PCI驱动编程基本框架
- 格式:doc
- 大小:154.00 KB
- 文档页数:16
PCI编程指南【认识PCI】PCI是一种总线的名称,英文全称为Peripheral Component Interconnect。
PCI局部总线是微型计算机上处理器/存储器与外围控制部件、外围附加板之间的互连机构。
打开你的PC机箱,即可看到PCI插槽。
俺的PC里还有一个ISA插槽,好像现在的PC机都只有PCI插槽了。
PCI技术最初由Intel在1995年提出,所以它是little endian的。
PCI标准规范由PCI SIG组织维护,不过这个规范可不是免费的。
基本的PCI接口规范是3V、33MHz、32位总线,数据传输速率是133Mb/s。
PCI还有其它的扩展:64位总线扩展:数据传输速率为266Mb/s;66MHz扩展等。
AGP:Accelerated Graphics Port,专门为视频卡设计。
PC机里插显卡的那个槽就是AGP槽了。
66MHz,最大传输速率可达1064Mb/s。
从编程角度看AGP完全等效于PCI。
cPCI:Compact PCI。
一种基于PCI标准的高性能工业总线。
和标准桌面的PCI相比,cPCI 提供2倍的PCI插槽(8:4),并提供热插拔机制,更适合于工业应用。
从编程角度看CPCI 完全等效于PCI。
工业上的PCI/cPCI机箱价格不菲,有的高达几万美金。
PXI:PXI规范是NI公司1997年9月1日发布的一种新的开放性、模块化仪器总线规范,是PCI总线在仪器领域的扩展。
/whatnew/pxi.htm【PCI编程概念】PCI设备是真正的“plug-and-pl ay”。
PCI设备的参数可以被程序动态地读写。
可配置的参数出现在PCI配置空间中。
PCI设备可以访问三类地址空间:PCI的I/O空间、PCI的存储空间和PCI的配置空间。
(参考《Linux编程白皮书》、《Linux设备驱动程序》。
)memory space实际上是和内存统一编址的,用普通的C语句就可以访问。
x86 CPU能够使用inb/outb等指令访问I/O空间;PowerPC则需要把设备的寄存器映射到内存空间中,进行统一编址。
⼀、如何编写LinuxPCI驱动程序PCI的世界是⼴阔的,充满了(⼤部分令⼈不快的)惊喜。
由于每个CPU体系结构实现不同的芯⽚集,并且PCI设备有不同的需求(“特性”),因此Linux内核中的PCI⽀持并不像⼈们希望的那么简单。
这篇简短的⽂章介绍⽤于PCI设备驱动程序的Linux APIs。
1.1 PCI驱动程序结构PCI驱动程序通过pci_register_driver()在系统中"发现"PCI设备。
事实上,恰恰相反。
当PCI通⽤代码发现⼀个新设备时,具有匹配“描述”的驱动程序将被通知。
详情如下。
pci_register_driver()将设备的⼤部分探测留给PCI层,并⽀持在线插⼊/删除设备[因此在单个驱动程序中⽀持热插拔PCI、CardBus和Express-Card]。
pci_register_driver()调⽤需要传⼊⼀个函数指针表,从⽽指⽰驱动程序的更⾼⼀级结构体。
⼀旦驱动程序知道了⼀个PCI设备并获得了所有权,驱动程序通常需要执⾏以下初始化:启⽤设备请求MMIO / IOP资源设置DMA掩码⼤⼩(⽤于⼀致性DMA和流式DMA)分配和初始化共享控制数据(pci_allocate_coherent())访问设备配置空间(如果需要)注册IRQ处理程序(request_irq())初始化non-PCI(即LAN/SCSI/等芯⽚部分)启⽤DMA /处理引擎当使⽤设备完成时,可能需要卸载模块,驱动程序需要采取以下步骤:禁⽌设备产⽣irq释放IRQ (free_irq())停⽌所有DMA活动释放DMA缓冲区(包括流式DMA和⼀致性DMA)从其他⼦系统注销(例如scsi或netdev)释放MMIO / IOP资源禁⽤该设备下⾯⼏节将介绍这些主题中的⼤部分。
其余部分请查看LDD3或<linux/pci.h>。
如果PCI⼦系统没有配置(没有设置CONFIG_PCI),下⾯描述的⼤多数PCI函数都被定义为内联函数,要么完全空,要么只是返回⼀个适当的错误代码,以避免在驱动程序中出现⼤量ifdefs。

AbstractWith the rapid development of Internet technology, the security issues of network information become acute increasingly. Network information security should be a height priority to protect people's livelihood, national security in this era of global Internet.A hardware encryption network card is designed to keep network information security. To ensure network information security, the user data was encrypted and then transmitted through the public Internet. The driver and application of encryption network card in the Linux system was discussed in this paper.This program is based on Ubuntu16.04 system, Linux4.4 kernel. The application is based on Qt. This paper introduces the knowledge about Linux driver, TCP/IP protocol, PCI-e and DMA first, as well as the hardware structure of the encryption card. And then discuss the study of the encryption network card application system, focusing on the design of encryption card driver and the application. Int the end of the paper, the test of the driver and the application will be talked about.Encryption card is a low-cost efficient solutions to keep network information security. Developping drivers and applications base on the Linux system conform to the the ideological line to develop domestic operating system based on the Linux kernel under the background of vigorously developping domestic operating system, and conducive to the promotion of Linux system. When the domestic operating system matures and promote the use, it is easy to transplant the program into the domestic operating system.Keywords: encryption network card; Linux; driver; application; PCI-e;DMA目 录中文摘要 (I)Abstract ............................................................................................................................. I I 第1章绪论 . (1)1.1 课题研究的背景 (1)1.2 课题研究的意义 (2)1.3 国内外研究现状 (3)1.4 论文的内容及组织结构 (4)第2章基础知识 (6)2.1 Linux驱动程序概述 (6)2.1.1 Linux驱动程序的分类 (6)2.1.2 Linux设备驱动的模块化 (7)2.2 TCP/IP协议介绍 (7)2.2.1 以太网数据封装 (7)2.2.2 以太网首部 (8)2.2.3 IP协议首部 (9)2.2.4 UDP协议首部 (10)2.2.5 TCP协议首部 (10)2.3 PCI-e/PCI总线 (11)2.3.1 PCI/PCI-e设备的初始化过程 (12)2.3.2 PCI-e总线配置空间 (14)2.3.3 PCI-e的MSI中断 (17)2.4 PCI/PCI-e设备DMA传输分析 (18)2.5 加密网卡硬件结构介绍 (19)2.5.1 加密网卡总体结构介绍 (19)2.5.2 FPGA数据接收发送链路结构介绍 (21)2.6 本章小结 (21)第3章加密网卡应用系统设计 (22)3.1 系统总体结构设计 (22)3.2 驱动程序结构设计 (23)3.2.1 驱动程序功能模块设计 (23)3.2.2 数据加密设计 (24)3.3 应用程序结构设计 (25)3.3.1 应用程序server端设计 (25)3.3.2 应用程序client端设计 (26)3.3.3 应用层数据封包格式设计 (28)3.4 本章小结 (28)第4章驱动程序设计 (29)4.1 驱动程序加载和卸载 (29)4.1.1 PCI-e驱动程序和设备的匹配 (29)4.1.2 PCI-e驱动程序的加载和卸载 (30)4.1.3 设备初始化和关闭 (31)4.2 Linux下的DMA编程 (34)4.2.1 DMA地址掩码 (35)4.2.2 DMA地址映射 (36)4.3网络设备的注册和初始化 (38)4.3.1 网络设备的注册和移除 (38)4.3.2 网络设备初始化流程 (39)4.4 网络设备的打开和关闭 (41)4.5 网络设备中断处理设计 (43)4.6 网络数据的接收和发送 (44)4.6.1 struct sk_buff结构体 (44)4.6.2 数据发送流程 (46)4.6.3 数据接收流程 (50)4.7 物理链路连接状态检测 (52)4.8 字符设备程序设计 (54)4.8.1 字符设备注册 (55)4.8.2 字符设备操作方法设计 (56)4.9 本章小结 (58)第5章应用程序设计 (59)5.1 视频及文件传输程序设计 (59)5.1.1 应用层协议设计 (59)5.1.2 client端与server端连接的建立流程 (62)5.1.3 视频码流处理框架设计 (63)5.1.4 环形缓冲区的设计 (64)5.1.5 视频传输流程设计 (68)5.1.6 文件传输流程设计 (69)5.2 秘钥管理程序设计 (70)5.3 系统测试 (71)5.3.1 网卡传输速率测试 (71)5.3.2 数据加密传输测试 (74)5.4 本章小结 (76)结论 (77)参考文献 (78)致谢 (84)攻读硕士学位期间发表的学术论文 (85)独创性声明 (86)第1章绪论1.1 课题研究的背景进入21世纪以来,互联网技术得到了长足的发展和进步。
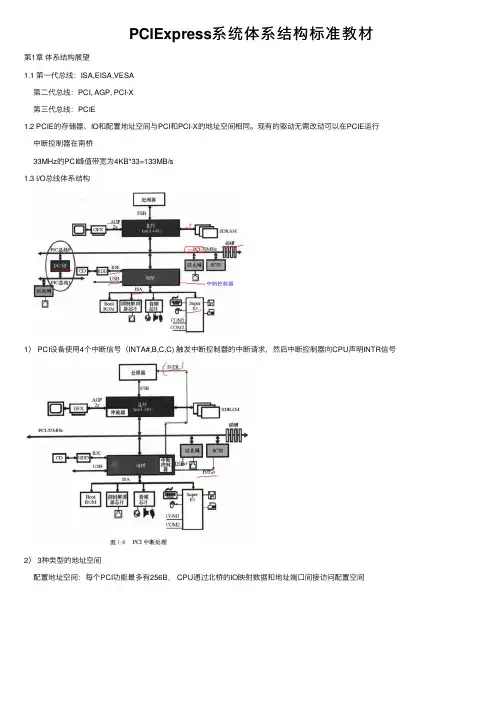
PCIExpress系统体系结构标准教材第1章体系结构展望1.1 第⼀代总线:ISA,EISA,VESA第⼆代总线:PCI, AGP, PCI-X第三代总线:PCIE1.2 PCIE的存储器、IO和配置地址空间与PCI和PCI-X的地址空间相同。
现有的驱动⽆需改动可以在PCIE运⾏中断控制器在南桥33MHz的PCI峰值带宽为4KB*33=133MB/s1.3 I/O总线体系结构1) PCI设备使⽤4个中断信号(INTA#,B,C,C) 触发中断控制器的中断请求,然后中断控制器向CPU声明INTR信号2) 3种类型的地址空间配置地址空间:每个PCI功能最多有256B, CPU通过北桥的IO映射数据和地址端⼝间接访问配置空间3)最新⼀代的intel PCI芯⽚组,把南北桥换成了MCH, ICH4)PCI-X ⽐PCI 频率更⾼,PCI-X设备可以插⼊PCI插槽,反之亦然。
PCI-X 峰值达到1064MB/s第2章体系结构概述2.1 PCIE 事务通信涉及处理层数据包(Transaction Layer packet, TLP) 的收发PCIE事务包括:1)存储器事务,2)IO事务,3)配置事务,4)消息事务2.2 PCIE的设备层有处理层,数据链路层,物理层;对应的数据包为TLP, DLLP, PLP1)处理层有虚拟信道缓冲区(VC缓冲区),流控,TLP排序,QoS也在此层(PCI不⽀持QoS);缓冲区⽤于数据的收发,流控避免缓冲区溢出;流控是硬件⾃动管理的;QoS 指的是以不同的优先级,确定的延迟及带宽路由不同应⽤程序的数据包通过结构的能⼒。
如视频对时间要求⾼,SCSI对正确性要求⾼,所以视频数据包的优先级⾼。
VC仲裁会优先通过视频数据包 2)流量类别TC,是数据包的⼀个TLP头字段, TC会映射到虚拟信道VC可实现最多8个VC缓冲区,2.3 ⾮报告存储器读事务两个阶段:请求者发送存储器读请求TLP给完成者;接收来⾃完成者的带数据的完成。
目录一、字符设备和块设备 (2)二、设备驱动程序接口 (2)三、设备驱动程序模块 (3)四、设备驱动程序结构 (4)1.驱动程序的注册与注销 (4)2.设备的打开与释放 (4)3.设备的读写操作 (4)4.设备的控制操作 (5)5.设备的中断和轮询处理 (5)五、PCI驱动程序框架 (5)1.关键数据结构 (5)a. pci_driver (5)b. pci_dev (6)2.基本框架 (9)六、框架的具体实现之模块操作 (12)1.struct pci_device_id (12)2.初始化设备模块 (12)3.卸载设备模块: (15)4.中断处理: (16)七、框架的具体实现之设备文件操作 (16)1.设备文件操作接口 (16)2.打开设备模块 (17)3.释放设备模块 (17)4.设备数据读写和控制信息模块 (18)5.内存映射模块 (19)八、附录 (19)1.PCI设备私有数据结构 (19)2.PCI配置寄存器 (20)参考资料: (21)一、字符设备和块设备Linux抽象了对硬件的处理,所有的硬件设备都可以像普通文件一样来看待:它们可以使用和操作文件相同的、标准的系统调用接口来完成打开、关闭、读写和I/O控制操作,而驱动程序的主要任务也就是要实现这些系统调用函数。
Linux系统中的所有硬件设备都使用一个特殊的设备文件来表示,例如,系统中的第一个IDE硬盘使用/dev/hda表示。
每个设备文件对应有两个设备号:一个是主设备号,标识该设备的种类,也标识了该设备所使用的驱动程序;另一个是次设备号,标识使用同一设备驱动程序的不同硬件设备。
设备文件的主设备号必须与设备驱动程序在登录该设备时申请的主设备号一致,否则用户进程将无法访问到设备驱动程序。
在Linux操作系统下有两类主要的设备文件:一类是字符设备,另一类则是块设备。
字符设备是以字节为单位逐个进行I/O操作的设备,在对字符设备发出读写请求时,实际的硬件I/O紧接着就发生了,一般来说字符设备中的缓存是可有可无的,而且也不支持随机访问。
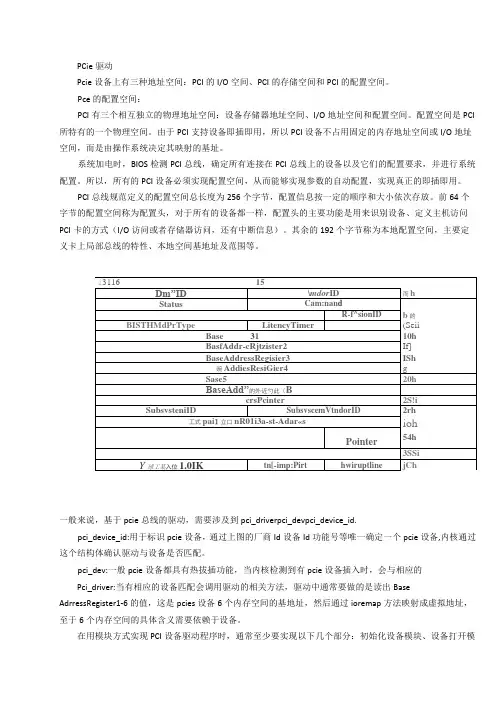
PCie驱动Pcie设备上有三种地址空间:PCI的I/O空间、PCI的存储空间和PCI的配置空间。
Pce的配置空间:PCI有三个相互独立的物理地址空间:设备存储器地址空间、I/O地址空间和配置空间。
配置空间是PCI 所特有的一个物理空间。
由于PCI支持设备即插即用,所以PCI设备不占用固定的内存地址空间或I/O地址空间,而是由操作系统决定其映射的基址。
系统加电时,BIOS检测PCI总线,确定所有连接在PCI总线上的设备以及它们的配置要求,并进行系统配置。
所以,所有的PCI设备必须实现配置空间,从而能够实现参数的自动配置,实现真正的即插即用。
PCI总线规范定义的配置空间总长度为256个字节,配置信息按一定的顺序和大小依次存放。
前64个字节的配置空间称为配置头,对于所有的设备都一样,配置头的主要功能是用来识别设备、定义主机访问PCI卡的方式(I/O访问或者存储器访问,还有中断信息)。
其余的192个字节称为本地配置空间,主要定义卡上局部总线的特性、本地空间基地址及范围等。
一般来说,基于pcie总线的驱动,需要涉及到pci_driverpci_devpci_device_id.pci_device_id:用于标识pcie设备,通过上图的厂商Id设备Id功能号等唯一确定一个pcie设备,内核通过这个结构体确认驱动与设备是否匹配。
pci_dev:一般pcie设备都具有热拔插功能,当内核检测到有pcie设备插入时,会与相应的Pci_driver:当有相应的设备匹配会调用驱动的相关方法,驱动中通常要做的是读出Base AdrressRegister1-6的值,这是pcies设备6个内存空间的基地址,然后通过ioremap方法映射成虚拟地址,至于6个内存空间的具体含义需要依赖于设备。
在用模块方式实现PCI设备驱动程序时,通常至少要实现以下几个部分:初始化设备模块、设备打开模块、数据读写和控制模块、中断处理模块、设备释放模块、设备卸载模块。
PCI网卡驱动程序分析驱动程序的架构通常包括以下几个模块:初始化模块、数据传输模块、中断处理模块和控制模块。
初始化模块负责识别和配置网卡,并进行必要的初始化操作。
数据传输模块负责处理数据的收发,包括数据的发送和接收。
中断处理模块用于处理网卡发出的中断信号,通知操作系统有数据可处理。
控制模块负责向网卡发送命令以及接收网卡的状态信息。
在操作系统启动时,PCI网卡驱动程序会加载到内核中,并通过操作系统提供的接口进行初始化。
驱动程序首先会进行设备识别,通过读取设备的PCI配置空间来获取设备的基本信息,如设备ID、厂商ID等。
然后驱动程序会检测设备的状态并进行必要的配置,如设置中断向量和启用设备。
初始化完成后,驱动程序会注册中断处理函数,以便在网卡有数据到达时能及时响应。
数据传输模块负责处理数据的收发。
在接收数据时,驱动程序会设置网卡的接收缓冲区,并等待中断信号。
当网卡接收到数据后,会触发一个中断信号,驱动程序会响应该中断并读取网卡的接收缓冲区来获取数据。
在发送数据时,驱动程序会设置网卡的发送缓冲区,并将数据写入该缓冲区。
然后驱动程序会发送一个命令给网卡,通知其开始发送数据。
发送完成后,网卡会触发一个中断信号,驱动程序会响应该中断并检查发送状态。
中断处理模块用于处理网卡发出的中断信号。
当网卡有数据到达或发送完成时,会触发一个中断信号。
驱动程序会通过中断控制器来识别该中断,并调用相应的中断处理函数。
中断处理函数会读取网卡的状态信息,如接收缓冲区中的数据长度、发送状态等,并进行相应的处理。
控制模块用于向网卡发送命令以及接收网卡的状态信息。
驱动程序会向网卡发送各种命令,如启动接收、停止接收、启动发送等。
同时,驱动程序也会定期检查网卡的状态信息,如发送缓冲区是否可用、接收缓冲区中是否有数据等。
在分析PCI网卡驱动程序时,还需要考虑一些其他的因素,如总线传输、内存管理、中断处理竞争等。
总线传输是指驱动程序通过PCI总线与网卡进行数据传输的过程,包括地址传输、数据传输等。
plc编程框架和思路PLC编程框架和思路PLC(可编程逻辑控制器)是一种广泛应用于工业自动化领域的控制设备。
在实际应用中,PLC编程框架和思路的设计对于保证系统稳定性、可靠性和扩展性具有重要意义。
本文将介绍PLC编程框架和思路的基本要点和注意事项。
一、PLC编程框架的基本要点1. 确定系统需求:在开始编写PLC程序之前,首先要明确系统的需求和功能。
这包括对输入输出设备的定义、控制逻辑的设计以及相应的操作界面等。
明确系统需求有助于后续编程的规划和设计。
2. 分析系统结构:根据系统需求,将系统模块化,确定各个模块之间的关系和交互方式。
这有助于确保PLC程序的结构清晰、易于维护和扩展。
3. 设计程序结构:PLC程序的结构通常包括主程序和子程序。
主程序负责整体控制逻辑,而子程序则用于实现不同的功能模块。
在设计程序结构时,应该合理划分子程序,使得每个子程序的功能单一、结构清晰。
4. 制定编程规范:在编写PLC程序之前,应该制定相应的编程规范。
编程规范包括编程风格、变量命名规范、注释要求等。
合理的编程规范有助于提高代码的可读性和可维护性。
5. 编写程序代码:根据系统需求和程序结构,编写PLC程序代码。
在编写过程中,应该注重代码的可读性和可维护性,避免使用复杂的逻辑和冗余的代码。
6. 调试和测试:在编写完程序之后,需要进行调试和测试。
通过模拟输入输出信号,验证程序的正确性和稳定性。
如果发现问题,应及时进行调试和修复。
二、PLC编程思路的注意事项1. 理清控制逻辑:在编写PLC程序时,应该理清控制逻辑,避免出现死循环、逻辑错误等问题。
控制逻辑应该简单明了,易于理解和维护。
2. 合理运用定时器和计数器:PLC编程中,定时器和计数器是常用的控制元件。
合理运用定时器和计数器有助于实现复杂的控制逻辑和时序控制。
3. 异常处理和报警机制:在编写PLC程序时,应该考虑异常情况的处理和报警机制。
合理的异常处理和报警机制能够及时发现问题并采取相应的措施,提高系统的安全性和可靠性。
PCI卡有一个特殊的空间叫配置空间.该空间记录卡的中断,输入输出地址,内存映射,总线速度等一些PCI卡的信息.PCI的配置空间最多256字节,而PCI2.1标准规定的空间只有64字节,就是0x00-0x3F.RTL8019AS支持PCI2.1版本.所以空间只有64字节.超过64字节的空间0x40-0xFF为保留的.PCI配置空间的读出内容如下:PCI卡在复位之后(上电之后),它是处于待机状态的,卡属于禁止状态,就是说它还不能进行I/O或内存地址译码.必须先对它进行配置,才可以开始工作.配置就是对PCI配置空间进行一些读写的操作.对RTL8029As来说,最重要的有几个配置寄存器,一个是BAR,一个是Command.分别介绍.BAR:Base Address Register,地址译码寄存器,位于PCI配置空间的10-13H,读出内容如下:bit 31-5 :BAR31-5,在还没有进行设置之前,读出值是一个不确定的值.bit 4-2 :IOSIZE只读,为0,表示地址译码的大小为32个地址bit 1:只读,为0bit 0:IOIN ,只读,为1 ,表示该地址译码为I/O地址空间的译码.初始化的时候向该寄存器写入全0就可以了.写入全0之后,网卡的译码地址为: 0x00000000--0x0000001F 译码空间为I/O地址空间.可以看到网卡的32位的I/O地址译码的高3个字节是0,只有低位字节是需要变化的.那么在PCI的接口逻辑的设计里,我们可以固定高3个字节的地址为0,然后只变化低位字节的地址.这样可以大大简化接口逻辑.同时也简化单片机对PCI总线的操作.可以看到网卡的译码地址是I/O空间的地址译码,而没有内存地址的译码.那么对PCI卡进行内存译码的操作和接口是可以省略的.在我的PCI接口逻辑里,为了简化设计,没有进行内存地址寻址的逻辑设计.我的设计只支持PCI配置空间寻址和I/O地址空间寻址.I/O地址寻址空间也限制在0x00000000--0x000000FF范围内,最多支持256个I/O地址.而RTL8029AS只用了其中的32个地址.设置完BAR之后,网卡实际上还没有开始工作. 还需要设置命令寄存器.命令寄存器中只有最低位是可以写的,其他为只读.需要向该位IOEN写入1, 网卡才开始进行地址译码.设置完这两个寄存器,网卡就可以开始工作了.开始工作之后,不需要再进行PCI 配置空间的读写.为了简化用户的程序设计,我提供了6个函数用来进行PCI接口的驱动.两个进行PCI配置空间读写的函数:unsigned long read_config(unsigned char address)/*PCI 配置寄存器读,地址address必须是4的倍数0,4,8。
uboot pcie驱动原理摘要:1.PCIe驱动概述2.Uboot中PCIe驱动的实现3.PCIe驱动的应用场景和优势4.总结正文:【1】PCIe驱动概述PCIe(Peripheral Component Interconnect Express)是一种高速串行计算机扩展总线标准,主要用于连接主板上的中央处理器(CPU)和各种外部设备,如显卡、声卡、网卡等。
PCIe驱动程序是操作系统中用于控制和管理PCIe设备的软件模块,它负责实现设备与CPU之间的数据传输和通信。
【2】Uboot中PCIe驱动的实现Uboot是一种通用的bootloader程序,广泛应用于嵌入式系统。
在Uboot中,PCIe驱动程序主要包括以下几个部分:1.设备树(Device Tree):描述了系统中PCIe设备的基本信息和配置。
2.PCIe设备驱动框架:提供了一组通用的API,用于实现PCIe设备的访问和控制。
3.具体设备驱动:根据不同PCIe设备的特性,编写相应的设备驱动模块。
4.初始化与退出:在系统启动时,初始化PCIe设备并提供相应的驱动;在系统退出时,正确地卸载和关闭设备。
【3】PCIe驱动的应用场景和优势1.应用场景:PCIe驱动广泛应用于服务器、工作站、嵌入式设备等领域,支持多种硬件设备和外设的接入。
2.优势:- 高带宽:PCIe总线支持多种数据传输速率,如Gen1(2.5 GT/s)、Gen2(5.0 GT/s)和Gen3(8.0 GT/s)等,满足高性能设备的需求。
- 热插拔:PCIe设备支持热插拔,方便用户在不关机的情况下更换或升级硬件设备。
- 兼容性:PCIe驱动程序遵循统一的规范,可在不同操作系统和硬件平台上运行。
- 稳定可靠:PCIe总线采用差分信号传输,具有抗干扰能力强、传输稳定等特点。
【4】总结PCIe驱动程序是嵌入式系统中不可或缺的一部分,它为用户提供了高性能、稳定可靠的硬件设备访问手段。
通过Uboot中PCIe驱动的实现,我们可以更好地管理和控制各类PCIe设备,满足不同应用场景的需求。
linux下pcie驱动编写流程英文回答:PCIe Driver Development Process on Linux.Step 1: Create a skeleton driver.Use the `pci_driver.c` template to create a skeleton driver. This template provides the basic framework for a PCIe driver, including the necessary function hooks.Step 2: Define the PCI device ID.In the header file of the driver, define the PCI device ID that the driver will support. This ID identifies the specific type of PCIe device that the driver can handle.Step 3: Initialize the driver.Implement the `probe()` function, which is called whena new PCIe device is found that matches the driver's device ID. In this function, initialize the driver and allocate any necessary resources.Step 4: Register the driver.Register the driver with the kernel using the`pci_register_driver()` function. This function tells the kernel that the driver is available to handle PCIe devices with the specified device ID.Step 5: Release resources.Implement the `remove()` function, which is called when a PCIe device is removed. In this function, release any resources that were allocated by the driver.Step 6: Test the driver.Use the `lspci` command to verify that the driver is recognized by the kernel. Install the driver on a system with the PCIe device connected and test the functionalityof the driver.中文回答:Linux下PCIe驱动编写流程。
PCI总线协议的FPGA实现及驱动设计
PCI总线协议是一种用于计算机内部设备之间进行数据传输的高速总线协议。
FPGA (Field-Programmable Gate Array)是一种可编程逻辑器件,可以通过编程来实现不
同的电路功能。
通过将PCI总线协议的功能实现在FPGA中,可以方便地进行硬件开
发和测试。
在FPGA中实现PCI总线协议,一般需要完成以下几个主要步骤:
1. 确定设计需求:根据具体应用需求,确定需要实现哪些PCI总线功能和特性。
2. 设计PCI控制器:在FPGA中设计实现一个PCI控制器,该控制器负责处理来自主
机的PCI总线请求,包括地址映射、数据传输等。
可以使用硬件描述语言(如VHDL
或Verilog)来描述和设计该控制器。
3. 实现PCI控制器:基于设计的描述,使用FPGA开发工具将其编译成硬件配置文件,然后将该配置文件下载到FPGA芯片中进行实际逻辑实现。
4. 驱动程序设计:设计和实现一个合适的驱动程序,该驱动程序在主机上运行,用于
控制PCI设备和FPGA之间的数据传输。
这个驱动程序可以使用C或其他编程语言来
编写,并且需要遵循PCI总线协议规范。
需要注意的是,PCI总线协议涉及到许多复杂的细节和规范,因此在实现过程中可能需要参考相关的PCI规范和文档。
另外,为了确保PCI设备与主机兼容,并保证正确的
数据传输和控制,驱动程序和FPGA实现需要进行充分的测试和验证。
以上是一个简要的描述,具体的实现细节和步骤可能因应用需求和具体平台而有所不同。
PCI总线驱动的机制1.总线子系统初始化系统初始化时会挪用■void __init driver_init(void){。
buses_init();。
}■★I nclude/linux/#define decl_subsys(_name,_type,_uevent_ops) \ struct subsystem _name##_subsys = { \.kset = { \.kobj = { .name = __stringify(_name) }, \.ktype = _type, \.uevent_ops =_uevent_ops, \} \}★Drivers/base/static struct kobj_type ktype_bus = {.sysfs_ops = &bus_sysfs_ops,};★static decl_subsys(bus, &ktype_bus, NULL);bus_subsys={.ket = {.kobj = { .name = “bus”,.ktype = &ktype_bus,.uevent_ops = NULL,}}★int __init buses_init(void){return subsystem_register(&bus_subsys);}在buses_init中挪用subsystem_register时,bus_subsys作为sysfs root目录下的项被成立(因为其的值为NULL)■pci总线初始化★struct bus_type pci_bus_type = {.name = "pci",.match = pci_bus_match,.uevent = pci_uevent,.probe = pci_device_probe,.remove = pci_device_remove,.suspend = pci_device_suspend,.suspend_late = pci_device_suspend_late,.resume_early = pci_device_resume_early, .resume = pci_device_resume,.shutdown = pci_device_shutdown,.dev_attrs = pci_dev_attrs,};★struct device_attribute pci_dev_attrs[] = { __ATTR_RO(resource),__ATTR_RO(vendor),__ATTR_RO(device),__ATTR_RO(subsystem_vendor),__ATTR_RO(subsystem_device),__ATTR_RO(class),__ATTR_RO(irq),__ATTR_RO(local_cpus),__ATTR_RO(modalias),#ifdef CONFIG_NUMA__ATTR_RO(numa_node),#endif__ATTR(enable, 0600, is_enabled_show, is_enabled_store),__ATTR(broken_parity_status,(S_IRUGO|S_IWUSR),broken_parity_status_show,broken_parity_status_store),__ATTR(msi_bus, 0644, msi_bus_show, msi_bus_store),__ATTR_NULL,};★static int __init pci_driver_init(void){return bus_register(&pci_bus_type);}postcore_initcall(pci_driver_init);通过postcore_initcall声明,使pci_driver_init函数被链接到.段。
PCI驱动程序开发实例引言PCI 总线广泛使用在计算机中,一方面是因为该总线的数据吞吐量大,另一方面是因为该总线与具体的处理器无关。
PCI 硬件设备资源的分配不是硬件设计所决定的,而是由Windows 操作系统根据PC 机中所有硬件设备对资源的占有统一分配的。
这就要求设计设备驱动程序以跨越操作系统的边界,对物理硬件进行操作。
1 DSP 芯片中集成的PCI 接口特点1.1 PCI 接口的内部结构DM642 片内集成一个主/从模式的PCI 接口,它相当于专用的PCI 接口芯片,这样可以不必深究PCI 总线规范,将工作重点放在系统功能的实现上。
DSP 可以通过这个接口实现与PCI 主机的互连。
从图1 可以看出,PCI 接口的内部结构包括7 个部分:(1)PCI 总线接口模块(PCI Bus Interface Unit,PBIN):该模块对主/从模式下的总线交易都不会插入等待周期,可以实现最大的总线传输带宽。
(2)E2PROM 控制器模块:控制器与外部的4 线串行E2PROM 相连。
PCI 接口复位时,控制器读取E2PROM 中的数据,配置PCI 接口。
DSP 可以通过映射寄存器访问E2PROM。
(3)DSP 从模式写模块:包括一个多路复用器和一个PBIN 到DSP 的FIFO。
它完成的功能是:外部PCI 设备通过PCI 接口写数据到DSP 从设备。
外部主设备往DSP 的Base0 空间执行写操作时,PCI 地址与DSPP 寄存器中的固定偏移值结合,形成DSP 目的地址,在传输过程中目的地址自动递增。
(4)DSP 从模式读模块:包括一个多路复用器和一个DSP 到PBIN 的FIFO。
它完成的功能是:外部PCI 设备通过PCI 接口能够从DSP 从设备读取。
Linux将所有外部设备看成是一类特殊文件,称之为“设备文件”,如果说系统调用是Linux 内核和应用程序之间的接口,那么设备驱动程序则可以看成是Linux内核与外部设备之间的接口。
设备驱动程序向应用程序屏蔽了硬件在实现上的细节,使得应用程序可以像操作普通文件一样来操作外部设备。
1. 字符设备和块设备Linux抽象了对硬件的处理,所有的硬件设备都可以像普通文件一样来看待:它们可以使用和操作文件相同的、标准的系统调用接口来完成打开、关闭、读写和I/O控制操作,而驱动程序的主要任务也就是要实现这些系统调用函数。
Linux系统中的所有硬件设备都使用一个特殊的设备文件来表示,例如,系统中的第一个IDE硬盘使用/dev/hda表示。
每个设备文件对应有两个设备号:一个是主设备号,标识该设备的种类,也标识了该设备所使用的驱动程序;另一个是次设备号,标识使用同一设备驱动程序的不同硬件设备。
设备文件的主设备号必须与设备驱动程序在登录该设备时申请的主设备号一致,否则用户进程将无法访问到设备驱动程序。
在Linux操作系统下有两类主要的设备文件:一类是字符设备,另一类则是块设备。
字符设备是以字节为单位逐个进行I/O操作的设备,在对字符设备发出读写请求时,实际的硬件I/O紧接着就发生了,一般来说字符设备中的缓存是可有可无的,而且也不支持随机访问。
块设备则是利用一块系统内存作为缓冲区,当用户进程对设备进行读写请求时,驱动程序先查看缓冲区中的内容,如果缓冲区中的数据能满足用户的要求就返回相应的数据,否则就调用相应的请求函数来进行实际的I/O操作。
块设备主要是针对磁盘等慢速设备设计的,其目的是避免耗费过多的CPU时间来等待操作的完成。
一般说来,PCI卡通常都属于字符设备。
2. 设备驱动程序接口Linux中的I/O子系统向内核中的其他部分提供了一个统一的标准设备接口,这是通过include/linux/fs.h中的数据结构file_operations来完成的:struct file_operations {struct module *owner;loff_t (*llseek) (struct file *, loff_t, int);ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);ssize_t (*aio_read) (struct kiocb *, const struct iovec *, unsigned long, loff_t);ssize_t (*aio_write) (struct kiocb *, const struct iovec *, unsigned long, loff_t);int (*readdir) (struct file *, void *, filldir_t);unsigned int (*poll) (struct file *, struct poll_table_struct *);long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);long (*compat_ioctl) (struct file *, unsigned int, unsigned long);int (*mmap) (struct file *, struct vm_area_struct *);int (*open) (struct inode *, struct file *);int (*flush) (struct file *, fl_owner_t id);int (*release) (struct inode *, struct file *);int (*fsync) (struct file *, loff_t, loff_t, int datasync);int (*aio_fsync) (struct kiocb *, int datasync);int (*fasync) (int, struct file *, int);int (*lock) (struct file *, int, struct file_lock *);ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);int (*check_flags)(int);int (*flock) (struct file *, int, struct file_lock *);ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);int (*setlease)(struct file *, long, struct file_lock **);long (*fallocate)(struct file *file, int mode, loff_t offset,loff_t len);};当应用程序对设备文件进行诸如open、close、read、write等操作时,Linux内核将通过file_operations结构访问驱动程序提供的函数。
例如,当应用程序对设备文件执行读操作时,内核将调用file_operations结构中的read函数。
3. 设备驱动程序模块Linux下的设备驱动程序可以按照两种方式进行编译,一种是直接静态编译成内核的一部分,另一种则是编译成可以动态加载的模块。
如果编译进内核的话,会增加内核的大小,还要改动内核的源文件,而且不能动态地卸载,不利于调试,所有推荐使用模块方式。
从本质上来讲,模块也是内核的一部分,它不同于普通的应用程序,不能调用位于用户态下的C或者C++库函数,而只能调用Linux内核提供的函数,在/proc/ksyms中可以查看到内核提供的所有函数。
在以模块方式编写驱动程序时,要实现两个必不可少的函数init_module( )和cleanup_module( ),而且至少要包含和两个头文件。
一般使用LDD3 例程中使用的makefile 作为基本的版本,稍作改变之后用来编译驱动,编译生成的模块(一般为.ko文件)可以使用命令insmod载入Linux内核,从而成为内核的一个组成部分,此时内核会调用模块中的函数init_module( )。
当不需要该模块时,可以使用rmmod命令进行卸载,此进内核会调用模块中的函数cleanup_module( )。
任何时候都可以使用命令来lsmod查看目前已经加载的模块以及正在使用该模块的用户数。
4. 设备驱动程序结构了解设备驱动程序的基本结构(或者称为框架),对开发人员而言是非常重要的,Linux的设备驱动程序大致可以分为如下几个部分:驱动程序的注册与注销、设备的打开与释放、设备的读写操作、设备的控制操作、设备的中断和轮询处理。
驱动程序的注册与注销向系统增加一个驱动程序意味着要赋予它一个主设备号,这可以通过在驱动程序的初始化过程中调用register_chrdev( )或者register_blkdev( )来完成。
而在关闭字符设备或者块设备时,则需要通过调用unregister_chrdev( )或unregister_blkdev( )从内核中注销设备,同时释放占用的主设备号。
但是现在程序员都倾向于动态创建设备号和设备结点,动态创建设备号和设备结点需要几个指定的函数,具体可以参见“Linux字符驱动中动态分配设备号与动态生成设备节点”。
设备的打开与释放打开设备是通过调用file_operations结构中的函数open( )来完成的,它是驱动程序用来为今后的操作完成初始化准备工作的。
在大部分驱动程序中,open( )通常需要完成下列工作:1.检查设备相关错误,如设备尚未准备好等。
2.如果是第一次打开,则初始化硬件设备。
3.识别次设备号,如果有必要则更新读写操作的当前位置指针f_ops。
4.分配和填写要放在file->private_data里的数据结构。
5.使用计数增1。
释放设备是通过调用file_operations结构中的函数release( )来完成的,这个设备方法有时也被称为close( ),它的作用正好与open( )相反,通常要完成下列工作:1.使用计数减1。
2.释放在file->private_data中分配的内存。
3.如果使用计算为0,则关闭设备。
设备的读写操作字符设备的读写操作相对比较简单,直接使用函数read( )和write( )就可以了。
但如果是块设备的话,则需要调用函数block_read( )和block_write( )来进行数据读写,这两个函数将向设备请求表中增加读写请求,以便Linux内核可以对请求顺序进行优化。
由于是对内存缓冲区而不是直接对设备进行操作的,因此能很大程度上加快读写速度。
如果内存缓冲区中没有所要读入的数据,或者需要执行写操作将数据写入设备,那么就要执行真正的数据传输,这是通过调用数据结构blk_dev_struct中的函数request_fn( )来完成的。
设备的控制操作除了读写操作外,应用程序有时还需要对设备进行控制,这可以通过设备驱动程序中的函数ioctl( )来完成,ioctl 系统调用有下面的原型: int ioctl(int fd, unsigned long cmd, ...),第一个参数是文件描述符,第二个参数是具体的命令,一般使用宏定义来确定,第三个参数一般是传递给驱动中处理设备控制操作函数的参数。
ioctl( )的用法与具体设备密切关联,因此需要根据设备的实际情况进行具体分析。
设备的中断和轮询处理对于不支持中断的硬件设备,读写时需要轮流查询设备状态,以便决定是否继续进行数据传输。