
ANSYS有限元网格划分的基本原则
引言
ANSYS中有两种建立有限元模型的方法:实体建模和直接生成。使用实体建模,首先生成能描述模型的几何形状的几何模型,然后由ANSYS程序按照指定的单元大小和形状对几何体进行网格划分产生节点和单元。对于直接生成法,需要手工定义每个节点的位置和单元的连接关系。
一般来说对于规模较小的问题才适于采用直接生成法,常见的问题都需要先通过实体建模生成几何模型,然后再对其划分网格生成有限元模型。随着计算机性能的提高,分析模型的复杂性和规模都越来越大,而直接生成法也因其自身的局限性逐渐的被淘汰,所以正确的理解划分网格的目的和掌握划分网格的方法不论是对ANSYS的学习还是对二次开发都有重要的作用,尤其是当模型复杂度大,对模型的某些部分网格需要特殊处理时,这种对划分网格深度的理解作用更加明显。
2 常用高级网格划分方法
随着ANSYS功能的越来越强大和计算机性能的飞速提高,有限元分析向着大型化、复杂化的方向发展,而划分网格的观念也需要逐渐从二维模型向三维模型上上转变。这里主要描述三种常见的高级划分网格的方法,正确的理解和掌握这些划分网格的思想对于二次开发者来说非常的重要。
1)延伸网格划分
延伸网格划分是指将一个二维网格延伸生成一个三维网格;三维网格生成后去掉二维网格,延伸网格划分的步骤大体包括:先生成横截面、指定网格密度并对面进行网格划分、拖拉面网格生成体网格、指定单元属性、拖拉、完成体网格划分、释放已选的平面单元。
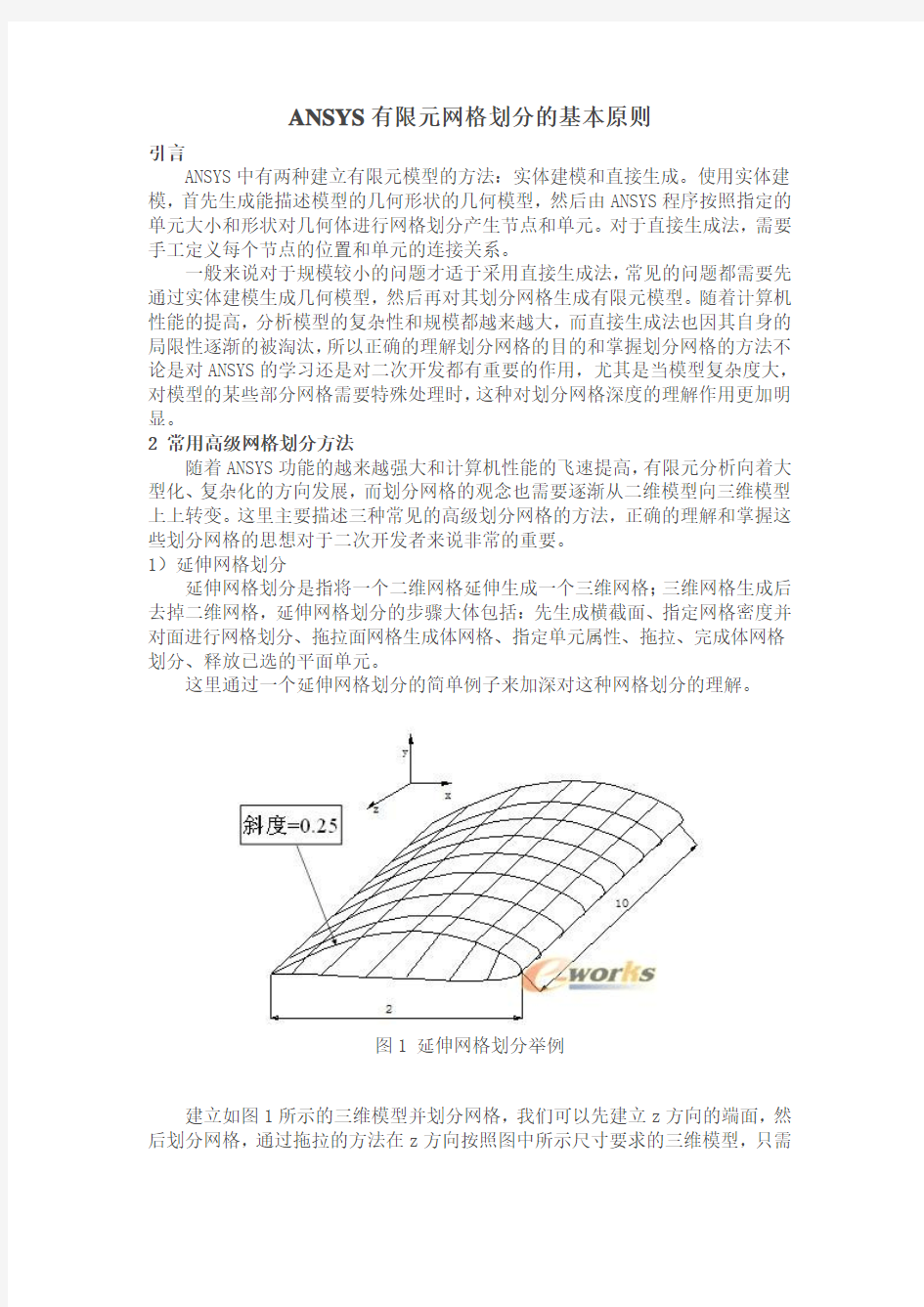
这里通过一个延伸网格划分的简单例子来加深对这种网格划分的理解。
图1 延伸网格划分举例
建立如图1所示的三维模型并划分网格,我们可以先建立z方向的端面,然后划分网格,通过拖拉的方法在z方向按照图中所示尺寸要求的三维模型,只需
一部操作便能够完成从二维有限元模型到三维有限元模型的转化。
2)自由网格与映射网格划分
映射网格划分和自由网格划分是ANSYS里最常用的两种网格划分方法。
自由网格是面和体网格划分时的缺省设置,生成自由网格比较容易主要步骤:
a、导出 MeshTool 工具, 划分方式设为自由划分;
b、推荐使用智能网格划分进行自由网格划分, 激活它并指定一个尺寸级别. 存储数据库。
c、按 Mesh 按钮开始划分网格,按拾取器中 [Pick All] 选择所有实体 (推荐)。或使用命令 VMESH,ALL 或 AMESH,ALL。
映射网格划分由于面和体必须满足一定的要求,生成映射网格不如生成自由网格容易但能够生成更规则的有限元模型。映射网格划分时实体模型必须满足以下条件:
a、面必须包含 3 或 4 条线 (三角形或四边形);
b、体必须包含4, 5, 或 6 个面 (四面体, 三棱柱, 或六面体);
c、对边的单元分割必须匹配;
d、对三角形面或四面体, 单元分割数必须为偶数。
自由网格映射网格
图2 自由网格与映射网格
3)层状网格划分
层状网格划分主要应用于2D分析生成线性过渡的自由网格,这种方法广泛应用于有以下特点的模型:平行于边线方向的单元尺寸相当、垂直于边线方向的单元尺寸和数目急剧变化、当分析要求边界单元高精度。效果图如图3。
图3层状网格效果图
3 网格划分误差估计
ANSYS通用后处理包含网格离散误差估计。误差估计是依据沿单元内边界的应力或热流的不连续性,是平均与未平均节点应力间的差值。误差估计主要有以下几个方法:
?能量百分比误差 sepc
?单元应力偏差 sdsg
?单元能量偏差 serr
?应力上、下限 smnb smxb
能量百分比误差是对所选择的单元的位移、应力、温度或热流密度的粗略估计。它可以用于比较承受相似载荷的相似结构的相似模型。这个值的通常应该在10%以下。如果不选择其他单元,而只选择在节点上施加点载荷或应力集中处的单元,误差值有时会达到50%或以上。
某一个单元的应力偏差是此单元上全部节点的六个应力分量值与此节点的平均应力值之差的最大值。
每个单元的另一种误差值是能量误差。它与单元上节点应力差值有关的, 用于计算选择的单元的能量百分比误差。
应力上下限并不是估计实际的最高或最小应力。它定义了一个确信范围。如果没有其他的确凿的验证,就不能认为实际的最大应力低于 SMXB。显示或列出的应力上下限包括:
?估计的上限– SMXB;
?估计的下限– SMNB。
4 本篇总结
本篇主要讲述了网格划分的几种常见高级方法和ANSYS的网格划分误差估计方法,只简单描述,要了解更加详细的信息可以通过ANSYS的help-Modeling and Meshing Guide部分查阅。
ANSYS有限元网格划分的基本原则
1 引言
ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。
2 ANSYS网格划分的指导思想
ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材料的体积自锁等问题
ANSYS软件平台提供了网格映射划分和自由适应划分的策略。映射划分用于曲线、曲面、实体的网格划分方法,可使用三角形、四边形、四面体、五面体和六面体,通过指定单元边长、网格数量等参数对网格进行严格控制,映射划分只用于规则的几何图素,对于裁剪曲面或者空间自由曲面等复杂几何体则难以控制。自由网格划分用于空间自由曲面和复杂实体,采用三角形、四边形、四面体进行划分,采用网格数量、边长及曲率来控制网格的质量。
3 ANSYS网格划分基本原则
3.1 网格数量
网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。
图1 位移精度和计算时间随网格数量的变化
图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随网格数量的变化。可以看出,网格较少时增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。所以应注意增加网格的经济性。实际应用时可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。
在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格,如果计算的模态阶次较高,则应选择较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。
3.2 网格疏密
网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点。在计算数据变化梯度较大的部位(如应力集中处),为了较好地反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。这样,整个结构便表现出疏密不同的网格划分形式。下面通过实例给出网格疏密对计算精度的影响。
图2 较粗网格的有限元模型图3 图2网格对应得环向应力云图
图4 缺口处较细网格图5 较密网格所得的环向应力云图
图2是中心带圆孔方板的对称模型,其网格划分反映了疏密不同的划分原则。小圆孔附近存在应力集中,采用了比较密的网格。板的四周应力梯度较小,网格分得较稀。其中图3中在缺口处网格划分较疏;而图4种在缺口处的网格划分较密。其应力计算结果:图4在缺口处的计算精度高于图2中的有限元模型计算得结果。由此可见,不同的地方应该采用不同的网格划分。因此,网格数量应增加到结构的关键部位,在次要部位增加网格是不必要的,也是不经济的。
划分疏密不同的网格主要用于应力分析(包括静应力和动应力),而计算固有特性时则趋于采用较均匀的钢格形式。这是因为固有频率和振型主要取决于结构质量分布和刚度分布,不存在类似应力集中的现象,采用均匀网格可使结构刚度矩阵和质量矩阵的元素不致相差太大,可减小数值计算误差。同样,在结构温度场计算中也趋于采用均匀网格。
3.3 单元阶次
许多单元都具有线性、二次和三次等形式,其中二次和三次形式的单元称为高阶单元。选用高阶单元可提高计算精度,因为高阶单元的曲线或曲面边界能够更好地逼近结构的曲线和曲面边界,且高次插值函数可更高精度地逼近复杂场函数,所以当结构形状不规则、应力分布或变形很复杂时可以选用高阶单元。但
高阶单元的节点数较多,在网格数量相同的情况下由高阶单元组成的模型规模要大得多,因此在使用时应权衡考虑计算精度和时间。
图6 高阶单元的有限元网格图7 高阶单元的计算结果
图6中的有限元模型采用了8节点的单元,图2中的单元采用了4节点的单元,从其计算结果中可以看出,高阶单元在应力集中处即使较粗糙的网格划分,也可以计算得到较精确的应力值。因此,在有应力集中和刚度突变的地方,应该采用高阶单元来对其进行网格划分。
增加网格数量和单元阶次都可以提高计算精度。因此在精度一定的情况下,用高阶单元离散结构时应选择适当的网格数量,太多的网格并不能明显提高计算精度,反而会使计算时间大大增加。为了兼顾计算精度和计算量,同一结构可以采用不同阶次的单元,即精度要求高的重要部位用高阶单元,精度要求低的次要部位用低阶单元。不同阶次单元之间或采用特殊的过渡单元连接,或采用多点约束等式连接。
3.4 网格质量
网格质量是指网格几何形状的合理性。质量好坏将影响计算精度。质量太差的网格甚至会中止计算。直观上看,网格各边或各个内角相差不大、网格面不过分扭曲、边节点位于边界等份点附近的网格质量较好。网格质量可用细长比、锥度比、内角、翘曲量、拉伸值、边节点位置偏差等指标度量。划分网格时一般要求网格质量能达到某些指标要求。在重点研究的结构关键部位,应保证划分高质量网格,即使是个别质量很差的网格也会引起很大的局部误差。而在结构次要部位,网格质量可适当降低。当模型中存在质量很差的网格(称为畸形网格)时,计算过程将无法进行。网格分界面和分界点,结构中的一些特殊界面和特殊点应分为网格边界或节点以便定义材料特性、物理特性、载荷和位移约束条件。即应使网格形式满足边界条件特点,而不应让边界条件来适应网格。常见的特殊界面和特殊点有材料分界面、几何尺寸突变面、分布载荷分界线(点)、集中载荷作用点和位移约束作用点等。
单元的质量和数量对求解结果和求解过程影响较大,如果结构单元全部由等边三角形、正方形、正四面体、立方六面体等单元构成,则求解精度可接近实际值,但由于这种理想情况在实际工程结构中很难做到。因此根据模型的不同特征,设计不同形状种类的网格,有助于改善网格的质量和求解精度。单元质量评价一般可采用以下几个指标:
(1)单元的边长比、面积比或体积比以正三角形、正四面体、正六面体为
参考基准。理想单元的边长比为1,可接受单元的边长比的范围线性单元长宽比小于3,二次单元小于10。对于同形态的单元,线性单元对边长比的敏感性较高阶单元高,非线性比线性分析更敏感。
(2)扭曲度:单元面内的扭转和面外的翘曲程度。
(3)疏密过渡:网格的疏密主要表现为应力梯度方向和横向过渡情况,应力集中的情况应妥善处理,而对于分析影响较小的局部特征应分析其情况,如外圆角的影响比内圆角的影响小的多。
(4)节点编号排布:节点编号对于求解过程中的总体刚度矩阵的元素分布、分析耗时、内存及空间有一定的影响。合理的节点、单元编号有助于利用刚度矩阵对称、带状分布、稀疏矩阵等方法提高求解效率,同时要注意消除重复的节点和单元。
3.5 位移协调性
位移协调是指单元上的力和力矩能够通过节点传递相邻单元。为保证位移协调,一个单元的节点必须同时也是相邻单元的节点,而不应是内点或边界点。相邻单元的共有节点具有相同的自由度性质。否则,单元之间须用多点约束等式或约束单元进行约束处理。
基于ANSYS的复杂有限元网格划分技术
1. 网格密度
有限元结构网格数量的多少将直接影响计算结果的精度和计算规模的大小。一般来说,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,怎样在这两者之间找到平衡,是每一个CAE工作者都想拥有的技术。网格较少时,增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高很少,而计算时间却大幅度增加。所以应该注意网格数量的经济性。实际应用时,可以比较两种网格划分的计算结果,如果两次计算结果相差较大,应该继续增加网格,重新计算,直到结果误差在允许的范围之内。
在决定网格数量时还应该考虑分析类型。静力分析时,如果仅仅是计算结构的变形,网格数量可以少一点。如果需要计算应力,则在精度要求相同的情况下取相对较多的网格。同样在结构响应计算中,计算应力响应所取的网格数量应该比计算位移响应的多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选取较少的网格,如果计算的阶数较高,则网格数量应该相应的增加。在热分析中,结构内部的温度梯度不大时,不需要大量的内部单元,否则,内部单元应该较多。
有限元分析原则是把结构分解成离散的单元,然后组合这些单元解得到最终的结果。其结果的精度取决于单元的尺寸和分布,粗的网格往往其结果偏小,甚至结果会发生错误。所以必须保证单元相对足够小,考虑到模型的更多的细节,使得到的结果越接近真实结果。由于粗的网格得到的结果是非保守的,因此要认真查看结果,其中有几种方法可以帮助读者分析计算结果与真实结果之间的接近程度。
最常用的方法是用对结果判断的经验来估计网格的质量,以确定网格是否合理,如通过看云图是否与物理现象相一致,如果云图线沿单元的边界或与实际现象不一致,那么很有可能结果是不正确的。
更多的评价网格误差的方法是通过比较平均的节点结果和不平均的单元结果。如在ANSYS中,提供了两条显示结果的命令:PLNS,PLES。前者是显示平均的节点结果,后者是显示不平均的单元结果。PLNS命令是计算节点结果,它是通过对该节点周围单元结果平均后得到的,分析结果是基于单元高斯积分点值,然后外插得到每个节点,因此在给定节点周围的每个单元都由自己的单元计算得到,所以这些节点结果通常是不相同的。PLNS命令是在显示结果之前将每个节点的所有结果进行了平均,所以看到的云图是以连续的方式从一个单元过渡到另外一个单元。而PLES命令不是对节点结果平均,所以在显示云图时单元和单元之间是不连续的。这种不连续程度在网格足够密(即单元足够小)的时候会很小或不存在,而在网格较粗时很大。由于PLNS结果是一个平均值,所以它得到的结果会比PLES的结果小,他们的差可以较好的表示网格的密度。
ANSYS提供了两个误差估计显示选项:SDSG是针对结果问题的,TDSG是针对热问题的。SDSG和TDSG提供了对每个单元的绝对误差的估计,可以用PLES命令来显示,很好的估计误差。
2.网格疏密
网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据分布特点。在计算数据变化梯度较大的部位(如应力集中处),为了较好的反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减少模型规模,则应划分相对稀疏的网格。
采用疏密不同的网格划分,既可以保持相当的计算精度,又可以使网格数量减少。因此,网格数量应增加到结构的关键部位,在次要部位增加网格是不必要的,也是不经济的。
3.单元阶次
ANSYS中许多单元都具有线性、二次和三次等形式,其中二次和三次单元称为高阶单元。选用高阶单元可提高计算精度,因为高阶单元的曲线或曲面边界能够更好的逼近结构的曲线和曲面的边界,且高次插值函数可以更高精度的逼近复杂场函数,所以当结构形状不规则、应力分布或变形很复杂时,可以优先选用高阶单元。
大部分接触单元应该选用高阶单元。但是选用高阶单元后,节点数大大增加,在网格数量相同的情况下由高阶单元组成的模型规则要比低阶单元组成的复杂的多,因此在使用时要综合考虑计算精度和时间。一般来说,当结构的网格数量较少时,高、低阶单元的计算结果精度相差很大,这时采用低阶单元是不合适的,应该采用高阶单元。
4.网格质量
网格质量是指网格几何形状的合理性。质量好坏将影响计算精度,质量太差的网格甚至会终止计算。直观上看,网格各边或各个内角相差不大,网格面不过分扭曲,边节点位于边界等分点附近的网格质量较好。网格质量可用细长比、锥度比、内角、翘曲量、拉伸值、边节点位置偏差等指标来衡量,这些参数均可以使用ANSYS单元检查功能来获得。在重点研究的结构关键部位,应保证划分高质量网格,如果存在个别质量很差的网格也将会引起较大的局部误差。而在次要部位,网格质量可适当降低。
在二维分析中,应该采用四边形单元。在三维分析中,应该优先采用六面体单元。以上技巧可以有效的控制节点和单元的规模,并且能保证单元质量。
5.位移协调性
位移协调是指单元上的力和力矩能够通过节点传递到相邻的单元,即单元之间必须保证联通。为保证位移协调,一个单元的节点必须同时是相邻单元的节点,而不应是内点或是边节点。相邻单元的共有节点具有相同的自由度性质。否则,单元之间必须用多点约束等式或约束单元进行约束处理,也就是用ANSYS程序的自由度耦合和约束方程来进行约束处理。
ANSYS高级分析-自适应网格
1 引言
当面对一个具体需要分析的问题时,往往无法确定什么样的网格密度能够得到满足需要的结果。基于这一点考虑,ANSYS程序提供了近似的技术自动估计特定分析类型中因为网格划分带来的误差。通过这种误差估计,ANSYS可以确定网格是否足够细。如果结果误差超出预期,程序将自动细化网格以减少误差。这一自动估计网格划分误差并细化网格的过程就叫做自适应网格划分,然后通过一系列的求解过程使得误差低于用户指定的数值。
2 自适应网格划分前提
ANSYS调用程序预先写好的宏“ADAPT.MAC”完成自适应网格划分的功能。用户的模型在使用这个宏之前必须满足如下条件:
1)标准的ADAPT过程只适用于单次求解的线性静力结构分析和线性稳态热分析。
2)模型最好应该使用一种材料类型,因为误差计算是根据平均结点应力进行的,在不同材料过渡位置往往不能进行计算。而且单元的能量误差是受材料弹性模量影响的。因此,在两个相邻单元应力连续的情况下,其能量误差也可能由于材料特性不同而不一样。在模型中同样应该避免壳厚突变,这也可能造成在应力平均时发生问题。
3)模型必须使用支持误差计算的单元类型。(见表1)
4)模型必须是可以划分网格的:即模型中不能有引起网格划分出错的部分。
表1 适用单元
3 自适应网格划分基本过程
自适应网格划分的基本过程包括如下几步:
1)首先进入前处理器(/PREP7或Main Menu>Preprocessor)。然后指定单元类型,实参和材料特性,前提是满足上面提到的条件。
2)用实体建模过程建立模型,用户不需指定单元大小也不用划分网格,ADAPT 宏会自动划分网格。
3)在PREP7中或在SOLUTION(/SOLU或Main Menu>Solution)中指定分析类型,分析选项,载荷和载荷步选项。在一个载荷步中仅施加实体模型荷载和惯性荷载(加速度,角加速度和角速度)。
4)如果在PREP7中,退出前处理器[FINISH]。(可以在SOLUTION或在初始状态下激活ADAPT宏)。
5)通过命令或菜单操作的方法激活自适应求解:
Command: ADAPT
GUI: Main Menu>Solution>Adaptive Mesh
需注意的是可以在热或结构分析中使用ADAPT宏,但不能在一次自适应分析中同时进行这两种不同类型的计算。在自适应网格划分的迭代过程中,单元的大小将作调整(在FACMN和FACMX指定的范围内)以减小或增加单元能量误差,直到误差满足指定的数值(或指定的最大求解次数)为止。
6)当自适应网格计算收敛时,程序自动将单元形状检查打开[SHPP,ON]。然后返回SOLUTION或初始状态,这取决于激活ADAPT的状态。
7)进入POST1用标准操作进行后处理。
4 总结
ANSYS每一种应用技术的提出,都有其针对性和适用区域,当对ANSYS的操作环境有了足够的熟悉之后,再对ANSYS这些独有的分析技术进行研究和应用会别有一番滋味,网格划分自适应技术作为ANSYS高级分析技术比较简单和容易理
解的一种,能够掌握和应用它能够给特定的分析带来便利和获得更加可靠精确的分析结果-学无止境,唯锐意进取得之!
1 引言
如果用户清楚某个部分网格划分的误差相对影响较小时(如应力水平较低且变化较小),可以将这些区域从自适应网格划分中排除以加快分析速度。同样,用户也许想将接近应力奇异点的部分(如集中载荷)排除掉。选择逻辑操作可以解决这类问题,如图1所示效果。
图1 选择自适应能改进有应力集中的模型
当用户选择了一个关键点集,ADAPT宏仍将包含进所有的关键点(在选择的和未选择的关键点都作网格改动),除非将ADAPT命令(Main
Menu>Solution>Adaptive Mesh)中KYKPS设为1。
如果用户选择了一个面或体集,ADAPT宏将只在选择的区域调整网格大小。此时必须在激活ADAPT宏之前在PREP7中对整个模型进行网格划分。
2 关于用户子程序-定制ADAPT宏
针对具体分析问题特点,标准的ADAPT宏往往并不能满足分析需要。例如,用户可能想同时对面和体进行网格划分,这在标准宏当中是不可以的。对于这种或其他一些类似情况,可以对ADAPT宏进行修改使之适用于特定的分析。ANSYS 程序用宏这种方式完成自适应网格划分,本身就使得用户可以对其进行相应的修改以适应不同的要求。方便的是,用户不用总是通过修改ADAPT代码的方式来定制宏。宏的三个部分可以用用户子程序的方法来修改,这个方法将ADAPT宏和用户文件分开,用户可以生成子程序由ADAPT宏来调用。这三个部分是:网格划分
命令序列,边界条件命令序列和求解命令序列。相应的用户子程序名分别是ADAPTMSH.MAC、ADAPTBC.MAC和ADAPTSOL.MAC。
2.1 关于生成用户网格划分子程序-ADAPTMSH.MAC
在ANSYS平台缺省情况下,如果模型中包含一个或多个体时,ADAPT宏将只对体划分网格而不对面进行划分。如果当前选择集中没有体,宏才对面进行划分。如果要同时对面和体进行划分的话,就要生成用户子程序ADAPTMSH.MAC来提供相应的操作。在重新划分网格之前要清楚所有这些实体中划分过网格的实体。子程序主要命令行大致如下:
C*** Subroutine ADATMSH.MAC-Your name-Job Name-Data Created
TYPE,1 !指定划分网格的单元类型属性
ACLEAR,3,5,2 !清除本程序中要重新划分网格的面和体的网格
VCLEAR,ALL
AMESH,3,5,2 !对面3和5划分网格(ADAPT不对其他面划分网格) TYPE,2 !改变单元类型,划分体
VMESH,ALL !对所有体划分网格
建议将C***行包含在文件中以区别不同的宏。这一行将在任务的输出中出现,就可以确认ADAPT宏正确地调用了用户子程序。
2.2 关于生成用户边界条件子程序-ADAPTBC.MAC
ADAPT宏在每次求解循环时都要清除并重新划分网格,因此模型的结点和单元也要不断的改变。这就使得所有的有限单元载荷,自由度固连,约束方程等施加在结点和单元的边界条件都不能使用。如果要包含这些有限单元约束时,就要使用用户子程序,ADAPTBC.MAC。在这个子程序中,可以选择结点然后定义有限单元载荷,自由度固连和约束方程。子程序主要命令行大致如下:
C*** Subroutine ADAPTBC.MAC-Your name-Hob Name-Data CReated
NSEL,S,LOC,X,0 !选择X坐标为0的结点
D,ALL,UX,0 !令选择的所有结点UX为0
NSEL,S,LOC,Y,0 !选择Y坐标为0的结点
D,ALL,UX,0 !令选择的所有结点UY为0
NSEL,ALL !选择所有结点
2.3 关于生成用户求解子程序-ADAPTSOL.MAC
ADAPT宏中的求解命令序列很简单:
/SOLU
SOLVE
FINISH
这个缺省的命令序列只能求解单个载荷步。分析用户可以将其他的命令序列加入用户子程序ADAPTSOL.MAC中。
3 自适应网格划分其他说明
用户可以象生成其他文件一样生成这些子程序。就是说可以用APDL语言的*CREATE命令(Utility Menu>Macro>Create Macro)和APDL的*END命令生成子程序,也可以用外部的文件编辑器生成子程序。当ADAPT宏调用这些子程序时,软件先搜索ANSYS根目录,再搜索用户根目录,最后是当前目录。因此,要确保其他目录中不包括与所用文件同名的文件。解释行(C***)会在输出文件中出现,可以通过它来检查是否使用了正确的文件。另外,通过在运行ADAPT宏之前用/PSEARCH,OFF(Utility Menu>Macro>Macro Search Path)指定软件只搜索ANSYS 根目录和用户当前目录可以从某种程度上减少文件混用的可能。不管这些子程序在什么位置,它们都能被找到,除非将ADAPT命令的KYMAC选项设为1。
3.1 定制ADAPT宏说明
有些情况下用户需要修改ADAPT宏但不能通过单独的用户子程序的方式,那么就需要直接修改ADAPT宏的主体。但是,因为某些原因,我们不推荐直接对ADAPT宏进行修改,因此,建议在ANSYS安装中支持一个宏的拷贝文件UADAPT.MAC,便于用户修改。
如果对UADAPT.MAC文件进行了修改,最好对修改后的文件取一个新的文件名。然后在调用时输入这个文件名。要知道的是,如果新文件名是一个“unknown command”,ANSYS将搜索上级目录,然后是登录的目录,最后是工作目录,直到找到这个宏为止。如果修改的宏只能为一个用户使用,那么存储的位置应在用户登录目录的层次之下(不能等于或高于这个目录层次)。这样,存储的低层次的文件可以通过*USE命令(Utility Menu>macro>Execute Data Block)来调用。
3.2 自适应网格划分说明
在使用自适应网格时应对以下两点有所了解:
?不需指定初始网格大小,但指定大小可能有利于自适应收敛。如果用户指定了关键点网格大小,ADAPT宏在第一次循环时使用这个值,然后在随
后的循环中进行调整。用下列命令指定单元大小:
Command: KESIZE
GUI:Main Menu>Preprocessor>-Meshing-Size>Cntrls>Keypoints-All
KPs
?如果定义了线分段数或大小比例,ADAPT宏将在每次循环中都使用这个数值而不作改变。如果没有定义任何形式的网格份数,在初始网格划分
时将使用缺省的网格大小[参见SMRTSIZE和DESIZE命令]。用下列方法
指定线分段数或大小比例:
Command: LESIZE
GUI: Main Menu>Preprocessor>-Meshing-Size Cntrls>-Lines-All
Lines
关于网格划分,还应对以下内容有所了解:
?映射网格划分适用于2-D实体和3-D壳单元。但面的映射划分效果不明显。
?映射网格划分适用于3-D实体。对体进行映射划分比自由划分效果要好的多。
?总体上说,在自适应网格中有中间结点的单元比线性单元要好。
?不要用集中载荷或尖角等引起奇异性的结构,因为此时ADAPT在这些奇异点处能量值将不收敛。如果模型中有集中载荷时,将其用施加在一个小
面上的压力等效。(或通过选择将奇异部分排除在自适应网格划分之
外。)
?在许多情况下,用一系列相对小的区域替代少数几个大的区域将得到更好的网格划分。
?如果最大响应位置已知或事先可以推测,就在附近放置一个关键点。
?如果是在交互方式下运行ADAPT,而ANSYS在没有提示出错信息时突然退出,可以在Jobmame.ADPT文件中查看自适应网格划分部分以确定出错
原因。同样,在批处理方式下运行ADAPT时,可以看Jobname.ADPT确
定出错原因。
?如果模型中有些区域有过度的扭曲时,在网格划分中就会出错。在这种情况下,用KESIZE命令(Main Menu>Preprocessor>-Meshing-Size
Cntrls>-Keypoints-Picked KPs)中SIZE域指定扭曲区域附近关键点的
最大单元长度。同时,ADAPT命令中的FACMX将设为1,阻止过度扭曲
部分单元大小增加。
?应当存储结果文件(Jobname.RST或Jobname.RTH)。在ADAPT运行过程中程序如果发生中断,结果文件中将保存ADAPT过程已完成求解的内容。
?在自适应网格运行之前应输入SAVE命令(Utility Menu>File>Save as Jobname.db)。在程序出错中断时,可以用Jobname.db重新启动计算。
4 总结
ANSY自适应网格技术在使用时需用户熟悉ANSYS-APDL语言的语法特点,因为针对不同问题需要进行特定子程序的模块开发,如果没有一定APDL宏程序的开发经验,在使用时会无从下手,这同时表明要想用好ANSYS,需要学习的东西很多且相互联系,付出总有回报,兴趣是最好的老师!
Base point and delta创建出的点重合时看不到 大部分可划分为四面体网格,但六面体网格仍是首选,四面体网格是最后的选择,使用复杂结构。 六面体(梯形)在中心质量差,四面体在边界层处质量差,边界层处用棱柱网格prism。 棱锥为四面体和六面体之间的过渡 棱柱由四面体网格被拉伸时生成 3D Sweep扫掠网格划:只有单一的源面和目标面,膨胀层可生成纯六面体或棱柱网格 Multizone多域扫掠网格:对象是多个简单的规则体组成时(六面体)——mapped mesh type映射网格类型:包括hexa、hexa/prism ——free mesh type自由网格类型:包括not allowed、tetra、hexa dominant、hexa core(六面体核心) ——src/trg selection源面/目标面选择,包括automatic、manual source手动源面选择 patch conforming:考虑一些小细节(四面体),包括CFD的膨胀层或边界层识别 patch independent:忽略一些小细节,如倒角,小孔等(四面体),包括CFD 的膨胀层或边界层识别 ——max element size 最大网格尺寸 ——approx number of elements大约网格数量 mesh based defeaturing 清除网格特征 ——defeaturing tolerance 设置某一数值时,程序会根据大小和角度过滤掉几何边 Use advanced size function 高级尺寸功能 ——curvature['k??v?t??]曲率:有曲率变化的地方网格自动加密,如螺钉孔,作用于边和面。 ——proximity[pr?k's?m?t?]邻近:窄薄处、狭长的几何体处网格自动加密,如薄壁,但花费时间较多,网格数量增加较多,配合min size使用。控制面网格尺寸可起到相同细化效果。 hex dominant六面体主导:先生成四边形主导的网格,然后再得到六面体再按需要填充棱锥和四面体单元。 ——此方法对于不可扫掠的体,要得到六面体网格时推荐 ——对内部容积大的体有用 ——对体积和表面积比小的薄复杂体无用 ——对于CFD无边界层识别 ——主要对FEA分析有用 Automatic自动网格:在四面体网格(patch conforming考虑细节)和扫掠网格(sweep)之间自动切换。 2D Quadrilateral dominant [,kwɑdr?'l?t?r?l]四边形主导 triangles['tra???g(?)l]三角形
有限元分析中的网格划分好坏直接关系到模型计算的准确性。本文简述了网格划分应用的基本理论,并以ANSYS限元分析中的网格划分为实例对象,详细讲述了网格划分基本理论及其在工程中的实际应用,具有一定的指导意义。 1 引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2 ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材
【分享】复杂几何模型的系列网格划分技术 众所周知,对于有限元分析来说,网格划分是其中最关键的一个步骤,网格划分的好坏直接影响到解算的精度和速度。在ANSYS中,大家知道,网格划分有三个步骤:定义单元属性(包括实常数)、在几何模型上定义网格属性、划分网格。在这里,我们仅对网格划分这个步骤所涉及到的一些问题,尤其是与复杂模型相关的一些问题作简要阐述。 一、自由网格划分 自由网格划分是自动化程度最高的网格划分技术之一,它在面上(平面、曲面)可以自动生成三角形或四边形网格,在体上自动生成四面体网格。通常情况下,可利用ANSYS的智能尺寸控制技术(SMARTSIZE命令)来自动控制网格的大小和疏密分布,也可进行人工设置网格的大小(AESIZE、LESIZE、KESIZE、ESIZE等系列命令)并控制疏密分布以及选择分网算法等(MOPT命令)。对于复杂几何模型而言,这种分网方法省时省力,但缺点是单元数量通常会很大,计算效率降低。同时,由于这种方法对于三维复杂模型只能生成四面体单元,为了获得较好的计算精度,建议采用二次四面体单元(92号单元)。如果选用的是六面体单元,则此方法自动将六面体单元退化为阶次一致的四面体单元,因此,最好不要选用线性的六面体单元(没有中间节点,比如45号单元),因为该单元退化后为线性的四面体单元,具有过刚的刚度,计算精度较差;如果选用二
次的六面体单元(比如95号单元),由于其是退化形式,节点数与其六面体原型单元一致,只是有多个节点在同一位置而已,因此,可以利用TCHG命令将模型中的退化形式的四面体单元变化为非退化的四面体单元,减少每个单元的节点数量,提高求解效率。在有些情况下,必须要用六面体单元的退化形式来进行自由网格划分,比如,在进行混合网格划分(后面详述)时,只有用六面体单元才能形成金字塔过渡单元。对于计算流体力学和考虑集肤效应的电磁场分析而言,自由网格划分中的层网格功能(由LESIZE命令的LAYER1和LAYER2域控制)是非常有用的。 二、映射网格划分 映射网格划分是对规整模型的一种规整网格划分方法,其原始概念是:对于面,只能是四边形面,网格划分数需在对边上保持一致,形成的单元全部为四边形;对于体,只能是六面体,对应线和面的网格划分数保持一致;形成的单元全部为六面体。在ANSYS中,这些条件有了很大的放宽,包括: 1 面可以是三角形、四边形、或其它任意多边形。对于四边以上的多边形,必须用LCCAT命令将某些边联成一条边,以使得对于网格划分而言,仍然是三角形或四边形;或者用AMAP命令定义3到4个顶点(程序自动将两个顶点之间的所有线段联成一条)来进行映射划分。 2 面上对边的网格划分数可以不同,但有一些限制条件。
血管模型网格划分 网格划分即将所用的模型划分为有限体积或单元,这里我们使用Ansys自身的网格划分器对提取出来的血管模型(STL格式的三维模型)进行网格划分。具体步骤为: 一、软件启动 单击开始---所有程序--Ansys14.0---Meshing---ICEM CFD 14.0。 二、模型导入 1、单击主菜单栏中的File---Import Geometry---STL,如下图: 主菜单烂
2、在下拉菜单对话框中选取血管模型并确定后,血管模型导入完成,如下图; 三、图形参数设置(封闭模型) 1、单击Geometry 工具栏中的Repair Geometry 图标,后单击Build Diagnostic 按钮单击Apply 按钮运行,如下图: 单击此处可调整显示边框与实体 Geometry 工具栏 Repair Geometry 按钮 单击此按钮后单击Apply 按钮 运行后端口显示封闭黄线
2、运行完成后,单击左侧工具栏中的Close Holes图标,然后单击鼠标图形按钮,而后单击模型端口处黄线并单击Apply运行,从而使模型端口封闭,模型有几个端口则反复操作几次,如下图: Close Holes按 钮运行结束 后端口封 闭 四、网格化分参数设置 1、单击Mesh工具栏的Compute Mesh按钮,选取Volume mesh按钮,后单击Compute按钮,而后单击YES按钮,进行初步的电脑网格划分; Mesh工具栏,Compute Mesh 按钮 单击此按钮,而后在下面的Mesh方法中选择,一般选择默 认的方法
运行结束后显示 网格 2、完成上步操作后,单击Mesh工具栏中的Globe mesh setup按钮,一般不更改默认设置,单击Apply按钮运行完成; 3、再次重复单击Compute Mesh按钮,后单击Apply按钮,而后单击YES按钮,进行初步的电脑网格划分,注:(1)可用多种方式进行划分而后单击融合操作,直至满意;(2)若模型有其他漏洞,程序会提示是否修复,一般选择不修复; 五、设置模型边界---共包括:出口端、入口端及墙壁 1、右键单击屏幕左侧控制树中的Part,在下拉菜单中选取Part create,而后在下面的窗口栏中Part部分对端口命名(如:input),然后在Creat Part by Selection部分单击鼠标箭头图形,再在浏览界面中左键单击所需设定的端口(如:输入端),注:只单击一次后进行下步操作,是否选中可能显示不明显,单击Apply运行完成此步操作; 2、依次完成输入端、输出端以及墙的设定。如下图:
转自宋博士的博客 如何在ANSYS WORKBENCH中划分网格经常有朋友问到这个问题。我整理了一下,先给出第一个入门篇,说明最基本的划分思路。以后再对某些专题问题进行细致阐述。 ANSYS WORKBENCH中提供了对于网格划分的几种方法,为了便于说明问题,我们首先创建一个简单的模型,然后分别使用几种网格划分方法对之划分网格,从而考察各种划分方法的特点。 1. 创建一个网格划分系统。 2. 创建一个变截面轴。 先把一个直径为20mm的圆拉伸30mm成为一个圆柱体 再以上述圆柱体的右端面为基础,创建一个直径为26mm的圆,拉伸30mm得到第二个圆柱体。 对小圆柱的端面倒角2mm。
退出DM. 3.进入网格划分程序,并设定网格划分方法。双击mesh进入到网格划分程序。 下面分别考察各种网格划分方法的特点。(1)用扫掠网格划分。 对整个构件使用sweep方式划分网格。
结果失败。 该方法只能针对规则的形体(只有单一的源面和目标面)进行网格划分。(2)使用多域扫掠型网格划分。 结果如下
可见ANSYS把该构件自动分成了多个规则区域,而对每一个区域使用扫略网格划分,得到了很规则的六面体网格。这是最合适的网格划分方法。 (3)使用四面体网格划分方法。 使用四面体网格划分,且使用patch conforming算法。 可见,该方式得到的网格都是四面体网格。且在倒角处网格比较细密。 其内部单元如下图(这里剖开了一个截面) 使用四面体网格划分,但是使用patch independent算法。忽略细节。
?、网格划分结果如下图 此时得到的仍旧是四面体网格,但是倒角处并没有特别处理。(4)使用自动网格划分方法。 得到的结果如下图
第 3章 ANSYS 13.0 Workbench网格划分及操作案例 网格是计算机辅助工程(CAE)模拟过程中不可分割的一部分。网格直接影响到求解精 度、求解收敛性和求解速度。此外,建立网格模型所花费的时间往往是取得 CAE 解决方案所 耗费时间中的一个重要部分。因此,一个越好的自动化网格工具,越能得到好的解决方案。 3.1 ANSYS 13.0 Workbench 网格划分概述 ANSYS 13.0 提供了强大的自动化能力,通过实用智能的默认设置简化一个新几何体的网 格初始化,从而使得网格在第一次使用时就能生成。此外,变化参数可以得到即时更新的网 格。ANSYS 13.0 的网格技术提供了生成网格的灵活性,可以把正确的网格用于正确的地方, 并确保在物理模型上进行精确有效的数值模拟。 网格的节点和单元参与有限元求解,ANSYS 13.0在求解开始时会自动生成默认的网格。 可以通过预览网格,检查有限元模型是否满足要求,细化网格可以使结果更精确,但是会增 加 CPU 计算时间和需要更大的存储空间,因此需要权衡计算成本和细化网格之间的矛盾。在 理想情况下,我们所需要的网格密度是结果随着网格细化而收敛,但要注意:细化网格不能 弥补不准确的假设和错误的输入条件。 ANSYS 13.0 的网格技术通过 ANSYS Workbench的【Mesh】组件实现。作为下一代网格 划分平台, ANSYS 13.0 的网格技术集成 ANSYS 强大的前处理功能, 集成 ICEM CFD、 TGRID、 CFX-MESH、GAMBIT网格划分功能,并计划在 ANSYS 15.0 中完全整合。【Mesh】中可以根 据不同的物理场和求解器生成网格,物理场有流场、结构场和电磁场,流场求解可采用 【Fluent】、【CFX】、【POLYFLOW】,结构场求解可以采用显式动力算法和隐式算法。不同的 物理场对网格的要求不一样,通常流场的网格比结构场要细密得多,因此选择不同的物理场, 也会有不同的网格划分。【Mesh】组件在项目流程图中直接与其他 Workbench分析系统集成。 3.2 ANSYS 13.0 Workbench 网格划分 ANSYS 网格划分不能单独启动,只能在 Workbench 中调用分析系统或【Mesh】组件启 动,如图 3-1 所示。 图3-1 调入分析系统及网格划分组件
Ansys Workbench 划分网格 (张栋zd0561@https://www.doczj.com/doc/2b8386778.html,) 1、对于三维几何体(对于三维几何体(3D 3D 3D) )有几种不同的网格化分方法。如图1下部所示。 图1网格划分的种类 1.1、Automatic(自动划分法) 1.2、Tetrahedron(四面体划分法) 它包括两种划分方法:Patch Conforming(A W 自带功能),Patch Independent(依靠ICEM CFD Tetra Algorithm 软件包来实现)。
步骤:Mesh(右键)——Insert——Method (操作区上方)Meshcontrl——Method (左下角)Scope——Geometry Method——Tetrahedrons(四面体网格) Algorithm——Patch Conforming (补充:Patch Independent该算法是基于Icem CFD Tetra的,Tetra部分具有膨胀应用,其对CAD许多面的修补均有用,包括碎面、短边、较差的面参数等。在没有载荷或命名选项的情况下,面和边无需考虑。) 图2四面体网格分两类
图3四面体划分法的参数设置 1.3、Hex Dominant(六面体主导法) 1.4、Sweep(扫掠划分法) 1.5、MultiZone(多区划分法) 2、对于面体或者壳二维几何 对于面体或壳二维(2D),A W有一下: Quad Dominant(四边形单元主导) Triangles(三角形单元) Uniform Quad/Tri(均匀四面体/三角形单元) Uniform Quad(均匀四边形单元) 3、网格参数设置 下图为缺省设置(Defaults)下的物理环境(Physics Preferance)
(1) 网格划分定义:实体模型是无法直接用来进行有限元计算得,故需对它进行网格划分以生成有限元模型。有限元模型是实际结构和物质的数学表示方法。 在ANSYS中,可以用单元来对实体模型进行划分,以产生有限元模型,这个过程称作实体模型的网格化。本质上对实体模型进行网格划分也就是用一个个单元将实体模型划分成众多子区域。这些子区域(单元),是有属性的,也就是前面设置的单元属性。 另外也可以直接利用单元和节点生成有限元模型。 实体模型进行网格划分就是用一个个单元将实体模型划分成众多子区域(单元)。 (2)为什么我选用plane55这个四边形单元后,仍可以把实体模型划分成三角 形区域集合??? 答案:ansys为面模型的划分只提供三角形单元和四边形单元,为体单元只提供四面体单元和六面体单元。不管你选择的单元是多少个节点,只要是2D单元,肯定构成一个四边形或者是三角形,绝对没有五、六边形等特殊形状。网格划分也就是用所选单元将实体模型划分成众多三角形单元和四边形子区域。 见下面的plane77/78/55都是节点数目大于4的,但都是通过各种插值或者是合并的方式形成一个四边形或者三角形。 所以不管你选择什么单元,只要是对面的划分,meshtool上的划分类型设置就只有tri和quad两种选择。 如果这个单元只构成三角形,例如plane35,则无论你在meshtool上划分设置时tri还是quad,划分出的结果都是三角形。
所以在选用plane55单元,而划分的是采用tri划分时,就会把两个点合并为一个点。如上图的plane55,下面是plane单元的节点组成,可见每一个单元上都有两个节点标号相同,表明两个节点是重合的。 。 同样在采用plane77 单元,进行tri划分时,会有三个节点重合。这里不再一一列出。(3)如何使用在线帮助: 点击对话框中的help,例如你想了解plane35的相关属性,你可以
自适应网格划分 何为网格自适应划分? ANSYS程序提供了近似的技术自动估计特定分析类型中因为网格划分带来的误差。(误差估计在ANSYS Basic Analysis Procedures Guide第五章中讨论。)通过这种误差估计,程序可以确定网格是否足够细。如果不够的话,程序将自动细化网格以减少误差。这一自动估计网格划分误差并细化网格的过程就叫做自适应网格划分,然后通过一系列的求解过程使得误差低于用户指定的数值(或直到用户指定的最大求解次数)。 自适应网格划分的先决条件 ANSYS软件中包含一个预先写好的宏,ADAPT.MAC,完成自适应网格划分的功能。用户的模型在使用这个宏之前必须满足一些特定的条件。(在一些情况下,不满足要求的模型也可以用修正的过程完成自适应网格划分,下面还要讨论。)这些要求包括: 标准的ADAPT过程只适用于单次求解的线性静力结构分析和线性稳态热分析。 模型最好应该使用一种材料类型,因为误差计算是根据平均结点应力进行的,在不同材料过渡位置往往不能进行计算。而且单元的能量误差是 受材料弹性模量影响的。因此,在两个相邻单元应力连续的情况下,其 能量误差也可能由于材料特性不同而不一样。在模型中同样应该避免壳 厚突变,这也可能造成在应力平均是发生问题。 模型必须使用支持误差计算的单元类型。(见表3-1) 模型必须是可以划分网格的:即模型中不能有引起网格划分出错的部分。 表3-1 自适应网格划分可用单元 2-D Structural Solids PLANE2 2-D 6-Node Triangular Solid PLANE25 Axisymmetric Harmonic Solid PLANE42 2-D 4-Node Isoparametric Solid PLANE82 2-D 8-Node Solid PLANE83 Axisymmetric Harmonic 8-Node Solid 3-D Structural Solids SOLID45 3-D 8-Node Isoparametric Solid SOLID64 3-D Anisotropic Solid SOLID73 3-D 8-Node Solid with Rotational DOF SOLID92 3-D 10-Node Tetrahedral Solid SOLID95 3-D 20-Node Isoparametric Solid 3-D Structural Shells
第3章Workbench网格划分 3.1 网格划分平台 ANSYS Workbench中提供ANSYS Meshing应用程序(网格划分平台)的目标是提供通用的网格划分格局。网格划分工具可以在任何分析类型中使用。 ●FEA仿真:包括结构动力学分析、显示动力学分析(AUTODYN、ANSYS LS/DYNA)、 电磁场分析等。 ●CFD分析:包括ANSYS CFX、ANSYS FLUENT等。 3.1.1 网格划分特点 在ANSYS Workbench中进行网格划分,具有以下特点: ●ANSYS网格划分的应用程序采用的是Divide & Conquer(分解克服)方法。 ●几何体的各部件可以使用不同的网格划分方法,亦即不同部件的体网格可以不匹配 或不一致。 ●所有网格数据需要写入共同的中心数据库。 ●3D和2D几何拥有各种不同的网格划分方法。
ANSYS Workbench 15.0从入门到精通 3.1.2 网格划分方法 ANSYS Workbench中提供的网格划分法可以在几何体的不同部位运用不同的方法。 1.对于三维几何体 对于三维几何体(3D)有如图3-1所示的几种不同的网格划分方法。 图3-1 3D几何体的网格划分法 (1)自动划分法(Automatic) 自动设置四面体或扫掠网格划分,如果体是可扫掠的,则体将被扫掠划分网格,否则将使用Tetrahedrons下的Patch Conforming网格划分器划分网格。同一部件的体具有一致的网格单元。 (2)四面体划分法(Tetrahedrons) 四面体划分法包括Patch Conforming划分法(Workbench自带功能)及Patch Independent划分法(依靠ICEM CFD Tetra Algorithm软件包实现)。四面体划分法的参数设置如图3-2所示。 图3-2 四面体划分法的参数设置 Patch Independent网格划分时可能会忽略面及其边界,若在面上施加了边界条件,便不能忽略。它有两种定义方法:Max Element Size用于控制初始单元划分的大小;Approx number of Elements用于控制模型中期望的单元数目(可以被其他网格划分控制覆盖)。 当Mesh Based Defeaturing设为ON时,在Defeaturing Tolerance选项中设置某一数值时,程序会根据大小和角度过滤掉几何边。 56
ANSYS自适应网格划分 (1) 何为网格自适应划分? ANS YS程序提供了近似的技术自动估计特定分析类型中因为网格划分带来的误差。(误差估计在ANSYS Basic Analysis Procedures Gui第五章中讨论。)通过这种误差估计,程序可以确定网格是否足够细。如果不够的话,程序将自动细化网格以减少误差。这一自动估计网格划分误差并细化网格的过程就叫做自适应网格划分,然后通过一系列的求解过程使得误差低于用户指定的数值 (或直到用户指定的最大求解次数)。 自适应网格划分的先决条件 ANSYS软件中包含一个预先写好的宏,ADAPT.MAC完成自适应网格划分的功能。 用户的模型在使用这个宏之前必须满足一些特定的条件。(在一些情况下,不满足要求的模型也可以用修正的过程完成自适应网格划分,下面还要讨论。)这些要求包括: 标准的ADAPT过程只适用于单次求解的线性静力结构分析和线性稳态热分析。模型最好应该使用一种材料类型,因为误差计算是根据平均结点应力进行的,在不同材料过渡位置往往不能进行计算。而且单元的能量误差是受材料弹性模量影响的。因此,在两个相邻单元应力连续的情况下,其能量误差也可能由于材料特性不同而不一样。在模型中同样应该避免壳厚突变,这也可能造成在应力平均是发生问题。 模型必须使用支持误差计算的单元类型。 模型必须是可以划分网格的:即模型中不能有引起网格划分出错的部分。 自适应网格划分可用单元 2-D Structural Solids PLANE2 2-D 6-Node Triangular Solid PLANE25 Axisymmetric Harmonic Solid
ANSYS网格划分详细介绍 众所周知,对于有限元分析来说,网格划分是其中最关键的一个步骤,网格划分的好坏直接影响到解算的精度和速度。在ANSYS中,大家知道,网格划分有三个步骤:定义单元属性(包括实常数)、在几何模型上定义网格属性、划分网格。在这里,我们仅对网格划分这个步骤所涉及到的一些问题,尤其是与复杂模型相关的一些问题作简要阐述。一、自由网格划分 自由网格划分是自动化程度最高的网格划分技术之一,它在面上(平面、曲面)可以自动生成三角形或四边形网格,在体上自动生成四面体网格。通常情况下,可利用ANSYS 的智能尺寸控制技术(SMARTSIZE命令)来自动控制网格的大小和疏密分布,也可进行人工设置网格的大小(AESIZE、LESIZE、KESIZE、ESIZE等系列命令)并控制疏密分布以及选择分网算法等(MOPT命令)。对于复杂几何模型而言,这种分网方法省时省力,但缺点是单元数量通常会很大,计算效率降低。同时,由于这种方法对于三维复杂模型只能生成四面体单元,为了获得较好的计算精度,建议采用二次四面体单元(92号单元)。如果选用的是六面体单元,则此方法自动将六面体单元退化为阶次一致的四面体单元,因此,最好不要选用线性的六面体单元(没有中间节点,比如45
号单元),因为该单元退化后为线性的四面体单元,具有过刚的刚度,计算精度较差;如果选用二次的六面体单元(比如95号单元),由于其是退化形式,节点数与其六面体原型单元一致,只是有多个节点在同一位置而已,因此,可以利用TCHG命令将模型中的退化形式的四面体单元变化为非 退化的四面体单元,减少每个单元的节点数量,提高求解效率。在有些情况下,必须要用六面体单元的退化形式来进行自由网格划分,比如,在进行混合网格划分(后面详述)时,只有用六面体单元才能形成金字塔过渡单元。对于计算流体力学和考虑集肤效应的电磁场分析而言,自由网格划分中的层网格功能(由LESIZE命令的LAYER1和LAYER2域控制)是非常有用的。二、映射网格划分 映射网格划分是对规整模型的一种规整网格划分方法,其原始概念是:对于面,只能是四边形面,网格划分数需在对边上保持一致,形成的单元全部为四边形;对于体,只能是六面体,对应线和面的网格划分数保持一致;形成的单元全部为六面体。在ANSYS中,这些条件有了很大的放宽,包括: 1 面可以是三角形、四边形、或其它任意多边形。对于四边以上的多边形,必须用LCCAT命令将某些边联成一条边,以使得对于网格划分而言,仍然是三角形或四边形;或者用AMAP命令定义3到4个顶点(程序自动将两个顶点之间的
ANSYS 入门教程 (5) - 网格划分技术及技巧之 网格划分技术及技巧、网格划分控制及网格划分高级技术 第 3 章网格划分技术及技巧 3.1 定义单元属性 单元类型 / 实常数 / 材料属性 / 梁截面 / 设置几何模型的单元属性 3.2 网格划分控制 单元形状控制及网格类型选择 / 单元尺寸控制 / 部网格划分控制 / 划分网格 3.3 网格划分高级技术 面映射网格划分 / 体映射网格划分 / 扫掠生成体网格 / 单元有效性检查 / 网格修改 3.4 网格划分实例 基本模型的网格划分 / 复杂面模型的网格划分 / 复杂体模型的网格划分 创建几何模型后,必须生成有限元模型才能分析计算,生成有限元模型的方法就是对几何模型进行网格划分,网格划分主要过程包括三 个步骤: ⑴定义单元属性 单元属性包括:单元类型、实常数、材料特性、单元坐标系和截面号等。 ⑵定义网格控制选项 ★对几何图素边界划分网格的大小和数目进行设置; ★没有固定的网格密度可供参考; ★可通过评估结果来评价网格的密度是否合理。 ⑶生成网格 ★执行网格划分,生成有限元模型; ★可清除已经生成的网格并重新划分; ★局部进行细化。 3.1 定义单元属性 一、定义单元类型 1. 定义单元类型 命令: ET, ITYPE, Ename, KOP1, KOP2, KOP3, KOP4, KOP5, KOP6, INOPR ITYPE - 用户定义的单元类型的参考号。 Ename - ANSYS 单元库中给定的单元名或编号,它由一个类别前缀和惟一的编号组成,类别前缀可以省略,而仅使用单元编号。 KOP1~KOP6 - 单元描述选项,此值在单元库中有明确的定义,可参考单元手册。也可通过命令KEYOPT进行设置。 INOPR - 如果此值为 1 则不输出该类单元的所有结果。 例如: et,1,link8 ! 定义 LINK8 单元,其参考号为 1;也可用 ET,1,8
ANSYS有限元网格划分的基本原则 默认分类 2009-05-20 13:56:46 阅读508 评论0 字号:大中小订阅 1 引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2 ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材料的体积自锁等问题 ANSYS软件平台提供了网格映射划分和自由适应划分的策略。映射划分用于曲线、曲面、实体的网格划分方法,可使用三角形、四边形、四面体、五面体和六面体,通过指定单元边长、网格数量等参数对网格进行严格控制,映射划分只用于规则的几何图素,对于裁剪曲面或者空间自由曲面等复杂几何体则难以控制。自由网格划分用于空间自由曲面和复杂实体,采用三角形、四边形、四面体进行划分,采用网格数量、边长及曲率来控制网格的质量。 3 ANSYS网格划分基本原则 3.1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。
Ansys划分网格原则 1、网格的数量 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格,如果计算的模态阶次较高,则应选择较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。 2、网格的疏密: 划分疏密不同的网格主要用于应力分析(包括静应力和动应力),而计算固有特性时则趋于采用较均匀的钢格形式。这是因为固有频率和振型主要取决于结构质量分布和刚度分布,不存在类似应力集中的现象,采用均匀网格可使结构刚度矩阵和质量矩阵的元素不致相差太大,可减小数值计算误差。同样,在结构温度场计算中也趋于采用均匀网格。 3、单元阶次 增加网格数量和单元阶次都可以提高计算精度。因此在精度一定的情况下,用高阶单元离散结构时应选择适当的网格数量,太多的网格并不能明显提高计算精度,反而会使计算时间大大增加。为了兼顾计算精度和计算量,同一结构可以采用不同阶次的单元,即精度要求高的重要部位用高阶单元,精度要求低的次要部位用低阶单元。不同阶次单元之间或采用特殊的过渡单元连接,或采用多点约束等式连接。 4、网格质量 划分网格时一般要求网格质量能达到某些指标要求。在重点研究的结构关键部位,应保证划分高质量网格,即 使是个别质量很差的网格也会引起很大的局部误差。而在结构次要部位,网格质量可适当降低。当模型中存在质量很差的网格(称为畸形网格)时,计算过程将无法进行。 5、网络分界面个分界点 结构中的一些特殊界面和特殊点应分为网格边界或节点以便定义材料特性、物理特性、载荷和位移约束条件。即应使网格形式满足边界条件特点,而不应让边界条件来适应网格。常见的特殊界面和特殊点有材料分界面、几何尺寸突变面、分布载荷分界线(点)、集中载荷作用点和位移约束作用点等。 6、位移协调性 位移协调是指单元上的力和力矩能够通过节点传递相邻单元。为保证位移协调,一个单元的节点必须同时也是相邻单元的节点,而不应是内点或边界点。相邻单元的共有节点具有相同的自由度性质。否则,单元之间须用多点约束等式或约束单元进行约束处理。 7、网格布局 当结构形状对称时,其网格也应划分对称网格,以使模型表现出相应的对称特性(如集中质矩阵对称)。不对称布局会引起一定误差。 8、节点和单元编号 节点和单元的编号影响结构总刚矩阵的带宽和波前数,因而影响计算时间和存储容量的大小,因此合理的编号有利于提高计算速度。但对复杂模型和自动分网而言,人为确定合理的编号很困难,目前许多有限元分析软件自带有优化器,网格划分后可进行带宽和波前优化,从而减轻人的劳动强度。
ANSYS基础教程——网格划分 关键字:ANSYS ANSYS教程网格划分 信息化调查找茬投稿收藏评论好文推荐打印社区分享 本文将详细介绍网格划分的3个步骤并讨论网格划分的其他选项.内容包括:多种单元属性、控制网格密度、改变网格、映射网格划分、过渡网格划分、网格的拖拉、扫掠网格划分及实践。 ·网格划分包含以下3个步骤: –定义单元属性 –指定网格的控制参数 –生成网格 A. 多种单元属性 ·如前所述, 每个单元有以下与之相关的属性: –单元类型(TYPE) –实常数(REAL) –材料特性(MAT) ·许多FEA模型有多种属性. 例如,下图所示的筒仓有两种单元类型, 三种实常数, 以及两种材料. ·只要您的模型中有多种单元类型(TYPEs), 实常数(REALs) 和材料(MATs), 就必须确保给每一种单元指定了合适的属性. 有以下3种途径: –在网格划分前为实体模型指定属性 –在网格划分前对MAT, TYPE,和REAL进行“总体的”设置 –在网格划分后修改单元属性 ·如果没有为单元指定属性, ANSYS将MAT=1, TYPE=1, 和REAL=1作为模型中所有单元的缺省设置. 注意, 采用当前激活的TYPE, REAL, 和MAT 进行网格操作. 为实体模型指定属性 1.定义所有需要的单元类型,材料, 和实常数. 2.然后使用网格工具的“单元属性”菜单条(Preprocessor > MeshTool): –选择实体类型后按SET键. –拾取您想要指定属性的实体.
–在后续的对话框设置适当的属性.或选择需要的实体,使用VATT, AATT, LATT, 或KATT命令. 3.当您为实体划分网格时, 它的属性将自动转换到单元上. 使用总体的属性设置 1.定义所有需要的单元类型,材料, 和实常数. 2.然后使用网格工具的“单元属性”菜单条(Preprocessor > MeshTool): –选择Global后按SET 键. –在“网格划分属性”对话框中激活需要的属性组合. 这些被视为激活的TYPE, REAL,和MAT 设置. 或使用TYPE, REAL, 和MAT命令.
Ansys网格划分功能简介 第一讲 1、首先确定单元形状: Mshape,key,dimension Dimension:2D or 3D,对与2D(3D)来说,key=0,四边形(六面体)单元,key=1,三角形(四面体)单元。 2、确定单元的划分方式(free or mapped) Mshkey, value,其中value=1,mapped划分方式,value=0,free,value=2,尽量mapped,如果不可以,进行free. 3、中节点的设置:mshmid 对与mapped的划分方式是大家最喜欢的,优点不比多说。 首先说一下(area)的mapped的划分方式: ●基本条件:(1)面有三条或四条线组成(2)对边划分相等的等份,或者符合过度模 式(transition pattern).(3)若是三条线组成的面,所有边必须等份。满足三者之一,可以采用mapped方式,进行area网格划分。 若面有多余四条的线组成:可以采用:lcomb(推荐首先采用)或lccat变成四条。对于线、面、体上的keypoint,ansys在划分网格时,将有节点设置。 ●Transition pattern(过度模式) 对于面来说,有两种过度模式可选(以有四条线组成的面为例): 第一种:满足条件:对边的等分份数之差必须相等。 第二种:满足条件:一组对边等分份数相等,另一组对边等分份数之差为偶数(even number) 其次,体(volume)的mapped方式划分方法(单元形状只能采用六面体形状): ●基本条件:(1)体必须有六个面、五个面、或者四个面构成(2)若是六个面,必须 是对边等分份数相等(3)五面体的边(edge)必须等分,上下底面的边必须偶数 等分(4)四面体上所有的边必须偶数等分。 若不满足上述条件,可以采用aadd或accat将面连接,若有线需要连接,先对面进 行,然后对线进行lccat. ●体的过渡模式 主要把面的过度模式理解清楚,可以很容易的理解体的过度模式。还有一点,就是,对边等分份数相等。有4中过度模式。(可以参看ansys帮助)。 第二讲网格划分控制(meshing control) 网格划分的控制主要考虑以下三个因素: (1)单元形状(element shape)(2)中节点的设置(midside node placement)(3)单元尺寸(element size). 现在分别加以说明: ●单元形状:对于2d的面的划分,可以采用三角形单元或者四边形单元。对于3D的 体的划分,要么采用六面体单元,要么采用四面体单元。二者的混合使用一般不推 荐使用。若采用(transitional pyrmid element)过度的金字塔单元,可以采用二者的混 合使用。单元形状、划分方式的指定第一讲已经有描述(略)。 ●中间节点设置的控制(controling placement of midside nodes) ansys默认情况下,将具有中节点的单元的中节点设置在边界线上或边界的面上。
第一章ANSYS的安装和配置 ANSYS程序包括两张光盘:一张是ANSYS经典产品安装盘,另一张是ANSYSWorkbench产品安装盘。本章以ANSYS10.0为例介绍ANSYS 的安装、配置、启动及ANSYS的相关知识。 第一节ANSYS的安装 一、安装ANSYS对系统的要求 安装ANSYS对计算机系统的要求如下。 1.硬件要求 ①内存至少256M; ②采用显存不少于32M的显卡,分辨率至少为1024x768,色彩为真彩色32位: ③硬盘剩余空间至少2G; ④安装网卡,设置好TCP/IP协议,并且TCP/IP协议绑定到此网卡上。注意在TCP/1P协议中要设定计算机的hostname。 2.软件系统要求 操作系统为Windows2000或WindowsXP以上。 二、安装ANSYS前的准备工作 1.拷贝文件 先将安装光盘中MAGNITUDE文件夹拷入计算机中,如D:LMAGNITUDE,用Windows的记事本打开D:~IAGNITUDE文件夹中的ansys.dat文件,该文件的第一行内容为"SERVERhostOOOOO(30000001055”,把host改为你的计算机名,如1wm是我的主机名,则host 改为Ivan。执行命令所有程序>附件,命令提示符进入DOS状态,键入1PCONFIG/ALL回车,所显示的physicaladdress即为网卡号,本例中计算机网卡的physicaladdress为000c6e10c8531055,则ansys.dat文件的第一行内容修改为“SERVERlwm000c6e10c8531055”,以原文件名存盘退出。 2.生成许可文件 运行D:\MAGNITUDE文件夹中的keygen.bat文件,生成license.dat,该文件就是ANSYS的许可文件,将它存放在指定目录下永久保存,本例中存放在D:LMAGNITUDE文件夹中。 三、安装ANSYS ①将ANSYS的安装光盘放入光驱中,出现如图1-1的画面,选择Install ANSYS 10.0开始安装AHSYS10.0。 ②开始运行ANSYS安装程序,出现ANSYS安装欢迎界面如图1-2的所示,选择Next按钮进行下一步安装。 第2页
Workbench Mesh网格划分分析步骤网格划分工具平台就是为ANSYS软件的不同物理场和求解器提供相应的网格文件,Workbench中集成了很多网格划分软件/应用程序,有ICEM CFD,TGrid,CFX,GAMBIT,ANSYS Prep/Post等。网格文件有两类: ①有限元分析(FEM)的结构网格: 结构动力学分析,电磁场仿真,显示动力学分析(AUTODYN,ANSYS LS DYNA); ②计算流体力学(CFD 分析)分析的网格:用于ANSYS CFX,ANSYS FLUENT,Polyflow; 这两类网格的具体要求如下: (1)结构网格: ①细化网格来捕捉关心部位的梯度,例如温度、应变能、应力能、位移等; ②大部分可划分为四面体网格,但六面体单元仍然是首选; ③有些显示有限元求解器需要六面体网格; ④结构网格的四面体单元通常是二阶的(单元边上包含中节点); (2)CFD网格: ①细化网格来捕捉关心的梯度,例如速度、压力、温度等; ②由于是流体分析,网格的质量和平滑度对结果的精确度至关重要,这导致较大的网格数量,经常数百万的单元; ③大部分可划分为四面体网格,但六面体单元仍然是首选,流体分析中,同样的求解精度,六面体节点数少于四面体网格的一半。 ④CFD网格的四面体单元通常是一阶的(单元边上不包含中节点) 一般而言,针对不同分析类型有不同的网格划分要求: ①结构分析:使用高阶单元划分较为粗糙的网格; ②CFD:好的,平滑过渡的网格,边界层转化(不同CFD 求解器也有不同的要求); ③显示动力学分析:需要均匀尺寸的网格;
注:上面的几项分别对应Advanced中的Element Midside Nodes,以及Sizeing中的 Relevance Center,Smoothing,Transition。 网格划分的目的是对CFD (流体) 和FEM (结构) 模型实现离散化,把求解域分解成可得到精确解的适当数量的单元。 用户需要权衡计算成本和网格划分份数之间的矛盾。细密的网格可以使结果更精确,但是会增加CPU计算时间和需要更大的存储空间,特别是有些不必要的细节会大大增加分析需求。而有些地方,如复杂应力梯度区域,这些区域需要高密度的网格,如下图所示。一般而言,我们需要特别留意几何体中物理量变化特别大的区域,这些地方的网格需要划分得细密一些!