房室模型的综述
1前言
神经系统可能是我们体内最复杂和最重要的系统。它负责传递有关肌肉运动和感官输入的信息,使我们能够与周围的世界互动并感知它们。神经系统主要由称为神经元的大量互连细胞网络组成。因此,对神经元的研究具有重要意义,因为了解神经元本身的性质有助于理解它们如何在更大的网络中协同工作。
1.1神经元解剖学
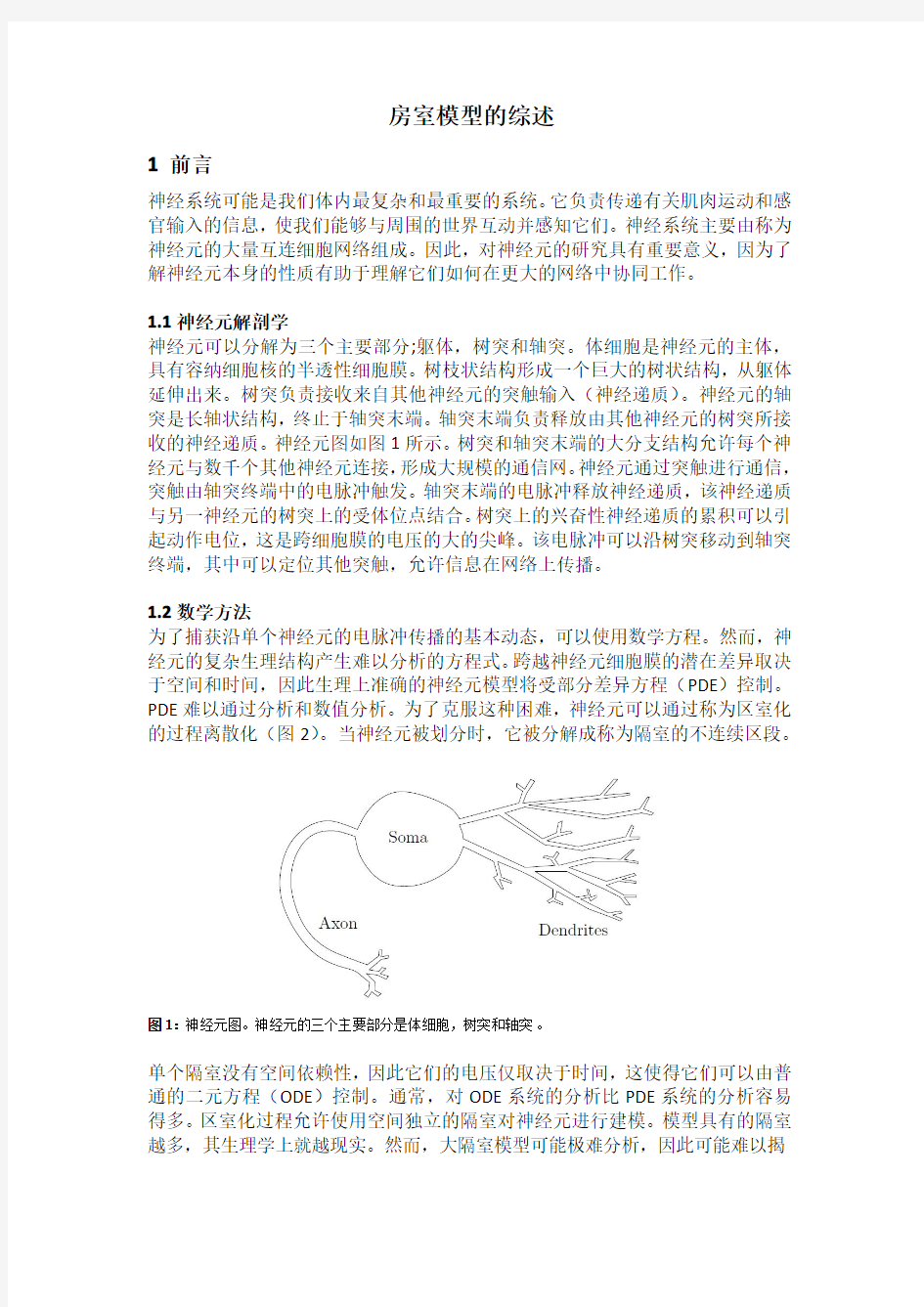
神经元可以分解为三个主要部分;躯体,树突和轴突。体细胞是神经元的主体,具有容纳细胞核的半透性细胞膜。树枝状结构形成一个巨大的树状结构,从躯体延伸出来。树突负责接收来自其他神经元的突触输入(神经递质)。神经元的轴突是长轴状结构,终止于轴突末端。轴突末端负责释放由其他神经元的树突所接收的神经递质。神经元图如图1所示。树突和轴突末端的大分支结构允许每个神经元与数千个其他神经元连接,形成大规模的通信网。神经元通过突触进行通信,突触由轴突终端中的电脉冲触发。轴突末端的电脉冲释放神经递质,该神经递质与另一神经元的树突上的受体位点结合。树突上的兴奋性神经递质的累积可以引起动作电位,这是跨细胞膜的电压的大的尖峰。该电脉冲可以沿树突移动到轴突终端,其中可以定位其他突触,允许信息在网络上传播。
1.2数学方法
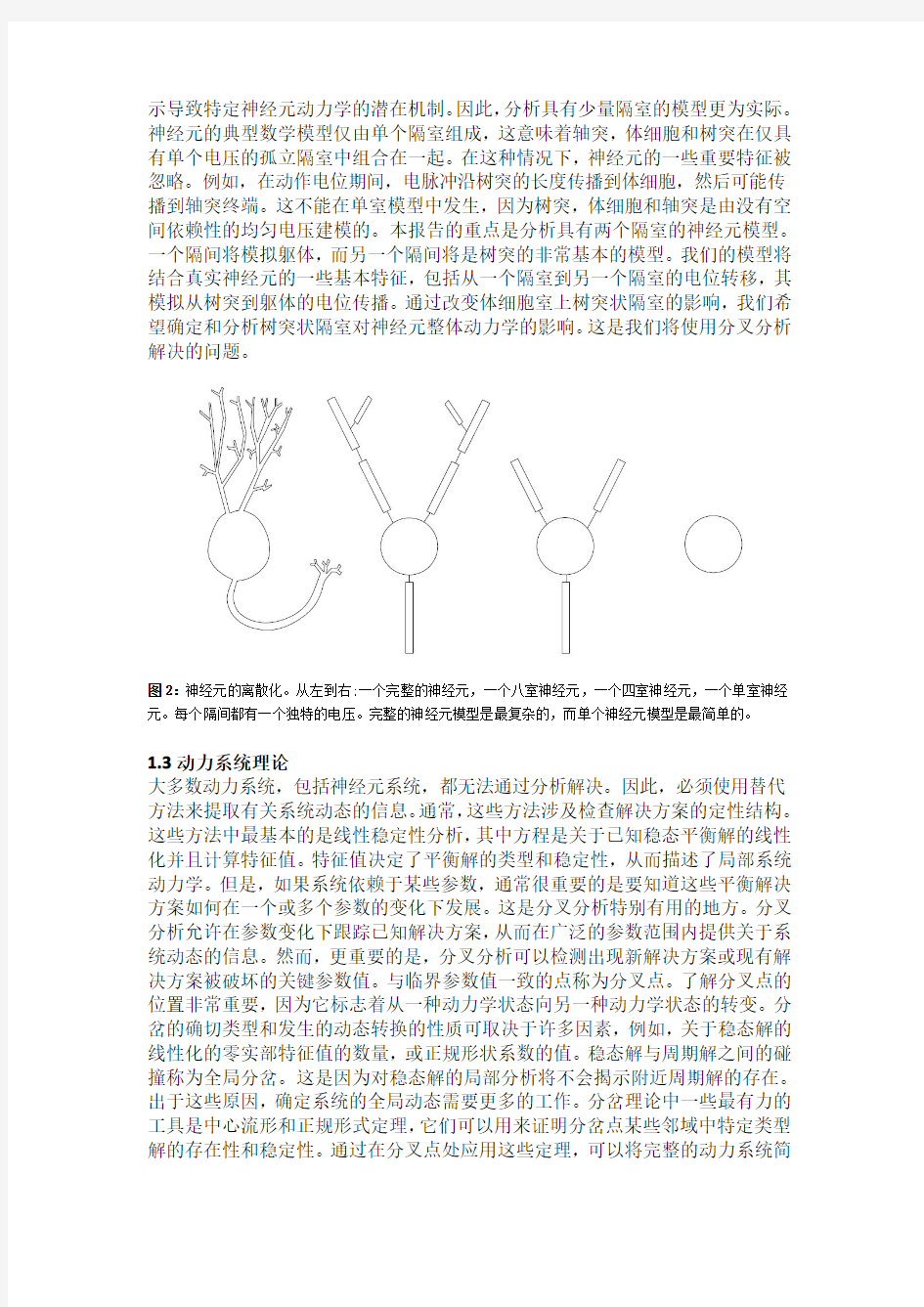
为了捕获沿单个神经元的电脉冲传播的基本动态,可以使用数学方程。然而,神经元的复杂生理结构产生难以分析的方程式。跨越神经元细胞膜的潜在差异取决于空间和时间,因此生理上准确的神经元模型将受部分差异方程(PDE)控制。PDE难以通过分析和数值分析。为了克服这种困难,神经元可以通过称为区室化的过程离散化(图2)。当神经元被划分时,它被分解成称为隔室的不连续区段。
图1:神经元图。神经元的三个主要部分是体细胞,树突和轴突。
单个隔室没有空间依赖性,因此它们的电压仅取决于时间,这使得它们可以由普通的二元方程(ODE)控制。通常,对ODE系统的分析比PDE系统的分析容易得多。区室化过程允许使用空间独立的隔室对神经元进行建模。模型具有的隔室越多,其生理学上就越现实。然而,大隔室模型可能极难分析,因此可能难以揭
示导致特定神经元动力学的潜在机制。因此,分析具有少量隔室的模型更为实际。神经元的典型数学模型仅由单个隔室组成,这意味着轴突,体细胞和树突在仅具有单个电压的孤立隔室中组合在一起。在这种情况下,神经元的一些重要特征被忽略。例如,在动作电位期间,电脉冲沿树突的长度传播到体细胞,然后可能传播到轴突终端。这不能在单室模型中发生,因为树突,体细胞和轴突是由没有空间依赖性的均匀电压建模的。本报告的重点是分析具有两个隔室的神经元模型。一个隔间将模拟躯体,而另一个隔间将是树突的非常基本的模型。我们的模型将结合真实神经元的一些基本特征,包括从一个隔室到另一个隔室的电位转移,其模拟从树突到躯体的电位传播。通过改变体细胞室上树突状隔室的影响,我们希望确定和分析树突状隔室对神经元整体动力学的影响。这是我们将使用分叉分析解决的问题。
图2:神经元的离散化。从左到右;一个完整的神经元,一个八室神经元,一个四室神经元,一个单室神经元。每个隔间都有一个独特的电压。完整的神经元模型是最复杂的,而单个神经元模型是最简单的。
1.3动力系统理论
大多数动力系统,包括神经元系统,都无法通过分析解决。因此,必须使用替代方法来提取有关系统动态的信息。通常,这些方法涉及检查解决方案的定性结构。这些方法中最基本的是线性稳定性分析,其中方程是关于已知稳态平衡解的线性化并且计算特征值。特征值决定了平衡解的类型和稳定性,从而描述了局部系统动力学。但是,如果系统依赖于某些参数,通常很重要的是要知道这些平衡解决方案如何在一个或多个参数的变化下发展。这是分叉分析特别有用的地方。分叉分析允许在参数变化下跟踪已知解决方案,从而在广泛的参数范围内提供关于系统动态的信息。然而,更重要的是,分叉分析可以检测出现新解决方案或现有解决方案被破坏的关键参数值。与临界参数值一致的点称为分叉点。了解分叉点的位置非常重要,因为它标志着从一种动力学状态向另一种动力学状态的转变。分岔的确切类型和发生的动态转换的性质可取决于许多因素,例如,关于稳态解的线性化的零实部特征值的数量,或正规形状系数的值。稳态解与周期解之间的碰撞称为全局分岔。这是因为对稳态解的局部分析将不会揭示附近周期解的存在。出于这些原因,确定系统的全局动态需要更多的工作。分岔理论中一些最有力的工具是中心流形和正规形式定理,它们可以用来证明分岔点某些邻域中特定类型解的存在性和稳定性。通过在分叉点处应用这些定理,可以将完整的动力系统简
化为具有相同定性动力学的更简单的系统。该系统称为拓扑正规形式。对于接近分叉点的参数值,完整方程组的动力学与正常形式的动力学相同。因此,正规形式的解决方案结构在质量上与整个系统类似,并且正常形式可用于推断关于整个系统的动态的信息。然而,重要的一点是,两个定理都不能用于确定正常形式和完整系统具有定性相似动态的邻域的大小。
1.4概述
在本报告中,我们分析了神经元的两室模型。特别地,我们感兴趣的是第二隔室如何模拟树突,影响神经元的整体动力学。为此,我们将使用分析和数值分岔理论的各个方面。
2两房室模型
神经元的数值计算具有丰富的结果,其基础是Hodgkin-Huxley 的离子通道模型和Rall 的神经元被动电缆模型。神经元电缆模型的离散描述就是房室模型。房室模型将空间上连续的单个神经元分成离散的多个房室,房室之间相互连接后整体描述神经元的时空变化。1991年Traub 构造了一个由19个房室组成的海马CA3锥体神经元模型[5],Pinsky 和Rinzel 在Traub 的基础上提出了由两个房室构成的简化的CA3锥体神经元模型,从此,各类神经元的房室模型文献大量出现,实验结果分析结合房室模型讨论逐渐成为研究神经元电学特性的主要方法。在此,先给出本论文中所要用到的房室数学模型:
)()(111++--+-=k k k k k k k k m v v r M v v r dt
dv C 其中,k v 是第k 个房室的膜电压,此房室可以用来表示胞体、树突或轴突,单位是mV;k r 、1r +k 分别表示第k 个房室与第1-k 及第1k +个房室的耦合电导;m C 表示膜电容,其值为12cm /F μ;k M 是房室之间的连接强度,在胞体处k M =8,在其它各房室处k M =2。神经元的数学建模是使用物理原理和使用精确确定的实验数据的经验方法的分析推导的有趣组合。通过将这些方法应用于每个隔室,可以导出一个普通的不同方程系统,该系统模拟该隔室中的电压。出于我们的目的,我们只考虑具有两个隔室的神经元;体细胞室和树突室。在本节中,我们推导出控制跨越体细胞的潜在差异和跨细胞膜的离子的方程式。此外,我们讨论如何建模树突并呈现报告中使用的特定神经元方程。
2.1胞体电位
与体内许多其他细胞一样,神经元的体细胞由浸入离子溶液中的半透性细胞膜组成。内部和外部(细胞内和细胞外)体细胞离子浓度的差异将导致离子跨越细胞膜,从而产生可测量的潜在差异和电性(参见图3)。由于细胞膜具有分离电荷的能力,因此可以将其建模为电容器。整个体细胞的潜在差异是内部和外部潜力之间的差异。
e i V V V -=s (1)
当电子平衡时,将达到平衡电位。事实上,任意离子A 的平衡势可以使用能斯特方程来计算,
)][][ln(i
e A A A nF RT E =(2)其中R 是通用气体常数,
T 是绝对温度,n 是离子的电荷,F 是法拉第常数,e A ,i ][分别是内部和外部离子浓度。当体细胞不处于静电平衡时,离子穿过膜的运动产生电流,细胞膜充当电阻器。像电池膜一样的电容器和电阻器可以将其建模为简单的电子电路(图4)。利用完善的电磁学定律,我们可以推导出一个能够模拟整个体细胞的潜在差异的不等方程。如上所述,细胞膜的作用类似于电容器,因此我们假设跨细胞膜的电压S V 满足等式
Q CV S =(3)
图3:内部浓度i A 与离子的外部浓度e A 之间的差异导致离子在细胞膜上使用,从而产生潜在的差异。为
了便于说明,我们使用了任意离子
A .
图4:使用电容器和电阻器将电池膜建模为电路。电阻器代表对膜上使用的所有离子的总电阻.其中C 是膜的电容,Q 是电荷,S V 是上面定义的躯体的潜在差异。我们确定了这种表达方式,并且认识到每单位时间的电荷变化是最新的,有
I dt
dQ C
≡=dt dV S (4)假设离子过程产生的电流与体电位具有线性关系。因此,电流-电压关系采用众所周知的形式IR V =,其中R 是电阻。就任意离子A 而言,由电极产生的电流是
)(g A s A A E V I -= (5)其中A E 是使用能斯特方程(2)计算的平衡势
A
A R 1g ≡ 是离子特异性膜电导。膜电导率是膜电阻的倒数。离子扩散产生的总电流量将表示为ion I ,其中
)(g i i s i
ion E V I -=∑ (6)
其中总和超过所有离子。在大多数神经元模型中,ion I 包含泄漏项)(g L L s E V -=,它表示小的时间独立电流,它们共同作用以使体细胞电位达到平衡电位。现在我们已经拥有了控制电路各个元件的必要方程式,我们可以推导出一个控制整个电路的方程,理想情况是膜电位。Kirchho?定律指出,进入结的电流总和必须等于离开结的电流之和,因此细胞膜的状态方程是
0dt
dV ion S =+I C (7)在实验和理论分析中,通常将外部电流注入到体细胞中以刺激离子扩散。在这种情况下,膜电位的等式采用这种形式
app ion S dt
dV I I C =+(8)其中app I 是施加的电流。
2.2电压相关电导
在对穿过细胞膜的单一物种离子产生的电流进行建模时,我们假设电流建模方程采用的形式
)
(g A s A A E V I -= A g 是膜的电导。然而,由于膜电导的生物学解释,单独该方程是不现实的。通过穿过开放的通道或门,离开细胞膜。因此,细胞膜的电导与打开多少通道并且可用于离子移动有关。通道的状态以及膜的电导通常取决于体细胞电位差。为了模拟通道的状态,采用统计方法并将膜电导写为
A A A p g g = ,10≤≤A P (9)
其中A g 是最大电导,好像每个通道都是开放的,A P 是与开放通道相关的电压依
赖概率。概率A P 通常是激活变量a 和失活变量b 的单项式,其采用形式
y x A b P a =(10)
指数x 和y 是整数,通常选择这些整数以获得最佳实验数据。统计上,激活变量是任何通道打开的概率,而失活变量是任何通道关闭的概率。因此,如果我们能够准确地模拟(in)激活变量的方程,我们就可以准确地描述膜电导和离子扩散产生的电流。模拟(in)激活变量演变的方程基于这样的前提,新道以与闭合信道的概率成比例的速率打开,反之亦然。因此,(in)激活变量根据变化而变化
c c dt
c c βα--=)1(dc (11)其中c 是激活或失活变量,)(c S c V αα=和)(c S c V ββ=分别是电压相关的开启和关闭速率。它处于开启和关闭速率,其中激活变量和失活变量之间出现差异。激活变量的电压依赖性与失活变量的电压依赖性相反。这将在下面变得明显。将(11)写成是有益的
c c -=∞dc c τ(12)有
c βατ+=
c c 1(13)是电压相关的时间常数和
c c
βαα+=∞c c (14)
是电压相关的稳态功能。稳态函数模拟(in)激活变量c 的长期行为,其来自事实,如果
0dc →dt
,∞→c c 某些离子的激活可能比其他离子的激活快得多,在这种情况下,激活变量被稳态函数代替,以简化和减少普通的非等式方程组。与膜电导中的(in)激活变量的指数一样,选择开启和关闭速率函数以得到实验数据。这是霍奇金和赫胥黎在诺贝尔奖得主鱿鱼轴突模型中首次完成的。在他们的模型中,钠电导写成
h
m g Na Na 3g = m 和h 分别是激活和失活变量。函数
1]10/)25exp[()
25(1.0m -++=
V V α)
18exp(4m V =β
)
20(exp 07.0h V =α1
]10/)30exp[(1
h ++=V β不是实验数据来模拟开盘价和收盘价。可以看出,开启和关闭速率的电压依赖性确实与激活和失活变量相反。
2.3两室隔神经元
如上所述,具有两个隔室的神经元的建模在一个隔室模型中比在生理上更合理。在我们的神经元模型中,一个隔室将模拟体细胞,而第二个隔室将是树突的非常基本的模型。树突被建模为与躯体耦合的单个隔室。这是可以捕获树突空间范围的最简单模型。单独的隔室允许枝晶具有可以转移的胞体,这是神经元的一个基本特征,在一个隔室模型中被忽略。
图5:两室神经元的示意图。体细胞和树突通过参数C g 耦合,参数C g 充当两个隔室之间的导电性。箭头表示电流和它们所处的方向。电流包括外部施加的电流app I ,由钠离子和钾离子ion I 产生的电流,漏电流L I 和D I ,以及从树枝状晶体进入体细胞的电流,反之亦然,s I /d .
体细胞室将模拟穿过胞体细胞膜的潜在差异,并包含离子动力学。特别是,我们模拟了细胞膜上钠离子和钾离子的扩散。为了激发离子扩散,我们添加外部施加的电流app I 。我们还包括一个被动泄漏电流L I ,它可以使躯体电位达到其自然平衡电位。最后,我们添加当前的s I /d ,它模拟从树枝到躯体的电流流量,反之亦然。这种电流在一个隔室模型中不存在,因为体细胞和树突被组合在一起形成具有相同电压的单个隔室。树突状隔室负责模拟树突细胞膜的潜在差异。我们假设树枝状隔室是“泄漏的”,因此我们包括被动泄漏电流ID,其用于与体细胞室中的泄漏电流相同的目的。此外,我们包括与体细胞隔室中相同的电流Id =s。但是切换标志以确保该术语在体细胞和树突室上具有相反的作用。神经元模型中的电流可以总结在图5中。两个隔间的状态方程采用一般形式
app s I I I C +=/d L ion S -I --dt
dV (15)
s D I I C /d D -dt dV +=(16)
3多房室模型
3.1多房室
处理复杂的树突结构的一个有效方法是房室逼近。这里把树突树分为连在一起的几个小片段或说是房室。例子如图3.1所示。每个房室都被假设是等势的而且空间上属性处处相同。电压的不同和膜属性的不一致,包括直径,发生在房室之间而不是在它们内部。作为一个简单的例子,考虑图所示的二房室模型。图所示的是这个模型的等效电路。每个房室都被看成等势的、半径为i a 、长度为i L 的泵体。令i V 为第i 个房室的膜电位,,i i M c r 分别对应比膜电容和比膜电阻。我们假
设每个房室都有电极电流,总的电极电流为i electrode i 。最后,假设细胞内,或说纵
向的电阻为L r 。
现在每个房室的电容电流与离子电流一定和纵向电流与电极电流平衡。也就是,
i i i i cap ion long electrode i i i i +=+(3.1)
其中i cap i 和i ion i 是房室i 的膜的每单位面积的电容电流和离子电流。如前所述,
i i cap i dV i c dt =和i i i ion M v i r =(3.2)
假设静息电位为0。为了计算出i long i ,我们需要确定总的轴电阻。注意两个房室的
中心之间的总电阻仅仅是那两个将房室中心分开的半泵体的电阻之和。也就是总电阻为:
122212
22L L long r L r L R a a ππ=+(3.3)用欧姆定律,我们可以将房室i到j的电流的表达式写成11,221()long i g V V =-和22,112()long i g V V =-(3.4)
耦合项1,2g 和2,1g 是将(3.3)倒置后除以有效的房室的表面积得到的。也就是
2121,222121122212,12212112()
()
L L a a g r L a L a L a a g r L a L a L =+=+最后,为了计算i electrode i ,我们用房室的表面积除总的电极电流。也就是,
i i electrode electrode i
I i A =其中,2i i i A a L π=是房室i的表面积。综合以上,可以找到两个相连泵体的方程是
1211111,2211
22222,1122()()electrode m electrode m I dV V c g V V dt r A I dV V c g V V dt r A +=-++=-+(3.5)
如果不使用电导,i j g ,我们可以用11,21/r g =和22,11/r g =,那么我们可以写成这样的体系:
1211211
1122122
22()()m m dV V V V c i dt r r dV V V V c i dt r r -+=+-+=+(3.6)其中i electrode i i I i A =。现在我们可以探究这两个房室对“细胞”输入电阻的作用了。假设我们只对细胞1注入电流。而且,每个泵体的长度和半径都是相同的。那么12r r r =≡。源于耦合的输入电阻是多少呢?为了解决这个问题,我们一定得计算耦合引起的稳定状态的电位。不失一般性地,定义12M M M r r r ==。只用简单的代数就可以知道
11()
/2M M M
r r r V i r r +=+因此耦合的和非耦合的输入电阻的比率为12inputcoupled M inputuncoupled m R r R r r =-
+也就是,输入电阻减少了。为了得到相同的电位增长量,该耦合系统所需的电流比非耦合系统要多,因为一些电流被第二个房室消耗了。
用相似的方法,我们可以导出通常的树状结构的房室模型。计算正确的方程的一般法则是:
●对每个半径为j a 、长度为j L 泵体j ,单位为微米,计算表面积2j j j A a L π=,轴电阻因子:2j
j j L Q a π=。
●膜电容为810j j j C c A -=?,膜电阻为8(/)10j j
m j R r A =?。●房室j 和k 直接的耦合电阻为4()102
L jk
j k r R Q Q =+?。●方程是j j
k j
j j
k j j jk dV V V V C I dt R R -=-++∑到810±和410是微米到厘米的转换因数。譬如,考虑一个两房室的模型(i)房室1长200,半径30,房室长为20,半径20。那么,71 2.6510R =?Ω,101 3.7710C F -=?,82 3.9810R =?Ω,112 2.5210C F -=?,44.3410long R =?Ω,因此
1212122110611(),109181()dV dV V V V V V V dt dt
=-+-=-+-其中时间为单位为毫秒,耦合系数是无维的。注意耦合强度比如何与面积比的倒数相同。越大的房室对小的房室的作用比反过来的要大得多。
图 3.1.A.为了建模的需要将多枝的树突转换为一系列泵体。B.简单的3房室模型
特别提醒,大多数房室模型所使用的标准单位对电容,电导,外加电流分别是2/F cm μ,2/mS cm 和2/A cm μ。实验者一般不知道电流密度而只知道总的注入电流。通常注入细胞的电流的数量级一般比毫培要小。
为了产生任意房室模型,只需计算长度,直径,和组成树突树的泵体的连接。软件NEURON使实验者可以输入神经元的数字化图像,然后这个程序通过连接很多个泵体,自动产生该神经元的房室模型。因此,胞体动作电位在适宜条件下可触发一个脉冲串归因于其与树突的相互作用模型研究表明,利用一个简化的两房室神经元模型可得到胞体与树突之间的运种相互作用,关键取决于两个房室之间的禪合系数。由树突形态和分布及树突电压口控通道和突触活动的特性,从而,仅靠简单改变树突的属性,神经元的的放电模式可能调整。胞体与树突响应之间的相互作用可计算,作为一个斜率检波器,或者感觉系统中的特性检测.突触输入的放大。在突触输入传向胞体的进程中被动树突减弱突触输入,基于一事实,研究者提出其他机制,包括突出整合,有效赋予每个突触等量。树突民主由于补偿机制的存在与否引发有关神经功能的根本不同的见解,解决运些不同机制在各种神经类型中的重要性。
四个主要机制
我们简要概述各种情况并提供实验证据。提出下四个主要机制:突触缩放:在此情形中,为了均衡远端树突的效能,其电导根据该树突离胞体的距离相应调节。起初,运种"突触民主"机制的间接证据在运动神经元中发现近来更多支持来自海马CA1锥体神经元的研究P气然而由于其他主要神经元类型并不遵循运一规律,运种机制不具有一般性阔下助推;内向电压依赖型树突电流可在突触输入传向胞体途中
增强该输入,从而补偿其衰减。尽管明确存在树突电流支持运种情况关于运种助推是否起重要作用及其是否源于树突或胞体电流,存在矛盾的实验证据.局部树突锋:克服树突衰减的一个强大机制是利用突触输入共激活触发局部树突锋.触发运样的锋所需的再生内向电流可能由电压口控钢通道,电压口控巧通道,或突触激活的N-甲基-D-天口冬氨酸受体通道提供.
树突计算的实例
在前面章节中,我们对树突的被动和主动属性可赋予它们计算功能进行描述.可能的次线性求和实际上可能是有利的.它还对输入饱和提供了一种机制,从而防止由一群突触引起的神经元过度兴奋.兴奋性突触与分流抑制之间的非线性相互作用尤为突出.分流抑制通常刻画抑制,当其自身激活时,改变膜总电导,但不引起任何电压变化.在运种情况下,把抑制看作是减少细胞的输入电阻是很方便的,其有效降低对兴奋电流的电压响应.抑制属性可用数学描述为对兴奋信号产生分裂效应位数图中的简单算术运算提供了一种机制Rail最先认识到运种相互作用的有效性具有很强的空间构件.当兴奋性的和抑制性的输入彼此广泛分开在不同树突分枝上,那么到达胞体时运些输入会趋于线性和.与此相反,当兴奋性的和抑制性的输入位于彼此邻近处,那么抑制可产生兴奋输入的高度非线性。近期实验研究表明抑制作用可定位在一个单个树突分枝.理论研究表明,当抑制位于兴奋输入与胞体之间的路径上时,运种抑制也是有效的气因此,突触抑制相对兴奋的位置,决定其是否抑制优先抵消一组具体的(邻近的)兴奋性突触,或是否它对全组兴奋性突触起作用.尽管抑制表现为分级形式,根据预测,突触抑制可有效禁止兴奋信号,取决于抑制电导的位置与强度.例如,相邻一对兴奋和抑制输入联合运行的结果会导致胞体去极化当且仅当有兴奋输入ANDFNOT抑制性输入的活动.运个ANDFNOT函数是一个布尔逻辑运算,现代计算机执行的和数学计算理论中研究的正是运个.树突是否真正实现一个布尔口控网络尚不清楚,但正是运种形式体系是深入理解树突计算所需的,即一个正式的数学实体将阐明树突执行的操作.Koch等人巧妙展示了逻辑运算,可联系到生理学家利用不那么正式的计算概念设计了视网膜神经节神经元模型,其对移动的视觉输入有方向选择性.由于树突树的分叉点可看作是各分枝电流的流入,每个树突树可被看作是许多逻辑口控的合并,从而整个树突可实现复杂的功能.需要注意的是,运种机制实现的一个关键问题是恰当突触对恰当树突的寻址.事实上,一般情况下,如下文所见,利用局部非线性机制的任何计算必然要求相关突触输入对树突相关位置的树突计算的能力是否可W自己为在恰当位置的突触输入提供一个约束,及运种访址是否确实作为大脑中的一种基本现象发生目前尚不清楚.
主树突的计算树突兴奋性作为反馈机制
以解剖观察为基础,Cabal建立了动态极化法则,该法则要求信息在神经系统中单向流动:从树突,经胞体,到达轴突.在过去的二十年中,运个法则变得更清晰,许多类型的神经元,其树突上存在兴奋性离子电流,它们维持树突的动作电位沿相反的方向传播,从胞体到树突运意味着神经元不再是一个开环系统,而是有一个内部反馈机制,所计算运种"反向传播"有很重要的影响.因此,反馈不再是网络仅有的性质,它是网络中每个元素的一种显著属性.此外,通过反向传播动作电位的反馈传导是高度复杂的,且对树突功能及树突可塑性有很多重要影响.
树突计算
大脑中的一个具体神经元接收到成千上万的突触输入,但多数神经元只有一个负责输出信号的轴突.因此最终转化相当于压缩为一个小得多的信息量.因为有太
多输入,运种转化的一个基本特征是大量的输入信息必须经由神经元整合.在过去十多年中,出现越来越多的研究来探讨树突信号机制,最近的几篇综述已经深入讨论了运些研究结果气本节重点确定树突可作为计算的独特机制,并对树突的电压依赖性通道进行回顾,得出树突在神经计算中的作用.
被动树突的计算
尽管树突天生具有丰富的电压依赖型离子电流,但树突树的被动属性为树突内的电信号提供了支柱,认识到运一点是非常重要.例如,树突尖锋的初始阔值在某种程度上取决于钢通道的有效性,但也许更多地来自周围树突的被动加载,运决定有多少输入电流将去极化膜和有多少会轴向流到其他树突P气因此,理解树突树的被动属性仍是理解树突树中计算的关键.除了它们对主动树突信号条件的调节作用外,树突的被动属性靠自身能力提供计算功能,讨论如下.通过树突过滤的延迟线.在信号传播方面,树突表现的像绝缘性一般的电缆.同样化当输入信号传播到发起位点化被动树突线性过滤该信号,与阔值比轮运种过滤常常减弱树突信号,被认为是信号传播距离与初始信号频率的函数.因此,当起源于树突的一个短暂而尖锐的兴奋性突触后电位胞体时将会转变成一个更小更广泛的信号.结果,突触活动的锋值时间及由此产生输出锋的延迟依赖于突触在树突树中的位置.Rall 认为可利用该性质执行简单计算.首先,对单个输入,通过延迟线的作用,利用产生输出锋的延迟,树突可在树突树的不同区域"输入.事实上,与不同胞体形态组合有可能不同方式影响胞体,输出其次,对多个输入,胞体电压响应的时间历程取决于树突突触激活的时间,并行处理与局部计算.突触输入到树突,不仅注入电流,而且局部改变某些离子的膜电导.如果多个输入在时间和空间上共存,就引起它们之间的非线性相互作用.当相近的两个兴奋性输入同时活动时,各自去极化膜并减弱对另一个输入的驱动力.因此,从理论上讲,对同步行为的响应小于对单个响应的和在运个意义下,树突可能是有益的,因为它们使输入的空间分离,尽量减少它们的相互作用.但是在某些情况下,运个键的问题是,大脑是否利用运些基本单位来执行计算.直接证明一个特定的计算策略是必须且足解释网络的计算行为是非常困难的.然而,存在有利的实例为树突计算在神经网络执行的计算中起着关键且可能必须的作用提供了强有力的间接证据.
方向选择性
在单个细胞水平上的计算,研究的最广泛的是方向选择性.方向选择性神经元对偏爱的最优方向上的图像移动做出响应,但对相反的NULL方向上的移动无响应.从苍蛹的眼睛到哺乳动物的皮层,在很多物种身上都可发现方向选择性,并在所有运些情况下,树突状计算的作用已被提出.在方向选择性的研究方面,Rall为树突如何实现方向选择性单兀提供了首个模型.随后Barlow和Levick描述了视网膜神经节细胞的方向选择性,在1982提出兴奋与抑制之间的非线性相互作用可解释视网膜神经节细胞的方向选择性.证明树突参与方向选择性的一个最有说服力的实验由Single和Borst在1998年提供。最近,Talor等人利用来自方向选择性视网膜神经节细胞的胞内记录证明存在抑制偏好转向NULL方向的不对称化证明在星爆型无长突细胞的单个树突分支上方向选择性可被计算.利用星爆型无长突细胞
树突尖端的+2a C浓度的双光子成像,Euler等证明星爆型无长突细胞树突尖端的
a C浓度确实具有方向选择性.似乎方向选择性确实是由星爆型无长突细胞的
2
+
单个树突计算的,但是其计算的机制尚不完全了解.另一个已被证明的树突对计
算做出贡献的的系统是声音定位系统听觉神经元的同时性检测仍在运个系统中,一种特殊类型的神经元负责计算到达两个耳朵的声音之间的时间差.每个神经元只响应一个非常精确的时间差,该时间差对应于空间的一个具体的位置.运类神经元只包含两个主要树突,每个树突只接收来自一只耳朵输入.输入被认为是运样一种方式排列,从一只耳朵到达的输入与从第二个到达的输入之间有一个恒定的延迟.来自两只耳朵的同时输入到达两个树突在胞体相加并引起神经元发出一个动作电位.然而,当来自同一只耳朵的同步锋到达同一树突,它们的和是亚线性的,引发一个阔下响应.Rubel及其同事证明,神经元的首选频率。与树突长度之间存在逆相关,支持树突直接促成计算运一假设.运与模型一致,由于对高频输入树突过滤会造成异相的意外尖锋相加之后超过阔值.因此,在低频范围内的树突的优势在高频范围内变成负担,听觉同时性检测神经元最好去掉较短的树突.鉴于树突计算的重要性,下面我们介绍树突内电信号传播的Rall电缆模型,房室模型和树突检测。
4数值方法
关于动力学性质分析的方法,可以在分岔点使用它来推导出有关系统动力学的信息。然而,动力系统通常过于复杂,无法通过分析方式进行分岔分析。在某些情况下,无法通过分析找到平衡解,这是分叉分析的起点。因此,我们需要有效且准确的数值方法来寻找平衡解并检测当该平衡解在一个或多个参数中变化时可能发生的任何分叉。我们将首先讨论伪强度延续,这是一种有效的预测-校正方法,可用于跟踪当一个参数变化时平衡解如何演变。伪强度延续的思想构成了马鞍节点和Bogdanov-Takens分岔继续的基础,其中在两个或三个参数的变化下跟踪具有特殊性质的平衡解。
软件包
平衡解,马鞍节点分岔和Bogdanov-Takens分岔的延续只是数值分岔分析的一小部分。还有其他局部分叉的检测和延续,例如Hopf分叉。我们甚至没有提到的一个主题是定期解决方案的继续和检测它们的分叉。因此,如果有易于使用的软件包可以执行这种延续,那将是有用的。在本报告中,我们使用了两个这样的包; AUTO和MATCONT。AUTO是一种基于UNIX的软件包,采用C和Python编程语言实现。它可以继续并检测稳态平衡和周期解的一个分支。此外,AUTO允许继续具有无限周期的周期解。这种解决方案被称为同宿轨道。在继续同宿轨道的同时,AUTO 可以检测到几种类型的分叉,并允许这些分叉在两个或多个参数中继续。MATCONT 是一个用户友好的基于MATLAB的软件包,具有完整的图形用户界面。除了继续和检测一个分叉的共同维度之外,MATCONT还可以计算正规形式系数并检测更高的余维分岔,例如Bogdanov-Takens分岔。
分叉
在最近的更新版本中,MATCONT已经配备了很好的工具来分析同宿轨道及其分叉。我们首先解释神经元的两个主要状态;一个状态是静止状态,另一个状态是重复发射状态。本节后面是对神经元模型进行分叉分析得到的结果。我们首先展示了没有树枝状影响的分叉结构,然后展示了具有树枝状影响的新分叉结构。我们比较和讨论这些变化,然后展示如何使用更高维的分叉图来解释发生的动态过渡。神经元行为在进行分叉分析之前,讨论我们的模型神经元可以存在的状态是有用的。其中一种状态是静止状态,其中跨细胞膜的电位差去极化(变得不那么负),
直到达到阈值电位并且发生动作电位。回想一下,动作电位是膜电位的大幅增加。在此动作之后,电位是大的超极化,其中膜电位变得非常负。然后神经元慢慢恢复并处于平衡电位。神经元可以存在的第二状态是重复发射状态。不是神经元恢复到平衡电位,而是有足够的电流注入到体内,电势连续地去极化到阈值电位以上,产生多个动作电位和超极化。都是使用MATLAB计算的神经元方程的数值解。在经过一段时间后,有平衡势的数学类比或重复点火。在静止神经元中接近的平衡电位对应于神经元方程的稳定稳态解。因为它是稳定的,如果解从平衡值扰动,它将返回到平衡值。更具体地说,该解决方案正在吸引人。这解释了为什么体电位最终接近该平衡电压。重复点火状态可以被认为是稳定的周期解。周期性解决方案与稳态解决方案根本不同。稳态解决方案是单个值,而周期性解决方案永远循环使用相同的值。经过一段时间后,体细胞电位循环通过相同的值。与稳态解决方案一样,周期解决方案可以是稳定的或不稳定的,并且可以吸引(或排斥)其他解决方案。当有足够的电流注入到体内以使膜电位去极化超过尖峰阈值而不是缓慢恢复到平衡电压时,发生重复的发生。因此,如果施加的电流量增加,神经元应该从静止状态变为重复的环状态。这确实是在实验和我们的神经元模型中发生的事情。利用这些信息,可以合理地预期存在施加电流的临界值,其中生理和数学神经元都经历从静止到重复的转变。神经元动力学中的这个临界值和转变对应于分叉。执行分叉分析将有助于确定该临界值及其对应的特定分叉。此外,分叉分析还可能揭示新神经元动力学的其他区域。
5参考文献
[1]Peter Dayan and L.F.Abbott.Theoretical Neuroscience.MIT Press, 2005.
[2]A.Dhooge,https://www.doczj.com/doc/223192489.html,aerts,and Yu.A.Kuznetsov.Matcont:A matlab package for numerical bifurcation analysis of odes.ACM Transactions on Mathematical Software,
2003.
[3]E.J.Doedel and J.P.Kernevez.Software for Continuation Problems in Ordinary Di?erential Equations with Applications.Caltech Preprint.
[4]Willy https://www.doczj.com/doc/223192489.html,aerts.Numerical Methods for Bifurcations of Dynamical Equilibria.Society for Industrial and Applied Mathematics,2000.
[5]A.L.Hodgkin.The local electric changes associated with repetitive action in a nonmedullated axon.Journal of Physiology,1948.
[6]A.L.Hodgkin and A.F.Huxley.A quantitative description of membrane current and its application to conduction and excitation in nerve.Journal of Physiology,1952.
[7]James Keener and James Sneyd.Mathematical Physiology.Springer Science+Business Media Inc.,1998.
[8]Yu. A.Kuznetsov.Elements of Applied Bifurcation Theory. Springer-Verlag,NY,2nd
edition,1998.
[9]Yu. A.Kuznetsov.Practical computation of normal forms on center manifolds at degenerate Bogdanov-Takens bifurcations.International Journal of Bifurcation and Chaos,
2004.
[10]John Rinzel and Bard Ermentrout.Analysis of Neural Excitability and Oscillations,
chapter7,pages251.
Xiao-Jing Wang and Gyorgy Buzsaki.Gamma oscillation by synaptic inhibition in a hippocampal interneuronal network model.The Journal of Neuroscience,1996.
[12]S.Wiggins.Indroduction to Applied Nonlinear Dynamical Systems and Chaos.Springer-Verlag,NY,1990.
最简单的房室模型是一房室模型。用一房室模型意味着将机体看成一个动力学单元,它适用于给药以后药物瞬即分布到血液、其它体液及各器官组织中,并达成动态平衡的情况。二房室模型是从动力学角度把机体设想为两部分,分别称为中央室和周边室。中央室一般包括血液及血流丰富的组织(如心、肝、肾、肺、脑、消化器官等),周边室一般指血流供应少,药物不易进入的组织(如肌肉、皮肤、脂肪、毛发等)。尽管经典房室模型在临床中已有广泛的应用,但是这种模型并不能描述组织间浓度差异较大的生理系统。对药理活性不高的药物而言,可以忽略房室之间的差异,但是对于具有高亲和力的药物,或对于某些组织具有毒性,有特殊的目标器官的药物,经典的房室模型就无法描述这种特殊的现象[1]。经典房室模型还存在着一些明显的缺点,如:分析结果依赖于房室模型的选择,而房室模型的选择带有一定的不确定性。同一种药物可用不同的房室模型来解释,相应的参数可以显著不同。因而,要判断哪一个模型最适宜,有时是困难的,甚至是不可能的。为了克服经典房室模型的缺点,近年来药物动力学研究继经典房室模型之后又提出了生理房室模型[2]。生理房室模型简称生理模型,是一种整体模型。它是根据生理学、生物化学和机体解剖学的知识,模拟机体循环系统的血液流向并将各器官或组织相互联结。每一房室代表一种或一组特殊器官或组织,每一器官或组织(房室)在实际血流速率和组织/血液分配系数以及药物性质的控制下遵循物质平衡原理进行药物运转。因此,生理模型可描述任何器官或组织内药物浓度的经时变化,以提供药物体内分布的资料,并可以模拟肝、肾等代谢、排泄功能,提供药物体内生物转化的资料,从而得到药物对靶器官作用的信息,有助于药物作用机理的探讨。依据生理房室模型药物动力学,通过模拟可以验证、补充和预测体内药量的经时变化规律。对新药研究开发、临床药物治疗均有理论指导意义和实用价值。 药动学通常用房室模拟人体,只要体内某些部位接受或消除药物的速率相似,即可归入一个房室。房室模型仅是进行药动学分析的一种抽象概念,并不一定代表某一特定解剖部位。把机体划分为一个或多个独立单元,可对药物在体内吸收、分布、消除的特性作出模式图,以建立数学模型,揭示其动态变化规律。 1,假设机体给药后,药物立即在全身各部位达到动态平衡,这时把整个机体视为一个房室,称为一室模型或单室模型。 2,假设药物进入机体后,瞬时就可在血液供应丰富的组织(如血液、肝、肾等)分布达到动态平衡,然后再在血液供应较少或血流较慢的组织(如脂肪、皮肤、骨骼等)分布达到动态平衡,此时可把这些组织分别称为中央室和周边室,即二室模型。 多数情况下二室模型能够准确地反映药物的体内过程特征,但一房室模型虽然准确性稍差,却比较简单,便于理解、推广、应用,且有些药物用单室模型处理已能满足要求,所以其重要性并不亚于二室模型。 第二章.目前的主要研究现状以及相应的文献、使用的方法和结论
国内物流需求预测方法文献综述 (河北工程大学管理科学与工程阮俊虎) 物流需求是指一定时期内社会经济活动对生产、流通、消费领域的原材料、半成品和成品、商品以及废旧物品、废旧材料等的配置作用而产生的对物在空间、时间和费用方面的要求,涉及运输、库存、包装、装卸搬运、流通加工以及与之相关的信息需求等物流活动的诸方面[1]。物流需求的度量可以采用价值量和实物量两种度量体系。实物量意义上的物流需求主要表现为不同环节和功能的具体作业量,如货运量、库存量、加工量、配送量等;价值量意义上的物流需求是所有物流环节全部服务价值构成的综合反映,如物流成本、物流收入、供应链增值等[2]。 物流需求预测是根据物流市场过去和现在的需求状况,以及影响物流市场需求变化的因素之间的关系,利用一定的判断、技术方法和模型,对物流需求的变化及发展趋势进行预测。国内外许多专家和学者都对物流需求的预测进行了研究,提出不同的预测方法和手段。物流预测方法可以分为定性预测方法(如德尔菲法和业务人员评估法等)和定量预测方法,但多数是定量预测方法,因此,本文主要是对国内物流需求定量预测方法进行综述,归为时间序列预测方法、因果关系预测方法、组合预测方法等三类。 1.时间序列预测方法综述 时间序列预测方法是依据从历史数据组成的时间序列中找出预测对象的发展变化规律,以此作为预测依据。常用的时间序列预测模型有增长率法、移动平均法、指数平滑法、随机时间序列模型、灰色模型、以及在经济领域已经被广泛应用的混沌与分形等。 增长率法指根据预测对象在过去的统计期内的平均增长率,类推未来某期预测值的一种简便算法。该预测方法一般用于增长率变化不大,或预计过去的增长趋势在预测期内仍将继续的场合。刘劲等[3](2002)在利用增长率系数法对百色地区港口货运量进行了逐一分析。 移动平均法是用一组最近的实际数据值来预测未来一期或几期内产品的需求量的一种常用方法。当产品需求既不快速增长也不快速下降,且不存在季节性因素时,移动平均法能有效地消除预测中的随机波动。根据预测时使用的各元素的权重不同,移动平均法可以分为:简单移动平均和加权移动平均。杨荣英等[4](2001)在讨论移动平均值的基础上,提出了移动平均线方法,并介绍了运用移动平均线进行物流预测的方法。李海建等[5](2003)利用二次移动平均线模型对芜湖市物流业发展的规模进行了预测。 指数平滑法是在移动平均法基础上发展起来的一种时间序列分析预测法,它是通过计算指数平滑值,配合一定的时间序列预测模型对现象的未来进行预测。其原理是任一期的指数平滑值都是本期实际观察值与前一期指数平滑值的加权平均。移动平均法则不考虑较远期的数据,并在加权移动平均法中给予近期资料更大的权重;而指数平滑法则兼容了全期平均和移动平均所长,不舍弃过去的数据,但是仅给予逐渐减弱的影响程度,即随着数据的远离,赋予逐渐收敛为零的权数。韦司滢等[6](1999)将指数平滑法等其他多种方法应用在三峡移民工程建材配送决策支持系统中。黄荣富等[7](2003)、
土的本构模型综述 1 土本构模型的研究内容 土体是天然地质材料的历史产物。土是一种复杂的多孔材料,在受到外部荷载作用后,其变形具有非线性、流变性、各向异性、剪胀性等特点。为了更好地描述土体的真实力学—变形特性,建立其应力应变和时间的关系,在各种试验和工程实践经验的基础上提出一种数学模型,即为土体的本构关系。自Roscoe等1958~1963年创建剑桥模型以来,各国学者相继提出了数百个土的本构模型,包括不考虑时间因素的线弹性模型、非线弹性模型、弹塑性模型和考虑时间因素的流变模型等。本文将结合土本构模型的研究进程,综合分析已建立的经典本构模型,指出各种模型的优缺点和适用性,并对土本构模型的未来研究趋势进行展望。 2 土的本构模型的研究进程 早期的土力学中的变形计算主要是基于线弹性理论的。在线弹性模型中,只需两个材料常数即可描述其应力应变关系,即E和v或K和G或λ和μ。其中邓肯张双曲线模型是研究最多、应用最广的非线弹性模型。20世纪50年代末~60年代初,土塑性力学的发展为土的本构模型的研究开辟了一条新的途径。Drucker等(1957年)提出在Mohr-Coulomb锥形屈服面上再加一组帽形屈服面,Roscoe等(1958年~1963年)建立了第一个土的本构模型——剑桥模型,标志着土的本构模型研究新阶段的开始。70年代到80年代,计算机技术的迅速发展推动了非线性力学理论、数值计算方法和土工试验的发展,为在岩土工程中进行非线性、非弹性数值分析提供了可能性,各国学者提出了上百种土的本构模型,包括考虑多重屈服面的弹塑性本构模型和考虑土的变形及内部应力调整的时间效应的粘弹塑性模型。此外,其他本构模型如土的结构性模型、内时本构模型等也是从不同角度描述土本构关系,有的学者则借用神经网络强大的自组织、自学习功能来反演土的本构关系。
中国证券市场股票价格预测模型综述 王 浩 (洛阳理工学院工程管理系,洛阳 471023)* 摘 要:中国金融市场的证券价格存在着可预测成分。现有的各种统计预测方法基本都可以归纳为时间关系模型和因果关系模型两大类,详细分析了各种模型的实现方法并总结了其特点。 关键词:预测;股票价格;统计模型;综述do:i 10.3969/j .issn .1000-5757.2009.07.058 中图分类号:F830191 文献标志码:A 文章编号:1000-5757(2009)07-0058-03 一、证券市场可预测性 有效市场理论指出,证券价格呈现随机游走特征,因此技术分析和掷骰子选出的股票,最终表现相差无几。大量分析却发现中国股票价格波动具有长期记忆性,拒绝了随机游走假设,即股市涨跌存在自身的规律,无论长期和短期都存在着可预测的成分,因而技术分析是有用的,通过采用 相应策略,投资者可以获得超常利润。[1] 中国证券市场呈 现弱有效性的原因可能在于,作为一个新兴市场,法制、监管等因素造成市场信息传递效率低下,投资者在博弈中存在严重的信息和资金实力不对称,而且这种不对称状态并不能在市场中迅速消除,因此F a m a 所描述的概率上的/瞬时性0还无法达到,而这种市场结构的特点,使得某些/技术分析0成为信息挖掘的成本。 由于股票指数序列呈现高度的非线性,经典计量经济模型和时间序列模型的有效性受到了挑战。现代预测理论和统计学、信息技术、优化算法紧密结合,向复杂化和智能化方向发展。至少目前在我国,各种预测技术方兴未艾,投资者按照自己的经验采用各不相同的指标作为决策依据,在市场上低买高卖,获得了成功,也经历过失败。 二、主要预测模型1.神经网络模型 神经网络是一种大规模并行处理系统,具有良好的自学习能力、抗干扰能力和强大的非线性映射能力,能够从大量历史数据中进行聚类和学习,自动提取样本隐含的特征和规则,进而找到某些行为变化规律,可以实现任何复杂的因果关系。BP (反向传播)和RBF (径向基函数)神经网络是最常见的股市预测模型。崔建福等发现BP 模型普遍显著优于 GARCH (广义自回归条件异方差)模型,从而认为对股票价格这样波动频繁的时间序列,从非线性系统角度建模略胜于 从非平稳时间序列角度建模。[2] 由于传统算法收敛速度慢且 全局寻优能力差,更多研究将精力放在对神经网络结构和参数的改进上。丁雪梅等发现改进后BP 算法的预测结果比 回归预测、指数平滑预测和灰色预测都要好。 [3]神经网络预测方法的应用有两个明显特点。一方面,统计模式识别和数字信号处理等领域的特征选择和提取方法,如小波包最优分解方法、混沌吸引子理论、K a l m an 滤波算法、主成分分析、灰色系统理论,广泛用于神经网络输入参数的甄别。另一方面,新的网络模型不断被应用于证券预测实践以提高映射效率,如模糊神经网络和小波神经网络。预测结果明显优于普通神经网络模型。 神经网络的缺陷在于,网络结构只能事先指定或应用启发式算法在训练过程中寻找,需要在充分了解待解决问题的基础上,主要依靠个人经验来确定,没有统一的规范,往往需要通过反复改进和试验,最终才能选出一个相对较好的设计方案,并且网络训练过程易陷入局部极小点。不过,神经网络最致命缺点在于,无法表达和分析预测系统的输入输出之间的关系,难以解释系统输出结果。 2.灰色系统和随机过程模型 灰色预测普遍采用灰色系统模型,经由累加过程削弱原始数据的随机干扰,突出系统所蕴涵的内在规律,然后建立动态预测模型。马尔可夫过程是无后效性的随机过程,是一种应用极为广泛的传统方法。灰色系统GM (1,1)模型的解为指数型曲线,几何图形较为平滑,比较适用于具有增长趋势的问题,而对随机性波动较大的数据进行预测,会 58 第25卷 第7期V o.l 25 四川教育学院学报 J OURNAL OF S I CHUAN C O LLEG E OF EDU CAT I ON 2009年7月 Ju.l 2009 * 收稿日期:2009-02-23 作者简介:王浩(1973)),男,河南西峡人,副教授,硕士,研究方向:区域经济发展理论与数量分析。
常用土体本构模型及其特点小结 山中一草线弹性模型 线弹性模型遵从虎克定律,只有2个参数,即弹性模量E和泊松比V,它是最简单的应力-应变关系,但无法描述土的很多特征,主要应用于早期的有限元分析及解析方法中,可用来近似模拟较硬的材料如岩土。 Duncan-Chang( DC 模型 DC模型是一种非线性弹性模型,它用双曲线来模拟土的三轴排水试验的应力-应变关系(图1)。它侧重于刻画土体应力-应变曲线非线性的简单特征,通过弹性参数的调整来近似地考虑土体的塑性变形。但所用的理论仍然是弹性理论而没有涉及到任何塑性理论,故仍不能反映如应力路径对变形的影响、土体的剪胀特性和球应力对剪应变的影响等土体的很多重要性质。由于DC模型是在二为常 数的常规三轴试验基础上提出的,比较适用于围压不变或变化不大、轴压增大的情况,如模拟土石坝和路堤的填筑。 图】IK模型关于三轴试验的应力-应变关系Fig.l Duncan-Chang approxiniathm of the siress-strain rd nt kinship Ln ft standard drained triAxt*! te&l Mohr-Coulomb (MC)模型 MC模型是一种弹-理想塑性模型,它综合了胡克定律和Coulomb破坏准则。有5个参数,即控制弹性行为的2个参数:弹性模量E和泊松比v及控制塑性行为的3个参数:有效黏聚力c、有效内摩擦角和剪胀角。MC模型采用了弹塑性理论,能较好地描述土体的破坏行为但却认为土体在达到抗剪强度之前的应力-应变关系符合胡克定律,因而并不能较好地描述土体在破坏之前的变形行为,且不能考虑应力历史的影响及区分加荷和卸荷。故MC模型能较好地模拟土体的强度问题,MC模型的六凌锥形屈服面(图2)与土样真三轴试验的应力组合形成的屈服面吻合得较好,因此MC模型适合于低坝、边坡等稳定性问题的分析。
自适应PID控制 摘要:自适应PID控制是一门发展得十分活跃控制理论与技术,是自适应控制理论的一个重要组成部分,本文简要回顾PID控制器的发展历程,对自适应PID控制的主要分支进行归类,介绍和评述了一些有代表性的算法。 关键词:PID控制,自适应,模糊控制,遗传算法。 Abstract: The adaptive PID control is a very active developed control theory and technology and is an important part of adaptive control theory.This paper briefly reviews the development process PID controller.For adaptive PID control of the main branches, the paper classifies,introduces and reviews some representative algorithms. Keywords: PID control, adaptive, fuzzy control, genetic algorithm 1 引言 从问世至今已历经半个世纪的PID控制器广泛地应用于冶金、机械、化工、热工、轻工、电化等工业过程控制之中,PID控制也是迄今为止最通用的控制方法, PID控制是最早发展起来的控制策略之一,因为他所涉及的设计算法和控制结构都很简单,并且十分适用于工程应用背景,所以工业界实际应用中PID 控制器是应用最广泛的一种控制策略(至今在全世界过程控制中用的80% 以上仍是纯PID调节器,若改进型包含在内则超过90%)。由于实际工业生产过程往往具有非线性和时变不确定性,应用常规PID控制器不能达到理想控制效果,长期以来人们一直寻求PID控制器参数的自动整定技术,以适应复杂的工况和高指标的控制要求。随着微机处理技术和现代控制理论诸如自适应控制、最优控制、预测控制、鲁棒控制、智能控制等控制策略引入到PID控制中,出现了许多新型PID控制器。人们把专家系统、模糊控制、神经网络等理论整合到PID控制器中,这样既保持了PID控制器的结构简单、适用性强和整定方便等优点,又通过先进控制技术在线调整PID控制器的参数,以适应被控对象特性的变化。 2 自适应PID控制概念及发展 2.1 PID控制器 常规PID控制系统原理框图如下图所示,系统由模拟PID控制器和被控对象组成。
《软土地基》课程论文 学院建工学院 姓名王洋 学号
软土本构模型综述 1 引言 土体具有复杂的变形特征,如剪胀性、各向异性、受应力路径影响等。土体变形的这种复杂性是在复杂受力状态下表现出来的。复杂应力状态存在 6 个应力分量,也有 6 个应变分量。其间的关系是一种多因素物理量与多因素物理量之间的关系,不能由试验直接建立。须在简化条件的试验基础上,做某些假定及合乎规律的推理,从而提出某种计算方法,把应力应变关系推广到复杂应力状态。这种计算方法叫本构模型。 1.1 土的本构模型 发展到现在,土的本构模型数目众多,大致可以分为以下几大类: ( 1) 非线性模型; ( 2) 弹塑性模型; ( 3) 粘弹塑性模型; ( 4) 结构性模型。 对于软土而言,比较适用的一般为弹塑性模型。弹塑性模型是把总的变形分成弹性变形和塑性变形两部分,用虎克定律计算弹性变形部分,用塑性理论来解塑性变形部分。 1.2 变形假定 对于塑性变形,要作三方面的假定: ( 1) 破坏准则和屈服准则; ( 2) 硬化准则; ( 3) 流动法则。 不同的弹塑性模型,这三个假定的具体形式也不同。最常用的弹塑性模型为剑桥模型及其扩展模型。 2 剑桥模型与修正剑桥模型 1958 年,Roscoe 等发现了散粒体材料在孔隙比-平均有效应力-剪应力的三维空间里存在状态面的事实,1963 年,提出了著名的剑桥模型,1968 年,
形成了以状态面理论为基础的剑桥模型的完整理论体系。 Roscoe 等人将“帽子”屈服准则、正交流动准则和加工硬化规律系统地应用于Cam 模型之中,并提出了临界状态线、状态边界面、弹性墙等一系列物理概念,构成了第一个比较完整的土塑性模型。剑桥模型又被称为临界状态模型,是一个非常经典的弹塑性模型,它是第一个全面考虑重塑正常固结或弱超固结粘土的压硬性和剪胀性的模型,标志着土的本构理论发展新阶段的开始。 1968 年,Roscoe 等人在剑桥模型的基础上提出了修正剑桥模型,将原来的屈服面在p',q 平面上修正为椭圆,并认为在状态边界面内土体变形是完全弹性的。在状态边界面内,增加的剪应力虽不产生塑性体积变形,但可产生塑性剪切变形。修正剑桥模型是一种“帽子”型模型,在许多情况下能更好地反映土的变形特性。修正剑桥模型至今仍在工程中广泛应用,是因为它具有很多优点: 形式简单,模型参数少,参数确定方法简单( 只需常规三轴试验即可) ,参数有明确的物理意义,能够很好的反映重塑正常固结或弱超固结粘土的压硬性和剪缩性,因此修正剑桥模型是土力学中比较成熟而且应用广泛的弹塑性本构模型。同时,修正剑桥模型也有一定的局限性: 屈服面只是塑性体积应变的等值面,只采用塑性体积应变作硬化参量,因而没有充分考虑剪切变形; 只能反映土体剪缩,不能反映土体剪胀; 没有考虑土的结构性这一根本内在因素的影响; 假定的弹性墙内加载仍会产生塑性变形等。修正剑桥模型对实际情况进行了一系列假定: ①屈服只与应力球量p 和应力偏量q 两个应力分量有关,与第三应力不变量无关; ②采用塑性体应变硬化规律,以为硬化参数; ③假定塑性变形符合相关联的流动法则,即g( σ) = f( σ) ; ④假定变形消耗的功,即塑性功为: 剑桥模型是当前在土力学领域内应用最广的模型之一,其主要特点有: 基本概念明确; 较好地适宜于正常固结粘土和弱超固结粘土; 仅有3个参数,都可以通过常规三轴试验求出,在岩土工程实际工作中便于推广; 考虑了岩土材料静水压力屈服特性、剪缩性和压硬性。王清等分析了修正剑桥模型的应力应变关系,以其为基础引进了接触单元和杆单元,运用修正合格模型,用有限元程序模拟了
显式模型预测控制综述 亚历山德罗·阿莱西奥和阿尔贝托·本波拉德 摘要: 显式模型预测控制解决了模型预测控制的主要缺点,即需要解决在线的数学程序来估计控制动作。在一些文献中,这个估计阻止了MPC的应用,因为在采样时间内解决最优问题的计算技术比较困难或根本不可行,或者是计算机代码实现数值求解器时导致软件认证问题,尤其是存在安全性的关键问题。 显式MPC在给定的感兴趣的操作条件范围内允许其离线计算优化问题。显式MPC通过利用多参数的编程技术离线计算出的最优控制动作可以作为状态的显式功能和参考矢量,使上线操作简化为简单的函数求值。这样一个函数在大多数情况下是分段仿射的,所以MPC控制器可以映射成线性增益的查找表。 本文调查显式MPC在科学文献上的主要贡献。首先回顾基本概念和MPC 方案的问题,复习解决显式MPC问题的主要方法包括新颖而简单的次优实用方法以降低显式形式的复杂性。本文结尾评论了一些未来的研究方向。 关键词:模型预测控制,显式解,多参数编程,分段仿射控制器,混合系统,最小—最大控制。 1模型预测控制 模型预测控制的控制动作是通过解决在每个采样时刻的有限时域开环最优控制问题而得到的。每个优化产量的最优控制序列,只有第一步应用到过程中:在下个时间步长中,采用最新的可用状态信息作为最优控制新的初始状态通过偏移一个时间范围重复计算。因此,MPC也被成为后退或滚动时域控制。 该解决方案依赖于过程的动态模型,遵守所有的输入和输出(状态)的约束,
并优化其性能指标。这通常表示为一个二次或线性准则,因此,对于线性预测模型产生的优化问题可以转换为一个二次规划(QP )或线性规划 (LP ),而对于混合预测模型,所得到的优化问题可以转换为将在下一章节的讲述的混合整数二次或线性规划(MIQP/ MILP )。因此,MPC 和常规控制的主要区别在于,后者的控制函数在离线情况下预先计算的。MPC 在工业应用上的成功是由于其在处理有许多操纵的控制流程,控制变量及系统对它们的约束的能力。 过程控制通常是由差分方程的系统建模的 (1)((),())x t f x t u t += (1) 其中,()n x t ∈ 是状态矢量, ()m u t ∈ 是输入矢量。假设一个简单的(0,0)0f =, 控制和状态序列要满足的约束条件 ()x t ∈?,()u t μ∈ (2) m μ? ,n χ?在它们的内部封闭集包含原点。假设控制目标引导状态的起源, MPC 解决了如下的约束监管问题。假设在当前时刻t 的状态量x(t)的完整测量是可使用的,那么下面的有限视距优化监管问题可以解决。 1 0(()):min ((),())()N N z k x t l x k u k F xN -=P +∑ (3a) ..s t 1(,),0,...,1k k k x f x u k N +==- (3b) 0()x x t = (3c) ,0,...,1k U u k N μ∈=- (3d) ,1,...,1k x k N χ∈=- (3e) ,N N x χ∈ (3f) (),,...,1k k u u x k N N κ==- (3g) 其中,z ∈ 是优化变量的向量,01['...']'N z u u -=,u mN =(一般情况下,z 包括
土的本构关系 土体是天然地质材料的历史产物。土是一种复杂的多孔材料,在受到外界荷载作用后,其变形具有以下特性:①土体的变形具有明显的非线性,如:土体的压缩试验e~p 曲线、三轴剪切试验的应力—应变关系曲线、现场承载板试验所得的p~s曲线等; ②土体在剪切应力作用下会产生塑性应变,同时球应力也引起塑性应变; ③土体尤其是软粘土,具有十分明显的流变特性; ④由于土体的构造或沉积等原因,使土具有各向异性; ⑤紧砂、超固结粘土等在受剪后都表现出应变软化的特性; ⑥土体的变形与应力路径有关,证明不同的加载路径会出现较大的差别; ⑦剪胀性等。为了更好地描述土体的真实力学—变形特性,建立其应力、应变和时间的关系, 在各种试验和工程实践经验的基础上提出一种数学模型,即: 土体的本构关系。 自从Roscoe等人首次建立了剑桥模型以来, 土的本构关系的研究经历了一个蓬勃发展的 阶段, 出现了一些具有实用价值的本构模型。虽然很多的理论为建立土的本构关系提供了有力的工具, 但是由于土是一种三相体材料, 在性质上既不同于固体也不同于液体, 是介于两者 之间的特殊材料, 所以人们常借助于固体力学或流体力学理论, 同时结合工程实践经验来解 决土工问题, 从而研究土的本构关系形成了自己一套独特的方法—半理论半经验的方法。建立一个成功的本构关系关键有两点:第一要建立一个函数能较好地反映土在受力下的响应特征;第二要充分利用试验结果提供的数据比较容易地确定模型参数。模型都需要满足以下基本条件:(1)不违背更高一级的基本物理原理(如热力学第一、第二定律)。(2)建立在一定的力学理论基础之上(如弹性理论、塑性理论等)。(3)模型参数能够通过常规试验求取。从工程应用的角度出发,研究问题的精度就需要进行合理的控制,从而在计算精度与计算设备、计算难度、计算时间以及计算成本之间获得平衡。另外,任何理论、方法都应以实践应用为目的,这样才具有价值。综合上述两点,从工程应用的角度去分析各种土的本构关系是非常有必要的。本构关系是反映材料的力学性状的数学表达式,表示形式一般为应力-应变-强度-时间的关系。土的本构关系十分复杂,除受时间因素影响外,还受温度、湿度等因素影响。时间作为一个主要因素,主要是反映土的流变特性且在大多数情况下可以忽略其影响。同时,强度可以视为土体应力-应变发展的一个特殊阶段,即在发生很小的应力增量下,土体单元将发生无限大的变形。 对于一般的岩土工程问题,稳定问题是主要问题,如地基稳定问题、斜坡稳定问题等,一般采用极限平衡法对土体进行分析。这种分析不考虑土体破坏前的变形过程及变形量,只关心土体处于最后整体滑动时的状态及条件,实际上是刚塑性或理想塑性的理论。20 世纪50 年代末到60 年代初,由于高重土工构筑物、高层建筑以及许多大型建筑物的兴建,使土体变形问题成为主要矛盾。此外,随着计算手段、试验手段的提高,也极大地促进了本构关系的发展。 土的线弹性模型:经典土力学将土体视为理想弹性体,在进行变形计算时采用基于广义虎克定律的线性弹性模型,假定土体的应力和应变关系成正比,通过测定土在不排水条件下的弹性 模量E和泊松比μ,或者体积变形模量K和剪切模量G来描述其应力—应变关系。土的线弹性模型简单,适用于不排水、安全系数较大、土体不发生屈服的情况,工程中可用于:①计算地基中的垂直应力分布; ②计算地基在不排水加荷情况下的位移和沉降; ③基坑开挖问题计算,用于估计基坑在不排水条件下的侧向压力与侧向位移; ④计算软粘土地基在加荷不排水条件下的沉 降和孔隙水压力。 土的非线弹性模型:土体在外荷载作用下一般都要发生屈服,其应力—应变关系具有非线性,土体发生的变形既有弹性变形又有塑性变形,土的非线弹性模型可以较好地描述其变形特性。土的非线弹性模型理论可以分为三类:弹性模型、超弹性(Hyper Elastic)模型(又称Green超弹性模型)和次弹性(Hypo Elastic) 模型。其中影响最大、最具有代表性的主要是邓肯一张
房室模型的综述 1前言 神经系统可能是我们体内最复杂和最重要的系统。它负责传递有关肌肉运动和感官输入的信息,使我们能够与周围的世界互动并感知它们。神经系统主要由称为神经元的大量互连细胞网络组成。因此,对神经元的研究具有重要意义,因为了解神经元本身的性质有助于理解它们如何在更大的网络中协同工作。 1.1神经元解剖学 神经元可以分解为三个主要部分;躯体,树突和轴突。体细胞是神经元的主体,具有容纳细胞核的半透性细胞膜。树枝状结构形成一个巨大的树状结构,从躯体延伸出来。树突负责接收来自其他神经元的突触输入(神经递质)。神经元的轴突是长轴状结构,终止于轴突末端。轴突末端负责释放由其他神经元的树突所接收的神经递质。神经元图如图1所示。树突和轴突末端的大分支结构允许每个神经元与数千个其他神经元连接,形成大规模的通信网。神经元通过突触进行通信,突触由轴突终端中的电脉冲触发。轴突末端的电脉冲释放神经递质,该神经递质与另一神经元的树突上的受体位点结合。树突上的兴奋性神经递质的累积可以引起动作电位,这是跨细胞膜的电压的大的尖峰。该电脉冲可以沿树突移动到轴突终端,其中可以定位其他突触,允许信息在网络上传播。 1.2数学方法 为了捕获沿单个神经元的电脉冲传播的基本动态,可以使用数学方程。然而,神经元的复杂生理结构产生难以分析的方程式。跨越神经元细胞膜的潜在差异取决于空间和时间,因此生理上准确的神经元模型将受部分差异方程(PDE)控制。PDE难以通过分析和数值分析。为了克服这种困难,神经元可以通过称为区室化的过程离散化(图2)。当神经元被划分时,它被分解成称为隔室的不连续区段。 图1:神经元图。神经元的三个主要部分是体细胞,树突和轴突。 单个隔室没有空间依赖性,因此它们的电压仅取决于时间,这使得它们可以由普通的二元方程(ODE)控制。通常,对ODE系统的分析比PDE系统的分析容易得多。区室化过程允许使用空间独立的隔室对神经元进行建模。模型具有的隔室越多,其生理学上就越现实。然而,大隔室模型可能极难分析,因此可能难以揭
土的本构关系的综述 土的本构关系,即土的应力应变关系,是现代土力学的核心内容,也是有限元分析计算的基础。建立一个有效而经典的本构模型需要对土的基本特性透彻把握,并且可全局规划。同时,一个有效且经典本构模型还可以作为一个捷径让初学者逐步认识到土加载变形过程。而建立土的本构模型的核心问题就是通过土体在实验中所表现出的力学行为来反演其内在的本构关系。 从我们的认识基础之上,土体是天然地质材料的历史产物,还是一种复杂的多孔材料,当受到外界荷载作用后,其变形可归纳为下面几种特性:土体的变形具有明显的非线性;土体在剪切应力作用下会产生塑性应变,同时球应力也引起塑性应变;土体中特别是软黏土,具有十分明显的流变的特点;由于土体的构造或沉积等原因,使土具有各向异性;超固结黏土等在受剪后都表现出应变软化的特性;还有土体的变形与应力路径有关,证明不同的加载路径会出现较大的差别;土的剪胀性可以更好地描述土体的真实力学 - 变形特性,建立其应力、应变和时间的关系。 针对土这样一种多相离散、影响因素很复杂的材料,想去建立一种精确并且可面面俱到地反映每一因素的本构模型基本是做不到。在这种情况下,我们要抓住主要矛盾,应该考虑去建立可行的具有物理概念正确数学表达严密模型参数应用方便的本构模型。 其次,土本构模型的建立是一个重要而又复杂的问题,到目前为止,国内外学者们建立了很多模型,很多论文对这些模型进行了讲述。然而这些土本构模型的出发点都是在扰动土或砂土的基础上,它们难以描述在土的结构性作用下各种非线性行为,从而造成计算结果不正确,不贴和实际情况。天然土体一般都具有一定的结构性,所以有必要建立考虑土结构性影响的土本构模型。在此现实基础上,很多专家将土结构性影响特性纳入建立本构模型的因素中。 再者,随着 CT 技术、X 射线和光弹试验等在土体研究中的应用,从而使得我们对土体的宏观变形和微观规律有了更进一步的认识。在对土的结构性研究引起重视,建立了不少的模型研究成果表明:土的结构性对其压缩特性、强度包线特性等都有显著的影响在研究土体结构性模型的同时,不少专家结合其他理论建立了土体的损伤本构模型。在实际情况里,我们应针对具体工程做出选择。工程师们关心土体从加载直至破坏失稳的整个过程,那么初始模量、最终抗剪强度以及加载过程中的应力应变及体变规律三个要点都是需要考虑分析的,此时弹塑性模型将作为首要选择,要是着重考虑工程强度稳定性,本构模型对最终强度的体现是最重要的,可选取例如强调最终破坏剪应力的理想塑性模型; 或者是土的抗剪强度大于实际荷载远,我们可近似视认为变形是在弹性范围内的,随之应该选择弹性本构模型。 首先先阐明了应力应变性态的几种基本形式,如下图中所示。
预测控制文献综述 杭州电子科技大学信息工程院 毕业设计(论文)文献综述 毕业设计(论文)题目 文献综述题目 系 专业 姓名 班级学号指导教师 多变量解耦预测算法研究预测控制算法的研究自动控制系自动化蔡东东 08092811 08928106 左燕 预测控制算法的研究 1 引言 预测控制是源于工业过程控制的一类新型计算机控制算法。70年代后期, 它已应用于美法等国的工业过程控制领域中。1978 年,理查勒特 (Rchalet)等在文 献[1]中首次详细阐述了这类算法产生的动因、机理及其在工业过程中的应用效果,从此,预测控制 (Predictive Control)作为一种新型的计算机控制算法的统一名称, 便开始出 现在控制领域中。 预测控制作为一种复杂系统的控制策略和方法,有着强烈的应用背景,它所 具有的强鲁棒性已为大量的系统仿真和工业实践所证实。当对象参数未知时,通常采 用参数自适应算法来估计对象参数, 根据确定性等价原理,建立间接式的自适应广义预测 控制。然而,当被控对象具有未建模动态、参数时变、非线性及有界干扰时,这样建立的 自适应算法未必能使广义预测控制的强鲁棒性得到保持。为此,不少学者从不同的立足点 出发,开展了提高算法鲁棒性的研究。 由于实际的生产过程大多是复杂的动态过程,精确建模具有特殊的困难,因而,描述 对象的数学模型与实际对象特性之间不可避免地存在模型误差。尽管模型误差无法预知, 但根据它的历史数据,仍有可能用某些方法对未来时刻的模型失配作出某种预报,由此提 高输出预测的精度、改善算法的鲁棒性。文献[2]利用预测误差的历史数据建立误差预测 模型,通过误差预测修正输出预测。文献[3]则是将人工智能方法引入预测控制,在对实
麦克斯韦尔模型与开尔文模型综述 1弹性力学概念和流变学的两个基本模型 在流变学里,应变不与应力成简单的正比关系,这两者不是线性关系。在这里,表述应变、应力和时间三者关系的公式不再称为应力-应变关系,而称为“本构关系”。 马克斯威尔模型由一个弹性元件和一个流性元件串联组成,描述具有弹性又具有流性的材料。岩石在瞬间受力条件下具有弹性,在持久力作用下具有流性,恰好可用马克斯威尔模型描述。马克斯威尔粘弹性模型中的粘性元件采用了牛顿流体模型,即线性粘性流体。牛顿流体是指受应力时产生的流动速率与应力大小成正比的材料。表述为 σ=ηε(1) 式(1)中σ为应力,ε为应变(流动)速率,η为比例常数,流变学中称为粘性系数(模量)。式( 1)可与弹性力学中一维虎克定律的形式进行比较 σ=Eε(2) 式(2)中ε为应变,E为比例常数,又称杨氏模量。式( 2)表示材料的应变与应力成正比,与式( 1)的不同就在于应变速率ε上,其中包含着时间因素。 2 开尔文( Kelvin)模型简介 比马克斯威尔模型( 1868)晚几年,提出了开尔文模型( Kelvin ,1875)。与马克斯威尔模型不同,将弹性元件a和流性元件b不是串联,而是并联,就组成了开尔文模型,如图1所示。元件a 为弹簧,具有完全弹性,其应力应变关系符合虎克定律式( 2) ,在此可写为 σ (图1开尔文模型) a为弹性元件弹簧, b为流性元件有阻尼的唧筒, 两者并联,σ为应力 元件b符合牛顿流体条件,参照式(1)可写为σ=η ε由于是并联,所以两元件上应力之和应等于总应力σ ,有 σ= σ+σ=Eε+ηε σ=Eε+η ε(3) 式(3)为开尔文模型的本构关系,为深入了解开尔文模型的性质,给出一些特定情况来分析。 (1)第一种情况。我们给这个模型两端突然一个应力,例如拉应力,量值为σ并保持不变。模型的并联关系要求并联两元件的变形量要同步,弹性元件虽然有能力响应应力σ的作用,力图达到对应的应变值,但碍于流性元件的滞后性,必须跟随流性元件的缓慢速度使变形逐渐跟上来。这个过程的应力在初始时几乎全由流性元件承担,弹性元件只承担很小的应力,而随着应力保持的时间延续才逐渐增大,这样应力也逐渐由流性元件身上转移到弹性元件身上,最后
先进控制技术规律和方法综述 在实际的工业控制过程中,很多系统具有高度的非线性、多变量耦合性、不确定性、信息不完全性和大滞后等特性。对于这种系统很难获得精确的数学模型,并且常规的控制无法获得满意的控制效果。 面对这些复杂的工业控制产生了新的控制策略,即先进控制技术。先进控制技术包括:自适应控制,预测控制,推理控制,鲁棒控制以及包括模糊控制与神经网络在内的智能控制方法。本文详细介绍了自适应控制、预测控制以及这两种先进控制的应用领域和优缺点。 1.自适应控制 自适应控制的思想是对于系统中的不确定性,以及控制任务的艰巨性,对于部分未建模的动态特性、变化的被控对象和干扰信号,及时地测得它们的信息,并根据此信息按一定的设计方法,自动地做出控制决策、修改控制器结构和参数,使其控制信号能够适应对象和扰动的动态变化,在某种意义上达到控制效果最优或次优。 1.1 自适应控制介绍 目前自适应控制的种类很多,从总体上可以分为三大类:自校正控制、模型参考自适应控制和其他类型的自适应控制。 自校正控制的主要问题是用递推辨识算法辨识系统参数,根据系统运行指标来确定调节器或控制器的参数。其原理简单、容易实现,现已广泛地用在参数变化、有迟滞和时变过程特性,以及具有随机扰动的复杂系统。自校正控制系统的一般结构图如图1所示。自校正控制适用于离散随机控制系统。 图1 自校正控制结构图
模型参考自适应控制,利用可调系统的各种信息,度量或测出各种性能指标,把模型参考自适应控制与参考模型期望的性能指标相比较;用性能指标偏差通过非线性反馈的自适应机构产生自适应律来调节可调系统,以抵消可调系统因“不确定性”所造成的性能指标的偏差,最后达到使被控的可调系统获得较好的性能指标的目的。模型参考自适应控制可以处理缓慢变化的不确定性对象的控制问题。由于模型参考自适应控制可以不必经过系统辨识而度量性能指标,因而有可能获得快速跟踪控制。模型参考自适应控制结构框图如图2所示,模型参考自适应控制一般用于确定性连续控制系统。 图2 模型参考自适应框图 其他形式的自适应控制系统是指除前面所描述的自校正控制系统和模型参考控制系统以外基于先进理论的自适应控制系统及多变量过程自适应控制系统、非线性自适应控制系统和权系数自适应控制系统等。 1.2 自适应控制应用及其优缺点 控制器参数的调整最早出现于1940年,直到20世纪50年代末,由于飞机控制器的需要,麻省理工学院首先提出了飞机自动驾驶仪的模型参考自适应控制方案。1960年至1970年间,伴随着控制理论的发展,自适应控制设计有了有效的基础,进入20世纪80年代后,随着数字机性能价格比的迅速改善和微机应用技术的不断提高,至此自适应控制得到了充分的应用。如今自适应控制得到进一步发展,其不仅在工业领域取得了较大的成功,而且在社会、经济和医学等非工业领域也进行了有益的探索。自适应控制的应用主要有以下几个方面:工业过程控制,智能化高精密机电或电液系统控制,电力系统的控制,航天航空、航海和无人驾驶,柔性结构与振动和噪声的控制,生物工程及武器系统。 同一般的反馈控制相比,自适应控制具有如下优点: (1)一般反馈控制主要适用于事先确知的对象或确定性对象。自适应控制可应用先前无法确知的对象和时变对象。 (2)一般反馈控制具有抗干扰能力,能够消除状态扰动引起的系统误差。自适应控制因为有辨识对象和在线修改参数的能力,因而不仅能够消除状态扰动引起的系统误差,还能消除系统结构扰动引起的系统误差。
交通流预测模型综述 摘要: 随着社会的发展,交通事故、交通堵塞、环境污染和能源消耗等问题日趋严重。为了缓解交通压力,交通专家也提出了各种不同的方法。在交通网络越来越复杂的今天,交通流预测在智能交通系统中是个热门的研究领域,因为正确的交通流预测,可以进行实时交通信号控制,交通分配、路径诱导、自动导航,事故检测等。本文从交通流短期预测模型出发,分析常见预测模型的优缺点,得出综合模型进行预测将是交通流预测领域的发展趋势。 关键字:交通流预测,智能交通系统,综合模型 Traffic flow predictive models review Abstract: With the development of society, traffic accidents, traffic jams, environmental pollution and energy consumption problems become more and more serious. In order to alleviate traffic pressure, traffic experts also puts forward all kinds of different methods. In the traffic network is more and more complex today, traffic flow predictive in intelligent transportation system is a hot research fields, because the correct traffic flow predictive, can real-time traffic signal control, traffic distribution, route guidance, automatic navigation, accident detection, etc. This article from short-term prediction model of traffic flow, analyzes the advantages and disadvantages of common prediction model, it is concluded that predict comprehensive model will be traffic flow predictive areas of development trend. Keywords:Traffic flow predictive, Intelligent transportation system, integrated model 引言 目前,有关交通流预测方面的研究已取得大量的成果,建立了多种实时交通量预测的方法,其预测精度也达到了较高水平。本文先是通过研究分析不同交通流短期预测模型的优缺点,然后对具有优势的基于神经网络的综合模型进行模型的构建。 一、交通流预测概述 (一)交通流预测的必要性 随着人们生活水平的提高,私家车的数量、人们出行的次数等越来越多,使得交通事故、交通堵塞、环境污染和能源消耗等问题日趋严重。很多城市也陷入了“拥有最宽阔的马路,也拥有最宽阔的…停车场?”的困境,严重影响了城市的运转效率,客观上阻碍了社会、经济的快速发展。多年来,世界各国的城市交通专家提出各种不同的方法,试图通过先进的智能交通手段来缓解交通拥堵问题。而实现这些系统或方法的关键,不仅要有实时的道路检测数据,更重要的是,要获得实时、可靠、准确的预测信息。再利用动态路径诱导和交通信息系统为出行者提供实时有效的道路信息,实现动态路径诱导,达到节约出行者旅行时间,缓解道路拥堵,减少污染、节省能源等的目的。因此,准确、可靠的交通预测信息是动态路径诱导系统的基础和关键。