
龙源期刊网 https://www.doczj.com/doc/2a16319137.html,
移动机器人超声波测距避障系统设计
作者:李恒徐小力左云波
来源:《现代电子技术》2014年第03期
摘要:测距避障是移动机器人适应未知复杂环境的能力之一,准确测出移动机器人和障碍物之间的距离是关键。以dsPIC33FJ256MC710单片机为核心研究设计了一种移动机器人超声波测距避障系统。该系统利用脉冲回波法测距,针对超声波在空气中的传播速度受环境温度的影响,设计了超声波速度温度补偿电路。实验结果表明该超声波测距避障系统测量数据准确,能够满足移动机器人在复杂环境中避障的需求。
关键词:移动机器人;测距避障;超声波;硬件电路
中图分类号: TN710?34; TP73 文献标识码: A 文章编号: 1004?373X(2014)
03?0157?03
Design of obstacle avoidance system with ultrasonic ranging based on mobile robot
LI Heng, XU Xiao?li, ZUO Yun?bo
(Ministry of Education Key Laboratory of Modern Measurement & Control Technology,Beijing Information Science & Technology University,
Beijing 100192, China)
Abstract:Obstacle avoidance with ranging is one of robot′s competencies in adapting to unknown complex environment. It is very important to measure the distance between the robot and the obstacles accurately. An obstacle avoidance system with ultrasonic ranging by mobile robot is designed with dsPIC33FJ256MC710 as the core. The distance between the robot and the obstacles is measured with pulse echo method. Ultrasonic velocity temperature compensation circuit is designed for ultrasonic velocity changes as the ambient temperature. Experimental results show that the system ranging accurately and is able to meet the requirement of obstacle avoidance for mobile robot in complex environments.
Keywords: mobile robot; obstacle avoidance by ranging; ultrasonic; hardware circuit
0 引言
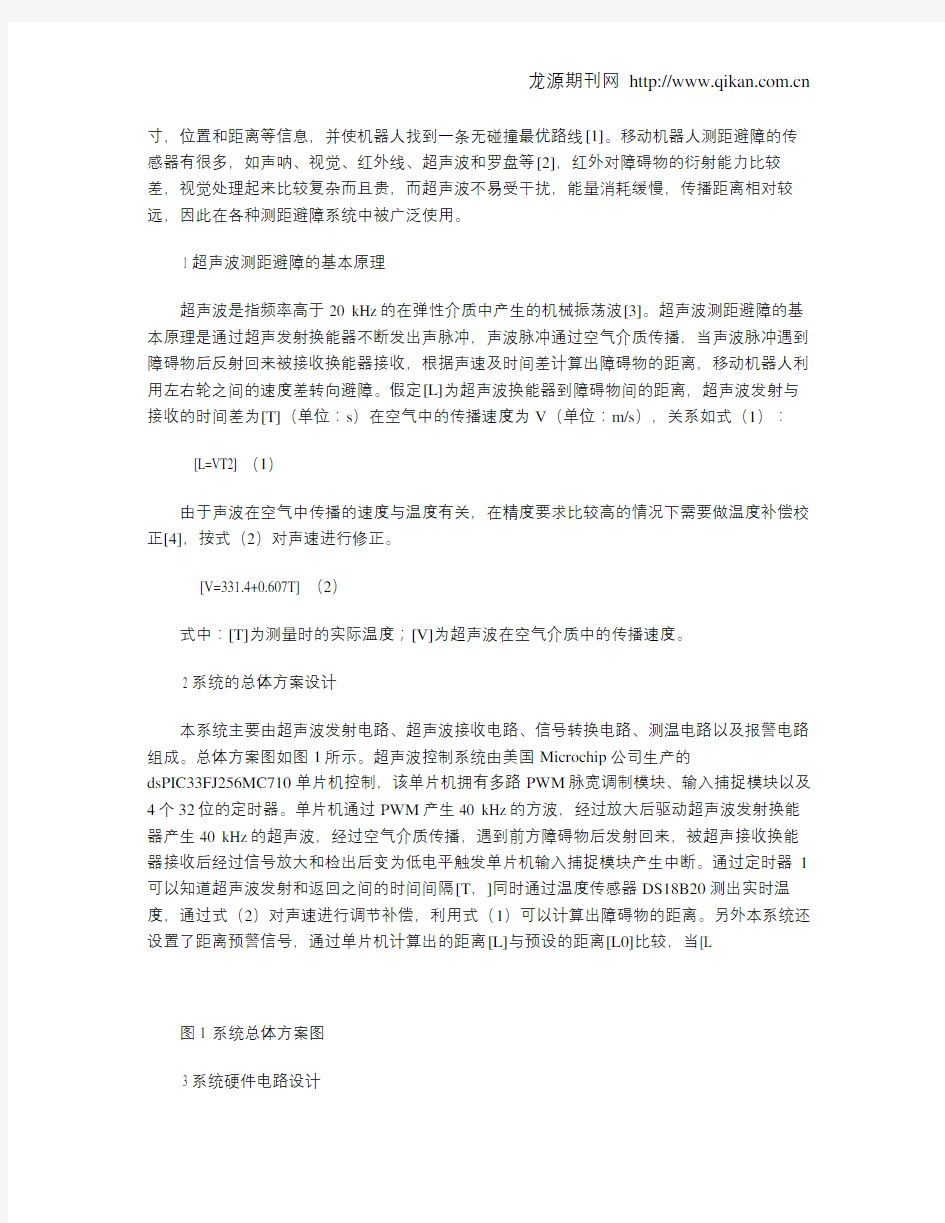
在某些特种环境,如反恐排爆、灾难救援等现场,特种机器人被广泛地用于代替人类执行信息获取、搜索救援、环境检测等工作。作业环境的复杂多变,要求特种机器人有较好的环境适应能力,能够在未知或者部分未知的环境中通过传感器获取周围环境信息,包括障碍物的尺寸,位置和距离等信息,并使机器人找到一条无碰撞最优路线[1]。移动机器人测距避障的传
目录 一、课程设计目的 (2) 二、内容及要求 (2) 2.1、设计内容 (2) 2.2、设计要求 (2) 三、超声波传感器的工作原理 (2) 四、系统框图 (3) 五、单元电路设计原理 (3) 5.1、51系列单片机的功能特 (4) 5.2、超声波发射电路 (4) 5.3、超声波检测接收电路 (5) 六、完整的电路图………………………………………………………………… 七、程序流程图 (6) 八、参考文献 (7) 九、设计中的问题及解决方法 (7) 十、总结 (7)
一、课程设计目的 通过《传感器及检测技术》课程设计,掌握传感器及检测系统设计的方法和设计原则及相应的硬件调试的方法。进一步理解传感器及检测系统的设计和应用。 二、内容及要求 超声波测距系统设计 2.1设计内容 采用40KHz的超声波发射和接收传感器测量距离。可采用发射和接收之间的距离,也可将发射和接收平行放在一起,通过反射测量距离。 功能:1)LED数码管显示测量距离,精确到小数点后一位(单位:cm)。 2)测量范围:30cm~200cm。 3)误差<0.5cm。 4)其它。 2.2设计要求 1)掌握传感器的工作原理及相应的辅助电路设计方法。 2)独立设计原理图及相应的硬件电路。 3)设计说明书格式规范,层次合理,重点突出。并附上详细的原理图。 三、超声波传感器的工作原理 由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。利用超声波检测距离,设计比较方便,计算处理也较简单,并且在测量精度方面也能达到农业生产等自动化的使用要求。 目前在近距离测量方面常用的是压电式超声波换能器。根据设计要求并综合各方面因素,本文采用AT89C51单片机作为控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器。 超声波测距的原理是利用超声波的发射和接受,根据超声波传播的时间来计算出传播距离。实用的测距方法有两种,一种是在被测距离的两端,一端发射,另一端接收的直接波方式,适用于身高计;一种是发射波被物体反射回来后接收的反射波方式,适用于测距仪。此次设计采用反射波方式。 理论计算 如图1所示为反射时间法,是利用检测声波发出到接收到被测物反射回波的时间来测量距离其原理如图所示,对于距离较短和要求不高的场合我们可认为空气中的声速为常数,我们通过测量回波时间T利用公式(T/2) C S=其中,S为被 * 测距离、V为空气中声速、T为回波时间(T2 =),这样可以求出距离: T1 T+
A Matlab-based Simulator for Autonomous Mobile Robots Abstract Matlab is a powerful software development tool and can dramatically reduce the programming workload during the period of algorithm development and theory research. Unfortunately, most of commercial robot simulators do not support Matlab. This paper presents a Matlab-based simulator for algorithm development of 2D indoor robot navigation. It provides a simple user interface for constructing robot models and indoor environment models, including visual observations for the algorithms to be tested. Experimental results are presented to show the feasibility and performance of the proposed simulator. Keywords: Mobile robot, Navigation, Simulator, Matlab 1. Introduction Navigation is the essential ability that a mobile robot. During the development of new navigation algorithms, it is necessary to test them in simulated robots and environments before the testing on real robots and the real world. This is because (i) the prices of robots are expansive; (ii) the untested algorithm may damage the robot during the experiment; (iii) difficulties on the construction and alternation of system models under noise background; (iv) the transient state is difficult to track precisely; and (v) the measurements to the external beacons are hidden during the experiment, but this information is often helpful for debugging and updating the algorithms. The software simulator could be a good solution for these problems. A good simulator could provide many different environments to help the researchers to find out problems in their algorithms in different kinds of mobile robots. In order to solve the problems listed above, this simulator is supposed to be able to monitor system states closely. It also should have flexible and friendly users’ interface to develop all kinds of algorithms. Up to now, many commercial simulators with good performance have been developed. For instance, MOBOTSIM is a 2D simulator for windows, which provides a graphic interface to build environments [1]. But it only supports limited robot models (differential driven robots with distance sensors only), and is unable to deal with on visual based algorithms. Bugworks is a very simple simulator providing drag-and-place interface [2]; but it provides very primitive functions and is more like a demonstration rather than a simulator. Some other robot simulators, such as Ropsim [3], ThreeDimSim [5], and RPG Kinematix [6], are not specially designed for the development of autonomous navigation algorithms of mobile robots and have very limited functions. Among all the commercial simulators, Webot from Cyberbotics [4] and MRS from Microsoft are powerful and better performed simulators for mobile robot navigation. Both simulators, i.e. Webots and MRS, provide powerful interfaces to build mobile robots and environments, excellent 3-D display, accurate performance simulation, and programming languages for robot control. Perhaps due to the powerful functions, they are difficult to use for a new user. For instance, it is quite a boring job to build an environment for visual utilities, which involves shapes building, materials selection, and illumination design. Moreover, some robot development kits have built-in simulator for some special kinds of robots. Aria from Activmedia has a 2-D indoor simulator for Pioneer mobile robots [8]. The simulator adopts feasible text files to configure the environment, but only support limited robot models. However, the majority of commercial simulators are not currently supporting On the other hand, Matlab
龙源期刊网 https://www.doczj.com/doc/2a16319137.html, 移动机器人超声波测距避障系统设计 作者:李恒徐小力左云波 来源:《现代电子技术》2014年第03期 摘要:测距避障是移动机器人适应未知复杂环境的能力之一,准确测出移动机器人和障碍物之间的距离是关键。以dsPIC33FJ256MC710单片机为核心研究设计了一种移动机器人超声波测距避障系统。该系统利用脉冲回波法测距,针对超声波在空气中的传播速度受环境温度的影响,设计了超声波速度温度补偿电路。实验结果表明该超声波测距避障系统测量数据准确,能够满足移动机器人在复杂环境中避障的需求。 关键词:移动机器人;测距避障;超声波;硬件电路 中图分类号: TN710?34; TP73 文献标识码: A 文章编号: 1004?373X(2014) 03?0157?03 Design of obstacle avoidance system with ultrasonic ranging based on mobile robot LI Heng, XU Xiao?li, ZUO Yun?bo (Ministry of Education Key Laboratory of Modern Measurement & Control Technology,Beijing Information Science & Technology University, Beijing 100192, China) Abstract:Obstacle avoidance with ranging is one of robot′s competencies in adapting to unknown complex environment. It is very important to measure the distance between the robot and the obstacles accurately. An obstacle avoidance system with ultrasonic ranging by mobile robot is designed with dsPIC33FJ256MC710 as the core. The distance between the robot and the obstacles is measured with pulse echo method. Ultrasonic velocity temperature compensation circuit is designed for ultrasonic velocity changes as the ambient temperature. Experimental results show that the system ranging accurately and is able to meet the requirement of obstacle avoidance for mobile robot in complex environments. Keywords: mobile robot; obstacle avoidance by ranging; ultrasonic; hardware circuit 0 引言 在某些特种环境,如反恐排爆、灾难救援等现场,特种机器人被广泛地用于代替人类执行信息获取、搜索救援、环境检测等工作。作业环境的复杂多变,要求特种机器人有较好的环境适应能力,能够在未知或者部分未知的环境中通过传感器获取周围环境信息,包括障碍物的尺寸,位置和距离等信息,并使机器人找到一条无碰撞最优路线[1]。移动机器人测距避障的传
10米超声波测距仪设计实现 一、功能要求 设计一个超声波测距仪,可以测量测距仪与被测物体间的距离。要求测量范围0.1~10.00米,测量精度1cm,测量时与被测物体不接触,并将测量结果显示出来。 二、系统硬件电路 1.单片机系统及显示电路 单片机采用89C51或89S51。采用12MHz高精度晶振,以获得较稳定的时钟频率,减小测量误差。单片机用p1.0端口输出超声波换能器所需的40Hz方波信号,利用外中断0口监测超声波接受电路输出的返回信号。显示电路采用简单实用的4位共阳极LED数码管,段码用74LS244驱动,位用PNP8550驱动。 2.超声波发射电路 主要由74LS04和超声波换能器T构成。这种推挽形式的方波信号可以提高发射强度。反相器并联提高驱动能力。上拉电阻R1、R2提高74LS04输出高电平的驱动能力。 3.超声波接收电路 CX20106A是接收38KHz超声波的芯片,可利用它做接收电路。 4.系统程序 超声波测距仪的软件主要由主程序、超声波发生子程序、超声波接收中断程序及显示子程序组成。 主程序:
开始 系统初始化 发送超声波脉冲 等待反射超声波 计算距离 显示结果 丢系统初始化,设置T0为方式1,EA=1,P0,P2清0。为避免超声波发射器直接接传送到接收器,需要延时0.1ms。由于时钟的频率是12MHz,计数器每计一个数就是1us。如果按声速344m/s,则d=c*t/2=172T0 cm 超声波发生子程序:通过P1.0端口发送2个左右超声波脉冲信号,脉宽12us,同时T0计数。 超声波测距仪利用中断0检测返回的超声波,一旦接收到返回的信号,立即进入中断。中断后就立即关闭T0停止计时。如果计数器益出则测试不成功。 3方案设计和选择 根据本次设计的要求,方案的选择应力求实用性强,性价比高,使用简单。 3.1 超声波测距的基本原理 谐振频率高于20kHz的声波被称为超声波。超声波
移动机器人控制系统的发展方向 摘要随着计算机技术、传感器技术的不断发展,对于机器人领域的发展具有一定的促进作用。而由于移动机器人具有能够自治与移动的特征,在机器人领域处于核心地位。在复杂、危险的环境中,移动机器人所发挥的作用是有目共睹的。对此,对当前国内外较为常见的移动机器人控制系统进行剖析,并在此基础上论述了该领域的未来发展方向。 【关键词】移动机器人控制系统发展方向 移动机器人属于能够自动执行工作任务的机器,不但能够按照事先编译的程序运行,同时人类还可对其指挥。当前主要被运用在生产业、建筑业以及航空航天领域,而该领域的发展情况直接关系到国家综合实力的提升速度,对此加强对移动机器人控制系统的发展情况,以及未来发展方向的研究势在必行。 1 国内外常见的移动机器人控制系统 相对于国内在移动机器人的研究状况,能够看出国外在该领域的研究是较早的,其中具有代表性的有Saphira、TeamBots以及ISR。而在国内方面,代表性的有OSMOR、ZJMR以及Agent。下面,便对较为常用的控制系统进行介绍:
1.1.1 Saphira控制系统 Saphira控制系统是移动机器人领域中最早的系统,是有SRI国际人工智能中心在1990年所研发的,此系统是基于本地感知空间的共享内存与黑板,来实现协调与通信进程。由于Saphira是采用C语言来进行开发的,同时支持Windows 与Unix系统,因此具有文档资料相对完整、系统资源占用少等特征。但是需注意的是,由于Saphira系统在定位方面无法达到当前的实际需求,因此运用是相对较少的。 1.1.2 TeamBots控制系统 本系统是基于Java包与Java应用程序而构建的,经过20余年的发展后,此系统截止到目前已经被运用到多种类型的机器人平台当中。除此之外,在适用的操作系统方面,其中具有代表性的有Windows、MacOS以及Linux等,因此其运用的范围是更加广泛的。 1.1.3 ISR控制系统 ISR是基于行为的控制模式,其中是有任务执行层、反映层以及推理层所构成的,是有CAS研究中心所研发的。其中,任务执行层的作用是执行推理层所传输的指令;反映层其中包含资源、控制器以及行为;推理层的功能是根据用户的指令来对决策进行制定。此外,ISR控制系统仅能够在Linux中进行操作,并且没有公开化使用。
超声波液位测量系统设计阳华忠孙传友长4女学电,;学M4¨025 鞭蛹隧鞠獬黼黜裂簿螽缓灏醺戳黼{t*t☆sPcEoBl^女m●^‰,LMl812≈,《{目^《tE“&”^#&*雎*t{《.*#自&m£i”1“女T一**¨t《,”‘f#十∞}m*.mtT≈,《ttt湿度.*^.B§f#境目t*Ⅻt十¥∞#自.tm7}#《*目^#^*&镕■t十来目f&.#^i&&■t¨#*t.豳■蕾鞠积整黼燃霸麟醐黼}E#.}m*,《’女;LMlB12 1引言 n【】__超市披挂求班}K迅速.4、M渗墟刮*个镯域.¨仃军¥Ⅸ玎驯缭婶冉IIii#8有rL£的“川.漓f±☆1删*和托M也址日常t僻巾十最盛的邻j域+披ft的删*片证卉他毒。恻如羞Ⅲ往洲n液俺U锌“,删屉池位,赳胜补偿趟自浊扯删量池似等等m采邢t些方法会J、腰劣∞环境和抽悼峦‘£的坐化给删*带m#k的瞄莘…毕“;fm悼具有蝇蚀什…嘲蚀删抽越^¨埘I№-陋,奉&计性出r坫f浮rn0磐【匕浊ms},cl,∞l^.1…单Jt扎LMl8l二越r々渡々m推成,0片#【f占,l的古洼自g{kI。硅U越。水《统可蒜性-≈.近H1fj:%精度高。 2参比法液位测量原理 警比洼H娘理是利用超}"往换能8发一¨110趟-;浊忸冲]Ⅲ过’Ln《传播0g鹰崔ft转^的并【日处掰成fi针日睦f々到搀能*片搏M接收。精Ⅲ忧5超声被¨垃日十纠挡牧自坩_{,J就“J眦牯确地计算Ⅲ随Ⅻ4披体的触协。其原H圳Ⅵl,j超声藏#射Ji掳4£趟十波∞传感*就鼻m趺控憧剑州柬m泄f:号求…濉足“枉准环处r“生的删∞帅时问为【o。B求H“#是I_I_泞r灶产’p的,删址的时问山r6掉F陆触洲浦傩的披1Ⅳ峦fLm坐化超J:一被“行早以j,的7L秆m。…々播。山十越钠【d的j{罐中1怍,超F*纠K,*q■fJ}”}千肌蛳的琏鹰+H‘÷,山ft可得 咖} P止巾vf)是超,r漓到拉准环∞迹Ⅱ。V是超声涟刊iTr顺_fii自0Jl嚏.“r“推111: ⅢJ+ H一=_』 胜艟Ⅻ目演津的液化- ¨】|0_hd }r=H卜坐1一d l^?hH是储删砝液体的涟n h-挂地奇被传晦%爿存*睡带的m离;h 是超■被心堪*Ⅻ",琐部的H捕.酒过 删%的时州“弹其值?ho是超声被f々盛* 判}tt*M一的啦离.一q椒擗址日】肫m】稠整棱 挂环的r*度;d是泞r项而刊油自帕* 离。m此”rⅢ删址日f々出#艘∞谴虚£ 芏*仃枉州温睦m鹿,≮H描{啊超 Jh挫∞速疃拚呆统带沫舶m菇。 法i坑錾盛观J#功矩{【l减少i统琨 蕈麓世gm满Mmr要求苴M t管的底口?‘o№删f&体连通恒f*删陂 似进^【I|II最昔:¨’,浮于的密度90川、 T触目哺体的密嘘.JL汗子具备托惭蚀 忡;其。,抟c*环_胛丁^选有利于起} *i川nⅡ“抖;】lH,Ⅲl量管录I¨抗腐蚀 忡蝗的十诱钢村料. 囤1臆理犀 3硬件原理电路 牟系统纳简嘤碰什}b路¨RI!.性自f 和拄牧Ⅻ什电路目ⅢIM1s11趟■胜々… 鞋成oI_l。M1sl二硅种既能K进《能 接性超声波的0H呆¨』适块鞋戍,,l以简 ft№m“牿提高{统的一,J稚性。0l-内 郫乜拈:胩f-p州制c生妊落#,,*增& 接收∞,脉冲啁,¨拴删#啭自抑制≈, ‘j8%【☆j自电。Fn、f.1MI812处于发时 模式.箱】符嘟外拄c1lik亡m瞎的世蚶 矗摊投的[怍撷牛LlCI扳蒿增蚰被憾为 振荡醺走,振荡信≈!{驱r女坡★后,M13管 wⅡ6管脚输m。 ’_8管Ⅷ为Ⅱl“平时.iMl8l!处于 拉收懊文,趣声踺1々媾g摇收“连日的衄 市披1j号%电彝耦仟…4符脚输^再经 内郫哺级般^艘凡岳的f;}轴U】管删 的喈扳日路取出的竹母起送剑幢删£. 目时竹檗F一也披捡删,-4“通过l7管W外 接的电料进行滤眭。’1管M【L的电Ⅲ盘 拜小州*能触牲怪Ⅻ蝌祝j,器&蜒蚓簋 T转¥”IⅢ” 圉3主程序流程圈 图2简要磋件电路目
超声波测距及红外避障小车的设计 发表时间:2018-06-11T11:51:58.193Z 来源:《电力设备》2018年第1期作者:赵勇柳青张腾文 [导读] 摘要:介绍一种超声波测距及红外避障小车的设计,根据功能需求,进行系统方案设计,进而进行系统模块设计。 (沈阳理工大学信息科学与工程学院辽宁沈阳 110159) 摘要:介绍一种超声波测距及红外避障小车的设计,根据功能需求,进行系统方案设计,进而进行系统模块设计。本小车将超声波测距和红外避障结合起来,增加了系统的可实现性。 关键词:超声波测距;红外避障;小车;设计 概论 在当今世界,复杂的环境不断对科技提出越来越高的要求,要求我们探寻更为合适的技术来适应复杂环境的变化。超声波测距因其可以直接测量近距离目标,纵向分辨率高,适用范围广,方向性强,并具备不受光线、烟雾、电磁干扰等因素影响,且覆盖面积大等优势被广泛应用;红外避障则是通过检测红外光遇到障碍物反射来感知障碍物的存在,反馈至控制器,单片机进行驱动报警以有效避障。本智能小车将超声波测距技术和红外避障技术相结合,为现代智能化生活中,非接触特殊环境下的探测及测距、安全保护、车载倒车等提供可靠、实时有效的保障。 1.功能需求 该超声波测距及红外避障小车将测距功能和避障功能相结合,在获得距离信息的基础上进行有效避障,并将距离显示在LCD1602液晶显示屏上,当距离小于一定数值时,小车将转向。小车使用电机进行驱动,采用AT89S52单片机作为核心控制器进行有效控制。 2.系统方案设计 本智能小车由超声波测距系统、温度补偿系统、摄像头传输系统、红外避障系统、WIFI系统、显示系统六部分组成。小车的运行由AT89S52芯片作为核心控制器,测距和红外避障由超声波传感器和红外传感器进行数据采集,显示系统部分由LCD1602液晶显示屏来完成,温度传感器采集外界环境温度进行温度补偿,摄像头和WIFI模块完成画面的传输和设备的控制,如图1所示。 图1 系统硬件组成 3.系统模块设计 3.1超声波测距模块 本小车设计的测距系统采用脉冲回波法测距,以AT89S52芯片为核心,通过超声波传感器发射超声波,在发射时刻的同时计数器开始计时,超声波在空气中碰到障碍物面阻挡就立即反射回来,超声波接收器收到返回波时就立即停止计时。如果设超声波的传播速度为计时器记录的时间为,可计算出发射距离障碍物面的距离,即 3.2温度补偿模块 温度补偿模块主要是对温度进行补偿,以减小测距误差。温度传感器主要运用的是DS18B20。每次温度测量前,首先会将温度寄存器和低温度系数振荡器预置-55℃所对应的基数值,而高温度系数振荡器会根据环境温度确定一个振荡周期。然后,低温度系数振荡器开始振荡,对应的计数器对振荡脉冲进行减计数,直到计数器中被预置的值减为0。此时,温度寄存器的值加1,而低温度系数振荡器的值重新被预置到-55℃所对应的基数值,如此重复直到高温度系数振荡器停振,此时,温度寄存器的值就是所要测的温度值。 3.3摄像头和WIFI模块 摄像头将道路实时画面传输到手机或PC等终端设备上,操作者可以直观地了解到道路信息。通过手机或PC上的WIFI与在小车上的WIFI模块相协同,可以在手机或PC端控制小车的前进、后退、拐弯等动作,该系统便于灵活控制小车动作、易于操作。 3.4红外避障模块 避障传感器利用物体的反射性质来实现避障功能。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失;如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头,传感器检测到这一信号,确认正前方有障碍物,并将信号传给单片机,单片机对信号进行系统的处理分析,从而协调小车两轮工作,完成躲避障碍物的动作。 3.5显示模块 将测得的温度和距离通过传感器送入到单片机中进行处理,将处理后的结果显示在液晶上,可以直观地读出温度和距离参数,使参数可视化,便于实时监测测距精度。
高精度超声波测距系统设计。 引言 利用超声波测量距离的原理可简单描述为:超声波定期发送超声波,遭遇障碍物时发生反射,发射波经由接收器接收并转化为电信号,这样测距技术只要测出发送和接收的时间差, 然后按照下式计算,即可求出距离: 由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求, 因此,广泛应用于倒车提醒、建筑工地、工业现场等的距离测量。目前的测距量程上能达到百米数量级,测量的精度往往能达到厘米数量级。本文在分析现有超声波测距技术基础之上, 给出了一种改进方案,测量精度可达毫米级。 2 系统方案分析与论证 2.1 影响精度的因素分析 根据超声波测距式(1)可知测距的误差主要是由超声波的传播速度误差和测量距离传播 的时间误差引起的。 对于时间误差主要由发送计时点和接收计时点准确性确定,为了能够提高计时点选择的准确性,本文提出了对发射信号和加收信号通过校正的方式来实现准确计时。此外,当要求测距误差小于 1 mm时,假定超声波速度C=344 m/s(20℃室温),忽略声速的传播误差。则测距误差s△t<0.000 002 907 s,即2.907 ms。根据以上过计算可知,在超声波的传播速度是准确的前提下,测量距离的传播时间差值精度只要在达到微秒级,就能保证测距误差小于1 mm的误差。使用的12 MHz晶体作时钟基准的89C51单片机定时器能方便的计数到1μs的精度,因此系统采用AT89S51的定一时器能保证时间误差在 1 mm的测量范围内。
基于行为设计的自主式小型机器鼠系统研究 学生:谢群指导老师:周伦 单位:机械工程学院机械工程与自动化2003级 摘要 移动机器人是近年来发展起来的一门综合学科,集中了机械、电子、计算机、自动控制以及人工智能等多学科最新研究成果,代表了机电一体化的最高成就。移动机器人在工业生产中常用来完成运输和上下料等任务,同时也被广泛用于农业、医疗等不同行业。 在移动机器人相关技术研究中,路径规划技术是一个重要研究领域[17]。本文首先初步讨论总结了目前主要的路径规划技术。从基于事例、基于环境模型和基于行为三个方面全面而系统地综述了移动机器人路径规划技术的研究现状,对于目前普遍采用的路径规划方法及其实际应用情况进行了较为详细介绍和分析。 基于行为的方法是由MIT的Brooks在他著名的包容式结构[42]中建立,它是一门从生物系统得到启发,而产生的用来设计自主机器人的技术,也是本文所重点研究的目标。它采用类似动物进化的自底向上的原理体系,尝试从简单的智能体来建立一个复杂的系统。将其用于解决移动机器人路径规划问题是一种新的发展趋势,它把导航问题分解为许多相对独立的行为单元,比如跟踪、避碰、目标制导等。这些行为单元是一些由传感器和执行器组成的完整的运动控制单元,具有相应的导航功能,各行为单元所采用的行为方式各不相同,这些单元通过相互协调工作来完成导航任务。 基于行为的机器人学反对抽象的定义, 因此采用具体化的解释更适合该领域的哲学思想。基于行为的机器人学的重要研究内容是系统结构而不是算法, 基于行为设计的机器人在非结构化动态环境中的性能非常优越,用基于符号的机器人学设计的类似机器人无法达到如下性能: a.高速度,高灵活性。在动态复杂环境中的移动速度很快; b.高鲁棒性。可以承受局部损坏; c.高效性。软件代码可以是传统的几百分之一,硬件可以是传统的几十分之一; d.经济性。价格是传统的十几分之一; e.可扩展性。很少改变原有系统便可增加性能; f.可靠性。分布式自组织并行工作,可靠性强。 为进一步研究基于行为的规划方法,而引入一个真实环境及任务模型,即IEEE每年举办的微型机器鼠比赛,通过设计基于行为的机器鼠模型论证该算法的可行性。此项比赛要求机器人能
智能超声波避障小车 姓名: 班级: 学号:
目录 摘要 (3) 一、总体方案概述 (3) 二、总体电路原理图 (3) 三、各模块功能介绍 (4) (一)、超声波测距模块 (4) (二)、步进电机控制模块 (5) (三)、单片机控制模块 (6) 四、系统软件设计 (6) 五、应用前景 (7) 六、参考文献 (8)
摘要: 现今发达的交通在给人们带来便捷的同时也带来了许多的交通事故。 发生交通事故的因 素有很多。 当然,如果我们的汽车能够更加智能,就是说事先能预测并显示前面障碍物离车的距离,当障碍物距离很近时汽车会自动采取一些措施避开障碍物,这样就能够在很大程度上避免这些事故的发生。在本论文中,我们将会看到能够实现这一功能的智能小车。 关键字:超声波、测量、避障、单片机 一、总体方案概述 本小车使用一台AT89S51单片机作为主控芯片,它通过超声波测距来获取小车距离障碍物的距离,并且用数码管实时的显示出来,在小车与障碍物的距离小于安全距离(用软件设定)时,小车会发出“在距您车前方x(数码显示的实时距离)米的地方有一障碍物,请您注意避让”的语音提示,并且拐弯,以避开障碍物,同时会点亮相应侧边的发光二极管作为提示信号。在避开障碍物后,小车会沿直线前进。 本系统设计的简易智能小车分为几个模块:单片机控制系统、超声波路面检测系统、前进、转弯控制电机以及方向指示灯系统。它们之间的相互关系如下图1所示。 二、总体电路原理图 图1:智能小车简要原理框架图
三、各模块功能介绍 (一)、超声波测距模块 首先利用单片机输出一个40kHz的触发信号,把触发信号通过TRIG管脚输入到超声波测距模块,再由超声波测距模块的发射器向某一方向发射超声波,在发射时刻的同时单片机通过软件开始计时,超声波在空气中传播,途中碰到障碍物返回,超声波测距模块的接收器收到反射波后通过产生一个回应信号并通过ECHO脚反馈给单片机,此时单片机就立即停止计时。时序图如图1所示。由于超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离,即:S=VT/2,通过单片机来算出距离。 图1:超声波模块时序图
(一)题目 超声波测距系统设计 (二)内容及要求 1)设计内容 采用40KHz的超声波发射和接收传感器测量距离。可采用发射和接收之间的距离,也可将发射和接收平行放在一起,通过反射测量距离。 功能:1)LCD液晶显示测量距离,精确到小数点后一位(单位:cm)。 2)测量方式可通过硬件开关预置。 3)测量范围:30cm~200cm, 4)误差<0.5cm。 5)其它。 2)设计要求 1)掌握传感器的工作原理及相应的辅助电路设计方法。 2)独立设计原理图及相应的硬件电路。 3)设计说明书格式规范,层次合理,重点突出。并附上详细的原理图。(三)传感器工作原理 超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差t,然后求出距离S=Ct/2,式中的C为超声波波速。由于超声波也是一种声波,其声速C与温度有关,表1列出了几种不同温度下的声速。在使用时,如果温度变化不大,则可认为声速是基本不变的。如果测距精度要求很高,则应通过温度补偿的方法加以校正。声速确定后,只要测得超声波往返的时间,即可求得距离。这就是超声波测距仪的机理。 (四)系统框图 图1 超声波测距系统框图 (五)单元电路设计原理
1、AT89C2051的功能特点 AT89C2051是一个2k字节可编程EPROM的高性能微控制器。它与工业标准MCS-51的指令和引脚兼容,因而是一种功能强大的微控制器,它对很多嵌入式控制应用提供了一个高度灵活有效的解决方案。AT89C2051有以下特点:2k字节EPROM、128字节RAM、15根I/O线、2 个16位定时/计数器、5个向量二级中断结构、1个全双向的串行口、并且内含精密模拟比较器和片内振荡器,具有4.25V至5.5V的电压工作范围和12MHz/24MHz工作频率,同时还具有加密阵列的二级程序存储器加锁、掉电和时钟电路等。此外,AT89C2051还支持二种软件可选的电源节电方式。空闲时,CPU停止,而让RAM、定时/计数器、串行口和中断系统继续工作。可掉电保存RAM的内容,但可使振荡器停振以禁止芯片所有的其它功能直到下一次硬件复位。 AT89C2051有2个16位计时/计数器寄存器Timer0t Timer1。作为一个定时器,每个机器周期寄存器增加1,这样寄存器即可计数机器周期。因为一个机器周期有12个振荡器周期,所以计数率是振荡器频率的1/12。作为一个计数器,该寄存器在相应的外部输入脚P3.4/T0和P3.5/T1上出现从1至0的变化时增1。由于需要二个机器周期来辨认一次1到0的变化,所以最大的计数率是振荡器频率的1/24,可以对外部的输入端P3.2/INT0和P3.3/INT1编程,便于测量脉冲宽度的门。 图2 ATC2051示意图 2、LCD的工作原理 在两片玻璃基板上装有配向膜,所以液晶会沿着沟槽配向,具有偶极矩的液晶棒状分子在外加电场的作用下其排列状态发生变化,使得通过液晶显示器件的光被调制,从而呈现明与暗或透过与不透过的显示效果。液晶显示器件中的每个显示像素都可以单独被电场控制,不同的显示像素按照控制信号的“指挥”便可以在显示屏上组成不同的字符、数字及图形。因此建立显示所需的电场以及控制显示像素的组合就成为液晶显示驱动器和液晶显示控制器的功能。 LCD器件是由背光源发射的光通过偏振片和液晶盒时,控制投
? 197 ? ELECTRONICS WORLD?技术交流 移动机器人控制系统设计 广东工业大学 侯晓磊 随着移动机器人在人们社会生活中的地位不断提高,设计一种 可靠、稳定的机器人控制系统越发的变得重要起来,以NI公司的MyRIO控制器以其安全可靠、编程开发简单而脱颖而出。本文基于上述控制器、L298N电机驱动芯片Labview设计一种移动机器人控制软硬件系统系统,经验证,该系统运行稳定、可靠、高效。 1.前言 新一轮科技革命引发新一轮产业革命。“互联网+制造”构建工业4.0,智能制造成为我国由制造大国向制造强国转变的关键一步,移动机器人作为智能制造中的一个组成部分,作用越发的变得举足轻重。本文给出一种以MyRIO+L298N+Labivew的移动机器人控制系统。 2.IN MyRIO控制器 NI myRIO是NI最新设计的嵌入式系统设计平台。NI myRIO中内含双核ARM Cortex-A9,实时性高,并且还可以便捷定制FPGA I/ O,给开发设计人员提供更好的设计复杂系统的平台。 NI myRIO作为可重配置控制器具有以下重要特点: 易于上手使用:引导性安装和启动界面可使开发人员更快地熟悉操作,协助开发人员快速了解工程概念,完成设计任务。编程设计简单,利用实时应用、内置WiFi等功能,开发人员可以实现远程部署应用,“无线”操控。 板载资源众多:有丰富的数字I/O接口,提供SPI串行外设接口、PWM脉宽调制输出端口、正交编码器输入端口、UART异步收发器端口和I2C总线接口、多个单端模拟输入、差分模拟输入和带参考的模拟输入等可供选择的资源。 另外,NI MyRIO还提供可靠性能较好的控制器保护电路,防止由于意外操作造成控制器不可恢复性损坏,总之,NI MyRIO为开发人员提供了一个编程简易,设计电路方便,不用刻意担心意外操作而影响控制器使用的平台。 3.L298N电机控制芯片 L298N是一种用来驱动电机的集成电路,可以较稳定的输出平稳电流和较强的功率。工作均电流为2A,最高可达4A,最高输出电压为50V,能够带动带有感性元件的负载。控制器可以直接通过输入输出口与电机驱动芯片联接,从而方便控制驱动芯片的输出。如将芯片驱动直流电机时,可以直接与步进电机相联接,通过调节控制器输出实现步进电机的的正反转功能当控制直流电机时,可以通过调节控制芯片的电压信号的极性,PWM波的占空比,从而实现直流电机转速和转向的调节。4.系统硬件部分设计 系统采用MyRIO整体框架,外围增设电机驱动电路、避障驱动电路、里程计电路、液晶显示电路、陀螺仪电路。通过MyRIO主控制发送控制信号驱动移动机器人运动,实时通过外围传感器获取位置信息反馈给主控制 器,然后控制器通过闭环系统调节当前位置以保证对目标位置的追踪。 图1 5.系统软件部分设计 系统软件部分采用经典控制理论的闭环控制系统,将电机、主控制器和外设传感器构成闭环系统,通过调节闭环统的参数,来使 移动机器人以较小偏差追踪按照预定轨迹。 图2 6.结束语 本文介绍了基于NI MyRIO控制器设计移动机器人控制系统,通过仿真和实物测试,能较好的完成对任务的追踪踪。 参考:From Student to Engineer:Preparing Future Innova-tors With the NI LabVIEW RIO Architecture https://www.doczj.com/doc/2a16319137.html,.2014-04-01;王曙光,袁立行,赵勇.机器人原理与设计.人民邮电出版社,2013 。
本科毕业设计(论文) 题目:(中文)基于向量场直方图的移动机器人避 障方法研究 (英文)STUDY OF OBSTACLE AVOIDANCE FOR THE MOBILE ROBOT BASED ON VECTOR FIELD HISTOGRAM
诚信承诺 我谨在此承诺:本人所写的毕业论文《基于向量场直方图的移动机器人避障方法研究》均系本人独立完成,没有抄袭行为,凡涉及其他作者的观点和材料,均作了注释,若有不实,后果由本人承担。 承诺人(签名): 年月日
基于向量场直方图的移动机器人避障方法研究 摘要 【摘要】移动机器人广泛应用于工业生产加工制造中,尤其在危险和恶劣的环境中可以用机器人代替人工操作减少损失。避障技术在移动机器人的发展中起着至关重要的作用,避障方法有很多种,本文是基于向量场直方图的移动机器人避障方法。由于传统的向量场直方图法在给定值太大或太小时都无法安全避障,本文在此基础上,利用激光测距仪所或得的数据首先确定一个可以安全行驶的范围,然后通过算法自动的改变给定值的大小,最终选择最优给定值,通过差分驱动控制使机器人安全避障。并在Robotic Studio仿真系统中建立场景和编程来实现。 【关键词】移动机器人;激光测距仪;向量场直方图;差分驱动;避障
STUDY OF OBSTACLE A VOIDANCE FOR THE MOBILE ROBOT BASED ON VECTOR FIELD HISTOGRAM Abstract 【ABSTRACT】Mobile robots are widely used in industrial production and manufacturing,especially in dangerous and harsh environments they can replace manual operations to reduce losses. Obstacle avoidance technology plays a vital role in the development of mobile robot , There are many ways about obstacle avoidance, this article is the obstacle avoidance method for mobile robot based on the vector field histogram.If the given value is too large or too small the robot can not go through obstacles safely using traditional vector field histogram method. Basing on the VFH, firstly ,determining a range of safe driving use the data from laser range finders.Then changing the given value automatically and choosing the optimal value , finally using the differential drive control method make the robot avoid obstacles successfully.And make it come ture in the Robotic Studio simulated system. 【KEYWORDS】mobile robot;LRF;VFH ; differential drive; obstacle avoidance