多用户水声通信仿真平台设计
作者:赵极远杨威
导师:王逸林
(哈尔滨工程大学水声工程学院,黑龙江省哈尔滨市 150001)
摘要:多用户水声通信仿真平台由服务器和客户端两部分组成,在PC机上实现服务器功能,在以Cyclone III FPGA为核心的SOPC系统上实现客户端功能。信号通过客户端的数据采集及处理后,传输至服务器,并与模拟水声信道的冲击响应进行卷积等运算,最后将运算结果转发给其他客户端,实现多用户水声通信仿真功能。
关键词:水声通信;仿真平台;服务器;客户端;SOPC
Design of Multi-user Simulation Platform for Underwater Acoustic Communication
Author: ZHAO Jiyuan YANG Wei
Tutor: WANG Yilin
(College of Underwater Acoustic Engineering , Harbin Engineering University ,Heilongjiang Harbin 150001)
Abstract:Multi-user simulation platform for underwater acoustic communication consists of two parts, the server and the client. The server runs on a PC, and the client runs on a SOPC system based on Altera's Cyclone III FPGA. After the signal is collected and processed by the client, it will be transmitted to the server and convoluted with impulse response of underwater acoustic channel, and then the result will be transmitted to other clients, so that the system achieves the function of multi-user simulation platform for underwater acoustic communication.
Keywords: underwater acoustic communication; simulation platform; server; client; SOPC
随着科学技术的进步,海洋资源的探测与开发日益受到注目。开发海洋资源需要母船、水下机器人和深海固定开发基站协同作业,因此对一个信息化、现代化的海洋通信网络有着极为迫切的需求。由于声波信号是目前已知的唯一能在海洋中远距离传播的信号,水声通信网络应运而生。然而为构建水声通信网络而进行的海洋试验,却由于海上试验高昂的费用和冗长的试验周期让人望而却步,因此设计一套可以在实验室进行模拟海洋环境的水声通信网络仿真平台有着它独到的意义。
国际上,以美国为代表,早在二十世纪七十年代就有较完善的仿真系统问世,我国直到二十世纪九十年代中期才开始有一些对于海洋声信道模型、现代先进声纳信号处理模型等仿真系统的研究。对于水声通信网络仿真系统的研究也仅仅是PC机软件模拟,由软、硬件相结合方法构建的水声通信网络仿真平台恰当的弥补了这一方面的空白,对水声通信网络的研究有着很好的辅助和补充作用。
1仿真平台构建
为达到模拟海洋水声信道、仿真多个用户之间水声通信的目的,该仿真平台采用标准接口,可以连接多个实际的水声设备(例如用主被动声纳、通信设备、导航和定位设备等作为平台的用户,以下简称为用户),仿真它们之间的水声传播情况。该平台可以仿真各种海洋环境,帮助测试水声设备的功能,完成水声通信、水声定位和导航、水声对抗等试验。同时可以存储大量实际测量的水声信道数据或真实的水声波形数据,可以“重现”已进行的湖海试验,帮助问题分析并改进。
由于该仿真平台需要仿真多个水声通信节点之间水声通信状况,故系统采用服务器-客户端模式。服务器端负责水声信道模型建立、人机交互界面显示、TCP/IP多线程设计以及Ad Hoc自组网实现等功能;客户端负责水声信号采集、数字信号处理以及信号数据转发等功能。
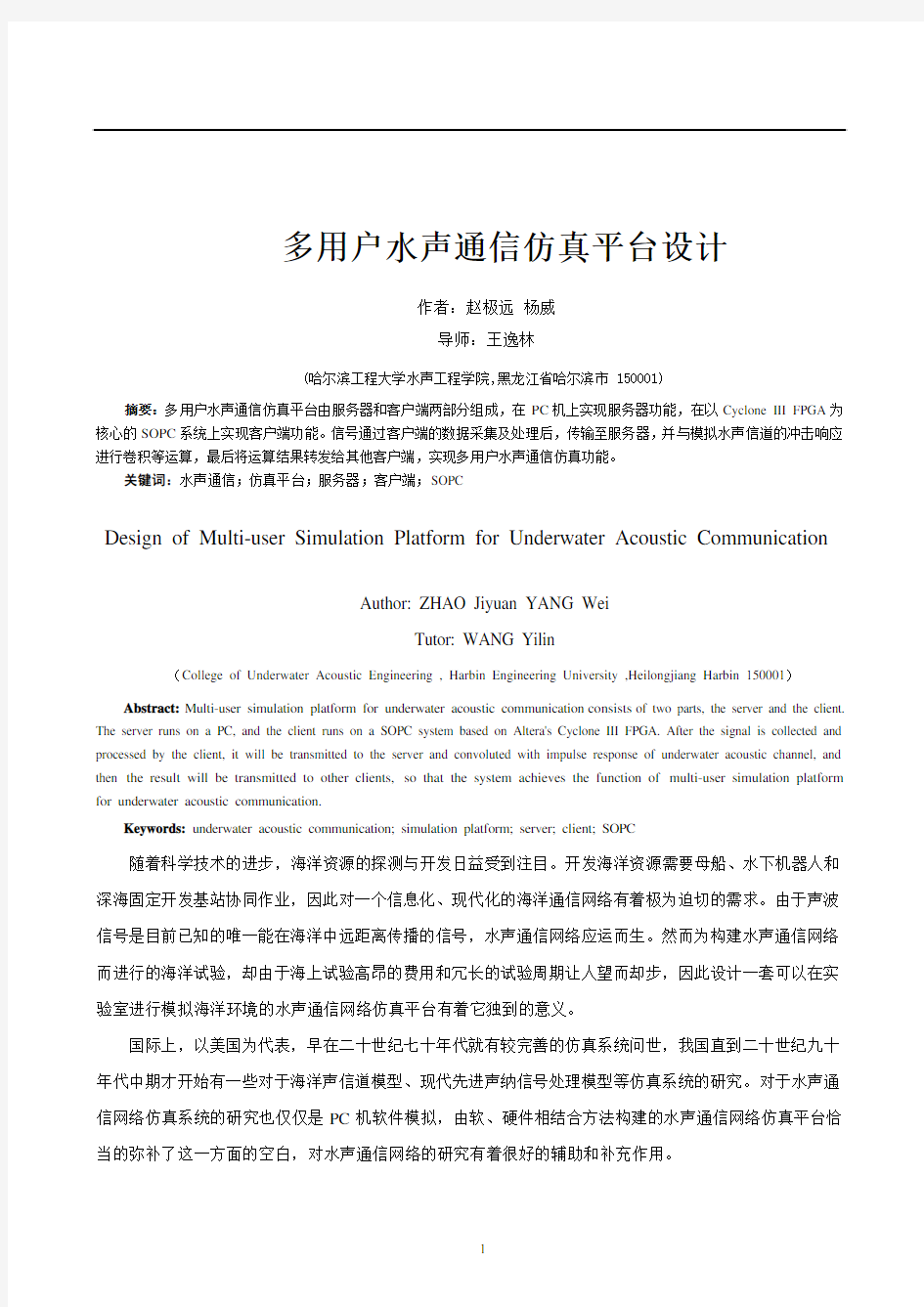
如图1所示,以两节点通信为例,在实际的水声通信中,通信节点发射的声波信号是通过水声换能器发送到海洋中,声波信号在经过水下声信道后被接收方水听器接收,传送给接收方通信节点。在仿真系统中,我们通过客户端(通信接口)、以太网传输以及服务器水声信道建模来模拟声波信号离开通信节点后的传输过程。这样,软、硬件结合的仿真系统便可以更真实的仿真水声通信网络试验状况。
图1 水声通信实际情况与仿真情况对比
如图1所示,在实际水声试验中,换能器完成电信号和声信号之间的转换,声信号在海洋环境中传播。水声仿真试验则通过以太网直接将电信号(水声波形数据)传送至信道服务器,通过水声信道仿真软件对信道建模,在服务器中用水声传播仿真软件模拟在水声信道中的传播,再将结果回传给用户。系统中服务器配有大容量存储器,可以对原始信号进行记录和回放,达到回放实际试验过程的目的。
2服务器端设计简介
2.1水声信道理论建模
水声信道实际中是时变、空变的信道,在仿真系统中,我们认为其变化缓慢,近似为时不变的系统。本仿真平台要求能够实时显示接收信号的畸变波形,一方面要求计算的精度高,另一方面要求计算的速度快。射线声学以其计算的高精度、高速度、物理含义的显著性成为本系统的首选建模基础理论。
射线声学理论体系由如下两个方程构建:
02
2=???+
?L A A
L (1) 22
02
)(n c c L =
=? (2)
式(1)为声程方程,决定声线轨迹的走向;式(2)为强度方程,确定声线的强弱。声程方程决定了声线的传播轨迹;强度方程决定了沿声线束管能量的传输情况。射线理论优势在于计算快速,含义清晰;同波动理论相比,其对脉冲信号传播的描述更为直观。射线声学方法的缺陷在于其为严格波动理论的近似解,在传播声信号频率较低时(波导宽度H 与波长λ可比拟),射线声学求解结果存在较大偏差;但在高频情况(波导宽度H ?波长λ),偏差极为微小,可忽略不计。在深海声传播中,海底界面影响较小,声线结构更为规律,射线方法计算精度会更高。即射线声学理论更适合分析在深海波导中传播的高频声信号。
多途相干水声信道的系统函数如下:
∑=??=N
i i i t A t h 1
)()(τδ (3)
式(3)中:N 为声波传播途径的总数;A i 为声波沿第i 条传播途径到达接收点的信号幅度值;τi 为声波
沿第i 条传播途径到达接收点的信号传播时延。此系统函数通过A i 反映了声信号在传播过程中幅度的衰减
特性;通过N 与τi 反映了不同声线的传播特性,进而体现了信道的多途效应。因而只要能求解出A i 、τi 的值,就可以近似构建所需的信道系统函数,并逼真的反映出水下声信道的传输特性。
根据信号系统理论,若令通信节点所发射的声信号为s (t ),则其经过水声信道作用后的输出信号y (t )应为s (t )与信道系统函数的卷积:
)()()(*)()(1
t n t s A t h t s t y N
i i i +??==∑=τ (4)
式(4)中s (t )为信道内的加性噪声,n (t )体现了水下噪声的特性。接收信号的幅度畸变、接收时延及受噪声干扰等信息均可以通过观察y (t )波形得出。
实际运算中对于较长的信号序列使用卷积计算较为缓慢。考虑到运算的实时性,此时则可以利用FFT 快速算法求解s (t )、?(t )的频谱S (f )、H (f ),将两者频谱相乘后IFFT 即得到输出信号y (t )。此流程由公式
表示如下:
f
S
IFFT
H
f
FFT
IFFT
f
t s
?
=
=
y?
IFFT
t
=
Y
(
(
)
))(
(
)))
(
(
)
(
)(t
h
FFT
(
(
(
))
至此,完成了水下声信道模型的建立及接收波形的生成的理论分析。据此可以进一步设计实际使用的信道建模与波形处理软件模块。
2.2 人机交互界面设计
根据水声仿真平台的设计需要,显控界面的
主要任务如下:
1)设定节点功能与坐标分布;
2)显示节点分布态势;
3)调用信道计算软件;
4)利用网络通信模块功能,接收/发射节点数据;
5)实现数据与信道系统函数的卷积等算法。
根据实际海洋试验需要,人机交互界面功能
为设定通信节点的工作方式与三维坐标值,将节图2 人机交互界面功能
点分布水平态势在模拟海面显示,模拟海域长50公里,宽50公里,深500米。
图3 多用户水声通信仿真平台PC端界面
如图3所示,红色数字1部分显示的是水声节点在模拟海洋中的水平分布位置;红色数字2部分包括三个显示卡,分别是信道建模显示、收发信号的波形显示以及通信参数显示;数字3部分是节点收发状态以及节点处于海洋空间位置的设定;数字4部分是节点分布的相对坐标;数字5部分用于控制该服务器显控软件的工作方式。
3 客户端设计
3.1 功能需求
在水声信道中进行通信的信号主要为音频信号,所以客户端需要有采集音频信号的能力,同时为了可以对矢量水声信号进行采集,因此该客户端应具有采集至少四路模拟信号的能力;为了减轻PC机服务器端计算的负担,要求客户端应该有实时信号处理的能力;同时客户端与服务器间的通信是通过以太网来完成,因此要求客户端需要有以太网数据传输能力。
3.2 硬件系统设计
3.2.1硬件系统总体结构
硬件系统主要完成信号采集、处理及转发等功能。根据平台需求设计硬件电路,客户端系统采用SOPC 方案。如图4所示,FPGA芯片为系统控制及数据传输核心。对于水声信号的采集由音频CODEC完成,以太网数据传输硬件电路通过FPGA内置的三速以太网控制器结合外部PHY芯片方式完成,Nor Flash用于操作系统代码存储,SDRAM用于程序运行,Nand Flash用于数据存储,JTAG用于系统调试,RS232用于与GPS相连完成时间同步,同时为提高系统灵活性预留出了与ARM/DSP等处理器相连的通用I/O接口。
图4 硬件系统总体结构
通过前期Quartus II软件对FPGA资源消耗的估算,基本功能实现需使用约12k LE(逻辑单元)的FPGA 资源,同时估算得出需使用约200个FPGA用户I/O,故采用Cyclone III系列EP3C25F324芯片。为高保真采集水声设备发出的音频信号,系统采用TI公司最高192ksps采样率并带有minidsp功能的音频编解码芯片TLV320AIC3254。对于以太网PHY芯片的选择,为便于硬件实现,选用Altera公司Nios II处理器HAL所支持的四种PHY芯片之一的DP83848芯片。电源部分全部选用TI公司的LDO以及DC-DC芯片。
3.2.2信号采集部分设计
系统采用TI公司TLV320AIC3254立体声数字信号编解码器(CODEC)作为信号采集芯片,该芯片采样频率为8KHz至192KHz,完全满足水声信号采集系统需求。同时其控制接口采用I2C协议、数据传输接口采用音频I2S协议,通信协议简单,易于实现。在本设计中每个客户端都集成两片CODEC,可以得到四路数据采集通道,为矢量水声信号的采集提供了保障。
图5 TLV320AIC3254的接口设计图
3.2.3系统控制及信号处理部分设计
整个系统的控制和数字信号处理工作都是在基于SOPC技术的FPGA上完成。该部分,FPGA配置芯片采用EPCS16,RS232采用Maxim公司MAX3221芯片,Nor Flash采用支持CFI(Common flash interface)的SPANSION公司S29GL01GP芯片,SDRAM采用HYNIX公司HY57V561620芯片,Nand Flash采用SAMSUNG公司K9F1G08芯片。
3.2.4数据传输部分设计
数据传输模块用于将采集到的数据通过以太网接口实时传送至服务器。由于Altera Nios II的HAL目前仅支持四种PHY芯片,根据实际需求考虑,该系统采用National半导体公司的DP83848以太网物理层芯片,它支持10/100Mb/s速率传输,满足系统要求。
图6 以太网接口设计原理图
3.3 FPGA内部结构设计
FPGA是系统的核心,整个系统的任务调度、系统管理都是FPGA来完成的。如图7所示,本设计中FPGA内部结构分为两部分,分别是蓝色的Nios II处理器部分和绿色的FPGA接口部分。
图7 FPGA内部总体结构
3.3.1 Nios II处理器设计
Nios II处理器的设计主要由Altera公司提供的SOPC Builder软件完成。如图8所示,一个基本的Nios II处理器中应包括CPU、JTAG UART、SDRAM Controller、SYSTEM ID、SYSTEM TIMER、TRISTATE BRIDGE以及FLASH Controller等模块。根据实际需要,本设计中还包括了Triple-Speed Ethernet控制器以及I2C控制器和I2S传输PIO接口等。
图8 Nios II处理器设计
3.3.2 Nand Flash接口设计
Nand Flash不同于Nor Flash的随机访问,它是顺序访问器件。同时Nand Flash采用地址、数据线复用的方式[1]。
表2.1K9F1G08X0A寻址方式
注:第1、2周期为列地址,第3、4周期为行地址。
如表1所示是K9F1G08X0A的寻址方式,由于选用的是8线Nand Flash芯片,需要四个周期才能完成一次寻址操作。V erilog HDL编写的Nand Flash接口模块在经ModelSim软件仿真后得到图9所示结果。
图9Nand Flash接口模块ModelSim仿真结果
3.3.3 TLV320AIC3254接口设计
本设计中分别采用I2C协议和I2S协议完成对TLV320AIC3254的控制和数据传输。这两个协议模块都是采用Verilog HDL语言编写。由于I2S设计相对简单,本节主要介绍I2C接口设计。
I2C协议采用两线结构:串行数据线(SDA)和串行时钟线(SCL)。由于硬件结构中这两根信号线都是通过上拉电阻拉高,所以在Verilog HDL程序设计时,对于SDA和SCL信号线的控制都是通过将其电平拉低来实现。根据TI公司提供的图10所示I2C协议时序图设计I2C协议功能模块。经ModelSim软件仿真后得到图10所示结果。
图10 ModelSim仿真结果
本设计中使用Verilog HDL编写I2C协议功能模块,并通过Nios II调用对TLV320AIC3254进行配置,由于系统中使用了两片TLV320AIC3254,因此在I2C模块中增加了片选信号线,使处理器可以任意配置两片CODEC。
3.4 Nios II 处理器程序设计
在针对Nios II处理器进行程序设计之前,要对Nios II IDE系统属性进行设定。如图11所示,在调试状态时stdout、stderr以及stdin都是通过JTAG端口传输到PC机IDE界面中进行调试。而在系统调试完毕后,stdout、stderr和stdin将被设置为null。系统程序和只读数据存储在Flash中,而用于读写的数据以及堆栈都是在SDRAM中运行。
图11 Nios II-IDE系统属性设置
3.4.1系统控制uC/OS-II程序设计
如图12所示,为客户端软件程序执行流程图,在Nios II运行后,首先初始化uC/OS-II以及TCP/IP 协议栈,然后开始运行客户端程序,Nios II处理器接收服务器的命令通过I2C协议对CODEC进行配置,配置CODEC实现相应的ADC或DAC功能,然后程序进入无限循环状态。
图12 客户端软件程序流程图
3.4.2数据传输TCP/IP程序设计
客户端以太网的数据传输基于NicheStack TCP/IP协
议栈,首先在Nios II IDE系统属性中进行如图13所示的
设定,由于仿真平台客户端数固定,为简化设计,选用静
态IP方式。
相对TCP/IP服务器,客户端程序简单许多,如图14
程序所示,首先建立socket,当socket成功建立后,设置图13 NicheStack TCP/IP 设定
主机端口、主机IP等信息,然后调用connect函数连接服务器,当成功连接服务器后,就可以调用read、write等函数来进行数据的收发操作。
图14 客户端socket建立
3.4.3数据采集CODEC程序设计
根据图12所示客户端软件流程图可知,数据采集部分的程序设计主要分成两部分:1、通过I2C接口配置TLV320AIC3254相关寄存器使芯片工作于ADC或DAC模式;2、通过I2S接口接收ADC采集的数据或者发送数据至DAC。
由于I2C模块是Verilog HDL编写并挂载到PIO接口上,首先要通过Nios II IDE提供的HAL函数库中的IOWR_ALTERA_A V ALON_PIO_DA TA和IORD_ALTERA_A V ALON_PIO_DA TA编写对于I2C的驱动程序。然后根据TLV320AIC3254数据手册上的汇编语言初始化CODEC例程,编写适用于Nios II处理器的C语言初始化程序。
由于I2S协议中是在一根数据线上交替传输左右两个声道的信号。因此当CODEC配置为ADC功能时通过检测WCLK的边沿来判断到达的数据属于哪一声道。同理在CODEC配置为DAC时也需要通过检测WCLK边沿来选择发送相应声道数据。由于涉及到WCLK的边沿检测,所以编写这部分程序时需要首先通过alt_irq_register函数对中断服务进行注册,然后编写相关中断服务子程序。
4 系统测试及实物展示
系统测试主要验证多用户水声通信仿真平台客户端性能。客户端基本功能为音频信号采集及以太网数据传输。测试主要包括两部分内容:1、客户端系统独立测试CODEC功能;2、与服务器端联合测试以太网数据传输功能。
4.1 硬件系统CODEC部分测试
CODEC部分测试包括ADC和DAC两部分。一、ADC功能测试,由信号发生器产生正弦信号,通过CODEC采集,然后通过Quartus II集成的SignalTap II嵌入式逻辑分析仪抓取,同时将通过Nios II IDE获取的数据使用Matlab绘图,测试结果如图15、16所示。二、DAC功能测试,通过Matlab生成测试数据,将测试数据添加至Nios II的C语言程序中,通过DAC输出后由示波器抓取得到,测试结果如图17所示。
图15 SignalTap II抓取结果
图16 Matlab绘图结果图17 DAC示波器抓取结果
4.2 服务器软件测试
对于客户端与服务器的联合测试,如图18所示,由一个客户端发送数据,经服务器接收并相应处理后转发给其他客户端。本次测试中采用在理想水声信道中接收和发送单频信号的测试方法。在显控界面设计中,服务器接收数据的节点波形为红色,发送数据的节点波形为绿色。如图19所示,服务器接收节点四所发送的数据并将其转发给另外三个客户端。
图18 客户端-服务器联合测试演示
图19 服务器显控界面以太网数据传输波形显示效果
4.3 实物展示
图20所示为客户端系统硬件实物图,图21所示为多用户水声通信仿真平台实物展示。主体包括一台服务器,四个客户端硬件系统,一台路由器。
图20 客户端系统硬件实物图21多用户水声通信仿真平台
5 结论
多用户水声通信仿真平台通过服务器端软件与客户端硬件的完美结合,可以最大程度上在实验室模拟仿真海洋试验时所处海况,在实际湖海试验前进行仿真试验节约了大量人力物力的消耗,对于节约试验成本以及缩短项目周期有着重要的意义。
在多用户水声通信仿真平台中,服务器端很好的完成了信道建模、显控界面及以太网传输等功能。目前平台对于水声信道建模只是采用了适合深海信道的射线声学理论建模,由于平台预留了软件接口,因此也可以采用适于浅海信道的简正波方法以及抛物线近似等理论进行水声信道建模,使该仿真平台适用于浅海试验的仿真。
在多用户水声通信仿真平台中,客户端系统采用SOPC方案,在单片FPGA中完成系统控制、信号处理及数据传输的功能,相对于传统ARM+DSP方案有着信号处理能力强、系统集成度高、硬件设计简单及系统稳定性好等优势。最高192ksps的CODEC采样率以及峰值100Mb/s的以太网传输速率,完全满足仿真平台对于音频信号采集及数据传输的需求。经实际测试,客户端系统工作稳定,达到预期目标。
参考文献
[1] 利用MAX II CPLD 实现NAND 闪存接口,Altera Corporation,2007
论文原创性声明
我们声明所呈交的论文是在王逸林老师的指导下进行的研究工作及取得的研究成果,除了文中的参考文献外,论文中不包含其他人已经发表或撰写过的研究成果。
作者签名:赵极远杨威
导师签名:王逸林
撰写日期:二零一一年六月二十日
摘自:HLA-RTI仿真平台的设计与实现 1.有关术语: ●联邦(Federation:是指用于达到某一特定仿真目的的分布式仿真系统,它由若干相互作 用的联邦成员(简称成员)构成。 ●联邦成员:所有参与联邦运行的应用程序都可以称为联邦成员。联邦中的成员有多种 类型,如用于联邦数据采集的数据一记录器,用于和实物接口的实物仿真代理成员,用于管理联邦的联邦管理器等等,其中最典型的成员是仿真应用(Simulation)。仿真应用对某个实体的行为进行仿真。 ●OMT :是一种标准的结构框架,它是描述HLA 对象模型的关键部件。之所以采用标准 化的结构框架,是因为它可以做到以下几点: 1、提供一个通用的、易于理解的机制,用来说明联邦成员之间的数据交换和运行期间的协作。 2、提供一个标准的机制,用来描述一个潜在的、联邦成员所具备的与外界进行数据交换及协作的能力。 3、有助于促进通用的对象模型开发工具的设计和应用。 HLA OMT中,HLA定义了两类对象模型,FOM和SOM ●FOM (Federation Object Model):是描述仿真联邦的对象模型,主要目的是提供联邦成 员之间用公共的、标准化的格式进行数据交换的规范,它描述了在仿真运行过程中将参与联邦成员信息交换的对象类、对象类属性、交互类、交互类参数的特性。 ●SOM (Simulation Object Model):是单一联邦成员的对象模型,它描述了联邦成员可以 对外公布或需要订购的对象类、对象类属性、交互类、交互特性,这些反映了成员在参与联邦运行时具有的能力。基于OMT的 SOM开发是一种规范的技术和方法,它便于模型的建立、修改、生成和管理,便于对已开发的仿真资源的再利用,能够促进建模走向标准化。 ●MOM (Management Object Model):为了便于在仿真运行过程中对RT工、联邦以及联 邦成员进行监控和管理,HLA定义了管理对象模型(MOM )o MOM描述了一种使得对联邦的管理和控制信息能以一种和联邦成员间交互相一致的方式在联邦中传递的机制。联邦成员和RTI可以利用MOM来控制RTI、联邦乃至单个成员的运行,获取状态信息。 ●联邦执行数据文件(FED文件):是FOM开发的结果,是所有联邦成员间为交互(或互 操作)目的而达成的“协议”。它记录了在联邦运行期间所有参与联邦交互的对象类、交互类及其属性、参数和相关的路径空间信息。 ●对象类和类属性(Object Class&Attribute):对象类是指参与联邦交互的对象实例所属的 类别,对象类由类属性构成。对象实例是联邦中的交互实体,可持续存在。 ●交互类和参数(Interaction Class & Parameters):在HLA中,成员间的交互可以通过更新 /反射对象类属性来完成,也可以通过发送/接收交互实例完成。交互类由参数组成。交互类不可持续存在,它可代表瞬间的行为。 2.联邦和联邦成员规则: 规则和术语主要用来描述联邦对象模型FOM o RTI的规则比较简单,包括的联邦规则和联邦成员规则两个部分。可以简单地归纳如下: 联邦规则主要包括: 1、每个联邦必须有一个FOM,它与HLA OMT里定义的兼容。 2、联邦中,所有与仿真有关的对象实例应该在联邦成员中描述,而不是在RTI中。 3、联邦运行过程中,各联邦成员必须通过RTI进行交互。
水声扩频通信中OFDM技术应用 作者:郭中源, 陈岩, 陈庚, 贾宁 作者单位:中国科学院声学研究所 相似文献(10条) 1.学位论文黄晓萍水声扩频通信技术研究2006 水声信道是一个时变、空变的随机信道,是一个非理想信道。使用扩频信号可以在一定程度上对付信道传输中的多途性;利用扩频信号做相关获得的增益可以使得在负信噪比的条件下进行信号的恢复。扩频通信的抗干扰、抗衰落能力也很强,这确实是对复杂多变的水声信道的一个很好的解决方案,它不仅可以解决长距离移动目标的通信问题,还能进行敌我识别、导航和定位等。 要想进一步提高水下扩频通信系统的抗多普勒、抗多途能力,就要在接收端采取额外措施——多普勒频率搜索和多途分量的提取,再加上同步信号搜索和信号的解扩,这将会带来很大量的相关运算。没有一个快速算法,将不能实时的完成对采集信号的处理。 将H序Walsh快速变换应用到水声扩频通信系统中接收信号的上述相关处理中,可很大程度地提高算法的执行速度,从而可以实现数据的实时采集和实时处理。 本论文以克服水下多途干扰、补偿多普勒频移、实现低信噪比(甚至负信噪比)下高可靠性的水声通信为目标,研究了直接序列扩频在水声通信中应用的有关问题,并通过仿真和试验验证了这种通信技术的良好性能和可行性。 本文所作的工作主要有以下几个方面: 1.构建了一个基于快速Walsh变换,以m序列作为扩频码、RS纠错方式、带有多普勒补偿和多途时延补偿的水下直接序列扩频通信系统框架。用MATLAB仿真,验证了其可行性。 2.以PC机为平台,计算机声卡作为A/D和D/A,Windows操作系统下将算法和声卡的播放、录音联合编程,完成了该水下扩频通信系统的物理实现。 3.在基于PC104硬件平台,嵌入式系统VxWorks下,实现了此通信系统。 4.对这两种计算机操作系统下的扩频通信分别进行了电调试、水池调试、松花湖实验、青岛海试,并实现了两者之间的半双工通信。在发射功率≤30w,传输距离为7~25km,接收信噪比0dB左右,实现了误码率低于10-6的数据传输。 2.会议论文黄建波.韩梅.黄海水声扩频通信系统误码率研究2007 误码率模型是水声扩频通信系统性能的关键指标之一.扩频技术是通信领域较为成熟的成果,扩频技术在水声通信中的应用给我们带来了新的问题.本文首先介绍了扩频技术在水声通信方面的应用;然后,从声纳方程出发,运用平滑平均场理论,研究信嗓比在水声扩频通信系统中的变化情况,得到误码率模型;最后运用该模型研究典型浅海负跃层环境下误码率的规律.从仿真的结果来看,该模型在原理上基本符合水声扩频通信系统,结果具有一定的指导性和较强的实用性,达到了较为理想的效果。 3.学位论文顾建松伪时反水声通信技术研究2005 水声数字通信近年来在国际上发展迅速,时间反转法处理是一项新颖的技术,受到国际水声界的很大关注。 本论文结合国家863课题“水下仪器水声数据传输技术研究”和中船重工集团公司支撑课题“水声网络节点技术研究”,通过对水声信道特点的比较、分析,选定伪时反处理技术和扩频通信技术,作为本课题的研究重点。 水声信道存在多径效应和多卜勒频偏;相对于水声信号的传输、接收,水声信道等效为一个滤波器。并由此推导出发射信号、接收信号的时域和频域的计算公式。发送编码信号之前,先发射探针信号(Probe)进行信道估计,结合扩频通信技术,进行255码元的信息编码和BPSK信号调制,再将编码信号和探针信号进行卷积并发射。在接收端,将包含信道响应的探针信号和卷积信号进行共轭处理,以消除信道响应在相位上对编码信号的影响。信道估计和系统帧同步信号采用线性调频信号。通过m序列的拷贝相关检测发射的信息。 在理论研究的基础上,建立了水声信道模拟器。用MATLAB进行计算机仿真,验证伪时反处理技术和扩频通信技术的性能,用各种图表曲线比对了几种处理方法的差异。由仿真结果得知:时间反转处理技术和扩频通信技术从理论上可用于水下远程通信,可以有效抑制水声信道的多径效应,但对于多卜勒频偏造成的干扰其效果一般。 最后,进行海洋试验验证,对海试采集的水声数据进行计算机处理,用图表比对二种处理方法的差异。由海试数据处理结果得知:时间反转处理技术和扩频通信技术可用于水下远程通信,可以有效抑制水声信道的多径效应。 4.会议论文熊省军.张宏滔.周士弘水声扩频通信中的RAKE接收机2006 水声信道的衰变多径特性一直以来是水声通信中难以解决的问题,扩频技术近年来在水声通信中得到广泛关注.本文研究水声扩频通信中的RAKE接收机.介绍了直接序列扩频系统的基本原理,分析了RAKE接收机实现多径分集的过程,给出了其抗多径干扰的仿真结果. 5.学位论文高风波基于扩频技术的远程声遥控系统研究2004 随着海洋开发和国防发展的需要,远程水声遥控系统受到了广泛的重视,遥控距离越来越远.但随着遥控距离的加大(>100km),传送遥控信息的水声信道变得更加复杂,声遥控系统要达到高可靠传输的技术难度也越来越大.针对上述问题,该文在水声信道分析的基础上,设计了一种基于扩频技术的自主应答式远程声遥控系统,系统着重考虑了系统的调制方式和自主应答的方式.近年来扩频技术在水声通信特别是远程水声通信中的使用越来越多.由于它具有很好的抗多径、抗衰落和低的截获概率的优点,特别适合于处于低信噪比环境且保密性要求比较高的远程声遥控系统,所以我们采用扩频技术作为遥控系统的通信方式.远程声遥控系统的遥控方式有直接遥控和中继遥控.我们分别比较了两种方式的接收端信噪比,并考虑了保密性要求,采用中继遥控作为远程声遥控系统的遥控方式.论文首先分析了远程声遥控信道传输特性,分别利用Kraken简正波和射线跟踪模型对深海和浅海水声信道的传输特性进行分析,对信道的多径结构、衰落和环境噪声进行了计算,并在此基础上设计了基于扩频技术的自主应答式远程声遥控系统方案.论文还对扩频通信的关键技术进行了仿真研究,针对远程声遥控系统的特点,讨论了扩频码、扩频方式、相关接收和同步问题,同时讨论了适合远程声遥控系统的纠错编码技术.最后给出了远程声遥控系统的发射平台的组成和各部分设计.相信该论文的研究结果和方法能为远程水声遥控系统提供重要的研究和设计参考. 6.期刊论文韩梅.黄建波.黄海.HAN Mei.HUANG Jian-bo.HUANG Hai水声扩频通信系统通信距离模型的改进与仿真 -计算机仿真2008,""(4) 通信距离是水声扩频通信系统性能的关键指标之一.扩频技术是通信领域较为成熟的成果,在水声通信中的应用带来了新的问题.首先对传统的声纳优质因子距离模型进行了阐述;然后介绍并分析了扩频通信技术在水声通信中的应用,依靠平滑平均场理论,对传统的声纳优质因子通信距离预报模型进行改进,首次提出了适合水声扩频通信的距离模型;最后进行仿真计算,从仿真的结果来看,该模型无论在原理上,还是仿真结果都符合水声扩频通信系统的实际,具有一定的指导性和较强的实用性,达到了较为理想的效果,可以为各种水声扩频通信系统提供通信距离预报. 7.期刊论文宋新见.殷冬梅.惠俊英基于矢量信号处理的水声定位系统-海洋工程2003,21(3) 将传统的水声定位系统与矢量水听器相结合,设计了一种全新的轻便型长基线被动水声定位系统.介绍了系统的组成和工作原理,并结合近年来出现的矢量信号处理技术,设计了新的实时信号处理软件.经湖试和海试,系统的可行性得到了初步的验证. 8.期刊论文王晋兴.朱敏.王季煜.WANG Jinxing.ZHU Min.WANG Jiyu水声扩频通信中多假设反馈自适应均衡算法 研究-微计算机应用2009,30(11) 研究了复杂多变的水声信道条件下直接序列扩频-码分复用(DS/SS-CDMA)通信技术.本文将空间分集-多普勒频移补偿-自最佳自适应判决反馈均衡算法应用到水声DS/SS-CDMA通信,提出了基于码片速率的多假设反馈自适应均衡算法.应用该均衡算法可以恢复经过水声信道传输后扩频信号的相关特性.对
. 视频监控平台建设 设 计 方 案 XXXXXX有限公司 2013 年 10 月
XX视频监控平台建设实施方案 目录 一、概述 (3) 二、现状和建设条件 ............................................................................................................................. 错误!未定义书签。 三、系统需求分析 (7) 四、系统总体设计 (9) 五、系统设备方案设计 (10) 六、管理结构 ...................................................................................................................................................... 错误!未定义书签。 七、实现功能 (15) 八、联网方式 (16) 九、监控平台功能简介 (17) 十、典型工程案例照片 ............................................................................................................. 错误!未定义书签。 十一、项目进度安排......................................................................................................................... 错误!未定义书签。 十二、项目验收.......................................................................................................................................... 错误!未定义书签。 十三、设备清单 (22) 十四、项目概算 (24)
水声通信系统中的信道编码技术研究 信道编码定理为人们探索信道的最佳编码方案提供了理论依据,但并没有指明如何获得好码。目前,出现了多种信道编码方案,如RS 码、卷积码、级联码等。本文简要介绍了RS 码和卷积码的基本原理,并进行了相应的计算机仿真,并给出了加入了RS 码和卷积码水声通信系统的水池实验数据,结果表明利用信道编码技术能够提高水声通信系统的误码性能。 (一)Reed -Solomon 码 1960 年I.S Reed 和G .Solomond 提出RS 码,又称Reed -Solomon 码,RS 码是一类纠错能力很强的多进制BCH 码。 RS 码是在GF(q)上长度为N=q-1的本原BCH 码。冗余根据可纠正错误确定,通常等于2t 个字符。这样,编码具有k=q-2t-1个信息字符。这种码具有N 个信息字符,可纠正t 个错误。长度为N ,设计距离为=q-k δ的RS 码的生成多项式为: )())()(()(1321-----=δααααx x x x x g (1) 本论文系统中实现的编码器按图1工作。开始编码前,向A0~A13或A0~A11单元写入信息字符(分别对应1个或2个可纠错码)。P0~P15单元记载类构造器算出的校验多项式的系数值。然后校验多项式系数和信息字相乘并相加,如图所示。运算的结果得出校验字符,存入A0(此时,信息字符向左移位)。生成过程继续,直到A15出现信息字高位元素。这样,在编码中,为纠正1个错误,必须进行2次迭代;为纠正2个错误,必须进行4次。 ∑ 图1 RS 码编码器的结构 纠错码的译码问题,一直是编码理论中最感兴趣的课题之一。RS 在短和中的码长下,具有很好的纠错性能,构造容易,故得到广泛应用。 RS 的译码基本上分为3步:第一步是由接收到的R(x)计算出伴随式;第2步由伴随式找出错误图样E(x);第3步由R(x)- E(x)得到可能发送的码字C(x)。 记q(x)为信息多项式,则发送码字C(x)=q(x)g(x),接收到的码字:
视频监控平台概要设计说明书
文件更2改摘要1 :
目录 1. 弓I言 (5) 1.1. 编写目的 (5) 1.2. 背景 (5) 1.3. 术语 (6) 1.4. 预期读者与阅读建议 (6) 1.5. 参考资料 (7) 2. 总体设计 (7) 2.1. 设计目标 (7) 2.2. 运行环境 (8) 2.3. 网络结构 (8) 2.4. 总体设计思路和处理流程 (9) 2.5. 模块结构设计 (13) 2.6. 功能需求与程序模块的关系 (22) 2.7尚未解决的问题 .......................................... 错误!未定义书签。 3. 接口设计 (48) 3.1. 用户接口 (48) 3.2. 外部接口 (52) 3.3. 内部接口 (65) 4. 界面总体设计 (81) 5. 数据结构设计 (84)
6. 系统安全设计........................................... 错误!未定义书签。 6.1. 数据传输安全性设计...................................... 错误!未定义书签。 62 .......................................................................................................... 应用系统安全性设计错误!未定义书签。 63 .......................................................................................................... 数据存储安全性设计错误!未定义书签。 7. 系统部署(可选) (84)
仿真测试系统 系统概述 FireBlade系统仿真测试平台基于用户实用角度,能够辅助进行系统方案验证、调试环境构建、子系统联调联试、设计验证及测试,推进了半实物仿真的理论应用,并提出了虚拟设备这一具有优秀实践性的设计思想,在航电领域获得了广泛关注和好评 由于仿真技术本身具备一定的验证功能,因此与现有的测试技术有相当的可交融性。在航电设备的研制和测试过程中,都必须有仿真技术的支持:利用仿真技术,可根据系统设计方案快速构建系统原型,进行设计方案的验证;利用仿真验证成果,可在系统开发阶段进行产品调试;通过仿真功能,还可对与系统开发进度不一致的子系统进行模拟测试等。 针对航电设备产品结构和研制周期的特殊性,需要建立可以兼顾系统方案验证、调试环境构建、子系统联调联试、设计验证及测试的系统仿真平台。即以半实物仿真为基础,综合系统验证、系统测试、设备调试和快速原型等多种功能的硬件平台和软件环境。 目前,众多研发单位都在思索着如何应对航电设备研制工作日益复杂的情况。如何采取高效的工程技术手段,来保证系统验证的正确性和有效性,是航电设备系统工程的重要研究内容之一,FireBlade 系统仿真测试平台正是在这种大环境下应运而生的。 在航电设备研制工程中的定位设备可被认为是航电设备研制工程中的终端输出,其质量的高低直接关系到整个航电设备系统工程目标能否实现。在传统的系统验证过程中,地面综合测试是主要的验证手段,然而,它首先要求必须完成所有分系统的研制总装,才能进行综合测试。如果能够结合面向设备的仿真手段,则可以解决因部分设备未赶上研发进度导致综合测试时间延长的问题。在以往的开发周期中,面向设备的仿真技术并没有真正得到重视: (1)仿真技术的应用主要集中在单个测试对象上,并且缺乏对对象共性的重用; (2)仿真技术缺乏对复杂环境与测试对象的模拟; (3)仿真技术的应用缺乏系统性,比如各个阶段中仿真应用成果没有实现共享,
XXX软件系统系统监视平台详细设计文档
目录 1.文档说明 (3) 1.1编写目的 (3) 1.2读者对象 (3) 2.术语与参考 (3) 2.1术语解释 (3) 2.2参考资料 (4) 3.总体设计 (4) 4.系统功能设计 (4) 4.1监控平台系统功能 (4) 4.1.1组态 (4) 4.1.2管理 (48)
1. 文档说明 1.1 编写目的 设计一种基于面向对象的、图形界面组态方式的过程监控平台,重点分析和描述图形界面的设计、数据处理等技术。 1.2 读者对象 2. 术语与参考 2.1 术语解释 2.2 参考资料
3. 总体设计 过程监控平台采B/S结构体系,模块化的设计思想,通过组态对I/O处理、报警、趋势、报表等进行分配来平和和协调系统的负荷,全面支持RS232/485、OPCServer、OPC Client、ODBC、OLEDB、DDE、API等主流通信接口和数据交互技术,具有良好的继承性和扩充性能。 过程监控平台提供丰富的图形库和强大的图形编辑能力,采用标准的、人性化操作界面,符合通用的操作和显示习惯,画面具有良好的可观性和易操作性。 系统特点: ●图形化的交互方式 ●稳定的通信处理和数据交互 ●分布式的体系结构 ●面向对象的工程组态 ●灵活的系统扩展和高效的集成功能 ●良好的跨平台性能 数据流转图例:
4. 系统功能设计 系统以图元和图符对象作为基本图形元素,由系统使用者自由组态,来将窗口中的图形对象与实时(历史)数据库或设备等对象建立相关性连接,并设置相应的动画属性,由数据对象的实时采集结果进行驱动,实现图形动画效果,完成动画构件中所需的动画功能。 定义对象和建立动画连接的步骤: 1.建立工程项目,组织规划项目层次和画面布局; 2.定义检测点参数,根据检测点安装的端口号和实际界限情况,定义开关量、计算 量等; 3.使用开发系统画面作图工具制作画面; 4.在画面对象属性中设置动画连接,其中动画连接可以有状态量、数值量、填充量、 表达式脚本; 5.编译、调试项目文件,产生动画效果; 6.发布,嵌入其他系统,实现生产过程状态的实时监控。 4.1 监控平台系统功能 过程监控平台是面向对象、分布式B/S体系结构的HMI/SCADA监控系统,提供过程可视化、数据采集和生产环境监控等功能,系统涉及界面设计、菜单定义、图形渲染编辑、数据集成等基本功能。 监控平台功能主要包括以下几个方面: ●基础配置 ●图形界面组态 ●报警组态 ●趋势组态 ●事件管理
水声扩频通信中OFDM技术应用郭中源水声扩频通信中OFDM技术应用 郭中源陈岩陈庚贾宁 (中国科学院声学研究所) Application of OFDM in underwater acoustic spread spectrum communications Guozhongyuan, Chenyan, Chengeng and Jianing Institue of Acoustic, Chinese Academy of Science 1(引言 [1]OFDM的基本原理是将高速率的数据流分解成多路低速的数据流,然后在多个子载波上同时进行数据传输。由于数据被分解到多个低速的子载波上进行并行传输,所以数据符号持续时间变长,减少了由于多途时延弥散所引起的码间串扰的影响。 扩频通信的基本原理是将低速率的信息码(所占带宽相对较窄)用高速率的扩频码将其频带拓宽,这样信息码所包含的加性噪声,包括一些突发干扰的频谱同样受到扩频码拓宽,在接收端经过解扩和带通滤波(其带宽与信息码频带相应),就将通带外的噪声与干扰大部分滤除掉,其信息传输过程还是按扩频码的速率进行,也就是说传输码片的宽度接近于扩频码带宽的倒数。 因为扩频码是以较窄的扩频码片传输,所以当多途时延弥散超过码片宽度时,扩频码会受到码间串扰的影响。扩频通信是以降低传输率(在可用带宽一定时)来获取扩频增益,比较适合在远距离低速率的水 [2]声通信中传输信息。国外文献报导在深海(深度200m)通信距离达到500多公里。国内试验大多在浅海(深度70-80m),受海底影响要严重一些,有比较复杂
的多途结构。多途弥散是水声通信中造成码间串扰的主要原因。在这种情况下如果结合OFDM技术,系统性能会有一定的改善。 2(水声扩频通信中OFDM系统的应用和一些海试结果的比较 在扩频通信中,信息码与扩频码相乘之后经载频调制输入信道。如果载频调制之前将信号看作频域波形,进行串/并变换和IFFT变换,然后将各子带相加,再经过载波调制和峰值抑制输入信道,接收端将从信道输入的信号先进行载频解调,解调时要作多普勒补偿,然后作FFT运算,FFT输出分为虚实两个部分,经过序列归并后就可以进行解扩处理。解扩后的波形经相关解码输出信息。图3-图5为一组2005年1月南海海试数据处理结果。其中扩频结合OFDM信号载频3.2KHz,带宽约457Hz,扩频增益约100;扩频信号载频3.2kHz,扩频码为10阶Gold序列,所用带宽约914Hz,扩频增益约56。 图3a.扩频通信系统中利用OFDM技术在通信距离43km时的接收信号频谱 图3b.图3a信号的相关解码;相关系数=0.98 图4a扩频通信系统中利用OFDM技术在通信距离为73km时的接收信号频谱(已看不出频域信号) 图4b信号的相关解码输出;相关系数=0.769 图5a 43km扩频通信接收信号频谱载频。 图5b扩频通信相关解码结果。
3 基于GUI的《信号与系统实验》仿真平台的设计 设计思想 3.1.1 设计步骤 本课题设计的界面布局是先设计GUI总界面,然后设计子界面,再在子界面上设置按钮、坐标轴、文本框等一系列控件,最后借助于callback函数调用程序。在函数调用程序的设计中先编写各个子界面中的回调函数下的程序,再编写GUI界面的回调函数下的程序。 1. 用MATLAB的GUIDE提供的创建图形界面工具设计整个实验仿真界面的主界面,在设计子界面; 2. 在实验子界面中添加各个控件对象,编写控件按钮回调函数,实现每个控件的控制功能,直接通过界面上的控件实现对结果的分析; 3. 最后编写GUI总界面的回调函数程序,把所有的子界面集合在总界面中,通过总界面可以进入任意子界面中并可以进行操作; 4. 退出实验界面。 设计流程如图3-1: 3.1.2
验界面、快速傅里叶实验界面。在菜单设计时,在实验子界面中除了使用系统约定的 菜单条外,还增加了几个控制背景和退出实验的菜单。系统的整体结构如图3-2所示: 图3-2 实验系统的整体结构 基于的系统总界面的设计 3.2.1 设计步骤 在GUIDE 的编辑界面中,在空白处双击或者单机右键选择property inspector , 出现属性设置对话框,可以对GUI 的属性风格进行个性化。Color 选项可以改变背景 颜色,选择自己喜欢的颜色,本课题是插入图片。Position 选项可以对界面窗口的大小进行调整,窗口的大小可以通过设置width 和height 进行调整,也可以用鼠标拖拽窗口,用鼠标拖拽窗口设置比较方便、快捷,也更容易设置适合于实验设计内容的大 小GUI 界面。 下面详细介绍主界面的设计过程: 点击运行MATLAB 软件后,在软件界面中直接点击GUIDE 工具,选择Create New GUI 中的Blank GUI(Defarlt)点击OK ,在弹出的新建窗口中拖入7个静态文本框 (Statec Text )和7个按钮(Push Button )如图3-4所示。设置静态文本的String 为“基于GUI 的信号与系统仿真实验平台的设计”Background Color 为浅红色, FontSize 为,Foreground Color 位黑色。依次设置另外六个静态文本框String 为“实 验一基本信号的产生”、“实验二信号的基本运算”、“实验三卷积”、“实验四傅里叶变 换”、“实验五连续系统零状态响应”、“实验六低通滤波器”这几个实验的Fonsize 为, 另外的六个按钮依次设计的Fonsize 为。点击每个实验后的按钮编写回调函数进入相 应的实验子界面中,也可参考图3-3流程: 的产生。 基 本信号信号的 基卷积 傅立叶变连续系统 低通滤波 主界面 退出界
水声通信FSK调制系统性能仿真 钟方盛石亦敏张杰峰 一.仿真要求 仿真一下单发单收、FSK调制下得水下通信系统性能。 中心频率有两个:21~27KHz,带宽6KHz;55~65KHz,带宽10KHz; 信道:AWGN及单径Rayleigh衰落; 通信距离1Km、8Km; 通信速率:未定(通过仿真确定); 给出BER vsSNR 得曲线; 其她可以认为就是理想得; 二.带宽、码元速率与频率间隔分析 带宽;波特率;一共有个频率点,相邻频率间隔。 1、基带信号带宽与波特率 , 其中就是比特率,为滚降因子。取=1,则基带系统所需带宽 2、带宽与波特率、频率间隔 3、频率点设置 频段为,其中为最小频率,为最大频率,则中心频率为,带宽为。 设波特率为,那么相邻频率间隔为。 因此,可以设计频率点得值为 。 三.信道建模与最佳接收 1、信道建模 对于MFSK,经过单径Rayleigh衰落及AWGN噪声,可以将信号建模成 ,
其中服从参数为得瑞利分布,服从得均匀分布,高斯噪声,就是MFSK调制中得频点。 由于若X、Y相互独立且都服从,那么服从参数为得瑞利分布。因此,可以根据这个来设计瑞利分布。 2、最佳接收 经过理论推导,可以得到检测统计量,,对于都成立,则判为。 而这等价于都成立,这判为,其中 四.不同瑞利分布参数与速率下得BER-SNR仿真曲线 注: (1)以下曲线中,X坐标为SNR(dB),Y坐标为BER(误比特率,对数坐标);不同颜色代表不同有效比特速率,即经过1/2卷积码信道编码。 (2)在比特速率与SNR确定时,瑞利分布参数对BER有很大影响,越小信道越优良,误比特B ER越小。因此为了折衷考虑,选择=0、5来进行仿真。 1、中心频率21~27KHz,带宽6KHz (1)2FSK,瑞利分布参数=0、5, 有效比特率为0、4、0、6、0、8、1、0、1、2kbps (2)4FSK,瑞利分布参数=0、5, 有效比特率为0、8、1、2、1、6、2、0、2、4kbps
目录 1引言 (1) 1.1大运河监测预警系统指标的科学性分析 (2) 1.2系统建设目标 (7) 1.3 总体结构 (9) 2 监测系统设计 (15) 2.1 设计原则 (15) 2.2 监测方式及报汛工作体制 (16) 2.3 监测站网布设要求 (17) 2.4 监测设备设施设计要求 (19) 2.5 信息传输通信网设计 (23) 2.6 测站设备设施配置及投资控制 (33) 3 信息汇集与预警平台设计 (43) 3.1 设计原则 (43) 3.2 平台组成与功能要求 (43) 3.3 计算机网络系统设计 (44) 3.4 数据库系统设计 (46) 3. 5 平台设备配置与投资控制 (48) 4 信息汇集、信息查询子系统设计 (50) 4.1 设计原则 (50) 4.2 信息汇集子系统设计 (51) 4.3 信息查询子系统设计 (52) 4.4 子系统建设投资控制 (56) 5 预报决策子系统设计 (57) 5.1 设计原则 (57) 5.2 系统组成 (58) 5.3 分析预测模块 (58) 5.4 预警信息生成模块 (60) 5.5 系统维护和管理模块 (62) 5.6 子系统软件开发投资控制 (63) 6 预警子系统设计 (65) 6.1 设计原则 (65) 6.2 预警子系统的组成 (66) 6.3 预警流程 (67) 6.4 预警信息的发布 (68) 6.5 预警信息传输通信网 (70)
1引言 中国大运河是一个活态线性遗产,我国于2006年12月正式启动中国大运河申报世界文化遗产工作。申遗对大运河的保护管理提出了很高的要求。按照国际相关标准和要求,必须建立起科学完善的遗产管理监测预警系统,组织开展大运河遗产的日常监测管理、数据收集与著录、应急突发事件处置等工作,及时解决和排除工作中存在的问题和隐患。为了提升遗产的保护管理水平,提高灾害防治、风险防范的能力,使大运河遗产的价值、真实性和完整性不受侵害,确保遗产的可持续保存和利用。2011年4月,国家文物局发文要求扬州率先建设大运河监测预警系统,该项目分为两期实施,目前都已通过验收,进入实际运行阶段。在这过程中,系统监测预警指标的科学制定,对系统的顺利运行起到了关键作用,本系统共计完成监测指标26个大项上百个小项,涵盖了本体、环境要素、保障体系三大类别的指标,构成了一套完整的监测预警指标,对大运河遗产的科学管理、合理开发及可持续发展起到极其重要的作用。 大运河(浙江段)保护管理监测平台,采用先进的信息技术手段,基于四有工作内容为基础,对文化遗产所在地的商务体系、日常办公体系、行政管理体系、安全监控体系、生态监控及保护体系、数据统计及分析体系进行整合,将物质文化遗产的各类资料(如外观、体积、质地、材料、年代、产地、现存地、历史、背景故事等)进行数字化。并运用遥感、遥测、GPS全球定位、地理信息系统、仿真-虚拟等技术,将非物质文化遗产如景区、公园、博物馆、城区、街道等的地理、资源、环境、基础设施、游客流量、等复杂系统进
智能交通仿真平台的设计与实现 发表时间:2018-05-16T16:47:29.383Z 来源:《基层建设》2018年第3期作者:扈高云 [导读] 摘要:智能交通仿真系统是在各种先进的定位技术和通信技术等为基础下实现的一种交通仿真平台,该系统通过各种先进的设备的对车辆的定位、停车、收费等个方面进行系统的管理,逐渐形成一个完善的智能交通系统。为此,本文就智能交通仿真平台的设计进行了系统的分析,并且提出了有效地措施推动了智能交通仿真平台的进一步实现。 身份证号码:4305211991****6624 广东佛山 528000 摘要:智能交通仿真系统是在各种先进的定位技术和通信技术等为基础下实现的一种交通仿真平台,该系统通过各种先进的设备的对车辆的定位、停车、收费等个方面进行系统的管理,逐渐形成一个完善的智能交通系统。为此,本文就智能交通仿真平台的设计进行了系统的分析,并且提出了有效地措施推动了智能交通仿真平台的进一步实现。 关键词:智能交通;仿真平台;基础设施 引言:智能交通系统的实现需要的坚实的基础提供重要的保证,其中主要有完善的基础设施建设,监控系统、定位系统等了,并且利用目前先进的信息技术、控制技术、传输系统等,对路面上的运输进行全面的了解和控制,从而在实际情况下制定高效、精确、完善、合理的智能交通仿真系统,推动我国经济的持续发展。但是在实际的工作中,为了更好地实现智能交通仿真平台的设计和实现,需要相关部门从以下几个方面进行考虑。首先,相关部门可以尝试着引功用各种的智能交通的模式,并且在RFID定位技术的支持下,探索智能交通仿真平台的设计和实现。其次,尝试着将智能交通仿真系统应用与集成定位、交通信号灯的控制管理、车辆的运行和停放等各个模块[1]。最后,选择合适的体体验者投入到智能交通仿真系统的运行中,让体验着感受到该系统在运行中的优缺点,研究人员还应该积极的将各种先进的高科技技术的应用到系统的运行中,加深体验者对智能交通仿真系统的认识,从而不断的探索智能交通仿真系统的发展趋势。 1 智能交通仿真系统的相关概述 我国研究智能仿真系统的设计和实现的时间较短、理论依据等不充分,较西方发达国家来说,还存在很大的差异,就以欧洲、日本来说,这些国家的智能仿真系统已经在不断的研究中取得了较大的成果,并且开始致力于研究的更高层次的ITS系统。尤其是在美国,该国家TIS技术已经逐渐趋于成熟,并且已经从原来的汽车研究、道路研究逐渐转变为一切交通工具和交通系统的运行和研究中,并且致力于建立的完善的车辆运行管理系统、交通信号灯控制系统、车辆收费系统等多个电子系统。智能交通仿真系统在欧洲的使用情况来看,相关部门应该将的其应用与城市的发展规划和安全系统规划当中。 各国想要实现智能交通仿真平台,需要相应的技术支持,其中做重要的就是定位系统。因为在实施智能交通仿真平台的时候,需要动态的监测车辆的运行情况和运行的位置,然后才能够及时的了解周边的实际环境,制定切实可行的交通管理计划。而美国的全球定位技术和欧洲的卫星定位技术为智能交通仿真平台的设计和实现提供了重要的技术支持。 2 智能交通仿真平台的系统的设计 交通仿真系统的设计需要在各方面的技术支持下才能够得到科学的设计和规划,这个系统的主要功能是实现模型车辆的控制和管理等,缓解我国的交通压力,推动我国交通运输业的不断发展。 2.1 定位技术 技术人员需要在城市道路、公路、停车地点安装相应的的定位芯片,并且为这些定位芯片进行科学的编号结合分组,然后将这些芯片收集到的信息整理到一个数据库中,如果车辆中安装有读卡装置,当经过这些路段的时候系统就会自动的收集带车辆运行中的各种信息,然后将这信息反馈到的中央控制中心,从而获得车辆的动态定位信息[2]。 2.2 控制技术 在智能交通仿真平台的设计工作中通常会使用到各种模拟的车辆,而这些车辆需要有方向盘、刹车、档位等重要装置。当模拟人们在模拟驾驶车辆的时候,可以将车辆中的各种操作动作自动的转变化为相应的数据信息,并且这些信息会被车辆中的主控制系统收集和整理,然后在先进技术和软件的支持下进行数字化,这些信息会反馈到的模拟车辆的中心控制系统,促使车辆自动的依据下达指令,调整运行的速度、方向、档位等。 2.3 动态诱导技术 模型车辆的诱导功能可以分为两种情况,一种是车辆的动态运行诱导功能,一种是车辆的停车诱导功能。通常情况下,模型车辆的运行诱导功能需要及时的了解车辆运行的目的地以及当前的道路的实际情况,然后在通过一定的诱导计算,系统能够自动的为的车辆选择更加科学、合理的运行途径,从而实现车辆的动态运行诱导功能。而模型车辆的停车诱导则需要的在芯片数据库的帮助下实现,也就是说依据安装的的定位芯片来了解车辆所处位置的实际情况,例如:停车收费站、共同通车站等,从而诱导模型车辆选择合适的停车地点。 3 智能交通仿真平台的系统的实现 智能交通仿真平台的实现需要的通信技术和定位技术的共同支持,在整个系统的实现不仅需要车辆的定位系统的准确性,还需要系统的快捷、稳定的通信模块,然后在先进科学技术的支持下实现智能交通仿真系统的实现。 3.1 通信服务系统 智能交通仿真系统的是通过电子信息技术将各种数据库和传输装置相联系,从而实现各个子系统的连接。但是在实际的模型车辆中需要应用到各种通信接口,从而实现车辆运行中各种数据的收集、整理、分析。并且通信服务系统在实际的应用过程中还被分为以下两种模块。 一方面是的串口通信模块,这种通信模块通常是在各种先进及时的支持下运行的,其中主要是Net Framework2.0中的Serial Port类实现的串口通信模块。而Serial由依据自身的特性和功能被划分为,模型车辆驾驶控制中心的串口通信和模型车辆驾驶中的状态反馈串口通信这两种。通过这两个方面的共同合作,不仅能够有效的收集模型车辆在运行中发出的各种信号,并且在软件的支持下将控制信号转化成状态信号,然后整理到储存器中进行。还能够将的模型车辆驾驶舱发出的各种控制信进行采集,将采集到的控制信号储存在控制信号储存中。 另一方面是TCP通信模块,这种通信模块的运行和实现需要通过专业人员的编程,然后在Net Framework2.0中的Serial Port类的帮助下安装相应的软件和装置,从而对智能交通仿真系统运行和实现提供坚实的基础。并且,研究人员还将TCPCtient类进行仔细的研究,衍生
0 引言 通信技术的发展主要集中在空间通信上。近年来,由于军事和海洋开发的要求,人们开始越来越重视水下通信系统的研究与开发。由于电磁波在水中传播时衰减严重,而声波是人类迄今为止已知的唯一能在水中远距离传播的能量形式,所以海洋中检测、通信、定位和导航主要利用声波。声波是目前水中信息传输的主要载体。因此,人们对水下通信的研究主要集中在对水声通信的研究之上。 水声通信是当前唯一可在水下进行远程信息传输的通信形式,由于其在民用和军事上都有重大意义,水声通信一直被人们所重视。文章介绍了水声通信的特点、系统组成、发展历史和国内外的发展现状。 1 水声通信的历史 水声通信的历史可以追溯到1914 年,在这一年水声电报系统研制成功可以看作是水下无线通信的雏形。世界上第一个具有实际意义的水声通信系统是美国海军水声实验室于1945 年研制的水下电话,该系统使用单边带调制技术,载波频率8.33 kHz,主要用于潜艇之间的通信。早期的水声通信多使用模拟频率调制技术。如在50 年代末研制的调频水声通信系统,使用20kHz 的载波和500Hz 的带宽,实现了水底到水面船只的通信。模拟调制系统不能减轻由于水声信道的衰落所引起的畸变,限制了系统性能的提高。 70 年代以来随着电子技术和信息科学突飞猛进的发展,水声通信技术也因此得到了迅速的发展,新一代的水声通信系统也开始采用数字调制技术。采用数字技术的重要性在于,首先,它可以利用纠错编码技术来提高数据传输的可靠性;其次,它能够对在时域(多途)和频域(多普勒扩展)上的信道畸变进行各种补偿。随着处理器技术的提高,各种采用快速解调的算法也随之发展起来。数字调制技术的主流为幅移键控(ASK)、频移键控(FSK)和相移键控调制(PSK)。 随着用于空间无线电衰落信道技术的发展,水声通信的下一代系统对数字编码的数据采用了频移键控(FSK)调制方式。作为一种能量检测(非相干)而不是相位检测(相干)算法,FSK 系统被认为对于信道的时间和频率扩展具有固有的稳健特性。采用数字技术有两个方面的好处:首先,它允许采用纠错编码技术来提高传输的可靠性;第二,它允许对信道混响做一定的补偿,包括时间和频率上的补
桥梁监测云平台建设设计方案
目录 1.建设背景 (3) 2.建设目标 (3) 3.建设原则 (4) 4.监测需求 (4) 5.使用技术介绍 (7) 5.1.弹性计算ECS (7) 5.1.1.弹性扩张 (7) 5.1.2.弹性收缩 (8) 5.1.3.弹性自愈 (9) 5.2.云数据库RDS (9) 5.2.1.相关服务 (10) 5.3.云数据库Redis版 (10) 5.4.云HBase X-Pack (11) 5.4.1.HBase产品介绍 (11) 5.4.2.Hbase产品生态 (12) 5.4.3.HBase产品架构 (12) 5.4.4.X-Pack Spark介绍 (13) 6.建设框架 (14) 6.1.总体方案 (14) 6.2.逻辑架构 (14) 6.2.1.数据采集架构 (14)
6.2.2.系统业务架构 (15) 7.建设方案 (17) 7.1.接入10座以内桥梁 (17) 7.2.接入50座以内桥梁 (19) 7.3.接入50座以上桥梁 (21) 7.4.设备数据采集方案 (23) 7.5.数据传输信息安全方案 (25) 8.建设内容 (27) 8.1.系统描述 (27) 8.1.1.系统功能模块列表 (27) 8.1.2.核心模块介绍 (28) 8.2.详细功能简介 (29) 8.2.1.大屏展示 (29) 8.2.2.系统首页 (29) 8.2.3.系统管理 (30) 8.2.4.基础数据维护 (33) 8.2.5.监控中心 (36) 8.2.6.数据统计 (38) 8.2.7.告警中心 (39) 8.2.8.评估报告 (41)
华中科技大学 硕士学位论文 网络路由仿真平台的设计与实现 姓名:朱佳 申请学位级别:硕士 专业:通信与信息系统 指导教师:石坚 20070604
摘要 随着通信技术和高速网络技术的发展,网络上的多媒体应用对网络信息传输提出了更高的要求,路由技术的研究也越来越深入。由于路由算法是路由技术的核心,因而研究人员投入了大量的精力在这方面,不断发展和提出了各种新的路由算法。如何对这些路由算法进行性能评价是一个值得大力研究的课题。 本文开发了一个实用的、开放性强的、界面友好的、集仿真过程与图形显示数据分析于一体的网络路由仿真平台RSP。该平台可随机产生有线网络拓扑图、蜂窝移动网络拓扑图、Ad Hoc网络拓扑图,由用户选择或添加被测试的路由算法,根据仿真执行过程中记录下的参数有效的测试和比较路由算法的性能。 本文主要工作如下: (1)根据有线网络的空间分布特性,实现了基于人口密度的有线网络节点分布建模。 (2)根据蜂窝移动网络的空间分布特性,采用遗传算法解决了无线基站的选址优化问题。 (3)根据Ad Hoc网络的节点运动特性,分析了节点的移动模型,实现了参考点组移动模型。 (4)根据实际网络的链路连接特性,分析了Waxman和Doar这两种随机链路生成算法,并采用Doar算法实现了随机链路的生成。 (5)对源路由算法和分布式路由算法的性能评价度量进行了分析,确定了算法性能评价的主要性能指标。 (6)设计了路由算法接口,实现了开放式路由仿真,用户只需按照路由算法接口的标准编写路由算法程序,网络路由仿真平台就可以动态加载该路由算法程序。 关键词:路由仿真有线网络蜂窝移动网络Ad Hoc网络网络链路