Simulink 比值控制课后答案
作业题目:
在例一中如系统传递函数为43
()151s G s e s -=
+,其他参数不变,试对其进行单闭环比
值控制系统仿真分析,并讨论43
()151
s G s e s -=+分母中“15”变化10%±时控制系统的鲁棒
性。
(1)分析从动量无调节器的开环系统稳定性。
由控制理论知,开环稳定性分析是系统校正的前提。系统稳定性的分析可利用Bode 图进行,编制MATLAB Bode 图绘制程序(M-dile )如下:
clear all
close all T=15;K0=3;tao=4; num=[K0];den=[T,1];
G=tf(num,den,'inputdelay',tao);
margin(G)
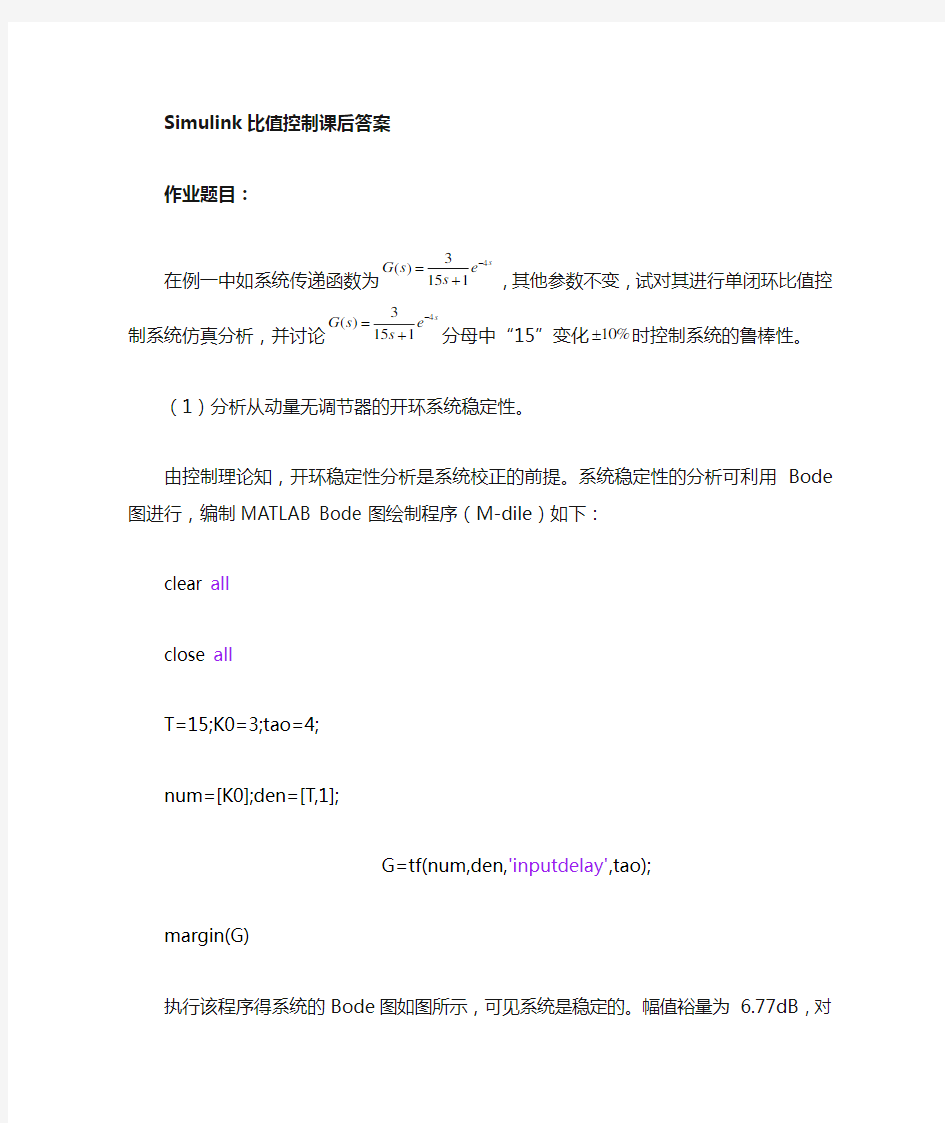
执行该程序得系统的Bode 图如图所示,可见系统是稳定的。幅值裕量为6.77dB ,对应增益为2.2。
-40-30-20-100
10M a g n i t u d e (d B )10
10101010
-2160
-1800-1440-1080-720
-3600P h a s e (d e g )
Bode Diagram
Gm = 6.77 dB (at 0.431 rad/sec) , P m = 66.3 deg (at 0.189 rad/sec)
Frequency (rad/sec)
(2)选择从动量控制器形式及整定其参数。
根据工程整定的论述,选择PI 形式的控制器,即() I
p K G s K s
=+
。本处采用稳定边界法整定系统。先让I K =0,调整p K 使系统等幅振荡(由稳定性分析图知在p K =2.2附近时系统震荡),即使系统处于临界稳定状态。
系统Simulink框图如下所示
调节P=0.3,I=0.02时,基本达到了振荡临界要求,其系统响应图如下所示:
(3)系统过程仿真。
单闭环比值控制过程相当于从动量变化的随动控制过程。假定主动量由一常值10加幅度为0.3的随机扰动构成,从动量受均值为0、方差为1的随机干扰。主动量和从动量的比值根据工艺要求及测量仪表假定为3.
系统的控制过程Simulink仿真框图如图所示。其中控制常量及随机扰动采用封装形式。
主动控制量的封装结构如下:
运行结果如下所示(图中曲线从上往下分别为从动量跟踪结果、主动量给定值和随机干扰):
可见除初始时间延时外,从动量较好地跟随主动量变化而变化,并且基本维持比值3,有效地克服了主动量和从动量的扰动。
(4)单闭环比值控制系统鲁棒性分析
,即积分时间为13.5~16.5,分析系统鲁棒性。
要求分母中“15”变化10%
系统仿真框图如图a所示,图b为延时选择模块Subsystem的展开图,改变积分时间常数为13.5,14,14.5……16.5共11个值。经过运行后在工作空间绘图(使用语句:plot(tout,simout);hold on;grid on)即可见到图c的仿真结果。
图a 系统仿真框图
图b 延时选择模块统封装结构
图c 仿真结果
分析图c仿真结果可见,随着延时环节的变化,从动量跟随主动量的规律有较小变化,
变化时仍能正常工作,系统但并未改变系统稳定性及精度,说明系统在积分时间发生10%
的鲁棒性较强。
《机电系统计算机控制》综合复习资料 一、单项选择题 1、计算机控制系统中研究线性系统的重要工具是( )。 (A) 传递函数 (B) 脉冲传递函数 (C) 脉冲响应函数 (D) 微分方程 2、计算机控制系统中研究线性离散系统的重要工具是( )。 (A) 传递函数 (B) 脉冲传递函数 (C) 脉冲响应函数 (D) 微分方程 3、两个连续环节1()G s 和2()G s 串联,若两者中间有采样器则其开环脉冲传递函数为( )。 (A) 12()()G z G z + (B) 12()G G z (C) 12()()G z G z - (D)12()()G z G z 4、由Z 变换的滞后性质可以得到( )。 (A) [()]()n Z f k n T Z F Z -= (B) [()]()Z f k n T nF Z -= (C) [()]()n Z f k n T Z F Z -+= (D) )(])([Z F Z T n k f Z n -=- 5、51系列单片机串行通信的方式选择、接收和发送控制以及串行口的状态标志均可由专用寄存器( )控制和指示。 (A) PCON (B) SCON (C) TCON (D) TMOD 6、单片机中要实现T1为定时功能,由软件启动,方式2工作。T0为计数方式,软件启动,方式1工作,则TMOD 的控制字为( )。 (A) 0010 1101 (B) 0010 0101 (C) 0010 0100 (D) 0010 0001 7、C200H 的存储器中用于存放系统的管理和监控程序来完成协调控制的存储器是( )。 (A) 用户程序存储器 (B) 数据存储器 (C) 系统程序存储器 (D) 静态存储器 8、C200H 对继电器区访问采用通道寻址方式,其中I/O 继电器区的通道范围是( )。 (A) 000~029 (B) 030~250 (C) 251~255 (D) TR00~TR07 9、51系列单片机定时器的启停、标志定时器的溢出和中断情况均可由专用寄存器( )控制和指示。 (A) PCON (B) SCON (C) TMOD (D) TCON 10、51系列单片机串行通信的工作方式中,波特率固定为/12osc f 的是( )。 (A)工作方式0 (B) 工作方式1 (C) 工作方式2 (D) 工作方式3 11、与梯形图 相对应的助记符是( )。
《离散数学》考试题库及答案 一、 填空 10% (每小题 2分) 1、 若P ,Q 为二命题,Q P ?真值为1,当且仅当 。 2、 对公式),()),(),((y x xR z x zQ y x yP ?∨?∧?中自由变元进行代入的 公 式 为 。 3、 )) (()(x xG x xF ??∧?的 前 束 范 式为 。 4、 设x 是谓词合式公式A 的一个客体变元,A 的论域为D ,A (x )关于y 的自由的, 则 被称为全称量词消去规则,记为US 。 5、 与非门的逻辑网络为 。 二、 选择 30% (每小题 3分) 1、 下列各符号串,不是合式公式的有( )。 A 、R Q P ?∧∧)(; B 、)()((S R Q P ∧→→; C 、R Q P ∧∨∨; D 、S R Q P ∨∧∨?))((。 2、 下列语句是命题的有( )。 A 、2是素数; B 、x+5 > 6; C 、地球外的星球上也有人; D 、这朵花多好看呀!。 3、 下列公式是重言式的有( )。 A 、)(Q P ??; B 、Q Q P →∧)(; C 、P P Q ∧→?)(; D 、P Q P ?→)( 4、 下列问题成立的有( )。 A 、 若C B C A ∨?∨,则B A ?; B 、若C B C A ∧?∧,则B A ?; C 、若B A ???,则B A ?; D 、若B A ?,则B A ???。 5、 命题逻辑演绎的CP 规则为( )。 A 、 在推演过程中可随便使用前提; B 、在推演过程中可随便使用前面演绎出的某些公式的逻辑结果; C 、如果要演绎出的公式为C B →形式,那么将B 作为前提,设法演绎出C ;
精心整理 ----------2007-------------------- 一、(22分)求解下列问题: 1. (3分)简述采样定理。 解:当采样频率s ω大于信号最高有效频率h ω的2倍时,能够从采样信号)(*t e 中 完满地恢复原信号)(t e 。(要点:h s ωω2>)。 2.(3分)简述什么是最少拍系统。 解:在典型输入作用下,能以有限拍结束瞬态响应过程,拍数最少,且在采样时刻上无稳态误差的随动系统。 3.(3 4.(x()∞5.(5解:(G 6.(5试用Z 解:二、( (i X s ) z 图1 1.(5分)试求系统的闭环脉冲传递函数 () () o i X z X z ; 2.(5分)试判断系统稳定的K 值范围。
解:1.101 1 1 1 11 1()(1)(1)11(1)1(1)()1e 11e 1e G G z z Z s s z Z s s z z z z z z z e z -------??=-??+????=--??+?? =-----=---= -1 1 010******* 1e ()()e 1e ()1()1e (1e )(e )(1e )(1e )e e o i K X z KG G z z X z KG G z K z K z K K z K K ------------== -++--=-+--=-+- 2.(5 三、(8 已知(z)1Φ=1.(3分)简述离散系统与连续系统的主要区别。 解:连续系统中,所有信号均为时间的连续函数;离散系统含有时间离散信号。 2.(3分)简述线性定常离散系统的脉冲传递函数的定义。 解:在系统输入端具有采样开关,初始条件为零时,系统输出信号的Z 变换与输入信号的Z 变换之比。 3.(3分)简述判断线性定常离散系统稳定性的充要条件。 解:稳定的充要条件是:所有特征值均分布在Z 平面的单位圆内。 4.(5分)设开环离散系统如图所示,试求开环脉冲传递函数)(z G 。
Simulink 快速入门 启动 Simulink 软件 要构建模型,可以使用Simulink? Editor 和Library Browser。 启动 MATLAB 软件 启动 Simulink 之前,请先启动 MATLAB?。请参阅启动和关闭(MATLAB)。 配置 MATLAB 以启动 Simulink 您在 MATLAB 会话中打开第一个模型时需要的时间比打开后续模型长,因为默认情况下,MATLAB 会在打开第一个模型时启动 Simulink。这种即时启动 Simulink 的方法可以缩短 MATLAB 启动时间,避免不必要的系统内存占用。 要快速打开第一个模型,您可以配置 MATLAB,在它启动时同时启动 Simulink。 要启动 Simulink 而不打开模型或 Library Browser,请使 用start_simulink。 根据 MATLAB 的启动方式,恰当使用此命令: ?在 MATLAB startup.m文件中 ?在操作系统命令行中,使用matlab命令和-r开关例如,要在运行 Microsoft?Windows?操作系统的计算机上启动 MATLAB 时启动 Simulink,请创建具有以下目标的桌面快捷方式: matlabroot\bin\win64\matlab.exe -r start_simulink 在 Macintosh 和Linux?计算机上,可在启动 MATLAB 时使用以下命令启动Simulink 软件: matlab -r start_simulink 打开 Simulink Editor 要打开 Simulink Editor,您可以: ?创建一个模型。在 MATLAB 的Home选项卡上,点击Simulink并选择一个模型模板。 或者,如果您已经打开了 Library Browser,请点击New Model按钮。 有关创建模型的其他方法,请参阅创建模型。 ?打开一个现有模型。要打开最近使用的模型,请在 MATLAB Home选项卡上点击Simulink。 或者,如果您知道要打开的模型的名称,可在 MATLAB 命令提示符下输入名称,例如vdp。有关打开模型的其他方法,请参阅打开模型。
第一章习题 1.1判断下列语句是否为命题,若是命题请指出是简单命题还是复合命题。(1)2是无理数。 (2)5能被2整除。 (3)现在开会吗? (4)x+5>0 (5)这朵花真是好看! (6)2是素数当且仅当三角形有三条边。 (7)雪是黑色的当且仅当太阳是从东方升起。 (8)2000年10月1日天气晴好。 (9)太阳系以外的星球上有生物。 (10)小李在宿舍里。 (11)全体起立。 (12)4是2的倍数或是3的倍数。 (13)4是偶数且是奇数。 (14)李明和王华是同学。 (15)蓝色和黄色可以调配成绿色。 1..2 将上题中的命题符号化,并讨论他们的真值。 1.3判断下列各命题的真值。 (1)若2+2=4,则3+3=6; (2)若2+2=4,则3+3≠6; (3)若2+2≠=4,则3+3=6; (4)若2+2≠=4,则3+3≠=6; (5)2+2=4,当且仅当3+3=6; (6)2+2=4,当且仅当3+3≠6; (7)2+2≠4,当且仅当3+3=6; (8)2+2≠4,当且仅当3+3≠6; 1.4将下列命题符号化,并讨论其真值。 (1)如果今天是1号,则明天是2号; (2)如果今天是1号,则明天是3号; 1.5将下列命题符号化。 (1)2是偶数不是素数; (2)小王不但聪明而且用功; (3)虽然天气冷。老王还是来了; (4)他一边吃饭,一边看电视; (5)如果天下大雨,他就乘公交汽车来; (6)只有天下大雨,他才乘公交汽车来; (7)除非天下大雨,否则他不乘公交汽车来; (8)不经一事,不长一智; 1.5设p,q的真值为0 ,r,s的真值为1,求下列命题公式的真值。(1)p∨(q∧r);
计算机控制系统部分习题参考答案
————————————————————————————————作者:————————————————————————————————日期:
第一章 1.1 计算机控制系统是怎么样分类的?按功能和控制规律可各分几类? 答:计算机控制系统可按功能分类,按控制规律分类和按控制方式分类。 按功能计算机控制系统的分类:(1)数据处理系统。(2)直接数字控制(简记为DDC)。(3)监督控制(简记为SCC)。(4)分级控制。(5)集散控制。(6)计算机控制网络。 按照控制规律计算机控制系统的分类:(1)程序和顺序控制。(2)比例积分微分控制(简称PID控制)。(3)有限拍控制。(4)复杂规律控制。(5)智能控制。 1.2 计算机控制系统由哪些部分组成?并画出方框图。 答:计算机控制系统由控制对象、执行器、测量环节、数字调节器及输入输出通道等组成。 方框图:P115 图1.21 输出反馈计算机控制系统 1.9 简述采样定理及其含义。 答:采样定理:如果采样角频率=2/T大于2,即≥2,则采样的离散信 号(t)能够不失真地恢复原来的连续信号y(t)。式中是连续信号y(t)的频谱特性中的最高角频率。 含义:要使采样信号(t)能够不失真地恢复原来的连续信号y(t),必须正确选择采 样角频率,使≥ 1.10 多路巡回检测时,采样时间,采样周期T和通道数N之间的关系。 答:采样时间是足够短的时间,y(kT)y(kT+),0<<。应满足 T≥N。 1.12 设有模拟信号(0~5)V和( 2.5~5)V,分别用8位、10位和12位A/D转换器,试计算 并列出各自的量化单位和量化误差。 答:量化单位q=,量化误差 根据以上公式可求得(05)V: 转换位数8 10 12 量化单位q/mV 19.53 4.88 1.22 9.76 2.44 0.61 量化误差 (2.5)V:
第一章 定律证明: (1) A?B=B?A (交换律) 证?x x∈A?B ? x∈A 或x∈B, 自然有x∈B 或x∈A ? x∈B?A 得证A?B?B?A. 同理可证B?A?A?B. (2) A?(B?C)=(A?B)?(A?C) (分配律) 证?x x∈A?(B?C) ? x∈A或(x∈B且x∈C ) ?(x∈A或x∈B)且(x∈A或x∈C) ?x∈(A?B)?(A?C) 得证A?(B?C)?(A?B)?(A?C). 类似可证(A?B)?(A?C)?A?(B?C). (3) A?E=E (零律) 证根据并的定义, 有E?A?E. 根据全集的定义, 又有A? E?E. (4) A?E=A (同一律) 证根据交的定义, 有A?E?A. 又, ?x x∈A, 根据全集E的定义, x∈E, 从而x∈A且x∈E, ?x∈A?E 得证A?A?E. 例4 证明A?(A?B)=A(吸收律) 证利用例3证明的4条等式证明 A?(A?B) = (A?E)?(A?B) (同一律) = A?(E?B) (分配律) = A?(B?E) (交换律) = A?E (零律) = A (同一律) 例5 证明(A-B)-C=(A-C)-(B-C) 证(A-C)-(B-C) = (A ?~C) ? ~(B ? ~C) (补交转换律) = (A ?~C) ? (~B ? ~~C) (德摩根律) = (A ?~C) ? (~B ? C) (双重否定律) = (A ?~C? ~B)?(A ?~C? C) (分配律) = (A ?~C? ~B)?(A ??) (矛盾律) = A ?~C? ~B (零律,同一律) = (A ?~B) ? ~C (交换律,结合律)
计算机控制系复习题(1-5章) 第一章绪论 主要内容:计算机控制系统的基本概念、组成、特点、类型。 一、画出计算机控制系统的基本结构框图,并简述其工作 过程。 基本结构框图: 二、和连续控制系统相比,计算机控制系统具有哪些特点? 三、计算机控制系统有哪几种类型?简述计算机监督系统(SCC)中,SCC计算机的作用是什么?
第二章过程通道 主要内容:过程通道的概念、一般结构及其实现。 一、在计算机控制系统中,过程通道有哪几种类型?每一种类型的作用是什么? 二、开关量输入通道中,转换电路的主要作用是什么?如下转换电路,分析说明开关量闭合时对应的数字量是什么? 三、利用两片74LS274和1片74LS138设计一个16路的开关量输入信号与8086的接口电路,要求16路开关量对应的端口地址为00H-0FH。
四、模拟量输入通道的一般结构如下: (1)简述通道中每个环节的主要功能。 (2)模拟量输入通道中是否必须加采样保持器?为什么? 五、某热工过程有64点温度信号,传感器测温变化范围:150℃~850℃,采用微机监测。 求解下列问题: 1)若经A/D转换后的数字量每个脉冲对应的实际温度小于等于0.68 C,则A/D分辨率至少为多少位才能保证 该精度? 2)写出被测点实际温度T与A/D转换后的数字量之间的关系式。 3)该测量方式中温度零点迁移量为多少? 六、简述采样定理的内容,采样周期取得过大或过小对计算机控制系统有什么影响?
第三章 计算机控制系统的理论基础 主要内容:离散系统的描述、离散系统的稳定性分析、离散系统的稳态误差 一、线性离散系统的脉冲传递函数的定义是什么? 二、已知系统的差分方程为 )2()1()(-=-+k r k y k y 输入信号是 ? ??<≥=0001)(k k k r 初始条件为1)0(=y ,试写出输出脉冲序列()y k ,写出Y(z)表达式的前5项。 三、已知某离散系统如下图所示: 计算:?)()()(==z r z y z φ ?) () ()(==z r z e z e φ 计算:?)() ()(==z r z y z φ ?)()()(==z r z e z e φ
Simulink仿真 摘要:simulink作为matlab的衍生模组,具有强大的仿真能力。原则上你可以将任意具有明确映射关系的物理量进行仿真模拟。对于相互间关系不明确的物理量,则可以通过输入输出数据的采集,然后通过模糊控制的方案替代明确的映射关系。本文主要针对的是以电焊机电路为主,其他仿真为辅的教程性质的文章。关键词:matlab Simulink 仿真电焊机教程 第一章初识软件 (2) 1.1 simulink 简介 (2) 1.2 simulink基础页面 (2) 1.3 常用库的介绍 (3) 1.3.1 simulink库 (4) 1.3.1.1 常用模块库 (4) 1.3.1.2 其他常用子库模块 (6) 1.3.2 电气库Simscape (7) 1.3.2.1 Electrical库 (7) 1.3.2.2 Specialized Technology库 (8) 1.4模块连接 (9) 第二章简单仿真系统的建立 (11) 2.1传递函数S信号仿真 (11) 2.1.1 运放环节的等效替代 (11) 2.1.2 等效变换 (12) 2.1.3 逻辑仿真 (13) 2.2电气库仿真 (13) 2.3子系统和模块的建立 (15) 2.3.1 子系统的建立 (15) 2.3.2 模块的建立 (16) 第三章复合仿真 (18) 3.1 m函数模块 (18) 3.1.1 简单编程 (18) 3.1.2 部分函数介绍 (19) 3.2 整体模型 (21) 3.3 仿真注意事项 (22) 3.3.1 注意事项1 (22) 3.3.2 注意事项2 (23) 3.3.3 注意事项3 (24) 3.3.4 注意事项4 (24) 结语 (25)
离散数学试题一(A 卷答案) 一、(10分)证明(A ∨B )(P ∨Q ),P ,(B A )∨P A 。 二、(10分)甲、乙、丙、丁4个人有且仅有2个人参加围棋优胜比赛。关于谁参加竞赛,下列4 种判断都是正确的: (1)甲和乙只有一人参加; (2)丙参加,丁必参加; (3)乙或丁至多参加一人; (4)丁不参加,甲也不会参加。 请推出哪两个人参加了围棋比赛。 三、(10分)指出下列推理中,在哪些步骤上有错误为什么给出正确的推理形式。 (1)x (P (x ) Q (x )) P (2)P (y )Q (y ) T (1),US (3)xP (x ) P (4)P (y ) T (3),ES (5)Q (y ) T (2)(4),I (6)xQ (x ) T (5),EG 四、(10分)设A ={a ,b ,c},试给出A 上的一个二元关系R ,使其同时不满足自反性、反自反性、 五、(15分)设函数g :A →B ,f :B →C , (1)若f o g 是满射,则f 是满射。 (2)若f o g 是单射,则g 是单射。 六、(15分)设R 是集合A 上的一个具有传递和自反性质的关系,T 是A 上的关系,使得T R 且R ,证明T 是一个等价关系。 七、(15分)若
实验报告 课程名称:MATLAB语言与控制系统仿真 实验项目:PID控制系统的Simulink仿真分析专业班级: 学号: 姓名: 指导教师: 日期: 机械工程实验教学中心
注:1、请实验学生及指导教师实验前做实验仪器设备使用登记; 2、请各位学生大致按照以下提纲撰写实验报告,可续页; 3、请指导教师按五分制(优、良、中、及格、不及格)给出报告成绩; 4、课程结束后,请将该实验报告上交机械工程实验教学中心存档。 一、实验目的和任务 1.掌握PID 控制规律及控制器实现。 2.掌握用Simulink 建立PID 控制器及构建系统模型与仿真方法。 二、实验原理和方法 在模拟控制系统中,控制器中最常用的控制规律是PID 控制。PID 控制器是一 种线性控制器,它根据给定值与实际输出值构成控制偏差。PID 控制规律写成传递 函数的形式为 s K s Ki K s T s T K s U s E s G d p d i p ++=++==)1 1()() ()( 式中,P K 为比例系数;i K 为积分系数;d K 为微分系数;i p i K K T =为积分时间常数; p d d K K T =为微分时间常数;简单来说,PID 控制各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产 生控制作用,以减少偏差。 (2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积 分时间常数i T ,i T 越大,积分作用越弱,反之则越强。 (3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大 之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调 节时间。 三、实验使用仪器设备(名称、型号、技术参数等) 计算机、MATLAB 软件 四、实验内容(步骤) 1、在MATLAB 命令窗口中输入“simulink ”进入仿真界面。 2、构建PID 控制器:(1)新建Simulink 模型窗口(选择“File/New/Model ”),在 Simulink Library Browser 中将需要的模块拖动到新建的窗口中,根据PID 控制器的 传递函数构建出如下模型:
S i m u l i n k仿真环境基础学习Simulink是面向框图的仿真软件。 7.1演示一个Simulink的简单程序 【例7.1】创建一个正弦信号的仿真模型。 步骤如下: (1)在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(SimulinkLibraryBrowser)窗口,如图7.1所示。
图7.1Simulink界面 (2)单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。 (3)在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。 (4)用鼠标单击所需要的输入信号源模块“SineWave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“SineWave”模块就被添加到untitled窗口;也可以用鼠标选中“SineWave”模块,单击鼠标右键,在快捷菜单中选择“addto'untitled'”命令,就可以将“SineWave”模块添加到untitled窗口,如图7.2所示。
(5) Scope ”模块(示波器)拖放到“untitled ”窗口中。 (6)在“untitled ”窗口中,用鼠标指向“SineWave ”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope ”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。如图7.3所示。 (7)开始仿真,单击“untitled ”模型窗口中“开始仿真”图标 ,或者选择菜单“Simulink ”——“Start ”,则仿真开始。双击“Scope ” 模块出现示波器显示屏,可以看到黄色的正弦波形。如图7.4所示。 图7.2Simulink 界面
试卷二试题与参考答案 一、填空 1、 P :你努力,Q :你失败。 2、 “除非你努力,否则你将失败”符号化为 ; “虽然你努力了,但还是失败了”符号化为 。 2、论域D={1,2},指定谓词P 则公式x ??真值为 。 3设A={2,3,4,5,6}上的二元关系}|,{是质数x y x y x R ∨<><=,则 R= (列举法)。 R 的关系矩阵M R = 。 4、设A={1,2,3},则A 上既不是对称的又不是反对称的关系 R= ;A 上既是对称的又是反对称的关系R= 。 5、设代数系统,其中A={a ,b ,c}, 则幺元是 ;是否有幂等 性 ;是否有对称性 。 6、4阶群必是 群或 群。 7、下面偏序格是分配格的是 。
8、n 个结点的无向完全图K n 的边数为 ,欧拉图的充要条件是 。 二、选择 1、在下述公式中是重言式为( ) A .)()(Q P Q P ∨→∧; B .))()(()(P Q Q P Q P →∧→??; C .Q Q P ∧→?)(; D .)(Q P P ∨→。 2、命题公式 )()(P Q Q P ∨?→→? 中极小项的个数为( ),成真赋值的个数为( )。 A .0; B .1; C .2; D .3 。 3、设}}2,1{},1{,{Φ=S ,则 S 2 有( )个元素。 A .3; B .6; C .7; D .8 。 4、设} 3 ,2 ,1 {=S ,定义S S ?上的等价关系 },,,, | ,,,{c b d a S S d c S S b a d c b a R +=+?>∈∈<><><<=则由 R 产 生 的S S ?上一个划分共有( )个分块。 A .4; B .5; C .6; D .9 。 5、设} 3 ,2 ,1 {=S ,S 上关系R 的关系图为 则R 具有( )性质。 A .自反性、对称性、传递性; B .反自反性、反对称性; C .反自反性、反对称性、传递性; D .自反性 。
----------2007-------------------- 一、(22分)求解下列问题: 1. (3分)简述采样定理。 解:当采样频率s ω大于信号最高有效频率h ω的2倍时,能够从采样信号)(* t e 中 完满地恢复原信号)(t e 。(要点:h s ωω2>)。 2.(3分)简述什么是最少拍系统。 解:在典型输入作用下,能以有限拍结束瞬态响应过程,拍数最少,且在采样时刻上无稳态误差的随动系统。 3.(3分)简述线性定常离散系统稳定性的定义及充要条件。 解:若系统在初始扰动的影响下,其输出动态分量随时间推移逐渐衰减并趋于零,则称系统稳定。稳定的充要条件是:所有特征值均分布在Z 平面的单位圆内。 4.(3分)已知X(z)如下,试用终值定理计算x (∞)。 ) 5.0)(1()(2+--= z z z z z X 解: 经过验证(1)X()z z -满足终值定理使用的条件,因此, 211x()lim(1)X()lim 20.5 z z z z z z z →→∞=-==-+。 5.(5分)已知采样周期T =1秒,计算G (z ) = Z [G h (s )G 0(s ) ]。 ) 2)(1(1 e 1)()()(0++-==-s s s s G s G s G Ts h 解:11 1 1211 11(1)(1e )()(1)Z[](1)()s s 11e (1e )e z z z G z z z z z z z --------=--=--=+---++ 6.(5分) 已知系统差分方程、初始状态如下: )k (1)(8)1(6)2(=++-+k c k c k c ,c(0)=c(1)=0。 试用Z 变换法计算输出序列c (k ),k ≥ 0。 解: 22 ()6()8()() ()(1)(68)3(1)2(2)6(4)1 (){2324},0 6 k k z C z C z C z R z z z z z C z z z z z z z c k k -+===-+--+---=-?+≥ 二、(10分)已知计算机控制系统如图1所示,采用数字比例控制() D z K =, 其中K >0。设采样周期T =1s ,368.0e 1=-。 注意,这里的数字控制器D (z )就是上课时的()c G z 。
3 Creating a Simulink Model ?“Overview of a Simple Model”on page3-2 ?“Creating the Simple Model”on page3-3 ?“Connecting Blocks in the Simple Model”on page3-9 ?“Simulating the Simple Model”on page3-14
3Creating a Simulink?Model Overview of a Simple Model You can use Simulink software to model dynamic systems and simulate the behavior of the models.The basic techniques you use to create a simple model are the same techniques you will use for more complex models. To create this simple model,you need four blocks: ?Sine Wave—Generates an input signal for the model. ?Integrator—Processes the input signal. ?Mux—Multiplexes the input signal and processed signal into a single signal. ?Scope—Visualizes the signals in the model. After connecting the blocks,they model a system that integrates a sine wave signal and displays the result along with the original signal. You can build this simple model yourself,starting with“Creating a New Model”on page3-3. 3-2
银河航空航天大学 课程设计 (论文) 题目复杂过程控制系统设计与Simulink仿 真 班级 学号 学生姓名 指导教师
目录 0. 前言 (1) 1. 总体方案设计 (2) 2. 三种系统结构和原理 (3) 2.1 串级控制系统 (3) 2.2 前馈控制系统 (3) 2.3 解耦控制系统 (4) 3. 建立Simulink模型 (5) 3.1 串级 (5) 3.2 前馈 (5) 3.3 解耦 (7) 4. 课设小结及进一步思想 (15) 参考文献 (15) 附录设备清单 (16)
复杂过程控制系统设计与Simulink仿真 姬晓龙银河航空航天大学自动化分校 摘要:本文主要针对串级、前馈、解耦三种复杂过程控制系统进行设计,以此来深化对复杂过程控制系统的理解,体会复杂过程控制系统在工业生产中对提高产品产量、质量和生产效率的重要作用。建立Simulink模型,学习在工业过程中进行系统分析和参数整定的方法,为毕业设计对模型进行仿真分析及过程参数整定做准备。 关键字:串级;前馈;解耦;建模;Simulink。 0.前言 单回路控制系统解决了工业过程自动化中的大量的参数定制控制问题,在大多数情况下这种简单系统能满足生产工艺的要求。但随着现代工业生产过程的发展,对产品的产量、质量,对提高生产效率、降耗节能以及环境保护提出了更高的要求,这便使工业生产过程对操作条件要求更加严格、对工艺参数要求更加苛刻,从而对控制系统的精度和功能要求更高。为此,需要在单回路的基础上,采取其它措施,组成比单回路系统“复杂”一些的控制系统,如串级控制(双闭环控制)、前馈控制大滞后系统控制(补偿控制)、比值控制(特殊的多变量控制)、分程与选择控制(非线性切换控制)、多变量解耦控制(多输入多输出解耦控制)等等。从结构上看,这些控制系统由两个以上的回路构成,相比单回路系统要多一个以上的测量变送器或调节器,以便完成复杂的或特殊的控制任务。这类控制系统就称为“复杂过程控制系统”,以区别于单回路系统这样简单的过程控制系统。 计算机仿真是在计算机上建立仿真模型,模拟实际系统随时间变化的过程。通过对过程仿真的分析,得到被仿真系统的动态特性。过程控制系统计算机仿真,为流程工业控制系统的分析、设计、控制、优化和决策提供了依据。同时作为对先进控制策略的一种检验,仿真研究也是必不可少的步骤。控制系统的计算机仿真是一门涉及到控制理论、计算机数学与计算机技术的综合性学科。控制系统仿真是以控制系统的模型为基础,主要用数学模型代替实际控制系统,以计算机为工具,对控制系统进行实验和研究的一种方法。在进行计算机仿真时,十分耗费时间与精力的是编制与修改仿真程序。随着系统规模的越来越大,先进过程控制的出现,就需要行的功能强大的仿真平台Math Works公司为MATLAB提供了控制系统模型图形输入与仿真工具Simulink,这为过程控制系统设计与参数整定的计算与仿真提供了一个强有力的工具,使过程控制系统的设计与整定发生了革命性的变化。
数理逻辑部分 选择、填空及判断 ?下列语句不是命题的( A )。 (A) 你打算考硕士研究生吗?(B) 太阳系以外的星球上有生物。 (C) 离散数学是计算机系的一门必修课。(D) 雪是黑色的。 ?命题公式P(P P)的类型是( A ) (A) 永真式(B) 矛盾式 (C) 非永真式的可满足式(D) 析取范式 ?A是重言式,那么A的否定式是( A ) A. 矛盾式 B. 重言式 C. 可满足式 D.不能确定 ?以下命题公式中,为永假式的是( C ) A. p→(p∨q∨r) B. (p→┐p)→┐p C. ┐(q→q)∧p D. ┐(q∨┐p)→(p∧┐p) ?命题公式P→Q的成假赋值是( D ) A. 00,11 B. 00,01,11 C.10,11 D. 10 ?谓词公式) x R xP∧ ?中,变元x是( B ) ) x ( , (y A. 自由变元 B. 既是自由变元也是约束变元 C. 约束变元 D. 既不是自由变元也不是约束变元 ?命题公式P(Q Q)的类型是( A )。 (A) 永真式(B) 矛盾式 (C) 非永真式的可满足式(D) 析取范式 ?设B不含变元x,) x→ ?等值于( A ) A (B ) ( x
A. B x xA →?)( B. ))((B x A x ∨? C. B x xA →?)( D. B x A x ∧?)(( ? 下列语句中是真命题的是( D )。 A .你是杰克吗? B .凡石头都可练成金。 C .如果2+2=4,那么雪是黑的。 D .如果1+2=4,那么雪是黑的。 ? 从集合分类的角度看,命题公式可分为( B ) A. 永真式、矛盾式 B. 永真式、可满足式、矛盾式 C. 可满足式、矛盾式 D. 永真式、可满足式 ? 命题公式﹁p ∨﹁q 等价于( D )。 A. ﹁p ∨q B. ﹁(p ∨q) C. ﹁p ∧q D. p →﹁q ? 一个公式在等价意义下,下面写法唯一的是( D )。 (A) 范式 (B) 析取范式 (C) 合取范式 (D) 主析取范式 ? 下列含有命题p ,q ,r 的公式中,是主析取范式的是 ( D )。 (A) (p q r) (p q) (B) (p q r) (p q) (C) (p q r) (p q r) (D) (p q r) (p q r) ? 设个体域是整数集合,P 代表x y ((x y )(x y x )),下面描述正确的是 ( C )。 (A) P 是真命题 (B) P 是假命题 (C) P 是一阶逻辑公式,但不是命题 (D) P 不是一阶逻辑公式 ? 对一阶逻辑公式((,)(,))(,)x y P x y Q y z xP x y ??∧∧?的说法正确的是( B ). (A) x 是约束的,y 是约束的,z 是自由的; (B) x 是约束的,y 既是约束的又是自由的,z 是自由的; (C) x 是约束的,y 既是约束的又是自由的,z 是约束的;
一填空题 所谓自动控制,就是在人直接参与的情况下,利用控制装置,对生产过程、工艺参数、目标要求等进行的调节与控制,使之按照预定的方案达到要求的指标。(没有/自动) 自动控制系统按输入量的变化规律分为系统,随动控制系统和过程控制系统,按系统中传输的信号类型分为系统和离散控制系统。(恒值控制/连续控制) 常用典型输入信号有、、、和。 对自动控制系统性能指标的基本要求是:、、。(稳/准/快)系统的传递函数描述是指系统在下,输出量的拉氏变换与的拉氏变换之比。(线性定常系统/零初始条件/输入量)由系统对数幅频特性L(ω)求系统传递函数的前提是:该系统为_______系统。 自动对位置随动系统,通常以_______信号,作为典型输入信号,来研究系统输出对时间的响应。 控制系统的稳定性只由系统的、决定,与初始条件及外作用无关。结构/参数 系统稳定的充要条件是:特征方程的所有的根的实部都必须是数。负 系统校正可分为,和。(串联校正/反馈校正/顺馈补偿) 变频调速是交流电动机一种比较理想的调速方案。变频控制方式有,矢量控制变频调速和变压变频调速等几种。(变压变频调速直接转矩控制)位置随动系统又称,主要实现有一定精度的问题。跟随系统或伺服系统/位置自动跟随 二单项选择 反馈控制系统又称为() A.开环控制系统B.闭环控制系统 C.扰动顺馈补偿系统D.输入顺馈补偿系统 在电力电子线路中,表示绝缘栅双极晶体管的文字符号为() A.BJT B.GTO C.IGBT D.GTR 位置随动系统的主反馈环节通常是() A.电压负反馈B.电流负反馈 C.转速负反馈D.位置负反馈 如果典型二阶系统的单位阶跃响应为减幅振荡(又称阻尼振荡),则其阻尼比()A.ξ<0 B.ξ=0 C.0<ξ<1 D.ξ≥1 适合应用传递函数描述的系统是:A A、单输入,单输出的线性定常系统 B、单输入,单输出的线性时变系统 C、单输入,单输出的定常系统 D、多输入,多输出的非线性系统 闭环系统的动态性能主要取决于开环对数幅频特性的:D A、低频段 B、开环增益 C、高频段 D、中频段
离散数学试题及答案 一、填空题 1设集合A,B,其中A={1,2,3}, B= {1,2}, 则A - B=_____{3}______________; ρ(A) - ρ(B)= ____{{3},{1,3},{2,3},{1,2,3}}__________ . 2. 设有限集合A, |A| = n, 则|ρ(A×A)| = ___2^(n^2)________. 3.设集合A = {a, b}, B = {1, 2}, 则从A到B的所有映射是____A1 = {(a,1), (b,1)}, A2 = {(a,2), (b,2)}, A3 = {(a,1), (b,2)}, A4 = {(a,2), (b,1)},_________ _____________, 其中双射的是______A3, A4__________. 4. 已知命题公式G=?(P→Q)∧R,则G的主析取式是____P∧?Q∧R (m5)____. 5.设G是完全二叉树,G有7个点,其中4个叶点,则G的总度数为___12______,分枝点数为_______3_________. 6设A、B为两个集合, A= {1,2,4}, B = {3,4}, 则从A?B=______{4}______; A?B=____{1,2,3,4}_________;A-B=______{1,2}_______ . 7. 设R是集合A上的等价关系,则R所具有的关系的三个特性是______自反性____________, _________对称性_________, _________传递性_____________. 8. 设命题公式G=?(P→(Q∧R)),则使公式G为真的解释有_____(1,0,0)__________, ______(1,0,1)________, ________(1,1,0)________. 9. 设集合A={1,2,3,4}, A上的关系R1 = {(1,4),(2,3),(3,2)}, R1 = {(2,1),(3,2),(4,3)}, 则R1?R2= ___{(1,3),(2,2),(3,1)}____,R2?R1 =_____{(2,4), (3,3), (4,2)}_____, R12=_______{(2,2), (3,3)}_________. 10. 设有限集A, B,|A| = m, |B| = n, 则| |ρ(A?B)| = ______2^(m*n)___________. 11设A,B,R是三个集合,其中R是实数集,A = {x | -1≤x≤1, x∈R}, B = {x | 0≤x < 2, x∈R},则A-B = _____{x | -1 ≤x < 0, x ∈R}_______ , B-A = ______{x | 1 < x < 2, x ∈R}_____ , A∩B = ______{x | 0 ≤x ≤1, x ∈R}__________ , . 13.设集合A={2, 3, 4, 5, 6},R是A上的整除,则R以集合形式(列举法)记为___________ ________{(2, 2),(2, 4),(2, 6),(3, 3),(3, 6),(4, 4),(5, 5),(6, 6)}_________. 14. 设一阶逻辑公式G = ?xP(x)→?xQ(x),则G的前束式是_____?y?x(P(y)→Q(x))________ _____.
7-1已知下列时间函数()c t ,设采样周期为T 秒,求它们的z 变换()C z 。 (a )2 ()1()c t t t = (b )()()1()c t t T t =- (c )()()1()c t t T t T =-- (d )()1()at c t t te -= (e )()1()sin at c t t e t ω-= (f )()1()cos at c t t te t ω-= 7-2已知()x t 的拉氏变换为下列函数,设采样周期为T 秒,求它们的z 变换()X z 。 (a )21()C s s = (b )()()a C s s s a = + (c )2()() a C s s s a = + (d )1 ()()()()C s s a s b s c = +++ (e )2221 ()() C s s s a = + (f )()1 ()1sT C s e s -= - 7-3求下列函数的z 反变换。 (a ) 0.5(1)(0.4)z z z -- (b ) 2()() T T z z e z e ---- (c )2 2 (1)(2) z z z ++
7-4已知0k <时,()0c k =,()C z 为如下所示的有理分式 120121212()1n n n n b b z b z b z C z a z a z a z ------++++=++++L L 则有 0(0)c b = 以及 []1 ()()n k i i c kT b a c k i T ==--∑ 式中k n >时,0k b =。 (a )试证明上面的结果。 (b )设 23220.5 ()0.5 1.5 z z C z z z z +-=-+- 应用(a )的结论求(0)c 、()c T 、(2)c T 、(3)c T 、(4)c T 、(5)c T 。 7-5试用部分分式法、幂级数法和反演积分法,求下列函数的z 反变换: (a )10()(1)(2) z E z z z = -- (b )1 12 3()12z E z z z ----+=-+ (c )2()(1)(31)z E z z z = ++ (d )2 ()(1)(0.5) z E z z z = -+ 7-6用z 变换法求下面的差分方程 (2)3(1)2()0,(0)0,(1)1x k x k x k x x ++++=== 并与用迭代法得到的结果(0)x 、(1)x 、(2)x 、(3)x 、(4)x 相比较。 7-7求传递函数为