液压与气动回路设计题解
绘制回路
?
八、绘制回路八、绘制回路
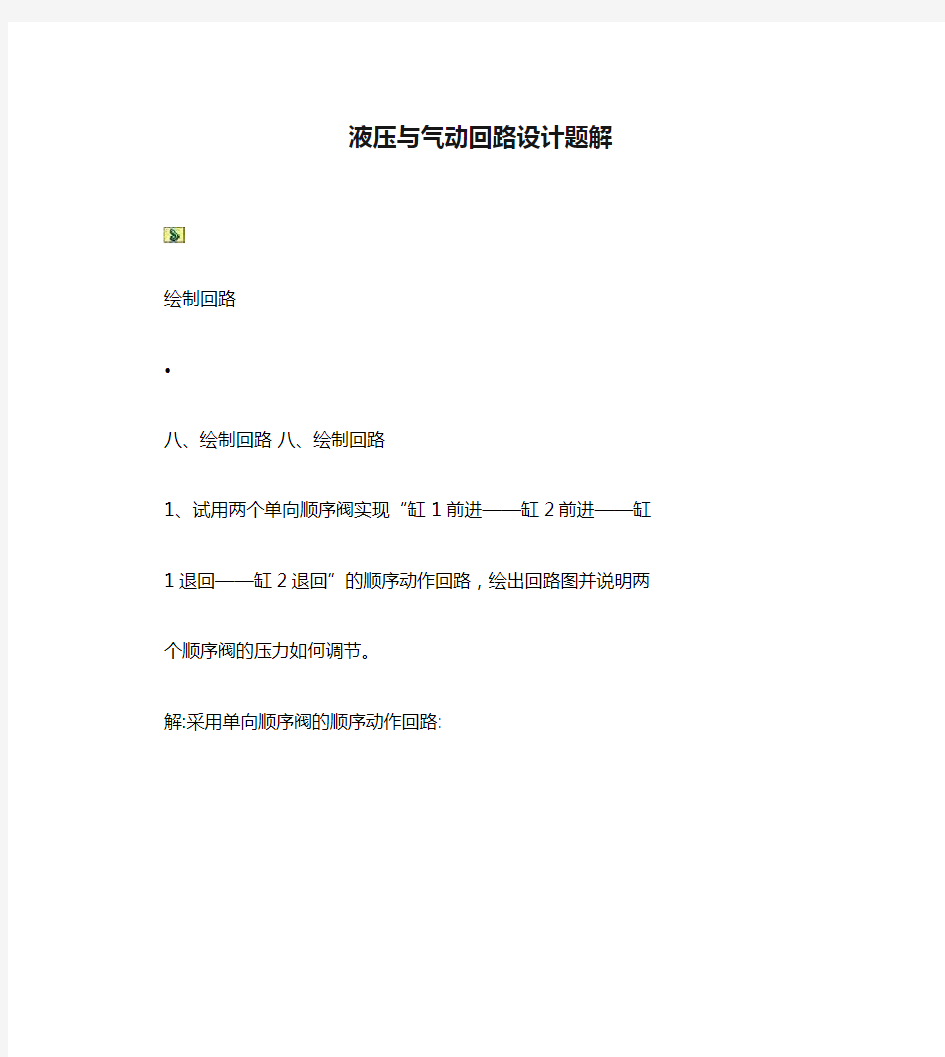
1、试用两个单向顺序阀实现“缸1前进——缸2前进——缸1退回——缸2退回”的顺序动作回路,绘出回路图并说明两个顺序阀的压力如何调节。
解:采用单向顺序阀的顺序动作回路:
返回上一级
1Y得电,缸1和缸2先后前进,2Y得电,缸1和缸2先
后退回。为此,p调定压力应比缸1工作压力高(10,15),;x1 p调定压力应高于缸1返回压力。 x2
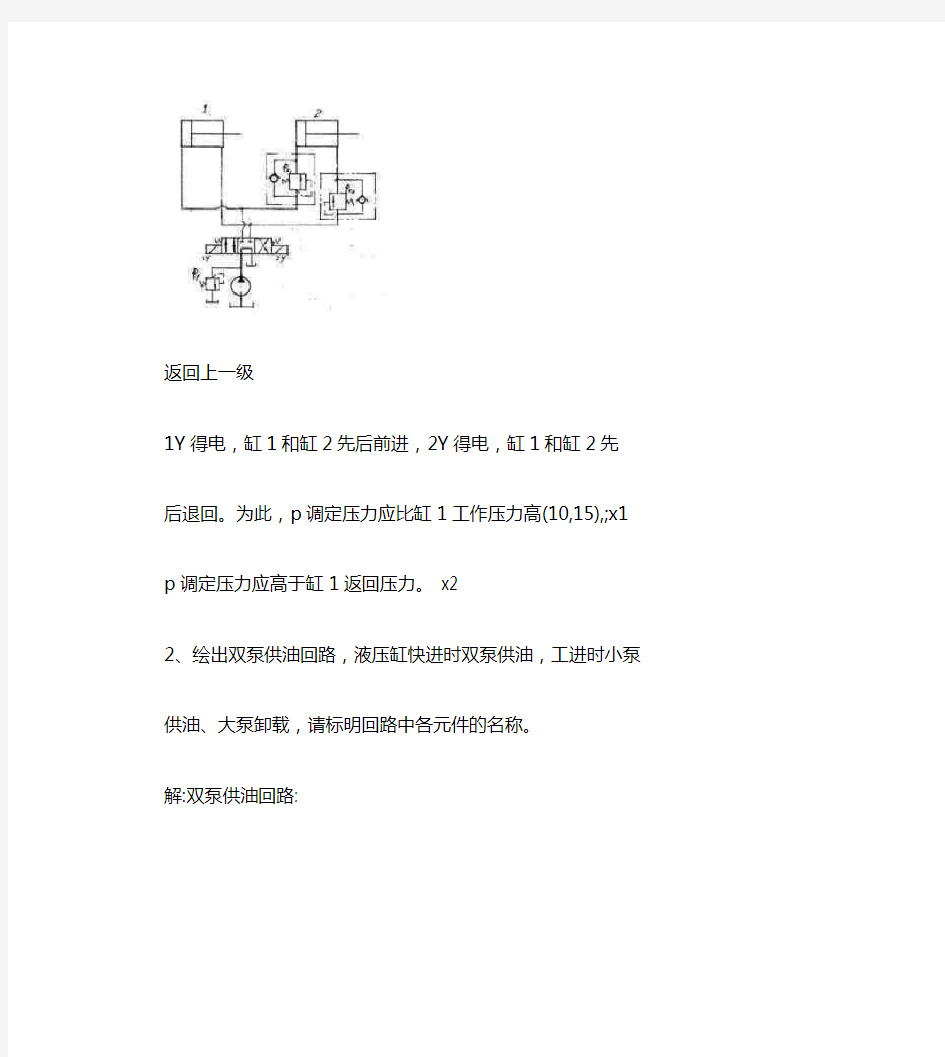
2、绘出双泵供油回路,液压缸快进时双泵供油,工进时小泵供油、大泵卸载,请标明回路中各元件的名称。
解:双泵供油回路:
1,大流量泵 2,小流量泵 3,卸载阀(外控内泄顺序阀) 4,单向阀
5,溢流阀 6,二位二通电磁阀 7,节流阀 8,液压缸
阀6电磁铁不得电时,液压缸快进,系统压力低于阀3、阀5调定压力,阀3、阀5均关闭,大、小流量泵同时向系统供油,q=qp+qp。 L12
阀6电磁铁得电,液压缸工进,系统压力为溢流阀5调定压力,阀3开启,大流量泵1卸载,溢流阀5开启,q?qp。 L23、用一个单向定向泵、溢流阀、节流阀、三位四通电磁换向阀组成一个双向进油节流调速回路。
解:
4、用一个单向定向泵、溢流阀、节流阀、三位四通电磁换向阀组成一个双向回油节流调速回路。
解:
5、试用单向定量泵、溢流阀、单向阀、单向变量马达各一个,组成容积调速回路。
解:
6、用一个单向定向泵、溢流阀、节流阀、三位四通电磁换向阀组成一个活塞双向旁路节流调速回路。
解:
7、用一个单向定向泵、溢流阀、单向节流阀、三位四通电磁换向阀组成一个活塞伸出过程的单向回油节流调速回路。解:
8、试用一个先导型溢流阀、一个二位二通电磁阀和一个远程调压阀组成一个二级调压回路,绘出回路图并简述工作原理。解:
(1)当1YA不通电,系统压力为P由先导型溢流阀控制 y1
(2)当1YA通电,系统压力为P 由远程调压阀控制 y2,
9、绘出三种不同的卸荷回路,说明卸荷的方法。解:
(1)换向阀卸荷回路 (2)溢流阀远程控制卸荷回路(3)中为机能卸荷回路
10、试用一个先导型溢流阀、一个二位二通换向阀组成一个卸荷回路。
解:
11、绘出一种换向阀中位使液压缸快速运动回路。解:
12、试用两个单向顺序阀实现“缸A前进——缸B前进——缸B退回——缸A 退回”的顺序动作回路,绘出回路图并说明两个顺序阀的压力如何调节。
解:采用单向顺序阀的顺序动作回路:
左位工作,缸A和缸B先后前进;右位工作,缸B和缸A先后退回。为此,p调定压力应比缸A工作压力高(10,15),;x1
p调定压力应高于缸A返回压力。 x2
13、试用一个先导型溢流阀、两个远程调压阀组成一个三级调压且能卸载的多级调压回路,绘出回路图并简述工作原理。解:
(1)当1YA不通电,系统压力为P由先导型溢流阀控制; y1
(2)当1YA通电,且2 YA通电,系统压力为P 由远程调y5,压阀5控制;
(3)当1YA通电,且3 YA通电,系统压力为P 由远程调y4,压阀4控制;
14、用三位四通手动滑阀、单向定量油泵、溢流阀、单杆双作用油缸设计一换向回路,中位油缸双向锁紧且油泵不卸荷。解:
15、用三位四通转阀、单向定量油泵、溢流阀、单杆双作用油
缸设计一换向回路,中位油缸双向锁紧且油泵不卸荷。
解:
16、用三位四通手动滑阀、单向定量油泵、溢流阀、单杆双作用油缸设计一换向回路,中位油缸双向锁紧且油泵卸荷。解:
17、用三位四通电磁滑阀、单向定量油泵、溢流阀、单杆双作用油缸设计一换向回路,中位油缸单向锁紧且油泵卸荷。解:
18、用二位四通手动滑阀、单向定量油泵、溢流阀、单向阀、单杆双作用油缸设计一换向回路,油缸直立放置、防止活塞自由下落。
解:
19、用三位四通手动滑阀、单向定量油泵、溢流阀、两个液控单向阀、单杆双作用油缸设计一换向回路,油缸直立放置、中位活塞长时间可靠双向锁紧。
解:
20、用二位四通电磁滑阀、单向定量油泵、溢流阀、单杆双作用油缸、行程开关,设计行程开关控制的连续往复运动回路。
解:
21、用二位四通电磁滑阀、单向定量油泵、溢流阀、双杆双作用油缸、压力继电器,设计压力继电器控制的连续往复运动回路。
解:
22、用二位四通手动滑阀、单向定量油泵、溢流阀两个、单杆双作用油缸,设计一双向调压回路。
解:
23、用二位四通电磁滑阀、单向定量油泵、溢流阀、二位二通电磁阀、双杆双作用油缸、压力继电器、蓄能器、单向阀,设计蓄能器与压力继电器保压的回路。
解:
24、用二位四通手动滑阀、单向定量油泵、溢流阀、单向阀、二位二通电磁阀、单杆双作用油缸,设计一卸荷回路。
解:
25、用三位四通O型电磁滑阀、单向定量油泵、溢流阀、卸荷阀、单向阀、蓄能器、单杆双作用油缸,设计一卸荷保压回路。解:
26、用三位四通M型电磁滑阀、单向定量油泵、溢流阀、直控单向平衡阀、单杆双作用油缸(直立),设计活塞下行时,由直控单向平衡阀控制的平衡限速回路。
解:
27、用三位四通M型电磁滑阀、单向定量油泵、溢流阀、远控单向平衡阀、单杆双作用油缸(直立),设计活塞下行时,由远控单向平衡阀控制的平衡限速回路。
解:
28、用三位四通M型电磁滑阀、单向定量油泵、先导式溢流阀一个、直动式溢流阀两个、单向阀两个、单杆双作用油缸,设
计活塞的双向缓冲回路。
解:
29、用双向变量油泵、溢流阀大、小各一个、单向阀四个、双向变量马达,设计双向变量油泵与双向变量液压马达的调速回路。
解: 30、用单向定量油泵、溢流阀一个、单向调速阀两个、单杆双作用油缸两个,三位四通M型电磁滑阀一个,设计两个油缸活塞同步缩回的同步回路。
解: 31、用单向定量油泵、溢流阀一个、单杆双作用油缸两个,三位四通M 型电磁滑阀一个,设计两个油缸活塞通过刚性梁实现同步运动的同步回路。
解:
32、用三位四通电磁滑阀两个、单向定量油泵一个、溢流阀一个、压力继电器四个、双杆双作用油缸两个,设计压力继
电器控制的顺序动作回路。
解: 33、用三位四通电磁滑阀两个、单向定量油泵一个、溢流阀一个、行程开关四个、双杆双作用油缸两个,设计行程控制的顺序动作回路。
解:
34、用二位四通电磁滑阀一个、二位四通行程滑阀一个、单向定量油泵一个、溢流阀一个、双杆双作用油缸两个,设计电磁换向阀与行程开关控制的顺序动作回路。
解:
基本气动回路 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】
换向回路 单作用气缸控制回路气缸活塞杆运动的一个方向靠压缩空气驱动,另一个方向则靠其他外力,如重力、弹簧力等驱动。回路简单,可选用简单结构的二位三通阀来控制 常断二位三通电磁 阀控制回路 通电时活塞杆 伸出,断电时靠弹 簧力返回 常通二位三通电磁 阀控制回路 断电时活塞杆 缩回,通电时靠弹 簧力返回 三位三通电磁阀控 制回路 控制气缸的换 向阀带有全封闭型 中间位置,可使气 缸活塞停止在任意 位置,但定位精度 不高 两个二位二通电磁阀 代替一个二位三通阀 的控制回路 两个二位二通电 磁阀同时通电换向, 可使活塞杆伸出。断 电后,靠外力返回 双作用气缸控制回路 气缸活塞杆伸出或缩回两个方向的运动都靠压缩空气驱动,通常选用二位五通阀来控制 采用单电控二位五 通 阀的控制回路 通电时活塞杆 伸出,断电时活塞 杆返回 双电控阀控制回路 采用双电控电 磁阀,换向信号可 以为短脉冲信号, 因此电磁铁发热 少,并具有断电保 持功能 中间封闭型三位五通 阀控制回路 左侧电磁铁通电 时,活塞杆伸出。右 侧电磁铁通电时,活 塞杆缩回。左、右两 侧电磁铁同时断电 时,活塞可停止在任 意位置,但定位精度 不高 中间排气型三位五 通阀控制回路 当电磁阀处于中 间位置时活塞杆处 于自由状态,可由 其他机构驱动 中间加压型三位阀控制回路 电磁远程控制回路双气控阀控制回路
采用二位五通气控阀作为主控阀,其先导控制压力用一个二位三通电磁阀进行远程控制。该回路可 以应用于有防爆等要求的特殊场合 主控阀为双气控二位五通阀,用两个二位三通阀作为主控阀的先导阀,可进行遥控操作 当左、右两侧电磁铁同时断电时,活塞可停止在任何位置,但定位精度不高。采用一个压力控制阀,调节无杆腔的压力,使得在活塞双向加压时,保持力的平衡 采用带有双活塞杆的气缸,使活塞两端受压面积相等,当双向加压时,也可保持力的平衡 双 作用 气缸控制回路采用两个二位三通 阀的控制回路 两个二位三通 阀中,一个为常通 阀,另一个为常断 阀,两个电磁阀同 采用一个二位三通 阀的差动回路 气缸右腔始终 充满压缩空气,接 通电磁阀后,左腔 进气,靠压差推动 带有自保回路的气动 控制回路 两个二位二通阀 分别控制气缸运动的 两个方向。图示位置 为气缸右腔进气。如 将阀2按下,由气孔 管路向阀右端供气, 使二位五通阀切换, 二位四(五)通阀 和二位 二通阀串接的控制 回路 二位五通阀起 换向作用,两个二 位二通阀同时动 作,可保证活塞停 止在任意位置。当
引言 CTP(Computer-to-plate)即脱机直接制版。CTP就是计算机直接到印版,是一种数字化印版成像过程。CTP直接制版机与照排机结构原理相仿。起制版设备均是用计算机直接控制,用激光扫描成像,再通过显影、定影生成直接可上机印刷的印版。计算机直接制版是采用数字化工作流程,直接将文字、图象转变为数字,直接生成印版,省去了胶片这一材料、人工拼版的过程、半自动或全自动晒版工序。以前CTP供版过程大部分靠人工来完成,而且版材位置容易摆放不准确,造成版材不同程度损伤,而且也大大增加了劳工费用。为了解决这一问题,提高CTP的自动化程度,我们在现有的CTP设备上面增加了一套外围自动供版设备,使供版更加的安全和效率,大大的省去了劳动力。该设备主要通过真空泵进行抽气,使抽气端达到真空负压,然后靠在版材附近的吸盘因真空引力来垂直吸附版材,同时排气端对上升一定角度的版材吹气,产生向上的气流,吹落可能连带吸起的版材或者衬纸。 真空泵吸附系统设计 一般真空吸附通过真空发生器进行吸附,如下图所示: 1-减压阀 2-真空供应电磁阀 3-气控换向阀 4-真空发生器 5-真空压力开关 6-过滤器 7-真空电磁破坏阀 8-消声器 9-工作缸
真空发生器系统原理图如图所示, 图中的PV 为供压口,真空供应电磁阀2 通电后,气控换向阀3 左端进气,压缩空气通过气控换向阀3 和真空发生器4 喷射,使真空吸取口Ⅰ产生负压吸住工件。当吸稳工件,真空度达到真空压力开关 5 所设定的压力时,则发出电信号,进行工作。当真空破坏电磁阀7 通电后(真空供应电磁阀2 同时断电),空气经真空破坏电磁阀7、密闭腔Ⅱ处进入真空吸附夹具密封腔,消除真空,释放工件。 但是由于我们要用真空泵来产生真空负压,并需要排气端对版材进行吹气,所以真空发生器无法满足要求。一般真空泵吸附物体的整个系统需要有过滤器,电磁阀,消声器等气动元件组成,为了满足真空泵抽气端吸气产生真空负压,排气端吹气产生正压,设计了2套不同气压回路,如图所示: 图1 图1这套回路主要有1-喷嘴、2-气泵、3-两位三通电磁阀、4-过滤器、5-气源、6-减压阀、7-压力表、8-单向阀、9-消音器、10-两位三通电磁阀、11-过滤器、12-吸盘组合、13-版材或者衬纸。当供版系统准备吸附版材时,2-真空泵和10-两位三通电磁阀通电工作,2-真空泵进行抽气,10-两位三通电磁阀换向。气体从12-吸盘进入,通过11-过滤器过滤掉外界气体中的杂质,防止气体的夹带的小颗粒物体损坏和堵塞后面的气动元件。然后推开9-单向阀,进入到6-减压阀,调节6-减压阀来控制回路中气体的压力,从来达到调节吸盘吸附力的效果。吹气时,3-两位三通电磁阀通电换向,气体由5-气源进入经过4-过滤器,对板材进行吹气;而12-吸盘处将不再进行抽气,8-单向阀防止气体回流,保持吸盘附近的回路的真空度。当供版过程完成时,10-两位三通电磁阀通电换向,由于1-吸盘处存在真空负压,气体将从9-消音器进入,调节吸盘中的气压,从而释放工件。为了防止泄气产生噪音加装了9-消声器,减轻整个系统的噪音。该回路的优点是可以调节流量和真空度,针对不同的吸附物体可以调节不同的吸附力,而且具有延时功能,能有效地对版材进行吹气;缺点是由于整个回路中各种气动元件容易产生泄露现象,回路比较复杂,系统协调程度要求比较高。
一、气动技术基本知识 1. 气动技术中常用的单位 1个大气压=760mmHg =1.013bar =101kpa 压力单位换算 1N/㎡=bar 105-=1002.17-?kgf/m ㎡=1002.15-?kgf/c ㎡ 1kgf/c ㎡=0.1Mpa 2. 气动控制装置的特点 ⑴空气廉价且不污染环境,用过的气体可直接排入大气 ⑵速度调整容易 ⑶元件结构紧凑,可靠性高 ⑷受湿度等环境影响小 ⑸使用安全便于实现过载保护 ⑹气动系统的稳定性差 ⑺工作压力低,功率重量比小 ⑻元件在行程中途停止精度低 3. 气动系统的组成 气动系统基本由下列装置和元件组成 (1)气源装置——气动系统的动力源提供压缩空气 (2)空气处理装置——调节压缩空气的洁净度及压力 (3)控制元件 方向控制元件——切换空气的流向 流量控制元件——调节空气的流量 (4)逻辑元件——与或非 (5)执行元件——将压力能转换为机械功 (6)辅助元件——保证气动装置正常工作的一些元件 压缩机 a )气源装置 储气罐 后冷却器 过滤器 油雾分离器 减压阀 b )空气调节 油雾器 处理装置 空气净化单元 干燥器 其它
电磁阀 气缸 气压控制阀 带终端开关气缸 方向控制阀 机械操作阀 带制动器气缸 手动阀 气缸 带锁气缸 其它 带电磁阀气缸 其它 速度控制阀 C )控制元件 速度控制阀 d )执行元件 节流阀 摆动缸 回转执行件 逻辑阀 空气马达 管子接头 消音器 e )辅助元件 压力计 其它 二、空气处理元件 压缩空气中含有各种污染物质。由于这些污染物质降低了气动元件的使用寿命。并且会经常造成元件的误动作和故障。表1列出了各种空气处理元件对污染物的清除能力。 1.空气滤清器 空气滤清器又称为过滤器、分水滤清器或油水分离器。它的作用在于分离压缩空气中的水分、油分等杂质,使压缩空气得到初步净化。 2.油雾分离器
气动技术基本知识 1. 气动技术中常用的单位 1个大气压=760mmHg = =101kpa 压力单位换算 ' 1N/㎡=bar 105-=1002.17-?kgf/m ㎡=1002.15-?kgf/c ㎡ 1kgf/c ㎡= 2. 气动控制装置的特点 ⑴空气廉价且不污染环境,用过的气体可直接排入大气 ⑵速度调整容易 ⑶元件结构紧凑,可靠性高 ⑷受湿度等环境影响小 。 ⑸使用安全便于实现过载保护 ⑹气动系统的稳定性差 ⑺工作压力低,功率重量比小 ⑻元件在行程中途停止精度低 3. 气动系统的组成 气动系统基本由下列装置和元件组成 (1)气源装置——气动系统的动力源提供压缩空气 ] (2)空气处理装置——调节压缩空气的洁净度及压力 (3)控制元件 方向控制元件——切换空气的流向 流量控制元件——调节空气的流量 (4)逻辑元件——与或非 (5)执行元件——将压力能转换为机械功 (6)辅助元件——保证气动装置正常工作的一些元件 、 压缩机 a )气源装置 储气罐
后冷却器 { 过滤器 油雾分离器 减压阀 b)空气调节油雾器 处理装置空气净化单元 干燥器 其它 . 电磁阀气缸 气压控制阀带终端开关气缸 方向控制阀机械操作阀带制动器气缸 手动阀气缸带锁气缸 其它带电磁阀气缸 其它 / 速度控制阀 C)控制元件速度控制阀d)执行元件 节流阀 摆动缸 回转执行件 逻辑阀 ) 空气马达 管子接头 消音器 e)辅助元件压力计 其它
[ 污染物质的去除能力 污染物质过滤器油雾分离器干燥器 水蒸气微小水雾微小油雾 { 水滴固体杂质 × × × ○ ○ " × ○ ○ ○ ○ ○ ○ : × ○ ×表1 二、空气处理元件 压缩空气中含有各种污染物质。由于这些污染物质降低了气动元件的使用寿命。并且会经常造成元件的误动作和故障。表1列出了各种空气处理元件对污染物的清除能力。 1.空气滤清器 ? 空气滤清器又称为过滤器、分水滤清器或油水分离器。它的作用在于分离压缩空气中的水分、油分等杂质,使压缩空气得到初步净化。 ) 2.油雾分离器 油雾分离器又称除油滤清器。它与空气滤清器不同之处仅在于所用过滤元件不同。空气滤清器不能分离油泥之类的油雾,原因是当油粒直径小于2~3цm 时呈干态,很难附着在物体上,分离这些微粒油雾需用凝聚式过滤元件,过滤元件的材料有: 1){ 2)活性炭 3)用与油有良好亲和能力的玻璃纤维、纤维素等制成的多孔滤芯 3.空气干燥器 为了获得干燥的空气只用空气滤清器是不够的,空气中的湿度还是几乎达100%。当湿度降时,空气中的水蒸气就会变成水滴。为了防止水滴的产生,在很多情况下还需要使用干燥器。干燥器大致可分为冷冻式和吸附式两类。
其它气动回路 在气动系统中除了换向回路、速度控制回路和压力控制回路外,根据工作要求,还经常使用下列一些回路。 一、气液联动回路 目的:把气压传动转换为液压传动,这就使执行件的速度调节更加稳定.运动干稳。若采用气液增压回路,则还能得到更大的推力。气液联动回路装置简单,经济可靠。 1.气液速度控制回路 1)气液转换器 说明:执行元件3是液压缸;1、2是气液转换器。 作用:气压→液压,获得平稳易控制的活塞运动速度 调速:供气节流调速 注意:气液转换器中贮油量应不少于液压缸有效容积的1.5倍,同
时需注意气液间的密封,以避免气体混入油中。 2)气—液阻尼缸 在这种回路中,用气缸传递动力,由液压缸阻尼和稳速,并由液压缸和调速机构进行调速。由于调速是在液压缸和油路中进行的,因而调速精度高、运动速度平稳。因此,这种调速回路应用广泛,尤其在金属切削机床中用得最多。 图中所示为串联型气液阻尼缸双向调速回路。由换向阀1控制气液阻尼缸2的活塞杆前进与后退,阀3和阀4调节活塞杆的进、退速度,油杯5起补充回路中少量漏油的作用。 2.气液增压回路 当工作时既要求工作平稳,又要求有很大的推力时,可用气液增压回路。
1)气液增压缸:较低的气压→较高的液压力。该回路中用单向节流阀调节 2)气液缸:工进(右行)液压驱动,返回时用气压驱动。 二、安全保护回路 由于气动执行元件的过载、气压的突然降低以及气动执行机构的快速动作等原因,都可能危及操作人员或设备的安全。因此,在气动回路中,常常要加入安全回路。 l. 双手操作安全回路 所谓双手操作回路就是使用两个启动用的手动阀,只有同时按动这两个阀时才动作的回路。这在锻压、冲压设备中常用来避免误动作,以保护操作者的安全及设备的正常工作。
气动控制技术—速度控制回路 教案首页
课题:速度控制回路 课前准备: 1、气动实训一体化装置26台; 2、计算机26套,多媒体投影仪1台,云台摄像头系统1套; 3、常用电工工具、六角扳手各26套。 授课内容: 时间 教学内容和过程备注 2分钟 考勤、填写教学日志,调节课堂气氛,调动学生主动参与课堂, 创造和谐活泼课堂,做好接受新知识的准备工作。让学生把下课的心放到课堂上来,用故事、激励、表扬等方法实现。 5分钟 教师提问:1、我们前面所学的气动控制基本回路有哪几种? 学生回答:方向控制回路、压力控制回路 教师提问:2、常见控制阀的图形符号有哪些? 学生上黑板画或由教师画出符号,学生回答符号代表的意思和所 起的作用复习前面所学的控制回路,巩固所学的知识。 复习几种常见控制阀符号和作用,为新课做铺垫。 6分钟 让学生观看自动化生产线工件加工过程的视频,总结出工作台的动作过程。假如你们是工程技术人员,现在要你设计一台气动传动的机床,要求这台机床工作时自动刀架先带刀具快速接近工件,后以慢速工进,对工件进行加工,加工完快速退回原处。那么你启发学生,引导学生思考,让学生各抒己见,不一定要用课本的知识,只要有自己的见解或是创造性思维的就给予表扬,然后引入本课内容举例、演示、情境教学,让学生有主人翁的感觉。设疑,引起学生的兴趣。 一、组织教学 二、复习回顾 三、任务引入
们如何设计才能满足这种要求呢? 12分 钟 一、快进回路 二、工进回路 三、快退回路用逐步演示动画的方式让学生清清楚楚地看到速度控制回路的工作过程,对其原理及工作过程进行详细的分析。答疑,前面在导入新课时所设的问题这里给了明确的答复。 四、任务分析