天津理工大学2011本科优秀毕业设计说明书 基于视觉传感器的智能小车的标志识别系统 机械工程学院,机械工程及自动化,王松涛 指导老师:孙启湲,副教授,机械工程学院 摘要:视觉信号具有信号探测范围宽、获取信息丰富等优点。随着近几年图像处理技术以及计算机处理能力的飞速发展,视觉导航成为机器人导航的主要发展方向之一。机器人导航的任务之一就是根据路面特征来行走,本文在Visual C++集成开发环境中基于OpenCV 和DirectShow 视频采集技术编程实现了系统的功能。本文所设计的就是一个基于视觉传感器的智能小车的标志识别系统,根据图像分析后的二值图像序列信息,使小车能根据识别到的图像信息进行运动。 关键词:智能小车视觉导航图像处理特征识别 The Mark Recognition System Based on Vision for an Intelligence Vehicle Abstract: Visual signal with the signal detection range, access to information-rich and so on. As in recent years, image processing technology and the rapid development of computer processing power, visual robot navigation as the main development direction of navigation. Robot navigation tasks is to walk to the road characteristics, this article in Visual C + + integrated development environment based on OpenCV and DirectShow video capture technology, programming function of the system. This article is designed is a smart vision sensor based car sign recognition system, according to the image analysis of binary image sequences, so the car can be identified according to the image information campaign. ehicle Mark Recognition Image Processing Feature Recognition Key Words:Intelligence V 1 绪论 机器人[1]的导航技术是智能型机器人自主完成任务的核心技术。移动机器人导航是指移动机器人按照预先给出的任务命令,根据已知信息做出路径规划,并在行进过程中,不断感知周围的局部环境信息,自主地做出决策,调整自身位姿,引导自身安全行驶或跟踪已经路径到达目标位置。这其中包括三个主要内容:避障、定位和路径规划。本文所设计的就是一个基于视觉传感器的智能小车的标志识别系统,根据图像分析后的二值图像序列信息,小车能根据识别到的图像信息进行运动。 [2] 2 基于视觉传感器的智能小车系统
视觉传感器项目 计划书
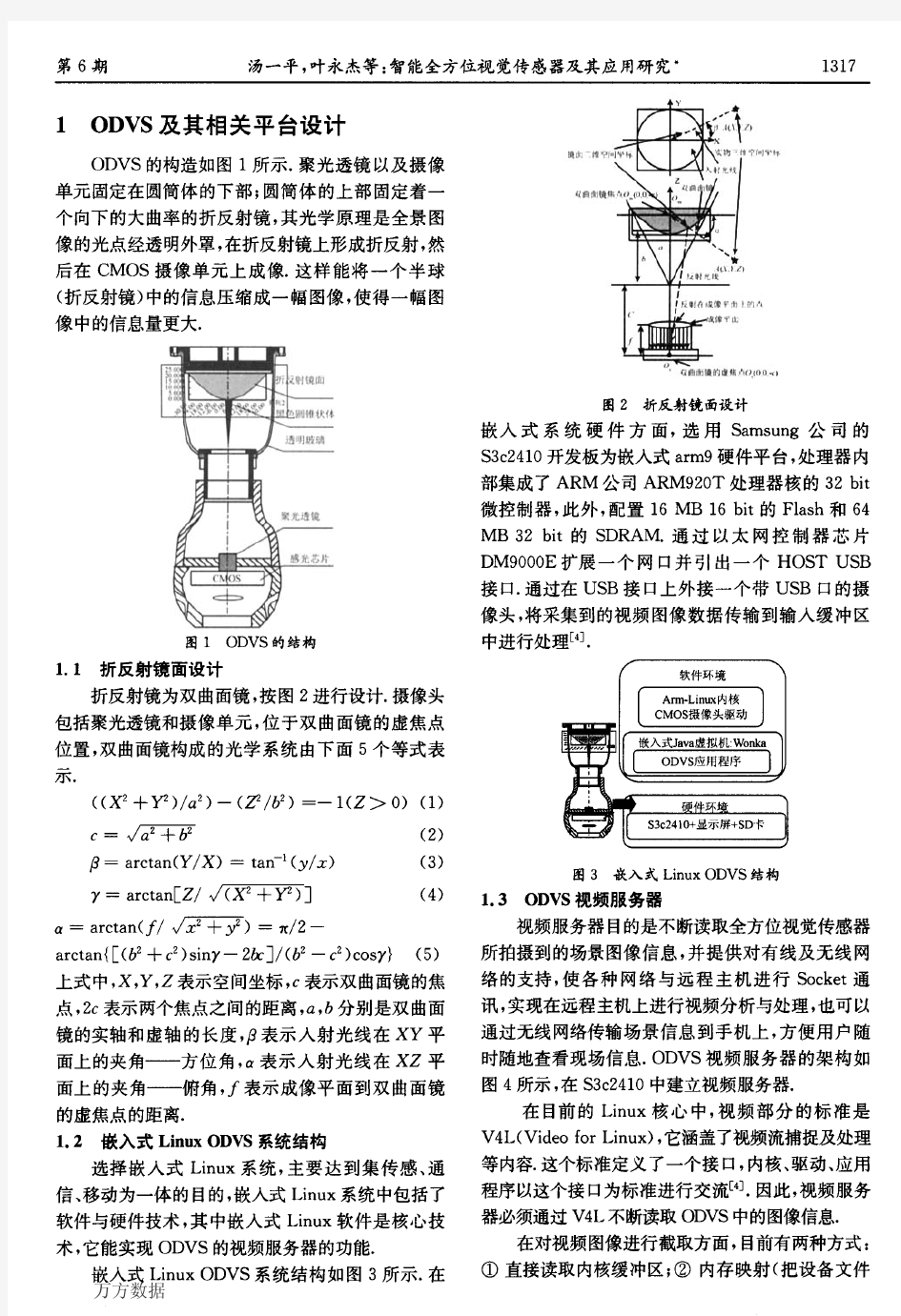
摘要 智能制造装备将通过物联网、云计算等信息技术与制造技术的深 度融合,构建虚拟网络——实体物理系统,实现软硬件制造资源和能 力的全系统、全生命周期、全方位的感知、互联、决策、控制、执行 和服务,对制造企业的发展具有重要作用。首先,企业在此基础之上 对产品、设备、工艺、工业链、运营、财务、销售、消费者等相关数 据进行收集与分析,进而辅助企业管理决策,以用户为导向、以需求 为核心进行组织形式和经营策略变革。其次,把生产线、工厂、设备、工艺、供应商、产品和客户紧密地联系在一起,企业趋向于在短时间 内以开放、合作、共享的创新模式,整合内外部资源,促进用户深度 参与、产业链上下游企业高度协同,缩短产品研发周期,增强企业对 市场的快速反应能力。最后,推动新的商业模式,工厂里空闲的生产 线通过工业互联网交易,为其他需要的客户提供生产。 该视觉传感器项目计划总投资16681.43万元,其中:固定资产投 资13677.60万元,占项目总投资的81.99%;流动资金3003.83万元,占项目总投资的18.01%。
达产年营业收入26187.00万元,总成本费用20861.60万元,税金及附加290.19万元,利润总额5325.40万元,利税总额6350.13万元,税后净利润3994.05万元,达产年纳税总额2356.08万元;达产年投资利润率31.92%,投资利税率38.07%,投资回报率23.94%,全部投资回收期5.68年,提供就业职位409个。 重视环境保护的原则。使投资项目建设达到环境保护的要求,同时,严格执行国家有关企业安全卫生的各项法律、法规,并做到环境保护“三废”治理措施以及工程建设“三同时”的要求,使企业达到安全、整洁、文明生产的目的。
浅谈视觉传感技术 王恋 (重庆理工大学,贵州省安顺市561009) 摘要:随着科学技术的发展,传感器的研究和应用变得越来越重要,它成为获取信息的重要技术手段,针对不同的应用传感器技术也分为:光电传感技术、光纤传感技术、视觉传感技术、生表面波传感技术、生物传感技术、化学传感技术、前沿传感技术这七大类传感技术,本文将着重介绍视觉传感技术。视觉传感技术因其硬件成本的显著降低,性能的极大提升以及具备了大规模推广的条件得到了绝大多数研究者和工业生产者的青睐,这为视觉传感技术的发展前景奠定了基础,但同时也存在测量精度问题,视觉传感器对环境的高要求也是视觉传感器需要解决的问题,只有提高了测量精度问题和适应环境变化的问题才能使得视觉传感器更具有竞争力和自身优势。 关键词:信息;传感技术;视觉传感技术;测量精度;适应环境 On visual sensing technology Wang Lian (Chongqing University of technology,Anshun City,Guizhou Province,561009,China) Abstract:With the development of science and technology,research and application of the sensor becomes more and more important,it has become an important technical means to obtain information,according to the application of different sensor technologies are also divided into:photoelectric sensor technology,optical fiber sensing technology,visual sensing technology, surface wave sensor technology,biological sensor technology,chemical sensing technology,the sensor technology frontier seven kinds of sensing technology,this paper will focus on the visual sensing technology.Because the visual sensing technology significantly reduce the hardware cost,greatly enhance the performance and have a large-scale promotion of the conditions have been most researchers and industrial producers favor,which laid the foundation for future vision sensing technology,but there are also problems of measurement accuracy,the problem of the high requirement of visual sensor is also a visual environment the sensor needs to be solved,only to improve the measurement accuracy and to adapt the change of environment problems in order to make the visual sensor has more advantages and competitiveness Key words:Information;sensing technology;vision sensing technology;measurement accuracy;adaptation to the environment 0引言 视觉源于生物界获取外部环境信息的一种方式,是自然界生物获取信息的最有效手段,是生物智能的核心组成之一。人类80%的信息都是依靠视觉获取的,基于这一启发研究人员开始为机械安装“眼睛”使得机器跟人类一样通过“看”获取外界信息,由此诞生了一门新兴学科——计算机视觉,人们通过对生物视觉系统的研究从而模仿制作机器视觉系统,尽管与人类视觉系统相差很大,但是这对传感器技术而言是突破性的进步。视觉传感器技术的实质就是图像处理技术,通过截取物体表面的信号绘制成图像从而呈现在研究人员的面前。视觉传感技术的出现解决了其他传感器因场地大小限制或检测设备庞大而无法操作的问题,由此广受工业制造界的欢迎。本文通过对比视觉传感技术的优缺点以及发展趋势来展示视觉传感技术的兴起和应用。 1视觉传感技术概述 视觉传感技术是传感技术七大类中的一个,视觉传感器是指[1]:通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。视觉传感器具有从一整幅图像捕获光线的数以千计的像素。图像的清晰和细腻程度通常用分辨率来衡量,以像素数量表示。在捕获图像之后,视觉传感器将其与内存中存储的基准图像进行比较,以做出分析。它是基于生物视觉和计算机视觉所提出的。视觉传感器是50年代后期出现的,发展十分迅速,是机器人中最重要的传感器之一。机器人视
——新一代视觉传感器可靠的自动化技术用视觉传感器
视觉传感器 应用于自动化技术 Fig. showing original size 就位与完整性检查 目标定位与位置检测 读取数字和字符读取条形码和矩阵码 应用 友好的用户界面 n 所有 视觉传感器均采用全新的直观用户界面n 结构简单,4步完成参数设置 功能强大 n 使用 实现全新的强大的360°目标定位功能n 灵活的12针连接器,带5个数字输入和5个数字输出 安全可靠 n 防护等级为IP 67,坚固金属外壳 n 通过用户等级 / 密码保护,确保安全操作
CS-系列 —— 便捷的检查和分选应用解决方案 新型视觉传感器 系列 —— 功能强大,用于完成复杂的检测任务 ID-100 读取一维和二维码 ID-110 读取文本、一维和二维码 CS-100 就位与完整性检查 XF-100 目标定位与位置检测 XF-200 质量检查与识别 Identi?kation ID 系列 —— 可靠完成识别任务的读码器
为您带来的好处 n 即使在不同的照明条件下也能可靠 运行 n 高处理允差,可轻松检测不同材质表面和不同颜色 n 许多任务即便在没有特殊照明的情况下也能轻松完成 强大的360°目标定位功能全新的 技术,确保可靠的目标识别 轮廓处理 —— 采用 图像处理器 即使在苛刻条件下也能够稳定可靠地进行目标识别 即使在结构背景、光照变化以及零件被部分覆盖等苛刻条件下,也能够实现较高的识别率。 为您带来的好处 n 零件无需机械引导 n 快速实施检查任务 n 目标定位功能允许同时检测多个产 品特征 14:0020:00 ?????㏎ ????? ???㏎? 8:00
二哈识图AI视觉传感器,一款简便易用适用于AI教育教学和STEAM教 育、创客的智能摄像头 二哈识图AI视觉传感器是什么? 二哈识图AI视觉传感器,英文名HUSKYLENS,是国内著名开源硬件和创客教育企业DFRobot旗下新研发的一款简单易用价格实惠的智能传感器。其采用AI芯片内置机器学习技术,可识别多种目标物体如人脸识别、物体识别和追踪、颜色识别、巡线和二维码标签识别等,检测结果通过UART或I2C端口直接输出,与主流控制器无缝对接;体积小、性能强、算法本地处理,可快速搭建原型,被广泛应用于AI教育、STEAM教育和创客领域。
二哈识图(HUSKYLENS)AI视觉传感器的独特优势: 1. 简单易用:简单易用:二哈识图AI视觉传感器拥有智能设计,采用AI芯片,内置多种算法,您只需一键操作,便可让二哈识图智能识别更多新事物。 2. 智能学习:二哈识图AI视觉传感器内置强大机器学习技术,使其具有人脸识别、颜色识别、标签识别和物体识别和追踪等能力,比普通传感器更智能更强大。 3. 小巧快捷:二哈识图AI视觉传感器自带2.0寸IPS显示屏,体积小巧,调参无需电脑辅助,本地处理所有算法直接输出结果,快捷,识别率更高。 4. 性能高效:二哈识图AI视觉传感器采用新一代AI专用芯片Kendryte K210,其神经网络算法运行时速度要比STM32H743快了1000倍,性能更高效。 5.功能强大: 二哈识图板载UART/I2C接口,可以连接到Arduino、Raspberry Pi、LattePanda、micro:bit、STM32等主流控制器,实现硬件无缝对接,直接输出识别结果给控制器,无需折腾复杂的算法,就能制作非常有创意的项目。
视觉传感器在包装机械上的应用 作者:余舒彤指导老师:江庆 (安徽农业大学工学院 2007级机械设计制造及其自动化专业合肥 230036) 摘要:工业自动化生产技术的飞速发展,对现代生产的检测技术提出了新的要求,现在生产同时提出实时,在线,非接触检测以控制生产过程,提高生产效率及产品的合格率,这是许多传统的检测方法无法提供的。现代工业生产的制造精度也大大提高,需要相应的高精度的检测方法,传统的检测手段早已经无法满足现在化生产检测的要求,需要新型产品检测技术来适应现代生产的要求,视觉传感器的检测技术是近年来发展的一门新兴检测技术,采用自动化与智能化,通过计算机识别和控制,测量过程只需要很少的人工干预就可以完成,视觉传感器的检测技术具有非接触,测量速度快,自动化程度高,精度高等优点,很适合现在花先进制造业高度自动化的要求。而我们知道绝大多数的产品,包装都是必不可少的最后一道工序,对产品的质量起着至关重要的影响。包装不仅直接对产品的安全起了保护作用,而却在一定程度上对企业进行了宣传,更代表着公司的形象。所以包装是非常重要的一道工序。 关键词:视觉传感器包装检测 1 绪论 现代工业生产技术的不断发展,加快了现代化工业大生产的节拍,为了使视觉检测系统满足于现代大生产的告诉生产节拍,视觉检测系统在检测速度方面还有待进一步的提高,传统的视觉检测系统中,由图像传感器将图像数据传送到计算机,由计算机中的图像采集卡对图像进行采集,并利用高级语言编写的程序对图像进行处理,这种方法除了成本高,开发周期长以外,还不利于集成化设计,而随着微电子技术和集成电路制造技术的发展,这种视觉检测系统也发生了一定的变化,由主要依托计算机视觉检测系统转变为将图像的采集,处理与通信功能集成与单一相机内的视觉传感器,其具有多功能,模块化,搞可靠性,易于实现的特点。同时,由于应用了最新的DSP,FPGA以及大容量存储技术,其智能化程度不断提高,使其可以完成大多数的视觉检测任务。 2 视觉传感器的工作原理 视觉传感器具有从一整幅图像捕获光线的数以千计的像素能力,它的主要部件就是照相机或者摄像机,通过镜头图像传感器(一般是CCD和CMOS类型)采
一种多视觉传感器控制系统的实现 1 引言 结构光传感器是应用较早、发展较成熟的视觉传感器,因此本系统采用结构光传感器来采集2 视觉系统的概述 视觉检测系统中采集被测物体 视觉传感器中MCU 控制电路提供CCD 摄像机、激光投射器的电源并且控制着它们的开启与关闭,为避免激光投射器使用时间过长激光器发热引起线结构光光能分布不稳从而影响测量精度,当传感器开始测量时,先上电初始化,再打开激光器,测量完毕后即关闭以延长投射器寿命。 本系统中,上位机为PC 机,下位机为8051 单片机控制单元,上、下位机之间用CAN 总线进行通讯,由于PC 机中并不带CAN 总线接口,因此必需一个CAN 接口卡,这里选用广州周立功公司的USBCAN 智能接口卡来通信,因其具有体积小、外置且即插即用等特点。这样,PC 可通过USB 总线方便地连接至CAN 总线网络控制各个CAN 节点进行数据采集和处理。USBCAN 智 能CAN 接口卡可以与ZLGCANTest 通用CAN-bus 测试软件连接运行,执行CAN-bus 总线数据的接收、发送测试任务,较易于实现CAN-bus 产品开发和数据分析。USBCAN 智能CAN 接口卡采用周立功公司提供的通用的ZLGVCI 驱动库,支持WIN98、2000 和XP 操作系统并支持Linux 平台。用户通过接口卡提供的ZLGVCI 动态开发库可以方便快捷的开发出CAN 系统应用产品。为了 把模拟CCD 相机输出的被测物体的模拟视频3 CAN 总线简介 CAN 总线是德国BOSCH 公司从80 年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主
视觉传感器几大技术要点:技术分类、技术实现和应用、选择技巧视觉传感技术是传感技术七大类中的一个,视觉传感器是指:通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。 什么是视觉传感器? 视觉传感器是整个机器视觉系统信息的直接来源,主要由一个或者两个图形传感器组成,有时还要配以光投射器及其他辅助设备。视觉传感器的主要功能是获取足够的机器视觉系统要处理的最原始图像。 图像传感器可以使用激光扫描器、线阵和面阵CCD摄像机或者TV摄像机,也可以是最新出现的数字摄像机等。 视觉传感技术分类1、3D视觉传感技术3D视觉传感器具有广泛的用途,比如多媒体手机、网络摄像、数码相机、机器人视觉导航、汽车安全系统、生物医学像素分析、人机界面、虚拟现实、监控、工业检测、无线远距离传感、显微镜技术、天文观察、海洋自主导航、科学仪器等等。这些不同的应用均是基于3D视觉图像传感器技术。特别是3D影像技术在工业控制、汽车自主导航中具有急迫的应用。 2、智能视觉传感技术智能视觉传感技术下的智能视觉传感器也称智能相机,是近年来机器视觉领域发展最快的一项新技术。智能相机是一个兼具图像采集、图像处理和信息传递功能的小型机器视觉系统,是一种嵌入式计算机视觉系统。它将图像传感器、数字处理器、通讯模块和其他外设集成到一个单一的相机内,由于这种一体化的设计,可降低系统的复杂度,并提高可靠性。同时系统尺寸大大缩小,拓宽了视觉技术的应用领域。 智能视觉传感器的易学、易用、易维护、安装方便,可在短期内构建起可靠而有效的视觉检测系统等优点使得这项技术得到飞速的发展。
视觉传感技术的应用及工作原理 视觉传感技术是传感技术七大类中的一个,视觉传感器是指通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。视觉传感器是整个机器视觉系统信息的直接来源,主要由一个或者两个图形传感器组成,有时还要配以光投射器及其他辅助设备。视觉传感器的主要功能是获取足够的机器视觉系统要处理的最原始图像。 视觉传感的工作原理 视觉源于生物界获取外部环境信息的一种方式,是自然界生物获取信息的最有效手段,是生物智能的核心组成之一。人类80%的信息都是依靠视觉获取的,基于这一启发研究人员开始为机械安装“眼睛”使得机器跟人类一样通过“看”获取外界信息,由此诞生了一门新兴学科——计算机视觉,人们通过对生物视觉系统的研究从而模仿制作机器视觉系统,尽管与人类视觉系统相差很大,但是这对传感器技术而言是突破性的进步。视觉传感器技术的实质就是图像处理技术,通过截取物体表面的信号绘制成图像从而呈现在研究人员的面前。 视觉传感器具有从一整幅图像捕获光线的数以千计的像素。图像的清晰和细腻程度通常用分辨率来衡量,以像素数量表示。在捕获图像之后,视觉传感器将其与内存中存储的基准图像进行比较,以做出分析。例如,若视觉传感器被设定为辨别正确地插有八颗螺栓的机器部件,则传感器知道应该拒收只有七颗螺栓的部件,或者螺栓未对准的部件。此外,无论该机器部件位于视场中的哪个位置,无论该部件是否在360 度范围内旋转,视觉传感器都能做出判断视觉传感技术的出现解决了其他传感器因场地大小限制或检测设备庞大而无法操作的问题,由此广受工业制造界的欢迎。 视觉传感技术包括3D视觉传感技术,3D视觉传感器具有广泛的用途,比如多媒体手机、网络摄像、数码相机、机器人视觉导航、汽车安全系统、生物医学像素分析、人机界面、虚拟现实、监控、工业检测、无线远距离传感、显微镜技术、天文观察、海洋自主导航、
浅谈机器视觉传感器 机器视觉传感器是整个机器视觉系统信息的直接来源,它的选择取决于准确性、输出、灵敏度、机器视觉系统的成本以及对应用要求的充分理解。对传感器主要性能的基本理解能够帮助开发人员迅速缩小他们的查找范围,找到合适的传感器。 大多数的机器视觉系统的用户认识到相机是系统的关键要素,经常把它当作视觉系统的“芯片”。相机本身是一个复杂的系统:包括镜头、信号处理器、通讯接口,以及最核心的部分——把光子转换成电子的器件:图像传感器。镜头和其它的部件共同配合来支持相机的功能,传感器最终决定相机的最高性能。 业内的许多讨论都集中在加工技术上,以及CMOS和CCD传感器孰优孰劣。这两种技术都有其优势和不足之处,所加工的传感器有着不同的性能。最终用户关心的不是传感器是“如何”被制造出来的,而是其在最终应用中的表现。 在指定的应用中,三个关键的要素决定了传感器的选择:动态范围、速度和响应度。动态范围决定系统能够抓取的图像的质量,也被称作对细节的体现能力。传感器的速度指的是每秒种传感器能够产生多少张图像和系统能够接收到的图像的输出量。响应度指的是传感器将光子转换为电子的效率,它决定系统需要抓取有用的图像的亮度水平。传感器的技术和设计共同决定上述特征,因此系统开发人员在选择传感器时必须有自己的衡量标准,详细的研究这些特征将有助于做出正确的判断。 正确理解动态范围 传感器的动态范围是最容易使人疑惑和误解的地方,这是因为机器视觉系统是数字的。图像的动态范围包括两部分:一是传感器能够工作的曝光范围(亮度的倍数);其次是传感器能够数字化像素信号的电平的数量,用位数表示。这两部分通常是紧密相关的。 曝光的动态范围表示传感器能够正常工作的亮度水平。当光子撞击图像传感器的活动像素区域时产生电子,传感器将其捕获并存储起来以备系统读取。撞击活动区域的光子数越多,产生的电子数就越多,在读取的间隔中,该过程持续的时间越长,被存储的电子就越多。决定传感器曝光动态范围的参数之一就是填充存储阱的曝光。制造传感器的半导体加工工艺和电路设计共同决定阱的容量或深度。 电子噪音是传感器能够工作的最低曝光水平,尽管没有任何光子撞击活动的像素区域,图像传感器也将以热量发射的形式产生电子。要产生可识别的信号,必须有足够的光子撞击活动的像素区域,以便在存储阱中有比暗电流噪音所产生的电子数更多的电子。传感器的最低曝光率是产生至少与噪音电子同样多的光电子数。只有在超过噪音等量的曝光水平时,传感器才能产生有用的信息。 传感器的曝光动态范围是由其物理和电路设计所决定的功能,而数字动态范围只是由电路设计所决定的功能。图像传感器的数字动态范围只是说明它能够提供给视觉系统的明显
基于视觉传感器的智能小车的标志识别系统 摘要:视觉信号具有信号探测范围宽、获取信息丰富等优点。随着近几年图像处理技术以及计算机处理能力的飞速发展,视觉导航成为机器人导航的主要发展方向之一。机器人导航的任务之一就是根据路面特征来行走,本文在Visual C++集成开发环境中基于OpenCV 和DirectShow 视频采集技术编程实现了系统的功能。本文所设计的就是一个基于视觉传感器的智能小车的标志识别系统,根据图像分析后的二值图像序列信息,使小车能根据识别到的图像信息进行运动。 关键词:智能小车视觉导航图像处理特征识别 The Mark Recognition System Based on Vision for an Intelligence Vehicle Abstract:Visual signal with the signal detection range, access to information-rich and so on. As in recent years, image processing technology and the rapid development of computer processing power, visual robot navigation as the main development direction of navigation. Robot navigation tasks is to walk to the road characteristics, this article in Visual C + + integrated development environment based on OpenCV and DirectShow video capture technology, programming function of the system. This article is designed is a smart vision sensor based car sign recognition system, according to the image analysis of binary image sequences, so the car can be identified according to the image information campaign. Key Words:Intelligence Vehicle Mark Recognition Image Processing Feature Recognition 1 绪论 机器人[1]的导航技术是智能型机器人自主完成任务的核心技术。移动机器人[2]导航是指移动机器人按照预先给出的任务命令,根据已知信息做出路径规划,并在行进过程中,不断感知周围的局部环境信息,自主地做出决策,调整自身位姿,引导自身安全行驶或跟踪已经路径到达目标位置。这其中包括三个主要内容:避障、定位和路径规划。本文所设计的就是一个基于视觉传感器的智能小车的标志识别系统,根据图像分析后的二值图像序列信息,小车能根据识别到的图像信息进行运动。 2 基于视觉传感器的智能小车系统 本论文是基于视觉传感器[8]的智能小车识别系统,试验的平台选用的是上海中为机器人提供的小车,小车实现的功能是在地面行走时,能根据摄像头反馈回的地面特征,实现自主移动。实验中用到的模块有,CMOS 摄像头,无线图传模块,传感与通讯模块,运动控制模块,远程控制模块,USB 图像采集卡,运动过程如图2.1所示:
智能的视觉传感器技术及应用 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、数控系统、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 视觉传感技术是传感技术七大类中的一个,视觉传感器是指:通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。 一、视觉传感器概述 视觉传感技术是传感技术七大类中的一个,视觉传感器是指:通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。 二、分类 1、3D视觉传感技术 3D视觉传感器具有广泛的用途,比如多媒体手机、网络摄像、数码相机、机器人视觉导航、汽车安全系统、生物医学像素分析、人机界面、虚拟现实、监控、工业
检测、无线远距离传感、显微镜技术、天文观察、海洋自主导航、科学仪器等等。这些不同的应用均是基于3D视觉图像传感器技术。特别是3D影像技术在工业控制、汽车自主导航中具有急迫的应用。 2、智能视觉传感技术 智能视觉传感技术下的智能视觉传感器也称智能相机,是近年来机器视觉领域发展最快的一项新技术。智能相机是一个兼具图像采集、图像处理和信息传递功能的小型机器视觉系统,是一种嵌入式计算机视觉系统。它将图像传感器、数字处理器、通讯模块和其他外设集成到一个单一的相机内,由于这种一体化的设计,可降低系统的复杂度,并提高可靠性。同时系统尺寸大大缩小,拓宽了视觉技术的应用领域。 智能视觉传感器的易学、易用、易维护、安装方便,可在短期内构建起可靠而有效的视觉检测系统等优点使得这项技术得到飞速的发展。 三、视觉传感技术的实现基础 视觉传感器的图像采集单元主要由CCD/CMOS像机、光学系统、照明系统和图像采集卡组成,将光学影像转换成数字图像,传递给图像处理单元。通常使用的图像传感器件主要有CCD图像传感器和CMOS图像传感器两种。下面将介绍两种传感器的实现原理及优缺点。 类别CCD CMOS 生产线专用通用 成本高低
视觉传感器 视觉传感器是指通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。 目录 ?视觉传感器在包装机械中的应用 ?视觉传感器的工作原理 ?全功能视觉传感器应用解答 ?视觉传感器在包装机械中的应用 o在不久之前,设计质量控制系统的工程师还不得不在若干种检验选项中做出选择,没有一种完全令人满意。 这些选项包括昂贵的单用途视觉系统,多阵列低功能光电传感器, 以及易受疲劳和精力不集中影响的人眼检验。然而,如今最先进的 视觉传感器正将传统方法的最佳性能与史无前例的速度、精确度、 尺寸及成本优势相结合。 本文将比较各类传感选项的功能,并证明为什么视觉传感成为工业 传感器市场中增长最快的领域。 视觉传感的基本原理 光电传感器包含一个光传感元件,而视觉传感器具有从一整幅图像 捕获光线的数以千计的。图像的清晰和细腻程度通常用分辨率来衡 量,以像素数量表示。Banner 工程公司提供的部分视觉传感器能 够捕获130 万像素。因此,无论距离目标数米或数厘米远,传感 器都能“看到”十分细腻的目标图像。 在捕获图像之后,视觉传感器将其与内存中存储的基准图像进行比 较,以做出分析。例如,若视觉传感器被设定为辨别正确地插有八 颗螺栓的机器部件,则传感器知道应该拒收只有七颗螺栓的部件, 或者螺栓未对准的部件。此外,无论该机器部件位于视场中的哪个 位置,无论该部件是否在360 度范围内旋转,视觉传感器都能做 出判断。
视觉传感器的优势 在可用的检验备选方案中,即视觉系统、光电传感器、人工检验,以及视觉传感器,视觉传感器通常因其精确性、易用性、丰富功能及合理成本而成为最佳选择。 随着各行业竞争越来越激烈,利润率逐渐变小,制造商无法承受因瑕疵产品造成的高废品率。因此,为在产生高昂成本之前检测出问题,制造商正将检验工作融入整个制造过程。 ◆视觉系统与视觉传感器之比较 复杂的视觉系统是一项成熟的技术,可执行细致的自动检验。但是,复杂性和高成本妨碍了其在许多行业中的应用,其价格通常从5000 美元至50000 美元以上。这些复杂的视觉系统需要一个 或多个、定制软件以及一台计算机。它们往往需要聘请外部视觉顾问来设计、集成和安装系统。 此外,鉴于此类系统的专用性,无法将它们轻松地改作它用。这些复杂的系统通常要求持续的专业支持。 尽管对复杂视觉系统的需求仍然存在,但是更廉价、更容易使用的视觉传感器的推出,为一些工业应用提供了性价比更佳的解决方案。此外,由于视觉传感器更小、更易使用,制造商会更频繁地在检验和校验应用中采用视觉解决方案。视觉传感器在工厂自动化的品质提高及生产效率改进方面功不可没。 ◆光电传感器与视觉传感器之比较 与光电传感器相比,视觉传感器赋予机器设计者更大的灵活性。以往需要多个光电传感器的应用,现在可以用一个视觉传感器来检验多项特征。视觉传感器能够检验大得多的面积,并实现了更佳的目标位置和方向灵活性。这使视觉传感器在某些原先只有依靠光电传感器才能解决的应用中受到广泛欢迎。在传统上,这些应用还需要昂贵的配件,以及能够确保目标物体始终以同一位置和姿态出现的精确运动控制。 此外,由于一个基本视觉传感器的成本仅相当于数个具有较贵配件的光电传感器,因此价格已不再是问题。 视觉传感器为应用的切换提供了无与伦比的灵活性。例如,生产工序的切换(从单份装酸奶切换成冰淇淋桶)可能仅需数秒钟,并且可遥控完成。附加的检验条件可轻松地添加到此应用中。 ◆人工检验和视觉传感器之比较
机器人视觉传感器应用 庞浜 学号19920141152889 (厦门大学物理与机电工程学院,福建厦门 361005) 摘要:传感器是自动控制特别是机器人技术中一个很重要的部分。它类似人的五感(眼、耳、鼻、舌、身)对对象物,周围环境,系统内部状态进行快速、准确的感觉、检测、识别。本译文介绍了几种类似人视觉功能的传感器(红外线传感器,视觉—位置传感器,色识别传感器),及其原理、特点、应用及主要技术指标。在机器人发展日益成熟的今天,视觉传感器的重要作用日益显现。 关键词:视觉传感器,图像处理,机器人 Abstract:Sensor is a very important part of automatically controlled in particular robotics. It is similar to one of the five senses (eyes,ears,nose, tongue,body) to the object, the surroundings, the internal state of the system for fast, accurate feeling, detection, identification.The translation introduces several features similar to human vision sensors (infrared sensors, vision - position sensors,color recognition sensor),and its principles,characteristics,applications and main technical indicators.In today's increasingly sophisticated robot development, the important role of the visual sensor becomes increasingly obvious. 1引言 目前,在全世界的制造业中,工业机器人已经在生产中起到了越来越重要的作用。为了使机器人能够胜任更复杂的工作,机器人不但要有更好的控制系统,还需要更多地感知环境的变化。其中机器人视觉以其信息量 大、信息完整成为最重要的机器人感知功能。 机器人视觉伺服系统是机器视觉和机器人控制的有机结合,是一个非线性、强藕合的复杂系统,其内容涉及图象处理、机器人运动学和动力学、控制理论等研究领域。随着摄像设备性能价格比和计算机信息处理速度的提高,以及有关理论的日益完善,视觉伺服已具备实际应用的技术条件,相关的技术问题也成为当前研究的热点。 机器人视觉是使机器人具有视觉感知功能的系统。机器人视觉可以通过视觉传感器获取环境的一维、二维和三维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置及各种状态。机器人视觉视觉侧重于研究以应用为背景的专用视觉系统,只提供对执行某一特定任务相关的景物描述。机器人视觉硬件主要包括图像获取和视觉处理两部分,而图像获取由照明系统、视觉传感器、模拟-数字转换器和帧存储器等组成。根据功能不同,机器人视觉可分为视觉检验和视觉引导两种,广泛应用于电子、汽车、机械等工业部门和医学、军事领域。计算机视觉应用多采用光电传感器、视觉传感器或者视觉系统来实现。光电传感器结构简单,价格
人工智能(一)逆天的传感器 「原创」作者:于文飞【互联网创业圈】向那些疯狂的家伙们致敬,他们特立独行,他们桀骜不驯;他们惹事生非,他们格格不入,他们用与众不同的眼光看待事物;他们不喜欢墨守成规,他们也不愿安于现状,你可以赞美他们,引用他们,反对他们,质疑他们,颂扬或是诋毁他们,但唯独不能漠视他们,因为他们改变了事物,他们推动人类向前发展。——乔布斯人类存在的意义到底是什么?这是亘古以来很 多人所追寻的答案,或许宗教给了我们答案,或许我们永远不可能得到最终的答案。机器与生命之间的重叠在一年年增加,这种仿生学上的融合也体现在词语上。“机械”与“生命”这两个词的含义也在不断延展,直到有一天,所有结构复杂的东西都会被看作是机器,所有能够自我维持的机器都会被看作是生命。除了语义的变化,还有两种具体的趋势正在发生:(1)人造物表现的越来越像生命体;(2)生命变得越来越工程化。当下发展迅速的“机器深度学习”和“神经网络”技术令机器未来的发展有可能使我们满怀敬畏:当那些由人类制造出来的机器具备了学习、适应、自我治愈、自我复制、甚至是进化的能力。这是一种我们还很难想象的能力,未来并不遥远。来自牛津大学人类未来研究所的Katja Grace及其研究小组以《人工智能何时超越人类》为题,发布了一篇研
究报告,该报告涵盖:人工智能在未来将具备的技能、实际应用,将在哪些领域实现人类工作的自动化,以及人工智能带来的社会与伦理影响等问题。据研究小组介绍,该项研究在人工智能领域是一个具有更大样本,更具代表性的研究。该项研究调查了全球1634名机器学习与人工智能领域的相 关专家(这些专家均在机器学习领域的两大顶级会议:2015国际机器学习大会与2015神经信息处理系统大会上发布过 论文),并收到352份回复。对于人工智能将在哪些领域具 备哪些技能,甚至何时超越人类,研究小组得出了以下数据:翻译语言2024年;撰写高中论文2026年;驾驶卡车2027年;在零售业工作2031年;写一本畅销书2049年;成为一名外科医生2053年;专家们相信:在45年内,人工智 能在各领域中有50%的机会超越人类,在120年内,能够实现所有人类工作的自动化。有趣的是,不同地区的专家对人工智能将在何时超越人类,有着较为显著的差异。例如:亚洲地区的受访专家较北美地区专家更相信这一时间会更早 到来。预测的重要性在很多时候并不在于其是否准确,而是为我们提供了关于未来的想象力,以及为之付出行动的动力。不管这些预测是否准确,人工智能无疑已经掀起人类有史以来最大幅度的科技变革。医疗、金融、教育、制造、能源、零售……任何行业都必须拥抱这一变革。在未来的许多年以后,机器或许也会出现这种疑惑:机器存在的意义到底是什
视觉传感的基本原理及应用领域 视觉传感器是整个机器视觉系统信息的直接来源,主要由一个或者两个图 形传感器组成,有时还要配以光投射器及其他辅助设备。视觉传感器的主要功 能是获取足够的机器视觉系统要处理的最原始图像。图像传感器可以使用激光 扫描器、线阵和面阵CCD摄像机或者TV摄像机,也可以是最新出现的数字摄像机等。 视觉传感器基本原理 视觉传感器具有从一整幅图像捕获光线的数以千计的像素。图像的清晰和 细腻程度通常用分辨率来衡量,以像素数量表示。因此,无论距离目标数米或 数厘米远,传感器都能“看到”十分细腻的目标图像。 在捕获图像之后,鼎纳视觉传感器将其与内存中存储的基准图像进行比较,以做出分析。 例如,若视觉传感器被设定为辨别正确地插有八颗螺栓的机器部件,则传 感器知道应该拒收只有七颗螺栓的部件,或者螺栓未对准的部件。 此外,无论该机器部件位于视场中的哪个位置,无论该部件是否在 360 度范围内旋转,视觉传感器都能做出判断。 视觉传感器应用领域 视觉传感器的低成本和易用性已吸引机器设计师和工艺工程师将其集成入各类曾经依赖人工、多个光电传感器,或根本不检验的应用。鼎纳自动化视觉 传感器的工业应用包括检验、计量、测量、定向、瑕疵检测和分捡。 应用范例: ①在汽车组装厂,检验由机器人涂抹到车门边框的胶珠是否连续,是否有正确的宽度。
②在瓶装厂,校验瓶盖是否正确密封、装灌液位是否正确,以及在封盖之前没有异物掉入瓶中在包装生产线,确保在正确的位置粘贴正确的包装标签在药品包装生产线,检验阿斯匹林药片的泡罩式包装中是否有破损或缺失的药片。 ③在金属冲压公司,以每分钟逾150片的速度检验冲压部件。
双目视觉传感器系统 视觉检测广泛地应用于工件的完整性、表面平整度的测量:微电子器件(IC芯片、PC板、BGA)等的自动检测;软质、易脆零部件的检测;各种模具三维形状的检测;机器人的视觉导引等。最具有吸引力的是由视觉传感器阵列组成的大型物体(如白车身)空间三维尺寸多传感器视觉检测系统。 双目视觉传感器由两台性能相同的面阵CCD摄像机组成,基于立体视差的原理,可完成视场内的所有特征点的三维测量,尤其是其它类型的视觉传感器所不能完成的测量任务,如圆孔的中心、三棱顶点位置的测量等。因此,双目视觉传感器是多传感器视觉检测系统的主要传感器之一。要实现双目视觉传感器直接测量大型物体关键点的三维测量,就必须知道传感器的内部参数(摄像机的参数)、结构参数(两摄像机间的位置关系)及传感器坐标系与检测系统的整体坐标系的关系(即全局标定)。因此,在实际测量之前,先要对摄像机进行参数标定。一般方法是,传感器被提供给整个系统使用前,就离线完成传感器的内部参数及结构参数的标定,采用一标准二维精密靶标及一维精密导轨,通过移动导轨来确定坐标系的一个坐标,通过摄像机的像面坐标及三个世界坐标的对应关系求得这些参数。 这种方法的缺点是:标定过程中,需要精确调整靶标与导轨的垂直关系,而且需多次准确移动导轨;同时标定过程的环境与实际测量的情形有差异;传感器在安装的过程中,易引起部分参数的变化,需多次的拆卸;摄像机还需进行全局标定。由此可知标定的劳动强度大,精度难以保证。本文提出了一种现场双目传感器的标定方法,只需先确定摄像机的部分不易变化的参数,其它参数在摄像机安装到整个系统后进行标定。该方法大大地减少了上述因素的影响,能得到满意的标定精度。 双目视觉测量探头由2个CCD摄像机和1个半导体激光器组成,如下图所示。