GPS卫星位置的计算
- 格式:docx
- 大小:13.67 KB
- 文档页数:3
GPS卫星位置计算
GPS(全球定位系统)卫星位置计算是指利用GPS系统中的卫星信号
来确定地球上其中一点的精确位置。
GPS系统是由一组运行在地球轨道上
的卫星组成,通过接收到这些卫星发出的信号,可以进行三角测量,从而
计算出接收器的准确位置。
在GPS卫星位置计算中,主要涉及的概念有卫
星轨道、卫星位置估计、测量范围等。
卫星位置估计是指通过接收到多颗卫星发出的信号,利用三角测量原
理来估计卫星的准确位置。
当接收器接收到至少4颗卫星的信号时,可以
根据卫星的位置信息以及接收信号的时间差来计算出接收器的准确位置。
其中,接收信号的时间差可以通过卫星信号中的时间戳来获得,而卫星位
置信息则是通过卫星的广播信号来传输的。
测量范围是指卫星信号的有效接收范围,理论上,在开阔的空地上,
能够接收到卫星信号的范围应该是全球范围。
然而,在一些特殊的环境中,如高楼大厦、山谷、密林等地形复杂的地方,接收器可能受到归一化干扰,导致无法正常接收到卫星信号。
为了解决这个问题,可以通过建立更多的
基站或使用增强型GPS接收器等手段来提高信号接收的可靠性和精确性。
总结起来,GPS卫星位置计算通过接收到卫星发出的信号,利用三角
测量原理来计算接收器的准确位置。
这个过程涉及到卫星轨道、卫星位置
估计、测量范围等概念,通过合理的部署卫星、精确的计算方法和有效的
信号接收手段,可以实现全球范围内的地理定位服务。
GPS卫星的坐标计算第三章GPS 卫星的坐标计算在⽤GPS 信号进⾏导航定位以及制订观测计划时,都必须已知GPS 卫星在空间的瞬间位置。
卫星位置的计算是根据卫星导航电⽂所提供的轨道参数按⼀定的公式计算的。
3.1卫星运动的轨道参数3.1.1基本概念 1.作⽤在卫星上⼒卫星受的作⽤⼒主要有:地球对卫星的引⼒,太阳、⽉亮对卫星的引⼒,⼤⽓阻⼒,⼤⽓光压,地球潮汐⼒等。
中⼼⼒:假设地球为匀质球体的引⼒(质量集中于球体的中⼼),即地球的中⼼引⼒,它决定卫星运动的基本规律和特征,决定卫星轨道,是分析卫星实际轨道的基础。
此种理想状态时卫星的运动称为⽆摄运动,卫星的轨道称为⽆摄轨道。
摄动⼒:也称⾮中⼼⼒,包括地球⾮球形对称的作⽤⼒、⽇⽉引⼒、⼤⽓阻⼒、⼤⽓光压、地球潮汐⼒等。
摄动⼒使卫星运动产⽣⼀些⼩的附加变化⽽偏离理想轨道,同时这种偏离量的⼤⼩随时间⽽改变。
此种状态时卫星的运动称为受摄运动,卫星的轨道称为受摄轨道。
虽然作⽤在卫星上的⼒很多,但这些⼒的⼤⼩却相差很悬殊。
如果将地球引⼒当作1的话,其它作⽤⼒均⼩于10-5。
2.⼆体问题研究两个质点在万有引⼒作⽤下的运动规律问题称为⼆体问题。
3.卫星轨道和卫星轨道参数卫星在空间运⾏的轨迹称为卫星轨道。
描述卫星轨道状态和位置的参数称为轨道参数。
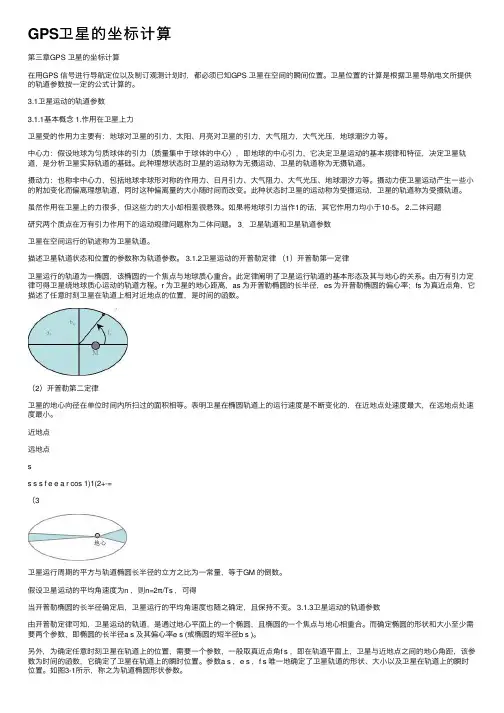
3.1.2卫星运动的开普勒定律(1)开普勒第⼀定律卫星运⾏的轨道为⼀椭圆,该椭圆的⼀个焦点与地球质⼼重合。
此定律阐明了卫星运⾏轨道的基本形态及其与地⼼的关系。
由万有引⼒定律可得卫星绕地球质⼼运动的轨道⽅程。
r 为卫星的地⼼距离,as 为开普勒椭圆的长半径,es 为开普勒椭圆的偏⼼率;fs 为真近点⾓,它描述了任意时刻卫星在轨道上相对近地点的位置,是时间的函数。
(2)开普勒第⼆定律卫星的地⼼向径在单位时间内所扫过的⾯积相等。
表明卫星在椭圆轨道上的运⾏速度是不断变化的,在近地点处速度最⼤,在远地点处速度最⼩。
近地点远地点ss s s f e e a r cos 1)1(2+-=(3卫星运⾏周期的平⽅与轨道椭圆长半径的⽴⽅之⽐为⼀常量,等于GM 的倒数。
卫星定位公式
卫星定位公式是用于计算接收器所接收到的卫星信号的时间和位置的公式。
在全球定位系统(GPS)中,卫星定位公式基于以下三个主要部分:
1. 卫星发射时间
2. 卫星信号传播时间
3. 接收器时间
卫星定位公式可以表示为:
T = T0 + ΔT + ΔT'
其中:
-T 是接收器显示的时间;
-T0 是卫星发射的时间;
-ΔT 是卫星信号传播时间;
-ΔT' 是接收器时间误差。
卫星信号传播时间ΔT可以通过以下公式计算:
ΔT = sqrt((c * T0) / (4 * π* d))
其中:
- c 是光速,约为3 ×10^8 米/秒;
-T0 是卫星发射的时间;
- d 是卫星与接收器之间的距离。
接收器时间误差ΔT'主要取决于接收器的精度以及其他外部因素。
此外,为了计算接收器的位置,还需要另一个方程。
通常使用伪距测量法,伪距测量方程为:
ρ= sqrt((c * ΔT)^2 + b^2)
其中:
-ρ是伪距;
- c 是光速;
-ΔT 是卫星信号传播时间;
- b 是卫星轨道误差。
结合这两个方程,可以解出接收器的时间和位置。
实际上,GPS系统使用四个以上卫星的信号,因此可以利用多个方程来求解接收器的位置,从而提高定位精度。
这种方法称为解算四元组。
第三章GPS 卫星的坐标计算在用GPS 信号进行导航定位以及制订观测计划时,都必须已知GPS 卫星在空间的瞬间位置。
卫星位置的计算是根据卫星导航电文所提供的轨道参数按一定的公式计算的。
3.1卫星运动的轨道参数3.1.1基本概念 1.作用在卫星上力卫星受的作用力主要有:地球对卫星的引力,太阳、月亮对卫星的引力,大气阻力,大气光压,地球潮汐力等。
中心力:假设地球为匀质球体的引力(质量集中于球体的中心),即地球的中心引力,它决定卫星运动的基本规律和特征,决定卫星轨道,是分析卫星实际轨道的基础。
此种理想状态时卫星的运动称为无摄运动,卫星的轨道称为无摄轨道。
摄动力:也称非中心力,包括地球非球形对称的作用力、日月引力、大气阻力、大气光压、地球潮汐力等。
摄动力使卫星运动产生一些小的附加变化而偏离理想轨道,同时这种偏离量的大小随时间而改变。
此种状态时卫星的运动称为受摄运动,卫星的轨道称为受摄轨道。
虽然作用在卫星上的力很多,但这些力的大小却相差很悬殊。
如果将地球引力当作1的话,其它作用力均小于10-5。
2.二体问题研究两个质点在万有引力作用下的运动规律问题称为二体问题。
3.卫星轨道和卫星轨道参数卫星在空间运行的轨迹称为卫星轨道。
描述卫星轨道状态和位置的参数称为轨道参数。
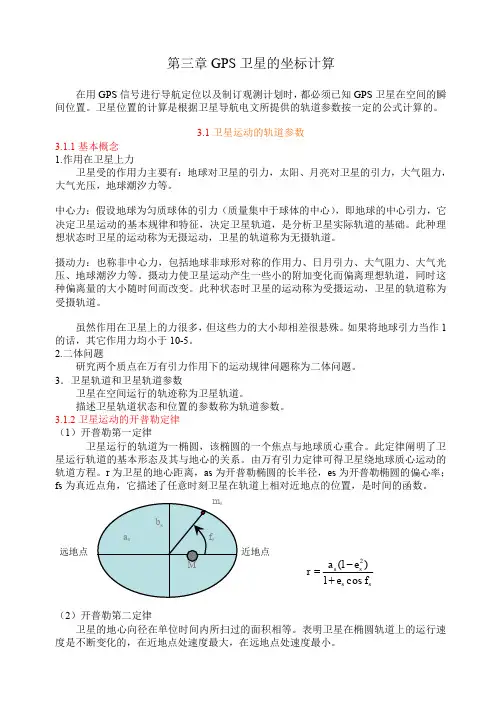
3.1.2卫星运动的开普勒定律 (1)开普勒第一定律卫星运行的轨道为一椭圆,该椭圆的一个焦点与地球质心重合。
此定律阐明了卫星运行轨道的基本形态及其与地心的关系。
由万有引力定律可得卫星绕地球质心运动的轨道方程。
r 为卫星的地心距离,as 为开普勒椭圆的长半径,es 为开普勒椭圆的偏心率;fs 为真近点角,它描述了任意时刻卫星在轨道上相对近地点的位置,是时间的函数。
(2)开普勒第二定律卫星的地心向径在单位时间内所扫过的面积相等。
表明卫星在椭圆轨道上的运行速度是不断变化的,在近地点处速度最大,在远地点处速度最小。
近地点远地点ss s s f e e a r cos 1)1(2+-=(3卫星运行周期的平方与轨道椭圆长半径的立方之比为一常量,等于GM 的倒数。
卫星定位公式【原创版】目录1.卫星定位的基本原理2.卫星定位公式的构成3.卫星定位公式的应用4.卫星定位技术的发展正文1.卫星定位的基本原理卫星定位系统是一种利用卫星发射的信号来确定地球表面某一点的精确位置的技术。
其基本原理可以概括为:测量卫星发射的信号从卫星到达地面某一点的时间,根据光速和时间的关系,计算出该点与卫星之间的距离。
同时,通过至少三个卫星的定位,可以确定该点的三维坐标。
2.卫星定位公式的构成卫星定位公式主要包括以下三个部分:(1) 计算卫星与地面点之间的距离公式:d = c * t,其中 d 为距离,c 为光速(约为 3 * 10^8 米/秒),t 为信号传输时间。
(2) 计算卫星的轨道参数公式:T = 2 * π * sqrt(a^3 / μ),其中 T 为卫星的周期,a 为卫星的半长轴,μ为地球的标准引力参数。
(3) 计算地面点的三维坐标公式:x = (t1 * cos(E1) - t2 * cos(E2)) * cos(A) + (t1 * sin(E1) - t2 * sin(E2)) * sin(A),y = (t1 * cos(E1) - t2 * cos(E2)) * sin(A) - (t1 * sin(E1) - t2 * sin(E2)) * cos(A),z = (t1 * cos(E1) + t2 * cos(E2)) * cos(I) + (t1 * sin(E1) + t2 * sin(E2)) * sin(I),其中 x、y、z 为地面点的三维坐标,t1、t2 为卫星 1、卫星 2 的信号传输时间,E1、E2、I 分别为卫星 1、卫星 2 的倾角和地球的倾角。
3.卫星定位公式的应用卫星定位公式广泛应用于各种定位导航系统,如我国的北斗卫星导航系统、美国的 GPS 系统等。
这些系统通过卫星发射的信号,实时计算接收器与卫星之间的距离,从而实现对地球表面的精确定位。
GPS导航定位原理以及定位解算算法GPS(全球定位系统)是一种基于卫星信号的导航系统,用于确定地球上任意点的位置和时间。
GPS导航定位的原理基于三个基本原则:距离测量、导航电文和定位解算。
首先,定位解算的基本原理是通过测量卫星与接收器之间的距离差异来确定接收器的位置。
GPS接收器接收卫星发射的信号,并测量信号从卫星到接收器的时间延迟。
通过已知卫星位置和测量时间延迟,可以计算出接收器与卫星之间的距离。
至少需要接收到4个卫星信号才能进行定位解算,因为每个卫星提供三个未知数(x、y、z三个坐标)和一个时间未知数。
其次,GPS导航系统通过导航电文提供的卫星轨道参数来计算卫星的精确位置。
每个卫星通过导航电文向接收器传递关于卫星识别码、卫星轨道和钟差等数据。
接收器使用这些参数来计算卫星的准确位置。
最后,通过定位解算算法,将接收器收到的卫星信号和导航电文中的轨道参数进行计算,可以确定接收器的位置。
定位解算算法主要有两种:三角测量法和最小二乘法。
三角测量法基于三角学原理,通过测量多个卫星与接收器之间的距离差异,然后根据这些距离差异以及卫星的位置信息来计算接收器的位置。
这种算法的优势是计算简单,但受到测量误差的影响较大。
最小二乘法是一种数学优化方法,通过最小化接收器位置与测量距离之间的误差平方和来求解接收器的位置。
该方法考虑到了测量误差的影响,并通过对多个卫星信号进行加权以提高解算的准确性。
除了上述的定位解算算法,GPS导航系统还使用了差分GPS和惯性导航等技术来提高定位精度和可靠性。
差分GPS通过接收器与参考站之间的信号比对,消除了大部分的误差,提高了定位精度。
惯性导航通过测量加速度和角速度来估计接收器的位移,可以在信号丢失或弱化的情况下提供连续的导航定位。
综上所述,GPS导航定位通过距离测量、导航电文和定位解算算法来确定接收器的位置。
通过接收到的卫星信号和导航电文中的轨道参数,定位解算算法能够计算出接收器的位置,并提供准确的导航信息。
GPS卫星定位坐标计算及程序设计GPS卫星定位是一种利用全球定位系统(GPS)卫星接收并处理信息来确定位置的技术。
它使用三个或更多GPS卫星的信号来计算接收器的位置。
GPS卫星发送包括时间和位置信息的无线电信号,接收器接收这些信号并通过计算信号的传播时间,确定接收器所在的位置。
GPS坐标系统使用经度和纬度来表示地理位置。
经度是指地球上其中一点距离本初子午线(格林尼治子午线)的角度,取值范围为0-180度,东经为正,西经为负。
纬度是指地球上其中一点距离赤道的角度,取值范围为0-90度,北纬为正,南纬为负。
通过计算GPS卫星的信号传播时间,我们可以确定接收器所在位置的经度和纬度,并将其表示为GPS坐标。
要进行GPS卫星定位坐标计算,可以按照以下步骤进行:1.获取GPS卫星信号:使用GPS接收器接收GPS卫星发送的信号。
每个GPS接收器一般都能接收多达24颗卫星的信号。
2.计算信号传播时间:通过记录信号发送和接收的时间差,可以计算出信号从卫星到达接收器的传播时间。
由于信号的传播速度是已知的(约为300,000公里/秒),可以根据传播时间计算出信号传播的距离。
3.确定卫星位置:由于我们知道每个GPS卫星的位置信息,可以根据信号传播距离计算出接收器和每个卫星之间的距离差。
通过多个卫星的距离差,可以确定接收器所在的位置。
4.计算经度和纬度:使用三角函数和数学模型,通过接收器和卫星之间的距离差,可以计算出接收器的经度和纬度。
5.显示位置信息:将计算得到的经度和纬度转换为可读的格式,并显示在GPS接收器或其他设备上。
1.数据传输:首先需要确保GPS接收器能够接收和传输卫星信号的数据。
可以使用串行通信接口(如RS-232)或USB接口,将接收器与计算机或其他设备连接起来。
2.数据接收和处理:编写程序来读取接收器传输的信号数据,包括卫星信号的传播时间、卫星位置信息等。
根据所选的编程语言和平台,可以使用相应的库和函数来实现数据读取和处理的功能。
GPS导航定位原理以及定位解算算法全球定位系统(GPS)是一种基于卫星导航的定位技术。
其基本原理是通过接收来自卫星系统的信号,并利用这些信号的时间差来计算接收器与卫星之间的距离,进而确定接收器的位置。
GPS定位原理:1.卫星信号发射:GPS系统由一组运行在地球轨道上的卫星组成。
这些卫星通过周期性地广播信号来与地面上的GPS接收器进行通信。
2.接收器接收信号:GPS接收器接收来自卫星的信号,一般至少需要接收到4颗卫星的信号才能进行定位。
3.信号延迟计算:GPS接收器通过测量信号从卫星发射到接收器接收的时间来计算信号的传播延迟,然后将延迟转换为距离。
4.距离计算:GPS接收器通过比较接收的信号与预先知道的卫星发射信号之间的时间差,进而计算出接收器与卫星之间的距离。
5.定位解算:通过同时计算接收器与多颗卫星之间的距离,可以确定接收器所在的位置。
这一过程通常使用三角测量或者多路径等算法来完成。
GPS定位解算算法:1.平面三角测量:这是一种常用的定位解算算法。
通过测量接收器与至少三颗卫星之间的距离,可以得到三个方程,从而确定接收器的位置。
2.弧长法:这一算法通过测量接收器与至少四颗卫星之间的距离,将每个卫星看作是一个弧线,然后通过计算不同卫星间弧线的交点来确定接收器的位置。
3.最小二乘法:这种算法将测量误差最小化,通过最小二乘法来计算接收器与卫星之间的距离和接收器的位置。
4.系统解算:该算法利用多个时间点上的观测数据,通过组合计算来减小误差,精确确定接收器的位置。
GPS定位解算算法根据具体的应用场景和精度要求有所不同,不同的算法有着各自的优缺点。
在实际应用中,通常结合多种算法进行定位,以提高精度。
同时,还可以通过使用差分GPS(DGPS)来消除大气延迟和接收器误差,进一步提高定位精度。
总结:GPS导航定位原理基于卫星信号的接收和测量,通过计算信号传播的时间差来确定接收器与卫星之间的距离,并通过不同的算法进行定位解算。
GPS卫星位置的计算【摘要】针对GPS卫星导航电文的特点和里边各种参数含义及用法,阐述了利用导航电文提供的数据计算卫星位置的方法,为进行基线解算时提供准确的卫星坐标数据。
0前言全球卫星定位系统(GPS)是一个实时的,全天候,全方位的定位系统。
设计此系统的最初目的只是为美国军事服务,如今却已扩展到诸多民用领域,包括民用导航与监控,交通管理,测绘科学与技术,土木工程,空间科学等等。
随着全球定位系统的不断改进,硬、软件的不断完善,应用领域正在不断地开拓。
1 GPS卫星导航电文GPS卫星的导航电文是用户用来定位和导航的数据基础。
它主要包括:卫星星历、时钟改正、电离层时延改正、工作状态信息及C/A码转换到捕获P码的信息。
这些信息是以二进制码的形式,按规定格式组成,按帧向外播送,卫星电文又叫数据吗。
它的基本单位是长1500bit的一个主帧,传输速率是50bit/s,30s 传送完毕一个主帧。
一个主帧包括5个子帧,第1、2、3子帧各有10个字码,每个字码有30bit;第4、5子帧各有25个页面,共有37500bit。
第1、2、3子帧每30s重复一次,内容每小时更新一次。
第4、5子帧是12.5min播完一次,然后再重复之,其内容仅在卫星注入新的导航数据后才得以更新。
导航电文文件数据记录节的格式说明如表1,表2,表3所示。
2 GPS卫星位置的计算方法第一步:计算卫星运动的平均角速度n。
首先根据导航文件给出的参数计算出参考时刻TOE的平均角速度:(2.1)GM=3.9860047×。
然后根据广播星历中给定的摄动参数△n计算观测时刻卫星的平均角速度nn=+△n (2.2)第二步:计算观测瞬间卫星的平近点角M(2.3)式中,为参考时刻TOE时的平近点角,由广播星历给出。
第三步:计算偏近点角用弧度表示的开普勒方程为:(2.4)第四步:计算真近点角(2.5)(2.6)(2.7)第五步:计算升交距角(2.8)式中为近地点角距,由导航文件给出。
gps定位原理公式GPS 定位原理公式,这可真是个挺复杂但又超级有趣的话题。
咱先来说说 GPS 定位的基本思路哈。
GPS 系统就像是天空中的一群“智能眼睛”,时刻盯着地球上的咱们。
它能告诉咱们在哪里,靠的就是一些神奇的原理和公式。
GPS 定位的核心原理就是通过测量卫星到接收机的距离,然后利用这些距离信息来确定接收机的位置。
这里面有个很关键的公式,叫“距离=速度×时间”。
想象一下,你在一个大广场上,头顶上有好几颗卫星在绕着地球转。
这些卫星就像是会发信号的“小飞侠”,它们会不断地向地球发送包含时间和位置等信息的信号。
咱们手里的 GPS 接收机呢,就像是一个超级灵敏的“信号捕捉器”。
当接收机接收到卫星信号的时候,它会对比卫星发送信号的时间和自己接收到信号的时间,这个时间差乘以光速,就能得到卫星到接收机的距离啦。
比如说,有一颗卫星在某个时刻发出了一个信号,说“我在这儿,时间是几点几分几秒”。
然后咱们的接收机过了一会儿收到了这个信号,一对比时间,发现中间隔了几毫秒。
因为光在真空中的速度是恒定的,所以用这个时间差乘以光速,就能算出接收机到这颗卫星的距离。
但是,光靠一颗卫星可定不准位置哦。
这就好比你只知道离一个人多远,可不知道他在哪个方向,还是找不到他。
所以得至少同时接收到四颗卫星的信号,才能准确地确定自己在地球上的位置。
我之前有一次出门自驾游,就全靠车上的 GPS 导航。
一开始还好好的,结果走到一个山区里,信号变得特别不稳定。
那时候心里那个着急呀,就怕迷路。
好在等开出山区,信号又恢复了,GPS 重新给我指明了方向,这才顺利到达目的地。
这 GPS 定位原理公式虽然听起来有点复杂,但其实在咱们的生活中真的太有用啦。
不管是开车导航、手机定位找地方,还是一些专业的测量工作,都离不开它。
总之,GPS 定位原理公式虽然藏在那些看似高深的科学知识里,但它实实在在地改变了咱们的生活,让咱们在这个大大的地球上不再容易迷路。
GPS定位公式
GPS定位的原理是基于卫星定位和三角测量的原理。
GPS系统由24颗
运行在地球轨道上的卫星组成,这些卫星分布在不同的高度和不同的轨道上。
接收器可以同时接收到多颗卫星的信号,并通过计算接收信号的时间
差和每颗卫星与接收器之间的距离,进而确定接收器的位置。
GPS定位的公式首先需要计算卫星与接收器之间的距离。
每颗卫星都
会发送一个包含时间信息的信号,接收器接收到这个信号后会计算发射和
接收之间的时间差。
由于光速是已知的,可以通过时间差和光速的乘积来
计算出距离。
接下来,需要计算卫星的具体位置。
每颗卫星都会通过无线电信号广
播自己的位置信息和精确的时钟时间。
接收器接收到这个位置信息后,可
以使用三角测量的原理计算出卫星的具体位置。
最后,通过找到至少4颗卫星的位置和距离信息,可以使用三角测量
的方法计算出接收器的位置。
三角测量方法会使用多边形的边长和角度来
计算出未知点的位置。
需要注意的是,GPS定位的公式是复杂的,涉及到很多数学和物理原理。
在实际应用中,通常会使用专门的GPS接收器来进行定位,这些接收
器会内置GPS定位算法,可以直接输出定位结果。
总的来说,GPS定位使用卫星信号和三角测量的原理来确定地理位置。
通过计算卫星与接收器之间的距离和卫星的位置信息,可以计算出接收器
的位置。
GPS定位的精度取决于多种因素,包括卫星数量和位置、信号传
播误差和接收器性能等。
GPS卫星坐标计算
GPS系统由全球定位系统(GPS)组成,包括24颗运行在近地轨道上的
人造卫星,地面控制台和GPS接收器。
这些卫星以精确的轨道方式固定的
环绕着地球,它们通过无线电波将时间和位置信息传输到地面的GPS接收器。
具体步骤如下:
1.接收卫星信号:GPS接收器会接收到至少4颗卫星发出的信号。
这
些信号包括卫星的位置信息、时间戳和卫星信号的延迟。
2.计算信号传播时间差:接收器通过比较接收到的卫星信号和接收器
内部的原子钟产生的时间信号之间的差异,计算出信号传播的时间差。
3.确定接收器与卫星的距离:通过信号传播时间差和光速
(299,792,458米/秒),可以计算出接收器与卫星之间的距离。
公式为:距离=时间差x光速。
4.计算接收器的位置:通过接收到的至少4个卫星的距离信息,可以
计算出接收器相对于卫星的位置。
每个卫星会提供一个球面坐标,通过这
些球面坐标的交点,可以确定接收器的位置。
5.校准接收器的时间:接收器内部的原子钟会有一定的误差,因此需
要通过接收到的卫星信号的时间戳来校准接收器的时间。
6.确定地球的形状和尺寸:GPS系统还会考虑地球的形状和尺寸,以
便更精确地确定接收器的位置。
通过考虑地球的椭球形状、重力场和大气
层对卫星信号的影响,可以提高GPS定位的精确度。
总结起来,GPS卫星坐标计算的过程涉及接收卫星信号、计算信号传播时间差、确定接收器与卫星的距离、计算接收器的位置、校准接收器的时间以及考虑地球的形状和尺寸等步骤。
通过这些计算,可以精确测量地球上其中一点的位置坐标。