坐标变换总结
姓名:
日期:2011.11.4
坐标变换的总结
一.由三项坐标系变换到两相旋转坐标系
1.三相到两相静止坐标系的变换首先,确定三相电压的相序:
cos()
2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-
=-
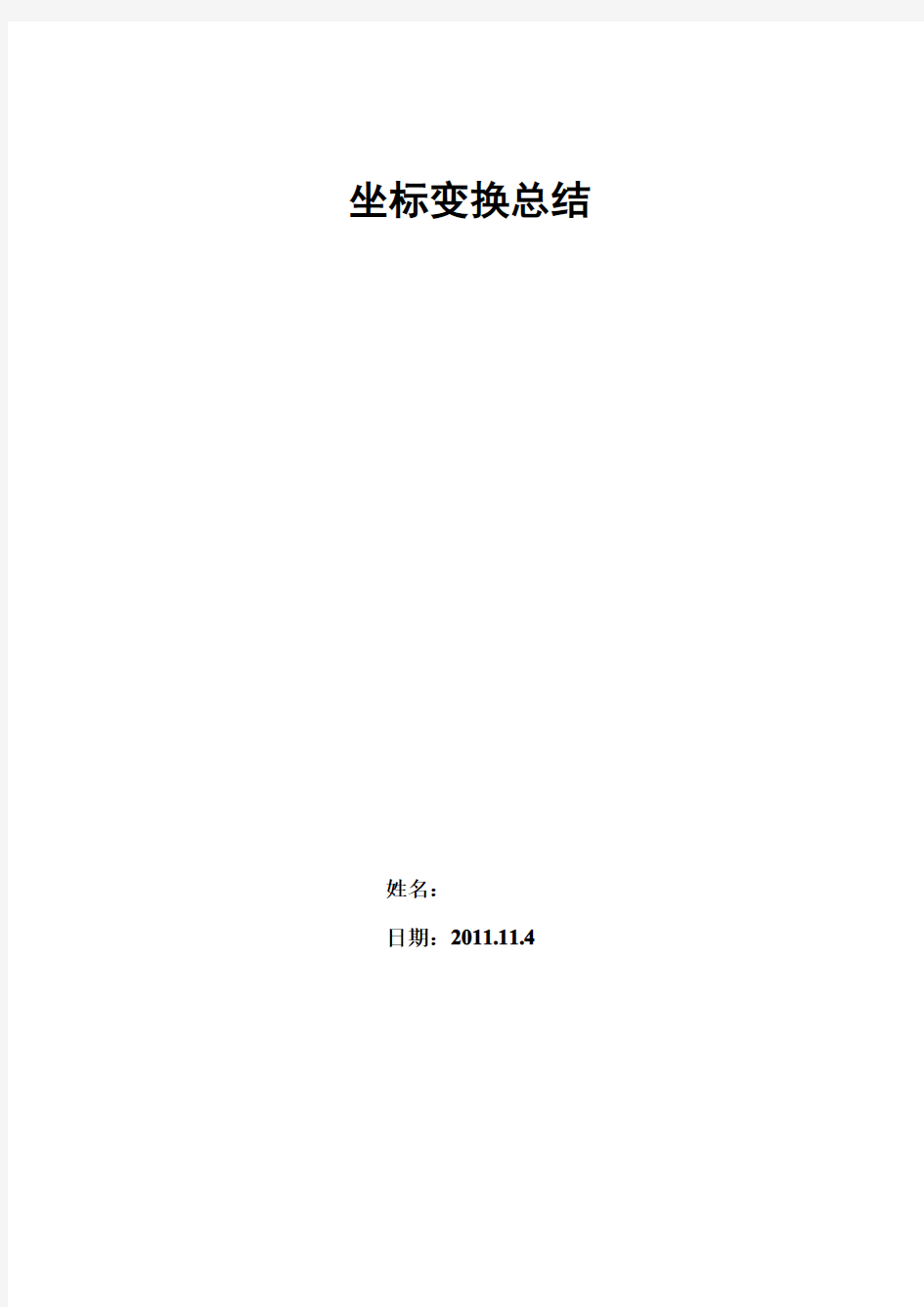
在坐标图上表示三相到两相静止坐标系上的变换,如图所示:
图13-2s 变换
由上图,我们可以将A u 、B u 、c u
转化到两相静止坐标系上,具体等式如下:
211()3222()322A B C B C u u u u u αβ?=--????=-??
插入系数2、
3是为了保证两相坐标系中合成矢量的模与各相电压的模相同。后面会推导为什么可以保证模不变。
整理成状态方程的形式,如下:
1112223022A B C u u u u u αβ????--
???????=?????????-??????2.两相静止坐标系到两相旋转坐标系的变换
我们知道,在两相静止坐标系中,合成矢量是旋转的,我们令旋转坐标系的d 轴与旋转矢量重合,则可将其转换到旋转坐标系中。坐标变换如图所示:
图22s-2r 变换
此时,我们可以得到,两相静止坐标系到两相旋转坐标系的公式,其中θ一般取为A 相的相角。
cos sin sin cos d q u u u u αβθθθθ??????=??????-????
??二.反向变换
1.若需要将旋转坐标系转化到静止坐标系上,只需相应的将d-q 向αβ-投影即
可,根据图二,我们可以得到:
cos sin sin cos d q u u u u αβθθθθ????-??=????????????
2.同理,根据图1,我们可以将αβ-分别投影到A 、B 、C 上,获得其逆变换:
102133221322A B C u u u u u αβ??????????????=-???????????????--????
三.关于乘以2/3保持模不变的问题首先,我们已经能够确定了电压相序
cos()
2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-
=-经过变换后:
211()322
A B c u u u u α=--
进而,我们可以推知:
211()322
B A
C U U U U α?
???=--22211()322211(1)32223()32A A A A A A U a U aU U a a U U ??????
=--=--==其中,a=23j e π
。
同理,我们可以求的A
q U jU ??=-即
cos()
cos(2d A m q m u u U wt u U wt π
===-合成矢量
sin t cos cos()cos()2
d q
m m t
jarc g t m U u ju U wt jU wt U e ωωπ
=+=+-=显然,此时空间相量的模和时间相量的模相等。
至于为什么要保持模不变,我没找到相关的说明,谈一下我的理解。如果只考虑坐标变换的话,那么乘不乘这个系数并没有什么实际意义,也就是说,之所以乘这个系数是为了方便后续模块的使用。在此次实验中,αβ-的输出主要是给SVPWM 使用。而6个扇区的参考量i U 的大小一般取的是直流侧电压。乘以2/3后,合成空间矢量的模就等于输出正弦信号的的模,我们知道输出正弦信号的最大值m U 必然会小于直流侧电压DC U ,这样取值后,在SVPWM 调制时带来的好处就是可以保证在任意扇区两个非零导通时间12PWM t t T +≤.我们知道,当12PWM t t T +=时合成矢量旋转形成一个圆,在该圆内,合成的输出信号为正弦信号,超出这个圆,输出为非正弦信号。也就是说,乘以系数2/3之后,可以保证合成矢量在上述的圆内,保证输出为正弦信号。
四.MATLAB 中的abc-aq 变换
首先,MATLAB 中的电压参考量取得和我们常用的不同,为正弦信号,如下所示:
sin()
2sin()34sin()3A m B m c m u U wt u U wt u U wt ππ==-
=-和我们的相位相差了90度,相应的其dq 轴的选取也和我们不同(实际上MATLAB 中的q 轴和我们的d 轴重合)。我们不关心他具体是怎么变换的,我们更关心他的输出和我们变换方式下的输出是否一致。下面是我的推导过程:1.按照我们的的变换方式,输入为余弦信号,
cos()
2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==-
=-输出为:
224cos cos()cos()333224sin sin()sin()333d A B C q A B C u u t u t u t u u t u t u t ππωωωππωωω??=
+-+-??????=-----????
在MATLAB 中,输入为正弦信号,和我们的相位相差了90度,其输出为:224sin sin()sin()333224cos cos()cos()333d A B C q A B C u u t u t u t u u t u t u t ππωωωππωωω??=+-+-????
??=
+-+-????我们知道,在两个变换中,旋转角都是取得A 相的相角,也就是说在MATLAB 的变换中,其相角相当于余弦量的相角加上90度,sin cos 2t t πωω=+,
将该式带入到MATLAB 的输出中,并化简,我们可以得到:
22224cos cos()cos()333224sin sin()sin()333d A B C q A B C u u t u t u t u u t u t u t ππωωωππωωω??=
+-+-??????=-----????这个表达式和按照我们变换方式变换获得的输出是一致的,也就是说,MATLAB 的dq 相当于将我们的dq 轴旋转了90度,但是dq 本身就是一个旋转的坐标系,因而我们可以认为,这两种方式获得的输出是完全等价的。
另外,在MATLAB 中,为了验证两种变换方式下,控制方式相同,我们可以交换dq 的控制信号,观察实际的控制效果,来证明刚才的结论是否成立。
对于基于电压矢量的控制,如果我们令Iqref=0的话,那么输出电流应该和
电网电压同相位。如果这两种变换方式不等效的话,则电流和电压不可能同相位。按照这种思想,在MATLAB中仿真,得到输出结果如图所示,此时变换输出Iq 与Iqref=0做差,做为PI控制器的输入信号。
而将dq的控制信号交换后,可得下面的输出,也就是说,此时电流和电网电压相位相差了90度。
由上两图可知,两种变换的输出是等效的。
实验四、图像的几何变换与彩色处理 一、实验目的 1理解和掌握图像的平移、垂直镜像变换、水平镜像变换、缩放和旋转的原理和应用; 2熟悉图像几何变换的MATLAB操作和基本功能 3 掌握彩色图像处理的基本技术 二、实验步骤 1 启动MATLAB程序,读入图像并对图像文件分别进行平移、垂直镜像变换、水平镜像变换、缩放和旋转操作 %%%%%%平移 >> flowerImg=imread('flower.jpg'); >> se=translate(strel(1),[100 100]); >> img2=imdilate(flowerImg,se); >> subplot(1,2,1); >> imshow(flowerImg); >> subplot(1,2,2); >> imshow(img2);
I1=imread('flower.jpg'); I1=double(I1); H=size(I1); I2(1:H(1),1:H(2),1:H(3))=I1(H(1):-1:1,1:H(2),1:H(3)); I3(1:H(1),1:H(2),1:H(3))=I1(1:H(1),H(2):-1:1,1:H(3)); Subplot(2,2,1); Imshow(uint8(I1)); Title('原图'); Subplot(2,2,2); Imshow(uint8(I3)); Title('水平镜像'); Subplot(2,2,3); Imshow(uint8(I2)); Title('垂直镜像'); img1=imread('flower.jpg'); figure,imshow(img1); %%%%%%缩放 img2=imresize(img1,0.25); figure,imshow(img2); imwrite(img2,'a2.jpg');
基于 MATLAB 的七参数法坐标系统转换问题分析 1 张鲜妮 21, ,王磊 21, 1、中国矿业大学环境与测绘学院,江苏徐州 (221008 2、江苏省资源环境信息工程重点实验室,江苏徐州 (221008 E-mail: 摘要:GPS 测量的坐标是基于 WGS-84坐标系下的,而我国实用的测量成果大多都是基于北京 54坐标系下的。随着 GPS 测量技术的广泛使用,由 WGS-84坐标向北京 54坐标系下坐标的转换问题一直是一个可探讨的问题, 坐标系统转换的现有模型很多, 但常用的还是经典的七参数转换模型。随着不断的实践研究, 发现七参数在进行坐标系统转换时有一定的局限性。本文采用 MATLAB 语言编写了七参数法坐标系统转换程序,并对七参数坐标系统转换的若干问题进行了分析讨论。分析结果表明, 小区域范围内用正常高代替大地高对坐标转换精度影响很小; 公共点分布情况对坐标转换精度影响显著; 合适的公共点密度有利于提高坐标转换精度。 关键词:七参数法;坐标系统; MATLAB ;转换问题 1. 引言 随着 GPS 空间定位技术的发展, GPS 技术以其快速、精确、全天候在测量中的应用变的越来越广泛, GPS 成为建立基础控制网的首选手段 ]1[,由于 GPS 系统采用的是 WGS-84坐标系, 是一种地心坐标系, 而我国目前常用的两个坐标系 1954年北京坐标系 (以下称 BJ54 和 1980年国家大地坐标系,是一种参心坐标系,采用克拉所夫斯基椭球为参考椭球,并采用高斯克吕格投影方式进行投影, 我国的国土测量成果和在进行工程施工时大都是基于这两个坐标系下的。所以在利用 GPS 技术进行测量过程中必然存在由 WGS-84坐标向北京 54坐标系下的转换问题。现有的转换模型已经成熟,归纳起来主要有布尔莎 -沃尔夫模型(七参数法、莫洛登斯基 -巴代卡
数字图像处理课程设计 题目图像的几何变换重建 系 (部) 信息工程系 班级 姓名 学号 指导教师 2013 年 12 月 16 日至 12 月 27 日共 2 周 2013年 12 月 27 日
数字图像处理课程设计任务书
课程设计成绩评定表
目录 1 引言 (4) 1.1课程设计的目的.......................... 错误!未定义书签。 1.2课程设计的任务.......................... 错误!未定义书签。 1.3课程设计的要求.......................... 错误!未定义书签。 1.4开发工具................................ 错误!未定义书签。2设计内容 (4) 2.1设计内容 (4) 2.2 系统框图 (4) 3 设计方案 (5) 3.1功能模块的划分 (5) 3.2算法描述 (5) 3.3实现主要功能的原理和方法 (8) 3.3.1最近邻域插值法 (8) 3.3.2双线性插值法 (8) 4功能模块的具体实现 (10) 4.1 模块功能 (10) 4.2流程图 (11) 4.3程序清单及各模块的实现效果图 (11) 4.4 系统仿真与调试 (21) 5 总结与体会 (22) 参考文献 (22) 附录 (23)
1 引言 2设计内容 2.1设计内容 我选取的是图像的几何变换,设计内容如下, (1)能够读取和存储图像。 (2)实现图像的平移、缩放、旋转几何变换。 (3)分别采用最近邻插值和双线性插值技术进行图像重建。 (4)编写代码实现上述功能。 图2-1系统框图 本次课设所做的图像几何变换包括平移变换、缩放变换和旋转变换。缩放变换和旋转变换均用双线性插值变换和最近邻插值变换两种方法来做,对图像进行处理后再存储。
坐标变换总结 姓名: 日期:2011.11.4
坐标变换的总结 一.由三项坐标系变换到两相旋转坐标系 1.三相到两相静止坐标系的变换首先,确定三相电压的相序: cos() 2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==- =- 在坐标图上表示三相到两相静止坐标系上的变换,如图所示: 图13-2s 变换 由上图,我们可以将A u 、B u 、c u 转化到两相静止坐标系上,具体等式如下: 211()3222()322A B C B C u u u u u αβ?=--????=-?? 插入系数2、 3是为了保证两相坐标系中合成矢量的模与各相电压的模相同。后面会推导为什么可以保证模不变。 整理成状态方程的形式,如下: 1112223022A B C u u u u u αβ????-- ???????=?????????-??????2.两相静止坐标系到两相旋转坐标系的变换 我们知道,在两相静止坐标系中,合成矢量是旋转的,我们令旋转坐标系的d 轴与旋转矢量重合,则可将其转换到旋转坐标系中。坐标变换如图所示:
图22s-2r 变换 此时,我们可以得到,两相静止坐标系到两相旋转坐标系的公式,其中θ一般取为A 相的相角。 cos sin sin cos d q u u u u αβθθθθ??????=??????-???? ??二.反向变换 1.若需要将旋转坐标系转化到静止坐标系上,只需相应的将d-q 向αβ-投影即 可,根据图二,我们可以得到: cos sin sin cos d q u u u u αβθθθθ????-??=???????????? 2.同理,根据图1,我们可以将αβ-分别投影到A 、B 、C 上,获得其逆变换: 102133221322A B C u u u u u αβ??????????????=-???????????????--???? 三.关于乘以2/3保持模不变的问题首先,我们已经能够确定了电压相序 cos() 2cos()34cos()3A m B m c m u U wt u U wt u U wt ππ==- =-经过变换后: 211()322 A B c u u u u α=--
Matlab数字图像处理实验指导 实验目的: 通过实验,深入理解和掌握图像处理的基本技术,提高动手实践能力。 实验环境: Matlab变成 实验一图像的几何变换 实验内容:设计一个程序,能够实现图像的各种几何变换。 实验要求:读入图像,打开图像,实现图像的平移变换、比例缩放、转置变换、镜像变换、旋转变换等操作。 实验原理: 图像几何变换又称为图像空间变换,它将一幅图像中的坐标位置映射到另一幅图像中的新坐标位置。学习几何变换的关键就是要确定这种空间映射关系,以及映射过程中的变化参数。 几何变换不改变图像的像素值,只是在图像平面上进行像素的重新安排。一个几何变换需要两部分运算:首先是空间变换所需的运算,如平移、镜像和旋转等,需要用它来表示输出图像与输入图像之间的(像素)映射关系;此外,还需要使用灰度插值算法,因为按照这种变换关系进行计算,输出图像的像素可能被映射到输入图像的非整数坐标上。 设原图像f(x0,y0)经过几何变换产生的目标图像为g(x1,y1),则该空间变换(映射)关系可表示为: x1=s(x0,y0) y1=t(x0,y0) 其中,s(x0,y0)和t(x0,y0)为由f(x0,y0)到g(x1,y1)的坐标换变换函数。 一、图像平移 图像平移就是将图像中所有的点按照指定的平移量水平或者垂直移动。
二、图像镜像 镜像变换又分为水平镜像和垂直镜像。水平镜像即将图像左半部分和右半部分以图像竖直中轴线为中心轴进行对换;而竖直镜像则是将图像上半部分和下半部分以图像水平中轴线为中心轴进行对换。 三、图像转置 图像转置是将图像像素的x坐标和y坐标呼唤。图像的大小会随之改变——高度和宽度将呼唤。
数字图像处理论文--图像的几何变换及其MATLAB实现 学院:理学院专业:信息与计算科学 班级:信计1012 姓名: 学号:任课老师: 集美大学理学院 二○一三年十一月二十八日
目录 摘要 (1) 一、何谓数字图像处理 (1) 二、数字图像几何变换简介 (1) 三、MATLAB图像处理工具介绍 (1) 四、图像几何变换的MATLAB实现 (2) 4.1图像几何变换的概述 (2) 4.2 图像的平移变换 (2) 4.3 图像的比例缩放 (4) 4.4 图像的镜像变换 (5) 4.5 图像的旋转变换 (7) 4.6 图像的剪取 (8) 五、图像几何变换的应用以及技术局限 (10) 参考文献 (10)
摘要:图像变换就是把图像从空间域转换到变换域(如频率域)的过程。图像变换可以使人们从另一角度来分析图像信号的特性,利用变换域中特有的性质,使图像处理过程更加简单、有效。图像变换是许多图像处理与分析技术的基础,而几何变换是图像变换中最基础也是应用最广泛的技术之一,本文基于MATLAB的图像处理工具,通过改变图像像素的空间位置或估算新空间位置上的像素值,从而实现图像的平移、缩放、旋转、镜像变换、图像插值等几何变换。 关键字:图像变换、几何变换、MATLAB 一、何谓数字图像处理 数字图像处理(Digital Image Processing),就是利用数字计算机或则其他数字硬件,对从图像信息转换而得到的电信号进行某些数学运算,以提高图像的实用性。例如从卫星图片中提取目标物的特征参数,三维立体断层图像的重建等。总的来说,数字图像处理包括点运算、几何处理、图像增强、图像复原、图像形态学处理、图像编码、图像重建、模式识别等。目前数字图像处理的应用越来越广泛,已经渗透到工业、医疗保健、航空航天、军事等各个领域,在国民经济中发挥越来越大的作用。 二、数字图像几何变换简介[3] 今天数字技术时代,我们身边接触到很多的数字图像,而对数字图像的处理往往会遇到需要对图像进行几何变换的一些问题。图像几何变换是图像显示技术中的一个重要组成部分。在图像几何变换中主要包括图像的缩放、旋转、移动、剪取等内容。无论照片、图画、书报、还是医学X光和卫星遥感图像等领域都会用到这些技术。通过图像的几何变换技术,可以显著提高图像处理效率和质量,为更进一步的图像处理奠定基础。 三、MATLAB图像处理工具介绍[1] MATLAB全称是Matrix Laboratory(矩阵实验室),一开始它是一种专门用于矩阵数值
第 25卷第 4期《新疆师范大学学报》 (自然科学版 V o l . 25, N o . 4 2006年12月 Journal of X injiang N o r m al U niversity D ec . 2006 (N atural Sciences Editi on 图像几何变换的理论及 M A TLAB 实现 古丽娜 1, 2, 木妮娜 3 (1. 西北师范大学教育技术与传播学院 , 甘肃兰州 730070; 2. 新疆师范大学教育科学学院 , 新疆乌鲁木齐 830054; 3. 新疆师范大学数理信息学院 , 新疆乌鲁木齐830054 α 摘要 :, 。在图像几何变换中主要包括图像的缩放、图像的旋转、、 (主要包括图像的缩放、旋转、 , A 。 关键词 :; 缩放 ; 旋转 ; 移动 ; 剪取 T P 391. 4文献标识码 : A 文章编号 : 1008296592(2006 20420024205 1引言 从 20世纪 60年代美国航空和太空总署 (N A SA 的喷气推进实验室第一次使用计算机对太空船发回的大批月球图片进行处理到信息技术不断提高的今天 , 数字图像的应用处理技术得到了广泛的应用 , 形成了自己的技术特色和完善的学科体系。 我们在处理图像时往往会遇到需要对图像进行几何变换的一些问题。图像几何变换是图像显示技术中的一个重要组成部分 , 也是我们学习和探讨的一个重要课题。在图像几何变换中主要包括图像的缩放、旋转、移动、剪取等内容。其中使用最频繁的是图像的缩放和旋转 , 不论照片、图画、书报、还是医学 X 光和卫星遥感图像都会用到这两项技术。
一.图像几何变化 (1)放大,缩小,旋转 程序: I=imread('111.jpg'); J=imresize(I,1.5); L=imresize(I,0.75); K=imrotate(I,35,'bilinear'); subplot(221),subimage(I); title('原图像'); subplot(222),subimage(J); title('放大后图像'); subplot(223),subimage(L); title('缩小后图像'); subplot(224),subimage(K);title('旋转后图像'); 二.图像频域变换 (1)傅里叶变换 真彩图像灰度图像傅里叶变换谱程序:I=imread('111.jpg'); figure(1); imshow(I); B=rgb2gray(I); figure(2);
imshow(B) D=fftshift(fft2(B)); figure(3); imshow(log(abs(D)),[ ]); (2)离散余弦变换 真彩图灰度图进行离散余弦变换后程序: RGB=imread('111.jpg'); figure(1); imshow(RGB); G=rgb2gray(RGB); figure(2); imshow(G); DCT=dct2(G); figure(3); imshow(log(abs(DCT)),[]); 三.图像增强: (1)指数变换 程序:
f=imread('111.jpg') f=double(f); g=(2^2*(f-1))-1; f=uint8(f); g=uint8(g); subplot(1,2,1),subimage(f); subplot(1,2,2),subimage(g); (2)直方图均衡 程序: I=imread('111.jpg'); I=rgb2gray(I); figure subplot(221);imshow(I); subplot(222);imhist(I) I1=histeq(I); figure; subplot(221);imshow(I1) subplot(222);imhist(I1) (3)空域滤波增强 锐化滤波(Roberts算子Sobel算子拉普拉斯算子)
测量程序设计实验报告 实验名称:坐标正反算
实验三坐标正反算 一、实验目的 编写坐标正反算程序,并对格式化文件数据进行计算,验证程序。 二、实验内容 1、编写坐标正算程序 1)建立以xy_direct命名的函数,函数输入输出格式为 [x2,y2] = xy_direct(x1,y1,distance, azimuth) 度转度分秒: >> function dms= degree2dms(jiaodu) >>degree = fix(jiaodu); >>mimute = fix((jiaodu-degree)*60); >>second = ((jiaodu-degree)*60-mimute)*60; >>dms = degree+mimute/100+second/10000; 度分秒转度: >> function degree = dms2degree(jiaodu) >>degree = fix(jiaodu); >> mimute = fix((jiaodu-degree)*100); >>second = (jiaodu-degree-mimute/100)*10000; >>degree = degree+mimute/60+second/3600; 弧度转度: >> function dms=rad2dms(rad) >> rad=abs(rad); >>jiaodu=rad*180.0/pi; >> % l=fix(a) >> % b=(a-l)*60.0 >> % m=fix(b) >> % a=l+m/100.0+(b-m)*0.006
Matlab_Simulink 中Clark 变换和Park 变换的深度总结 最近搞三相并网逆变系统,对这个坐标变换产生了很多疑惑。调模型,排错,最后发现坐标变换这个地方出来的波形总是和我设想的不一样。以前认为坐标变换都是死的,带公式即可,经过这几天的研究,发现这里面真的有些方法。基于MATLAB/Simulink 中的模块,我也发现了Simulink 中和一些书上不一样的地方。而且现在这个坐标变换每本书上的表示方法都不一样,甚至字母都有好多种。下面我想基于MATLAB/Simulink 深刻的总结一下三相交流控制系统常用的两个变换Clark (3-2)变换和Park (2-2)变换。 首先来搞清楚为什么要用这两个变换,在三相交流系统中,常用的控制器还是经典的PI 调节器。PI 调节器可以对直流量进行无净差的调节,而交流量就不行,所以需要将三相交流分量转化为两项直流分量加以控制。 接下来看看Clark 变换(3-2)原理。由于三相分量幅值相等,相位相差120,角速度相等,因此三相分量存在信息冗余,这时,可以去掉一项将其化为两相,这就是Clark 变换的作用。由于两项分量所在的坐标轴是静止的,所以我们把此坐标轴称为两相静止坐标系。也就是说平面上的原来基于三相静止坐标系的矢量,可以切换到两相静止坐标系表示。变换的原则是投影原则+等幅值等效原则(DPC 时用功率等效原则)。 令A 与alfa 轴重合,按照变换原则,计算投影ABC 分量在alfa 、beta 上的投影,按照 等复制变换原则导出变换矩阵方程如下。 11122230A B C αβ????-- ????? =???? ???? ??? Simulink 中的3/2变换也是基于此变换进行的。但是,在电气工程中为大家熟知的三相正序的相序是,A 为0,B 为-120,C 为120(也可以是-240).如果按照图中所标注的方向进行坐标变换,那一定要将相序变为负序,也就是说A 为0,B 为120,C 为-120. 如果坚持用传统正序,那么再按上式变换之后的坐标进行变换的话,beta 轴就反向了。也就是说,采用A 为0,B 为-120,C 为120的相序,利用上面的变换方程进行变换的结果是,beta 滞后alfa 90°.
图像几何变换 一、实验目的 (1)学习几种常见的图像几何变换,并通过实验体会几何变换的效果; (2)掌握图像平移、剪切、缩放、旋转、镜像、错切等几何变换的算法原理及编 程实现 (3)掌握matlab编程环境中基本的图像处理函数 (4)掌握图像的复合变换 二、涉及知识点 (1)图像几何变换不改变图像像素的值,只改变像素所在的几何位置 (2)图像裁剪imcrop函数,语法格式为: B=imcrop(A);交互式用鼠标选取区域进行剪切 B=imcrop(A,[left top right bottom]);针对指定的区域[left top right bottom]进行剪切 (3)图像缩放imresize函数,语法格式为: B = imresize(A,m,method) 这里参数method用于指定插值的方法,可选用的值为'nearest'(最邻近法),'bilinear'(双线性插值),'bicubic'(双三次插值),默认为'nearest'。 B = imresize(A,m,method)返回原图A的m倍放大的图像(m小于1时效果是 缩小)。 (4)图像旋转imrotate函数,语法格式为: B = imrot ate(A,angle,’crop’),参数crop用于指定裁剪旋转后超出图像的部分。 三、实验内容 (1)将图像hehua.bmp裁剪成200X200大小,并保存 (2)制作动画,将一幅图像逐渐向左上角平移移出图像区域,空白的地方用白色 填充 (3)利用剪切图像函数制作动画 (4)将图像分别放大1.5倍和缩小0.8倍,插值方法使用最近邻域法和双线性插 值法,对比显示图像。 (5)将图像水平镜像,再顺时针旋转45度,显示旋转后的图像。 (6)将图像分别进行水平方向30度错切,垂直方向45度错切,分别显示结果 具体实现: 1.将图像hehua.bmp裁剪成200X200大小,并保存 I=imread('hehua.bmp'); n=size(I); figure; subplot(1,2,1); imshow(I); title('原图'); I=double(I);
测量程序设计 实验报告 实验名称:大地坐标与空间直角坐标的 换算
实验四 大地坐标与空间直角坐标的换算 一、实验目的 编写大地坐标与空间直角坐标相互转换的程序,并对格式化文件数据进 行计算,验证程序。 二、实验内容: 1、大地坐标向空间直角坐标换算 转换公式: B h e N z L B h N y L B h N x sin ])1([sin cos )(cos cos )(2+-=+=+= (1) 其中:L 为经度,B 为纬度,h 为大地高,B e a N 22sin 1-=为卯酉圈曲率半径, a b a e 2 2-=为第一偏心率,a 为旋转椭球长半轴,b 为短半轴。 WGS84椭球参数:长半轴 a = 6378137 扁率 f = 1/298.257223563 根据上式创建以geo 2xyz 命名的函数,函数输入输出格式为 [x, y, z] = geo 2xyz (L, B, h) 2、空间直角坐标向大地坐标换算 根据式(1)推导大地坐标向空间直角坐标转换公式: N B y x h y x B Ne z B x y L -+=++==cos )sin arctan() /arctan(2 2222 注意计算纬度时需要用到迭代,可用)arctan(22y x b az B +=作为初始值。 创建以xyz2geo 命名的函数,函数输入输出格式为 [L, B, h] = xyz 2geo (x, y, z)
三、实验步骤 1、大地坐标向空间直角坐标换算 主程序: %%大地坐标向空间直角坐标换算 %函数的输入输出格式为[x,y,z]=geo2xyz(L,B,h) [filename,pathname] = uigetfile('*.txt','请选择打开的数据文件'); file = [pathname, filename]; data = importdata(file); L=data.data(:,1); B=data.data(:,2); h=data.data(:,3); [x,y,z]=geo2xyz(L,B,h); A=[x,y,z]; A=A'; [filename_out,pathname_out] = uiputfile('*.txt','请选择要输出数据文件'); fileout = [pathname_out, filename_out]; fid = fopen(fileout,'wt'); fprintf(fid,' x y z\n'); fprintf(fid,'%15.7f %15.7f %15.7f\n',A); close('all'); 函数: function [x,y,z]=geo2xyz(L,B,h) %大地坐标经纬度转换成空间直角坐标 B=dms2rad(B); L=dms2rad(L); a=6378137; %a是长半轴 f=1/298.257223563; %f是扁率 b=a-a*f; e=sqrt(a^2-b^2)/a; N=a./(sqrt(1-e^2.*(sin(B)).^2)); %N为卯酉圈半径率,e为第一偏心率 x=(N+h).*cos(B).*cos(L); y=(N+h).*cos(B).*sin(L); z=(N*(1-e^2)+h).*sin(B); end function rad=dms2rad(jiaodu) %度分秒->弧度(rad) degree = fix(jiaodu); mimute = fix((jiaodu-degree)*100);
实验四:图像几何变换(编程报告) 一、实验目的 (1)学习几种常见的图像几何变换,并通过实验体会几何变换的效果; (2)掌握图像平移、剪切、缩放、旋转、镜像、错切等几何变换的算法原理及编 程实现 (3)掌握matlab编程环境中基本的图像处理函数 (4)掌握图像的复合变换 二、涉及知识点 (1)图像几何变换不改变图像像素的值,只改变像素所在的几何位置 (2)图像裁剪imcrop函数,语法格式为: B=imcrop(A);交互式用鼠标选取区域进行剪切 B=imcrop(A,[left top right bottom]);针对指定的区域[left top right bottom]进行剪切 (3)图像缩放imresize函数,语法格式为: B = imresize(A,m,method) 这里参数method用于指定插值的方法,可选用的值为'nearest'(最邻近法),'bilinear'(双线性插值),'bicubic'(双三次插值),默认为'nearest'。 B = imresize(A,m,method)返回原图A的m倍放大的图像(m小于1时效果是 缩小)。 (4)图像旋转imrotate函数,语法格式为: B = imrotate(A,angle,’crop’),参数crop用于指定裁剪旋转后超出图像的部分。 三、实验内容 (1)将图像hehua.bmp裁剪成200X200大小 (2)制作动画,将一幅图像逐渐向左上角平移移出图像区域,空白的地方用白色 填充 (3)利用剪切图像函数制作动画 (4)将图像分别放大1.5倍和缩小0.8倍,插值方法使用双线性插值法,分别显 示图像。 (5)将图像水平镜像,再顺时针旋转45度,显示旋转后的图像。 (6)将图像分别进行水平方向30度错切,垂直方向45度错切,分别显示结果 四、实验环境 Windows下matlab编程环境 五、实验源代码及结果 1.f=imread('hehua.bmp'); figure; imshow(f); title('原图'); f2=imcrop(f,[50,50,250,250]); figure; imshow(uint8(f2)); title('裁剪后'); imwrite(f2,'d:/5/hehua1.bmp');
%北京54转换为WGS84坐标(GPS) %X=3459174.0300 Y=36503163.4500 X=3459181.0255; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%输入X值 Y=36503206.2860; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%输入X值 x=X; y=Y-fix(Y/1000000)*1000000-500000; b=x*3600*180/pi/6367558.4969; T=(cos(b*pi/180/3600))^2; Bf=b+(50221746+(293622+(2350+22*T)*T)*T)*sin(b*pi/180/3600)*cos(b*pi/180/3600)*3600* 180/pi/10^10; Q=(cos(Bf*pi/180/3600))^2; Nf=6399698.902-[21562.267-(108.973-0.612*Q)*Q]*Q; Z=y/(Nf*cos(Bf*pi/180/3600)); b2=(0.5+0.003369*Q)*sin(Bf*pi/180/3600)*cos(Bf*pi/180/3600); b3=0.333333-(0.166667-0.001123*Q)*Q; b4=0.25+(0.16161+0.00562*Q)*Q; b5=0.2-(0.1667-0.0088*Q)*Q; B=Bf-[1-(b4-0.12*Z^2)*Z^2]*Z^2*b2*180*3600/pi; L=[1-(b3-b5*Z^2)*Z^2]*Z*180*3600/pi; B1=fix(B/3600); B2=fix((B-B1*3600)/60); B3=B-B1*3600-B2*60; L1=fix(L/3600); L2=fix((L-L1*3600)/60); L3=L-L1*3600-L2*60; L4=fix(Y/1000000)*3+L1; fprintf('\n\n') fprintf('p点的WGS84坐标:%f\t%f\t%f\t\n',B1,B2,B3) fprintf('p点的WGS84坐标:%f\t%f\t%f\t\n',L4,L2,L3)
图像的变换 1. 离散傅立叶变换的Matlab 实现 Matlab 函数fft、fft2 和fftn 分别可以实现一维、二维和N 维DFT 算法;而函数ifft、ifft2 和ifftn 则用来计算反DFT 。 这些函数的调用格式如下: A=fft(X,N,DIM) 其中,X 表示输入图像;N 表示采样间隔点,如果X 小于该数值,那么Matlab 将会对X 进行零填充,否则将进行截取,使之长度为 N ;DIM 表示要进行离散傅立叶变换。 A=fft2(X,MROWS,NCOLS) 其中,MROWS 和NCOLS 指定对X 进行零填充后的X 大小。 A=fftn(X,SIZE) 其中,SIZE 是一个向量,它们每一个元素都将指定X 相应维进行零填充后的长度。 函数ifft、ifft2 和ifftn的调用格式于对应的离散傅立叶变换函数一致。 例子:图像的二维傅立叶频谱 % 读入原始图像 I=imread('lena.bmp'); imshow(I) % 求离散傅立叶频谱 J=fftshift(fft2(I)); figure; imshow(log(abs(J)),[8,10]) 2. 离散余弦变换的Matlab 实现 2.1. dCT2 函数 功能:二维DCT 变换 格式:B=dct2(A) B=dct2(A,m,n) B=dct2(A,[m,n]) 说明:B=dct2(A) 计算 A 的DCT 变换 B ,A 与 B 的大小相同;B=dct2(A,m,n) 和B=dct2(A,[m,n]) 通过对A 补0 或剪裁,使B 的大小为m×n。 2.2. dict2 函数 功能:DCT 反变换 格式:B=idct2(A) B=idct2(A,m,n) B=idct2(A,[m,n]) 说明:B=idct2(A) 计算 A 的DCT 反变换B ,A 与 B 的大小相同;B=idct2(A,m,n) 和B=idct2(A,[m,n]) 通过对A 补0 或剪裁,使B的大小为m×n。
******************* 实践教案 ******************* 兰州理工大学 计算机与通信学院 计算机图象处理课程设计 题目:图像几何变换程序设计
目录 摘要 (1) 一、前言 (2) 二、算法分析与描述 (2) 三、详细设计过程 (4) 四、调试过程中出现地问题及相应解决办法 (8) 五、程序运行截图及其说明 (9) 六、简单操作手册 (13) 设计总结 (14) 参考文献 (14) 致谢 (15) 附录 (15) 摘要 本次课程设计我地题目是图像几何变换和图像分割程序设计,计算机图像处理地实现主要以数学模型为基础,通过建立合适地算法来实现具体地图像处理,几何变换是最常见地图像处理手段,通过对变形地图像进行几何校正,可以得出准确地图像.常用地几何变换功能包括图像地平移、图像地旋转、图像地缩放、图像地错切等.作为数字图像处理地一个重要部分,一般用MATLAB编程工具设计一个完整地应用程序,实现相应地图像几何变换功能.
图像分割是一种非常重要地图像处理技术,它不仅得到了广泛地重视和研究,也在实际中得到了大量地应用.本文主要介绍了计算机图像处理中地图像分割程序地设计与实现. 关键词:图像几何变换、平移、旋转、放大缩小 一、前言 图形图像处理地应用领域涉及人类生活和工作地各个方面,它是从60年代以来随计算机地技术和VLSI地发展而产生、发展和不断成熟起来地一个新技术领域,理论上和实际应用上都并取得了巨大地成就.数字图像处理与模拟图像处理地根本不同在于,它不会因图像地存储、传输或复制等一系列变换操作而导致图像质量地退化,所以图形图像地处理在我们地生活中又很重要地作用. 在对图像地研究和应用中,人们往往只对图像中地某些部分感兴趣.这些部分通常称为目标或前景,它们一般对应图像中特定地、具体独特性质地区域.为了辨识和分析目标,需要将它们分别提取出来,在此基础上才有可能对目标进一步利用.. 二、算法分析与描述 2.1图像几何变换 2.1.1图像地平移变换 图像地平移变换就是将图像中地像素点按照要求地量进行垂直、水平移动.图像地水平处理,只是改变了原有景物在画面上地位置,而图像地内容不发生变化. 初始坐标为(x0,y0)地点经过平移(tx,ty)(以向右,向下为正方向)后,坐标变为(x1,y1).这两点之间地关系是: x1=x0+tx y1=y0+ty 使用矩阵地形式来表达如下:
通信专业课程设计二(论文)
目录 第1章前言............................................................. - 1 - 1.1数字图像概述 . (1) 1.2数字图像几何变换介绍 (2) 第2章图像几何变换理论......................................... - 3 -2.1图像缩放原理...................................................... - 3 - 2.2图像旋转原理...................................................... - 4 - 2.3图像剪取原理...................................................... - 6 - 第3章数字图像几何变换实现............................................. - 7 - 3.1数字图像缩放 . (7) 3.1.1 IMRESIZE函数..................................... 错误!未定义书签。 3.1.2数字图象缩放................................................... - 7 - 3.2数字图像旋转 (10) 3.2.1 IMROTATE函数..................................... 错误!未定义书签。 3.2.2数字图象旋转.................................................. - 10 - 3.3数字图像剪取 (12) 3.3.1IMCOPY函数 (12) 3.3.2数字图象剪取.................................................. - 12 - 第4章结论............................................................ - 15 - 参考文献............................................................... - 16 - 附录................................................................... - 17 -
湖南商学院 课程设计 课程名称图形图像处理 题目图像的几何变换 系部数学与统计学院 专业信息与计算科学 班级信息与计算科学1301 学号 学生姓名 任课教师王勇 2016年月日
目录 第一章绪论 §1 非彩色图像在Matlab中的矩阵 (3) §2 彩色图像在Matlab中的矩阵 (4) 第二章图像的镜像变换 §1 图像的水平方向镜像 (5) §2 图像的垂直方向镜像 (8) 第三章图像的旋转变换 §1 图像的旋转变换 (10) 第四章图像的转置变换 §1 非彩色图像的转置变换 (13) §3 彩色图像的转职变换 (13) 第五章图像的缩放变换 §1 双线性内插法简介 (15) §2 图像的缩放 (16) 第六章图像的平移变换 §1 图像的平移变换 (19)
第一章 绪论 §1 非彩色图像在Matlab 中的矩阵 非彩色图像可以定义为一个二维函数(,)f x y ,其中x 和y 是Euclid 空间(平面)坐标,任意一个二元组(,)x y 处的值f 称为该点处的强度或者灰度。当x ,y 和灰度值f 是离散的数值时,我们称改图像为数字图像。 每一个非彩色图像在Matlab 中都是一个二维矩阵n m A ?,而我们知道变换是指集合自身到自身的映射,所以对非彩色图像的变换其实质就是对二维矩阵n m A ?进行变换得到另一个二维矩阵n m B ?的过程。例如图像1.1 图1.1 其在Matlab 中的表示: >> A=imread('Fig3.24.jpg'); >> size(A) ans = 298 252 %A 是一个298行252列的矩阵。
空间直角坐标XYZ换算为经纬度BL程序 (matlab编程) 度分秒转弧度函数代码: function hd=dzh(a) hh=sign(a); a=abs(a); hd=hh*(fix(a)+fix((a-fix(a))*100)/60+((a-fix(a))*100-... fix((a-fix(a))*100))*100/3600)*pi/180;%度分秒转化为弧度 end 弧度转度分秒函数代码: function jd=hzd(x) jd=fix(x*206264.8062470964/3600)+fix((x*206264.8062470964/3600-... fix(x*206264.8062470964/3600))*60)/100+((x*206264.8062470964/3600-... fix(x*206264.8062470964/3600))*60-fix((x*206264.8062470964/3600-... fix(x*206264.8062470964/3600))*60))*60/10000;%弧度转化为度分秒 end 主程序代码: fprintf('-----克拉索夫斯基椭球体请输入1;1975年国际椭球体请输入2;WGS 84椭球请输入3-----') kk=input('请输入:'); if kk==1 a=6378245;%长半轴克拉索夫斯基椭球体 b=6356863.019;%短半轴 elseif kk==2 a=6378140; %长半轴 1975年国际椭球体 b=6356755.288; %短半轴 else a=6378137;%长半轴 1975年国际椭球体 b=6356752.314; %短半轴 end e1=sqrt(a^2-b^2)/a; %第一偏心率 c=a^2/b; X=input('请输入X:'); Y=input('请输入Y:');
function y=ff(x1,x2) %y=10*(x1+x2-5)^2+(x1-x2)^2; y=x1^2+x2^2-x1*x2-10*x1-4*x2+60; function alpha=goldmethod2(x01,x02,d,h0) % 输入分割比gama gama=0.618; % 确定搜索区间[a,b] [a,b]=search2(x01,x02,d,h0); %计算a1,a2和函数值y1,y2, 确定最优步长alpha a1=b-gama*(b-a);y1=ff(x01+d(1)*a1,x02+d(2)*a1); a2=a+gama*(b-a);y2=ff(x01+d(1)*a2,x02+d(2)*a2); for n=1:100 if y1>=y2 x1(n)=a1;x2(n)=a2;yp1(n)=y1;yp2(n)=y2; a=a1;a1=a2;y1=y2; a2=a+gama*(b-a);y2=ff(x01+d(1)*a2,x02+d(2)*a2); else x1(n)=a1;x2(n)=a2;yp1(n)=y1;yp2(n)=y2; b=a2;a2=a1;y2=y1; a1=b-gama*(b-a);y1=ff(x01+d(1)*a1,x02+d(2)*a1); end aa(n)=(a+b)/2; %输出极值点 y(n)=ff(x01+d(1)*aa(n),x02+d(2)*aa(n)); %输出极值点函数值e(n)=abs(b-a); alpha=(a+b)/2; if abs(b-a)<1e-5 break; end end
clear; h0=0.1; x0=[0,0]; e=[1,0;0,1]; xp=[0,0]; for k=1:20 k for i=1:2 i x01=x0(1);x02=x0(2);d=e(i,:); alpha=goldmethod2(x01,x02,d,h0); % 确定最优步长alpha alpha x1=x0+alpha*d; x0=x1; xp end xn=x1; if abs(xn-xp)<1e-1 break; end xp=xn; end clear; % 给定初始值 h0=0.1; x0=[0,0]; e=[1,0;0,1]; n=2; for k=1:20 k % k 代表第轮计算 % 111111111111111111 第1 到n 次搜索计算111111111111111111 for i=1:1 % 第1次搜索