图像处理之三种常见双立方插值算法
图像处理之三种常见双立方插值算法双立方插值计算
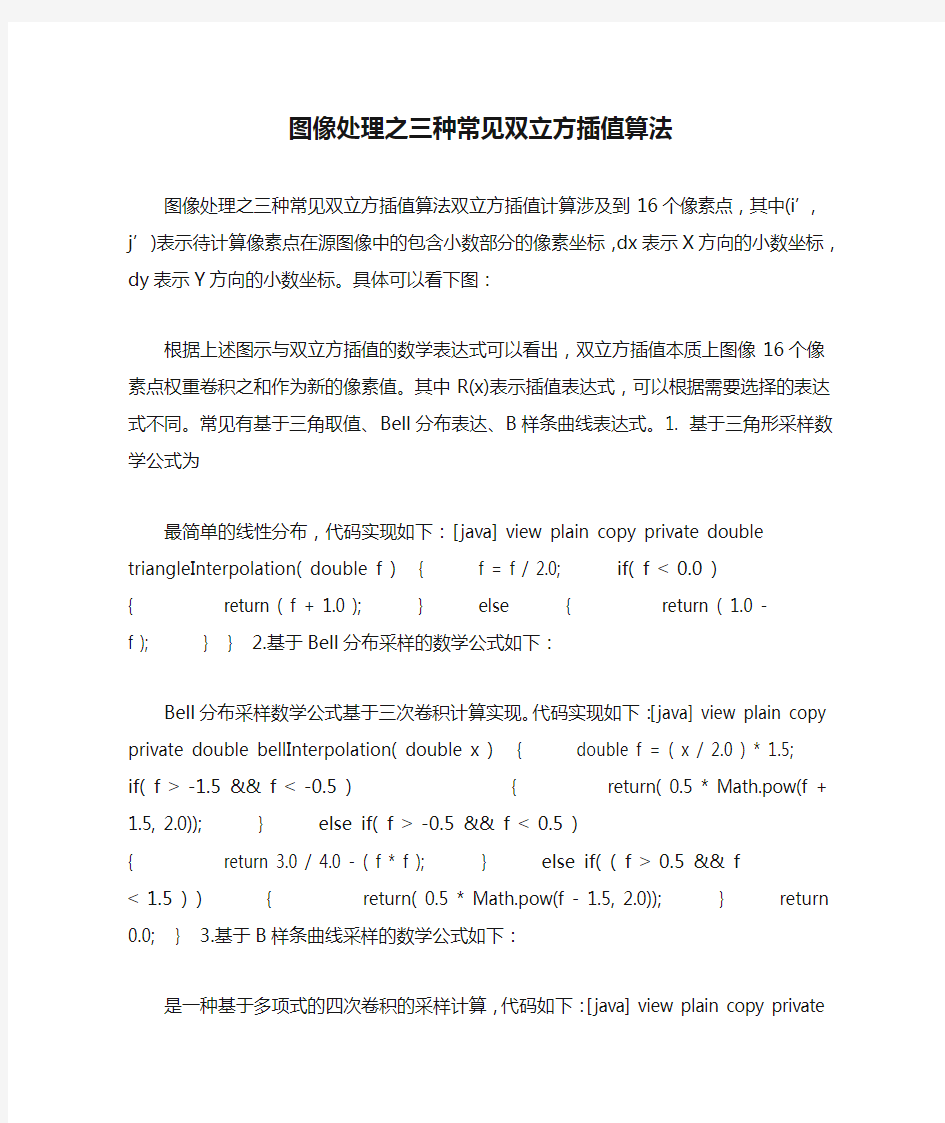
涉及到16个像素点,其中(i’, j’)表示待计算像素点在源图像
中的包含小数部分的像素坐标,dx表示X方向的小数坐标,dy表示Y方向的小数坐标。具体可以看下图:
根据上述图示与双立方插值的数学表达式可以看出,双立方插值本质上图像16个像素点权重卷积之和作为新的像素值。其中R(x)表示插值表达式,可以根据需要选择的表达式不同。常见有基于三角取值、Bell分布表达、B样条曲线表达式。1. 基于三角形采样数学公式为
最简单的线性分布,代码实现如下:[java] view plain copy private double triangleInterpolation( double f ) { f =
f / 2.0; if( f < 0.0 ) { return ( f +
1.0 ); } else { return ( 1.0 -
f ); } } 2.基于Bell分布采样的数学公式如下:
Bell分布采样数学公式基于三次卷积计算实现。代码实现如下:[java] view plain copy private double
bellInterpolation( double x ) { double f = ( x / 2.0 ) * 1.5; if( f > -1.5 && f < -0.5 )
{ return( 0.5 * Math.pow(f + 1.5, 2.0)); } else if( f > -0.5 && f < 0.5 )
{ return 3.0 / 4.0 - ( f * f ); } else if( ( f > 0.5 && f < 1.5 ) )
{ return( 0.5 * Math.pow(f - 1.5, 2.0)); } return 0.0; } 3.基于B样条曲线采样的数学公式如下:
是一种基于多项式的四次卷积的采样计算,代码如下:[java] view plain copy private double
bspLineInterpolation( double f ) { if( f < 0.0 )
{ f = -f; } if( f >= 0.0
&& f <= 1.0 ) { return ( 2.0 / 3.0 ) + ( 0.5 ) * ( f* f * f ) - (f*f); } else if( f >
1.0 && f <=
2.0 ) { return 1.0 / 6.0 * Math.pow( ( 2.0 - f ),
3.0 ); } return
1.0; } 实现图像双立方插值的完整源代码如下:[java] view plain copy package com.gloomyfish.zoom.study; import java.awt.image.BufferedImage; import
java.awt.image.ColorModel; import
com.gloomyfish.filter.study.AbstractBufferedImageOp; public class BicubicInterpolationFilter extends AbstractBufferedImageOp { public final static int TRIANGLE__INTERPOLATION = 1; public final static int BELL__INTERPOLATION = 2; public final static int BSPLINE__INTERPOLATION = 4; public
final static int CATMULLROOM__INTERPOLATION = 8; public final static double B = 0.0; public final static double C = 0.5; // constant private int destH; // zoom height private int destW; // zoom width private int type; public BicubicInterpolationFilter()
{ this.type =
BSPLINE__INTERPOLATION; } public void setType(int type) { this.type = type; } public void setDestHeight(int destH) { this.destH = destH; } public void setDestWidth(int destW) { this.destW = destW; }
private double bellInterpolation( double x )
{ double f = ( x / 2.0 ) * 1.5; if( f >
-1.5 && f < -0.5 )
{ return( 0.5 * Math.pow(f + 1.5,
2.0)); } else if( f > -0.5 &&
f < 0.5 ) { return 3.0 / 4.0 - ( f * f ); } else if( ( f > 0.5 && f < 1.5 ) ) { return( 0.5 *
Math.pow(f - 1.5, 2.0)); } return
0.0; } private double bspLineInterpolation( double f ) { if( f <
0.0 ) { f = -f; }
if( f >= 0.0 && f <= 1.0 )
{ return ( 2.0 / 3.0 ) + ( 0.5 ) * ( f* f * f ) -
(f*f); } else if( f > 1.0 && f <= 2.0 ) { return 1.0 / 6.0 * Math.pow( ( 2.0 - f ), 3.0 ); } return 1.0; } private double triangleInterpolation( double f ) { f = f / 2.0; if( f < 0.0 ) { return ( f +
1.0 ); } else
{ return ( 1.0 - f ); } } private double CatMullRomInterpolation( double f )
{ if( f < 0.0 ) { f = Math.abs(f); } if( f < 1.0 )
{ return ( ( 12 - 9 * B - 6 * C ) * ( f * f * f ) + ( -18 + 12 * B + 6 *C ) * ( f * f ) + ( 6 - 2 * B ) ) / 6.0; } else if( f >= 1.0
&& f < 2.0 ) { return ( ( -B - 6 * C ) * ( f * f * f ) + ( 6 * B + 30 * C ) * ( f *f ) + ( - ( 12 * B ) - 48 * C ) * f + 8 * B + 24 * C)/ 6.0; }
else { return
0.0; } } @Override public BufferedImage filter(BufferedImage src, BufferedImage dest) { int width = src.getWidth(); int height = src.getHeight(); if (dest == null)
dest = createCompatibleDestImage(src, null);
int[] inPixels = new int[width * height]; int[] outPixels = new int[destH * destW]; getRGB(src, 0, 0, width, height, inPixels); float rowRatio = ((float) height) / ((float) destH); float colRatio = ((float) width) / ((float) destW); int index = 0;
for (int row = 0; row < destH; row++) { int ta = 0, tr = 0, tg = 0, tb = 0; double srcRow = ((float) row) * rowRatio; // 获取整数部分坐标row Index double j = Math.floor(srcRow); // 获取行的小数部分坐标double t = srcRow - j; for (int col = 0; col < destW; col++) { double srcCol = ((float) col) * colRatio; // 获取整数部分坐标column Index double k = Math.floor(srcCol);
// 获取列的小数部分坐标double u = srcCol - k; double[] rgbData = new double[3]; double rgbCoffeData = 0.0;
for(int m=-1; m<3; m++)
{ for(int n=-1; n<3; n++)
{ int[] rgb = getPixel(j+m, k+n, width, height, inPixels);
double f1 = 0.0d; double f2 = 0.0d; if(type ==
TRIANGLE__INTERPOLATION)
{ f1 = triangleInterpolation( ((double) m ) - t );
f2 = triangleInterpolation ( -(( (double) n ) -
u ) ); }
else if(type == BELL__INTERPOLATION)
{ f1 = bellInterpolation( ((double) m ) - t );
f2 = bellInterpolation ( -(( (double) n ) -
u ) ); }
else if(type == BSPLINE__INTERPOLATION)
{ f1 = bspLineInterpolation( ((double) m ) - t );
f2 = bspLineInterpolation ( -(( (double) n ) -
u ) ); }
else
{ f1 = CatMullRomInterpolation( ((double) m ) - t );
f2 = CatMullRomInterpolation ( -(( (double) n ) -
u ) );
} // sum of weight rgbCoffeData += f2*f1; // sum of the RGB values rgbData[0] += rgb[0] * f2 * f1; rgbData[1] += rgb[1] * f2 * f1; rgbData[2] += rgb[2] * f2 *
f1; } }
ta = 255; // get Red/green/blue value for sample pixel tr = (int)
(rgbData[0]/rgbCoffeData); tg = (int) (rgbData[1]/rgbCoffeData); tb = (int) (rgbData[2]/rgbCoffeData); index = row * destW + col; outPixels[index] = (ta
<< 24) | (clamp(tr) << 16)
| (clamp(tg) << 8) |
clamp(tb); } }
setRGB(dest, 0, 0, destW, destH, outPixels);
return dest; } public int clamp(int value)
{ return value > 255 ? 255 :
(value < 0 ? 0 : value); } private int[] getPixel(double j, double k, int width, int height,
int[] inPixels) { int row = (int) j; int col = (int) k; if (row >= height)
{ row = height - 1; } if (row < 0) { row = 0; }
if (col < 0) { col = 0; }
if (col >= width) { col = width -
1; } int index = row * width + col;
int[] rgb = new int[3]; rgb[0] = (inPixels[index]
>> 16) & 0xff; rgb[1] = (inPixels[index] >> 8) & 0xff; rgb[2] = inPixels[index] & 0xff; return rgb; } public BufferedImage
createCompatibleDestImage( BufferedIma ge src, ColorModel dstCM) { if ( dstCM == null ) dstCM = src.getColorModel(); return new BufferedImage(dstCM,
dstCM.createCompatibleWritableRaster(destW, destH), dstCM.isAlphaPremultiplied(), null); } } 运行效果:原图双立方插值放大以后:
总结:基于这里三种方法实现的双立方插值以后图片跟原图像相比,都有一定模糊这里时候可以通过后续处理实现图像锐化与对比度提升即可得到Sharpen版本当然也可以通过寻找更加合适的R(x)函数来实现双立方卷积插值过程时保留图像边缘与对比度。转载请务必注明
2 三次样条插值程序 三次样条插值利用方案二(求解固支样条或压紧样条) 按照要求要起点和终点的一阶导数值已知, 可得关于01,,.....,n M M M 的严格对角占优势的三对角方程组 然后利用三对角法(追赶法)解此线性方程组。 (1)编写M 文件,并保存文件名scfit.m % x,y 分别为n 个节点的横坐标和纵坐标值组成的向量 % dx0和dxn 分别为S 的导数在x0和xn 处的值,即m 0和m n n=length(x)-1; h=diff(x); d=diff(y)./h; a=h(2:n-1); b=2*(h(1:n-1)+h(2:n)); c=h(2:n); u=6*diff(d); b(1)=b(1)-h(1)/2; u(1)=u(1)-3*(d(1)-dx0); b(n-1)=b(n-1)-h(n)/2; u(n-1)=u(n-1)-3*(dxn-d(n)); %追赶法部分 for k=2:n-1 temp=a(k-1)/b(k-1); b(k)=b(k)-temp*c(k-1); u(k)=u(k)-temp*u(k-1); end m(n)=u(n-1)/b(n-1); for k=n-2:-1:1 m(k+1)=(u(k)-c(k)*m(k+2))/b(k); end %求S K1,S K2,S K3,S K4 m(1)=3*(d(1)-dx0)/h(1)-m(2)/2; m(n+1)=3*(dxn-d(n))/h(n)-m(n)/2; for k=0:n-1 00 ()S x m '=()n n S x m '=0011111111212212n n n n n n M d M d M d M d μλμλ----??????????????????????=??????????????????????????
形态学运算:基本思想是具用一定结构形状的结构元素去度量和提取图像中的对应形状以达到对图像分析和识别的目的。 腐蚀运算:将结构元素中心遍历整个图像,当图像完全包含结构元素时的中心点的轨迹即为腐蚀后的图像,图像变细。腐蚀运算可用于滤波,选择适当大小和形状的结构元素,可以滤除掉所有不能完全包含结构元素的噪声点。当然利用腐蚀滤除噪声有一个缺点,即在去除噪声的同时,对图像中前景物体形状也会有影响,但当我们只关心物体的位置或者个数时,则影响不大。 膨胀运算:将结构元素中心遍历整个图像边缘,中心点的轨迹即为腐蚀后的图像,图像整体变粗。通常用于将图像原本断裂开来的同一物体桥接起来,对图像进行二值化之后,很容易是一个连通的物体断裂为两个部分,而这会给后续的图像分析造成干扰,此时就可借助膨胀桥接断裂的缝隙。 开运算:先腐蚀后膨胀,可以使图像的轮廓变得光滑,还能使狭窄的连接断开和消除细毛刺;但与腐蚀运算不同的是,图像大的轮廓并没有发生整体的收缩,物体位置也没有发生任何变化。可以去除比结构元素更小的明亮细节,同时保持所有灰度级和较大亮区特性相对不变,可用于补偿不均匀的背景亮度。与腐蚀运算相比,开运算在过滤噪声的同时,并没有对物体的形状轮廓造成明显的影响,但是如果我们只关心物体的位置或者个数时,物体形状的改变不会给我们带来困扰,此时腐蚀滤波具有处理速度上的优势。 闭运算:先膨胀后腐蚀,可以去除比结构元素更小的暗色细节。开闭运算经常组合起来平滑图像并去除噪声。可使轮廓变的平滑,它通常能弥合狭窄的间断,填补小的孔洞。腐蚀运算刚好和开运算相反,膨胀运算刚好和闭运算相反,开闭运算也是对偶的,然而与腐蚀、膨胀不同的是,对于某图像多次应用开或闭运算的效果相同。 击中击不中运算:先由结构元素腐蚀原图像,再将结构元素取反去腐蚀原图像的取反图,最后将两幅处理后的图像取交。主要用于图像中某些特定形状的精确定位。 顶帽变换:原图像减去开运算以后的图像。当图像的背景颜色不均匀时,使用阈值二值化会造成目标轮廓的边缘缺失,此时可用开运算(结构元素小于目标轮廓)对整个图像背景进行合理估计,再用原图像减去开运算以后的图像就会是整个图像的灰度均匀,二值化后的图像不会有缺失。 Sobel算子: Prewitt算子: LOG算子: Canny算子:力图在抗噪声干扰和精确定位之间尊求折中方案,主要步骤如下所示: 1、用高斯滤波器平滑图像; 2、用一阶偏导的有限差分来计算梯度的幅值和方向; 3、对梯度幅值进行非极大值抑制; 4、用双阈值算法检测和连接边缘。 Hough变换: 边缘检测:
沈阳航空航天大学 数学软件课程设计 (设计程序) 题目三次样条插值函数 班级 / 学号 学生姓名 指导教师
沈阳航空航天大学 课程设计任务书 课程名称数学软件课程设计 院(系)理学院专业信息与计算科学 班级学号姓名 课程设计题目三次样条插值函数 课程设计时间: 2010 年12月20日至2010 年12月31日 课程设计的内容及要求: 1.三次样条插值函数 给出函数在互异点处的值分别为。 (1)掌握求三次样条插值函数的基本原理; (2)编写程序求在第一边界条件下函数的三次样条插值函数; (3)在区间上取n=10,20,分别用等距节点对函数 作三次样条插值函数,利用(1)的结果画出插值函数的图形,并在该图形界面中同时画出的图形。 [要求] 1.学习态度要认真,要积极参与课程设计,锻炼独立思考能力; 2.严格遵守上机时间安排; 3.按照MATLAB编程训练的任务要求来编写程序; 4.根据任务书来完成课程设计论文; 5.报告书写格式要求按照沈阳航空航天大学“课程设计报告撰写规范”; 6.报告上交时间:课程设计结束时上交报告;
7.严谨抄袭行为。 指导教师年月日负责教师年月日学生签字年月日
沈阳航空航天大学 课程设计成绩评定单 课程名称数学软件课程设计 院(系)理学院专业信息与计算科学课程设计题目三次样条插值函数 学号姓名 指导教师评语: 课程设计成绩 指导教师签字 年月日
目录 一正文 (1) 1问题分析 (1) 1.1 题目 (1) 1.2 分析 (1) 2 研究方法原理 (1) 2.1 求三次样条插值多项式,算法组织 (1) 3 算例结果 (3) 二总结 (7) 参考文献 (8) 附录 (9) 源程序: (9) 程序1 (9) 程序2 (10) 程序3 (12) 程序 4 (12)
数值计算方法作业 实验4.3 三次样条差值函数 实验目的: 掌握三次样条插值函数的三弯矩方法。 实验函数: dt e x f x t ? ∞ -- = 2 221)(π 实验内容: (1) 编程实现求三次样条插值函数的算法,分别考虑不同的边界条件; (2) 计算各插值节点的弯矩值; (3) 在同一坐标系中绘制函数f(x),插值多项式,三次样条插值多项式的曲线 比较插值结果。 实验4.5 三次样条差值函数的收敛性 实验目的: 多项式插值不一定是收敛的,即插值的节点多,效果不一定好。对三次样条插值函数如何呢?理论上证明三次样条插值函数的收敛性是比较困难的,通过本实验可以证明这一理论结果。 实验内容: 按照一定的规则分别选择等距或非等距的插值节点,并不断增加插值节点的个数。 实验要求: (1) 随着节点个数的增加,比较被逼近函数和三样条插值函数的误差变化情 况,分析所得结果并与拉格朗日插值多项式比较; (2) 三次样条插值函数的思想最早产生于工业部门。作为工业应用的例子,考
虑如下例子:某汽车制造商根据三次样条插值函数设计车门曲线,其中一 算法描述: 拉格朗日插值: 错误!未找到引用源。 其中错误!未找到引用源。是拉格朗日基函数,其表达式为:() ∏ ≠=--=n i j j j i j i x x x x x l 0) ()( 牛顿插值: ) )...()(](,...,,[.... ))(0](,,[)0](,[)()(1102101210100----++--+-+=n n n x x x x x x x x x x f x x x x x x x f x x x x f x f x N 其中????? ?? ?? ?????? --=--= --= -)/(]),...,[],...,[(]...,[..],[],[],,[)()(],[01102110x x x x x f x x x f x x x f x x x x f x x f x x x f x x x f x f x x f n n n n i k j i k j k j i j i j i j i 三样条插值: 所谓三次样条插值多项式Sn(x)是一种分段函数,它在节点Xi(a 30452 计算题复习 图像处理之三种常见双立方插值算法 图像处理之三种常见双立方插值算法双立方插值计算 涉及到16个像素点,其中(i’, j’)表示待计算像素点在源图像 中的包含小数部分的像素坐标,dx表示X方向的小数坐标,dy表示Y方向的小数坐标。具体可以看下图: 根据上述图示与双立方插值的数学表达式可以看出,双立方插值本质上图像16个像素点权重卷积之和作为新的像素值。其中R(x)表示插值表达式,可以根据需要选择的表达式不同。常见有基于三角取值、Bell分布表达、B样条曲线表达式。1. 基于三角形采样数学公式为 最简单的线性分布,代码实现如下:[java] view plain copy private double triangleInterpolation( double f ) { f = f / 2.0; if( f < 0.0 ) { return ( f + 1.0 ); } else { return ( 1.0 - f ); } } 2.基于Bell分布采样的数学公式如下: Bell分布采样数学公式基于三次卷积计算实现。代码实现如下:[java] view plain copy private double bellInterpolation( double x ) { double f = ( x / 2.0 ) * 1.5; if( f > -1.5 && f < -0.5 ) { return( 0.5 * Math.pow(f + 1.5, 2.0)); } else if( f > -0.5 && f < 0.5 ) 基本图像处理算法的优化分析 摘要数字视频图像处理技术已经被广泛地应用到各个领域内,并取得了良好效果。但是就现状来看,以往所应用的基于通用CPU的图像处理系统已经无法完全满足现在所需,还需要在原有基础上来对基本图像处理算法进行优化,以求更好地提高数字图像处理速度。 关键词图像处理;算法优化;GPU 基于处理图像幅度的不断加大,以及像元密集度的逐渐增加,图像处理算法所需要面对的情况更为复杂,传统基于CPU的数字图像处理算法已经无法满足实时性要求。将GPU作为基础,基于其可编程性特点,加强对其的研究,通过其来实现对图像处理算法的优化设计,提高图像处理综合效果。 1 图像处理技术分析 图像为传递信息的重要媒介,同时也是获取信息的重要方式,因此图像处理技术在持续研究以及不断更新,实现对模拟图像处理以及数字图像处理。模拟图像处理即图像明暗程度与空间坐标处于连续状态时,无法通过计算机来对其进行处理,必须要通过光学或者电子手段处理。数字图像处理则是对图像进行简单的采样与量化处理后,通过计算机以及其他实时硬件来处理图像信息。相比来看,模拟图像处理技术具有更强灵活性,但是处理精度较低。相反数字图像处理精度高且具有较强变通能力,逐渐发展成现在主要图像处理技术。基于计算机技术、数字成像技术以及人工智能技术等,现在数字图像处理技术在不断完善,应用也越来与广泛。对于图像处理技术进行分析,可确定其包括图像分割、图像增强、图像压缩、图像复原、运动图像检测以及图像理解等[1]。传统基于CPU的图像处理技术已经无法满足实际应用需求,想要进一步提高图像处理速度以及质量,还需要在原有技术上来进行优化,争取通过高效的图像处理算法来达到最佳效果。 2 基于GPU图像处理算法优化设计 2.1 GPU结构特点 GPU即图形处理器,主要用于图形渲染的设备。相比于CPU倾向程序执行效率,GPU更倾向于大量并行数据计算,将数字图像算法特点与GPU通用计算特点进行有效结合,基于GPU来处理数字图像,可以实现图像处理算法的优化,提高图像处理速度。近年来GPU发展迅速,除了速度与质量方面的优化外,也为更多图像处理技术的发展提供了基础。现今GPU已经兼具流处理、高密集型并行运算等特点,且为GPU处理性能的拓展提高打好了基础。 2.2 GPU数字图像处理算法 MATLAB 程序设计期中考查 在许多问题中,通常根据实验、观测或经验得到的函数表或离散点上的信息,去研究分析函数的有关特性。其中插值法是一种最基本的方法,以下给出最基本的插值问题——三次样条插值的基本提法: 对插值区间[]b a ,进行划分:b x x x a n ≤ 人工智能算法在图像处理中的应用 人工智能算法在图像处理中的应用人工智能算法包括遗传算法、蚁群算法、模拟退火算法和粒子群算法等,在图像边缘检测、图像分割、图像识别、图像匹配、图像分类等领域有广泛应用。本文首先介绍常用人工智能算法的的原理和特点,然后将其在图像处理方面的应用进行综述,最后对应用前景做出展望。【关键词】人工智能算法图像处理人工智能算法是人类受自然界各种事物规律(如人脑神经元、蚂蚁觅食等)的启发,模仿其工作原理求解某些问题的算法。随着计算机技术的发展,人工智能算法在图像处理方面得到广泛应用。当前流行的人工智能算法包括人工神经网络、遗传算法、蚁群算法、模拟退火算法、粒子群算法等。 1 人工神经网络人工神经网络是一种模拟动物神经网络行为特征,进行分布式并行信息处理的算法数学模型,通过调整内部大量节点之间相互连接的关系,达到处理信息的目的,具有自组织、自学习、自推理和自适应等优点。神经网络可用于图像压缩,将图像输入层和输出层设置较多节点,中间传输层设置较少节点,学习后的网络可以较少的节点表示图像,用于存储和传输环节,节约了存储空间,提高的传输效率,最后在输出层将图像还原。学者Blanz和Gish 提出一个三层的前馈神经网络图像分割模型,Babaguchi提 出多层BP网络获取图像的分割阈值,Ghosh使用神经网络对大噪声的图像进行分割。J.Cao使用PCA神经网络提取图像特征来对图像进行分类,B.Lerner用神经网络对人类染色体图像进行分类。神经网络还可与小波变换相结合(MCNN)对手写体数字进行多分辨率识别。 2 遗传算法遗传算法(Genetic Algorithm,GA)是模拟生物进化论的自然选择和遗传学进化过程的计算模型,是一种通过模拟自然进化过程随机搜索最优解的方法,体现了适者生存、优胜劣汰的进化原则,其主要特点是直接对结构对象进行操作,不存在求导和函数连续性的限定,具有并行性和较强的全局寻优能力。遗传算法把问题的解表示成染色体,求解步骤如下: (1)编码:定义问题的解空间到染色体编码空间的映射,一个候选解(个体)用一串符号表示。(2)初始化种群:在一定的限制条件下初始化种群,该种群是解空间的一个子空间。(3)设计适应度函数:将种群中的每个染色体解码成适于适应度函数的形式,计算其数值。(4)选择:根据适应度大小选择优秀个体繁殖下一代,适应度越高,选择概率越大。(5)交叉:随机选择两个用于繁殖下一代的个体的相同位置,在选中的位置实行交换。(6)变异:对某个串中的基因按突变概率进行翻转。(7)从步骤4开始重复进行,直到满足某一性能指标或规定的遗传代数。GA在图像分割领域应用最为成熟,只要有两种应用,一是在多种分割结果中搜索最佳分 基本数字图像处理算法的matlab实现 1.数字图像处理的简单介绍 所谓数字图像就是把传统图像的画面分割成为像素的小的离散点,各像素的灰度值也是用离散值来表示的。 数字图像处理是通过计算机对图像进行去除噪声、增强、复原、分割、提取特征等处理的方法和技术。 2.图像的显示与运算 2.1图像的显示 Matlab显示语句 imshow(I,[lowhigh])%图像正常显示 I为要显示的图像矩阵。,[lowhigh]为指定显示灰度图像的灰度范围。高于high的像素被显示成白色;低于low的像素被显示成黑色;介于high和low之间的像素被按比例拉伸后显示为各种等级的灰色。 subplot(m,n,p) 打开一个有m行n列图像位置的窗口,并将焦点位于第p个位置上。 2.2图像的运算 灰度化将彩色图像转化成为灰度图像的过程成为图像的灰度化处理。彩色图像中的每个像素的颜色有R、G、B三个分量决定,而每个分量有255中值可取,这样一个像素点可以有1600多万(255*255*255)的颜色的变化范围。而灰度图像是R、G、B三个分量相同的一种特殊的彩色图像,其一个像素点的变化范围为255种,所以在数字图像处理种一般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少一些。灰度图像的描述与彩色图像一样仍然反映了整幅图像的整体和局部的色度和亮度等级的分布和特征。图像的灰度化处理可用两种方法来实现。 第一种方法使求出每个像素点的R、G、B三个分量的平均值,然后将这个平均值赋予给这个像素的三个分量。 第二种方法是根据YUV的颜色空间中,Y的分量的物理意义是点的亮度,由该值反映亮度等级,根据RGB和YUV颜色空间的变化关系可建立亮度Y与R、G、B三个颜色分量的对应:Y=0.3R+0.59G+0.11B,以这个亮度值表达图像的灰度值。 灰度是灰度级的函数,它表示图象中具有每种灰度级的象素的个数,反映图象中每种灰度出现的频率。 图像增强的目标是改进图片的质量,例如增加对比度,去掉模糊和噪声,修正几何畸变等;图像复原是在假定已知模糊或噪声的模型时,试图估计原图像的一种技术。 Matlab图像格式转换语句 rgb2gray(I) %从RGB图创建灰度图 imhist(I) %画灰度直方图 图像的线性变换 D B=f(D A)=f A*D A+f B Matlab源代码: I1=imread('F:\图片2.jpg'); subplot(2,2,1);imshow(I1);title('原图'); I2=rgb2gray(I1); %灰度化图像 subplot(2,2,2);imshow(I2);title('灰度化后图'); [M,N]=size(I2); subplot(2,2,3) [counts,x]=imhist(I2,60); %画灰度直方图 counts=counts/M/N; stem(x,counts);title('灰度直方图'); g=zeros(M,N);%图像增强 机器视觉中常用图像处理算法 机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。机器视觉是使用计算机(也许是可移动式的)来模拟人的视觉,因此模拟才是计算机视觉领域的最终目标,而真正意义上的图像处理侧重在“处理”图像:如增强,还原,去噪,分割,等等,如常见的Photoshop就是功能强大的图像处理软件。大部分的机器视觉,都包含了图像处理的过程,只有图像处理过后,才能找到图像中需要的特征,从而更进一步的执行其它的指令动作。在我们实际工程应用中研究的一些图像算法,实际上是属于机器视觉,而不是纯粹的图像处理。总的来说,图像处理技术包括图像压缩,增强和复原,匹配、描述和识别3个部分,在实际工程中,这几块不是独立的,往往是环环相扣、相互辅助来达到实际效果。接下来简单介绍一下机器视觉中常用的图像处理算法。 一、滤波 滤波一般在图像预处理阶段中使用,改善图像信息,便于后续处理,当然,这不是绝对的,在图像算法过程中如果有需要,随时可以进行滤波操作。比较常用的滤波方法有以下三种: 1、均值滤波 均值滤波也称为线性滤波,其采用的主要方法为邻域平均法。线性滤波的基本原理是用均值代替原图像中的各个像素值,即对待处理的当前像素点(,) x y,选择一个模板,该模板由其近邻的若干像素组成,求模板中所有像素的均值,再把该均值赋予当前像素点(,) g x y,即 x y,作为处理后图像在该点上的灰度值(,) 波方法可以平滑图像,速度快,算法简单。但是无法去掉噪声,只能减弱噪声。 2、中值滤波 CENTRAL SOUTH UNIVERSITY 数值分析实验报告 三次样条插值方法的应用 一、问题背景 分段低次插值函数往往具有很好的收敛性,计算过程简单,稳定性好,并且易于在在电子计算机上实现,但其光滑性较差,对于像高速飞机的机翼形线船体放样等型值线往往要求具有二阶光滑度,即有二阶连续导数,早期工程师制图时,把富有弹性的细长木条(即所谓的样条)用压铁固定在样点上,在其他地方让他自由弯曲,然后沿木条画下曲线,称为样条曲线。样条曲线实际上是由分段三次曲线并接而成,在连接点即样点上要求二阶导数连续,从数学上加以概括就得到数学样条这一概念。下面我们讨论最常用的三次样条函数及其应用。 二、数学模型 样条函数可以给出光滑的插值曲线(面),因此在数值逼近、常微分方程和偏微分方程的数值解及科学和工程的计算中起着重要的作用。 设区间[]b ,a 上给定有关划分b x x n =<<<=Λ10x a ,S 为[]b ,a 上满足下面条件的函数。 ● )(b a C S ,2∈; ● S 在每个子区间[]1,+i i x x 上是三次多项式。 则称S 为关于划分的三次样条函数。常用的三次样条函数的边界条件有三种类型: ● Ⅰ型 ()()n n n f x S f x S ''0'',==。 ● Ⅱ型 ()()n n n f x S f x S ''''0'''',==,其特殊情况为()()0''''==n n x S x S 。 ● Ⅲ型 ()()Λ3,2,1,0,0==j x S x S n j j ,此条件称为周期样条函数。 鉴于Ⅱ型三次样条插值函数在实际应用中的重要地位,在此主要对它进行详细介绍。 三、算法及流程 按照传统的编程方法,可将公式直接转换为MATLAB可是别的语言即可;另一种是运用矩阵运算,发挥MATLAB在矩阵运算上的优势。两种方法都可以方便地得到结果。方法二更直观,但计算系数时要特别注意。这里计算的是方法一的程序,采用的是Ⅱ型边界条件,取名为spline2.m。 Matlab代码如下: function s=spline2(x0,y0,y21,y2n,x) %s=spline2(x0,y0,y21,y2n,x) %x0,y0 are existed points,x are insert points,y21,y2n are the second %dirivitive numbers given. n=length(x0); km=length(x); a(1)=-0.5; b(1)=3*(y0(2)-y0(1))/(2*(x0(2)-x0(1))); for j=1:(n-1) h(j)=x0(j+1)-x0(j); end for j=2:(n-1) alpha(j)=h(j-1)/(h(j-1)+h(j)); beta(j)=3*((1-alpha(j))*(y0(j)-y0(j-1))/h(j-1)+alpha(j)*(y0(j+1)-y0(j))/h(j)); 8种常用图像处理算法(函数)------以下所有函数均放在https://www.doczj.com/doc/293966171.html,p下 1.图像镜像 void CCimageProcessingView::OnGeomTrpo() { //获取指向文档的指针 CCimageProcessingDoc* pDoc = GetDocument(); //指向DIB的指针 LPSTR lpDIB; //锁定DIB lpDIB = (LPSTR) ::GlobalLock((HGLOBAL) pDoc->GetHDIB()); //设置光标状态为等待状态 BeginWaitCursor(); //调用VertMirror函数镜像图象 if (VertMirror(lpDIB)) { //设置文档修改标记 pDoc->SetModifiedFlag(TRUE); //更新所有视图 pDoc->UpdateAllViews(NULL); } else { //提示信息 MessageBox("实现图象镜像失败!"); } //解除锁定 ::GlobalUnlock((HGLOBAL) pDoc->GetHDIB()); //结束光标等待状态 EndWaitCursor(); } * 函数名称: * * VertMirror() * * 参数: * * LPSTR lpDIB //指向源DIB图像指针 * * 返回值: * * BOOL //镜像成功返回TRUE,否则返回FALSE。 * * 说明: * * 该函数用来实现DIB图像的垂直镜像。 * BOOL WINAPI VertMirror(LPSTR lpDIB) { //原图象宽度 LONG lWidth; //原图象高度 LONG lHeight; //原图象的颜色数 WORD wNumColors; //原图象的信息头结构指针 LPBITMAPINFOHEADER lpbmi; //指向原图象和目的图象的像素的指针 LPBYTE lpSrc,lpDst; //平移后剩余图像在源图像中的位置(矩形区域) CRect rectSrc; //指向原图像像素的指针 LPBYTE lpDIBBits; //指向复制图像像素的指针 LPBYTE lpNewDIBBits; //内存句柄 HLOCAL h; //循环变量 LONG i; //图像每行的字节数 LONG lLineBytes; //获取图象的信息头结构的指针 lpbmi=(LPBITMAPINFOHEADER)lpDIB; //找到图象的像素位置 lpDIBBits=(LPBYTE)::FindDIBBits(lpDIB); //获取图象的宽度 lWidth=::DIBWidth(lpDIB); //获取图象的高度 lHeight=::DIBHeight(lpDIB); //获取图象的颜色数 wNumColors=::DIBNumColors(lpDIB); //计算图像每行的字节数 lLineBytes = WIDTHBYTES(lWidth *(lpbmi->biBitCount)); // 暂时分配内存,以保存新图像 h= LocalAlloc(LHND, lLineBytes); // 分配内存失败,直接返回 if (!h) 用MATLAB 进行图像处理算法的界面设计 目录 1.设计目的 (3) 2.题目分析 (3) 3.总体设计 (3) 4.具体设计 (5) 5.结果分析 (34) 6.心得体会 (34) 7.附录代码 (36) 1、设计目的:综合运用MATLAB工具箱实现图像处理的GUI程序设计,利用MATLAB图像处理工具箱,设计和实现自己的Photoshop 。 2、题目分析 利用matlab的GUI程序设计一个简单实用的图像处理程序。该程序应具备图像处理的常用功能,以满足用户的使用。现设计程序有以下基本功能: 1)图像的读取和保存。 2)设计图形用户界面,让用户能够对图像进行任意的亮度和对比度变化调整,显示和对比变换前后的图像。 3)设计图形用户界面,让用户能够用鼠标选取图像感兴趣区域,显示和保存该选择区域。 4)编写程序通过最近邻插值和双线性插值等算法将用户所选取的图像区域进行放大和缩小整数倍的操作,并保存,比较几种插值的效果。 5)图像直方图统计和直方图均衡,要求显示直方图统计,比较直方图均衡后的效果。 6)能对图像加入各种噪声,并通过几种滤波算法实现去噪并显示结果。 7)额外功能。 3、总体设计 图一 软件的总体设计界面布局如上图所示,主要分为2个部分:显示区域与操作区域。显示区域:显示载入原图,以及通过处理后的图像。 操作区域:通过功能键实现对图像的各种处理。 在截图中可见,左部为一系列功能按键如“还原”、“撤销”、“截图”等等;界面正中部分为图片显示部分,界面中下方为系列功能切换选择组。 设计完成后运行的软件界面如下: 图二 与图一先比,运行后的界面更为简洁。 利用“编辑”菜单可调出相应的功能键。例如: 一、图像的预处理技术 图像处理按输入结果可以分为两类,即输入输出都是一副图像和输入一张图像输出不再是图像的数据。图像处理是个很广泛的概念,有时候我们仅仅需要对一幅图像做一些简单的处理,即按照我们的需求将它加工称我们想要得效果的图像,比如图像的降噪和增强、灰度变换等等。更多时候我们想要从一幅图像中获取更高级的结果,比如图像中的目标检测与识别。如果我们将输出图像中更高级的结果视为目的的话,那么我们可以把输入输出都是一幅图像看作是整个处理流程中的预处理。下面我们将谈到一些重要的预处理技术。 (一)图像增强与去噪 图像的增强是一个主观的结果,原来的图像按照我们的需求被处理成我们想要的效果,比如说模糊、锐化、灰度变换等等。图像的去噪则是尽可能让图像恢复到被噪声污染前的样子。衡量标准是可以度量的。不管是图像的增强与去噪,都是基于滤波操作的。 1.滤波器的设计方法 滤波操作是图像处理的一个基本操作,滤波又可分为空间滤波和频域滤波。空间滤波是用一个空间模板在图像每个像素点处进行卷积,卷积的结果就是滤波后的图像。频域滤波则是在频率域看待一幅图像,使用快速傅里叶变换将图像变换到频域,得到图像的频谱。我们可以在频域用函数来保留或减弱/去除相应频率分量,再变换回空间域,得到频域滤波的结果。而空间滤波和频域滤波有着一定的联系。频域滤波也可以指导空间模板的设计,卷积定理是二者连接的桥梁。 (1)频域滤波 使用二维离散傅里叶变换(DFT )变换到频域: ∑∑-=+--==10)//(210),(),(N y N vy M ux i M x e y x f v u F π 使用二维离散傅里叶反变换(IDFT )变换到空间域: ∑∑-=-=+=1010)//(2),(1),(M u N v N vy M ux i e v u F MN y x f π 在实际应用中,由于该过程时间复杂度过高,会使用快速傅里叶变换(FFT )来加速这个过程。现在我们可以在频域的角度看待这些图像了。必须了解的是,图像中的细节即灰度变化剧烈的地方对应着高频分量,图像中平坦变化较少的地方对应着低频分量。图像中的周期性图案/噪声对应着某一个频率区域,那么在频域使用合适的滤波器就能去除相应的频率分量,再使用傅里叶反变换就能看到实际想要的结果。 不同的是,在频域的滤波器不再是做卷积,而是做乘积,因为做乘法的目的在于控制频率分量。比较有代表性的有如下几个滤波器: 高斯低通滤波器 222/),(),(σv u D e v u H -= D 是距离频率矩形中心的距离。该滤波器能保留低频分量,逐渐减小高频分量,对原图像具有模糊作用。 MATLAB三次样条插值之三弯矩法 首先说这个程序并不完善,为了实现通用(1,2,…,n)格式解题,以及为调用追赶法程序,没有针对节点数在三个以下的情况进行分类讨论。希望能有朋友给出更好的方法。 首先,通过函数sanwanj得到方程的系数矩阵,即追赶法方程的四个向量参数,接下来调 用追赶法(在intersanwj函数中),得到三次样条分段函数系数因子,然后进行多项式合并 得到分段函数的解析式,程序最后部分通过判断输入值的区间自动选择对应的分段函数并计算 改点的值。附:追赶法程序chase %%%%%%%%%%%%%% function [newv,w,newu,newd]=sanwj(x,y,x0,y0,y1a,y1b)?%三弯矩样 条插值?%将插值点分两次输入,x0y0单独输入?% 边值条件a的二阶导数 y1a 和b 的二阶导数y1b,这里建议将y1a和y1b换成y2a和y2b,以便于和三转角代码相区别 ?n=length(x);m=length(y); if m~=n?error('x or y 输入有误,再来'); end?v=ones(n-1,1);u=ones(n-1,1);d=zeros(n-1,1);?w=2*o nes(n+1);?h0=x(1)-x0;?h=zeros(n-1,1); for k=1:n-1?h(k)=x(k+1)-x(k);?end v(1)=h0/(h0+h(1)); u(1)=1-v(1); d(1)=6*((y(2)-y(1))/h(1)-(y(1)-y0)/h0)/(h0+h(1));?% for k=2:n-1?v(k)=h(k-1)/(h(k-1)+h(k));?u(k)=1-v(k);?d(k)= 6*((y(k+1)-y(k))/h(k)-(y(k)-y(k-1))/h(k-1))/(h(k-1)+h(k)); end newv=[v;1];?newu=[1;u]; d0=6*((y(1)-y0)/h0-y1a)/h0; d(n)=6*(y1b-(y(n)-y(n-1))/h(n-1))/h(n-1); newd=[d0;d]; %%%%%%%%%%%% function intersanwj(x,y,x0,y0,y1a,y1b) %三弯矩样条插值?%第一部分?n=length(x);m=length(y); if m~=n?error('xory 输入有误,再来'); end?%重新定义h?h=zeros(n,1); h(1)=x(1)-x0; for k=2:n h(k)=x(k)-x(k-1);?end %sptep1调用三弯矩函数?[a,b,c,d]=sanwj(x,y,x0,y0,y1a,y1b); 图像增强技术研究 1 图像增强概述 1.1 图像增强的定义 图像增强是指按特定的需要突出一幅图像中的某些信息,同时削弱或去除某些不需要的信息的处理方法,也是提高图像质量的过程。图像增强的目的是使图像的某些特性方面更加鲜明、突出,使处理后的图像更适合人眼视觉特性或机器分析,以便于实现对图像的更高级的处理和分析。图像增强的过程往往也是一个矛盾的过程:图像增强希望既去除噪声又增强边缘。但是,增强边缘的同时会同时增强噪声,而滤去噪声又会使边缘在一定程度上模糊,因此,在图像增强的时候,往往是将这两部分进行折中,找到一个好的代价函数达到需要的增强目的。传统的图像增强算法在确定转换函数时常是基于整个图像的统计量,如:ST转换,直方图均衡,中值滤波,微分锐化,高通滤波等等。这样对应于某些局部区域的细节在计算整幅图的变换时其影响因为其值较小而常常被忽略掉,从而局部区域的增强效果常常不够理想,噪声滤波和边缘增强这两者的矛盾较难得到解决。 1.2 常用的图像增强方法 (1)直方图均衡化 有些图像在低值灰度区间上频率较大,使得图像中较暗区域中的细节看不清楚。这时可以通过直方图均衡化将图像的灰度围分开,并且让灰度频率较小的灰度级变大,通过调整图像灰度值的动态围,自动地增加整个图像的对比度,使图像具有较大的反差,细节清晰。 (2)对比度增强法 有些图像的对比度比较低,从而使整个图像模糊不清。这时可以按一定的规则修改原来图像的每一个象素的灰度,从而改变图像灰度的动态围。 (3)平滑噪声 有些图像是通过扫描仪扫描输入、或传输通道传输过来的。图像中往往包含有各种各样的噪声。这些噪声一般是随机产生的,因此具有分布和大小不规则性的特点。这些噪声的存在直接影响着后续的处理过程,使图像失真。图像平滑就是针对图像噪声的操作,其主要作用是为了消除噪声,图像平滑的常用方法是采用均值滤波或中值滤波,均值滤波是一种线性空间滤波,它用一个有奇数点的掩模在图像上滑动,将掩模中心对应像素点的灰度值用掩模所有像素点灰度的平均值代替,如果规定了在取均值过程中掩模各像素点所占的权重,即各像素点所乘系数,这时就称为加权均值滤波;中值滤波是一种非线性空间滤波,其与均值滤波的区别是掩模中心对应像素点的灰度值用掩模所有像素点灰度值的中间值代替。 (4)锐化 平滑噪声时经常会使图像的边缘变的模糊,针对平均和积分运算使图像模糊,可对其进行反运算采取微分算子使用模板和统计差值的方法,使图像增强锐化。图像边缘与高频分量相对应,高通滤波器可以让高频分量畅通无阻,而对低频分量则充分限制,通过高通滤波器去除低频分量,也可以达到图像锐化的目的。 1.3图像增强的现状与应用 计算机图像处理的发展历史不长,但已经引起了人们的重视。图像处理技术始20世纪60年代,由于当时图像存储成本高,处理设备造价高,因而其应用面很窄。1964年美国加州理工学院的喷气推进实验室,首次对徘徊者7号太空飞船发回的月球照片进行了处理,得到了前所未有的清晰图像,这标志着图像处理技术开始得到实际应用。70年代进入发展期,出现cr和卫星遥感图像,对图像处理的发展起到了很好的促进作用。80年代进入普及期,此时微机己经能够承担起图形图像处理的任务。VLSI的出现更使得处理速度大大提高,其造价也进一步降低,极大的促进了图像处理系统的普及和应用。90年代是图像处理技术实用化时期,图像处理的信息量巨大,对处理的速度要求极高。21世纪的图像处理技术要向高质量化方面发展,实现图像的实时处理,采用数字全息技术使图像包含最为完整和丰富的信息,实现图像的智能生成、处理、理解和识别[7]。 30452计算题复习 一、直方图均衡化(P68) 对已知图像进行直方图均衡化修正。 例:表1为已知一幅总像素为n=64×64的8bit数字图像(即灰度级数为8),各灰度级(出现的频率)分布列于表中。要求将此幅图像进行均衡化修正(变换),并画出修正(变换)前后的直方图。 表1 解:对已知图像均衡化过程见下表: 画出直方图如下: (a )原始图像直方图 (b )均衡化后直方图 **以下部分不用写在答题中。 其中: ① r k 、n k 中k = 0,1,…,7 ② p r (r k ) = n k /n ,即计算各灰度级像素个数占所有像素个数的百分比,其中∑==k j j n n 0 ,在此题中n =64×64。 ③ ∑== k j j r k r p s 0 )(计,即计算在本灰度级之前(包含本灰度级)所有百分比之和。 ④ ]5.0)1int[(+-=计并k k s L s ,其中L 为图像的灰度级数(本题中L = 8),int[ ]表示对方括号中的数字取整。 ⑤ 并k k s s = ⑥ n sk 为映射对应关系r k →s k 中r k 所对应的n k 之和。 ⑦ n n s p sk k s /)(=,或为映射对应关系r k →s k 中r k 所对应的p r (r k )之和。 二、 模板运算 使用空间低通滤波法对图像进行平滑操作(P80) 空间低通滤波法是应用模板卷积方法对图像每一个像素进行局部处理。模板(或称掩模)就是一个滤波器,它的响应为H (r ,s ),于是滤波输出的数字图像g(x ,y )用离散卷积表示为 )6.2.4() ,(),(),(∑∑-=-=--= l l s k k r s r H s y r x f y x g 式中:x ,y = 0,1,2,…,N -1;k 、l 根据所选邻域大小来决定。 具体过程如下: (1)将模板在图像中按从左到右、从上到下的顺序移动,将模板中心与每个像素依次重合(边缘像素除外); (2)将模板中的各个系数与其对应的像素一一相乘,并将所有的结果相加; (3)将(2)中的结果赋给图像中对应模板中心位置的像素。 对于空间低通滤波器而言,采用的是低通滤波器。由于模板尺寸小,因此具有计算量小、使用灵活、适于并行计算等优点。常用的3*3低通滤波器(模板)有: 模板不同,邻域内各像素重要程度也就不同。但无论怎样的模板,必须保证全部权系数之和为1,这样可保 证输出图像灰度值在许可范围内,不会产生灰度“溢出”现象。 1 7 1 8 1 7 1 1 1 1 1 5 1 1 1 1 1 1 5 5 5 1 1 7 1 1 5 5 5 1 8 1 8 1 1 5 1 1 1 1 8 1 1 5 1 1 8 1 1 1 1 5 1 1 1 1 1 7 1 8 1 7 1 1 解:低通滤波的步骤为: (1)将模板在图像中按从左到右、从上到下的顺序移动,将模板中心与每个像素依次重合(边缘像素除外); (2)将模板中的各个系数与其对应的像素一一相乘,并将所有的结果相加; (3)将(2)中的结果赋给图像中对应模板中心位置的像素。 如图中第2行第2列处的值 = (1*1+1*7+1*1+1*1+2*1+1*1+1*1+1*1+1*5)/10 = 2数字图像处理计算题复习精华版
一、 直方图均衡化(P68)
对已知图像进行直方图均衡化修正。
例:表 1 为已知一幅总像素为 n=64×64 的 8bit 数字图像(即灰度级数为 8),各灰度级(出现的频率)分布
列于表中。要求将此幅图像进行均衡化修正(变换),并画出修正(变换)前后的直方图。
表1
原图像灰
度级 rk
r0=0 r1=1 r2=2 r3=3 r4=4 r5=5 r6=6 r7=7
原各灰度级 原分布概率
像素个数 nk pr(rk)
790
0.19
1023
0.25
850
0.21
656
0.16
329
0.08
245
0.06
122
0.03
81
0.02
解:对已知图像均衡化过程见下表:
原图像灰
度级 rk
原各灰度级 原分布概率 累积分布函
像素个数 nk
pr(rk)
数 sk 计
取整扩展
sk 并
r0=0
790
0.19
0.19
1
r1=1
1023
0.25
0.44
3
r2=2
850
0.21
0.65
5
r3=3
656
0.16
0.81
6
r4=4
329
0.08
0.89
6
r5=5
245
0.06
0.95
7
r6=6
122
0.03
0.98
7
r7=7
81
0.02
1.00
7
画出直方图如下:
确定映射 对应关系
rk→sk
0→1 1→3 2→5 3→6 4→6 5→7 6→7 7→7
新图像灰
度级 sk
1 3 5
新图像各灰 度级像素个
数 nsk
790 1023 850
新图像分 布概率
ps(sk)
0.19 0.25 0.21
6
985
0.24
7
448
0.11
1图像处理之三种常见双立方插值算法
基本图像处理算法的优化分析
(精选)三次样条插值的MATLAB实现
(完整word版)人工智能算法在图像处理中的应用
基本数字(精选)图像处理算法的matlab实现
常用算法简介
三次样条插值方法的应用
常用图像处理算法
MATLAB中GUI在图像处理应用中的设计(包括各种算法)
数字图像处理的基本方法
MATLAB三次样条插值之三弯矩法
智能图像处理算法结合分析
数字图像处理计算题复习精华版要点
相关主题
文本预览