盾构机姿态人工测量方案
由于ELS靶被送往德国进行例行的检修,大汉盾构区间右线暂时无法使用SLS-T 导向系统,为保证盾构日常掘进的需要,确保盾构机按设计轴线前进,拟采用人工测量的办法测量出盾构机当前的姿态,以指导盾构机的掘进。以下对盾构机姿态的人工测量方案进行说明:
§1原理
盾构机在出厂时,开发SLS-T导向系统的VMT公司就根据盾构机的设计与加工尺寸,在盾构机中体的隔板上布置了12~16个测点,所有的测点都在出厂前详细测设了每一个测点与刀盘中心的相对位置。盾构机姿态人工测量就是利用人工直接采用控制导线的测量办法详细测出这些测点中的部分点位的绝对坐标,然后根据测点与刀盘中心的空间关系,反算出刀盘中心坐标,最后根据设计线路参数与刀盘中心的绝对坐标的空间关系推算出盾构机的三维控制姿态。
§2适用范围
2.1盾构机始发姿态测量
盾构机始发姿态便是由人工测量出的盾构机姿态。盾构机始发定位时需精确测定ELS靶相对于盾构机主机的相对位置关系,其方法便是根据人工测量出的盾构机姿态,在SLS-T导向系统的微机中调整ELS靶的位置参数,以改变微机上显示的盾构机姿态,当盾构机上显示的姿态与人工测量出的盾构机姿态一致时,便可认为当前ELS靶的位置参数是正确的,ELS靶始发定位调试顺利完成。
2.2对S L S-T导向系统的复核
在掘进施工中,利用人工测量的办法测量出盾构机当前的姿态,与SLS-T导向系统显示的盾构机姿态进行比较,来复核导向系统的测量成果。
2.3盾构掘进施工测量
利用人工测量出的盾构机姿态可指导盾构机的掘进施工,保证盾构机按设计轴线前进。盾构掘进施工中,人工测量盾构机姿态的测量频率为每环1次。
§3实例
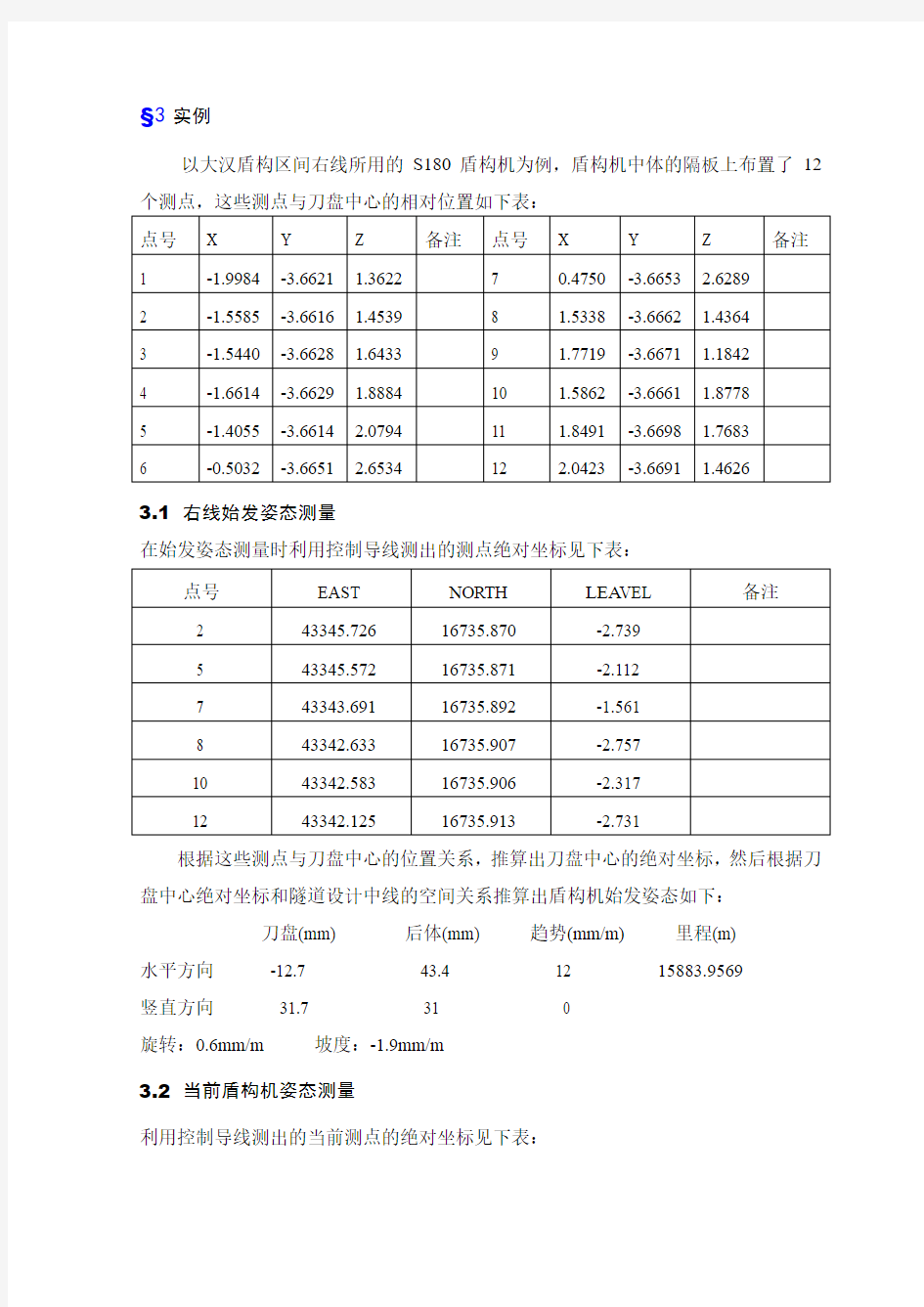
以大汉盾构区间右线所用的S180盾构机为例,盾构机中体的隔板上布置了12个测点,这些测点与刀盘中心的相对位置如下表:
3.1右线始发姿态测量
在始发姿态测量时利用控制导线测出的测点绝对坐标见下表:
根据这些测点与刀盘中心的位置关系,推算出刀盘中心的绝对坐标,然后根据刀盘中心绝对坐标和隧道设计中线的空间关系推算出盾构机始发姿态如下:
刀盘(mm) 后体(mm) 趋势(mm/m) 里程(m)
水平方向-12.7 43.4 12 15883.9569
竖直方向31.7 31 0
旋转:0.6mm/m 坡度:-1.9mm/m
3.2当前盾构机姿态测量
利用控制导线测出的当前测点的绝对坐标见下表:
根据这些测点与刀盘中心的位置关系,推算出刀盘中心的绝对坐标,然后根据刀盘中心绝对坐标和隧道设计中线的空间关系推算出盾构机当前姿态如下:
刀盘(mm) 后体(mm) 趋势(mm/m) 里程(m)
水平方向27 26 0 15705.102
竖直方向11 4 1
旋转:-4 mm/m 坡度: 5 mm/m
§4测量仪器与测量精度
所用仪器为徕咔TCA1103全站仪
采用此方法进行人工测量,测量精度可以达到如下标准:
平面偏差±5mm;
高程偏差±5mm;
纵向坡度偏差1‰;
盾构机旋转偏差1‰;
盾构机刀盘里程偏差±10mm。