基于MEMS的GPS/SINS组合导航技术发展现状
康岳林1高杨2高立2
(1. 海军91630部队,广州 510320;2. 海军工程大学,武汉430033)
摘要:对比了GPS、捷联式惯导系统、微电子机械系统(MEMS)惯性传感器各自的优缺点。针对目前
以惯性技术为基础的组合导航系统得到了重视和发展,介绍了基于MEMS的GPS/捷联式惯导组合过程中存
在的各种技术问题和解决这些技术难题的技术途径。
关键词:MEMS GPS/SINS 组合导航
中图分类号:TP273 文献标示码:A 文章编号:1003-4862 (2011) 05-0026-04
Trends of GPS/SINS Integrated Navigation System Based on MEMS
Kang Yuelin1, Gao Yang2, Gao Li2
(1.Troop 91630,Guangzhou 510320,China; 2. Naval University of Engineering, Wuhan 430033, China)
Abstract:This paper compares the excellences and shortcomings of GPS, strap down inertial guidance system and micro electro mechanical system (MEMS). Being aimed at integrated navigation system based on inertial technology, it gives various technical problems and solutions in the combination of strap down system based on MEMS and GPS navigation system.
Key words: micro electro mechanical system (MEMS); GPS/SINS; integrated navigation
1 引言
提高导航系统精度的方法通常有三种:(1)提高单个系统(如捷联式惯导系统,Strap-down Inertial Navigation System,简称SINS)的精度,但这要受到材料、技术、工艺、器件和成本等软、硬件条件的限制;(2)采用各种滤波技术将两个或多个导航系统相组合,充分利用各导航系统的冗余量测信息进行互补,构成最优组合导航系统[1]。
(3)采用一种能精确地修正系统误差的辅助手段(例如GPS)对主导航仪器进行修正的修正方法。随着航空、航天、军事等应用对导航系统的高动态、抗干扰等性能要求的提升,鉴于GPS和SINS 各自的明显优点和缺点的互补特性,GPS/SINS 组合导航系统受到广泛关注。
组成SINS的惯性传感器普遍比较昂贵,限制了其应用范围。随着MEMS技术的不断进步,基于MEMS技术的惯性传感器性能不断提升,当前MEMS惯性传感器的性能已达到中等精度,能满足航空、航天、军事等领域的使用要求。由于MEMS惯性传感器采用集成电路的加工工艺制造而成,能够大批量生产,因此成本很低,而且体积很小,尤其适合构建微型、低成本的GPS/SINS 组合导航系统,在民用和军用领域具有广阔的应用前景[1-4]。
本文主要讨论了基于MEMS惯性传感器的GPS/SINS组合导航系统组合过程中存在的技术问题和解决这些技术难题的技术途径。
2 GPS/SINS组合的优点
GPS是美国国防部从70年代开始发展的以卫星为基础的无线电通讯导航系统,它是根据接收到的卫星信号解算出航行器的位置和速度,其误差是有界的,具有很好的长期稳定性,具有在海、陆、空全方位实时三维导航和定位能力[2,8]。但GPS存在诸多缺陷:(1)GPS系统直接由美国国防部控制,使用权受制于人[8],除美国国防部特许用户外,所有用户只能使用C/A码,美国政
收稿日期:2010-11-02
作者简介:康岳林(1985-),男,助理工程师,专业方向:导航制导与控制。
26
府对GPS工作卫星播发的信息采取所谓的选择可用性措施(SA),人为地降低卫星轨道参数精度,是不能绝对依赖的系统;(2)GPS易受地形地物的影响而导致定位中断。然而由于GPS导航定位的全球性和高精度,将其作为导航系统的一种辅助导航设备自然是一种比较理想的选择。
捷联惯性系统具有精度高、自主性强、隐蔽性好、结构简单、可靠性好、体积小、重量轻、成本低、容易维修等特点,但捷联系统中的惯性器件直接与载体联接,载体的恶劣动力学环境如过载冲击、振动以及机动飞行等都会给惯性器件和捷联系统带来动态误差。这类误差比较难以补偿,这也是捷联系统还没有达到平台系统精度水平的主要原因[1]。由于精度尚未达到平台系统的精度水平,且定位误差随时间而积累,所以其应用范围受到了一定程度的限制。
GPS/SINS组合导航系统是组合式惯性导航系统中的一种重要类型。GPS/SINS组合导航系统可以充分发挥GPS高精度和SINS自主性强的优势、取长补短[5]。用GPS接收机的高精度定位信息通过组合滤波器来标定和补偿捷联系统的积累误差,提高导航精度[6]。同时,利用捷联系统的速度和加速度信息对GPS接收机进行速度辅助,以提高GPS接收机的抗干扰能力和动态性能,即使在GPS接收机测量数据短时间出现故障或消失,捷联惯性导航系统仍能独立工作并提供高精度的导航数据。这是一个最佳组合方案,其性能、成本和体积均能满足各种运载器的导航技术要求。
3 MEMS的发展进展
MEMS(Micro Electro Mechanical System)即微机电系统,是指可以批量制造的,集微型结构、微型传感器、微型执行器以及信号处理电路、接口、通讯和电源于一体的微型器件或系统[1]。它以硅半导体材料为加工对象,采取专用集成电路制造技术把功能强大、复杂可靠的系统置于一个小小的硅片上,从而极大地拓宽了其设计及运用空间。它具有传统SINS所无法比拟的优点:尺寸小、重量轻、成本低、功耗小、寿命长、可靠性高、动态范围宽、响应速度快和便于安装调试等。自上世纪80年代MEMS概念被提出以来,MEMS技术在汽车工业、生物医学、航空航天等领域得到了广泛应用。我国从20世纪80年代末开始了MEMS技术的研究,在MEMS惯性器件方面开展了大量的研究工作,取得了长足的进步。国内公开发表的文献表明,我国研制的振动轮式MEMS陀螺零偏稳定性达到70°/h,随机游走噪声达到0.01°/s。但与国外发达国家相比还有一定的差距,主要体现在批量生产时性能的稳定性、器件的完好率都有待提高。
随着MEMS技术的不断发展,微型惯性导航器件体积越来越小,精度越来越高。这就使得加速度计和陀螺仪安装在载体上变得简单易行,从而使GPS/SINS组合导航系统的可行性大大提高。MEMS技术尤其适合构建微型、低成本的GPS/SINS组合导航系统,在民用和军用领域具有广阔的应用前景。目前MEMS技术已经进入了全面发展的阶段,一些著名实验室、公司采用MEMS技术,研制出多种微传感器与微执行器。
4 基于MEMS的GPS/SINS组合导航技
术
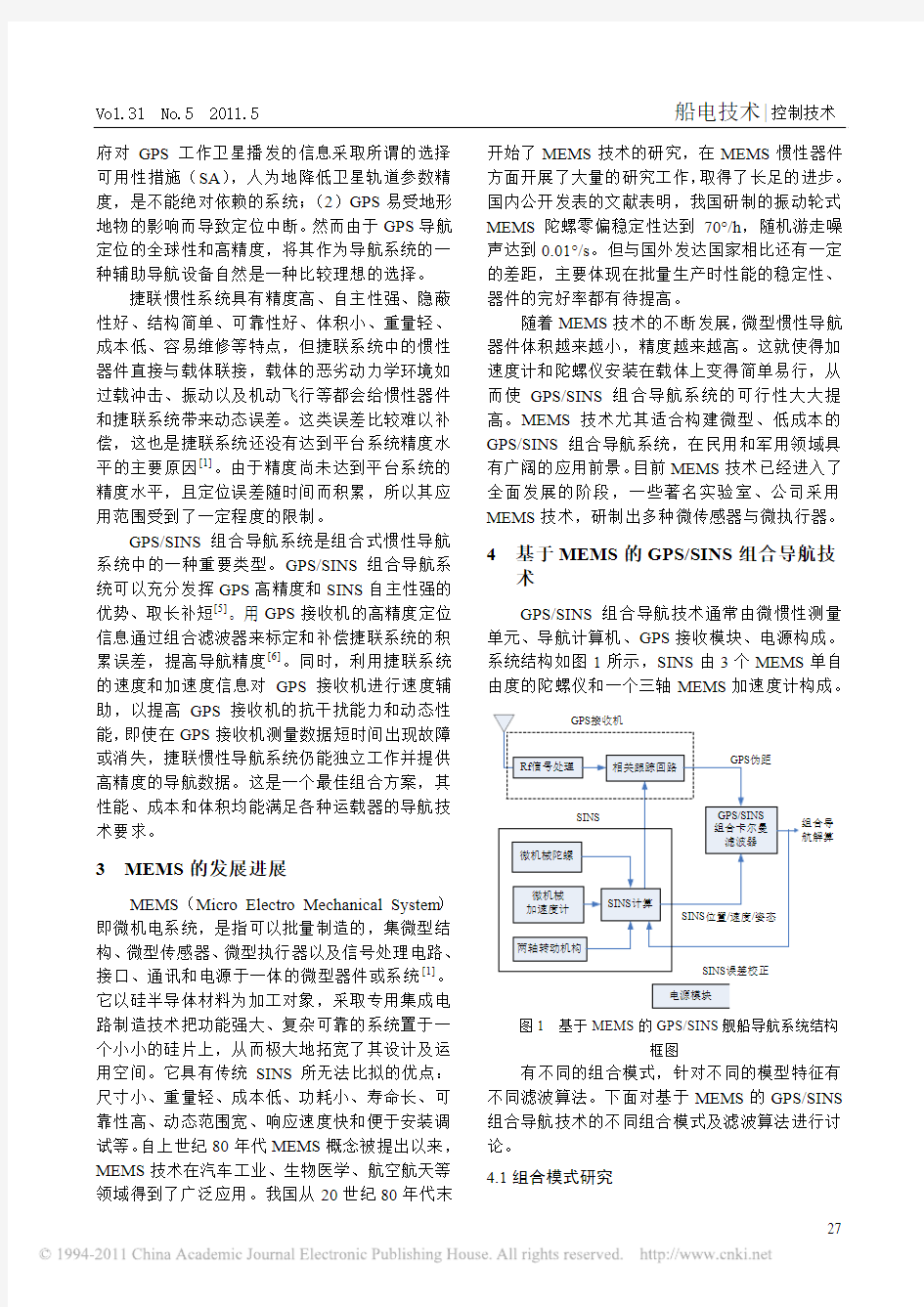
GPS/SINS组合导航技术通常由微惯性测量单元、导航计算机、GPS接收模块、电源构成。系统结构如图1所示,SINS由3个MEMS单自由度的陀螺仪和一个三轴MEMS加速度计构成。
图1 基于MEMS的GPS/SINS舰船导航系统结构
框图
有不同的组合模式,针对不同的模型特征有不同滤波算法。下面对基于MEMS的GPS/SINS 组合导航技术的不同组合模式及滤波算法进行讨论。
4.1组合模式研究
27
4.1.1松组合[1]
松组合(Loose Intergration)是在位置、速度或者姿态级别上的组合,它的组合工作方式主要体现在GPS对SINS的辅助。
位置/速度组合模式(也称松组合模式)的优点在于:工程实现容易;组合系统的计算量小,可以满足对实时性要求较高的系统设计;两个系统仍然保持独立工作,即使某个系统出现故障时,组合系统仍然可以继续工作,保证了系统的连续性。其缺点在于:要求可见卫星数目不少于4颗;GPS给出的位置和速度信息是时间相关的,导致滤波器的稳定性较差。对于这种组合模式,国内外研究的都比较多,理论已经比较成熟,已经常见于工程应用。
4.1.2紧组合[1]
紧组合(Tight Intergration)方式是在伪距、伪距率、多普勒或载波频率级别上的耦合,它的滤波器构型能够消除有GPS接收机Kalman滤波器导致的未建模误差,达到本质上提高导航精度的目的。
在紧组合模式下,GPS接收机和基于MEMS 的SINS相互辅助。为了实现相互辅助作用,通常将MEMS惯性器件和GPS接收机进行一体化设计。紧组合模式通常使用GPS的伪距和伪距率信息,以及用基于MEMS的SINS的位置和速度信息辅助GPS接收机内部的码/载波跟踪回路,来提高GPS 接收机的抗干扰能力和动态跟踪能力[8]。伪距/伪距率组合模式的优点在于:无量测输入相关问题,组合系统的导航精度高;在可见卫星少于4颗的情况下,也能在较短的时间内正常工作。其缺点在于:需要进行繁琐的星历计算和延迟误差补偿,计算量较大,对导航计算机要求较高,实时导航性能降低了;需要严格的时间同步设计;要求GPS 接收机能够给出伪距、伪距率和卫星星历等原始测量数据。
4.1.3 超紧组合[11]
不同于松组合和紧组合导航系统传统意义上的滤波器设计方法,超紧组合(Ultra tight Coupling)技术,也称深度组合(Deep Intergration)[10],它更侧重SINS对GPS接收环路的辅助,是一种GPS接收机和MEMS传感器在同相和正交相位信号级别上深度组合的处理方法。可有效提高接收机在弱信号、高动态、有意或无意射频干扰环境下的性能。4.2 滤波算法研究
Kalman滤波器作为一种最优的估计工具,已经在组合导航中获得了广泛使用。低成本基于MEMS的GPS/SINS组合导航系统也多以经典Kalman滤波器为数据融合手段。同时针对经典Kalman滤波器的不足,发展了一系列改进的Kalman滤波方法。
4.2.1 H∞滤波[1]
从数学角度分析,卡尔曼滤波方法建立在最小均方误差为估计的准则基础上,要求确切已知外部干扰信号的统计特性以及系统的动力学模型,正是因为标准卡尔曼滤波方法缺乏鲁棒性,在很大程度上限制了卡尔曼滤波算法的应用和发展。H∞滤波是将鲁棒控制设计中引入的性能指标H∞范数应用于滤波,以解决系统存在的各种不确定性问题。它将噪声和不确定输入看作是能量有限的随机信号,使系统的干扰到估计误差的闭环传递函数的H∞范数小于给定的正数,因此它对系统模型不确定误差和不确定性噪声均具有很好的鲁棒性。
4.2.2 降阶卡尔曼滤波模型和闭环修正卡尔曼滤波模型[2]
GPS/SINS的状态方程定义为捷联惯性导航系统的误差模型,在不考虑高度通道的前提下(例如对于地面导航、海面舰艇导航),共有7维(即:三维姿态误差、二维速度误差、二维位置误差),而对于空中导航,共有9维。降阶卡尔曼滤波模型中将位置、速度状态都简化为二维的,考虑对惯导系统进行修正,闭环修正卡尔曼滤波模型加入控制项U(k-1)。组合后系统的位置、速度误差和俯仰、横滚方向由于状态方程中航向信息的可观测性较弱(静态条件下和地球自转角速率的北向分量耦合),姿态误差均收敛。所以经卡尔曼滤波修正后,航向角误差虽有所改善,但仍有发散的趋势,其缓急与方位轴向陀螺的漂移大小有关。
4.2.3 自适应UKF滤波算法[7]
对GPS/SINS组合导航系统,考虑系统的强非线性,一般采用扩展卡尔曼滤波(EKF)方法。在实际应用时,EKF依赖于模型的准确性和线性化截断误差,滤波性能不佳。Julier提出的UKF (Unscented Kalman Filter) 滤波方法,以确定性采样的策略,通过Unscented变换,用能够完全表述密度函数的均值和方差的有限个样本点,来表述
28
状态的概率密度分布,可以解决上述难题。通过UKF的非线性函数,可以得到与EKF三阶泰勒级数展开式相当的均值和方差,因而UKF具有优于EKF的滤波性能。
5 工程实现
前面提到,GPS/SINS组合导航系统通常由四部分组成,DSP等高速数字信号处理器的出现,系统的滤波解算通常由DSP等来完成。辅助处理电路通常由FPGA来完成。
国内的研究机构在系统实现、组合算法和算法的软件实现等方面做了大量工作,并且模型样机在实验室里经过测试,组合后系统解算出来的位置、速度误差和姿态角均达到了较好的精度。如南京航空航天大学导航研究中心的李荣冰等采用ADXRS150 型号的MEMS陀螺以及ADXL320型号的MEMS加速度计构成了微型惯性测量单元,同时采用μ-Blox GPS接收机,利用DSP组成了微型组合导航系统。此系统与姿态稳定和飞行控制系统一起,构成微型飞行器闭环系统,以实现微型飞行器的自主飞行。经过多次试飞试验后,此GPS/MEM-SINS已成功应用于微型飞行器[1]。
国外,2004年2月,Georgia Tech(乔治亚理工学院),MIT(麻省理工学院)等研究单位合作开发的导航系统,处理器板采用最优的1.3G FLOPS(浮点操作每秒)快速浮点处理器;传感器板由数字逻辑和传感器组成,数字逻辑由Altera 的芯片FPGA实现软核CPU、5路串行口、一路SPI 口以及其它用户逻辑组成;传感器部分包括3个MEMS速率陀螺、4个+/-10 g的MEMS加速度计和4Hz数据输出率的GPS接收机。该导航系统性能指标如下:导航参数输出是100 Hz;板尺寸如信用卡大小,为55 mm×85 mm;系统尺寸为宽60 mm;长90 mm,高32 mm;系统重量仅为120 g[12]。
6 结束语
基于MEMS技术的SINS和GPS构成的组合导航系统,不仅结合了GPS的定位精度高和误差无积累的特点,还结合了惯性导航的自主性和实时性的优点,而且使导航系统的成本下降,可靠性增加,精度得到提高。
从GPS/SINS的松组合配置方式、紧组合配置方式到建立降阶卡尔曼滤波模型、闭环修正卡尔曼滤波模型等,系统的组合精度不断提高。上述性能的提升是以牺牲系统复杂性、冗余度、GPS 和SINS的独立性为代价。组合导航系统的设计
仍然需要考虑诸多因素的折中,这些因素包括:
设计和运行成本,体积、重量、功耗、接口等安
装限制,应用环境和需求、系统的可靠性、完整
性和连续性、可升级扩展等性能[9]。
参考文献:
[1]安亮, 王可东. GPS与MEMS-IMU组合导航技术发
展现状[J]. 全球定位系统, 2008, (3): 50-54.
[2]林雪原, 谭学者. GPS/SINS组合导航系统与实现[J].
计算机测量与控制, 2007, 15(12):1798-1800.
[3]祝燕华, 蔡体菁, 杨卓鹏. MEMS-IMU/GPS组合导
航系统与实现[J]. 中国惯性技术学报, 2009, 17(5):
552-555.
[4]马建仓, 陈静. MEMS SINS-GPS组合导航系统设计
[J]. 传感技术学报, 2009, 22(10): 1437-1440.
[5]祝彬. 惯性制导系统的发展[J]. 中国航天, 2010(1):
36-39.
[6]何广军, 李宝全, 马计房. SINS/GPS组合导航的半
实物仿真实验系统设计[J]. 计算机仿真, 2006, 23(7):
268-271.
[7]皮运生, 施国梁. 低成本GPS/SINS组合导航系统的
设计及实施方案[J]. 微计算机信息, 2008, 24(32):
22-24.
[8]彭允祥. 捷联惯导与导航卫星组合技术的发展趋势
[J]. 导弹与航天运载技术, 1999, 4: 58-62.
[9]何晓峰, 胡小平. 基于SINS/GPS组合的低成本船用
姿态确定系统[J]. 中国惯性技术学报, 2004, 12(5):
21-25.
[10]Kourepenis A, Connelly J , Sitomer J. Low cost
MEMS inertial measurement unit[A]. IONNTM 2004[C]. Jan26-28, 2004, California, USA.
[11]JauHsiung Wang. Intelligent MEMS INS/GPS
integration for land vehicle navigation [D]. Canada:
University of Calgary, 2006.
[12]Gebre Egziabher D, Gabriel H. A. Gyro-free
quaternion-based attitude determination system suitable for implementation using low cost sensors[C].
IEEE Position Location and Navigation Symposium,
2000, 1852192.
29
MEMS技术发展综述 施奕帆04209720 (东南大学信息科学与工程学院) 摘要:对于MEMS技术进行简要的介绍,了解其诞生与发展,所涉及的学科领域,目前的研究成果以及在生活、军事、医学等方面的应用。目前MEMS在我国的发展已取得一定成果,在21世纪可以有更大的突破,其未来在材料、工艺、微器件、微系统方面也具有巨大的发展空间。 关键词:MEMS、传感器、微制造技术 一、MEMS简介 微机电系统(micro electro mechanical system,MEMS)是在微电子技术基础上发展起来的多学科交叉的前沿研究领域,其起源可以追溯到20世纪50~60年代,最初贝尔实验室发现了硅和锗的压阻效应,从而导致了硅基MEMS传感器的诞生和发展。在随后的几十年里,MEMS得到了飞速发展,1987年美国加州大学伯克利分校研制出转子直径为60~120/μm的硅微型静电电机;1987~1988年,一系列关于微机械和微动力学的学术会议召开,所以20世纪80年代后期微机电系统一词就渐渐成为一个世界性的学术用语,MEMS技术的研究开发也成为一个热点,引起了世界各国科学界、产业界和政府部门的高度重视,经过几十年的发展,它已
成为世界瞩目的重大科技领域之一。 二、MEMS涉及领域及作用 MEMS技术涉及电子工程、机械工程、材料工程、物理学、化学以及生物医学等学科。MEMS开辟了一个新的技术领域,它的研究不仅涉及元件和系统的设计、材料、制造、测试、控制、集成、能源以及与外界的联接等许多方面,还涉及微电子学、微机构学、微动力学、微流体学、微热力学、微摩擦学、微光学、材料学、物理学、化学、生物学等基础理论 三、MEMS器件的分类及功能 目前,MEMS技术几乎可以应用于所有的行业领域,而它与不同的技术结合,往往会产生一种新型的MEMS器件。根据目前的研究情况,除了进行信号处理的集成电路部件以外,MEMS内部包含的单元主要有以下几大类: (1)微传感器: 主要包括机械类、磁学类、热学类、化学类、生物学类等。其主要功能是检测应变、加速度、速度、角速度(陀螺)、压力、流量、气体成分、湿度、pH值和离子浓度等数值,可应用于汽车、航天和石油勘探等行业。
北斗导航技术在现代农业中的应用李亚栋 摘要:文章介绍了我国自主研发的北斗导航技术的发展的优势。对于发展这一系统的建设对我们国家在卫星导航领域的主导地位、推动经济和社会科学发展具有关键性作用。在推动北斗二代导航系的技术革新后,应用到现代军事信息化局部战争中具有一些重要的战略意义。 关键词:北斗导航;经济效益;军事应用 1卫星导航系统在世界各国中的发展趋势 1.1卫星导航系统建设由“一家独霸”向“多家竞争”转变 从世界范围看,美国率先构建GPS全球卫星导航系统进行深度开发应用,目前拥有最先进的技术,仍在持续推进现代化改造,引领卫星导航发展方向;俄罗斯不甘落后,随着国内经济逐步复苏,把加快GLONASS(格罗纳斯)能力建设作为一项重要战略任务,以重塑军事大国形象;欧盟克服内外部重重困难,全力推进Galileo(伽利略)系 统建设,为其.战略利益提供服务;印度、日本谋求摆脱受制于人的局面,相继发展自主区域卫星导航系统;我国也对北斗长远发展做出了筹划部署,2020年左右将建成全球卫星导航系统。这种发展态势,动摇了美国GPS的霸主地位,引发了世界范围内卫星导航系统建设的激烈竞争,已逐步呈现出你追我赶之势。 1.2卫星航系统性能由单一、概略向多元、精准转变 卫星导航系统是随着科技进步和产业发展不断拓展完善的。各国卫星导航系统建设实践表明,技术决定系统发展,不同技术阶段只能建成相应水平的系统,无论哪个国家都要经历一个由低级向高级逐步推进的过程。例如,美国第一代GPS功能比较单,经过30多年发展和持续现代化改造,定位精度、可用性、完好性和可靠性不断提升,精度优于1 m,自主导航运行能力将达180天,系统抗干扰和导航战能力 明显加强;俄罗斯GLONASS通过不断突破技术,加快了卫星更新换代,新增码分多址导航信号和部署星基增强系统,将具备提供重点区域亚米级导航服务能力;欧盟Galileo系统从试验验证起步,经过不断创新发展,系统精度将优于1 m,能够提供全球生命救援等多种服务。 1.3 卫星导航的应用由有限领域、局部服务向多元客户、全域服务转变 目前,美国GPS在能源、交通、电力金融、通信网络、精细农业、生命救援等全球民用领域广泛应用,占据世界卫星导航市场的95%份额;美军主战平台嵌入GPS 终端数量超.过10万个,单兵装备超过56万套,基本覆盖美军各个作战单元,成为最为依赖的装备系统。GPS的推广应用印证了专家们讲的卫星导航系统“没有做不到,只有想不到”的断言。从目前世界卫星导航系统应用模式、领域、层次看,仍然存在深度开发挖掘的潜力。军事应用将从最初作战单元独立应用。向陆海空各军兵种成建制成体系应用发展,从单机单装的用向多平台、多系统嵌入式网络化集成应用发展;从以导航定位为主向与侦察预警、指挥控制、火力打击、地理信息系统融合应用发展"。 2我国建立“北斗”卫星导航系统的意义 2.1 国家安全 建立自己的导航系统,避免在将来的战争中受制于人,同时我们还有了相同的手段可以反制敌人。导弹要导航,战斗要定位,还得知道哪可以躲,哪可以藏,敌人藏在哪,这都要靠卫星导航定位系统,如果我们一味地依赖于别人的定位系统,不自己开
惯性导航系统的发展及应用 绪论 惯性导航是一门重要的学科技术,它是飞机、船舶、火箭等载体能顺利完成导航和控制任务的关键性技术之一。1942年德国在V-2火箭上首次应用了惯性导航原理;1954年纯惯性导航系统在飞机上试飞成功。30余年来,惯性导航技术获得迅速发展。在我国惯性导航技术已在航空、航天、航海和陆地车辆的导航和定位中得到应用。1970年以来,我过多次发射的人造地球卫星和火箭都采用了本国研制的惯性导航系统。不仅如此,70多年以来,这门科学技术还在大地测量、海洋勘测、石油钻井、航空测量和摄影等国民经济领域里获得成功应用。 惯性导航简介 惯性导航(Inertial Navigation)是20 世纪中期发展起来的完自主式的导航技术。通过惯性测量组件(IMU)测量载体相对惯性空间的角速率和加速度信息,利用牛顿运动定律自动推算载体的瞬时速度和位置信息,具有不依赖外界信息、不向外界辐射能量、不受干扰、隐蔽性好的特点,且惯导系统能连续地提供载体的全部导航、制导参数(位置、线速度、角速度、姿态角)。惯性导航技术,包括平台式惯导系统和捷联惯导系统。平台式惯性导航系统将陀螺通过平台稳定回路控制平台跟踪导航坐标系在惯性空间的角速度。捷联惯性导航系统利用相对导航坐标系角速度计算姿态矩阵,把雷体坐标系轴向加速度信息转换到导航坐标系轴向并进行导航计算。惯性导航系统通常由惯性测量装置、计算机、控制显示器等组成。惯性测量装置包括加速度计和陀螺仪,又称惯性导航组合。3个自由度陀螺仪用来测量飞行器的三个转动运动;3个加速度计用来测量飞行器的3个平移运动的加速度。计算机根据测得的加速度信号计算出飞行器的速度和位置数据。控制显示器显示各种导航参数。 陀螺仪 陀螺仪是惯性系统的主要元件。陀螺仪通常是指安装在万向支架中高速旋转的转子,转子同时可绕垂直于自转轴的一根轴或两根轴进动,前者称单自由度陀螺仪,后者称二自由度陀螺仪。陀螺仪具有定轴性和进动性,利用这些特性制成了敏感角速度的速率陀螺和敏感角偏差的位置陀螺。由于光学、MEMS 等技术被引入于陀螺仪的研制,现在习惯上把能够完成陀螺功能的装置统称为陀螺。陀螺仪种类多种多样,按陀螺转子主轴所具有的进动自由度数目可分为二自由度陀螺仪和单自由度陀螺仪;按支承系统可分为滚珠轴承支承陀螺,液浮、气浮与磁浮陀螺,挠性陀螺(动力调谐式挠性陀螺仪),静电陀螺;按物理原理分为利用高速旋转体物理特性工作的转子式陀螺,和利用其他物理原理工作的半球谐振陀螺、微机械陀螺、环形激光陀螺和光纤陀螺等。 单自由度陀螺仪敏感角速度,二自由度陀螺仪敏感角位移。为了将角速度和角位移转换成惯性系统中可用的信号,陀螺仪需安装信号传感器。为了能控制陀螺仪按一定的规律进动,需安装力矩器。 加速度计 加速度计是惯性导航系统的核心元件之一。依靠它对比力的测量,完成惯性导航系统确定载体的位置、速度以及产生跟踪信号的任务。载体加速度的测量必须十分准确地进行,而
深空探测的自主导航技术研究综述 学号:0910200129,姓名:李吉 摘要:导航定位是深空探测的基础,由于深空探测距离遥远,导航的精度要求非常高,其中测距、测速、测角依照传统地球卫星的导航定位方法很难完成。X 射线脉冲星作为自然的天体,其运行特性不会受到人为的破坏与干扰,具有适于自主导航的显著特征,非常适合于深空探测的导航。本文综合国内外现有的研究成果,系统阐述了基于 X 射线脉冲星自主导航的基本原理、关键技术、国内外的研究现状以及我国现有的基于 X 射线脉冲星自主导航技术研究的基础条件。从而指出,我国已经具备 X 射线脉冲星观测和理论研究的基本条件。基于 X 射线脉冲星的自主导航是实现航天器高精度自主导航的新思路和可行途径,对于深空探测具有重要的理论研究意义和实际工程应用价值。 关键词:深空探测;X 射线脉冲星;自主导航 1 .引言 二十一世纪以来,各主要航天大国纷纷将深空探测作为重点发展的航天领域之一;而我国也正在加紧自己的探测步伐[1]。导航定位是深空探测的基础,深空探测器在空间运行,地面站同它建立通信链路,为保证通信质量必须知道探测器在相应坐标系中的位置(距离和角度)和速度,使得天线主瓣方向能够对准探测器和接收信号,反之同理。由于深空探测距离遥远,需要精确的测角、测距和测速能力,为深空探测器导航定位。因为空间探测器定轨的优势是深空探测器的大致位置事先知道,不需要测定整个距离,只需对事先确定的值进行验证和改进。现在对于地球周围的卫星,无论是静止轨道还是低轨和中轨上的卫星,对其 定轨都不存在太大的困难。但是由于深空探测距离遥远,导航的精度要求非常高,其中测距、测速、测角依照传统地球卫星的导航定位方法很难完成[2]。 上世纪60-70年代,深空探测导航系统主要采用地基无线电外测技术为巡航阶段的探测器导航和测轨,甚至用在探测器交会阶段。80年代以来,采用甚长基线干涉技术,利用测距换算出角度,利用增加的基线长度减少测距误差的影响,测角精度达20-30nrad。NASA进而又开发了连接元干涉技术,两测站之间相距21km,宽带光纤连接的测站将收到的信号用光纤传到信号处理中心,实时导航精度达80nrad[3]。 NASA正在开发同波束干涉技术,它是在两个航天器非常接近的情况下,它们可以在地面天线的同一波束内观测,使得两个深空站天线对两个航天器同时观测,产生差分干涉测量,提供天平面上两个航天器非常精确的相对角位置[4]。 中国国内有学者提出利用地球静止轨道卫星编队进行深空导航,将卫星编队的轨道高度上升到静止轨道高度,在地球静止轨道上相距一定角度分布两个卫星编队。采用两个卫星编队相距59°地心夹角,构成天基连续导航系统。该卫星编队采用无源反向导航方法,多颗卫星共同接收深空探测器信号,依照信号到达各个卫星时间差确定探测器空间位置[5]。 但是,在深空探测的过程中,航天器远离地球,与地面通信困难且易受到干扰,因此具有自主导航能力非常重要。由于目前的导航卫星主要是为地面和近地空间应用设计的,难以应用于深空轨道;由于飞行时间很长,惯导系统漂移很大,需要引入独立的导航系统进行修正;一般的星敏感器也易于受到太阳的干扰。而应用脉冲星导航则有望克服以上的困难。
技术开发与应用 组合导航技术的发展趋势 曾伟一1 林训超2 曾友州3 贺银平4 (1.2.3.4.成都航空职业技术学院,四川成都610100) 收稿日期:2011-01-10 作者简介:曾伟一(1956 ),男,四川省成都市人,副教授,主要研究方向为电气自动化和微机控制技术。 摘 要:本文揭示了组合导航技术的优越性,论述了组合导航的关键技术,对硅微惯性测量单元的发展和应用情况进行了介绍,指出GNSS/INS 组合中松耦合、紧耦合与深耦合方式的技术特点,展望了耦合技术未来发展方向。 关键词:组合导航 卫星导航 惯性导航 中图分类号:TN967 2 文献标识码:B 文章编号:1671-4024(2011)02-0041-04 Development Tendency of Integrated Navigation Technology ZE NG Weiyi 1,LIN Xunchao 2,ZE NG Youzhou 3,HE Yinping 4 (1.2.3.4.Chengdu Aeronautic Vocational &Technical College,Chengdu,Sichuan 610100,China) Abstract This paper analyzes the advanta ges of integrated navigation technique and the key inte grated navigation technology,presents the development and application of measuring units of silicon micro inertia,points out the techniques of loose coupling,tight coupling and deep c oupling in the combination of GNSS and INS and prospects the development tendenc y of c oupling technology. Key Words integrated navigation,GNSS,I NS 组合导航是采用两种或两种以上导航系统,形成的性能更高、安全性和可靠性更强的导航方式。可与GNSS 进行组合导航的技术有I NS 、多普勒雷达、天文导航、气压高度表、磁力计等。目前世界上应用最为广泛、性能最优、自主性最强的组合导航为卫星导航系统和惯性导航系统的组合,该组合系统主要利用卫星导航系统的长期稳定性与适中精度,来弥补I NS 的误差随时间传播或增大的缺点,同时再利用I NS 的短期高精度来弥补卫星导航接收机在受干扰时误差增大或遮挡时丢失信号等的缺点,提高卫星导航的动态性能和抗干扰能力和卫星的重新捕获能力,从而实现完整的高精度、高可靠性、高稳 定性、高适用性、持续全天候的导航,广泛应用于海、陆、空、天各领域,包括飞机、轮船、车辆、机器人等的 导航。组合导航技术已成为目前世界上最先进的、全天候、自主式制导技术,也是导航技术最具有应用前景的发展方向[1] 。本文针对未来组合导航定位领域的关键技术的发展趋势和面临的挑战进行了论述。 一、惯性器件发展趋势与面临的挑战 惯导系统的误差源包括陀螺和加速度计的器件误差、系统初始对准误差和导航解算中采用的重力场模型误差等,器件误差为大多数系统的主要误差源 [2] 。 41 成都航空职业技术学院学报Journal of Che ngdu Aeronauti c Voc atio na l a nd Te chni cal Col lege 2011年06月第2期(总第87期)Vol.27No.2(Serial No.87)2011
导航定位技术及相关应用 在全球一体化和科技快速发展的今天,导航定位技术在日常工作和生活中扮演了愈来愈重要的角色,尤其是在我们石油天然气这个高技术行业,无论在地质信息采集、钻井、平台安装、管道铺设维护等各方面都离不开导航定位。本文对导航定位技术进行了全面的介绍,并列举了在平湖海管检测上的应用实例。 一、导航定位发展的历程及最新技术 最早的导航定位手段有:14世纪前后开始利用指南针(即罗盘)进行定位的地物定位方法,18世纪30-40年代出现的利用六分仪、天文钟进行定位的天文定位方法。传统的地物定位方法现今已成为特殊情况下的补充手段。二十世纪出现了无线电定位仪。经过几十年的发展,无线电导航定位仪进行了如下表所示的演变过程: 常规无线电定位仪有这样一些缺点:覆盖的工作区域小,电波传播受大气影响;定位精度不高,精度只能达到200米甚至上千米。 现在,导航定位技术已进入高精度卫星导航定位时代。目前已开发或正在开发的全球卫星导航定位系统有:美国开发的全球定位系统(Navigation Sateliate Timing and Ranging/Global Positing System,GPS);为了摆脱对美国GPS的依赖(主要从国家安全利益考虑),俄罗斯开发了GLONASS(Global Navigation Satellite System)全球导航系统;中国开发了北斗卫星定位系统;欧盟正在加紧开发伽里略卫星导航定位系统( Galileo) (中国也已参与合作开发)。 美国开发的全球定位系统(Navigation Satelite Timing and Ranging/Global Positing System,GPS)可在全球范围内全天候为海上、陆上、空中和空间用户提供连续的、高精度的三维定位、速度和时间信息。GPS 系统包括三大部分:空间卫星系、地面控制系统、接收系统如下图所示: GPS的工作原理是以三角测量定位原理来进行定位的。它采用多星高轨测距体制,以接
一.名词解释. 1.导航,导航系统及常用导航方法.(书P1) 导航:将航行体从起始点导引到目的地的技术方法. 导航系统:能够向航行体的操纵者或控制系统提供航行体位置,速度,航向等即时运动状态的系统. 常用导航方法:①航标方法.②航位推算法.③天文导航.④惯性导航.⑤无线电导航.⑥卫星定位导航. 2.航位推算导航.(书P1) 航位推算导航:从一个已知坐标位置开始,根据航行体在该点的航向,航速和航行时间,推算下一时刻的坐标位置的导航过程和方法. 优点:航位推算导航技术不受天气,地理条件的限制,是一种自主式导航方法. 缺点:随着时间的推移,其位置累积误差会越来越大. 3.衡量导航性能的参数有哪些? 答:精度,覆盖范围,系统容量,导航信息更新率,导航信息维数;可用性,可靠性,完善性,多值性. 4.伪距.(书P13) 用户接收机一般不可能有十分精确的时钟,他们也不与卫星钟同步,因此用户接收机测量得出的卫星信号在空间的传播时间是不准确
的,计算得到的距离也不是用户接收机和卫星之间的真实距离.这种距离叫做伪距. 5.定轴性与进动性.(书P36) 定轴性:陀螺仪的转子绕自转轴高速旋转,即具有动量矩H 时,如果不受外力矩作用,自转轴将有相对惯性空间保持方向不变的特性. 进动性:如果在陀螺仪上施加外力矩M,会引起陀螺仪动量矩H 相对惯性空间转动的特性. 6.比力.(书P53) 设质点在i 系(惯性系)中的位矢为r ,质点在外力作用下在惯性空 间的运动状态可用牛顿第二定律导出,即22i d r F m mr dt == .在上述等式当中,+F F F = 引非引力,F 非引力为非引力外力,是指作用在载体上的发 动机推力,空气阻力,升力,地面反作用力等等.=F mG 引为引力外力.由此得2 2i F d r G dt m =+ 非引力.比力定义为F f m =非引力,为载体的非引力惯性加速度矢量,也称视加速度矢量.G 为中心引力加速度矢量. 7.惯导系统(书P31) 惯性导航系统(Inertial Navigation System,INS)是利用惯性敏感器(陀螺仪和加速度计)测量得到的载体运动的角速率和加速度,依据惯性定律计算载体位置,速度,姿态等运动参数的装置或系统.
编者按:卫星导航系统发展至今,因其全球性、连续性、实时性、全天候和高精度的特点, 已经广泛应用于陆地、海洋、天空和太空的各类军事及民用领域中,成为目前最常用的导航定位 技术。因此,受到了世界各国的极大重视,成为继互联网、移动通信之后发展最快的信息产业之 一。作为一种重要的国家信息基础设施,美国、俄罗斯、欧盟都不惜投入巨资建设卫星导航系统。 目前,美国GPS 、俄罗斯的全球导航卫星系统(GLONA SS )和中国的“北斗一号”卫星导航系 统均已投入商业运行。由中国和欧洲15国共同参与的欧洲民用卫星导航“伽利略计划”以及中 国的“北斗二号”也在积极推进中。 作为无线电导航技术之一,卫星导航技术已经广泛应用于现代军事斗争的许多领域,极大地 提高了部队的整体作战能力,是取得现代信息战争主导权的重要手段之一。因此,我们开设关于 卫星导航技术专题讲座,向通信工程技术人员、研究生和高年级本科生介绍卫星导航技术的原理 及有关知识,希以达到拓宽知识面,共同推动卫星导航技术的发展和应用,并加强卫星导航与通 信结合应用研究的目的。本讲座内容涉及卫星导航系统应用现状及发展简史、系统组成、工作原 理,介绍卫星导航中的增强技术、组合导航技术、高灵敏接收技术及A 2GN SS 技术等。 卫星导航技术专题讲座(一) 第1讲 卫星导航技术与应用的发展 Ξ 吕 晶,李广侠,于 永 (解放军理工大学通信工程学院训练部,江苏南京210007)摘 要:文中介绍了卫星导航的发展简史,阐述了卫星导航在民事和军事中的应用,并总结了卫星导航的技术 发展。 关键词:卫星导航;应用;技术发展 中图分类号:TN 967.1文献标识码:A 文章编号:CN 3221289(2009)0320095205 D e ve lopm e nt of GNS S Te chnique s a nd A pp lica tions L V J ing ,L I Guang 2x ia ,YU Y ong (T raining D epantm ent I CE ,PLAU ST ,N anjing 210007,Ch ina ) A bs tra c t :T he h isto ry of GN SS w as in troduced firstly .T hen the app licati on s in civil and m ilitary w ere discu ssed and the developm en t of its techn iques w as summ arized . Ke y w o rds :GN SS ;app licati on s ;developm en t of techn iques 导航是一种技术与方法的总称,它的最基本的作用是将运载体(飞机、车辆、舰船及人员)从起始点沿着所选定的路线安全、准确、准时地导引到目的地。在这个过程中,确定运载体的几何位置(即定位)是基础。 第30卷第3期 2009年9月军 事 通 信 技 术Journal of M ilitary Comm unicati ons T echno logy V o l .30N o.3Sep.2009 Ξ收稿日期:2009204229;修回日期:2009206210 作者简介:吕晶(19652),男,教授.
2012年2月刊 人工智能与识别技术 信息与电脑 China Computer&Communication 1.引言 智能交通系统(ITS )已被公认为解决消防部队在突发事故发生时如何快速抵达事故现场问题的有效途径,它是在关键基础理论研究的前提下,将先进的信息技术、数据通信技术及电子控制技术等有效地综合运用于地面交通运输体系,从而建立起一种大范围、全方位发挥作用、实时、准确、高效的交通运输系统。 车辆定位导航技术是ITS 中的关键技术之一。车辆导航定位系统的首要功能是能够提供车辆的位置、速度和航向等信息,而精确、可靠的车辆定位则是实现导航功能的前提和基础。常用的车辆定位技术主要有:航位推算技术(DR)、卫星定位技术(GPS)、惯性导航技术(INS)、地图匹配技术(MM)等等。由于基于任何一个单独的定位技术的系统都有本身无法克服的短处,因此出现了组合导航系统。本文根据智能交通系统的特点,提出了GPS 、航位推算技术与地图匹配技术相结合的组合导航系统。 2.GPS定位技术 全球定位系统(Global Positioning System-GPS)[1] 是当前全球定位系统中技术最成熟,应用也最为广泛的系统。它可以全天候连续为全球范围陆、海、空军民用户提供定位导航信息,用户设备的定位精度优于20m ,时间准确度达到ns 量级。具有全天候,定位迅速,精度高,可连续提供三维位置(精度、纬度和高度)、三维速度和时间信息等一系列优点[2],主要应用于单点导航定位与相对测地定位两个方面,是当今车辆定位导航的主流。 GPS 系统包括三大部分:(1)空间部分——GPS 卫星星座 由24颗在轨卫星和3颗备份卫星组成,部署在高达20200km 的轨道上,在地球上和近地空间任何一点均可连续同步地观测4颗以上卫星,从而实现全球、全天候连续导航定位。 GPS 的空间卫星星座如图1所示: 组合定位导航技术研究 谭炳文 (武警赣州市消防支队上犹县公安消防大队,江西赣州341200) 摘要:定位导航技术是智能交通系统(ITS )的关键技术之一。文章首先介绍了GPS 、INS (惯性导航)、DR (航位推算)三种常用定位导航技术,重点研究了各自的优点及缺点。接着探讨了GPS/DR 组合定位导航技术的优势所在。最后,为了进一步提高定位精度,提出采用MM (地图匹配)技术来进一步修正误差,使得定位功能更加准确可靠。 关键词:GPS ;惯性导航;航位推算;地图匹配 中图分类号:U666 文献标识码:A 文章编号:1003-9767(2012)02-0008-03 (2)地面控制部分——地面监控系统 地面控制部分是整个系统的中枢,由美国国防部管理,它包括1个主控站,5个监控站。主控站负责对地面监控站的全面控制。监控站内装备有接收机、原子钟、气象传感器及数据处理计算机,其任务是追踪及预测GPS 卫星轨道,控制GPS 卫星状态及轨迹偏差,维护GPS 系统的正常运作。 (3)用户设备部分——GPS 信号接收机 用户部分则是适用于各种用途的GPS 接收机,其主要功能是接收GPS 卫星播发的定位信息,GPS 用户接收机是由主机、电源和天线组成。主机的核心部件是信道电路、基带处理电路和中央处理器,在专用软件的控制下,进行作业卫星选择、数据搜集、加工、传输、处理和存储,其天线则接收来自各方位的导航卫星信号。GPS 接收机接收到从卫星传来的连续不断的编码信号后,再根据这些编码辨认相关的卫星,从导航电文中获取卫星的位置和时间,然后计算出接收机(即用户)所在的准确地理位置。 三者的关系如图2所示: 图1 GPS的空间卫星星座 图2 GPS全球卫星定位系统的三大组成 GPS 导航利用GPS 模块接受导航卫星信号,然后计算出汽车的经纬度、速度、行驶方向、时间等信息,它具有全球性、全天候、低成本、高精度、实时三维的测定位置和速度的能力,因而有很大的优势。 但是,GPS 导航也有其本身所固有的弱点[3],主要是非自主性、易受干扰、动态性能较差,卫星信号因在有些地方受遮挡会导致丢失信号而影响定位,定位精度容易受电子欺骗等因素影响。更致命的是城区内地物特征复杂,当卫星信号被树木、城市高层建筑、隧道和桥梁等遮挡或GPS 接收机接收不到四颗及以上的卫星信号时,GPS 导航系统便不能提供连续导航信息,其定位误差将增大,甚至可能出现不 定位的现象。
卫星导航技术主要应用领域有哪些以GPS为代表的卫星导航引用产业已逐步成为一个全球性的高新技术产业,普遍应用于地理数据采集、测绘、车辆监控调度和导航服务、航空航海、军用、时间和同步、机械控制、大众消费应用。 一、地理数据采集 人类80%的活动与空间信息有关,地理数据采集是GNSS最基本的专业应用,用来确认航点、航线和航迹。国土、矿产和环境调查等需要确定采样的点位信息,铁路、公路、电力、石油、水利等需要确定管线位置信息,房地产、资产和设备巡检需要面积和航迹位置信息。GIS数据采集产品正在成为满足各行业对空间地理数据需求的常用工具。 二、高精度测量 卫星导航应用给测绘界带来了一场革命,现已广泛应用在大地测量、资源勘查、地壳运动、地籍测量及工程测量等领域,在海洋测量和海洋工程中的应用也已进兴起。与传统的测量手段相比,卫星导航应用有巨大的优势:测量精度高;操作简便,仪器体积小,便于携带;全天候操作;观测点之间无需通视。
三、车辆监控调度及导航服务 车辆监控调度应用系统通过GNSS全球定位技术,利用通信信道,将移动车辆的位置数据传送到监控中心,实现GIS的图形化监视、查询、分析功能,对车辆进行调度和管理。 车载导航系统结合了卫星导航技术、地理信息技术和汽车电子技术,可在显示器上精确显示汽车的位置、速度和方向,为驾驶者提供实时的道路引导。 四、航空和航海应用 ·航空应用 为满足日益增长的空中运输量的需求,适应新型飞机航程的扩展与航速的提高,克服陆基空中交通管理系统的局限性,国际民航组织(ICAO)决定实施基于卫星导航、卫星通信和数据通信技术的新的空中交通管理系统,即新航行系统。根据ICAO的要求,新系统和原系统在2005年前同时使用,到2010年全球范围内的陆基系统将逐步停止使用,2010年以后新系统将作为唯一手段在全世界范围内运行。 ·航海应用(主要包括救援、导航和港口运作) 1992年2月1日,国际海事组织在全世界范围内实施《全球海上遇险和安全系统》(GMDSS),利用海事卫星(INMARSAT)改善海上遇险与安全通信,建立新的全球卫星通信搜救网络。使用了全球卫星导航系统后,弥补了GMDSS系统在确定位置方面的不足。 海洋和河道运输是当今世界上最广泛应用的运输方式,效率、安全和最优化是海洋和河道运输重点。卫星导航技术的应用,有效地实现了最小航行交通冲突,最有效地利用日益拥挤的航路,保证了航行安全,提高了交通运输效益。 卫星导航广泛应用于港口船舶进出港导航、现场调度指挥监控、GIS建库和维护、信息管理系统建设等方面,对加速港口现代化建设起到了不可替代的作用。 五、军用
MEMS技术的研究 一、MEMS技术概述 MEMS技术是采用微制造技术,在一个公共硅片基础上整合了传感器、机械元件、致动器(actuator)与电子元件。MEMS通常会被看作是一种系统单晶片(SoC),它让智能型产品得以开发,并得以进入很多的次级市场,为包括汽车、保健、手机、生物技术、消费性产品等各领域提供解决方案。 1.1、微机电系统(MEMS)概念 虚微机电系统(Micro-Electronic Mechanical System-MEMS),是在微电子技术基础上结合精密机械技术发展起来的一个新的科学技术领域,微机电系统是一个独立的智能系统。 一般来说,MEMS是指可以采用微电子批量加工工艺制造的,集微型机构、微型传感器、微型致动器(执行器)以及信号处理和控制电路,直至接口、通讯和电源等部件於一体的微型系统。其基本组成见图1.1所示。 图1.1 MEMS的组成 通常,MEMS主要包含微型传感器、执行器和相应的处理电路三部分。 微机电系统的制造工艺主要有集成电路工艺、微米/纳米制造工艺、小机械
工艺和其他特种加工工种。 在微小尺寸范围内,机械依其特徵尺寸可以划分为1-10毫米的小型(Mini-)机械,1微米-1毫米的微型机械以及1纳米-1微米的机械。 所谓微型机械从广义上包含了微小型和纳米机械,但并非单纯微小化,而是指可批量制作的集微型机构,微型感测器,微型执行器以及接口信号处理和控制电路、通讯和电源等于一体的微电子机械系统。 1.2、微机电系统(MEMS)发展简史 微机电的概念最早可追溯到1959年R.Fe ym.在加州理工大学的演讲。 1982年,K.E .Pe terson发表了一篇题为“Silicon as a Mechanical Material”的综述文章,对硅微机械加工技术的发展起到了奠基的作用。 微机电研究的真正兴起则始于1987年,其标志是直径为10um的硅微马达(转子直径120微米,电容间隙2 微米)在加州大学伯克利分校的研制成功,其引起了世界的轰动。自此以后,微电子机械系统技术开始引起世界各国科学家的极大兴趣。专家预言,它的意义可与当年晶体管的发明相比。 为了进一步完善这一学科,使其更多更快地为人类服务,除探索新技术,新工艺以外,各国科学家们还在积极努力从事MEMS基础理论研究,包括对微流体力学,微机械磨擦和其他相关理论的研究,并建立一套方便,快捷的分析与设计系统。 相信在不久的将来,MEMS将广泛渗透到医疗、生物技术、空间技术等领域。 1.3、微机电系统(MEMS)的特点及前景 微机电系统(MEMS)具有以下六种特点: 1.微型化:MEMS器件体积小、重量轻、耗能低、惯性小、谐振频率高、响应时间短。 2.以硅为主要材料,机械电器性能优良。硅的强度、硬度及杨氏模量与铁相当,密度类似铝,热传导率接近相和钨。 3.大量生产:用硅微加工工艺在一片硅片上可同时制造成百上千个微型机电装置或完整的MEMS,批量生产可大大降低生产成本。 4.集成化:可以把不同功能、不同敏感方向或致动方向的多个传感器或执行器集成于一体,或形成微传感器阵列、微执行器阵列,甚至把多种功能的器件集
全球定位系统及其应用综述(一) ———导航定位技术发展的沿革 刘美生 (中国测试技术研究院,四川成都610021) 摘 要:较全面地介绍了导航定位技术发展的历史进程,科学地阐述了陆基导航技术和星基导航定位系统对人类的重大贡献,着重介绍了美国GPS 、俄罗斯GLONASS 、中国北斗和欧盟Galileo 四大卫星导航定位系统,客观地分析了全球卫星导航定位系统在现代社会生活中的重要作用,尤其揭示了当今世界在卫星导航定位这一新兴技术领域的激烈竞争和发展方向。 关键词:导航;定位;卫星;全球定位系统;发展;沿革 中图分类号:P228.4 文献标识码:A 文章编号:1672-4984(2006)05-0001-07 Global positioning system and its application (1) ———history of development for navigation and positioning technology LIU Mei -sheng (National Institute of Measurement and Testing Technology ,Chengdu 610021,China ) Abstract :This paper presented all -s ided history of development for the navigation positioning technlogy ,discussed scientifically the huge contribution to human race about land -based navigation technology and satellite -based navigation positioning system and analyzed objectively the imp ortant role of global satellite navigation positioning system today .It especially revealed the violent competitions and pointed the direction of development in this new field of satellite navigation positioning .Key words :Navigation ;Positioning ;Satellite ;Global pos itioning system ;Development ;History 收稿日期:2006-05-08;收到修改稿日期:2006-06-22 基金项目:国家科技基础条件平台重点专项(2003DIA6N016)作者简介:刘美生(1951-),男,研究员,主要从事计量测试技术研究及科技管理,尤其在光电技术及机动车运行安全性能检测方面有深入研究。 1 引 言 当人们在森林中迷失方向时、当一艘孤舟在汪洋大海中漂泊时,当草原上的羊群找不到暮归的路时他们多么需要为他们领路、导向。实际上,在有生命的世界中,时时刻刻都存在导向问题。随着人类文明的不断进步,人们从刀耕火种的原始时代逐步发展到了有车、有船,甚至有了飞机、飞船、卫星的现代社会,导向的含义发生了根本性的外延和扩展。Navigation 源于海洋中船舶的航行,开初人们是通过罗盘、天文等手段对航行在海洋中的船舶进行导向和领航,后来发展到陆地车辆以及空中飞行器的领航,以致Navigation 逐渐被译成“导航”。 “导航”一词从广义上讲主要有两方面的活动范 畴,一是直观的、容易实施的,即在已知方向或路线的情况下给客体领路、导向,把客体带向目的地,比 如车队在领航员的带领下行进,船舶沿着罗盘给定的方向航行。二是控制型的、较复杂的,其实质是通过实时测定运动客体在途的位置(坐标)、速度、时间或姿态等动态参数,进行数据分析和计算,确定一条包括对速度、时间等方面有要求的科学的路线和一个科学的行驶方案,然后利用操作系统引导和控制运动客体沿着已确定的路线行驶,行驶过程中还要进行实时的纠偏和修正,如现代技术的船舶航行、飞机飞行、火箭发射以及装备了导航装置的各类车辆的行驶等等。 “导航”主要涉及的是运动客体的“方向”,而实际上一个客体的准确定位显得更为重要。无论客体是静止还是运动的,当它实时所在的位置参量确定后,也随之能确定表征该客体状态的一系列重要参量。例如,知道一辆失窃的汽车在大地坐标系中的坐标参数后,就能知道该车所处方位和具体的所在地点,为破案提供有效手段;在获取了飞行中飞机的 第32卷第5期 2006年9月中国测试技术 C HINA MEASUREME NT TECHNOLOGY Vol .32 No .5Sept .2006
激光微细加工技术及其在M EMS微制造中的应用La ser Micromachining and I ts Application in the Microfabrication of MEMS 潘开林①② 陈子辰② 傅建中① (①浙江大学生产工程研究所 ②桂林电子工业学院) 摘 要:文章综述了当前MEMS各类微制造技术,阐述了各种激光微细加工技术的原理、特点,主要包括准分子激光微细加工技术、激光LIGA技术、激光微细立体光刻技术等,以及它们在MEMS微制造中的应用。 关键词:激光微细加工 微机电系统 激光LIGA 微细立体光刻 微制造 1 MEMS及其微制造技术概述 微机电系统(ME MS)是微电子技术的延伸与拓宽,它不但具有信号处理能力,而且具有对外部世界的感知功能和执行功能,在此基础上可开发出高度智能、高功能密度的新型系统。ME MS器件与系统未来将成为多个领域的核心,其作用与以CPU为代表的集成电路构成当今电子系统的核心一样。鉴于ME MS技术的重要技术经济潜力和战略地位,引起了世界各国的高度重视。ME MS主要是美国学者的称谓,在日本称为微机械,在欧洲称为微系统。此外,微技术在不同的学科与应用领域,还有类似的不同的专业或行业术语,如生物技术领域的基因芯片(DNA芯片)、生物芯片(Bio-Chip),分析化学领域的微全流体分析系统(uT AS)、芯片实验室(Lab on Chip),与光学集成形成微光机电系统(MOE MS)等。 ME MS是从微电子技术发展而来,其微制造技术主要沿用微电子加工技术与设备。微电子加工技术与设备价格昂贵,适合批量生产。由于微电子工艺是平面工艺,在加工ME MS三维结构方面有一定的难度。目前,通过与其它学科的交叉渗透,已研究开发出以下一些特定的ME MS微制造技术。 (1)LIG A技术 LIG A和准LIG A技术最大的特点是可制出高径比很大的微构件,但缺点同样突出,成本高。 (2)材料去除加工技术 这类技术主要包括准分子激光微细加工[1~4]、微细电火花加工[5]、以牺牲层技术为代表的硅表面微细加工、以腐蚀技术为主体的体硅加工技术、电子束铣、聚焦离子束铣等。 (3)材料淀积加工技术 这类技术主要包括激光辅助淀积(LC VD)、微细立体光刻[6、7]、电化学淀积等。 上述各类技术的对比分析如表1所示[5]。 表1 MEMS主要微制造技术对比 技术最小尺寸精度高宽比粗糙度 几何自 由度 材料范围LIG A 技术 ++++++++ 金属、聚合物、 陶瓷 刻蚀技术+-+-+-金属、聚合物 准分子 激光 -(+)-+--+ 金属、聚合物、 陶瓷 微细立 体光刻 -(+)-(+)++-++聚合物 微细电 火化 +++++++ 金属、半导体、 陶瓷LCVD++-++-+金属、半导体 金刚石 精密切削 +++++-- 非铁金属、 聚合物 注:表中++、+、-、--分别表示很好、好、较差、很差,+-表示不同应用条件下的相对效果,括号内的“+”表示最新研究有所进展。 在目前ME MS微细加工技术的研究与应用中,激光微细加工技术得到了广泛的关注与研究。激光微细加工制造商宣称激光微细加工技术具有:非接触工艺、有选择性加工、热影响区域小、高精度与高重复率、高的零件尺寸与形状的加工柔性等优点。 实际上,激光微细加工技术最大的特点是“直写”加工,简化了工艺,实现了ME MS的快速原型制造。此外,该方法没有诸如腐蚀等方法带来的环境污染问题,可谓“绿色制造”。 在ME MS微制造中主要采用的激光微细加工技术有:激光直写微细加工、激光LIG A、激光微细立体光刻等,下面分别加以介绍。 2 准分子激光直写微细加工及其在MEMS中的应用 准分子激光以其高分辨率、光子能量大、冷加工、 ? 5 ? 制造技术与机床 2002年第3期 Special R eports综 述
1、简答题: (1)为什么说组合导航系统是导航发展的方向?GPS/惯性组合导航系统有何特点? 答:组合导航系统是指用GPS、无线电导航、天文导航、卫星导航等系统中的一个或几个与惯导组合在一起,形成的综合导航系统。组合导航是近代导航理论和技术发展的结果。每种单一导航系统都有各自的独特性能和局限性,传统的单一导航系统由于自身存在各种缺陷已经不能满足现实需求。 惯性组合导航系统的特点如下: 1. GPS/INS组合对改善系统精度有利。 2. GPS/INS组合加强系统的抗干扰能力。 3. 惯性系统提高GPS接收机的跟踪能力。 4. 惯性系统可以解决周跳问题,而且降低对惯导系统的要求。 (2)说明组合导航系统的基本原理和不同校正方式的优缺点。 答:组合导航是将过去单独使用的各种导航设备通过计算机有机地组合在一起,应用卡尔曼滤波等数据处理技术,发挥各自特点,取长补短,使系统导航的精度、可靠性和自动化程度都大为提高,它的实质就是以计算机为中心,将各个导航传感器送来的信息加以综合和最优化处理,然后对导航参数进行综合显示或输出。 校正方式分为输出校正和反馈校正。利用各导航系统误差的估计值去分别校正各导航系统相应的输出导航参数,以得到导航参数的最优估计,这种方法称为开环方法,也称为输出校正;利用导航系统误差值的估计值去校正导航系统力学编排中相应的导航参数,即将误差估计值反馈到各导航系统的内部,将导航系统中相应的误差量校正掉,这种方法称为闭环法,也称为反馈校正。 输出校正和反馈校正特点如下: 1 输出校正中的误差状态是未经校正的误差量,而反馈校正的误差状态已经过校正,因此反馈校正能更接近的反映系统误差状态的真实动态过程。一般情况下,输出校正要得到与反馈校正相同的精度,应该采用更复杂的模型系统方程。 2 输出校正方式中各导航分系统相互独立工作,互不影响,因此系统可靠性较高;反馈校正属于深度组合,如果某一导航分系统不能正常工作,那么将影响其他导航分系统,因此可靠性相对输出校正较差。