直流电机单闭环调速仿真
1252836杨云霄
2015/5/27
1.仿真所得图像
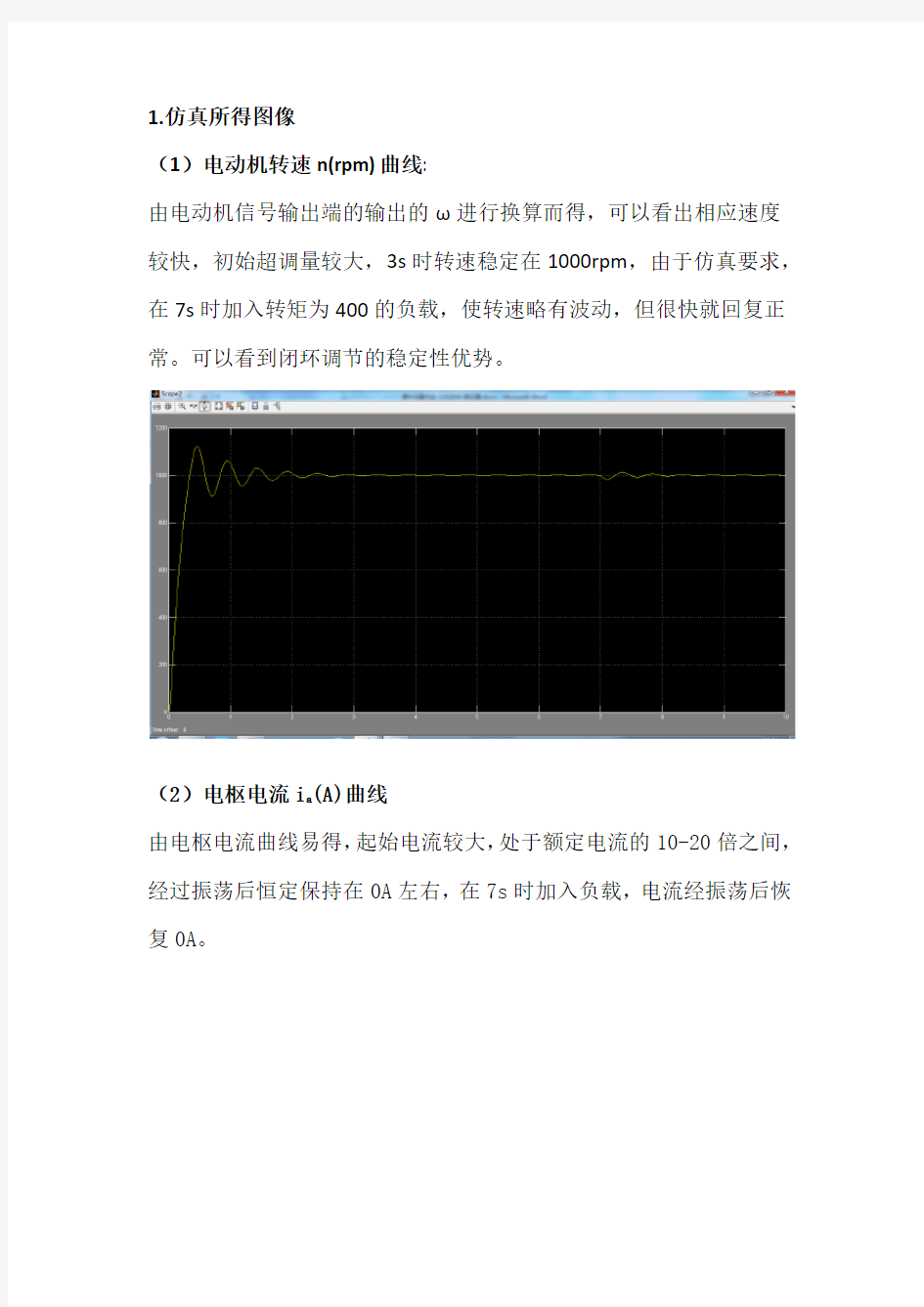
(1)电动机转速n(rpm)曲线:
由电动机信号输出端的输出的ω进行换算而得,可以看出相应速度较快,初始超调量较大,3s时转速稳定在1000rpm,由于仿真要求,在7s时加入转矩为400的负载,使转速略有波动,但很快就回复正常。可以看到闭环调节的稳定性优势。
(2)电枢电流i a(A)曲线
由电枢电流曲线易得,起始电流较大,处于额定电流的10-20倍之间,经过振荡后恒定保持在0A左右,在7s时加入负载,电流经振荡后恢复0A。
(3)励磁电流i f(A)曲线
根据所给参数励磁电压为240V励磁电阻为120Ω,故励磁电流恒定为2A。
(4)控制电压U c(V)
控制电压是经过ASR比例积分调节后所输出的电压,在本次仿真中,主要是为得到PWM发生器的占空比。
实验七 基于Simulink 的简单电力系统仿真实验 一. 实验目的 1) 熟悉Simulink 的工作环境及SimPowerSystems 功能模块库; 2) 掌握Simulink 的的powergui 模块的应用; 3) 掌握发电机的工作原理及稳态电力系统的计算方法; 4)掌握开关电源的工作原理及其工作特点; 5)掌握PID 控制对系统输出特性的影响。 二.实验内容与要求 单机无穷大电力系统如图7-1所示。平衡节点电压0 44030 V V =∠? 。负荷功率10L P kW =。线路参数:电阻1l R =Ω;电感0.01l L H =。发电机额定参数:额定功率100n P kW =;额定电压440 3 n V V =;额定励磁电流 70 fn i A =;额定频率50n f Hz =。发电机定子侧参数:0.26s R =Ω, 1 1.14 L mH =,13.7 md L mH =,11 mq L mH =。发电机转子侧参数:0.13f R =Ω,1 2.1 fd L mH =。发电机阻尼绕组参数:0.0224kd R =Ω, 1 1.4 kd L mH =,10.02kq R =Ω,11 1 kq L mH =。发电机转动惯量和极对数分别 为224.9 J kgm =和2p =。发电机输出功率050 e P kW =时,系统运行达到稳态状态。在发电机输出电磁功率分别为170 e P kW =和2100 e P kW =时,分析发电机、平衡节点电源和负载的电流、电磁功率变化曲线,以及发电机转速和功率角的变化曲线。
G 发电机节点 V 负 荷 l R l L L P 图 7.1 单机无穷大系统结构图 输电线路 三.实验步骤 1. 建立系统仿真模型 同步电机模块有2个输入端子、1个输出端子和3个电气连接端子。模块的第1个输入端子(Pm)为电机的机械功率。当机械功率为正时,表示同步电机运行方式为发电机模式;当机械功率为负时,表示同步电机运行方式为电动机模式。在发电机模式下,输入可以是一个正的常数,也可以是一个函数或者是原动机模块的输出;在电动机模式下,输入通常是一个负的常数或者是函数。模块的第2个输入端子(Vf)是励磁电压,在发电机模式下可以由励磁模块提供,在电动机模式下为一个常数。 在Simulink仿真环境中打开Simulink库,找出相应的单元部件模型,构造仿真模型,三相电压源幅值为4403,频率为50Hz。按图连接好线路,设置参数,建立其仿真模型,仿真时间为5s,仿真方法为ode23tb,并对各个单元部件模型的参数进行修改,如图所示。
Matlab通信原理仿真 学号: 2142402 姓名:圣斌
实验一Matlab 基本语法与信号系统分析 一、实验目的: 1、掌握MATLAB的基本绘图方法; 2、实现绘制复指数信号的时域波形。 二、实验设备与软件环境: 1、实验设备:计算机 2、软件环境:MATLAB R2009a 三、实验内容: 1、MATLAB为用户提供了结果可视化功能,只要在命令行窗口输入相应的命令,结果就会用图形直接表示出来。 MATLAB程序如下: x = -pi::pi; y1 = sin(x); y2 = cos(x); %准备绘图数据 figure(1); %打开图形窗口 subplot(2,1,1); %确定第一幅图绘图窗口 plot(x,y1); %以x,y1绘图 title('plot(x,y1)'); %为第一幅图取名为’plot(x,y1)’ grid on; %为第一幅图绘制网格线 subplot(2,1,2) %确定第二幅图绘图窗口 plot(x,y2); %以x,y2绘图 xlabel('time'),ylabel('y') %第二幅图横坐标为’time’,纵坐标为’y’运行结果如下图: 2、上例中的图形使用的是默认的颜色和线型,MATLAB中提供了多种颜色和线型,并且可以绘制出脉冲图、误差条形图等多种形式图: MATLAB程序如下: x=-pi:.1:pi; y1=sin (x); y2=cos (x); figure (1); %subplot (2,1,1); plot (x,y1); title ('plot (x,y1)'); grid on %subplot (2,1,2); plot (x,y2);
MATLAB/Simulink 电力系统建模与仿真 实验报告 姓名:****** 专业:电气工程及其自动化 班级:******************* 学号:*******************
实验一无穷大功率电源供电系统三相短路仿真 1.1 无穷大功率电源供电系统仿真模型构建 运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块: (1)无穷大功率电源模块(Three-phase source) (2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load) (3)三相串联RLC支路模块(Three-Phase Series RLC Branch) (4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings)) (5)三相电压电流测量模块(Three-Phase V-I Measurement) (6)三相故障设置模块(Three-Phase Fault) (7)示波器模块(Scope) (8)电力系统图形用户界面(Powergui) 按电路原理图连接线路得到仿真图如下: 1.2 无穷大功率电源供电系统仿真参数设置 1.2.1 电源模块 设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:
1.2.2 变压器模块 变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图: 1.2.3 输电线路模块 根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图: 1.2.4 三相电压电流测量模块 此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:
实验一 MATLAB 及仿真实验(控制系统的时域分析) 一、实验目的 学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点 1、 系统的典型响应有哪些? 2、 如何判断系统稳定性? 3、 系统的动态性能指标有哪些? 三、实验方法 (一) 四种典型响应 1、 阶跃响应: 阶跃响应常用格式: 1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。 2、),(Tn sys step ;表示时间范围0---Tn 。 3、),(T sys step ;表示时间范围向量T 指定。 4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。 2、 脉冲响应: 脉冲函数在数学上的精确定义:0 ,0)(1)(0 ?==?∞ t x f dx x f 其拉氏变换为:) ()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。 脉冲响应函数常用格式: ① )(sys impulse ; ② ); ,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y = (二) 分析系统稳定性 有以下三种方法: 1、 利用pzmap 绘制连续系统的零极点图; 2、 利用tf2zp 求出系统零极点; 3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析 Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.
综合设计报告 单位:自动化学院 学生姓名: 专业:测控技术与仪器 班级:0820801 学号: 指导老师: 成绩: 设计时间:2011 年12 月 重庆邮电大学自动化学院制
一、题目 直流电机调速与控制系统设计。 二、技术要求 设计直流电机调速与控制系统,要求如下: 1、学习直流电机调速与控制的基本原理; 2、了解直流电机速度脉冲检测原理; 3、利用51单片机和合适的电机驱动芯片设计控制器及速度检测电路; 4、使用C语言编写控制程序,通过实时串口能够完成和上位机的通信; 5、选择合适控制平台,绘制系统的组建结构图,给出完整的设计流程图。 6、要求电机能实现正反转控制; 7、系统具有实时显示电机速度功能; 8、电机的设定速度由电位器输入; 9、电机的速度调节误差应在允许的误差范围内。 三、给定条件 1、《直流电机驱动原理》,《单片机原理及接口技术》等参考资料; 2、电阻、电容等各种分离元件、IC、直流电机、电源等; 3、STC12C5A60S2单片机、LM298以及PC机; 四、设计 1. 确定总体方案; 2. 画出系统结构图; 3. 选择以电机控制芯片和单片机及速度检测电路,设计硬件电路; 4. 设计串口及通信程序,完成和上位机的通信; 5. 画出程序流程图并编写调试代码,完成报告;
直流电机调速与控制 摘要:当今社会,电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。无论是在工农业生产,交通运输,国防,航空航天,医疗卫生,商务和办公设备中,还是在日常生活的家用电器和消费电子产品(如电冰箱,空调,DVD等)中,都大量使用着各种各样的电动机。据资料显示,在所有动力资源中,百分之九十以上来自电动机。同样,我国生产的电能中有百分之六十是用于电动机的。电动机与人的生活息息相关,密不可分。电气时代,电动机的调速控制一般采用模拟法、PID控制等,对电动机的简单控制应用比较多。简单控制是指对电动机进行启动,制动,正反转控制和顺序控制。这类控制可通过继电器,光耦、可编程控制器和开关元件来实现。还有一类控制叫复杂控制,是指对电动机的转速,转角,转矩,电压,电流,功率等物理量进行控制。 本电机控制系统基于51内核的单片机设计,采用LM298直流电机驱动器,利用PWM 脉宽调制控制电机,并通过光耦管测速,经单片机I/O口定时采样,最后通过闭环反馈控制系统实现电机转速的精确控制,其中电机的设定速度由电位器经A/D通过输入,系统的状显示与控制由上位机实现。经过设计和调试,本控制系统能实现电机转速较小误差的控制,系统具有上位机显示转速和控制电机开启、停止和正反转等功能。具有一定的实际应用意义。关键字:直流电机、反馈控制、51内核、PWM脉宽调制、LM298 一、系统原理及功能概述 1、系统设计原理 本电机控制系统采用基于51内核的单片机设计,主要用于电机的测速与转速控制,硬件方面设计有可调电源模块,串口电路模块、电机测速模块、速度脉冲信号调理电路模块、直流电机驱动模块等电路;软件方面采用基于C语言的编程语言,能实现系统与上位机的通信,并实时显示电机的转速和控制电机的运行状态,如开启、停止、正反转等。 单片机选用了51升级系列的STC12c5a60s2作为主控制器,该芯片完全兼容之前较低版本的所有51指令,同时它还自带2路PWM控制器、2个定时器、2个串行口支持独立的波特率发生器、3路可编程时钟输出、8路10位AD转换器、一个SPI接口等,
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊ 目录 1 绪论 (1) 1.1课题研究背景 (1) 1.2研究双闭环直流调速系统的目的和意义 (1) 2 直流电机双闭环调速系统 (3) 2.1直流电动机的起动与调速 (3) 2.2直流调速系统的性能指标 (3) 2.2.1静态性能指标 (3) 2.2.2动态的性能指标 (4) 2.3双闭环直流调速系统的组成 (6) 3 双闭环直流调速系统的设计 (8) 3.1电流调节器的设计 (8) 3.2转速调节器的设计 (10) 3.3闭环动态结构框图设计 (12) 3.4设计实例 (12) 3.4.1设计电流调节器 (13) 3.4.2设计转速调节器 (15) 4.Matlab仿真 (17) 4.1仿真结果分析 (19) 5 结论 (20) 参考文献 (21)
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊1 绪论 1.1课题研究背景 直流调速是现代电力拖动自动控制系统中发展较早的技术。就目前而言,直流调速系统仍然是自动调速系统的主要形式,电机自动控制系统广泛应用于机械,钢铁,矿山,冶金,化工,石油,纺织,军工等行业。这些行业中绝大部分生产机械都采用电动机作原动机。有效地控制电机,提高其运行性能,对国民经济具有十分重要的现实意义。 以上等等需要高性能调速的场合得到广泛的应用。然而传统双闭环直流电动机调速系统多数采用结构比较简单、性能相对稳定的常规PID控制技术,在实际的拖动控制系统中,由于电机本身及拖动负载的参数(如转动惯量)并不像模型那样保持不变,而是在某些具体场合会随工况发生改变;与此同时,电机作为被控对象是非线性的,很多拖动负载含有间隙或弹性等非线性的因素。因此被控制对象的参数发生改变或非线性特性,使得线性的常参数的PID控制器往往顾此失彼,不能使得系统在各种工况下都保持与设计时一致的性能指标,常常使控制系统的鲁棒性较差,尤其对模型参数变化范围大且具的非线性环节较强的系统,常规PID调节器就很难满足精度高、响应快的控制指标,往往不能有效克服模型参数变化范围大及非线性因素的影响。 1.2研究双闭环直流调速系统的目的和意义 双闭环直流调速系统是性能很好,应用最广的直流调速系统。采用该系统可获得优良的静、动态调速特性。此系统的控制规律,性能特点和设计方法是各种交、直流电力拖动自动控制系统的重要基础。 20世纪90年代前的大约50年的时间里,直流电动机几乎是唯一的一种能实现高性能拖动控制的电动机,直流电动机的定子磁场和转子磁场相互独立并且正交,为控制提供了便捷的方式,使得电动机具有优良的起动,制动和调速性能。尽管近年来直流电动机不断受到交流电动机及其它电动机的挑战,但至今直流电动机仍然是大多数变速运动控制和闭环位置伺服控制首选。因为它具有良好的线性特性,优异的控制性能,高效率等优点。直流调速仍然是目前最可靠,精度最高的调速方法。 通过对转速、电流双闭环直流调速系统的了解,使我们能够更好的掌握调速系统的基本理论及相关内容,在对其各种性能加深了解的同时,能够发现其缺陷之处,通过对该系统不足之处的完善,可提高该系统的性能,使其能够适用于各种工作场合,提高其使用效率。并以此为基础,再对交流调速系统进行研究,最终掌握各种交、直流调速系统的原理,使之能够应用于国民经济各个
电机与拖动控制实验及其MATLAB仿真: 《电机与拖动控制实验及其MATLAB仿真》是2014年11月18日清华大学出版社出版的图书,作者是曹永娟。 内容简介: 本书分上、下两篇。上篇为电机与拖动控制实验教程,针对MCL 系列电机实验教学系统进行介绍,包括变压器、同步电机、异步电机、直流电机以及直流调速系统、交流调速系统拖动控制实验内容。 目录: 上篇电机与拖动控制实验 第1章电机实验装置和基本要求 1.1MCLⅡ型电机教学实验台 1.2实验装置和挂件箱的使用 1.2.1MCLⅡ型电机实验装置交流及直流电源操作说明 1.2.2仪表的使用 1.2.3挂件箱的使用 1.2.4交直流电机的使用 1.2.5导轨、测速发电机及转速计的使用 第2章电机与拖动控制实验基本要求和安全操作规程 2.1实验基本要求 2.2实验前的准备 2.3实验的进行 2.4实验报告
2.5实验安全操作规程 第3章变压器实验 3.1单相变压器 3.1.1实验目的 3.1.2预习要点 3.1.3实验项目 3.1.4实验设备及仪器 3.1.5实验方法 3.1.6实验报告 3.2三相变压器 3.2.1实验目的 3.2.2预习要点 3.2.3实验项目 3.2.4实验设备及仪器 3.2.5实验方法 3.2.6实验报告 3.3三相变压器的连接组和不对称短路3.3.1实验目的 3.3.2预习要点 3.3.3实验项目 3.3.4实验设备及仪器 3.3.5实验方法
3.3.6实验报告 3.3.7附录 3.4三相变压器的并联运行3. 4.1实验目的 3.4.2预习要点 3.4.3实验项目 3.4.4实验设备及仪器 3.4.5实验方法 3.4.6实验报告 第4章同步电机实验 4.1三相同步发电机的运行特性4.1.1实验目的 4.1.2预习要点 4.1.3实验项目 4.1.4实验设备及仪器 4.1.5实验方法 4.1.6实验报告 4.1.7思考题 4.2三相同步发电机的并联运行4.2.1实验目的 4.2.2预习要点 4.2.3实验项目
. University of South China 电气传动技术 实验报告1 实验名称直流电动机闭环调速实验 学院名称电气工程学院 指导教师 班级电力 学号 学生姓名 文档Word . 一预习报告
目的:1了解并掌握典型环节模拟电路构成方法。 2 熟悉各典型线性环节阶跃响应曲线。 3 了解参数变化对典型环节动态性能影响。内容: 1比例积分控制的无静差直流调速系统的仿真模型 2电流环调速系统的仿真模型 3转速环调速系统的仿真模型
文档Word . 二实验报告 直流电动机:额定电压U=220N,额定电流I=55A,额定转速 dNN n=1000r/min,电动机电动势系数C=0.192V·min/r。假定晶闸管整流eN装置输出电流可逆,装置的放大系数Ks=44,滞后的时间常数 T=0.00167s。电枢回路总电阻R=1.0Ω,电枢回路电磁时间常数 s T=0.00167s,电力拖动系统机电时间常数T=0.075s。转速反馈系数ml*U。对应额定转速时的给定电压·α=0.01Vmin/r=10V。双闭环调速系统中Ks=40,T=0.0017s,T=0.18s,T=0.03s,T=0.002s,T=0.01s,R=0onlmsoi Ω,C=0.132V·min/r,α=0.00666V·min/r,β=0.05V·min/r。e一比例积分控制的无静差直流调速系统中PI调节器的值为: K=0.56,1/τ=11.34 P 文档Word .
无静差调速系统输出(Scope图像1) 输出波形比例部分(Scope1图像2) 对比图1和图2可以发现,只应用比例控制的话,系统响应速度快,但是静差率大,而添加积分环节后,系统既保留了比例环节的快速响应性,又具有了积分环节的无静差调速特性,使调速系统稳定性相对更高,动态响应速度也快。 文档Word .
数字化直流电机双闭调速系统 摘要本文叙述了直流电动机的基本原理和调速原理,介绍了直流电动机开环和双闭环调速系统的组成及静、动态特性,并且根据直流电动机的基本方程建立了调速系统的数学模型,给出了动态结构框图,用工程设计方法设计了直流电动机双闭环调速系统。最后用MATLAB 软件搭建了仿真模型,对调速系统进行了仿真研究。通过对直流电动机双闭环调速系统动态特性的研究与仿真,可以清楚地看到,直流电动机双闭环调速系统具有较好的动态特性,可以在给定调速范围内,实现无静差平滑调速,这为直流电动机调速系统的硬件实验提供了理论依据。 关键词:直流调速;双闭环调速;转速环;电流环;MATLAB 仿真 目录 第1 章绪论 (1) 第2 章课程设计的方案 (2) 2.1 概述 (2) 2.2 方案选择 (2) 2.3 系统组成总体结构 (4) 第3 章硬件设计 (5) 3.1 单片机控制器 (5) 3.2 接口电路 (5)
3.3 D/A 转换电路 (6) 3.4 触发电路 (6) 3.5 三相整流电路 (7) 3.6 电流检测电路 (7) 3.7 A/D 转换电路 (8) 3.8 转速检测电路 (8) 3.9 键盘显示电路 (9) 第4 章软件设计 (11) 4.1 设计要求 (11) 4.2 电流环的设计 (11) 4.3 转速环的设计 (12) 4.4 闭环动态结构框图设计 (12) 4.5 程序设计 (13) 第5 章系统测试与分析/实验数据及分析 (15) 第6 章课程设计总结 (17) 参考文献 (18) 第1章绪论 三十多年来,直流电机调速控制经历了重大的变革。传统的控制系统采用模拟元件,虽在一定程度上满足生产要求,但是因为元件容易老化,在使用中易受外界干扰影响,并且线路复杂、通用性差,控制效果受器件性能、温度等因素的影响,故系统的运行可靠性及标准性得不到保证,甚至出现事故。而如今首先实现了整流器的更新换代,以晶闸管整流装置取代了习用已久的直流发电机电动机组及水银整流装置使直流电气传动完成了一次大的跃进。大功率直流调速系统通常采用三相全控桥式整流电路对电动机进行供电,从而控制电动机的转速。同时,控制电路已经实现高集成化、小型化、高可靠性及低成本。以上技术的应用,使直流调速系统的性能指标大幅提高,应用范围不断扩大。直流调速技术不断发展,走向成熟化、完善化、系列化、标准化,在可逆脉宽调速、高精度的电气传动领域中仍然难以替代。直流调速是指人为地或自动地改变直流电动机的转速,以满足工作机械的要求。从机械特性上看,就是通过改变电动机的参数或外加电压等方法来改变电动机的机械特性,从而改变电动机机械特性和工作特性机械特性的交点,使电动机的稳定运转速度发生变化。直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在轧钢机、矿井卷扬机、挖掘机、高层电梯等需要高性能可控电力拖动领域应用历史悠久。近年来,
西安邮电学院《Matlab》实验报告(四)2011- 2012 学年第 1 学期自动化专业:自动0903 班级:学号:姓名:
2011 年11 月10 日 第四次SIMULINK仿真实验一、实验目的1.熟悉Simulink的操作环境并掌握绘制系统模型的方法。 2.掌握Simulink 中子系统模块的建立与封装技术。 3.对简单系统所给出的数学模型能转化为系统仿真模型并进行仿真分析。二、实验设备及条件计算机一台(带有MATLAB6.5以上的软件环境)。三、实验内容1.建立下图5-1所示的Simulink仿真模型并进行仿真,改变Gain模块的增益,观察Scope显示波形的变化。图5-1 正弦波产生及观测模型92.利用simulink仿真来实现摄氏温度到华氏温度的转化:(fc c5),参考模型为图5-2。范围在-10℃~100℃图5-2 摄氏温度到华氏温度的转化的参考模型3.利用Simulink仿真下列曲线,取。21111。 3579仿真参 考模型如下图5-3,Sine Wave5模块参数设置如下图5-4,请仿真其结果。图5-3 的仿真参考模型图图5-4 Sine Wave5模块参数设置图x(t) 4.如图5-5所示是分频器仿真框图,其组成仅有三台设备:脉冲发生器,分频器和示波器。分频器送
出一个到达脉冲,第一路cnt(计数),它的数值表示 在本分频周期记录到多少个脉冲;第二路是hit(到达),就是分频后的脉冲输出,仿真出结果来。 图5-5 分频器仿真框图 5. Simulink 综合演示实验 ---悬吊式起重机动力学仿 真悬吊式起重机结构简图 1. 悬吊式起重机动力 学方程 2小车水平方向受力方程 pt2dt2d吊绳垂直方pp2向受力方程dt2d小车 的力矩p2dt平衡方程式中,mt、mp、I、c、l、F、x、分别为起重机的小车质量、吊重、 吊重惯量、等价粘性摩擦系数、钢丝绳长(不计绳重),小车驱动力、小车位移以及钢丝绳的摆角。由(2)、(3)式去掉P,则有 2. 悬吊式起重机动力学Simulink仿真为便于建模,将起重机动力学方程改写为: p由以上二式可建立如图所示的起重机 Simulink模型:1图中:lmp=mpl 在运行仿真模型前,须先计算出k1、k2和lmp。设mt =50kg,mp=270kg,l=4m,,在MATLAB指令窗输入以下指令 l=4; c=20; mp=270; mt=50; I=mp*l^2; %计算吊重转动惯量 lmp=l*mp;
《运动控制系统》课程设计指导书 一、课程设计的主要任务 (一)系统各环节选型 1、主回路方案确定。 2、控制回路选择:给定器、调节放大器、触发器、稳压电源、电流截止环节,调节器锁零电路、电流、电压检测环节、同步变压器接线方式(须对以上环节画出线路图,说明其原理)。 (二)主要电气设备的计算和选择 1、整流变压器计算:变压器原副方电压、电流、容量以及联接组别选择。 2、晶闸管整流元件:电压定额、电流定额计算及定额选择。 3、系统各主要保护环节的设计:快速熔断器计算选择、阻容保护计算选择计算。 4、平波电抗器选择计算。 (三)系统参数计算 1、电流调节器ACR 中i i R C 、 计算。
2、转速调节器ASR 中n n R C 、 计算。 3、动态性能指标计算。 (四)画出双闭环调速系统电气原理图。 使用A1或A2图纸,并画出动态框图和波德图(在设计说明书中)。 二、基本要求 1、使学生进一步熟悉和掌握单、双闭环直流调速系统工作原理,了解工程设计的基本方法和步骤。 2、熟练掌握主电路结构选择方法,主电路元器件的选型计算方法。 3、熟练掌握过电压、过电流保护方式的配置及其整定计算。 4、掌握触发电路的选型、设计方法。 5、掌握同步电压相位的选择方法。 6、掌握速度调节器、电流调节器的典型设计方法。 7、掌握电气系统线路图绘制方法。 8、掌握撰写课程设计报告的方法。 三、 课程设计原始数据
有以下四个设计课题可供选用: A 组: 直流他励电动机:功率P e =1.1KW ,额定电流I e =6.7A ,磁极对数P=1, n e =1500r/min,励磁电压220V,电枢绕组电阻R a =2.34Ω,主电路总电阻R =7Ω,L ∑=246.25Mh(电枢电感、平波电感和变压器电感之和),K s =58.4,机电时间常数 T m =116.2ms ,滤波时间常数T on =T oi =0.00235s ,过载倍数λ=1.5,电流给定最大值 10V U im =*,速度给定最大值 10V U n =* B 组: 直流他励电动机:功率P e =22KW ,额定电压U e =220V ,额定电流I e =116A,磁极对 数P=2,n e =1500r/min,励磁电压220V,电枢绕组电阻R a =0.112Ω,主电路总电阻R = 0.32Ω,L ∑=37.22mH(电枢电感、平波电感和变压器电感之和),电磁系数 C e =0.138 Vmin /r ,K s =22,电磁时间常数T L =0.116ms ,机电时间常数T m =0.157ms , 滤波时间常数T on =T oi =0.00235s ,过载倍数λ=1.5,电流给定最大值 10V U im =*,速度给定最大值 10V U n =* C 组: 直流他励电动机:功率Pe =145KW ,额定电压Ue=220V ,额定电流Ie=733A,磁极对数P=2,ne=430r/min,励磁电压220V,电枢绕组电阻Ra=0.0015Ω,主电路总电阻R =0.036Ω,Ks=41.5,电磁时间常数TL=0.0734ms ,机电时间常数
班级:姓名:学号:
实验一:AM 信号的调制与解调 实验目的:1.了解模拟通信系统的仿真原理。 2.AM 信号是如何进行调制与解调的。 实验原理: 1.调制原理:AM 调制是用调制信号去控制高频正弦载波的幅度,使其按调制信号的规律变化的过程,就是按原始电信号的变化规律去改变载波某些参量的过程。 + m(t) S AM (t)A 0 cos ωc t AM 信号的时域和频域的表达式分别为: ()()[]()()()()t t m t A t t m A t S C C C AM ωωωcos cos cos 00+=+= 式(4-1) ()()()[]()()[]C C C C AM M M A S ωωωωωωδωωδπω-+++ -++=2 1 0 式(4-2) 在式中,为外加的直流分量;可以是确知信号也可以是 随机信号,但通常认为其平均值为0,即。其频谱是DSB SC-AM 信号的频谱加上离散大载波的频谱。 2.解调原理:AM 信号的解调是把接收到的已调信号还 原为调制信号。 AM 信号的解调方法有两种:相干解调和包 络检波解调。 AM 相干解调原理框图如图。相干解调(同步解调):利用
相干载波(频率和相位都与原载波相同的恢复载波)进行的解调,相干解调的关键在于必须产生一个与调制器同频同相位的载波。如果同频同相位的条件得不到满足,则会破坏原始信号的恢复。相干载波的提取:(1)导频法:在发送端加上一离散的载频分量,即导频,在接收端用窄带滤波器提取出来作为相干载波,导频的功率要求比调制信号的功率小;(2)不需导频的方法:平方环法、COSTAS环法。 LPF m0(t) S AM(t) cosωc t AM信号波形的包络与输入基带信号成正比,故可以用包络检波的方法恢复原始调制信号。包络检波器一般由半波或全波整流器和低通滤波器组成: (1)整流:只保留信号中幅度大于0的部分。(2)低通滤波器:过滤出基带信号;(3)隔直流电容:过滤掉直流分量。实验内容: 1.AM相干解调框图。
MATLA仿真实验报告 学院:计算机与信息学院 课程:—随机信号分析 姓名: 学号: 班级: 指导老师: 实验一
题目:编写一个产生均值为1,方差为4的高斯随机分布函数程序, 求最大值,最小值,均值和方差,并于理论值比较。 解:具体的文件如下,相应的绘图结果如下图所示 G仁random( 'Normal' ,0,4,1,1024); y=max(G1) x=mi n(G1) m=mea n(G1) d=var(G1) plot(G1);
实验二 题目:编写一个产生协方差函数为CC)=4e":的平稳高斯过程的程序,产生样本函数。估计所产生样本的时间自相关函数和功率谱密度,并求统计自相关函数和功率谱密度,最后将结果与理论值比较。 解:具体的文件如下,相应的绘图结果如下图所示。 N=10000; Ts=0.001; sigma=2; beta=2; a=exp(-beta*Ts); b=sigma*sqrt(1-a*a); w=normrnd(0,1,[1,N]); x=zeros(1,N); x(1)=sigma*w(1); for i=2:N x(i)=a*x(i-1)+b*w(i); end %polt(x); Rxx=xcorr(x0)/N; m=[-N+1:N-1]; Rxx0=(sigma A2)*exp(-beta*abs(m*Ts)); y=filter(b,a,x) plot(m*Ts,RxxO, 'b.' ,m*Ts,Rxx, 'r');
periodogram(y,[],N,1/Ts); 文件旧硯化)插入(1〕 ZMCD 克闻〔D ]窗口曲) Frequency (Hz) 50 100 150 200 250 300 350 400 450 500 NH---.HP)&UO 二 balj/ 」- □歹
一.实验原理 直流电机在应用中有多种控制方式,在直流电机的调速控制系统中,主要采用电枢电压控制电机的转速与方向。 功率放大器是电机调速系统中的重要部件,它的性能及价格对系统都有重要的影响。过去的功率放大器是采用磁放大器、交磁放大机或可控硅<晶闸管)。现在基本上采用晶体管功率放大器。PWM功率放大器与线性功率放大器相比,有功耗低、效率高,有利于克服直流电机的静摩擦等优点。 PWM调制与晶体管功率放大器的工作原理: 1.PWM的工作原理 图1-1PWM的控制电路 上图所示为SG3525为核心的控制电路,SG3525是美国Silicon General公司生产的专用。 PWM控制集成芯片,其内部电路结构及各引脚如图1-2所示,它采用恒频脉宽调制控制方案,其内部包含有精密基准源、锯齿波振荡器、误差放大器、比较器、分频器和保护电路等。调节Ur的大小,在A、B两端可输出两个幅度相等、频率相等、相位相互错开180度、占空比可调的矩形波<即PWM信号)。它适用于各开关电源、斩波器的控制。 2.功放电路 直流电机PWM输出的信号一般比较小,不能直接去驱动直流电机,它必须经过功放后再接到直流电机的两端。该实验装置中采用直流15V的直流电压功放电路驱动。 3.反馈接口 在直流电机控制系统中,在直流电机的轴上贴有一块小磁钢,电机转动带动磁钢转动。磁钢的下面中有一个霍尔元件,当磁钢转到时霍尔元件感应输出。
4.直流电机控制系统如图1-3所示,由霍耳传感器将电机的速度转换成电信号,经数据采集卡变换成数字量后送到计算机与给定值比较,所得的差值按照一定的规律<通常为PID)运算,然后经数据采集卡输出控制量,供执行器来控制电机的转速和方向。 图1-2 SG3525内部结构 图1-3 直流电机控制系统 5.PID原理 过程控制的基本概念 过程控制――对生产过程的某一或某些物理参数进行的自动控制。 1.模拟控制系统 图1-4 基本模拟反馈控制回路 被控量的值由传感器或变送器来检测,这个值与给定值进行比较,得到偏差,模拟调节器依一定控制规律使操作变量变化,以使偏差趋近于零,其输出通过执行器作用于过程。 控制规律用对应的模拟硬件来实现,控制规律的修改需要更换模拟硬件。 2.微机过程控制系统
实验五SIMULINK仿真实验 一、实验目的 考察连续时间系统的采样控制中,零阶保持器的作用与采样时间间隔对Ts 对系统稳定性的影响 二、实验步骤 开机执行程序,用鼠标双击图标,进入MA TLAB命令窗口:Command Windows在Command Windows窗口中输入:simulink,进入仿真界面,并新建Model文件在Model界面中构造连续时间系统的结构图。作时域仿真并确定系统时域性能指标。 图(6-1) 带零阶保持器的采样控制系统如下图所示。作时域仿真,调整采样间隔时间Ts,观察对系统稳定性的影响。 图(6-2) 参考输入量(给定值)作用时,系统连接如图(6-1)所示: 图(6-3) 三、实验要求 (1)按照结构图程序设计好模型图,完成时域仿真的结构图 (2)认真做好时域仿真记录 (3)参考实验图,建立所示如图(6-1)、图(6-2)、图(6-3)的实验原理图; (4)将鼠标移到原理图中的PID模块进行双击,出现参数设定对话框,将PID 控制器的积分增益和微分增益改为0,使其具有比例调节功能,对系统进行纯比例控制。
1. 单击工具栏中的图标,开始仿真,观测系统的响应曲线,分析系统性 能;调整比例增益,观察响应曲线的变化,分析系统性能的变化。 2. 重复步骤2-3,将控制器的功能改为比例微分控制,观测系统的响应曲线, 分析比例微分控制的作用。 3. 重复步骤2-3,将控制器的功能改为比例积分控制,观测系统的响应曲线, 分析比例积分控制的作用。 4. 重复步骤2-3,将控制器的功能改为比例积分微分控制,观测系统的响应曲 线,分析比例积分微分控制的作用。 5. 参照实验一的步骤,绘出如图(6-2)所示的方块图; 6. 将PID控制器的积分增益和微分增益改为0,对系统进行纯比例控制。不断 修改比例增益,使系统输出的过渡过程曲线的衰减比n=4,记下此时的比例增益值。 7. 修改比例增益,使系统输出的过渡过程曲线的衰减比n=2,记下此时的比例 增益值。 8. 修改比例增益,使系统输出呈临界振荡波形,记下此时的比例增益值。 9. 将PID控制器的比例、积分增益进行修改,对系统进行比例积分控制。不断 修改比例、积分增益,使系统输出的过渡过程曲线的衰减比n=2,4,10,记下此时比例和积分增益。 10、将PID控制器的比例, 积分, 微分增益进行修改,对系统进行比例、积分、 微分控制。不断修改比例、积分、微分增益,使系统输出的过渡过程曲线的衰减比n=2、4、10记下此时的比例、积分、微分增益值。 四、实验报告要求 (1)叙述零阶保持器的作用 (2)讨论采样时间间隔Ts对系统的影响。 (3)写出完整实验报告 附:step模块在sources库中 sum模块在math operations库中 scope模块在sinks库中 transfer fcn模块在continuous库中 zero-order hold模块在discrete库中
课程设计报告 课程名称:计算机控制系统 设计题目:直流电机闭环调速 院系:电气信息学院 班级: 姓名: 学号: 姓名: 学号: 姓名: 学号: 指导教师: 设计时间:
摘要 在电气时代的今天,电动机在工农业生产、人们日常生活中起着十分重要的作用。直流电机是最常见的一种电机,在各领域中得到广泛的应用。研究直流电机的控制和测量方法,对提高控制精度和响应速度、节约能源等都具有重要意义。电机调速问题一直是自动化领域中比较重要的问题之一。不同领域对于电机的调速性能有着不同的要求,因此,不同的调速方法有着不同的应用场合。 为了提高直流调速系统的动态、静态性能,通常采用闭环控制系统(主要包括单闭环、双闭环)。而在对调速指标要求不高的场合,采用单闭环即可。闭环系统较之开环系统能自动侦测把输出信号的一部分拉回到输入端,与输入信号相比较,其差值作为实际的输入信号;能自动调节输入量,能提高系统稳定性。在对调速系统性能有较高要求的领域常利用直流电动机,但直流电动机开环系统稳定性不能满足要求,可利用转速单闭环提高稳态精度。 本次课程设计利用软件定时方式采用Intel 8255A可编程外设接口芯片唐都TD-PITC 实验系统上模拟直流电动机闭环调速系统,A/D转换器实现模拟信号到数字信号的转换,设置电机转速的给定值,通过PWM方式可实现电机转速的调节,LED灯显示电机转速的大小状态。 关键字:闭环调速、inter 8255A、A/D转换器、PWM、LED
目录 摘要 1 控制系统总体设计方案 (3) 2 系统的组成及工作原理 (4) 2.1 8255工作原理 (4) 2.2 转速调节原理 (5) 2.3 A/D转换原理 (5) 2.4 LED灯的工作原理 (6) 2.5 实现两位十进制数的显示 (6) 3 硬件设计 (7) 3.1 接线图 (7) 4 软件设计 (8) 4.1 转速调节程序设计框图 (8) 4.2 主程序流程图 (9) 4.3 程序清单 (10) 5 调试及结果 (21) 5.1 调试步骤 (21) 5.2结果分析 (21) 5.2结论 (21) 参考文献 (22)
第 1 章前言 1.1 课题的研究意义 现代化的工业生产过程中,几乎无处不使用电力传动装置,尤其是在石油、化工、电力、冶金、轻工、核能等工业生产中对电动机的控制更是起着举足轻重的作用。因此调速系统成为当今电力拖动自动控制系统中应用最广泛的一种系统。随着生产工艺、产品质量要求不断提高和产量的增长,使得越来越多的生产机械要求能实现自动调速,而且,当今控制系统已进入了计算机时代,在许多领域已实现了智能化控制。对传统的过程工业而言,利用先进的自动化硬件及软件组成工业过程自动化调速系统,大大提高了生产过程的安全性、可靠性、稳定性。提高了产品产量和质量、提高了劳动生产率,企业的综合经济效益,同时,也大大促进了综合国力的增强。对可调速的传动系统,可分为直流调速和交流调速。 直流调速系统凭借优良的调速特性,调速平滑、范围宽、精度高、过载能力大、动态性能好、易于控制以及良好的起、制动性能等优点,能满足生产过程自动化系统中各种不同的特殊运行要求,所以在电气传动中获得了广泛应用。为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(包括单闭环系统和多闭环系统)。对调速指标要求不高的场合,采用单闭环系统,而对调速指标较高的则采用多闭环系统。按反馈的方式不同可分为转速反馈,电流反馈,电压反馈等。在单闭环系统中,转速单闭环使用较多。 本次设计是基于51 系列单片机对直流电动机单闭环调速系统进行设计,能实现对直流电动机转速控制的功能,实现控制目的同时还配有显示装置,能实时反映当下直流电机的转速值,以优化整个系统的完整性。 通过这次设计,可以使我对51 系列单片机的应用和直流电机闭环调节系统进行进一步的学习,增强知识的整合度使相关知识融汇贯通,为以后的工作奠定一定的知识基础。 1.2 直流电机调速的发展 由于直流电动机具有极好的运动性能和控制特性,尽管它不如交流电动机那样结构简单、价格便宜、制造方便、维护容易,但是长期以来,直流调速系统一直占据垄断地位。 当然,近年来,随着计算机技术、电力电子技术和控制技术的发展,交流调速系统发展 快,在许多场合正逐渐取代直流调速系统。但是就目前来看,直流调速系统仍然是自动调 速系统的主要形式。在我国许多工业部门,如轧钢、矿山采掘、海洋钻探、金属加工、纺织、造纸以及高层建筑等需要高性能可控电力拖动场合,仍然广泛采用直流调速系统。而且,直流调速系统在理论和实践上都比较成熟,从控制技术角度来看,它又是交流调速系
实验一:AM 信号的调制与解调 实验目的:1.了解模拟通信系统的仿真原理。 2.AM 信号是如何进行调制与解调的。 实验原理: 1.调制原理:AM 调制是用调制信号去控制高频正弦载波的幅度,使其按调制信号的规律变化的过程,就是按原始电信号的变化规律去改变载波某些参量的过程。 + m(t) S AM (t)A 0 cos ωc t AM 信号的时域和频域的表达式分别为: ()()[]()()()()t t m t A t t m A t S C C C AM ωωωcos cos cos 00+=+= 式(4-1) ()()()[]()()[]C C C C AM M M A S ωωωωωωδωωδπω-+++ -++=2 1 0 式(4-2) 在式中,为外加的直流分量;可以是确知信号也可以是 随机信号,但通常认为其平均值为0,即。其频谱是DSB SC-AM 信号的频谱加上离散大载波的频谱。 2.解调原理:AM 信号的解调是把接收到的已调信号还 原为调制信号。 AM 信号的解调方法有两种:相干解调和包 络检波解调。 AM 相干解调原理框图如图。相干解调(同步解调):利用
相干载波(频率和相位都与原载波相同的恢复载波)进行的解调,相干解调的关键在于必须产生一个与调制器同频同相位的载波。如果同频同相位的条件得不到满足,则会破坏原始信号的恢复。相干载波的提取:(1)导频法:在发送端加上一离散的载频分量,即导频,在接收端用窄带滤波器提取出来作为相干载波,导频的功率要求比调制信号的功率小;(2)不需导频的方法:平方环法、COSTAS环法。 LPF m0(t) S AM(t) cosωc t AM信号波形的包络与输入基带信号成正比,故可以用包络检波的方法恢复原始调制信号。包络检波器一般由半波或全波整流器和低通滤波器组成: (1)整流:只保留信号中幅度大于0的部分。(2)低通滤波器:过滤出基带信号;(3)隔直流电容:过滤掉直流分量。实验内容: 1.AM相干解调框图。