-14)的极小点*x 。
罚函数算法:
步1 选定初始点为0x ;选取初始惩罚因子10σ>(可取11σ=),惩罚因
子的放大系数1c >(可取10c =);置1k =。
步2 以1k x -为初始点,求解无约束问题min (,)n k x R
L x σ∈, 其中(,)()()()()k k k L x f x P x f x Q x σσσ=+=+,设其极小点为k x 。
步3 若()k Q x σε<,则k x 就是所要求的最优解,停止;否则转下一步。 步4 置1k k c σσ+=;1k k =+,转步2。
由罚项的特点,当k 趋向于无穷时,随着k σ的不断增大,对每个不可行点的惩罚()k Q x σ也不断增大并趋向于无穷。因此,在对应于k σ的无约束极小化问题的最优解k x 处,()k Q x σ的值应不断减小,从而保证k x 逐步趋于可
行并最终达到问题(3-12)-(3-14)的最优解。由()Q x ,(,)k L x σ的定义及极小点的含义,我们很容易证明下列结论。
引理1 给定0k σ>,k x 是(3-15)的解,则k x 也是约束问题
min ()n x R
f x ∈ (3-17) .s t |()|i i c x μ≤ 1,2,,
i n = (3-18) 的解,其中~|()|i i k c x μ=。
证明 由()q x 的性质知在(0,)+∞是增函数,且 ~~(|()|)(|()|)i i k q c x q c x ≥,又因为()q x 为对称函数,所以~~(|()|)(())i i k k q c x q c x =,~~
(|()|)(())i i q c x q c x =,由此可得
~~(())(())i i k q c x q c x ≥ 对任何x 满足式(3-18),由k x 的定义,我们有
~1()(())n i k i f x q c x σ=+∑~
1()(())n i k k k i f x q c x σ=≥+∑ (3-19)
所以
~~
1()()[(())(())]()n i i k k k k k i f x f x q c x q c x f x x σ=≥+-≥∑ (3-20)
故知k x 是问题(3-17)-(3-18)的解。
证毕。
由以上引理可知,若取ε充分小,则当算法迭代结束时,k x 是问题(3-12)- (3-14)的近似解。
引理2 对于由算法所产生的序列{}k x 总有,
11(,)(,)k k k k L x L x σσ++≥ (3-21)
1()()k k Q x Q x +≤ (3-22)
1()()k k f x f x +≥ (3-23)
其中1k ≥。
证明 由(,)()()L x f x Q x σσ=+和1k k σσ+>可知,
11111(,)()()k k k k k L x f x Q x σσ+++++=+111()()(,)k k k k k f x Q x L x σσ+++≥+=
又因为k x 是(,)k L x σ的极小点,所以对于任意x 总有(,)(,)k k k L x L x σσ≥,特别有
1(,)(,)k k k k L x L x σσ+≥。
由此可证得(3-21)。
因为k x 和1k x +分别使(,)k L x σ和1(,)k L x σ+取极小,所以有
11()()()()k k k k k k f x Q x f x Q x σσ+++≥+
1111()()()()k k k k k k f x Q x f x Q x σσ+++++≥+
由上式可得
11()()[()()]k k k k k f x f x Q x Q x σ++-≥-
111[()()]()()k k k k k Q x Q x f x f x σ+++-≥-
由此可得
11()[()()]0k k k k Q x Q x σσ++--≥
由于10k k σσ+>>,所以(3-22)成立。
最后,由式(3-21)和(3-22)得式(3-23)成立。
证毕。
定理1 设非线性约束问题(3-12)-(3-14)的最优解存在,设{}k x 由算法产生,且罚参数序列{}k σ单调递增且趋于+∞,则{}k x 的任何极限点都是问题(3-12)-(3-14)的可行域上的最优解。
证明 设{}*
k x x →,又设*x 是问题(3-12)-(3-14)的最优解,由于k x 是无约束问题
min ()k L x σ n x R ∈ 的解,由于*x 可行,即*()0Q x =,故有
****()()()()()k k k k L x L x f x Q x f x σσσ≤=+=
即
*()()()()k k k k k L x f x Q x f x σσ=+≤
由此可得*()()
0()k k k
f x f x Q x σ-≤≤,由于{}*k x x →,k σ→∞。故得 **()()f x f x ≤,且*()0Q x =。 即*x 可行,且**()()f x f x ≤,但*x 是问题(3-12)-(3-14)的解,因此*
x 也是问题(3-12)-(3-14)的解。
证毕。
我们现在对于优化中的罚函数法进行一般类型的概况,并证明其收敛性,但是需要说明的是其中不同种类的罚函数法在其收敛速度各有其不同。 3.3 改进的罚函数法及收敛性
3.3.1 改进的罚函数算法
罚函数法是解决约束优化问题的重要方法,它的基本思想是把约束优化问题转化成求解一系列的无约束极小化问题。通过有关的无约束问题来研究约束极值问题,经常采用的方法之一是在原来的目标函数上加上由约束函数组成的一个“惩罚项”来迫使迭代点逼近可行域,这种方法称为罚函数法。如何选取罚函数,以加速迭代算法的收敛速度,一直是约束优化问题研究的热点问题。
罚函数作为评价函数来评价一个点的好坏,这在选择新点确定步长等方面都起着重要作用,不同罚项的选取,构成不同的罚函数,必然会对算法产生不同的影响,因此对不同罚项的研究具有重要的理论和实用价值。
对一般约束最优化问题
min ()f x (3-24)
.s t ()0i c x = 1,2,,;i m =???
(3-25) ()0i c x ≥ 1,2,,;i m m n =++??? (3-26)
通常使用的外函数形式为:(,)()()L x f x Q x σσ=+ 其中罚项为:11()()min{0,()}m n i i i i m Q x c x c x βα
==+=+
∑∑,1,1αβ≥≥。σ为参数,若取2αβ==,我们称上述罚函数(,)L x σ为二次罚函数。
问题(3-24)-(3-26)的可行域R 为
R={x|()0,1,2,,;i c x i m ==???()0,1,2,,;}i c x i m m n ≥=++???
显然,当x 为可行点时,()0Q x =;当x 不是可行点时,()0Q x >,而且x 离可行域越远()Q x 的值越大。它的优点是允许从可行域的外部逐步逼近逼近最优点,但按上述定义的罚函数的缺点是:需要罚因子趋于无穷大,才可能使求解罚函数的极小和求解原问题等价。
为了有效的改善这种罚函数,我们试图构造一种能够加速迭代算法收敛的外罚函数法。本文提出一种用双曲正弦函数作罚项的罚函数,并由此构建了双曲正弦罚函数法,不仅证明了该罚函数和算法的合理性及迭代点列的收敛性,而且做了数值实验。结果表明本文中所提出的罚函数及对应的算法可以在罚因子与二次罚函数方法中的罚因子相同的情况下,有着更快的收敛速度。
定义1 称
(,)()()()()L x f x P x f x Q x σσσ=+=+ (3-27)
为问题(3-24)-(3-26)的双曲正弦罚函数,0σ>为罚因子,其中罚项
2
211()[sinh (())]{sinh (min[0,()])}m n i i i i m Q x c x c x ==+=+∑∑ (3-28) 其中sinh()2
t t
e e t --=,t R ∈;22sinh ()()2t t
e e t --=,t R ∈。 若定义
~
()()min[0,()]i i i c x c x c x ?=??
1,2,,1,2,,i m i m m n ==++ 则x 是可行点当且仅当()0i c x =。 我们通过一系列双曲正弦函数(,)k L x σ的极小点,其中k σ为一定值,得到相应无约束极小点,序列{}k x 来逼近约束问题(3-24)-(3-26)的极小点*x 。
双曲正弦罚函数算法:
步1 选定初始点为0x ;选取初始惩罚因子10σ>(可取11σ=),惩罚因
子的放大系数1c >(可取10c =);置1k =。
步2 以1k x -为初始点,求解无约束问题
min (,)n k x R
L x σ∈ 其中
(,)()()()()k k k L x f x P x f x Q x σσσ=+=+
设其极小点为k x 。
步3 若()k Q x σε<,则k x 就是所要求的最优解,停止;否则转下一步。 步4 置1k k c σσ+=;1k k =+,转步2。
3.3.2 收敛性证明及数值试验
引理1 设函数Q 和P σ由定义1定义,{}k x 由算法产生,且罚参数序列{}k σ单调递增,则
(1) 1()()k k Q x Q x -≤
(2) 1()()k k f x f x -≤
(3) 11()()k k k k L x L x σσ++≤
证明
(1) 由k x 的定义知
111
1()()()()k k k k k k k k L x L x L x L x σσσσ+---≤???≤?? 上面的两式相加,得
11()(()())0k k k k Q x Q x σσ----≤
因此1()()k k Q x Q x -≤,即(1)成立。
(2) 由111()()k k k k L x L x σσ---≤得
111()()(()())()k k k k k k f x f x Q x Q x f x σ---≤+-≤
即(2)成立。
(3) 由L σ以及k x 的定义得
111()()()()k k k k k k k L x L x f x Q x σσσ+++≤=+11111()()()k k k k k f x Q x L x σσ+++++≤+= 即(3)成立。
证毕。
引理2 设函数Q 和P σ由定义1定义,{}k x 由算法产生,且罚参数序列
{}k σ单调递增,记()k k Q x δ=,则k x 也是约束问题
min ()f x (3-29)
.s t ()k Q x δ≤
的解。
证明 设x 是问题(3-29)的可行点,我们有
0[()()]k k Q x Q x σ≤-[()()]k k k L x L x σσ=-[()()]k f x f x +-()()k f x f x ≤- 因此k x 是问题(3-29)的解。
证毕。
定理1 设非线性约束问题(3-24)-(3-26)的最优解存在,设{}k x 由算法产生,且罚参数序列{}k σ单调递增且趋于+∞,则{}k x 的任何极限点都是问题(3-24)-(3-26)的可行域上的最优解。
证明 设{}*
k x x →,又设*x 是问题(3-24)-(3-26)的最优解,由于k x 是无约束问题min ()k L x σ,n x R ∈的解,由于*x 可行,即*()0Q x =,故有 ****()()()()()k k k k L x L x f x Q x f x σσσ≤=+=
即*()()()()k k k k k L x f x Q x f x σσ=+≤ 由此可得*()()0()k k k f x f x Q x σ-≤≤
,由于{}*k x x →,k σ→∞。故得**()()f x f x ≤,且*()0Q x =。即*x 可行,且**()()f x f x ≤,但*x 是问题
(3-24)-(3-26)的解,因此*x 也是问题(3-24)-(3-26)的解。
证毕。
我们通过数值实验来检验本算法的有效性
(1)p 221211min ()26
f x x x =+ .s t 1210x x +-=
(2)p 123min ()f x x x x =++
.s t 22123
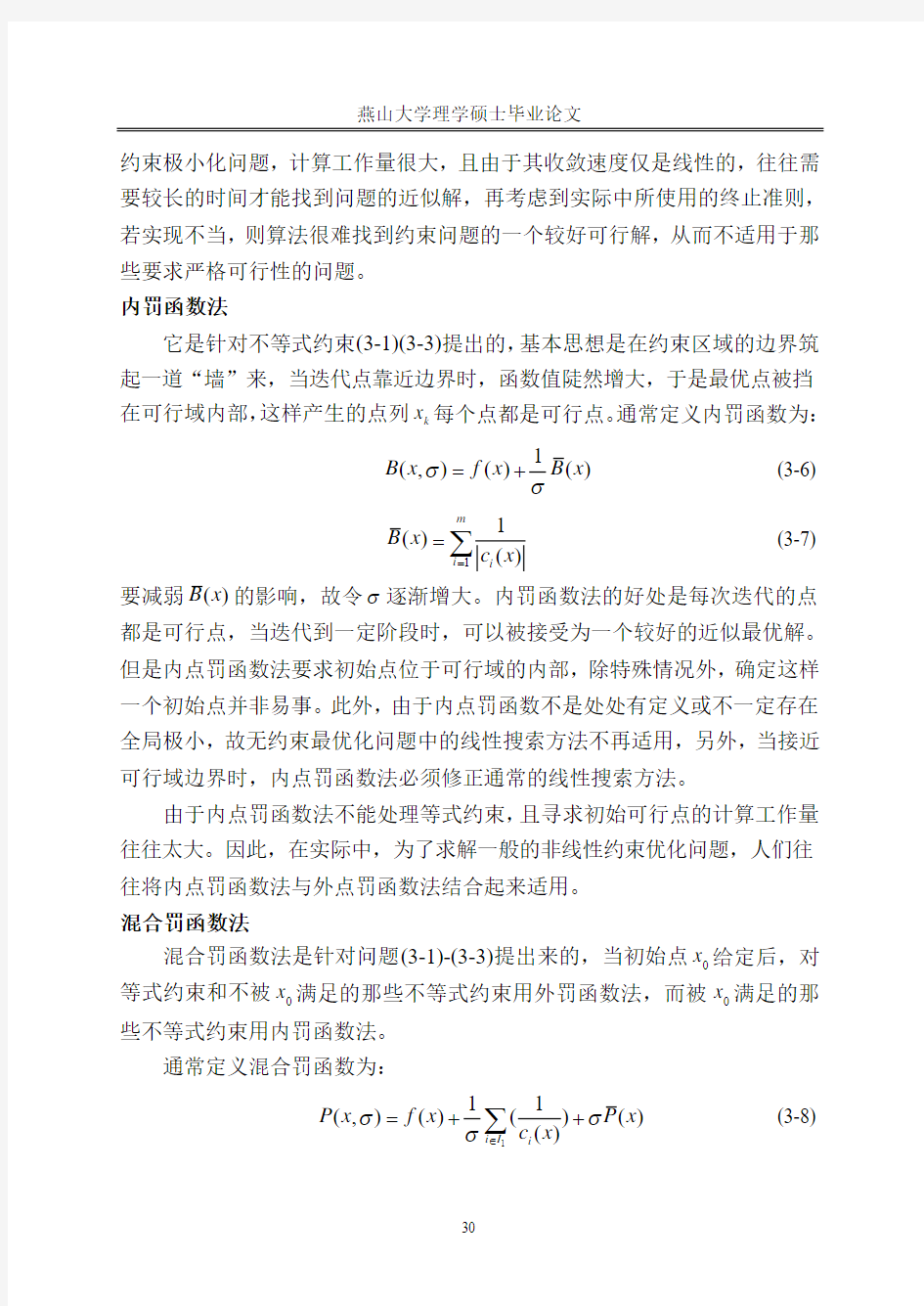
10x x x -+-= 在以下“次数”的是求解相应无约束问题的次数,“sin ”和“.2x ∧”分别表示双曲正弦罚函数法和二次罚函数法。σ是程序结束时所取罚因子,用matlab 编程实现。
表3-1 两种方法的数值比较:
Table 3-1 the numerical comparison of the two methods
由以上结果可以看出本文中构造的双曲正弦罚函数较二次罚函数法有明显的改进:其在相同较大罚因子的条件下,双曲法的次数明显减少。
3.4 本章小结
本文主要是介绍不等式优化问题的罚函数法,为了改进算法,将罚函数法中的罚项用双曲正弦函数代替,提出了一种罚函数的改进算法,并进行了收敛性证明,同时与二次罚函数法进行数值试验比较,说明了改进算法在收敛速度上有一定程度的改进。
https://www.doczj.com/doc/2215684512.html,/kuai_su/youhuasheji/suanfayuanli/4.3.asp 约束优化算法——外点惩罚函数法 (一)基本原理 设原目标函数为,在不等式约束条件下用外点惩罚函数法求极小。外点法常采用如下形式的泛函: (6) 由此,外点法所构造的相应的惩罚函数形式为 (7) 式中,惩罚因子是一个递增的正值数列,即 惩罚项中: (8) 由此可见,当迭代点X位于可行域内满足约束条件时,惩罚项为零,这时不管 取多大,新目标函数就是原目标函数,亦即满足约束条件时不受“惩罚”,此时求式(7)的无约束极小,等价于求原目标函数在己满足全部约束条件下的极小;而 当点X位于可行域外不满足约束条件时,惩罚项为正值,惩罚函数的值较原目标函数的值增大了,这就构成对不满足约束条件时的一种“惩
罚”。 由式(7)可知,每一次对罚函数求无约束的极值,其结果将随该次所给定的罚因子值而异。在可行域外,离约束边界越近的地方,约束函数的值越大,的值也就越小,惩罚项的作用也就越弱,随着罚因子逐次调整增大,有增大惩罚项的趋势,但一般说来泛函值下降得更 快一些。此时尽管值增大,但泛函值亦趋于零,满足式(3)。最后当,泛函值和惩罚项值均趋近于零。外点法在寻优过程中,随着罚因子的逐次调整增大,即取 ,所得的最优点序列可以看作是以为参数的一条轨迹,当时,最优点点列 从可行域的外部一步一步地沿着这条轨迹接近可行域,所得的最优点列逼近原问题的约束最优点。这样,将原约束最优化问题转换成为序列无约束最优化问题。外点法就是因从可行域的外部逼近最优解而得名。 (二)迭代过程及算法框图 外点惩罚函数法的具体迭代步骤如下: (1)给定初始点,初始惩罚因子,迭代精度,递增系数c>1,维数n。置。 (2)以为初始点,用无约束最优化方法求解惩罚函数的极小点,即: (9)。 (3)检验是否满足迭代终止条件: 或(若) 或(若) 若不满足,则进行第(4)步;否则转第(5)步。
函数的表示方法 1、 能根据不同需要选择恰当的方法(如图像法、列表法、解析法)表示函数; 2、 了解简单的分段函数,并能简单应用; 一、函数的常用表示方法简介: 1、解析法 如果函数()()y f x x A =∈中,()f x 是用代数式(或解析式)来表达的,则这种表达函数的方法叫做解析法(公式法)。 例如,s =602t ,A =π2 r ,2S rl π=,2)y x = ≥等等都是用解析式表示函 数关系的。 特别提醒: 解析法的优点:(1)简明、全面地概括了变量间的关系;(2)可以通过解析式求出任意一个自变量的值所对应的函数值;(3)便于利用解析式研究函数的性质。中学阶段研究的函数主要是用解析法表示的函数。 解析法的缺点:(1)并不是所有的函数都能用解析法表示;(2)不能直观地观察到函数的变化规律。 2、列表法: 通过列出自变量与对应函数值的表格来表示函数关系的方法叫做列表法。 例如:初中学习过的平方表、平方根表、三角函数表。我们生活中也经常遇到列表法,如银行里的利息表,列车时刻表,公共汽车上的票价表等等都是用列表法来表示函数关系的. 特别提醒: 列表法的优点:不需要计算就可以直接看出与自变量的值相对应的函数值。这种表格
常常应用到实际生产和生活中。 列表法的缺点:对于自变量的有些取值,从表格中得不到相应的函数值。 3、图象法: 用函数图象表示两个变量之间的函数关系的方法,叫做图像法。 例如:气象台应用自动记录器描绘温度随时间变化的曲线,工厂的生产图象,股市走向图等都是用图象法表示函数关系的。 特别提醒: 图像法的优点:能直观形象地表示出自变量的变化,相应的函数值变化的趋势,这样使得我们可以通过图象来研究函数的某些性质。 图像法的缺点:不能够精确地求出某一自变量的相应函数值。 二、函数图像: 1、判断一个图像是不是函数图像的方法: 要检验一个图形是否是函数的图像,其方法为:任作一条与x轴垂直的直线,当该直线保持与x轴垂直并左右任意移动时,若与要检验的图像相交,并且交点始终唯一的,那么这个图像就是函数图像。 2、函数图像的作图方法大致分为两种: (1)描点作图法。步骤分三步:列表,描点,连线成图。 (2)图像变换法。利用我们熟知基本初等函数图像,将其进行平移、对成等变换,从而得到我们所求的函数图像的方法。 三、根据函数图像确定函数的定义域和值域: 1、由函数图像来确定函数的值域的方法是看函数图像在y轴上的正投影所覆盖的区域; 2、由函数图像来确定函数的定义域的方法是看函数图像在x轴上的正投影所覆盖的区域; 四、分段函数图像: 有些函数在它的定义域中,对于自变量x的不同取值范围,对应法则不同,这样的函数通常称为分段函数。由此可知,作分段函数的图像时,应根据不同定义域上的不同解析式分别作出。
D C B A 1.2.2 函数的表示方法 第一课时 函数的几种表示方法 【教学目标】 1.掌握函数的三种主要表示方法 2.能选择恰当的方法表示具体问题中的函数关系 3.会画简单函数的图像 【教学重难点】 教学重难点:图像法、列表法、解析法表示函数 【教学过程】 一、复习引入: 1.函数的定义是什么?函数的图象的定义是什么? 2.在中学数学中,画函数图象的基本方法是什么? 3.用描点法画函数图象,怎样避免描点前盲目列表计算?怎样做到描最少的点却能显示出图象的主要特征? 二、讲解新课:函数的表示方法 表示函数的方法,常用的有解析法、列表法和图象法三种. ⑴解析法:就是把两个变量的函数关系,用一个等式表示,这个等式叫做函数的解析表达式,简称解析式. 例如,s=602 t ,A=π2 r ,S=2rl π,y=a 2 x +bx+c(a ≠0),y= 2-x (x ≥2)等等都是用解析 式表示函数关系的. 优点:一是简明、全面地概括了变量间的关系;二是可以通过解析式求出任意一个自变量的值所对应的函数值.中学阶段研究的函数主要是用解析法表示的函数. ⑵列表法:就是列出表格来表示两个变量的函数关系. 学号 1 2 3 4 5 6 7 8 9 身高 125 135 140 156 138 172 167 158 169 用列表法来表示函数关系的.公共汽车上的票价表 优点:不需要计算就可以直接看出与自变量的值相对应的函数值. ⑶图象法:就是用函数图象表示两个变量之间的关系. 例如,气象台应用自动记录器描绘温度随时间变化的曲线,课本 中我国人口出生率变化的曲线,工厂的生产图象,股市走向图等都是用图象法表示函数关系的. 优点:能直观形象地表示出自变量的变化,相应的函数值变化的趋势,这样使得我们可以通过图象来研究函数的某些性质. 三、例题讲解 例1某种笔记本每个5元,买 x ∈{1,2,3,4}个笔记本的钱数记为y (元),试写出以x 为自变量的函数y 的解析式,并画出这个函数的图像 解:这个函数的定义域集合是{1,2,3,4},函数的解析式为 y=5x ,x ∈{1,2,3,4}.
1.外点法 的约束最优化问题。(由约束条件作图) 解:取()()()00120,0,0.01,10,0.01,0;X C r k εε====== 外点法惩罚函数为:(会转化,并且把握函数值的趋势) (看到了min 就要知道在平面中取什么范围内的点,才可使罚函数达到最小) 対上式求偏导得: () () 1211221226 28 264152845x x x r x x r x x x φφ--???????? ?? ==????-+--+-???????? ?? 无约束目标函数极小化问题的最优解系列为: ()()** 12156584242 r r x r x r r r ++== ++ 22 121122123142 min ()(3)(4) .. ()50 () 2.50 ()0 ()0 f X x x s t g X x x g X x x g X x g X x =-+-=--≥=--≥=≥=≥()()()()()()()()()()()()()()()222222 1212121222 112212342222 11 22121212min ,34max 0,5max 0, 2.5max 0,max 0,69816(0,0,0,0)698165 2.5(0,0,x r x x r x x r x x r x r x x x x x g x g x g x g x x x x x r x x r x x g x g x g φ=-+-++-+-+++-+-????????????????-++-+-≤-≤-≤-≤=-++-+++-+-++->->-()()340,0)x g x ???? ??≤-≤????
课题:§1.2.2函数的表示法 教学目的:(1)明确函数的三种表示方法; (2)在实际情境中,会根据不同的需要选择恰当的方法表示函数; (3)通过具体实例,了解简单的分段函数,并能简单应用; (4)纠正认为“y=f(x)”就是函数的解析式的片面错误认识. 教学重点:函数的三种表示方法,分段函数的概念. 教学难点:根据不同的需要选择恰当的方法表示函数,什么才算“恰当”?分段函数的表示及其图象. 教学过程: 一、引入课题 1.复习:函数的概念; 2.常用的函数表示法及各自的优点: (1)解析法; (2)图象法; (3)列表法. 二、新课教学 (一)典型例题 例1.某种笔记本的单价是5元,买x (x∈{1,2,3,4,5})个笔记本需要y元.试用三种表示法表示函数y=f(x) . 分析:注意本例的设问,此处“y=f(x)”有三种含义,它可以是解析表达式,可以是图象,也可以是对应值表. 解:(略) 注意: ○1函数图象既可以是连续的曲线,也可以是直线、折线、离散的点等等,注意判断一个图形是否是函数图象的依据; ○2解析法:必须注明函数的定义域; ○3图象法:是否连线; ○4列表法:选取的自变量要有代表性,应能反映定义域的特征. 巩固练习: ——————————————第 1 页(共4页)——————————————
课本P27练习第1题 例2.下表是某校高一(1)班三位同学在高一学年度几次数学测试的成绩及班级及班级平均分表: 第一次第二次第三次第四次第五次第六次王伟98 87 91 92 88 95 张城90 76 88 75 86 80 赵磊68 65 73 72 75 82 班平均分88.2 78.3 85.4 80.3 75.7 82.6 请你对这三们同学在高一学年度的数学学习情况做一个分析. 分析:本例应引导学生分析题目要求,做学情分析,具体要分析什么?怎么分析?借助什么工具? 解:(略) 注意: ○1本例为了研究学生的学习情况,将离散的点用虚线连接,这样更便于研究成绩的变化特点; ○2本例能否用解析法?为什么? 巩固练习: 课本P27练习第2题 例3.画出函数y = | x | . 解:(略) 巩固练习:课本P27练习第3题 拓展练习: 任意画一个函数y=f(x)的图象,然后作出y=|f(x)| 和y=f (|x|) 的图象,并尝试简要说明三者(图象)之间的关系. 课本P27练习第3题 例4.某市郊空调公共汽车的票价按下列规则制定: (1)乘坐汽车5公里以内,票价2元; (2)5公里以上,每增加5公里,票价增加1元(不足5公里按5公里计算).已知两个相邻的公共汽车站间相距约为1公里,如果沿途(包括起点站和终点站)设20个汽车站,请根据题意,写出票价与里程之间的函数解析式,并画出函数的图象. ——————————————第 2 页(共4页)——————————————
#include [设计]罚函数法MATLAB程序 一、进退法、0.618法、Powell法、罚函数法的Matlab程序设计罚函数法(通用) function y=ff(x,k) y=-17.86*0.42*x(1)/(0.8+0.42*x(1))*(1-exp(- 2*(0.8+0.42*x(1))/3))*exp(-1.6)*x(2)-22. 99*x(1)/(0.8+x(1))*(1-exp(-2*(0.8+x(1))/3))*x(3)+k*(x(2)- (1.22*10^2*(9517.8*exp(-1 .6-2*0.42*x(1)/3)*x(2)+19035.6*exp(- 2*x(1)/3)*x(3)))/(1.22*10^2+9517.8*exp(-1.6-2 *0.42*x(1)/3)*x(2)+19035.6*exp(-2*x(1)/3)*x(3)))^2+k*(x(3)-exp(-0.8-2*x(1)/3)*x(3) -exp(-2.4-2*0.42*x(1)/3)*x(2))^2; % 主函数,参数包括未知数的个数n,惩罚因子q,惩罚因子增长系数k,初值x0,以及允许的误差r function G=FHS(x0,q,k,n,r,h,a) l=1; while (l) x=powell(x0,n,q,r(1),h,a); %调用powell函数 g(1)=ff1(x),g(2)=ff2(x) . . . g(p)=ffp(x); %调用不等式约束函数,将其值 %存入数组g h(1)=hh1(x),h(2)=hh2(x) . . . h(t)=hht(x); %调用等式约束函数,将其值%存入数组h for i=1:p 一、内点法 1. 基本原理 内点法的特点是将构造的新的无约束目标函数——惩罚函数定义在可行域内,并在可行域内求惩罚函数的极值点,即求解无约束问题时的探索点总是在可行域内部,这样,在求解内点惩罚函数的序列无约束优化问题的过程中,所求得的系列无约束优化问题的解总是可行解,从而在可行域内部逐步逼近原约束优化问题的最优解。。 内点法是求解不等式约束最优化问题的一种十分有效方法,但不能处理等式约束。因为构造的内点惩罚函数是定义在可行域内的函数,而等式约束优化问题不存在可行域空间,因此,内点法不能用来求解等式约束优化问题。 对于目标函数为 min ()f X s.t. ()0u g X ≤ (u=1,2,3,…m ) 的最优化问题,利用内点法进行求解时,构造惩罚函数的一般表达式为 ()() 11 (,)()()m k k u u X r f X r g X ?==-∑ 或者 () () () []1 1 (,)()ln () ()ln ()m m k k k u u u u X r f X r g X f X r g X ?===+=--∑∑ 而对于()f X 受约束于()0(1,2, ,)u g X u m ≥=的最优化问题,其惩罚函数的一般形式为 () () 11 (,)()()m k k u u X r f X r g X ?==+∑ 或 ()() []1 (,)()ln ()m k k u u X r f X r g X ?==-∑ 式中,() k r -----惩罚因子,是递减的正数序列,即 ()()()()()01210k k r r r r r +>>>>>> > ()lim 0k k r →∞ = 通常取() 1.0,0.1,0.01,0.001, k r =。 上述惩罚函数表达式的右边第二项,称为惩罚项,有时还称为障碍项。 说明: 当迭代点在可行域内部时,有()0u g X ≤(u =1,2,3,4,…m ),而() 0k r >,则惩罚 项恒为正值,当设计点由可行域内部向约束边界移动时,惩罚项的值要急剧增大并趋向无穷大,于是惩罚函数的值也急剧增大直至无穷大,起到惩罚的作用,使其在迭代过程中始终不 §1.2.2 函数的表示法(二) 编制:陈伟锋 审核:高一备课组 2009年8月 高一年级 班级 姓名 学习目标 1. 了解映射的概念及表示方法; 2. 能解决简单函数应用问题. 学习重、难点 重难点: 映射的概念. 知识链接 1.函数的定义是 . 2.函数的三要素指 . 3.函数的表示方法有 、 、 . 学习过程 一、知识点解析 一般地,设 A 、B 是两个非空的集合,如果按某一个确定的对应法则 f ,使对 于集合 A 中的_______________元素 x ,在集合 B 中都有_________________ 的元素 y 与之对应,那么就称对应 f : A →B 为从集合 A 到集合 B 的一个映 射(mapping ).记作“ f : A →B ” 注: ① 映射的对应情况有__________、_________ ,一对多是映射吗?_________. ② 关键:A 中任意,B 中唯一;对应法则 f. ③ 函数是建立在两个非空数集间的一种对应,若将其中的条件“非空数集”弱 化为“任意两个非空集合”, 按照某种法则可以建立起更为普通的元素之间的对 应关系,即映射. 二、典型例题 例1 用图示意两个集合 A 、B 的元素之间的一些对应关系,并判断是否为映射? ① A = {1,4,9} , B ={-3,-2,-1 ,1,2,3} ,对应法则:开平方; ② A ={-3,-2,-1 ,1,2,3} , B = {1,4,9} ,对应法则:平方; ③ A ={30°,45°,60°} , B ={1, 22, 2 3 ,21}, 对应法则:求正弦. 例2 探究从集合 A 到集合 B 一些对应法则,哪些是映射?如果是从 B 到 A 呢? (1)A={P | P 是数轴上的点},B=R ; (2)A={三角形},B={圆}; (3)A={ P | P 是平面直角体系中的点},B ={(x, y) | x ∈R, y ∈R} ; (4)A={ x ∣ x 是新华中学的班级},B= { x ∣x 是新华中学的学生}. 惩罚函数法简介 罚函数法 它将有约束最优化问题转化为求解无约束最优化问题: 其中M为足够大的正数,起"惩罚"作用,称之为罚因子,F(x,M)称为罚函数。 定理 对于某个确定的正数M,若罚函数F(x,M)的最优解x*满足有约束最优化问题的约束条件,则x*是该问题的最优解。 序列无约束最小化方法 罚函数法在理论上是可行的,在实际计算中的缺点是罚因子M的取值难于把握,太小起不到惩罚作用;太大则由于误差的影响会导致错误。 改进 这些缺点,可根据上述定理加以改进,先取较小的正数M,求出F(x,M)的最优解x*。 当x*不满足有约束最优化问题的约束条件时,放大M(例如乘以10)重复进行,直到x*满足有约束最优化问题的约束条件时为止。 种类 传统的罚函数法一般分为外部罚函数法和内部罚函数法。外部罚函数法是从非可行解出发逐渐移动到可行区域的方法。内部罚函数法也称为障碍罚函数法,这种方法是在可行域内部进行搜索,约束边界起到类似围墙的作用,如果当前解远离约束边界时,则罚函数值是非常小的,否则罚函数值接近无穷大的方法。 由于进化计算中通常采用外部罚函数法,因此本文主要介绍外部罚函数法。在进化计算中,研究者选择外部罚函数法的原因主要是该方法不需要提供初始可行解。需要提供初始可行解则是内部罚函数法的主要缺点。由于进化算法应用到实际问题中可能存在搜索可行解就是NP难问题,因此这个缺点是非常致命的。 外部罚函数的一般形式为 B(x)=f(x)+[∑riGi+∑cjHj] 其中B(x)是优化过程中新的目标函数,Gi和Hj分别是约束条件gi(x)和hj(x)的函数,ri和cj是常数,称为罚因子。 Gi和Hj最常见的形式是 Gi=max[0,gi(x)]a Hj=|hj(x)|b 其中a和b一般是1或者2。 理想的情况下,罚因子应该尽量小,但是如果罚因子低于最小值时可能会产生非可行解是最优解的情况(称为最小罚因子规则)。这是由于如果罚因子过大或者过小都会对进化算法求解问题产生困难。 如果罚因子很大并且最优解在可行域边界,进化算法将很快被推进到可行域以内,这将不能返回到非可行域的边界。在搜索过程开始的时候,一个较大的罚因子将会阻碍非可行域的搜索。如果在搜索空间中可行域是几个非连通的区域,则进化算法可能会仅移动在其中一个区域搜索,这样将很难搜索到其他区域,除非这些区域非常接近。另一方面,如果罚因子太小,这样相对于目标函数罚函数项是可以忽略的,则大量的搜索时间将花费在非可行域。由于很多问题的最优解都在可行域的边界,大量时间在非可行域进行搜索对找到最优解是没有多大作用的,这对于进化算法来说非常致命的。 最小罚因子规则概念是很简单的,但是实现起来却是非常的困难。对于一个 教学准备 1. 教学目标 1.知识与技能 (1)明确函数的三种表示方法; (2)会根据不同实际情境选择合适的方法表示函数; (3)通过具体实例,了解简单的分段函数及应用. 2.过程与方法: 学习函数的表示形式,其目的不仅是研究函数的性质和应用的需要,而且是为加深理解函数概念的形成过程. 3.情感态度与价值观 让学生感受到学习函数表示的必要性,渗透数形结合思想方法. 2. 教学重点/难点 教学重点:函数的三种表示方法,分段函数的概念. 教学难点:根据不同的需要选择恰当的方法表示函数,什么才算“恰当”?分段函数的表示及其图象. 3. 教学用具 投影仪 4. 标签 函数的表示法 教学过程 (一)创设情景,揭示课题. 我们在前两节课中,已经学习了函数的定义,会求函数的值域,那么函数有哪些表示的方法呢?这一节课我们研究这一问题. (二)研探新知 1.函数有哪些表示方法呢? (表示函数的方法常用的有:解析法、列表法、图象法三种) 2.明确三种方法各自的特点? (解析式的特点为:函数关系清楚,容易从自变量的值求出其对应的函数值, 便于用解析式来研究函数的性质,还有利于我们求函数的值域;列表法的特点为:不通过计算就知道自变量取某些值时函数的对应值;图像法的特点是:能 直观形象地表示出函数的变化情况) (三)质疑答辩,排难解惑,发展思维. 例1.某种笔记本的单价是5元,买个笔记本需要元,试用 三种表示法表示函数. 分析:注意本例的设问,此处“”有三种含义,它可以是解析表达式,可以是图象,也可以是对应值表. 注意: ①函数图象既可以是连续的曲线,也可以是直线、折线、离散的点等等; ②解析法:必须注明函数的定义域; ③图象法:是否连线; ④列表法:选取的自变量要有代表性,应能反映定义域的特征. 例2.下表是某校高一(1)班三位同学在高一学年度几次数学测试的成绩及班 级平均分表: 请你对这三位同学在高一学年度的数学学习情况做一个分析. 分析:本例应引导学生分析题目要求,做学情分析,具体要分析什么?怎么分析?借助什么工具? 重庆科技学院学生实验报告 附录function [x,minf] = minGeneralPF(f,x0,h,c1,p,var,eps) format long; if nargin == 6 eps = 1.0e-4; end k = 0; FE = 0; for i=1:length(h) FE = FE + (h(i))^2; end x1 = transpose(x0); x2 = inf; while 1 M = c1*p; FF = M*FE; SumF = f + FF; [x2,minf] = minNT(SumF,transpose(x1),var); if norm(x2 - x1)<=eps x = x2; break; else c1 = M; x1 = x2; end end minf = subs(f,var,x); format short; %牛顿法求解无约束最优化问题 function [x,minf] = minNT(f,x0,var,eps) format long; if nargin == 3 eps = 1.0e-6; end tol = 1; x0 = transpose(x0); gradf = jacobian(f,var); jacf = jacobian(gradf,var); while tol>eps v = subs(gradf,var,x0); tol = norm(v); pv = subs(jacf,var,x0); p = -inv(pv)*transpose(v); p = double(p); x1 = x0 + p; x0 = x1; end x = x1; minf = subs(f,var,x); format short; >> syms x y; >> minGeneralPF(x^2+y^2,[1,1],y^2-1,1000,10,[x,y],0.0001) ans = 1.0000 2.1.2 函数的表示方法(1) 教学目标: 1.进一步理解函数的概念,了解函数表示的多样性,能熟练掌握函数的三种不同的表示方法; 2.在理解掌握函数的三种表示方法基础上,了解函数不同表示法的优缺点,针对具体问题能合理地选择表示方法; 3.通过教学,培养学生重要的数学思想方法——分类思想方法. 教学重点: 函数的表示. 教学难点: 针对具体问题合理选择表示方法. 教学过程: 一、问题情境 1. 情境. 下表的对应关系能否表示一个函数: 2.问题. 如何表示一个函数呢? 二、学生活动 1.阅读课本掌握函数的三种常用表示方法; 2.比较三种表示法之间的优缺点. 3.完成练习 三、数学建构 1.函数的表示方法: 2.三种不同方法的优缺点: 3.三种不同方法的相互转化:能用解析式表示的,一般都能列出符合条件的表、画出符合条 列表法—用列表来表示两个变量之间函数关系的方法 解析法—用等式来表示两个变量之间函数关系的方法 图象法—用图象来表示两个变量之间函数关系的方法 件的图,反之亦然;列表法也能通过图形来表示. 四、数学运用 (一)例题 例1 购买某种饮料x 听,所需钱数为y 元.若每听2元,试分别用解析法、列表法、图象法将y 表示成x (x ∈{1,2,3,4})的函数,并指出该函数的值域. 跟踪练习:某公司将进货单价为8元一个的商品按10元一个销售,每天可卖出100个,若这种商品的销售价每个上涨1元,则销售量就减少10个. (1)列表: (2)图象: (3)解析式: 将条件变换成:“某公司将进货单价为8元一个 的商品按10元一个销售,每天可卖出110个” 例2 如图,是一个二次函数的图象的一部分,试根据图象 中的有关数据,求出函数f (x )的解析式及其定义域. (二)练习: 1.1 nmile(海里)约为1854m ,根据这一关系,写出米数y 关于海里数x 的函数解析式. 2.用长为30cm 的铁丝围成矩形,试将矩形的面积 S (cm 2)表示为矩形一边长x (cm)的函数,并画出函数的图象. 3.已知f (x )是一次函数,且图象经过(1,0)和(-2,3)两点,求f (x )的解析式. 4.已知f (x )是一次函数,且f (f (x ))=9x -4,求f (x )的解析式. 五、回顾小结 1.函数表示的多样性; 2.函数不同表示方法之间的联系性; 3.待定系数法求函数的解析式. 六、作业 混合型惩罚函数法:混合法是综合外点法和内点法的优点而建立的一种惩罚函数法。 混合型惩罚函数法有两种形式:内点形式的混合型惩罚函数法和外点型惩罚函数法。 (一) 内点形式的混合型惩罚函数法 不等式约束部分按内点型惩罚函数法形式处理,其惩罚函数形式为 212121=1 1 [()]()p m k k k k v u v u r h X g X ?=+∑∑(X ,r ,r )=f(X)+r 式中,惩罚因子12,k k r r 应分别为递减和递增的正值数列,为了统一用一个内点惩罚因子,可将上式写成如下形式 ()2 11 11(,)()[()]()p m k k v u v u X r f x r h X g X ?===++ ∑ 式中()k r 和内点法一样,为一个递减的正值数列,即 (1)(2)()()......0min 0 k k r r r r >>>>= 内点形式的混合型惩罚函数法的迭代过程及算法框图均与内点惩罚函数法相同。初始点(0)X 必须是严格满足诸不等式约束条件的内点,初始惩罚因子()k r 、抵减系数e 均应参照内点惩罚函数法进行选取。 (二) 外点形式的混合型惩罚函数法 不等式约束部分按外点惩罚函数法形式处理,其惩罚函数形式为 ()221 1 (,)(){[min{0,()}][()]} m P k u v u V X r f X g X h X ?===++∑∑式中,惩罚因子()k r 和外点法一样,为一个递增的正值数列,即 (1)(2)0..... min k r r r →∞ <<<<<=+∞ (k ) 外点形式的混合型惩罚函数法的迭代过程及算法框图均与外点惩罚函数法相同。初始点(0)X 可在n R 空间任选,初始惩罚因子(1)r 、递增系数c 均与参照外点惩罚函数法进行选取。 [1]胡洪涛,NGW 行星回转减速器可靠性优化设计[D].合肥:合肥工业大学,1996. [2]王述彦、马鹏飞,2K-H 型行星齿轮系传动的优化设计[J].建筑机械化,2002.5. [3]陈秀宁,机械优化设计[M].浙江:浙江大学出版社,1989. [4]陈举华、朱国强,行星齿轮传动的可靠性优化设计[M].北京:化学 [5]梁小光,行星齿轮减速器优化设计的数学模型[J].山西机械,2003. [6]龚小平,行星齿轮传动的模糊可靠性优化设计[J].行星齿轮传动 罚函数法 本章介绍一类求解约束优化问题的方法----惩 罚函数法。这类方法是求解无约束优化问题的最 早的一类方法,也是一类比较有效的方法。 罚函数法的基本思想就是,借助罚函数把 约束问题转化为无约束问题,进而用无约束最优 根据我们利用的罚函数的类型,分为 外点罚函数法的算法思想 0, i=1, 2, …, m = 0, j=1, 2, …, l n上的连续函数。 由于上述问题存在约束,而且约束可能 是非线性的,因此在求解是必须同时照顾到 满足约束条件这两个 = 0, j=1, 2, …, l 方面。实现这一点的途径是有目标函数和约 束函数组成辅助函数,把原来的约束问题转 化为极小化辅助函数的无约束问题。 x ()(8.1) 的最优解必须使得h j (x )接近的第二项将是很大的正数,现行点必不是极小点。因此可见,求解问题(8.2)的近似解。 (8.2) 转化为无约束问题 0, i=1, 2, …, m 不等式约束问题的辅助函数与等式约束的辅助函数情形不同,但构造辅助函数的基本思在可行点辅助函数等于原来的目标函数值,在不可行点,辅助函数值等于原来的目标函数值加上一个很大的正数。}2 ()(8.3) i g x ??? }0,.()0 i g x ?={}max 0,.()() i i g x g x ?=?的最优解必须使得g i (x )大于 的第二项将是很大的正数,现行点必不是极小点。因此可见,求解问的近似解。 (8.4) 转化为无约束问题 0, i=1, 2, …, m = 0, j=1, 2, …, l 我们把上述思想加以推广,对于一般问(8.5) ()) (8.6) j h x 是满足以下条件的连续函数 2013-2014 (1) 专业课程实践论文 内点法 一、算法理论 内点法总是从可行域的内点出发,并保持在可行域内进行搜索,因此这种 方法适用于只有不等式约束条件的问题 内点法据图计算步骤: 1.给定初()D x int 0∈,允许误差0?ε,初始参数0r 1?缩小系数1k ),1,0(=∈β; 2.以)1-k (x 为初始点,求解问题 Min )()(f x B r x k + S.t. D int x ∈ 3.若ε?)()(k k x B r 则停,得近似解)(k x ;否则令1,r 1k +==+k k r k β回2. clc m=zeros(1,50); a=zeros(1,50); b=zeros(1,50); f0=zeros(1,50); syms x1 x2 e; m(1)=1;c=0.2;a(1)=2;b(1)=-3; f=x1^2+x2^2-e*(1/(2*x1+x2-2)+1/(1-x1)); f0(1)=15; fx1=diff(f,'x1'); fx2=diff(f,'x2'); fx1x1=diff(fx1,'x1'); fx1x2=diff(fx1,'x2'); fx2x1=diff(fx2,'x1'); fx2x2=diff(fx2,'x2'); for k=1:100 x1=a(k);x2=b(k);e=m(k); for n=1:100 f1=subs(fx1); f2=subs(fx2); f11=subs(fx1x1); f12=subs(fx1x2); f21=subs(fx2x1); f22=subs(fx2x2); if(double(sqrt(f1^2+f2^2))<=0.002) a(k+1)=double(x1);b(k+1)=double(x2);f0(k+1)=double(subs(f)); break; else X=[x1 x2]'-inv([f11 f12;f21 f22])*[f1 f2]'; x1=X(1,1);x2=X(2,1); end end if(double(sqrt((a(k+1)-a(k))^2+(b(k+1)-b(k))^2))<=0.001)&&(double( abs((f0(k+1)-f0(k))/f0(k)))<=0.001) a(k+1) b(k+1) k #include "stdio.h" #include "stdlib.h" #include "math.h" const int kkg=3; double r0; double f(double x[]) {double ff; ff=pow((x[0]-8),2)+pow((x[1]-8),2); return(ff); } /*约束条件子程序*/ void strain(double x[],double g[]) {g[0]=x[0]-1; g[1]=x[1]-1; g[2]=11-x[0]-x[1]; } /*惩罚函数子程序*/ double objf(double p[]) {int i; double ff,sg,*g; g=(double *)malloc(kkg*sizeof(double)); sg=0; strain(p,g); for(i=0;i for(i=0;i 外点罚函数优化实例 一、优化问题 如图1所示,为某一桁架的一部分,杆2距O 点30cm 处有一支点C 。为了固定桁架,现欲在杆1和2上设置支点A 和B ,用来连接杆3(可拆卸)。已知当桁架固定时,杆1和2成直角;而且,杆1右边有一段长为20cm 的重要部位,不能设置支点。卸去杆3、收起桁架时,支点A 的位置不能高于BC 段中点D 。求取支点A 、B 的位置,使得杆3的长度尽量小,以节省材料。 图1 桁架结构示意图 二、数学模型 设A 、B 两点距离O 点的长度分别为1x 和2x ,而桁架固定时杆1和2成直角。 所以杆3的长度为22213x x l +=。 由图1可知,201≥x 且)30(2 121+≤x x ,即0201≤+-x 且030221≤--x x 。 设T x x X ],[21=,取222123)(x x l X f +==。因此,数学模型为: 极小化目标函数 2221)(min x x X f += 约束条件 020)(11≤+-=x X g 0302)(212≤--=x x X g 三、求解数学模型 (1)外点罚函数法求解 构造外点法罚函数,如下: })]0,302[m ax ()]0,20{[(m ax (),(22121)(2221)(--+-++=x x x M x x M X k k φ 程序流程图如图2所示: 图2 外点罚函数法程序流程图 程序步骤: ①选择适当的初始罚因子)0(M 、初始点)0(X 、收敛精度ε和罚因子系数c 。在本程序中分别取1)0(=M ,]20,20[)0(=X ,610-=ε,c=8。令迭代步数k=0。 ②采用牛顿法求无约束问题),(m in )(k M X φ的极值点)()(*k M X 。 201-2014 (1) 专业课程实践论文 内点法 内点法总是从可行域的内点出发,并保持在可行域内进行搜索,因此这种方法适用于只有不等式约束条件的问题 内点法据图计算步骤: 1.给定初()D x int 0∈,允许误差0?ε,初始参数0r 1?缩小系数1k ),1,0(=∈β; 2.以)1-k (x 为初始点,求解问题 Min )()(f x B r x k + S.t. D int x ∈ 3.若ε?)()(k k x B r 则停,得近似解)(k x ;否则令1,r 1k +==+k k r k β回2. 求满足)0()0(x ,.....,2,1,0)(g 的m i x i =< ;;ρρ??00k 从)(k x 出发,求 ))(()(f ),(min ),(1)1(x g x x G x G i m i i k ∑=++==φρρρ 0~)}({max )1(+k i i x g )1()()1(0)()(x ++?-+k k k k x x x a )(f ~)(f )()1(k k x x + 1~ερ 1(k)1)(k ||~ x -x ||ε+k =+?1k ;ραρ 改变约束极值方法 输出结果 停 clc m=zeros(1,50); a=zeros(1,50); b=zeros(1,50); f0=zeros(1,50); syms x1 x2 e; m(1)=1;c=0.2;a(1)=2;b(1)=-3; f=x1^2+x2^2-e*(1/(2*x1+x2-2)+1/(1-x1)); f0(1)=15; fx1=diff(f,'x1'); fx2=diff(f,'x2'); fx1x1=diff(fx1,'x1'); fx1x2=diff(fx1,'x2'); fx2x1=diff(fx2,'x1'); fx2x2=diff(fx2,'x2'); for k=1:100 x1=a(k);x2=b(k);e=m(k); for n=1:100 f1=subs(fx1); f2=subs(fx2); f11=subs(fx1x1); f12=subs(fx1x2); f21=subs(fx2x1); f22=subs(fx2x2); if(double(sqrt(f1^2+f2^2))<=0.002) a(k+1)=double(x1);b(k+1)=double(x2);f0(k+1)=double(subs(f)); break; else X=[x1 x2]'-inv([f11 f12;f21 f22])*[f1 f2]'; x1=X(1,1);x2=X(2,1); end end if(double(sqrt((a(k+1)-a(k))^2+(b(k+1)-b(k))^2))<=0.001)&&(double(a bs((f0(k+1)-f0(k))/f0(k)))<=0.001) a(k+1) b(k+1) k f0(k+1) break;[设计]罚函数法MATLAB程序
内点法的基本原理以及举例计算
§1[1].2.2函数的表示方法(二)
惩罚函数法简介
1.7 函数的表示法 教学设计 教案
等式约束极值问题-外点罚函数法
高中数学函数的表示方法(1)
混合惩罚函数法
罚函数法
惩罚函数的内点法
内点惩罚函数法子程序
外点罚函数优化实例
惩罚函数的内点法
相关主题
文本预览