基于标记点检测的视线跟踪注视点估计
龚秀锋,李 斌,邓宏平,张文聪
(中国科学技术大学电子科学与技术系,合肥 230027)
摘 要:传统的头戴式视线跟踪系统需要借助额外的头部位置跟踪器或其他辅助设备才能定位视线方向。针对该问题,提出一种基于标记点检测的注视点估计方法。该方法通过计算机视觉的方法检测标记点,建立场景图像与真实场景中计算机屏幕之间的空间关系,将场景图像中的注视点坐标映射到计算机屏幕中。实验结果表明,该方法简单易行,可以较好地估计出用户在真实场景中的注视点坐标。 关键词:视线跟踪;注视点估计;头戴式视线跟踪系统;标记点检测
Eye Tracking Gaze Estimation Based on Marker Detection
GONG Xiu-feng, LI Bin, DENG Hong-ping, ZHANG Wen-cong
(Department of Electronic Science and Technology, University of Science and Technology of China, Hefei 230027, China)
【Abstract 】For head-mounted eye gaze tracking, additional head position sensors is needed to determine the gaze direction, a new method based on marker detection is proposed to estimate the gaze of point for head-mounted system in this paper. The markers are detected by computer vision method, and the relationship between scene image and computer screen is constructed with point correspondences in two views. The point of gaze in the scene image is translated to computer screen coordinate. Experimental result shows that this method can estimate the point of gaze in real scene easily irrespective of user’s head position.
【Key words 】eye tracking; gaze estimation; head-mounted eye tracking system; marker detection DOI: 10.3969/j.issn.1000-3428.2011.06.100
计 算 机 工 程 Computer Engineering 第37卷 第6期
V ol.37 No.6 2011年3月
March 2011
·开发研究与设计技术· 文章编号:1000—3428(2011)06—0289—02文献标识码:A
中图分类号:TP391
1 概述
视线跟踪系统是通过视频设备监控眼球运动状态,估计眼睛的视线方向或注视点的设备。眼睛的视线方向或注视区域通常反映了人感兴趣或引起注意的内容,因此,视线是一种非常好的人机交互输入通道[1]。近些年来,视线跟踪技术作为人机交互接口已经引起国内外广泛的研究。
头戴式视线跟踪系统是将眼部摄像头和场景摄像头等硬件固定在头盔或者镜架上,允许用户头部自由活动的一类视线跟踪设备。头戴式视线跟踪系统提供的注视点坐标是位于场景摄像机的像平面内而不是在真实场景中,用户不能直接与真实场景交互。一般情况下,头戴式视线跟踪系统需要配合头部姿态定位仪才能准确定位视线方向。如文献[2]采用在头顶固定一个磁感应器检测头部位置。采用附加头部位置跟踪装置的方法,不仅增加了系统的复杂度,也会将头部定位的误差引入系统中,降低系统的精度。
本文提出一种基于计算机视觉的标记点检测的头戴式视线跟踪系统注视点估计方法。在位于场景中的计算机屏幕四周设置若干标记点,实时检测场景图像中标记点的坐标位置,并与标记点在屏幕中的坐标组成点对应,利用射影变换技术建立场景图像与计算机屏幕之间的映射关系,通过该映射关系将注视点在场景图像中的坐标转化成在计算机屏幕中的坐标,最终计算出用户在真实场景中的注视点。
2 头戴式视线跟踪系统模型
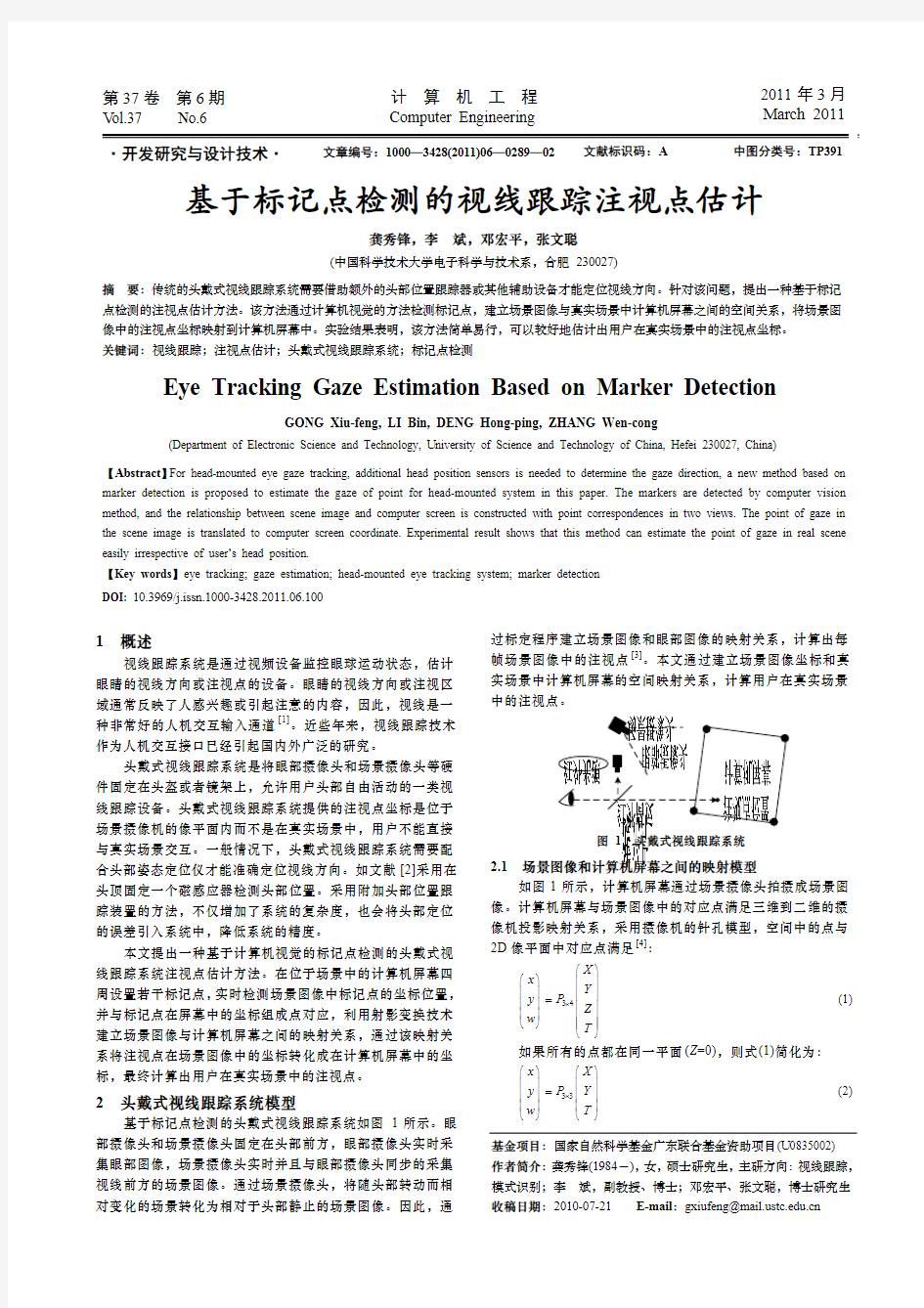
基于标记点检测的头戴式视线跟踪系统如图1所示。眼
部摄像头和场景摄像头固定在头部前方,眼部摄像头实时采集眼部图像,场景摄像头实时并且与眼部摄像头同步的采集
视线前方的场景图像。通过场景摄像头,将随头部转动而相对变化的场景转化为相对于头部静止的场景图像。因此,通
过标定程序建立场景图像和眼部图像的映射关系,计算出每帧场景图像中的注视点[3]。本文通过建立场景图像坐标和真实场景中计算机屏幕的空间映射关系,计算用户在真实场景
图 1 头戴式视线跟踪系统
2.1 场景图像和计算机屏幕之间的映射模型
如图1所示,计算机屏幕通过场景摄像头拍摄成场景图像。计算机屏幕与场景图像中的对应点满足三维到二维的摄像机投影映射关系,采用摄像机的针孔模型,空间中的点与2D 像平面中对应点满足[4]:
34X x Y y P Z w T ×??
????????
=????????????
??
(1) 如果所有的点都在同一平面(Z =0),则式(1)简化为:
33x X y P Y w T ×????????
=????????????
(2) 基金项目:国家自然科学基金广东联合基金资助项目(U0835002) 作者简介:龚秀锋(1984-),女,硕士研究生,主研方向:视线跟踪,模式识别;李 斌,副教授、博士;邓宏平、张文聪,博士研究生 收稿日期:2010-07-21 E-mail :gxiufeng@https://www.doczj.com/doc/2911330139.html,
290 计 算 机 工 程 2011年3月20日
在本文的应用环境中,所处理的点都在同一平面内(计算机屏幕内),计算机屏幕上的点'i X 和对应的场景图像中的点
i X 满足:
33'i i X H X ×= (3)
2.2 注视点估计方法
通过采集4组不同的对应点,利用射影变换技术可求得场景图像与计算机屏幕的映射关系。具体步骤如下:
(1)在计算机屏幕四周或软件窗口四角设置4个蓝色圆形作为标记点。
(2)对每帧场景图像,利用标记点检测技术提取4个标记点的坐标,并建立场景图像中标记点坐标(),x y 与真实屏幕中标记点位置()','x y 间的点对应关系{}'?X X ,其中,
()T
,,1x y =X ,()T
'',',1x y =X ;与标记点在屏幕坐标系下的坐
标形成一组点对应。
(3)根据这些点对应关系,
利用直接线性变换(DLT)[4]实时计算出场景图像与真实屏幕间的映射关系H 。
(4)通过该映射关系,将视线在当前场景图像帧中的注视点坐标转化成真实屏幕中的坐标。
2.3 标记点检测
径向对称变换主要利用径向对称特性来突出具有圆对称性的区域,从而实现圆形目标的检测。径向对称变换的算法流程如图2所示[5]。
图2
径向对称算法流程
提取场景图像的蓝色通道,进行径向对称变换过程,如图3所示。
图3 标记点检测过程
3 实验结果及分析
在计算机屏幕中设置9点已知坐标的测试点。利用头戴式视线跟踪系统的场景图像拍摄一组视频,包含2 178帧图像,其中每个测试点包含242帧。对每一帧场景图像,通过标记点的检测,可以得到每帧场景图像的4个标记点的坐标,与在屏幕中的坐标建立点对应,利用射影变换技术计算出此时场景图像到真实屏幕的映射关系。然后,利用每帧场景图像中测试点对此时的映射关系进行评价,即比较通过映射变换求出在屏幕中测试点的坐标与实际坐标之间的误差距离。
err =
(4)
其中,(','x y 表示计算得到的映射点坐标;()
,x y
表示真实
屏幕中的测试点坐标。
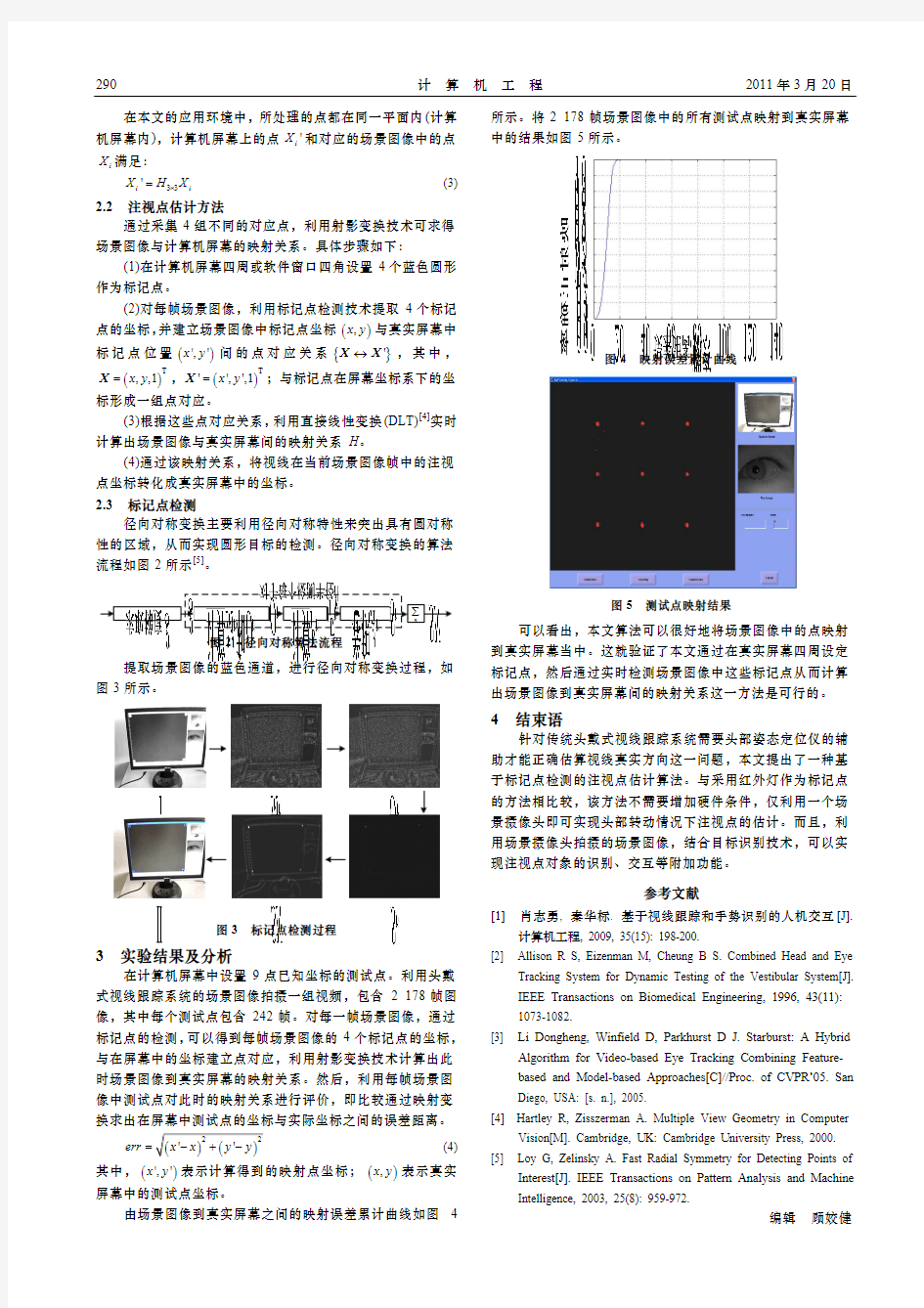
由场景图像到真实屏幕之间的映射误差累计曲线如图4
所示。将2 178帧场景图像中的所有测试点映射到真实屏幕中的结果如图5所示。
图4 映射误差累计曲线
图5 测试点映射结果
可以看出,本文算法可以很好地将场景图像中的点映射到真实屏幕当中。这就验证了本文通过在真实屏幕四周设定标记点,然后通过实时检测场景图像中这些标记点从而计算出场景图像到真实屏幕间的映射关系这一方法是可行的。
4 结束语
针对传统头戴式视线跟踪系统需要头部姿态定位仪的辅助才能正确估算视线真实方向这一问题,本文提出了一种基于标记点检测的注视点估计算法。与采用红外灯作为标记点的方法相比较,该方法不需要增加硬件条件,仅利用一个场景摄像头即可实现头部转动情况下注视点的估计。而且,利用场景摄像头拍摄的场景图像,结合目标识别技术,可以实现注视点对象的识别、交互等附加功能。
参考文献
[1] 肖志勇, 秦华标. 基于视线跟踪和手势识别的人机交互[J].
计算机工程, 2009, 35(15): 198-200.
[2] Allison R S, Eizenman M, Cheung B S. Combined Head and Eye
Tracking System for Dynamic Testing of the Vestibular System[J]. IEEE Transactions on Biomedical Engineering, 1996, 43(11): 1073-1082.
[3] Li Dongheng, Winfield D, Parkhurst D J. Starburst: A Hybrid
Algorithm for Video-based Eye Tracking Combining Feature- based and Model-based Approaches[C]//Proc. of CVPR’05. San Diego, USA: [s. n.], 2005.
[4] Hartley R, Zisszerman A. Multiple View Geometry in Computer
Vision[M]. Cambridge, UK: Cambridge University Press, 2000. [5] Loy G, Zelinsky A. Fast Radial Symmetry for Detecting Points of
Interest[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2003, 25(8): 959-972.
编辑 顾姣健
行人检测与跟踪国内外研究现状 1.2行人检测与跟踪国内外研究现状 视觉跟踪和目标检测是计算机视觉领域内较早开始的研究方向。经过几十年的积累,这两个方向已经取得了显著的发展。然而,很多方法只是在相对较好地程度上解决了一些关键问题。并且仍旧有不少一般性的关键问题未得到有效的解决。国内外很多研究机构都在致力于研究和发展这两个方向。近些年这两个方向持续发展,涌现了很多比较优秀的方法。国外的很多大学和研究机构(如卡内基梅隆大学、南加州大学和法国国家计算机科学与控制研究所等)都有计算机视觉小组,长期地研究视频跟踪和目标检测。国内的很多大学和研究所等(如清华大学、上海交大和自动化所等)也有相关的研究小组,并取得了一些优秀的研究成果。 1.2.1行人检测技术国内外研究现状 中科院计算机科学重点实验室孙庆杰等人利用基于侧影的人体模型及其对应的概率模型,提出了一种基于矩形拟合的人体检测算法。中科院自动化所谭铁牛等对人运动进行视觉分析,其核心是利用计算机视觉技术从图像序列中检测、跟踪、识别人并对其行为进行理解与描述,它主要应用在视觉监控领域和基于步态的身份鉴定。步态识别就是根据人们走路的姿势进行身份鉴定,依据人体行走运动很大程度上依赖于轮廓随着时间的形状变化的直观想法,提出一种基于时空轮廓分析的步态识别算法;基于行走运动的关节角度变化包含着丰富的个体识别信息的思想,提出一种基于模型的步态识别算法。实验结果表明该算法不仅获得了令人鼓舞的识别性能,而且拥有相对较低的计算代价。但是该方法只能检测出运动的行人。 西安交通大学郑南宁等研究了利用支持向量机识别行人的方法,通过稀疏Gabor滤波器提取行人样本图像中行人的特征,然后利用支持向量机来训练所提取的样本特征,并用训练得到的分类器通过遍历图像的方式将图像中可能属于行人的窗口提取出来。尽管用Gabor滤波器提取特征效果相对较好,但耗时很长,不适合于实时图像的处理。 上海交通大学田广等提出了一种coarse-to-fine的行人检测方法,将一个人建模成人体自然部位的组装,人体的所有部位包括头肩、躯干和腿、采用绝对值类Haar特征集和Edgelet特征集,在这些特征集上,采用softcascade训练各个部位的检测器和全身检测器。首先采用全身检测器在整个图像中产生候选行人区域,然后用基于贝叶斯决策的组合算法进一步确定候选区域中的行人。实验结果表明该算法有很好的检测性能能在杂乱的自然场景中有效的检测行人。但该方法的识别率是78.3%,识别率不高,且该模型比较难构建,模型求解也比较复杂。 目前,在国外许多文献中提出了基于机器视觉的行人检测方法,意大利帕尔玛大学的AlbertoBroggi教授在ARGO项目中采用一种基于外形的行人检测算法。算法首先根据行人相对于垂直轴有很强的垂直边缘对称性、尺寸和外貌比例等在
基于标记点检测的视线跟踪注视点估计 龚秀锋,李 斌,邓宏平,张文聪 (中国科学技术大学电子科学与技术系,合肥 230027) 摘 要:传统的头戴式视线跟踪系统需要借助额外的头部位置跟踪器或其他辅助设备才能定位视线方向。针对该问题,提出一种基于标记点检测的注视点估计方法。该方法通过计算机视觉的方法检测标记点,建立场景图像与真实场景中计算机屏幕之间的空间关系,将场景图像中的注视点坐标映射到计算机屏幕中。实验结果表明,该方法简单易行,可以较好地估计出用户在真实场景中的注视点坐标。 关键词:视线跟踪;注视点估计;头戴式视线跟踪系统;标记点检测 Eye Tracking Gaze Estimation Based on Marker Detection GONG Xiu-feng, LI Bin, DENG Hong-ping, ZHANG Wen-cong (Department of Electronic Science and Technology, University of Science and Technology of China, Hefei 230027, China) 【Abstract 】For head-mounted eye gaze tracking, additional head position sensors is needed to determine the gaze direction, a new method based on marker detection is proposed to estimate the gaze of point for head-mounted system in this paper. The markers are detected by computer vision method, and the relationship between scene image and computer screen is constructed with point correspondences in two views. The point of gaze in the scene image is translated to computer screen coordinate. Experimental result shows that this method can estimate the point of gaze in real scene easily irrespective of user’s head position. 【Key words 】eye tracking; gaze estimation; head-mounted eye tracking system; marker detection DOI: 10.3969/j.issn.1000-3428.2011.06.100 计 算 机 工 程 Computer Engineering 第37卷 第6期 V ol.37 No.6 2011年3月 March 2011 ·开发研究与设计技术· 文章编号:1000—3428(2011)06—0289—02文献标识码:A 中图分类号:TP391 1 概述 视线跟踪系统是通过视频设备监控眼球运动状态,估计眼睛的视线方向或注视点的设备。眼睛的视线方向或注视区域通常反映了人感兴趣或引起注意的内容,因此,视线是一种非常好的人机交互输入通道[1]。近些年来,视线跟踪技术作为人机交互接口已经引起国内外广泛的研究。 头戴式视线跟踪系统是将眼部摄像头和场景摄像头等硬件固定在头盔或者镜架上,允许用户头部自由活动的一类视线跟踪设备。头戴式视线跟踪系统提供的注视点坐标是位于场景摄像机的像平面内而不是在真实场景中,用户不能直接与真实场景交互。一般情况下,头戴式视线跟踪系统需要配合头部姿态定位仪才能准确定位视线方向。如文献[2]采用在头顶固定一个磁感应器检测头部位置。采用附加头部位置跟踪装置的方法,不仅增加了系统的复杂度,也会将头部定位的误差引入系统中,降低系统的精度。 本文提出一种基于计算机视觉的标记点检测的头戴式视线跟踪系统注视点估计方法。在位于场景中的计算机屏幕四周设置若干标记点,实时检测场景图像中标记点的坐标位置,并与标记点在屏幕中的坐标组成点对应,利用射影变换技术建立场景图像与计算机屏幕之间的映射关系,通过该映射关系将注视点在场景图像中的坐标转化成在计算机屏幕中的坐标,最终计算出用户在真实场景中的注视点。 2 头戴式视线跟踪系统模型 基于标记点检测的头戴式视线跟踪系统如图1所示。眼 部摄像头和场景摄像头固定在头部前方,眼部摄像头实时采集眼部图像,场景摄像头实时并且与眼部摄像头同步的采集 视线前方的场景图像。通过场景摄像头,将随头部转动而相对变化的场景转化为相对于头部静止的场景图像。因此,通 过标定程序建立场景图像和眼部图像的映射关系,计算出每帧场景图像中的注视点[3]。本文通过建立场景图像坐标和真实场景中计算机屏幕的空间映射关系,计算用户在真实场景 图 1 头戴式视线跟踪系统 2.1 场景图像和计算机屏幕之间的映射模型 如图1所示,计算机屏幕通过场景摄像头拍摄成场景图像。计算机屏幕与场景图像中的对应点满足三维到二维的摄像机投影映射关系,采用摄像机的针孔模型,空间中的点与2D 像平面中对应点满足[4]: 34X x Y y P Z w T ×?? ???????? =???????????? ?? (1) 如果所有的点都在同一平面(Z =0),则式(1)简化为: 33x X y P Y w T ×???????? =???????????? (2) 基金项目:国家自然科学基金广东联合基金资助项目(U0835002) 作者简介:龚秀锋(1984-),女,硕士研究生,主研方向:视线跟踪,模式识别;李 斌,副教授、博士;邓宏平、张文聪,博士研究生 收稿日期:2010-07-21 E-mail :gxiufeng@https://www.doczj.com/doc/2911330139.html,
课时跟踪检测(十六) 人口迁移 地域文化与人口 一、选择题 (2013·崇雅模拟)下表为“美国1965~1983年不同地区的净移民人口数量表(单位:千人)”。读表回答1~2题。 1.与此时期美国人口迁移特点不符的是( ) A .70年代东北部地区迁出人口多于迁入人口 B .70年代以后,南部地区一直是人口迁入地区 C .80年代以后,东北部地区由人口迁出地区变为人口迁入地区 D .80年代以后,迁往“阳光地带”的人口数量明显减少 2.导致此时期美国地区间人口迁移的主要原因是( ) A .环境质量的变化 B .地区间气候差异 C .经济收入的变化 D .经济结构的调整 (2013·济南调研)下图为“某地人口迁移与年龄关系示意图”。读图回答3~4题。 3.从图中判断,影响该地区人口迁移的主要因素最有可能是( ) A .人口老龄化 B .婚姻家庭 C .政治因素 D .经济因素 4.图中甲、乙、丙、丁不同年龄段的人口迁移有明显相关性的是( ) A .甲、乙 B .甲、丙 C .乙、丙 D .乙、丁 重男轻女指数是指希望生育男孩的母亲人数与希望生育女孩的母亲人数的比例,下表是
联合国人口机构2006年公布的部分国家的“重男轻女指数表”。读表回答5~6题。 A .韩国、泰国、菲律宾 B .菲律宾、泰国、尼泊尔 C .巴基斯坦、尼泊尔、韩国 D .哥伦比亚、肯尼亚、委内瑞拉 6.地域文化对人口的影响是通过影响人们的生育意愿而表现出来的。下列叙述正确的是( ) A .“男孩偏好”的传统与“稻米文化”密切相关 B .中国的儒家文化有“男性偏好”的传统思想,但重视子女的质量和注重自我发展 C .发达国家受基督教的影响,没有性别偏好 D .“重男轻女指数”反映发展中国家普遍渴望生育男孩 下图是“根据联合国于2000年发布的预测报告绘制的2001~2050年部分国家迁入人口趋势图”。读图完成7~8题。 7.关于人口迁移流向的叙述,正确的是( ) A .由人口多的国家迁往人口少的国家 B .由发展中国家迁往发达国家 C .全球迁出人口少于迁入人口 D .由东半球国家迁往西半球国家 8.下列关于人口迁移影响的叙述,正确的是( ) A .减轻了迁入地的就业压力 B .加重了迁出地的环境压力 C .为迁入地提供劳动力,促进经济发展
摘要:人们在观察外部世界时眼睛总是与其它人体活动自然协调地工作,并且眼动所需的认知负荷很低,人眼的注视包含着当前的任务状况以及人的内部状态等信息,因此眼注视是一 种非常好的能使人机对话变得简便、自然的候选输入通道.本文介绍了视线跟踪的基本原理、方法,对视线跟踪作为人机交互通道所具有的特点进行了讨论,并指出了其在人机交互领域 中的应用及前景. 关键词:人机交互;视线跟踪;多通道用户界面 目前用户界面所使用的任何人机交互技术几乎都有视觉参与。早期的视线跟踪技术首先应用于心理学研究(如阅读研究),后被用于人机交互。眼动在人的视觉信息加工过程中,起着重要的作用。它有三种主要形式:跳动(Saccades), 注视(Fixations)和平滑尾随跟踪( Smooth Pursuit)。在正常的视觉观察过程中,眼动表现为在被观察目标上一系列的停留及在这停留点之间的飞速跳动,这些停留一般至少持续100ms以上,称为注视。绝大多数信息只有在注视时才能获得并进行加工。注视点间的飞速跳跃称为眼跳动。眼跳动是一种联合眼动(即双眼同时移动),其大小为1到40 度视角,持续时间为30到120ms,最高运动速度为400-600度/秒。 视线跟踪精度与在测量时对用户的限制和干扰就是一对矛盾.在多通道用户界面设计中,减少这种限制和干扰是非常重要的,视线作为交互装置最直接的用处就是代替鼠标器作为一种指点装置。 一、视线跟踪的基本原理、方法 视线跟踪技术及装置有强迫式(intrusiveness)与非强迫式(non-intrusiveness)、穿戴式与非穿戴式、接触式(如Eyeglass-mounted)与非接触式(Remote)之分;其精度从0.1°至1°或2°不等,制造成本也有巨大差异。在价格、精度与方便性等因素之间作出权衡是一件困难的事情,例如视线跟踪精度与对用户的限制和干扰就是一对尖锐的矛盾。有关视觉输入的人机界面研究主要涉及两个方面:一是视线跟踪原理和技术的研究;二是在使用这种交互方 式后,人机界面的设计技术和原理的研究. 眼睛能平滑地追踪运动速度为1到30度/秒的目标,这种缓慢、联合追踪眼动通常称为平滑尾随跟踪。平滑尾随跟踪必须有一个缓慢移动的目标,在没有目标的情况下,一般不能执行这种眼动。在人机交互中,主要表现为跳动和注视两种形式。而主要的视线跟踪技术方法如图所示:
山东建筑大学 课程设计说明书 题目:视频监控中行人的检测课程:数字图像处理课程设计院(部):信息与电气工程学院 专业:电子信息工程 班级:电信111 学生姓名: 学号: 指导教师: 完成日期:
目录 摘要 ............................................................................................................................................. II 一、绪论 (1) 1.1 研究背景与意义 (1) 1.2 智能视频监控概述 (2) 1.2.1 智能视频监控的发展 (2) 1.2.2 智能视频监控的研究内容 (3) 1.3 行人检测与跟踪 (3) 1.3.1 行人检测 (3) 1.3.2 行人跟踪 (4) 二、设计原理 (5) 2.1 图像处理基础 (5) 2.1.1 颜色空间 (5) 2.1.2 图像预处理 (7) 2.1.3 形态学方法 (7) 2.2 运动目标检测方法 (8) 2.2.1 背景差分法 (8) 2.2.2光流法 (9) 2.2.3边缘检测方法 (10) 2.4 本章小结 (10) 三、设计内容 (11) 3.1背景减法运动目标检测 (11) 3.2阈值的选取 (11) 3.3形态学滤波 (12) 3.4设计方案流程图 (14) 四、实验结果分析及总结 (16) 4.1试验结果 (16) 4.2实验结果分析 (16) 五、参考文献 (17) 致谢 (18) 附录 (19)
摘要 智能视频监控是计算机视觉领域新兴的研究方向,它通过对摄像机拍摄的视频图像序列进行自动分析来对被监控场景中的事物变化进行定位、跟踪和识别,并以此对相关目标的行为进行分析和判别,在实现了日常管理工作的同时又能对目标的异常行为做出及时反应。行人目标检测与跟踪算法是智能视频监控系统中的核心问题,研究相关算法对于提高智能视频监控系统的性能具有重要的意义。本文在熟悉和掌握了有关数字图像处理原理和技术的基础上,分析对比了常用的目标检测和跟踪方法,针对不同条件下的行人目标检测和跟踪进行了研究。本文完成的主要研究工作是对监控视频中行人目标的检测,为以后的行人跟踪和行人行为的分析打下基础。 本设计以Matlab为平台,利用背景减法,和形态学滤波的方法检测视频中的行人。实验结果表明,本模块能够检测一般静态背景条件下的行人目标,满足了实际应用的初步要求。 关键词:视频监控、行人检测、背景减法、形态学滤波
课时跟踪检测(五十六)物质的检验 1.下列实验可实现鉴别目的的是() A.用KOH溶液鉴别SO3(g)和SO2 B.用湿润KI-淀粉试纸鉴别Br2(g)和NO2 C.用CO2鉴别NaAlO2溶液和CH3COONa溶液 D.用BaCl2溶液鉴别AgNO3溶液和K2SO4溶液 解析:选C SO2、SO3(g)均能与KOH溶液反应,都没有明显现象,A项错误。Br2(g)、NO2都是红棕色气体且有强氧化性,都能氧化KI而生成I2,使淀粉显蓝色,B项错误。 偏铝酸的酸性弱于碳酸,CO2通入NaAlO2溶液中生成Al(OH)3沉淀,醋酸酸性强于碳酸,CO2通入CH3COONa溶液无现象,C项正确。BaCl2溶液和AgNO3溶液反应生成AgCl 沉淀,BaCl2溶液和K2SO4溶液反应生成BaSO4沉淀,现象相同不能鉴别,D项错误。2.下列有关叙述正确的是() A.将木炭和浓硫酸在加热条件下反应生成的气体通入澄清石灰水中,有白色沉淀生成,该气体一定是CO2 B.能使品红溶液褪色的气体一定是SO2 C.某红棕色气体溶于水形成溶液,该气体一定是NO2 D.某物质燃烧后的产物既能使白色硫酸铜粉末变蓝,又能使澄清石灰水变浑浊,该物质可能是碳氢化合物 解析:选D木炭和浓硫酸在加热条件下反应可生成CO2和SO2,而SO2和CO2均可以使澄清石灰水变浑浊,A项错误;能使品红溶液褪色的气体可能是SO2,还可能为具有漂白性的其他气体,如Cl2等,B项错误;NO2、溴蒸气均为红棕色气体且溶于水均能形成溶液,C项错误;D项中的现象只能说明该物质一定含有碳、氢元素,则该物质既可能为碳氢化合物,也可能为含有碳、氢、氧元素的化合物,正确。 3.(2020·奉新模拟)已知:SO2-3+I2+H2O===SO2-4+2I-+2H+。某溶液中可能含有Na+、NH+4、K+、I-、SO2-3、SO2-4,且所有离子物质的量浓度相等。向该无色溶液中滴加少量溴水,溶液仍呈无色。下列关于该溶液的判断正确的是() A.肯定不含I-B.肯定含有SO2-4 C.肯定含有SO2-3D.肯定含有NH+4 解析:选C溶液中加入少量溴水,溶液仍呈无色,原溶液中一定有SO2-3;由方程式可知SO2-3的还原性比I-强,可能是SO2-3过量,溴水全部和SO2-3反应,说明溶液中可能
《商场现代化》2012年10月(下旬刊)总第699期图1视线跟踪技术图2视线信息人力资源 基于视线跟踪技术的职业素质测评模式 ■杜鹏 大连海洋大学文法学院 基金项目:国家自然基金课题(71072085);云南省教育厅科学研究课题(2011Y329);云南省哲学社会科学规划课题(QN201116);大连海洋大学教改项目课题(JG2011YB35) [摘要]如何有效客观测评员工职业素质,是当前国内外一个重要研究课题。本文首次创新性提出基于视线跟踪技术的职业素 质测评模式,该模式能客观的考察员工职业知识的掌握程度,而且能进一步测评被测试者的思维模式、 思维习惯等隐性的职业素质能力,这些信息能更加全面客观地测评员工的职业素质。本文的研究不论对今后职业素质测评模式研究还是对企业人员招聘,都有重要的理论及实际意义。 [关键词]视线跟踪职能能力视线信息环视线轨迹 职业素质(Professional Quality )是劳动者对社会职业了解与适 应能力的一种综合体现,主要包括职业兴趣、 职业素质、职业个性及职业情况等方面。影响和制约职业素质的因素很多,例如:受教育程度、实践经验、社会环境、工作经历以及自身的一些基本情况。职业素质测评:是指测评主体从特定的人力资源管理目的出发,运用各种测量技术,收集受测人在主要活动领域中的表征信息,对人的素质进行 全面系统的评价,以求对人有客观、 全面、深入的了解,从而为人力资源开发和管理提供科学的决策依据。 目前的测评方法主要有:1.公文筐测验:是对实际工作中管理人员掌握和分析资料、处理各种信息以及做出决策的工作活动的抽象和集中。2.无领导小组讨论:是评价中心常用的一种无角色群体自由讨论的测评形式。3.管理游戏:在这种测评中,各位被试人置身于一个模拟的环境中,面临一些管理中常常遇到的各种现实问题,并被分配一定的任务,但这些问题必须合作才能较好地完成。4.角色扮演:在这种测评活动中,主试人设置了一系列尖锐的人际矛盾与人际冲突,要求被试者扮演某一角色并进入角色情境去处理各种 问题和矛盾。 以上方法比较有效的测评被测试了人员的职业素质能力,但是目前很多职前教育机构和培训机构为应对公司和企业对员工的职业素质的测评,为被测评者提供职业素质水平测评的题库和答案以及应对的技巧,使得这些职业素质能力测评在一定程度上失去客观性。 如何能有效的测评职业素质,是目前国内外非常关注研究的课题,而国内外目前研究方向多集中在测评题目的设定和心理学分析上,虽有了一定的成效,但没有突破原有的测评方法,效果一般。本文突破性地提出了基于视线跟踪技术的职能素质测评模式,该模式增加了测试信息的获得量并更大程度的保证了测试的客观性,而且这种测试方法能有效地规避职前教育机构和培训机构对测试人员的培训技巧。 一、视线跟踪技术 人类对外界信息获取过程中,信息摄取和辨析在很大程度上依赖视觉信息,约有80%~90%的外界信息通过人的眼睛获得。由于人的视线具有直接性、自然性和双向性等其它信息所无法具备的特点[1],使得视线信息在人类对各种信息的利用中具有更高的权重和信服性。 如图1所示视线跟踪技术是利用摄像技术、光学原理、图像处理、 三维建模等技术分析出观察者视线的轨迹并跟踪其变化,最终获得其中的各种视线信息。随着视线跟踪技术的逐步成熟,视线跟踪技术也开始应用的越来越广泛。例如警察的预审研判系统,医疗的心理咨询,商业的广告测评、货架排放测评,残疾人的视觉轮椅,交互功能的家用电器,虚拟现实和游戏等领域。 而本文创新性的首次将视线跟踪技术应用到了员工职业素质测评中,下文将详细论述在职业素质测评过程中,通过视线跟踪技术能获得的各种隐性信息以及这些信息对职业测评的作用。 二、职业素质测评中的隐性信息传统的职业素质测评方法中,通过测评的考题所能获得的信息有限,不能全面客观反应出被测试人员的职业素质能力,例如作弊或应用面试应 对技巧时,传统测评便不能反映员工 的职业素质。 职业素质测评中除答题信息外还 存在着很多隐性信息。 通过视线跟踪技术,获得被测试者测评过程中的各种视线变化信息,如图2所示,本文将这些信息分为视线信息环、视线轨迹信息、视线驻留时间信息。通过这些信息的数 据挖掘,可分析出被测评者在测评中的 思维模式,看问题的侧重点,观察事物的顺序等隐性信息。结合这些隐性信息就可客观全面反映出被测试者职业素质能力。 1.视线信息环。由于人眼的构造结构决定,人在观看事物时,不可能只观察一个点,而是以眼球的视轴为中心形成环形的信息面,我 们把这些环形的信息面称作视线信息环,如图2所示, 视线信息环的中心,观察者获得的信息较多,而从视线环中心越向外获得的信息越少。在职业素质测评中,我们可以通过分析被测评人员观察题目信息时的信息环,获得更多的职能能力测评信息,例如,如果在职能力测评中,被测评者在测评信息屏幕上视线留下各个信息环中,没有覆盖正确答案的信息环,可以说明被测评者在对题目的解答时可能是抄袭或者是随意蒙选。 2.视线驻留时间。人类在观察事物的过程行为中,表现出来的是眼球在一系列视线信息环上的停留以及在这些视线环上跳动,当在 视线环上的停留时间在100毫秒 (ms )以上时,人才能通过视觉观察事物获得外界信息。 我们通过视线跟踪技术,可以获得被测评人员在职业素质测评时,屏幕上留下每个视线环上的驻留时间,而通过对这些信息可以分析出被测评人员对特定信息的反应时间并协助判断测评人员对事物的关注点。 3.视线轨迹信息。注视点之间的飞速跳动称为眼球跳动。眼球的 跳动(saccades ) 由巴黎大学的Javal (1897)教授发现。例如在阅读文章或看一个物体时,人们往往认为自己的眼睛是沿着一行句子或图形的形状平滑地运动。事实上,我们的眼睛总是先在对象的一部分上停留一段时间,注视以后又跳到另一部分上,再对新的部分进行注 视。人眼在观察事物时眼球在视线信息环间的跳动,会形成移动的轨迹,我们把这样的轨迹信息称为视线轨迹信息。 在职业素质测评的过程中,我们可以通过对被测评人员观察事物的视线轨迹信息的分析,了解到被测评人员的思维模式,而对多个这种思维模式的分析可以了解到被测评人员的思维习惯。这些信息的获得,更加有利于员工职业素质的测评。 85
课时跟踪检测(十六) 从自然界获取铁和铜 1.下列说法中,不正确的是( ) A .金属的冶炼,就是利用氧化还原反应原理,在一定条件下将金属从其化合物中还原出来 B .冶炼金属时,必须加入一种物质作为还原剂 C .金属由化合态变为游离态,都是被还原 D .金属单质被发现和应用得越早,其活动性一般越弱 解析:选B 由金属冶炼的方法可知,金属冶炼时,除用高温还原法外,还可用电解法、热分解法,后两种方法不用加入还原剂,B 不正确。 2.下列化学反应在金属冶炼工业中还没有得到应用的是( ) A .2NaCl(熔融)=====电解 2Na +Cl 2↑ B .Al 2O 3+3 C =====2 125 ℃ 2Al +3CO↑ C .Fe 2O 3+3CO=====高温 2Fe +3CO 2 D .2Ag 2O=====△ 4Ag +O 2↑ 解析:选B 目前金属铝的制备方法是电解氧化铝,其他选项中所涉及的内容均符合理论和生产实际。 3.铝能用于冶炼金属铁、钒、铬、锰等,其原因是铝具有( ) A .两性 B .导电性好 C .熔点低 D .还原性强,且反应放出大量热 解析:选D 铝能用于冶炼金属铁、钒、铬、锰等,其原因一是铝比铁、钒、铬、锰等活泼,铝能把其置换出来;二是反应放出大量的热使反应得以进行,D 正确。 4.下列反应原理不符合工业冶炼金属实际情况的是( ) A .MgCl 2(熔融)=====电解 Mg +Cl 2↑ B .TiCl 4+4Na =====700~800℃ Ti +4NaCl C .Al 2O 3+3H 2=====△ 2Al +3H 2O
D .Fe 3O 4+4CO=====高温 3Fe +4CO 2 解析:选C 工业上用电解Al 2O 3的方法制取单质Al 。 5.从石器、青铜器到铁器时代,金属的冶炼体现了人类文明的发展水平。下图表示了三种金属被人类开发利用的大致年限,之所以有先后,主要取决于( ) A .金属的导电性强弱 B .金属在地壳中的含量多少 C .金属的化合价高低 D .金属的活动性强弱 解析:选D 人类对材料的使用经历了一个由易到难,由简单到复杂的过程,所以金属活动性较差、容易冶炼的金属最先被人发现和利用。 6.用H 2、C 、CO 分别与等质量的氧化铁在高温下反应,使氧化铁中的铁全部还原出来,消耗H 2、C 、CO 的质量比为( ) A .1∶1∶1 B .1∶3∶14 C .1∶6∶14 D .2∶1∶2 解析:选B 由3H 2~Fe 2O 3,32 C ~Fe 2O 3,3CO ~Fe 2O 3可知,相同的质量的氧化铁需要的还原剂的质量比为: (3×2)∶? ?? ??32×12∶(3×28)=1∶3∶14。 7.工业上,常用Mg 还原法制取金属Ti ,反应原理如下:2Mg +TiCl 4=====高温 2MgCl 2+Ti 。 下列说法正确的是( ) ①该反应属于置换反应;②该反应属于氧化还原反应; ③该反应表明Mg 比Ti 活泼;④Ti 被誉为“21世纪的金属”,在航天工业上有广泛用途。 A .只有①② B .只有③④ C .只有①②③ D .全部 解析:选D 由单质Mg 从化合物TiCl 4中置换出金属Ti ,化合价发生变化,故①②正确;在反应中Mg 作还原剂,Ti 是还原产物,故Mg 的还原性比Ti 强,③正确;④Ti 为性能优良的金属,广泛应用于航天工业,④正确。 8.用足量的CO 还原32.0 g 某种氧化物,将生成的气体通入足量澄清石灰水中,得到
机器视觉的辅助驾驶系统的视频中行人 实时检测识别研究文献综述 1机器视觉发展 国外机器视觉发展的起点难以准确考证,其大致的发展历程是:20世纪50年代提出机器视觉概念,20世纪70年代真正开始发展,20世纪80年代进入发展正轨,20世纪90年代发展趋于成熟,20世纪90年代后高速发展。在机器视觉发展的历程中,有3个明显的标志点,一是机器视觉最先的应用来自“机器人”的研制,也就是说,机器视觉首先是在机器人的研究中发展起来的;二是20世纪70年代CCD图像传感器的出现,CCD摄像机替代硅靶摄像是机器视觉发展历程中的一个重要转折点;三是20世纪80年代CPU、DSP等图像处理硬件技术的飞速进步,为机器视觉飞速发展提供了基础条件。 国内机器视觉发展的大致历程:真正开始起步是20世纪80年代,20世纪90年代进入发展期,加速发展则是近几年的事情。中国正在成为世界机器视觉发展最活跃的地区之一,其中最主要的原因是中国已经成为全球的加工中心,许许多多先进生产线己经或正在迁移至中国,伴随这些先进生产线的迁移,许多具有国际先进水平的机器视觉系统也进入中国。对这些机器视觉系统的维护和提升而产生的市场需求也将国际机器视觉企业吸引而至,国内的机器视觉企业在与国际机器视觉企业的学习与竞争中不断成长。 未来机器视觉的发展将呈现下列趋势: (1)技术方面的趋势是数字化、实时化、智能化 图像采集与传输的数字化是机器视觉在技术方面发展的必然趋势。更多的数字摄像机,更宽的图像数据传输带宽,更高的图像处理速度,以及更先进的图像处理算法将会推出,将会得到更广泛的应用。这样的技术发展趋势将使机器视觉系统向着实时性更好和智能程度更高的方向不断发展。 (2)产品方面:智能摄像机将会占据市场主要地位 智能摄像机具有体积小、价格低、使用安装方便、用户二次开发周期短的优点,非常适合生产线安装使用,越来越受到用户的青睐,智能摄像机所采用的许多部件与技术都来自IT行业,其价格会不断降低,逐渐会为最终用户所接受。因此,
课时跟踪检测(十六)乙醇 1.下列有关乙醇的说法正确的是() A.用酒精作燃料可降低碳的排放 B.通常状况下,不能与金属钠反应 C.在加热和有铜存在下,可与氧气反应生成乙醛 D.在水溶液中能够电离产生H+,呈现弱酸性 解析:选C A项,乙醇中含有碳元素,燃烧会产生CO2,错误;B项,乙醇中含有羟基,能与金属钠反应放出氢气,错误;C项,在加热和有铜或银存在下,可与氧气反应生成乙醛,正确;D项,乙醇属于非电解质,在水溶液中不能电离产生H+,错误。 2.下列有关乙醇的表述正确的是() A.乙醇分子中含有甲基,甲基的电子式为 B.乙醇的结构简式为C2H6O C.乙醇分子中羟基的电子式为[·×O·×H]- D.乙醇分子的填充模型为 解析:选D甲基的电子式中碳原子的周围有7个电子,A项错误;乙醇的结构简式为CH3CH2OH,B项错误;羟基呈电中性,C项错误。 3.下列物质中,分别加入金属钠,不能产生氢气的是() A.苯B.蒸馏水 C.无水酒精D.75%的酒精 解析:选A乙醇、H2O都能与Na发生置换反应生成H2,75%的酒精是水和乙醇组成的混合物,也能与Na反应生成H2;苯不能与Na反应生成H2。 4.下列物质不能氧化乙醇的是() A.氧气B.酸性高锰酸钾溶液 C.酸性重铬酸钾溶液D.稀硫酸 解析:选D乙醇可被氧气氧化成二氧化碳和水或乙醛;也可被强氧化剂酸性高锰酸钾
溶液或酸性重铬酸钾溶液氧化成乙酸,但不能被稀硫酸氧化。 5.下列乙醇的化学性质中不是由羟基所决定的是() A.跟活泼金属Na等发生反应 B.在足量O2中完全燃烧生成CO2和水 C.当Cu或Ag存在时跟O2发生反应生成乙醛和H2O D.乙醇被酸性高锰酸钾氧化为乙酸 解析:选B乙醇和金属Na反应是钠置换羟基上的氢;乙醇的催化氧化是羟基上的氧 氢键以及与羟基相连的碳原子上的碳氢键断裂,形成;而燃烧时乙醇分子中的化学键全部断裂,不是由羟基所决定的。 6.乙醇分子中的化学键如图所示,下列关于乙醇在各种反应中断裂化学键的说法不正确的是() A.与金属钠反应时①断裂 B.在加热和铜做催化剂的条件下与O2反应时断裂①和③ C.在加热和铜做催化剂的条件下与O2反应时断裂①和⑤ D.在空气中完全燃烧时断裂①②③④⑤ 解析:选C乙醇与钠反应生成乙醇钠,羟基中的O—H键断裂,A正确;乙醇催化氧化生成乙醛时,断裂①和与羟基直接相连的碳氢键即③,B正确,C错误;乙醇完全燃烧时,化学键①②③④⑤全部断裂,D正确。 7.酒驾是引发交通事故的重要原因,醉驾要入刑。交警对驾驶员进行呼气酒精检测的原理是橙色的酸性K2Cr2O7水溶液遇乙醇迅速生成蓝绿色Cr3+。下列对乙醇的描述与此测定原理有关的是() ①乙醇沸点低②乙醇密度比水小③乙醇有还原性④乙醇是烃的含氧衍生物 A.②④B.②③ C.①③D.①④ 解析:选C酒精用于对驾驶员酒驾的检测,是因为酒精沸点较低,易挥发,且具有还原性,酒精蒸气可使橙色的酸性K2Cr2O7溶液变为蓝绿色。 8.分子式为C4H10O且可与金属钠反应放出氢气的有机化合物有(不考虑立体异
行人检测与跟踪研究内容及结构安排 本文在阅读大量文献的基础上并结合当前行人检测与跟踪技术的研究现状,主要做了以下几方面的研究: 行人检测方面: (1)提出一种二维显著性纹理算子TS-LBP(Two-dimensional Significant Local Binary Pattern),将带有噪声门限的CS-LBP特征与带有阈值的显著性算子LST相结合,使得图像的纹理特征及局部显著性特征同时包含其中,取得较好的抗噪声性能。 (2)提出了一种基于感兴趣区域内颜色特征和显著性纹理特征相融合的行人检测算法,并通过Adaboost分类器进行行人检测实验。这种检测算法避免对整幅图像全局扫描,运行速度快,鲁棒性高。 行人跟踪方面: (1)提出一种局部显著性纹理算子SLBP(Significance Local Binary Patterns)又能够有效的体现图像的显著性纹理特征,能够反映目标区域内显著性比较及其纹理特征,能够有效的降低背景等外界物体的干扰。 (2)传统的基于单一颜色特征的MeanShift算法易受外界干扰,且一旦颜色特征跟踪失效将不能够对目标继续跟踪。将颜色特征与纹理特征相融合的方法能够更全面的描述目标特征,并且如果某一特征跟踪失效时可以利用另一特征继续对目标进行跟踪。由于背景干扰、光线变化等原因,跟踪过程中颜色特征与纹理特征不可能是同等重要的,因此本文提出了自适应的调整颜色特征与纹理特征的权重。同时,利用卡尔曼滤波器来预测行人的运动轨迹,可以有效节省跟踪目标所需要的时间。 本文章节的结构安排 本文共分为六章,各章节内容如下: 第一章绪论。介绍了本文的选题背景和意义,综述了目前国内外行人检测与 跟踪技术的研究现状,最后介绍了本文的主要研究内容和各章节安排。 第二章行人检测与跟踪算法中相关理论知识。阐述常用的描述物体特征的 方法,并介绍了图像增强的相关知识以及 AdaBoost 算法和支持向量机算法。第三章基于改进 LBP 特征的行人检测。针对传统的 LBP 算子只考虑了中心 像素点与邻域象素点之间的大小关系,没有加入它们之间的对比度,提出了复合局部二值模式(CLBP),将中心像素点与邻域象素点的对比度信息加入到 LBP 算子中,CLBP 特征算子对图像噪声和光照变化不太敏感,在光照条件不足场景中对行人有较强的描述能力。结合 SVM 分类器进行行人检测,检测结果证明该算法在光线不足的环境中能达到高效检测行人的目的。 第四章基于改进 AdaBoost 的双层行人检测算法。本章针对分类器的退化问 题和正负样本数量不均衡问题,对 AdaBoost 算法中权重的更新规则进行改进,并对正负样本进行权重归一化,来解决训练样本不平衡问题,算法改进后训练的
课时跟踪检测(十六) 动能和动能定理 (时间:30分钟 满分:50分) 一、单项选择题(共5小题,每小题3分,共15分。每小题只有一个选项正确) 1.关于动能概念及公式W =E k2-E k1的说法中正确的是( ) A .若物体速度在变化,则动能一定在变化 B .速度大的物体,动能一定大 C .W =E k2-E k1表示功可以变成能 D .动能的变化可以用合力做的功来量度 2.一人用力踢质量为1 kg 的皮球,使球由静止以10 m/s 的速度飞出,假定人踢球瞬间对球平均作用力是200 N ,球在水平方向运动了20 m 停止,那么人对球所做的功为( ) A .50 J B .500 J C .4 000 J D .无法确定 3.一质量为2 kg 的滑块,以4 m /s 的速度在光滑水平面上向左滑行,从某时刻起,在滑块上作用一向右的水平力。经过一段时间,滑块的速度方向变为向右,大小为4 m/s ,在这段时间水平力所做的功为( ) A .0 B .8 J C .16 J D .32 J 4.速度为v 的子弹,恰可穿透一块固定的木板。如果子弹速度为2v ,子弹穿透木板时所受阻力视为不变,则可穿透同样的固定木板( ) A .2块 B .3块 C .4块 D .8块 5.如图1所示,长为2L 的轻杆上端及其正中央固定两个质量均为m 的小球,杆的下端有光滑铰链与水平面相连接,杆原来竖直静止,现让其自由倒下,则A 着地时的速度为( ) 图1 A.1 515gL B.2 515gL C.1 5 30gL D.2 5 30gL 二、多项选择题(共3小题,每小题4分,共12分。每小题有多个选项正确,全选对得
目录 1 引言 (1) 2 视线跟踪技术概述 (2) 3 视线跟踪的基本原理 (2) 4 视线跟踪技术分析 (3) 4.1常见视线跟踪技术 (3) 4.1.1 眼电图法 (3) 4.1.2巩膜接触镜/ 搜寻线圈法 (3) 4.1.3照片图像法(POG)、视频图像法(VOG ) (4) 4.1.3.1角膜- 巩膜异色边缘反射法 (4) 4.1.3.2 角膜反射法 (4) 4.1.3.3双普金野象法 (4) 4.1.3.4基于视频结合瞳孔和角膜反射的方法 (4) 4.2各种方法的比较 (5) 5 视线跟踪技术在人机交互通道中的特点 (6) 6视线跟踪方法的研究趋势 (6) 7 视线跟踪技术在人机交互领域中的应用及前景 (7) 8 小结 (9) 9 参考文献 (9)
视线跟踪技术及其应用 摘要:本文介绍了研究、应用视线跟踪技术的必要性,回顾了视线跟踪技术的研究历程,概述了主要的视线跟踪技术及其原理,比较各种视线跟踪技术的优缺点。重点探讨了当前常用的基于视频的瞳孔-角膜高光向量法的原理和技术,并介绍了视线跟踪技术的研究方向和发展趋势。最后对视线跟踪技术在人机交互、智能机器等领域的应用前景进行了介绍和展望。 关键词:视线跟踪研究方向人机交互 1 引言 随着对人机交互技术研究的不断深入,多通道的交互备受关注,人机界面更强调“以人为中心”的原则,使用户能运用各种感觉通道以最自然的方式和计算机交互。 现有的人机交互输入绝大多数通过鼠标、键盘等实现,这些输入需要视觉或听觉接收输出信息相配合。此外,语音识别输入技术在逐渐成熟;而对身体姿势的理解、触觉的输入输出等技术在智能虚拟现实环境中得到了较多的研究。 人们在观察外部世界时眼 睛总是与其它人体活动自然协 调地工作,并且眼动所需的认 知负荷很低,人眼的注视包含 着当前的任务状况以及人的内 部状态等信息,因此眼注视是 一种非常好的能使人机对话变 得简便、自然的候选输入通道。 由于常见的上下文信息还隐藏于我们的视线中,视线反应了我们感兴趣的对象、目的和需求,具有输入输出双向性特点。视线检测使得抽取对人机交互有用的信息成为可能,从而实现自然的、直觉的和有效的交互,因此,对视线跟踪技术及其在人机交互中应用的研究具有特殊的价值。 目前,视线跟踪技术和对视线所蕴含信息的理解还处在实验研究阶段。
课时跟踪检测(十六) 有 无 相 生 一、基础知识 1.下列句子中加点的词,解释正确的一项是( ) A .长短相形. 形:形状 B .自伐. 者无功 伐:讨伐 C .其脆易泮. 泮:岸,水边 D .柔弱者生之徒. 徒:同类 解析:选D A 项,“形”,比较;B 项,“伐”,夸耀;C 项,“泮”,分离。 2.下列各组句子中加点词的意义和用法,相同的一组是( ) A.????? 治之.于未乱民之.从事 B.????? 为之于.未有合抱之木,生于. 毫末 C.????? 故有道者.不处知足者.富 D.????? 孰与物畜而.制之常于几成而.败之 解析:选C A 项,代词,代混乱;助词,放主谓之间,取消句子独立性。B 项,在;从。C 项,均为“……的人”。D 项,表递进;表修饰。 3.下列加点词的用法,不同于其他三项的一项是( ) A .常于几成而败. 之 B .怪.之,可也 C .是以圣人犹难.之 D .味. 无味 解析:选A A 项“败”为使动用法。B 、C 、D 三项中“怪”“难”“味”为意动用法。 4.下列各句与例句句式相同的一项是( ) 例:木强则折 A .报怨以德 B .图难于其易 C .蚓无爪牙之利 D .外欺于张仪 解析:选D A 、B 两项为状语后置句。C 项为定语后置句。D 项和例句相同,为被动句。 二、阅读理解 (一)课内阅读 阅读下面的文字,完成5~8题。 为无为,事无事,味无味。大小多少,报怨以德,图. 难于其易,为大于其细。天下难事必作于易,天下大事必作于细。是以圣人终不为大,故能成其大。 夫轻诺必寡信,多易必多难。是以圣人犹难之,故终无难矣。 (《老子》第六十三章) 其安易持,其未兆易谋,其脆易泮. ,其微易散。为之于未有,治之于未乱。 合抱之木,生于毫末。九层之台,起于累土。千里之行,始于足下。
深度分析眼动追踪技术 著名科学家霍金教授生前因患有肌肉萎缩疾病,几乎完全瘫痪,既不能通过双手,也不能通过语言与外界沟通。因特尔研究院的技术专家经过长期努力,研发出一款环境感知辅助系统,最终有效改善了这位科学天才与世界的沟通方式。霍金使用的智能输入法,其里面就含有眼球追踪以及面部肌肉识别等技术,正是由于这项的技术的实现,让霍金打字或者演讲的效率提高了好几倍。 视觉追踪技术也称为眼动追踪技术,就是追踪眼睛的运动。准确来讲就是通过图像处理技术,定位瞳孔位置,获取瞳孔中心坐标,并通过某种方法,计算人的注视点,让电脑知道你正在看什么。 眼睛是心灵的窗口,透过这个窗口我们可以探究人的许多心理活动的规律。人类的信息加工在很大程度上依赖于视觉,来自外界的信息约有80 %~90 %是通过人的眼睛获得的。因此对于"人是如何看事物" 的科学研究一直没有间断过。关于这一点,对于眼球运动( 以下称眼动) 的研究被认为是视觉信息加工研究中最有效的手段。 眼动追踪技术属于机器视觉的一种技术,通过对眼动轨迹的记录从中提取诸如注视点,注视时间和次数,眼跳距离,瞳孔大小等数据,从而研究个体的内在认知过程。它利用软件算法、机械、电子、光学等各种检测手段获取受试者当前视觉注意方向的技术,通过图像传感器来捕捉到眼球的图像,根据图像的处理来识别每个人的眼球瞳孔里的特征,通过这些特征实时地反算出看屏幕的注视点。 眼动追踪技术的历史 早在19世纪就有人通过考察人的眼球运动来研究人的心理活动,通过分析记录到的眼动数据来探讨眼动与人的心理活动的关系。眼动仪的问世为心理学家利用眼动技术探索人在各种不同条件下的视觉信息加工机制,观察其与心理活动直接或间接奇妙而有趣的关系,提供了新的有效工具。