红外导航室内移动机器人的系统设计
韩红玲1,崔志恒2
(1.华北水利水电学院信息工程学院,河南 郑州450011;2.河南理工大学计算机科学与技术
学院,河南 焦作454000)
摘 要:移动机器人检测到电源电压较低时,给定位目标——充电装置发送无线电,充电装置收到无线电就发射红外线,对机器人进行导航。机器人不断采集红外信号,并用软件模拟脉宽调制的方法对驱动机器人双轮的电机进行实时控制,从而实现机器人对红外的跟踪。机器人检测到红外线信号较弱或者没有检测到红外线时,利用超声波、红外、红外光电等多种传感技术和经验丰富的专家系统进行避障、路径规划,无需图像处理,无需精确的环境模型,实现机器人以尽可能短的路径离开局部环境,快速跟踪红外线,最后准确定位于充电装置进行充电。
关键词:移动机器人;超声波;软件脉宽调制;路径规划
中图法分类:TP242.6 文献标识码:B
System Design of an Indoor Mobile Robot Navigated by
Infrared
HAN Hong-ling1, CUI Zhi-heng2
(1.North China Institute of Water Conservancy and Hydroelectric Power, Zhengzhou 450011,
China;
2. Henan Polytechnic University, Jiaozuo 454000, China)
Abstract:The mobile robot sends radio to a destination of power supply device when it detects that the voltage of power is insufficient. The device sends infrared to guide the robot in moving towards it as soon as it receives the radio. The robot successively collects the signals of the infrared, and the two motors that drive the bicycle of the robot are real-time controlled,which is realized by the software that simulates pulse width modulation。In doing this, the function of the robot to track infrared is achieved. Without image processing and precise environment model, the robot avoids collision and plans routes with many kinds of sensing technologies including ultrasonic, infrared, photoelectric, and with an embedded experienced expert system when it detects no or weak signals of the infrared, and then, it quickly leaves the local place and trails the infrared in the shortest distance, and is accurately located in the power supply device lastly.
Key words:mobile robot;ultrasonic;software pulse width modulation;path planning
本文主要采用超声波传感器来感知机器人所在的环境信息,利用红外线进行导航,实现机器人比较准确的红外跟踪和室内定位[1]。在利用超声波对环境进行探测时,由于超声波的角度误差,对于任意狭长通道、稠密不规则障碍物等环境,虽然现有加权平均值法、等距区域法、以及最近障碍物法、栅格图法等数据融合和环境描述法[2],但超声波对环境特征信息的感知能力依然较差。由于移动机器人无法记忆全部先验信息,目前路径规划问题仍无完整的物理规律和物理模型。本文融入多种传感技术,提高机器人对局部环境的感知能力,并加入嵌入式专家系统,通过不断反复实验,不断更新专家系统的知识库,让机器人从经验中不断学习,尽可能使机器人到达目的地——充电装置的路径最短。
1 硬件系统设计
1.1系统组成
本系统采用Atmel的AT89S52和义隆公司的EM78P156构成双MCU(Micro Controller Unit,
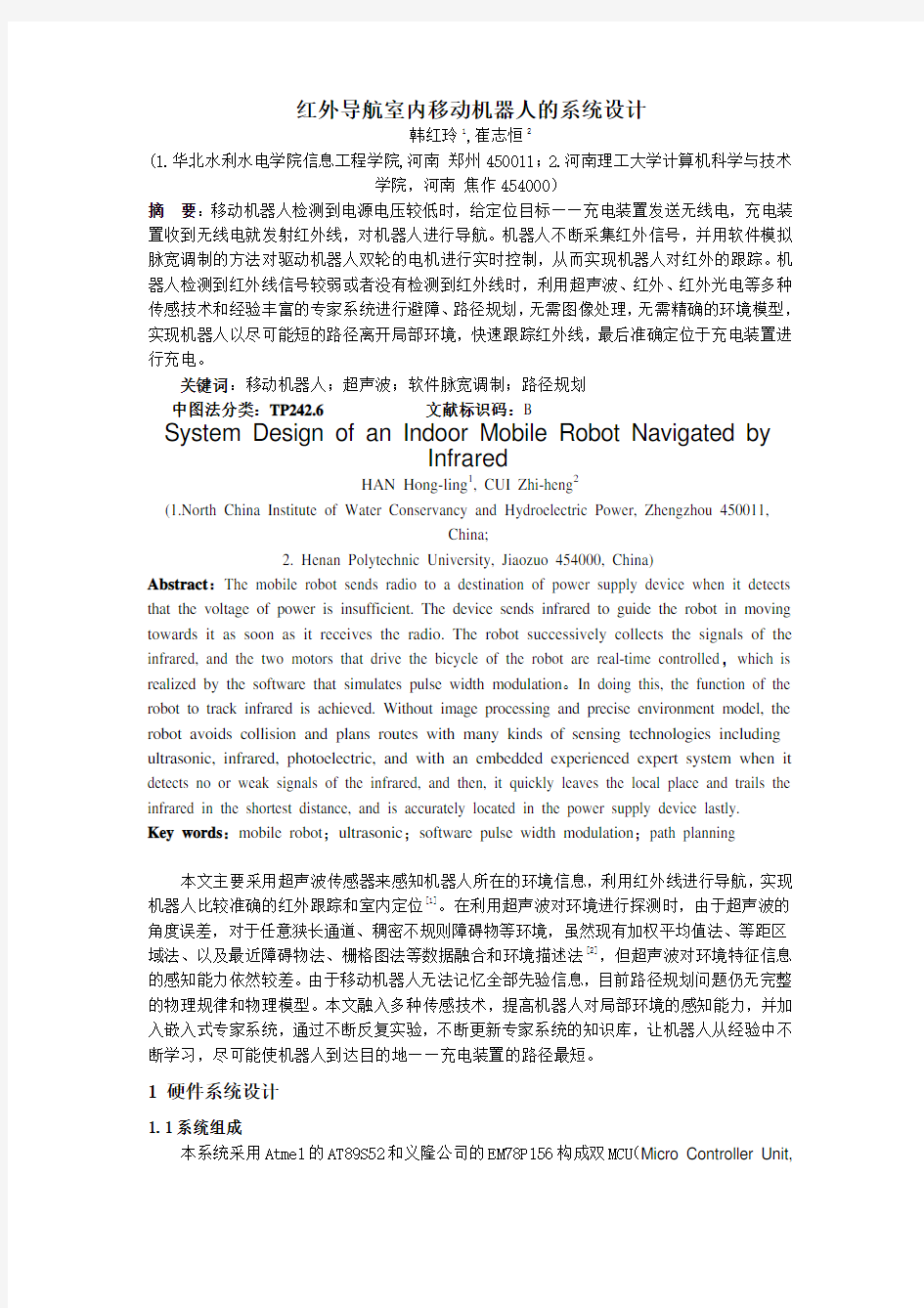
单片机)结构(图1),AT89S52为机器人的主处理芯片,EM78P156辅助工作。图1中,EM78P156检测到电压较低时,不断发送带Rolling Code(滚动码)的无线电给充电装置,充电装置收到无线电并解码,发射出红外线,机器人利用红外线进行导航。检测到红外信号较弱或者没有检测到红外线时,利用左、前两路超声测距、安全碰撞开关(左、前、右共三个)、红外光电传感器避碰。
图1 机器人系统结构图
1.2 超声波测距硬件设计
机器人在移动过程中的避碰问题,根据左路和前路超声波测到的到障碍物的距离进行避碰。测距用脉冲回波法,第一次收到物体反射回来的超声波与发送超声波之间的时间t乘以声音的速度v就是超声波传感器到被测物体之间距离s的2倍。声速v=(331.5+0.607T/℃)m/s,其中T为空气温度。
超声波的发送和接收电路相当成熟,笔者采用传统的变压器耦合方式实现40k超声波的发送。由AT89S52的P3.4端口产生40k的脉冲信号,经推挽式差分放大,变压器耦合传送频率信号给超声波传感器UCM40T发送。UCM40T发送时由AT89S52的P3.6端口和一个三极管控制,三极管截止时,超声波发射头振动发射超声波,发送5~8个脉冲后,P3.6输出高电平,三极管一直导通,发射头立即停止振动,从而实现消除超声波的余振。
接收用UCM40R收到超声波后,用音频解码芯片LM567锁相选频,检测40khz超声波。
1.3 红外采集设计
红外采集部分采用左、右两路成90°夹角红外接收头RPM-638接收,用与微控制器串口兼容的10位串行A/D转换芯片TLV1570进行模数转换,TLV1570为吞吐率1.25Mbps的高速A/D转换芯片。左、右两路红外接收传感器,分别与机器人两轮的连线成45°夹角,保证机器人在跟踪红外时,左、右红外传感器能感知到机器人“脸部”的左、右两侧红外强弱的不同,A/D转换后,对机器人左、右两轮进行软件PWM(Pulse Width Modulation,脉宽调制)控制,实时控制左右两轮的转速,动态控制机器人的运动方向和速度,实现红外跟踪。
1.4红外光电反射式传感器的应用
由于超声波传感器发散角较大,有一定的角度误差,并受物体颜色、空气温度等影响,对于房间结构较复杂、门口附近有障碍物等的环境,机器人在检测到电压较低,需快速向充电装置运动时,最难的就是对“门”、“窄通道”的识别。这时可以红外光电反射式传感器探测。本系统采用调制型红外光电反射,由CD4011多谐振荡器和红外发射管(波长930nm)
发射出一定频率的红外光,光敏二极管接收红外后,经锁相环音频译码器LM567选频,送往具有回差滞后特性施密特比较器,检测到白色的条带时输出高电平,其它颜色时输出低电平。这种调制型的传感器在白色条带边缘,输出状态不会发生抖动,而是快速实现状态转换。
左、右两个传感器安装于平行机器人两轮连线的底盘,间距为白条带宽度的2倍。当机器人从和墙壁夹角<45°方向经过门口时,两个传感器可以同时输出高电平,这时转动一定的角度,就可以轻松进入另一个房间。若和墙壁夹角≥45°方向经过门口,两个传感器不可能同时输出高电平,这时不需要转动角度,就可以进入“门口”。
2软件设计
2.1 系统设计
欠压(电压低于某电压值)前后设定三种状态:漫游、跟踪和中间,系统软件流程图如图2。检测到电压不低于一定的电压值时是漫游状态,检测到低电压和外面有红外时是跟踪状态,检测到低电压,但红外较弱或没检测到,处于中间状态,根据路径规划策略,寻找红外较强的方向,快速进入跟踪状态,跟踪过程中不断检测是否已经定位,若定位就停止电机,让机器人停下来充电,充电过程中不断检测是否充电满,若机器人的电压达到某值,就后退离开充电装置,进入漫游状态,在漫游状态可以设计其它的功能。
图2 系统流程图
2.2软件模拟PWM
2.2.1 PWM原理
机器人驱动两个轮子的电机采用桥式功放驱动,为了节约端口,用软件来实现驱动两个轮子的电机的单极性PWM控制。PWM调速的工作原理是电枢两端的电流呈脉动连续,随着正脉冲宽度越来越窄,电枢的平均电流越来越小,电机转速也就慢下来,反之,电机转速变快。
PWM脉冲频率F T =1/T, T为脉冲周期,F T 选择不恰当,会影响电枢电流的连续性,电机运行时可能产生剧烈振荡,因此应该谨慎选择切换频率。本系统T取20ms。
2.2.2 PWM软件实现
对左右两路红外传感器接收的信号进行采集,A/D转换后,根据红外信号的强弱,对左右两轮输出的正负脉冲宽度就不一样,信号弱的一侧,正脉冲要宽一些,对应电机电枢电流就大,转速就相对另一侧快些,从而实现机器人一直向红外信号强的一侧方向运动,即可实现动态红外跟踪。
设T为PWM脉冲周期,每隔T时间采集左右红外一次,根据第n次采集到左右两侧的红外信号,计算分配给对应侧电机的正负脉冲宽度,这时,T由t1(n)、t2(n)、t3(n)三部分
组成。
t1(n):左右两轮上的正脉冲宽度。
t2(n):红外较弱侧电机比另侧电机多加的正脉冲宽度。
t3(n):红外较弱侧电机的负脉冲宽度。
t2(n)+t3(n):红外较强侧电机的负脉冲宽度。
本系统在主程序对左、右“眼睛”红外信号各采集一次,实现对左右轮PWM控制的同步,然后不断给timer0的16位暂存器装t1(n),t2(n),t3(n),从而实现机器人驱动轮的电机进行软件PWM控制。
3 专家系统在路径规划中的应用
在中间和漫游状态时,系统需要路径规划[3][4]人快速向充电装置发射出的红外源移动。文中基于知识库的决策器是整个机器人软件系统设计中的一个主要部分,即“嵌入式”专家系统。
本系统采用产生式规则表示和运用专家知识,根据机器人移动过程中的所处环境的动态变化,结合数据库里的前进时间、后退时间、转角、转向、转速和中间状态时采集红外的放大倍数等参数,进行正向推理。利用左、前两路距离障碍物的距离,以室内墙壁为基本路标,室内顺时针移动,即右转向为主方向。若门口障碍物较多时,致使长时间内均右转向前进,定时系统和多角度前测距就会被激发,机器人开始综合推理,及时改变前进方向,快速找到出口。
例如规则:
IF 左侧距≤L1 THEN 左轮全速前进,右轮半速前进
IF 左碰 THEN 右转角度a1
IF 前碰 且 跟踪状态THEN 前碰开关失效
如果左路超声波测距测出离墙壁或障碍物距离小于等于L1时,即离障碍物距离较近,机器人左轮全速前进,右轮半速前进,这样机器人必向右倾斜前进,这样就可避免碰上左侧障碍物;如果左侧的碰撞开关碰到障碍物,则右转角度a1。在跟踪状态时,前碰开关必须屏蔽,否则,在跟踪过程中,尤其机器人走至充电装置前面时,影响快速定位的效率,起到阻碍作用。纵使陷入红外信号较强的局部,定时系统开始发挥作用,多角度超声前测距,找到出口就可快速离开局部环境。
4 结论
本文系统的综述了室内移动机器人如何有效的利用两路超声测距避碰、两路红外跟踪,最终定位。完全无需准确知道机器人当前所在准确位置,无需占用大量内存的图像处理,无需建立精确的环境模型,即可实现在不同的“室”避障、红外导航,最后准确定位于充电装置进行充电,对于机器人的进一步深入研究具有一定的借鉴意义。创新点有:机器人前进时利用左、前两路超声测距,以室内墙壁为基本路标,顺时针为主方向,实现局部避碰;融合红外光电传感器走出门口;加入专家系统进行智能路径决策;不断采集到红外信号,用软件模拟PWM实现对电机的实时控制,实现红外跟踪,这样既准确又节约硬件资源。
参考文献:
[1] 郑向阳,熊蓉,顾大强.移动机器人导航和定位技术[J].杭州:机电工程,2003,5(20):36—37。
[2] Howie Choset, Keiji Nagatani, Nicole A. Lazar. The Arc-Transversal Median Algorithm: A Geometric Approach to Increasing Ultrasonic Sensor Azimuth Accuracy[J].
America:IEEE Transactions on Robotics and Automation, 2003,19(3):515-521.
[3] 黎陟,蔡自兴.障碍物环境下机器人的连续避障策略[J].微计算机信息,2007,9-2:257-258。
[4] 张凤. 基于加速度空间的移动机器人避碰规划研究[D].沈阳:中国科学院沈阳自动化研究所博士论文, 2004:25-30。
作者简介
韩红玲(1978-),女(汉族),河南洛阳人,2005年华北水利水电学院硕士毕业,现为华北水利水电学院信息工程学院计算机专业助教,主要研究方向:计算机智能控制,集成电路应用。
Biography:
HAN Hong-ling Born in Luoyang city of Henan pronvice in 1978. She received B.S. and M.S. from North China Institute of Water Conservancy and Hydroelectric Power in 2001 and 2005 respectively, and then became a teacher there. Her research fields mainly are computer intelligent control and IC application.
算法设计与分析课程设计 题目:校园导航问题 文档: 物联网工程学院物联网工程专业 学号 学生姓名 班级物联网1101 二〇一三年十二月
设计要求:设计你的学校的平面图,至少包括10个以上的场所,每两个场所间可以有不同的路,且路长也可能不同,找出从任意场所到达另一场所的最佳路(最短路径)。 本系统为用户提供以下功能: (一)、查询了解学校概况,为导游参观者提供关于学校的相关信息。 (二)、查询校园各个场所和景点信息; (三)、为导游者或外来人员参观人员提供校园交通信息,方便用户走访学校。完成需要操作时,退出系统 校园导航查询系统的开发方法总结如下: (1) 需求分析,了解学校各个场所与场所或者是各个景点与景点之间的信息,路径和距离,考虑该如何设计才能满足用户需求。 (2) 概要设计,对调查得到的数据进行分析,根据其要求实现的功能分析系统结构和界面将实现的基本功能。 (3) 详细设计,设计系统界面并编辑实现其各个功能的代码。 (4) 调试分析,在设计完成后,调试系统运行的状况,修改完善系统,然后进行测试。 一、需求分析 1学校以及各景点介绍模块 采用一维数组将学校景点依次排放好编号G.vex[i].number=i 在选择校园介绍的时候,弹出G.vex[0]校园简介。在选择各景点信息的时候,可按编号查询2查询最短路径(主要) 查出出发地到想要到达的景点的最短路径,初步构想采用最经典的迪杰斯特拉算法最短路径函数 3查询各点距离 将所有景点的距离显示出来。 4主菜单页面显示 提供使用者选择功能界面,按照提示进行操作。 5退出 完成需要操作时,退出系统
校园导航系统模式图 二、概要设计 2.1算法设计说明 校园导航模型是由各个景点和景点以及场所和场所之间的路径组成的,所 以这完全可以用数据结构中的图来模拟。用图的结点代表景点或场所,用图的边 代表景点或场所之间的路径。所以首先应创建图的存储结构。结点值代表景点信 息,边的权值代表景点间的距离。结点值及边的权值采用图存储。本系统需要查 询景点信息和求一个景点到另一个景点的最短路径长度及路线,为方便操作,所 以给每个景点一个代码,用结构体类型实现。计算路径长度,最短路线和最佳路 径时可分别用迪杰斯特拉(Dijkastra )算法和哈密而顿回路算法实现。最后switch 选择语句选择执行浏览景点信息或查询最短路径和距离。 2.1.1学校以及各景点介绍模块 采用了图的邻接矩阵存储结构,首先初始化每一个景点名称(一维数组) fo r(i=1;i 非接触式测温仪的设计与制作 田云,黑龙江农业经济职业学院 本文介绍一种采用凌阳公司生产的TN9红外测温传感器来实现红外测温,控制器采用大家熟悉的51单片机。所有物体都会发出红外线能量。物体越热,其分子就愈加活跃,它所发出的红外线能量也就越多。红外线温度仪包括有光学装置,可以收集来自物体的辐射红外线能量,并把该能量聚焦在探测器上。能量经探测器转化为电信号,并被放大、显示出来。红外测温打破了传统的接触式测温模式,它根据被测物体的红外辐射能量来确定物体的温度,不与被测物体接触,具有不扰动被测物体温度分布场,温度分辨率高、响应速度快、测温范围广,稳定性好、可同时测量环境温度和目标温度的特点。近年来在汽车电子、航空和军事上得到越来越广泛的应用。 一、红外测温传感器TN9 红外测温传感器选用凌阳科技公司生产的TN9红外测温传感器,可测量目标温度和环境温度。它采用非接触测温手段,解决了传统测温中需要接触的问题,具有回应速度快、测量精度高、测量范围广以及可同时测量目标温度和环境温度的特点。红外测温模块根据大气状况最远测温距离约 30m,测量回应时间大约为 0.5s,而且,它具备 SPI接口,可以很方便地与单片机传输数据。外型如图1所示,它的基本特性如表1所示。 量程-33-220℃/-27-428℉ 工作温度-10-50℃/14-122℉ 精度±0.6℃ 反应时间1sec 重量8g 电压范围3V- 5V 图1 TN9红外测量传感器外型 1、红外测温传感器引脚 红外测温模块的引脚如图2所示。其中V为电源电压引脚VCC,VCC一般为 3V到 5V之间的电压;D为数据接收引脚,没有数据接收时D为高电平;C为 2KHz Clock输出引脚(这里需要注意,只有为TN9供上电源,C脚就有2KHz的方波信号输出);G为接地引脚;A为测温启动信号引脚,低电平有效。 图2 TN9红外测温传感器引脚 2、红外测温模块的工作时序 TN9红外模块的工作SPI时序如图3所示。 从时序图可以看出: TN9红外传感器向单片机发送一帧数据共有5个BYTE组成,每个BYTE位的含义如下: Item :如果为4CH代表此帧测量为目标温度,为66H代表此帧测量为环境温度。 MSB :数据高八位 LSB :数据低八位 SUM :校验位 SUM=Item+MSB+LSB CR :0DH为结束码 单片机在CLOCK的下降沿接收数据,一次温度测量需接收 5 个字节的数据,这五个字节中:Item为 0x4c表示测量目标温度,为 0x66 表示测量环境温度;MSB为接收温度的高八位数据;LSB为接收温度的低八位数据;Sum为验证码,接收正确时Sum=Item+MSB+LSB;CR 为结束标志,当CR为 0x0dH时表示完成一次温度数据接收。 红外测温方法的工作原理及测温仪 (北京化工大学信息科学与技术学院) 摘要:本文从黑体辐射原理出发分析了红外测温的工作原理,从发射率、距离系数、环境等几个方面,探讨和分析了测温误差的原因,以及基于红外测温技术的测温仪的简单的概述,并对红外测温仪的分类、性能、选择及应用简要的说明。 关键词:黑体辐射、红外测温仪、温度测量 Infrared Thermometer and the working principle of Infrared Temperature measurement (College of Science and Technology, Beijing University of Chemical Technology) Abstract: In this paper, the theory of infra-red temperature measurement was analyzed according to the principle of blackbody radiation. We discussed the main factors for measurement accuracy, such as reflectance, distance coefficient and environment.Based on infrared temperature measurement technology, we make a simple overview of infrared thermometer, and a brief description of its classification, performance, selection and application. Key words: Blackbody radiation; infrared thermometer; temperature measurement 0引言 在自然界中,当物体的温度高于绝对零度时,由于它内部热运动的存在,就会不断地向四周辐射电磁波,其中就包含了波段位于0. 75~100μm的红外线.红外测温仪就是利用这一原理制作而成的,温度是度量物体冷热程度的一个物理量,是工业生产中很普遍、很重要的一个热工参数,许多生产工艺过程均要求对温度进行监视和控制,特别是在化工、食品等行业生产过程中,温度的测量和控制直接影响到产品的质量和性能。传统的接触式测温仪表如热电偶、热电阻等,因要与被测物质进行充分的热交换,需经过一定的时间后才能达到热平衡,存在着测温的延迟现象,故在连续生产质量检验中存在一定的使用局限。目前,红外温度仪因具有使用方便,反应速度快,灵敏度高,测温范围广,可实现在线非接触连续测量等众多优点,正在逐步地得以推广应用。表1列出了常用的测温方法和特点,其中红外测温作为一种常用的测温技术显示出较明显的优势。 表1常用测温方法对比 测温方法温度传感器测温范围(°C)精度(%) 接触式热电偶-200~1800 0.2~1.0 热电阻-50~3000.1~0.5非接触式红外测温-50~33001其它示温材料-35~2000<1 单片机系统设计实例 红外遥控小车 专业:信息对抗技术 姓名:吴志飞 学号:1411050121 指导教师:张东阳 目录 1 绪论 (1) 2 系统分析 (2) 2.1系统框架 (2) 2.2电机驱动模块 (3) 2.3 LCD显示模块 (4) 3 系统硬件设计 (5) 3.1主控模块的电路设计 (6) 3.1.1AT89C51单片机的简介 (8) 3.1.2AT89C51管脚功能 (8) 3.2红外遥控模块的电路设计 (9) 3.2.1红外遥控的实现原理 (10) 3.2.2红外发射器 (11) 3.2.3红外接收器 (12) 3.3电机驱动模块的电路设计 (12) 3.4显示模块的电路设计 (13) 4 系统软件设计 (14) 4.1程序代码 (14) 4.2软件流程图 (17) 5 调试与仿真 (18) 5.1在keil中进行调试 (18) 5.2在Proteus中进行仿真 (19) 6 总结 (21) 参考文献 (22) I 沈阳理工大学课程设计说明书 1 绪论 随着计算机、微电子、信息技术的快速进步,智能化技术的开发速度越来越快,,智能化程度越来越高,应用范围也越来越广,包括海洋开发、宇宙探测、工农业生产、军事、社会服务、娱乐等各个领域。智能电动小车系统以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科。主要由路径识别、角度控制及车速控制等功能模块组成。同时,当今机器人技术发展的如火如荼,其在国防等众多领域的应用广泛开展。神五、神六升天、无人飞船等等无不得益于机器人技术的迅速发展。一些发达国家已把机器人制作比赛作为创新教育的战略性手段,参加者多数为学生,目的在于通过大赛全面培养学生的动手能力、创造能力、合作能力和进取精神,同时也普及智能机器人的知识。从某种意义上来说,机器人技术反映了一个国家综合技术实力的高低,而智能电动小车是机器人的雏形,它的控制系统的研制将有助于推动智能机器人控制系统的发展,同时为智能机器人的研制提供更有利的手段。 本次课设设计的红外遥控智能小车可以分为四大组成部分:红外遥控部分、显示部分、执行部分、控制部分。智能小车可以实现按遥控指示前行,后退,左转和右转。该设计主要通过对系统硬件电路的设计,软件设计和程序的编写,然后通过后期软硬件调试达到设计初衷。 1 红外报警系统建设方案 2016.05.31 第一章系统概述 (1) 1.1系统的意义 (1) 1.2系统的功能 (1) 1.3系统的类别 (2) 1.4主动红外报警系统 (2) 第二章系统方案设计 (2) 2.1系统构成图 (3) 2.2前端探测器 (3) 2.3信道传输 (4) 2.4中心控制部分 (5) 第三章主要设备参数 (5) 3.1中心设备 (5) 3.2前端设备 (5) 第四章设备安装方案......................................... 错误!未定义书签。第五章设备报价及清单.. (7) 第一章系统概述 1.1系统的意义 随着社会的发展,人们安防意识的提高,现代化的安防技术得到了广泛的应用。在一些重要的区域,如工厂、苗圃、机场、军事基地、武器库、监狱、银行金库、博物馆、发电厂、油库等处,为了防止非法的入侵和各种破坏活动,传统的防范措施是在这些区域的外围周界处设置一些(如铁栅栏、围墙、钢丝篱笆网等)屏障或阻挡物,安排人员加强巡逻。在目前犯罪分子利用先进的科学技术,犯罪手段更加复杂化、智能化的情况下,传统的防范手段己难以适应要害部门、重点单位安全保卫工作的需要。人力防范往往受时间、地域、人员素质和精力等因素的影响,亦难免出现漏洞和失误。因此,安装应用先进的周界探测报警系统就成为一种必要措施。周界探测,一旦发现入侵者可立即发出报警,好像在重要区域的周界处墙加了一道人眼看不见的“电子围墙”忠诚地守卫着要害目标。 1.2系统的功能 周界防护系统主要是对非出入通道的周边区域进行监视和管理,目的在于防止非法入侵。通常情况下周界的范围较大,不同的周界,条件和环境也不同,往往单靠人防很难实行全面而有效的管理。而周界报警系统可对周界区域实施24小时实时报警,并可进行计算机化管理,使管理人员能及时准确地了解苗圃周边环境的实际情况,遇有非法入侵能自动报警,自动显示报警区域;自动记录警情及自动转发报警信息;配以视频监控能实时而直观地观察和记录布控现场的实际情况,为警情核实及警后处理提供切实可靠的资料。 本系统的设计思路是,以满足目前的应用为出发点,合理优化设计方案;并兼顾未来的应用需求和技术发展,为系统在技术上提供有效的平滑过渡环境。 本系统做成后能够达到的目的: 设置报警系统的目的是:建立安全可靠的环境,加强货车出入口的安全管理管理,防止因车辆盲区造成的安全事故,保证厂区内部的安全,辅助工作人员对于厂区的安防管理,达到当货车到达自定区域前提前预警报警的作用。 数据结构课程设计-校 园导航 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN 课程设计报告 课程名称数据结构课程设计题目校园导航 指导教师 设计起始日期 5.9~5.16 学院计算机学院 系别计算机科学与工程 学生姓名 班级/学号 成绩 一、需求分析 本次实验设计的任务是实现一个简易的北京信息科技大学的校园导航平面图。设计要包括下列要求: 设计你的学校的平面图,至少包括10个以上的场所,每两个场所间可以有不同的路,且路长也可能不同,找出从任意场所到达另一场所的最佳路径(最短路径)。 本课题实现校园多个场所(至少10个)的最短路径求解。 (1)输入的形式和输入值的范围:本系统主要数据类型为字符型char及整形int,char型主要包括单位编号,单位名称,单位简介,功能编号;输入功能编号与单位编号进行操作。 (2 ) 输出的形式:输出则通过已有的信息数据,通过相关的操作输出相应信息。 (3) 程序所能达到的功能:本程序可供任何人使用,主要功能1.浏览各单位及简介;2.查看所有游览路线;3.选择出发点和目的地求出最佳路径;4.查看某一单位信息。 (4)测试数据:包括正确的输入及其输出结果和含有错误的输入及其输出结果。 a.首先看到的是校园导航系统的菜单: b.查看浏览路线等待输入起始景点: C.选择出发点与目的地等待输入起始景点与目的地编号: d.参看景点信息等待输入景点编号: 二、概要设计 本系统包含一个文件。设计分有菜单,显示信息,弗洛伊德算法,迪杰斯特拉算法,查找景点信息等程序段。主程序为整系统的入口处,菜单主要实现显示系统功能,显示信息主要实现显示景点信息,弗洛伊德算法主要实现求两景点之间最短路径,迪杰斯特拉算法实现求两景点之间最短路径,查找景点信息主要实现显示某一景点信息。 系统首先通过主程序调用void main( );进入系统主菜单函数,根据用户的选择可分别进入:1.浏览各景点及简介;2.查看所有游览路线;3.选择出发点和目的地求出最佳路径;4.查看景点信息;5.退出系统。 选择“浏览各景点及简介”项,显示十个景点的有关信息,包括景点编号,景点名称,景点简介。 选择“查看所有游览路线”项,会进入输入起始景点编号的界面,输入正确编号后会显示起始景点到其余九个景点的最短路线的方案。 选择“选择出发点和目的地”项,会进入输入起始景点与目的景点的界面,输入起始景 点与目的景点,并有空格隔开就得到两景点之间的最佳路径。 选择“查看景点信息”项,会进入输入要查看的景点的界面,如入后会显示该景点的有关信息。 选择“退出系统”项,就会退出程序。 三、详细设计 (1)十三个单位的图 第1章红外解码系统分析 第1节设计要求 整个控制系统的设计要求:被控设备的控制实时反应,从接收信号到信号处理及对设备控制反映时间应小于1s;整个系统的抗干扰能力强,防止误动作;整个系统的安装、操作简单,维护方便;成本低。 红外载波、编码电路设计要求:单片机定时器精确产生38KHz红外载波;根据控制系统要求能对红外控制指令信号精确编码并迅速发送。 红外解码电路设计要求:精确接收红外信号,并对所接收信号进行解码、放大、整形、解调等处理,最后输出TTL电平信号;对非红外光及边缘红外光抗干扰能力强。 设备扩展模块设计要求:直流控制交流;抗干扰能力强;反应迅速不产生误动作;能承受大电流冲击。 第2节总体设计方案 2.1方案论证 驱动与开关 方案一:采用晶闸管直接驱动。 其优点是体积小,电路简单,外围元件少。但控制电流小,大电流晶闸管成本高,并且隔离性能差。 方案二:采用三极管驱动继电器。 其体积大,外围元件多。优点是控制电流大,隔离性能好。 根据实际情况,拟采用方案二。 2.2总体设计框图 经过上述方案的分析选择,得出系统硬件由以下几部分组成:电视红外遥控器,51单片机最小系统,接收放大于一体集成红外接收头,1602液晶显示驱动电路。 整体设计思路为:根据扫描到不同的按键值转至相对应的ROM表读取数据。确认设备及菜单选择键后AT89S2将从ROM读取出来的值,按照数据处理要求从P2.5输出控制脉冲与T0产生的38KHz的载波(周期是26.3μs)进行调制,经NPN三极管对信号放大驱动红外发光管将控制信号发送出去。红外数据接收则是采用HS0038一体化红外接收头,内部集成红外接收、数据采集、解码的功能,只要在接收端INT0检测头信号低电平的到来,就可完成对整个串行的信号进行分析得出当前控制指令的功能。然后根据所得的指令去操作相应的用电器件工作,如图1-1所示。 红外线防盗报警器课程设计报告 北华航天工业学院 课程设计报告(论文) 设计课题:红外线防盗报警器设计 专业班级: B10231 学生姓名: 指导教师: 设计时间: 2012年6月25日 北华航天工业学院电子工程系 红外线防盗报警器课程设计任务书姓名: 专业: 通信工程班级: B10231 指导教师: 职称: 课程设计题目: 红外线防盗报警器 已知技术参数和设计要求: , 该报警器能探测人体发出的红外线,当人进入报警器的监视区域内,即可发出报警声, 适用于家庭、办公室、仓库、实验室等比较重要场合防盗报警。 , 要求: , 1、灵敏、可靠、一经触发,即刻报警 , 2、对产品材料精益求精,延长使用寿命 , 3、根据实际应用环境,自己选择传感器,确定红外检测范围。所需仪器设备: 直流供电电源,信号发生器,双踪示波器,数字电压表,计算机等 成果验收形式: 面包板插接+实物演示+答辩 参考文献: 《电子技术基础模拟部分》(高教康华光) 《电子工艺与课程设计》(电子工业出版社毕亚军、崔瑞雪) 第17周: 周1---周2 :立题、论证方案设计~选择元器件安装调试 周4---周5 :插面包板调试电路时间 第18周: 安排 周1---周3 :焊接制成电路~完成设计 周4---周5 :验收答辩 指导教师: 张洁教研室主任: 崔瑞雪 2012年6 月 14 日 内容摘要 红外线防盗报警器目前市场上已有成型产品,且市场较为成熟。由于红外线是不可见光,因此用它进行红外探测监控,具有良好的隐蔽性,白天和黑夜均能使用,而且其抗干扰能力强。红外线传感器分主动式与被动式两种,主动式设计方案简单,但成本较高,从成本考虑,本课题通过介绍热释红外传感器RE200BP的工作原理,给出了一种被动型热释电红外报警器的结构原理及其应用电路。这种电路把红外线传感器应用于报警系统中,从而能够实现防盗报警能。 该报警器能探测人体发出的红外线,由红外线传感器、信号放大电路、电压比较器、和报警指示电路等组成。当人进入报警器的监视区域内,即可发出报警信号,适用于家庭、办公室、仓库、实验室等比较重要场合防盗报警。利用热释电红外传感器设计了一种被动式红外报警电路,分析了该电路的功能和工作原理。 关键词被动式红外报警器;热释电传感器;菲涅尔透镜;防盗报警器 目录 题号:第七题 题目:校园导航问题 1,需求分析: 设计你的学校的平面图,至少包括10个以上的景点(场所),每两个景点间可以有不同的路,且路长也可能不同,找出从任意景点到达另一景点的最佳路径(最短路径)。 要求: (1)以图中顶点表示校园内各景点,存放景点名称、代号、简介等信息;以边表示路径,存放路径长度等有关信息。 (2)为来访客人提供图中任意景点相关信息的查询。 (3)为来访客人提供任意景点的问路查询,即查询任意两个景点之间的一条最短路径。 (4)修改景点信息。 实现提示: 一般情况下,校园的道路是双向通行的,可设计校园平面图是一个无向网。顶点和边均含有相关信息。 选做内容: (1)提供图的编辑功能:增、删景点;增、删道路;修改已有信息等。 (2)校园导游图的仿真界面。 2,设计: 2.1 设计思想: <1>,数据结构设计: (1)图。采用邻接矩阵存储,其中图所用到的结构体为: typedef struct { SeqList vertices; //表示图中的顶点 int Edge[MaxVertices][MaxVertices]; //表示图中的边 int numOfEdge; //表示图中边的数目}AdjMGraph; (2)景点。用顺序表存储。所用到的结构体为: typedef struct { char name[20]; //顶点名称 int code; //顶点代号 char introduction[50]; //顶点信息简介 }DataType; (3)景点之间的连接描述,所用到的结构体为: typedef struct { int row; int col; int weight; }RowColWeight; 用图来存放所提供的所有景点,然后用线性表来存放每一个景点的信息,其中包括景点的名称,代号,信息简介,以及其它的一些信息。这样就将对景点的操作,变成对图中各顶点的操作。 <2>,算法设计: 关于本课题的算法,很大部分来源于这学期数据结构课程的学习,其中包括: 毕业设计(论文)开题报告表 学生姓名学号090201042 所在学院信息学院专业、班级 指导教师指导教师单位 指导教师指导教师单位 毕业论文题目基于单片机红外测温仪的设计 开题报告内容 选题依据(选题经过,国内、国外研究现状,初步设想及突破点等)红外测温仪在工业领域广泛应用,但由于医用红外测温仪的特殊要求。1989 年以来,热释电耳道式测温仪才成功的用于体温测量,1991 年以后该产品已遍及欧美市场。我国在这方面的起步较晚。 2003 年,由中科院物理研究所王树铎教授研制的“非接触、口腔式红外线电子体温仪”才获得专利授权。在此之前,完全不与人体接触、又满足医疗测量精度要求的体温计还没有面世。 随着医疗技术的快速发展,人们对非接触、快速有效测温技术的需求越来越大,传统的接触式人体测温仪已经不能满足现代医用领域的测温需求。红外测温仪具有安全、可靠、非接触、快速、准确、方便、寿命长等方面不可替代的优势,已被越来越多的医疗行业认识和接受。 2003 年我国遭受非典型肺炎传染性疾病(SARS),2009 年全球甲型H1N1 流感的肆虐,这些事件的发生,使人们越来越注重公共卫生安全。非接触、高精度医用红外测温仪的研究,对于公共场合、大流量人群的快速检测具有重要的意义,它不仅具有巨大的商业价值,而且具有重大的社会价值。本次设计初步设想是设计一种基于51 单片机的热释电红外测温仪。它以黑体辐射定律作为理论基础,是光学理论和微电子学综合发展的产物。红外信号经过光学系统聚焦在热释电探测器上并转变为相应的电信号,此信号经过放大、滤波、A/D 转换,再送到单片机中进行数据的处理、补偿,最后送到液晶显示单元显示。红外测温仪是一种将红外技术与微电子技术结合起来的一种新型测温仪器,它通过将被测物表面发射的红外波段辐射能量通过光学系统汇聚到红外探测器件上,使其产生一个电压信号,该信号经过放大、滤波、模/数转换后送到微控制器中进行温度补偿与数据处理,最后将目标温度值以数字形式显示在显示屏上。 课程设计 基于单片机的红外遥控系统设计 学院:计算机与通信工程学院 专业:通信工程 班级:通信11-3班 姓名: 学号: 天津理工大学 摘要 本设计采用51单片机作为遥控发射接收芯片,HS003B作为红外一体化接收发射管,在此基础上设计了一个简易的智能红外遥控系统。系统包括接收和发射两大部分,发射部分有16个按键,接收部分含有8盏彩色LED灯、一片二位数码管和蜂鸣器系统。发射部分通过键盘扫描判断哪个键被按下,经过单片机编码程序进行编码,控制红外发射电路发送信号。接收部分解码信号,实现相应的输出。本设计方案结合红外遥控设计简单、作方便、成本低廉等特点。 关键字:红外遥控信号调制编码解码 天津理工大学 目录 摘要................................................................................................................................................... I I 1.绪论 (1) 1.1课题目的和意义 (1) 1.2红外线简介 (1) 1.3红外遥控系统简介 (1) 2 课题方案和设计思路 (2) 2.1总体方案 (2) 2.2红外发射器设计 (3) 2.2.1红外发射器原理 (3) 2.2.2红外编码 (3) 2.3红外接收端设计 (4) 3硬件结构设计与介绍 (5) 3.1AT89C51系列单片机功能特点 (5) 3.1.1主要特性 (5) 3.1.2管脚说明 (5) 3.1.3基本电路 (7) 3.2红外发射电路 (8) 3.3红外接收电路设计 (9) 3.3.1红外接收模块 (9) 3.3.2数码管 (9) 3.3.3彩灯系统 (10) 3.3.4蜂鸣器系统 (11) 3.3.5红外接收端电路图 (12) 4 软件设计 (12) 4.1定时/计数器功能简介 (12) 4.2遥控码的发射 (13) 4.3红外接收 (14) 5.课程设计总结和心得 (15) 参考文献 (16) 附录 (17) 附录1P ROTEUS仿真图 (17) 附录2发射程序 (17) 附录3接收程序 (20) 微机原理与单片机系统课程设计 专 班 姓 名: 学 兰州交通大学自动化与电气工程学院 2014 年 12 月 31 日 基于51单片机的红外防盗报警器的设计 1设计说明 1.1设计目的 该设计以单片机AT89C51芯片为核心,加上必要的外围电路,构成了一个基于单片机的红外线防盗报警器。功能主要通过软件编程来实现,降低了硬件电路的复杂性和制作成本。此外,设计中所采用的红外线是不可见光,有很强的隐蔽性和保密性,以满足现代人们住宅防盗的需要。 1.2设计要求 该设计要求当热释电红外线传感器探测到人体辐射的红外线时,单片机控制电路启动声光报警并显示报警次数。此外,用户还可以设定报警时间并手动解除报警。 1.3设计方法 该设计以AT89C51单片机为核心,由时钟电路、复位电路、外部触发电路、报警时间选择电路、声光报警电路、报警次数显示电路和中断报警电路共同组成报警系统。系统具有显示报警次数,设定报警时间,手动解除报警的功能。 2设计方案及原理 2.1设计方案简述 该设计使用AT89C51单片机芯片控制电路,通过热释电红外传感器采集外部触发信号,采用7段LED数码管显示报警次数,采用蜂鸣器和红色发光二极管实现声光报警,手动解除报警功能由单片机外部中断实现,报警时间由单片机内部定时器实现。 2.2热释电红外传感器简单介绍 热释电红外线(PIR)传感器是80年代发展起来的一种新型高灵敏度探测元件。是一种能检测人体发射的红外线而输出电信号的传感器,它能组成防入侵报警器或各种自动化节能装置。它能以非接触形式检测出人体辐射的红外线能量的变化,并将其转换成电压信号输出。将这个电压信号加以放大,便可驱动各种控制电路。 2.3 PIR的原理特性 热释电红外线传感器主要是由一种高热电系数制成的探测元件,在每个探测器内装入一个或两个探测元件,并将两个探测元件以反极性串联,以抑制由于自 课程设计报告 课程名称数据结构课程设计题目校园导航 指导教师 设计起始日期 5.9~5.16 学院计算机学院 系别计算机科学与工程 学生姓名 班级/学号 成绩 一、需求分析 本次实验设计的任务是实现一个简易的北京信息科技大学的校园导航平面图。设计要包括下列要求: 设计你的学校的平面图,至少包括10个以上的场所,每两个场所间可以有不同的路, 且路长也可能不同,找出从任意场所到达另一场所的最佳路径(最短路径)。 本课题实现校园多个场所(至少10个)的最短路径求解。 (1)输入的形式和输入值的范围:本系统主要数据类型为字符型char及整形int,char 型主要包括单位编号,单位名称,单位简介,功能编号;输入功能编号与单位编号进行操作。 (2 ) 输出的形式:输出则通过已有的信息数据,通过相关的操作输出相应信息。 (3) 程序所能达到的功能:本程序可供任何人使用,主要功能1.浏览各单位及简介; 2.查看所有游览路线; 3.选择出发点和目的地求出最佳路径; 4.查看某一单位信息。 (4)测试数据:包括正确的输入及其输出结果和含有错误的输入及其输出结果。 a.首先看到的是校园导航系统的菜单: b.查看浏览路线等待输入起始景点: C.选择出发点与目的地等待输入起始景点与目的地编号: d.参看景点信息等待输入景点编号: 二、概要设计 本系统包含一个文件。设计分有菜单,显示信息,弗洛伊德算法,迪杰斯特拉算法,查找景点信息等程序段。主程序为整系统的入口处,菜单主要实现显示系统功能,显示信息主要实现显示景点信息,弗洛伊德算法主要实现求两景点之间最短路径,迪杰斯特拉算法实现求两景点之间最短路径,查找景点信息主要实现显示某一景点信息。 红外测温仪设计方案 红外测温仪已被证实是检测和诊断电子设备故障的工具。可节省大量开支,用红外测温仪,你可连续诊断电子连接问题和通过查找在DC电池上的输出滤波器连接处的热点,以检测不间断电源(UPS)的功能状态,你可检验电池组件和功率配电盘接线端子,开关齿轮或保险丝连接,防止能源消耗;由于松的连接器和组合会产生热,红外测温仪有助于识别回路中断器的绝缘故障。或监视电子压缩机;日常扫描变压器的热点可探测开裂的绕组和接线端子。 目录 1.红外测温仪的原理构造 2.红外测温仪的分类 3.红外测温仪的技术参数 1.红外测温仪的原理构造 红外测温仪是把从被测物接收的红外线,由透镜经过滤波器聚焦 在检波器上,检波器通过被测物辐射密度的积分,产生一个与温度成比例的电流或电压信号,在此后相连接的电器部件中,把此温度信号线性化,发射率区域的修正,及转换成一个标准的输出信号。原理上有便携式测温仪和固定式测温仪两种,因此,在选择合适的红外测温仪用于不同的测量点时,以下的特征将是主要的:1、瞄准器瞄准器有此作用,测温仪所指的测量块或测量点可以看见,大面积的被测物可以经常不要瞄准器。在小的被测物和较远的测量距离时,瞄准器以透光镜形式带有仪表板刻度或激光指向点是值得推荐的。2、透镜透镜确定测温仪的被测点,对大面积的物体来说,一般带有固定焦距的测温仪足够可以。但在测量距离远离聚焦点时,测量点边缘的图像将不清楚。为此,采用变焦镜更好,在所给予的变焦范围内,测温仪可调整测量距离,新的测温仪带有变焦的可替换镜头,近透镜和远透镜可不需校准复检进行更换。 2.红外测温仪的分类 红外线测温仪三大分类:(1)人用红外线测温仪:额温型红外线体温计(以下简称额温计)是一种利用红外接收原理测量人体的测温计。使用时,只须方便的将探测窗口对准额头位置,就能快速、准确的测得人体温度。(2)工业红外测温仪:工业红外测温仪测量物体的表面温度,其光传感器辐射、反射并传输能量,然后能量由探头进行收集、聚焦,再由其它的电路将信息转化为读书显示在机上,本机配备的激光灯更能对准被测物及提高测量精度。(3)畜牧业动物红外测温仪测温仪:兽用红外线非接触体温计根据普朗克原理,通过准确测定动物体表特定部位的体表温度,修正体表温度与实际温度的温差,便能准确显示出动物的个体体温。 红外遥控发射和接收系统设计 摘要 本设计是以红外技术为基础,可以实现无线遥控,摆脱了信息传递需要导线的限制,而且红外实现方式灵活,得到了广泛的应用。特别是随着芯片技术的发展,红外集成芯片价格的降低,更加扩展了红外的应用范围。现在在我们的日常生活中都能感受到红外的应用,以及它给我们带来的便利。本设计充分利用能够很容易买到的普通电视机遥控器,通过编码发射红外线,然后由通用红外接收芯片sw0038实现对红外的接收,但是因为考虑到题目的要求仅仅是实现对一个开关的简单开管控制,所以舍弃了依靠单片机来对遥控器发出的红外进行解码实现多种控制的方案。本方案简洁可行,充分利用现有的资源进行开发,取得比较好的效果,并且具有良好的移植性,可以通过简单的修改就应用到其他领域。 关键字:红外遥控红外解码双稳态 Abstract This design is take the infrared technology as a foundation, realizing the wireless remote control, getting rid of the the limit of wire information transmission. Beacause infrared technology is easy to be realized,it is widely used in many fields. Specially ,with the chip technology development, infrared integrated chip price reducing, even more expanded the infrared application scope . Now in our daily life ,we can feel the application of the infrared, and the convenience it has brought us.In this design,I take ordinary television remote control device to realize coding and Infrared Emission,then it is received by the general infrared receive chip sw0038 .what the topic requests is merely the realization of a simple switch control,so I give up the program on the MCU. The program is simple and feasible, making full use of the existing resources for development, and achieve fairly good results.It has a good portability,so only after a little change,it can be transplanted to other fields. Key word: infrared remote control infrared decode bistability 1系统设计的目的意义 1.1 目的 报警器在现实生活中应用非常的广泛,家庭防盗,汽车安全防盗,企业内部安全保障,特别是金融行业等。一般传统式的报警器采用机械式的,如压电式报警器,当有入侵者将压力施加与压电传感器时,机械能在压电传感器中转化为电能,通过放大电路,将信号方法,从而带动发声报警装置,这类报警装置通过物体的接触实现信息的采集,容易被发现,隐蔽性能差,容易遭到破坏,而且传统式的报警器使用寿命短,造成不必要的经济浪费。本次设计目的在于设计以红外传感器为基础的红外线传感器,红外线是一种不可见的光,任何物体都会发出红外线,所以其隐蔽性能非常的好。如果采用被动式的红外探测,只需要将红外传感器远探测人体发射的红外线,探测装置无需与被测物体直接接触,就可以感受到入侵者的进入。本设计就才用被动式红外探测的方式,当有入侵者入侵时候,红外探测头会感受到人体发出的红外信号的变化,通过放大电路,将红外传感器中微小的电信号进行放大,并将信号输入到单片机中,单片机中的程序将传感器发送来的信号做处理并发送到光报警系统和声音报警系统中,光报警系统在接受到信号后,红灯亮10S,声音报警系统在接收到信号后,扬声器响10S,当10后,单片机重新检测是否还有红外传感器发送来的信号,如果还有,声光报警系统将继续工作。通过中断系统,可以实现声光报警系统在10S内暂停。这样就可以方便的控制报警系统的中断了。 1.2 国内外进展情况 红外线报警器是紧跟着光敏传感器和物体的红外效应而出现的。美国军方是最早使用红外探测技术的国家,上世纪美国军方研制出以主动红外方式导引的精确制导炸弹,这可能是红外探测物体最早应用的实例。我国发展红外报警系统的时间起步比较晚,直到上世纪末才出现对红外报警系统的研究。但是这并没有阻碍我国红外技术的进步,从 《校园导航系统》课程设计报告 姓名: 学号: 班级:网络 专业:网络工程 指导教师: 时间:2 目录 摘要 (1) 1.题目 (1) 2.概要设计 (1) 3.调试分析 (15) 4.参考文献 (15) 1.题目 校园导航系统 设计一个校园导游程序,后台操作: 1、操作员信息管理如修改密码等 2、能根据学校的规模进行添加景点信息、修改景点信息等功能, 3、若临时有交通管制,能进行交通管制的设置和撤销(如某某时间段那条路进行那个方向的交通管制等) 前台为来访的客人提供各种信息查询服务: 1、设计学校的校园平面图,所含景点不少于10个。以图中顶点表示校内各景点,存放景点名 称、代号、简介等信息;以边表示路径,存放路径长度等相关信息。 2、为来访客人提供图中任意景点相关信息的查询。 3、提供途中任意景点问路查询,即求任意两个景点间的一条最短的简单路径。 1.1 需求分析 设计一个校园导航系统,导航系统又分为游客和管理员。要进行管理操作还是游客操作由用户自己选择 管理员的操作:修改景点信息、增加景点信息、交通管制等。 游客的操作:查看景点信息和查最短路径。 2.概要设计 景点的信息由一维数组存放,景点关系由二维数据来存放 景点的信息和关系从文件读取,进而初始化 typedef struct //保存单个景点信息的结构体 { char code[10]; //存放景点代码 char name[20]; //存放景点名称 char instruction[100]; //存放景点简介 }ViewPoint; typedef struct //存放景点关系的二维数组 { int edges[MAXV][MAXV]; //两景点间的距离 int number; //景点的数量 ViewPoint V[MAXV]; //保存景点信息的结构体数组 }MGraph; 非接触式红外测温仪设计 摘要 温度测量技术应用十分广泛,而且在现代设备故障检测领域中也是一项非常重要的技术。但在某些应用领域中,要求测量温度用的传感器不能与被测物体相接触,这就需要一种非接触的测温方式来满足上述测温需求。本论文正是应上述实际需求而设计的红外测温仪。 红外测温仪是以黑体辐射定律作为理论基础,是光学理论和微电子学综合发展的产物。与传统的测温方式相比,具有响应时间短、非接触、不干扰被测温场、使用寿命长、操作方便等一系列优点。 本文介绍了红外测温仪测温的基本原理和实现方法,提出了以STC89C51单片机为其核心控制部件的红外测温系统。详细介绍了该系统的构成和实现方式,给出了硬件原理图和软件的设计流程图。该系统主要由光学系统、光电探测器、显示输出等部分组成。光学系统汇集其视场内目标的红外辐射能量,红外能量聚焦在光电探测仪上并转变为相应的电信号。STC89C51单片机负责控制启动温度测量、接收测量数据、并按照单片机中的温度值计算算法计算出目标的温度值再通过LED把结果显示出来。 关键词: STC89C51单片机,红外测温,LED显示 THE DESIGN OF NON-CONTECT INFRARED THERMOMETER ABSTRACT The technology of temperature measurement is used widespread, and it also important in the modern equipment failure examination field. But in some application domains, we needn’t the sensor contact with the measured object which used in temperature measurement, this needs a kind of non-contact temperature measurement to satisfies the demand and the design of this infrared thermometer is also based on the demand. Infrared thermomter, it uses the blackbody radiation laws as the theories foundation, it is the outcome that the optical theories and micro-electronics learn a comprehensive development. Compared to the way of traditional temperature measurement, it has a series of merits, such as short in response time, non-contact, noninterference to temperature field, long useful time and convenient operation, etc. The paper introduces the basic principle of infrared thermometer and the method of realization, puts forward infrared trermometer system with the STC89C51 MCU as the CPU. The paper introduces the composing and the method of that system in detail, and gives the hardware principle diagram and the design flow chart of the software. The system formed by the optical system, photoelectron detector,display and output partially. The optical system collects the infrared radiation energy of the object in its field of view, the infrared energy focusing on the instrument and transforms to the corresponding electrical signal. The STC89C51 MCU is used to start the temperature survey, data receive, count the value of the object temperature based on the arithmetic with in MCU and the result is displayed on LED.非接触式测温仪设计与制作
红外测温方法的工作原理及测温..
基于单片机的红外遥控小车设计
红外报警系统方案设计全解
数据结构课程设计-校园导航
单片机的红外遥控器解码设计
红外线防盗报警器课程设计报告
校园导航系统
红外测温仪开题报告
基于单片机的红外遥控系统设计
(完整版)基于单片机的红外报警器的设计
数据结构课程设计-校园导航
红外测温仪设计方案
红外遥控发射和接收系统课程设计
基于单片机的红外感应报警系统设计
《校园导航系统》课程设计报告
非接触式红外测温仪设计
相关主题
文本预览