负载敏感
一、负载敏感和压力补偿概念
(一)负载敏感(Load Sensing)和压力补偿(Pressure Compensation)是60年代提出的液压传动和控制的新概念。
以往液压系统在使用操纵过程中,存在着以下需解决的问题:
1. 节能要求,适应负载变化提供负载所需要的液压功率(流量和压力),尽量减少流量和压力损失,将节流调速改变为以容积调速为主,特别按负载需要提供负载所需的流量。
2. 操纵阀调速控制时,调速受负载压力变化和油泵流量变化的影响,难以操纵控制。
3. 单泵供多执行器:当多执行器同时动作时,要求相互不干涉,能够操纵各执行器按所需流量供油。合理地分配流量,实现理想复合动作。
4. 液压泵和原动机的匹配问题,能充分利用原动机的功率,保持在发动机最大功率点工作,同时能防止发动机熄火,为了减少能耗节能,要求液压泵和发动机在联合工作最经济点上工作。
为了解决以上问题,60年代提出液压传动控制新概念—负载敏感和压力补偿。
目前液压传动仍存在问题有待解决。例如液压传动遵循帕斯卡原理,一个泵供多个执行器时,系统压力由克服各负载中所需最大压力来确定,因此供给负载较低的执行器时必然存在压力损失。目前人们正在研究采用电路中变压器这类东西,来解决这个问题。
(二)负载敏感和压力补偿的定义:负载敏感是一个系统概念,因此应称为负载敏感系统,可把它看作是一个意义广泛的名词。(即广义的负载敏感和压力补偿)。
负载敏感通过感应检测出负载压力,流量和功率变化信号,向液压系统进行回馈,实现节能控制、流量和调速控制、恒力矩控制、力矩限制、恒功率控制、功率限制、转速限制、同时动作和与原动机动力匹配等控制的总称。负载敏感系统所采用的控制方式包括液压控制和电子控制。
从负载敏感系统的液压组件来看可分:
负载敏感阀:将压力、流量和功率变化信号,向阀进行回馈,实现控制功能的阀。
负载敏感泵:将压力、流量和功率变化信号,向泵进行回馈,实现控制功能的泵和马达。负载敏感系统可降低液压系统能耗,提高机械生产率,改善系统可控性,降低系统油温,延长液压系统寿命。
压力补偿:
将压差设定为规定值进行的自动控制都叫压力补偿。
压力补偿流量控制:不受负荷压力变化和液压泵流量变化的影响,由设定节流压差值
对流量进行自动控制,称为压力补偿流量控制。
在节流调速中,根据流量基本计算式,,压差保持不变(常数),只要调节阀口面积(反映在k上)就能控制通过阀的流量,通过改变阀的开度,不受负载和液压泵流量影响,改变和控制流量,利用流量控制阀的原理来进行调速,提出了压力补偿概念。在节流口上,并联或串联一个压力补偿器。
(三)开中心直通型油路系统存在的问题。
前面已经谈到挖掘机开心式油路都采用六通多路阀,有二条供油路,直通供油路可组成优先油路,中位时直通回油箱进行卸载。并联供油路,组成并联油路,把二种油路采用各种方式组成起来,就构成了复杂多变的挖掘机油路。
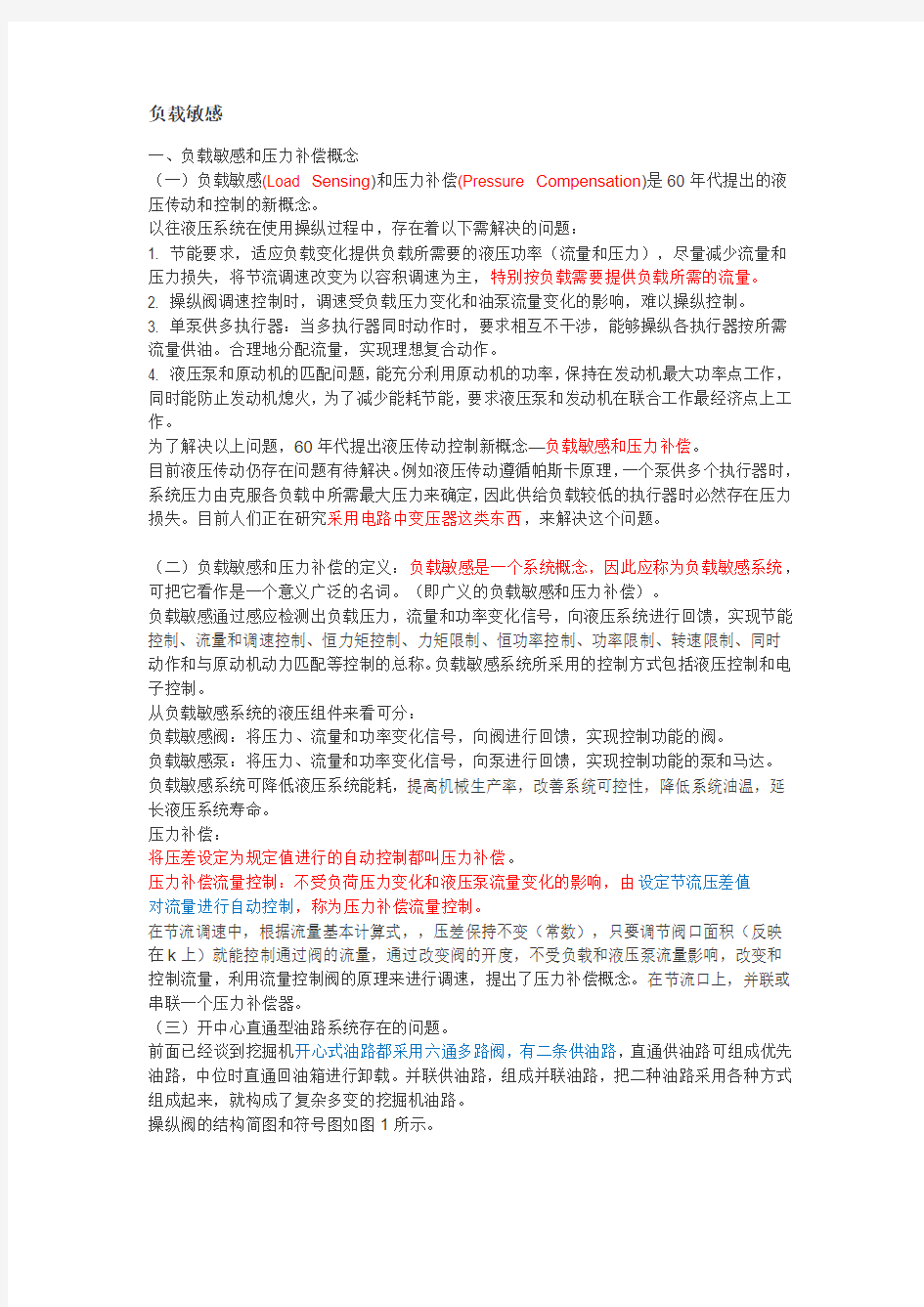
操纵阀的结构简图和符号图如图1所示。
图1 操纵阀结构简图和符号图
操纵阀在中位时泵压力油P通过直通油道,通过各阀,最后回油箱T,执行器动作时P→D 的阀口逐渐关小,P→A和B→T的阀口逐渐开大,其开口面积变化(方向阀的开口特性)
如图2所示。
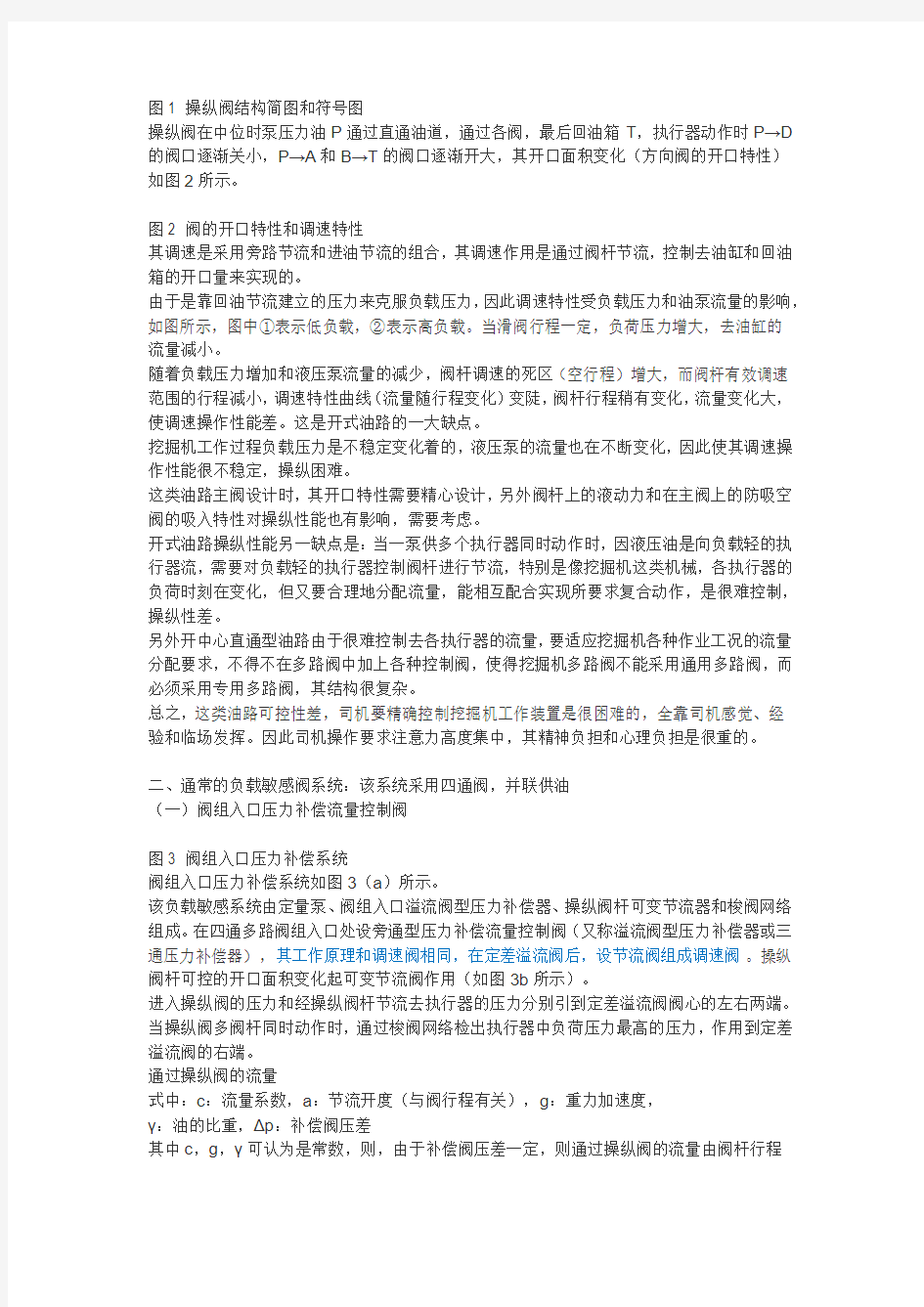
图2 阀的开口特性和调速特性
其调速是采用旁路节流和进油节流的组合,其调速作用是通过阀杆节流,控制去油缸和回油箱的开口量来实现的。
由于是靠回油节流建立的压力来克服负载压力,因此调速特性受负载压力和油泵流量的影响,如图所示,图中①表示低负载,②表示高负载。当滑阀行程一定,负荷压力增大,去油缸的流量减小。
随着负载压力增加和液压泵流量的减少,阀杆调速的死区(空行程)增大,而阀杆有效调速范围的行程减小,调速特性曲线(流量随行程变化)变陡,阀杆行程稍有变化,流量变化大,使调速操作性能差。这是开式油路的一大缺点。
挖掘机工作过程负载压力是不稳定变化着的,液压泵的流量也在不断变化,因此使其调速操作性能很不稳定,操纵困难。
这类油路主阀设计时,其开口特性需要精心设计,另外阀杆上的液动力和在主阀上的防吸空阀的吸入特性对操纵性能也有影响,需要考虑。
开式油路操纵性能另一缺点是:当一泵供多个执行器同时动作时,因液压油是向负载轻的执行器流,需要对负载轻的执行器控制阀杆进行节流,特别是像挖掘机这类机械,各执行器的负荷时刻在变化,但又要合理地分配流量,能相互配合实现所要求复合动作,是很难控制,操纵性差。
另外开中心直通型油路由于很难控制去各执行器的流量,要适应挖掘机各种作业工况的流量分配要求,不得不在多路阀中加上各种控制阀,使得挖掘机多路阀不能采用通用多路阀,而必须采用专用多路阀,其结构很复杂。
总之,这类油路可控性差,司机要精确控制挖掘机工作装置是很困难的,全靠司机感觉、经验和临场发挥。因此司机操作要求注意力高度集中,其精神负担和心理负担是很重的。
二、通常的负载敏感阀系统:该系统采用四通阀,并联供油
(一)阀组入口压力补偿流量控制阀
图3 阀组入口压力补偿系统
阀组入口压力补偿系统如图3(a)所示。
该负载敏感系统由定量泵、阀组入口溢流阀型压力补偿器、操纵阀杆可变节流器和梭阀网络组成。在四通多路阀组入口处设旁通型压力补偿流量控制阀(又称溢流阀型压力补偿器或三通压力补偿器),其工作原理和调速阀相同,在定差溢流阀后,设节流阀组成调速阀。操纵阀杆可控的开口面积变化起可变节流阀作用(如图3b所示)。
进入操纵阀的压力和经操纵阀杆节流去执行器的压力分别引到定差溢流阀阀心的左右两端。当操纵阀多阀杆同时动作时,通过梭阀网络检出执行器中负荷压力最高的压力,作用到定差溢流阀的右端。
通过操纵阀的流量
式中:c:流量系数,a:节流开度(与阀行程有关),g:重力加速度,
γ:油的比重,Δp:补偿阀压差
其中c,g,γ可认为是常数,则,由于补偿阀压差一定,则通过操纵阀的流量由阀杆行程
所决定,与负荷无关(见图3c和d)。
该系统的特点是:
1. 在操纵阀杆都处于中位时,溢流阀背面油压回油箱,起卸载阀作用,中位卸载压力为3. 5bar左右。由于中位通过卸载阀卸油,操纵阀杆是封闭的,油液不通过阀杆,因此俗称闭式(闭中心)油路。
2. 有一个操纵阀杆动作时,油泵通过该阀组的流量,由该阀杆的行程所确定,和其负载和油泵流量无关,如图3(c)和(d)所示。泵的出口压力比负载压力约高10bar左右,(用于克服补偿器液阻和操纵阀液阻)。
3. 多个操纵阀杆同时动作时,只是负载压力最高的得到补偿,该执行器流量由此阀杆行程确定。而其它阀杆操纵时的流量分配是不确定的。
4. 溢流旁通型压力补偿阀可作为优先供油阀,即将旁通回油箱改为旁通供给下游阀。该阀首先保证它控制的阀的供油需要,剩下的才供给其下游阀。
(二)各阀杆单独压力补偿流量控制阀
图4 各阀杆压力补偿系统
仅在阀组入口设旁通型压力补偿流量控制阀,在多阀杆同时动作时,只是负荷压力最高的得到补偿,而其它阀杆流量是不确定的,为了解决此问题,在操纵阀各阀杆前增设减压阀型压力补偿流量控制阀(或称直通型或二通型压力补偿器),如图4(a)所示,减压阀型压力补偿流量控制阀如图4(b)所示。
该阀与调速阀工作原理相同,它是在定差减压阀后设节流阀组成调速阀,操纵阀杆可控开口面积变化起可变节流阀的作用。操纵阀阀杆入口压力和操纵阀杆节流控制去执行器的压力分别引到定差减压阀阀芯的左右两端。
其通过流量,当减压阀弹簧力设定后,Δp可认为不变,因此通过阀杆的流量只和k(阀杆行程)有关,基本不受负载压力变化的影响,多阀杆同时动作时彼此没有影响,提高了各阀杆的调速控制性能。减压阀型压力补偿流量控制阀设计压降一般为7bar左右,但是这种负载敏感系统存在一个缺点,当液压泵流量足够时,通过操纵阀阀口的压差都能达到补偿压力,这时各阀入口压力补偿阀都能起调节作用。当多个执行器同时动作时,其操纵阀都在大开度下工作。各执行器总流量需求往往会超过泵的供油流量,即所谓的流量出现饱和时。
这时由于并联供油,油首先供给低压执行器,满足低压执行器的需要,流经低压操纵阀的压力降能达到补偿压力,其压力补偿阀能起控制流量作用。即泵流量不足时首先保证供给低压执行器,多余下来的油才供给高压执行器,此时流向高压执行器操纵阀的流量不足,达不到压力补偿阀起作用的压力。高压执行器动作速度降低,甚至不动,见图5(由于泵的油都供给负荷低的执行器,其输出压力可能低于最高负荷压力)。
此时进入达到补偿压差的低压执行器,可由其操纵阀行程来控制其速度,达不到补偿压差的高压执行器,不能用操纵阀来控制其运动。
低压执行器和高压执行器的操纵阀杆行程和其速度关系如图5所示。
图5
此现象在挖掘机上很严重,首先挖掘机要求高生产率和高速传动,要求能向一个执行组件供给泵的全部流量,其次挖掘机经常需要几个执行器同时动作,而且挖掘机负荷大,其压力感应恒功率控制和发动机转速下降等因素,都使泵输出流量降低,因此经常出现泵流量饱和现象,必须解决此问题。
(三)变量泵负载敏感压力补偿系统
以上所述的是定量泵负载敏感压力补偿系统,执行组件调速采用节流调速,能量损失大,为
了减少能量损失,应把节流调速改为容积调速,为此采用变量泵负载敏感压力补偿系统,如图6所示。
该系统采用了负载敏感泵,其变量机构由伺服油缸和油泵调节阀(负载敏感)组成。
油泵调节阀左端受油泵压力作用,右端受最大负载压力和弹簧力作用。
当左端油泵压力作用力小于右端最大负载压力和弹簧力作用时,阀在右位,伺服缸回油,在其弹簧力作用下,油泵处于最大排量位置。当左端油泵压力作用力大于右端最大负载压力和弹簧力作用时,阀在左位,油泵压力油进入伺服缸,压缩弹簧使油泵的流量减少。
图6 阀前压力补偿分流比负载敏感系统
该系统当操纵阀都在中位时,所有负载压力线都回油,油泵压力只需克服油泵调节阀弹簧力,就能使油泵调节阀处于左位,油泵油进入伺服缸,由于操纵阀中位封闭,油泵通向伺服缸作用油压达到足够高,使油泵排量变得最小,实现中位卸载。
当油泵压力作用力大于最大负载压力作用力和卸载阀弹簧力时,卸载阀打开,油泵回油,由于卸载阀弹簧作用力设计成大于油泵调节阀弹簧作用力,因此油泵调节阀处于左位,油泵压力油进入伺服缸,使油泵排量变得很小,实现高压卸载。
当操纵某一操纵阀阀杆时,由于操纵阀杆节流,压力补偿阀节流和沿途阻力损失,使油泵压力P大于负载压力PL。当P作用力大于PL作用力加弹簧力时,使阀处于右位,压力油进入伺服缸,克服弹簧力,使油泵排量减小。由于油泵排量减小,使得操纵阀和压力补偿阀的节流压降和沿途压降都减小,则压差P-PL减小,使油泵调节阀向右移动,取得新的平衡,即操纵阀开度减小时,油泵排量也随之减少,实现容积调速,按需供油。
当多阀杆同时动作时,油泵响应最大负载操纵阀进行变量供油。
三、分流比(抗流量饱和)负载敏感阀系统
当多个执行器同时动作,其流量需要超过泵的供油流量时,会出现负荷较大的执行组件速度变慢,甚至停止。使得几个机构不能同时动作,影响挖掘机正常工作。
当出现流量饱和时,不能满足各执行组件流量的需要,较合理的方法是各执行组件都相应地减少供油量,对应各阀杆操纵行程,按比例分配流量。我们称这种系统为分流比负荷敏感阀系统。
通常的负荷敏感阀系统的特点是各操纵阀由独立的压力补偿器来设定阀杆的进口压力和出口压力之差是一定的。各阀杆的补偿压力可以设定为不相同,阀杆进出口压差是由弹簧力所决定。其主要问题是要起补偿作用必须油流经操纵阀产生的压降达到补偿压力。在并联油路中油优先流向低负荷执行器,在流量不足时,高负荷执行器得不到足够流量,不起补偿作用。为了解决此问题,将压力补偿器进行改进,让它起负荷均衡器作用,低负荷的执行器通过压力补偿器的节流,使它与高负荷执行器的负荷压力相同,这样各路负荷相等,就避免了油优先流向低负荷执行器问题。
分流比负荷敏感阀系统的特点是设计使得所有阀杆进出口的压差都是相等的,与各执行器的负荷状况无关。因为所有阀杆的进出口压差相等,所以各执行器同时动作时,通过各阀杆的流量只和该阀杆的行程(节流程度)有关。当流量饱和时,按各阀的行程等比例地减少去各路的流量。如图7所示。
图7 抗饱和功能
分流比负载敏感系统有以下三种形式:
(一)阀前压力补偿分流比负荷敏感系统
图6所示为林德公司分流比负载敏感系统,其特点是:
在每个操纵阀前设置压力补偿阀,此压力补偿阀阀心左端受油泵压力PP和其负载压力PL
作用,右端受操纵阀前压力Pm和由梭形阀引入的最高负载压力PL1(设PL1>PL2,PL1=PLmax)作用,对压力补偿阀1取力平衡得:(设阀芯左右面积相等)
得
油流通过压力补偿阀无压差。
操纵阀1 进出口的压差
对压力补偿阀2 取力平衡得
油流通过压力补偿阀2的压差为
,正好补偿了两执行器压力负荷的差值。
操纵阀2 进出口的压差
即所有阀杆的进出口压差相等,为油泵口压力和最高负载压力之差。
通过两操纵杆的流量分别为
各阀相同,去各执行组件的流量仅取决于各阀杆的行程(,)
当多执行器同时动作时,按各阀杆行程成比例地分配去各路的油量。
(二)阀后压力补偿分流量比负载敏感系统
在每个操纵阀后设压力补偿阀,如图8所示。
压力补偿阀阀心一端受操纵阀进出口压力作用,其另一端受弹簧力和通过梭阀引入最高负载压力(设PL1>PL2)作用,
对压力补偿阀1取力平衡
对压力补偿阀2取力平衡
图8 阀后压力补偿分流比
负载敏感系统
如设计中,取两压力补偿阀相等,则
式中:
、-—分别为操纵阀1和2的出口油压
—最高负载压力
—弹簧力
—压力补偿阀阀心压力作用面积
各操纵阀的入口为泵的压力,出口压力分别为和,两者相等,因此各操纵阀的进出口的压差都相等。
若各执行组件负载压力不等,而泵的供油压力是一定的,操纵阀的进出口压差也是相等的,显然各压力补偿阀起了补偿作用,其节流程度不同,产生不同的压差,达到均衡负荷的目的。
1. Husco阀后补偿分流比负载敏感阀
该阀用于小挖掘机上,阀的具体结构如图9所示。其符号原理图如图10(a)所示。
①泵进油口②压力补偿阀③可变节流孔④进油腔⑤压力补偿阀进油口⑥回油口
图9 HUSCO负荷敏感多路阀结构
由于操纵阀起方向阀作用,通向执行器来去有两条油路,如压力补偿阀设在方向阀后就需两个,这样将使该阀的结构复杂化。为了解决此问题,Husco操纵阀增加了一条可变节流进
油道,该油道两个方向都起作用,在其后设压力补偿阀,组成了分流比负载敏感系统。通过压力补偿阀之后,再经方向阀去执行器。其实际工作原理如图10(b)所示。该操纵阀实现了两个功能,可变节流功能和方向阀功能(设计成无节流)。
图10 阀后补偿负载敏感阀符号和原理图
2. 力士乐LUDV阀后补偿分流比负载敏感阀
该阀用于力士乐挖掘机液压系统上,阀的具体结构如图11所示,其原理符号如图12所示。
1.阀体
2.主阀
3.单向阀
4.压力补偿阀
5.带单向阀的限压阀
6.螺堵塞
图11 力士乐LUDV多路阀具体结构图
该阀与Husco阀有相同之处,也是操纵阀可变节流油道后设压力补偿阀,然后通过方向阀
去执行器。
所不同的是其压力补偿阀与Husco压力补偿阀不同,它除了起压力补偿作用外,还起梭阀
网络作用,检出执行器中最高负荷压力作用在各压力补偿阀的左端。
该压力补偿阀是三位三通阀。三条通路:经操纵阀节流操纵后油道O,去方向阀油道D,和负载敏感油道LS。压力补偿阀右端受各阀油道O的压力作用,左端受LS压力和弹簧作用。负荷压力最大的那个压力补偿阀要求开度最大,该阀处于右位,O不经节流直通D,同时通过节流孔与LS相通,负荷压力较低的压力补偿阀只能处于开度较小的中位,O与LS不通,O经节流通向D,起均衡负载作用。因此LS检出的是最高负荷压力。
图12 LUDV多路阀单片阀原理符号图
LUDV多路阀液压系统图如图13所示。
图13 LUDV多路阀液压系统图
(三)(东芝IB系列)回油路压力补偿分流比负载敏感系统。
其符号原理如图14所示,该系统阀用于东芝挖掘机的液压系统上。
1. 工作原理和特点
其主要特点是压力补偿阀布置在操纵阀回油路上。
从压力补偿阀平衡可得:
式中:各阀负载压力
则得::最大负载压力
:弹簧力,采用弱弹簧,可忽略弹簧力
即各执行器负载压力相等,都为(由于回路上压力补偿阀的节流补偿作用,使各阀的负载均衡)。
各操纵阀阀杆进出口压差都相等为式中:为各阀的进口压力
由于各阀相等,因此通过各阀杆的流量只与阀杆行程有关,具有抗饱和的功能。
把压力补偿阀放在回油路上的优点是可以利用压力补偿阀的节流补偿作用,防止因重力作用,
过快下降或产生真空,容易利用重力组成再生回路。图14 IB负载敏感阀原理图
DIY 电子负载系统 设计思想:1、想了解手中各种电源、电池特性,电子负载必不可少 2、设计制作不同类型电子负载,享受体验各自特性,所以做了两个:无源型与有源型 3、花钱要尽可能少,最大程度利用手中现有设备完成数据采集自动化 4、外观设计尽可能具有自己的个性风格
一、无源电子负载 二、 简介:1、电路尽可能简单、花钱要尽可能少 2、避开每次使用都用万用表监视调整负载电流 3、使热量尽可能均匀分布在一块电路板上,免去外加散热器 4、手中各种锂电比较多,打算专门为锂电服务 5、基于以上几点反复思考决定使用六片AMS1117-1.2(0.2元/片)完成恒流每路一片AMS1117-1.2,恒流100mA,六路最大负载电流总和为600mA 六片AMS1117-1.2均匀分布在一块电路板上,刻电路板时尽量保存覆铜加强散热 6、用5个拨号开关设定电流 5个拨号开关全部关断时,负载电流为100mA,每接通一个开关,增加100mA 7、用较厚的不锈钢带将电路板链接在底座上 8、适应电压范围:最小电压为2.7V,最高适应电压由AMS1117-1.2决定 9、用手中VC86D(带USB电脑接口)万用表完成数据采集自动化
二、有源电子负载 简介:1、电路尽可能简单、花钱要尽可能少,服务于各种电源、电池 2、核心元器件为:IRF520(1.9元/个)、LM358P(0.2元/片)、TL431(0.1元/个)3、在铝合金门窗加工点寻找一块料头做散热器,整体设计围绕这块铝合金料头 4、铝合金料头是块方管,为了解决散热通风,在下面开个长方形口 使得散热对流获得改善,同时还可以用小风扇从下面往上吹进行强制散热5、LM358P内部两个运算放大器,实际用一个就可以,避免浪费,两个运算放大器全部使用 其中一个做采样放大,将电流采样信号最大值放大到2.5V,与TL431基准电压相同 另一个接IRF520,去调整稳定负载电流 6、电流取样电阻为0.068Ω无感陶瓷电阻(过两天到货,暂时用0.22Ω普通电阻,电流只能达到1A) 7、用较厚较宽的不锈钢带将电路板链接在底座上 8、电流可调范围在0~3A之间,1A时最低适应电压可达0.5V以下,最高适应电压由IRF520决定 功耗8W以内不需要扇强制散热,加风扇强制散热功率至少提高一倍9、同样用手中VC86D(带USB电脑接口)万用表完成数据采集自动化
液压系统基础知识大全 液压系统的组成及其作用 一个完整的液压系统由五个部分组成,即动力元件、执行元件、控制元件、辅助元件(附件)和液压油。 动力元件的作用是将原动机的机械能转换成液体的压力能,指液压系统中的油泵,它 向整个液压系统提供动力。液压泵的结构形式一般有齿轮泵、叶片泵和柱塞泵。执 行元件(如液压缸和液压马达)的作用是将液体的压力能转换为机械能,驱动负载作直线 往复运动或回转运动。 控制元件(即各种液压阀)在液压系统中控制和调节液体的压力、流量和方向。根据控制功能的不同,液压阀可分为村力控制阀、流量控制阀和方向控制阀。压力控制阀又分为益流阀(安全阀)、减压阀、顺序阀、压力继电器等;流量控制阀包括节流阀、调整阀、分流集流阀等;方向控制阀包括单向阀、液控单向阀、梭阀、换向阀等。根据控制方式不同,液压阀可分为开关式控制阀、定值控制阀和比例控制阀。 辅助元件包括油箱、滤油器、油管及管接头、密封圈、快换接头、高压球阀、胶管总成、测压接头、压力表、油位油温计等。 液压油是液压系统中传递能量的工作介质,有各种矿物油、乳化液和合成型液压油等 几大类。 液压系统结构
液压系统由信号控制和液压动力两部分组成,信号控制部分用于驱动液压动力部分中 的控制阀动作。 液压动力部分采用回路图方式表示,以表明不同功能元件之间的相互关系。液压源含有液压泵、电动机和液压辅助元件;液压控制部分含有各种控制阀,其用于控制工作油液的流量、压力和方向;执行部分含有液压缸或液压马达,其可按实际要求来选择。 在分析和设计实际任务时,一般采用方框图显示设备中实际运行状况。空心箭 头表示信号流,而实心箭头则表示能量流。 基本液压回路中的动作顺序—控制元件(二位四通换向阀)的换向和弹簧复位、 执行元件(双作用液压缸)的伸出和回缩以及溢流阀的开启和关闭。对于执行元件 和控制元件,演示文稿都是基于相应回路图符号,这也为介绍回路图符号作了准备。 根据系统工作原理,您可对所有回路依次进行编号。如果第一个执行元件编号为,则与 0其相关的控制元件标识符则为1。如果与执行元件伸出相对应的元件标识符为 偶数,则与执行元件回缩相对应的元件标识符则为奇数。不仅应对液压回路进行编 号,也应对实际设备进行编号,以便发现系统故障。 DIN ISO1219-2 标准定义了元件的编号组成,其包括下面四个部分:设备编号、回路编号、元件标识符和元件编号。如果整个系统仅有一种设备,则可省略设备编号。实际中,另一种编号方式就是对液压系统中所有元件进行连续编号,此时,元件编 号应该与元件列表中编号相一致。这种方法特别适用于复杂液压控制系统,每个控 制回路都与其系统编号相对应 国产液压系统的发展 目前我国液压技术缺少技术交流,液压产品大部分都是用国外的液压技术加工回来的,液压英才网提醒大家发展国产液压技术振兴国产液压系统技术。 其实不然,近几年国内液压技术有很大的提高,如派瑞克等公司都有很强的实力。 液压附件: 目前在世界上,做附件较好的有: 派克(美国)、伊顿(美国)颇尔(美国) 西德福(德国)、贺德克(德国)、EMB(德国)等 国内较好的有: 旭展液压、欧际、意图奇、恒通液压、依格等 液压传动和气压传动称为流体传动,是根据17世纪帕斯卡提出的液体静压力传动原理而 发展起来的一门新兴技术,是工农业生产中广为应用的一门技术。如今,流体传动技术水 平的高低已成为一个国家工业发展水平的重要标志。 1795年英国约瑟夫·布拉曼(Joseph Braman,1749-1814),在伦敦用水作为工作介质,以水 压机的形式将其应用于工业上,诞生了世界上第一台水压机。1905年将工作介质水改为油, 又进一步得到改善。 第一次世界大战(1914-1918)后液压传动广泛应用,特别是1920年以后,发展更为迅速。液
负载敏感多路阀原理 负载敏感多路阀在拖拉机化肥撒布系统的应用 采用CP2定差减压阀和CP3定差溢流阀实现多路阀多支路同时动作, 可以改善液压系统调速性能,提高效率,减少发热,减少能量消耗。通常是在多路阀中用2通定差减压阀CP2与流量阀(工作阀片)串联组合成调速阀,在多路阀的进口阀片用3通式旁通式定差溢流阀CP3通过CH 梭阀网络回路与工作阀片并联组合成旁通式溢流调速阀。 以下图为例,该阀的进口阀块内置CP3三通定差旁通溢流阀(逻辑元件),每个比例流量阀进口前置CP2二通压力补偿定差减压阀,CH负载感应梭阀。各阀功能如下: ?CP3三通旁通定差溢流阀:当多路阀停止操作,且各阀均在中位时,CP3则以补偿弹簧压力(10-13公斤)旁通泵供油流量。当某一比例流量阀(工作阀片)工作时,CP3旁通溢流阀在该执行元件负载压力作用下减少阀口开度,减少旁通流量,根据负载压力提供所需的流量,此时供油压力随负载压力变化,效率高,发热量小。 ?CH负载感应梭阀(工作阀片):CH负载感应梭阀将各工作阀片中的最高负载压力传至进口阀块的CP3弹簧侧。 ?CP2二通定差减压阀:当一个或多个比例流量阀同时工作时,负载压力传至CP2阀的弹簧侧。此时,通过阀心的负反馈作用,来自动调节流量阀(工作阀片)阀口两端的压力差, 使其基本保持不变。在CP2的压力补偿作用下各阀的流量均保持恒定,使各流量阀的流量与其输入信号成比例,流量大小与阀的开度成正比,独立控制且不受其它负载变化的干扰,从而保证多机构同步动作。 定量泵接入进口阀块P口,油泵压力经P1口作用于压力补偿旁通阀的底部,CP3的弹簧腔与工作片阀的LS负载反馈系统的梭阀连通。
一、负载敏感和压力补偿概念 (一)负载敏感(Load Sensing)和压力补偿(Pressure Compensation)是60年代提出的液压传动和控制的新概念。 以往液压系统在使用操纵过程中,存在着以下需解决的问题: 1. 节能要求,适应负载变化提供负载所需要的液压功率(流量和压力),尽量减少流量和压力损失,将节流调速改变为以容积调速为主,特别按负载需要提供负载所需的流量。 2. 操纵阀调速控制时,调速受负载压力变化和油泵流量变化的影响,难以操纵控制。 3. 单泵供多执行器:当多执行器同时动作时,要求相互不干涉,能够操纵各执行器按所需流量供油。合理地分配流量,实现理想复合动作。 4. 液压泵和原动机的匹配问题,能充分利用原动机的功率,保持在发动机最大功率点工作,同时能防止发动机熄火,为了减少能耗节能,要求液压泵和发动机在联合工作最经济点上工作。 为了解决以上问题,60年代提出液压传动控制新概念—负载敏感和压力补偿。 目前液压传动仍存在问题有待解决。例如液压传动遵循帕斯卡原理,一个泵供多个执行器时,系统压力由克服各负载中所需最大压力来确定,因此供给负载较低的执行器时必然存在压力损失。目前人们正在研究采用电路中变压器这类东西,来解决这个问题。 (二)负载敏感和压力补偿的定义:负载敏感是一个系统概念,因此应称为负载敏感系统,可把它看作是一个意义广泛的名词。(即广义的负载敏感和压力补偿)。 负载敏感通过感应检测出负载压力,流量和功率变化信号,向液压系统进行反馈,实现节能控制、流量和调速控制、恒力矩控制、力矩限制、恒功率控制、功率限制、转速限制、同时动作和与原动机动力匹配等控制的总称。负载敏感系统所采用的控制方式包括液压控制和电子控制。 从负载敏感系统的液压元件来看可分: 负载敏感阀:将压力、流量和功率变化信号,向阀进行反馈,实现控制功能的阀。 负载敏感泵:将压力、流量和功率变化信号,向泵进行反馈,实现控制功能的泵和马达。 负载敏感系统可降低液压系统能耗,提高机械生产率,改善系统可控性,降低系统油温,延长液压系统寿命。 压力补偿: 将压差设定为规定值进行的自动控制都叫压力补偿。 压力补偿流量控制:不受负荷压力变化和液压泵流量变化的影响,由设定节流压差值 对流量进行自动控制,称为压力补偿流量控制。 在节流调速中,根据流量基本计算式,p k Q ?=,压差保持不变(=?p 常数) ,只要调节阀口面积(反映在k 上)就能控制通过阀的流量,通过改变阀的开度,不受负载和液压泵流量影响,改变和控制流量,利用流量控制阀的原理来进行调速,提出了压力补偿概念。在节流口上,并联或串联一个压力补偿器。 (三)开中心直通型油路系统存在的问题。 前面已经谈到挖掘机开心式油路都采用六通多路阀,有二条供油路,直通供油路可组成优先油路,中位时直通回油箱进行卸载。并联供油路,组成并联油路,把二种油路采用各种方式组成起来,就构成了复杂多变的挖掘机油路。 操纵阀的结构简图和符号图如图1所示。
液压控制技术 在液压控制技术起初,加工机械厂的加工运动的速度取决于控制阀的横截面及液压流体的粘度。 三位六通换向控制阀块 (open center) 对于速度的灵敏控制只能通过严格操纵才能实现。 接着,根据3位6通换向阀的原理对第一个控制阀块做一个重大改进,就使得一个机床工人同时相应地控制几个加工运动成为可能。
下面用M1控制阀块的例子来图解这个工作原理 在阀杆中位,油液通过铸造的通道无压的从P口流到T口(中位循环),泵和执行机构工作油路的接口A和B连接切断。可利用机械式的手柄或依靠液压方式在a1或b1口引入先导压力,使阀杆离开中位而移动。 依靠阀杆的换向和对阀杆的控制,减少P口到T口连接的通道,随着其进一步位移,进一步减少流通面积,使流阻增大(流通面积的缩减导致流阻的增加),以至于压力因此增加。随着从P口到T口的流通面积减少,P口到A口或P口到B口的连接通道将打开,液体将流到执行器接口。当由于压力和液压缸面积产生的力超过作用在液压缸上的负载外力时,油缸开始移动。P→A(或P→B)的流通面积直接决定了流量,从而也决定了液压缸或液压马达的速度。安全阀限制系统最高压力,活塞上单向阀能防止阀杆在中位时油缸下降。 以上所述的工作原理同样适用于几个阀杆,根据液压泵提供有效流量,所 M1单阀块截面图
有操作能从停止到最大速度相应并行地受到控制。 三位六通换向阀的控制原理,也称作“节流控制”,它在元件布置方面是简单的,操作可靠,经济划算,系统可使用定量或变量泵。缺点是节流调速时,有部分多余的压力油直接回油箱,造成功率损失。 而且,其控制特点是与压力相关的,在并联油路几个执行机构同时动作时,可能彼此互相影响。 这就是开发与负载压力无关的负载传感系统的决定性原因。 负载传感系统 同样就负载传感系统而言,执行机构的速度是由控制块内主阀芯的位置决定的。打开的通量截面较大也就意味着速度较高。最基本的差异是用负载传感,流量是可控的。 泵只需要提供当前所需的流量,其功能是通过把从液压控制系统的压力反馈到泵上来实现的。 该泵设计成控制器在系统内能以恒定的标准值来保持一定的压力差,以输 Steue
负载敏感 一、负载敏感和压力补偿概念 (一)负载敏感(Load Sensing)和压力补偿(Pressure Compensation)是60年代提出的液压传动和控制的新概念。 以往液压系统在使用操纵过程中,存在着以下需解决的问题: 1. 节能要求,适应负载变化提供负载所需要的液压功率(流量和压力),尽量减少流量和压力损失,将节流调速改变为以容积调速为主,特别按负载需要提供负载所需的流量。 2. 操纵阀调速控制时,调速受负载压力变化和油泵流量变化的影响,难以操纵控制。 3. 单泵供多执行器:当多执行器同时动作时,要求相互不干涉,能够操纵各执行器按所需流量供油。合理地分配流量,实现理想复合动作。 4. 液压泵和原动机的匹配问题,能充分利用原动机的功率,保持在发动机最大功率点工作,同时能防止发动机熄火,为了减少能耗节能,要求液压泵和发动机在联合工作最经济点上工作。 为了解决以上问题,60年代提出液压传动控制新概念—负载敏感和压力补偿。 目前液压传动仍存在问题有待解决。例如液压传动遵循帕斯卡原理,一个泵供多个执行器时,系统压力由克服各负载中所需最大压力来确定,因此供给负载较低的执行器时必然存在压力损失。目前人们正在研究采用电路中变压器这类东西,来解决这个问题。 (二)负载敏感和压力补偿的定义:负载敏感是一个系统概念,因此应称为负载敏感系统,可把它看作是一个意义广泛的名词。(即广义的负载敏感和压力补偿)。 负载敏感通过感应检测出负载压力,流量和功率变化信号,向液压系统进行回馈,实现节能控制、流量和调速控制、恒力矩控制、力矩限制、恒功率控制、功率限制、转速限制、同时动作和与原动机动力匹配等控制的总称。负载敏感系统所采用的控制方式包括液压控制和电子控制。 从负载敏感系统的液压组件来看可分: 负载敏感阀:将压力、流量和功率变化信号,向阀进行回馈,实现控制功能的阀。 负载敏感泵:将压力、流量和功率变化信号,向泵进行回馈,实现控制功能的泵和马达。负载敏感系统可降低液压系统能耗,提高机械生产率,改善系统可控性,降低系统油温,延长液压系统寿命。 压力补偿: 将压差设定为规定值进行的自动控制都叫压力补偿。 压力补偿流量控制:不受负荷压力变化和液压泵流量变化的影响,由设定节流压差值 对流量进行自动控制,称为压力补偿流量控制。 在节流调速中,根据流量基本计算式,,压差保持不变(常数),只要调节阀口面积(反映在k上)就能控制通过阀的流量,通过改变阀的开度,不受负载和液压泵流量影响,改变和控制流量,利用流量控制阀的原理来进行调速,提出了压力补偿概念。在节流口上,并联或串联一个压力补偿器。 (三)开中心直通型油路系统存在的问题。 前面已经谈到挖掘机开心式油路都采用六通多路阀,有二条供油路,直通供油路可组成优先油路,中位时直通回油箱进行卸载。并联供油路,组成并联油路,把二种油路采用各种方式组成起来,就构成了复杂多变的挖掘机油路。 操纵阀的结构简图和符号图如图1所示。
Chroma 6310系列电子负载操作指导书 1 前言和目的 本文阐明了Chroma 6310系列电子负载操作方法,便于实际的操作使用。 2 适用范围 适用于Chroma 6310系列电子负载的使用操作。 3 操作规程 仪器简介 Chroma 6310系列电子负载6314插框可以放下四路电子负载,6312可以放下两路负载模块(63102、63103、63105、63107……),包括一个处理器,GPIB接口、RS-232接口、控制面板、以及显示器和PASS/FAIL信号。具有SAVE/RECALL功能,可以储存100份文件,10个程序、一个缺省默认设计。各路负载模块可以各自工作在CC、CR、CV三种模式,每个模块都具有一个或者两个通道(63103、63106为当通道模块,63102、63107为双通道模块),每个通道都有自己的编号(1~8),可以各自独立地turn on/ turn off,或short-circuited。如果一个模块带载不够还可以将模块并联提高带载能力,当四路都加载时最大功率可达1200W。其中控制面板有三个键都可以实现两个功能,将SHIFT 键与该键同时按下就可以实现另外一个功能。 插框面板按钮介绍 1.电源开关 2.LCD显示器 3.通道显示 4.功能键 CHAN:选定通道进行设置 MODE:用来选择带载模式(CC、CR、CV) PROG:用来编辑一组带载程序或者运行一组带载程序。 CLEAR:当数字输入错误后,按该键可以清除。 RECALL:可以用来调用先前存储的负载设置。 SAVE:当你设置好一种负载后可以使用该键保存到一个程序里面(1to10),下次使用可以通过RECALL(1to10)调用。存储/调用(SAVE/RECALL)该系列负载可以对各路负载设定值按顺序储存在一个文件里,下次再要用到该系列负载时可以将此文件调用出来,如你要将已经设定好好的负载值储存到1号文件里,则只需按SAVE,然后按方向键,当显示器出现 SAVE PROGRAM 1:YES 2:NO时,按键“1”存储,当下次要再次调用该系列负载时,只需按RECALL,1,ENTER,则所有通道的设定值都回被条用出来,然后按LOAD即可加载。
三位六通换向控制阀块 (open center) 液压控制技术 在液压控制技术起初,加工机械厂的加工运动的速度取决于控制阀的横截面及液压流体的粘度。 对于速度的灵敏控制只能通过严格操纵才能实现。 接着,根据3位6通换向阀的原理对第一个控制阀块做一个重大改进,就使得一个机床工人同时相应地控制几个加工运动成为可能。 下面用M1控制阀块的例子来图解这个工作原理 M1单阀块截面图
在阀杆中位,油液通过铸造的通道无压的从P口流到T口(中位循环),泵和执行机构工作油路的接口A和B连接切断。可利用机械式的手柄或依靠液压方式在a1或b1口引入先导压力,使阀杆离开中位而移动。 依靠阀杆的换向和对阀杆的控制,减少P口到T口连接的通道,随着其进一步位移,进一步减少流通面积,使流阻增大(流通面积的缩减导致流阻的增加),以至于压力因此增加。随着从P口到T口的流通面积减少,P口到A口或P口到B口的连接通道将打开,液体将流到执行器接口。当由于压力和液压缸面积产生的力超过作用在液压缸上的负载外力时,油缸开始移动。P→A(或P→B)的流通面积直接决定了流量,从而也决定了液压缸或液压马达的速度。安全阀限制系统最高压力,活塞上单向阀能防止阀杆在中位时油缸下降。 以上所述的工作原理同样适用于几个阀杆,根据液压泵提供有效流量,所有操作能从停止到最大速度相应并行地受到控制。 三位六通换向阀的控制原理,也称作“节流控制”,它在元件布置方面是简单的,操作可靠,经济划算,系统可使用定量或变量泵。缺点是节流调速时,有部分多余的压力油直接回油箱,造成功率损失。 而且,其控制特点是与压力相关的,在并联油路几个执行机构同时动作时,可能彼此互相影响。 这就是开发与负载压力无关的负载传感系统的决定性原因。 负载传感系统 同样就负载传感系统而言,执行机构的速度是由控制块主阀芯的位置决定的。打开的通量截面较大也就意味着速度较高。最基本的差异是用负载传感,流量是可控的。 泵只需要提供当前所需的流量,其功能是通过把从液压控制系统的压力反馈到泵上来实现的。 该泵设计成控制器在系统能以恒定的标准值来保持一定的压力差,以输出所需的流量。 负载传感控制阀0块设计为每个阀杆上都带有一个额外的流量控制部件。压力补偿阀使 Steuer - Regl
简易直流电子负载设计报告 摘要:本文论述了简易直流电子负载的设计思路和过程。直流电子负载采用MSP430G2553单片机作为系统的控制芯片,可实现以下功能:在恒流(CC)模式下,不管电子负载两端电压是否变化,流过电子负载的电流为一个设定的恒定值。AD模块接收电路电压和电流模拟信号,转化为数字信号,经液晶模块12864同步显示电压和电流。系统包括控制电路(MCU)、驱动隔离电路(PWM波)、主电路、采样电路、显示电路、基准电路等;具有过压保护功能;能够检测被测电源的电流值、电压值;具有直流稳压电源负载调整率自动测量功能;各个参数都能直观的在液晶模块上显示。 关键词:电子负载;单片机(MCU);模数(A/D).PWM波. 一、引言 电子负载用于测试直流稳压电源的调整率,电池放电特性等场合,是利用电子元件吸收电能并将其消耗的一种负载。电子元件一般为功率场效应管(Power MOS)、绝缘栅双极型晶体管(IGBT)等功率半导体器件。由于采用了功率半导体器件替代电阻等作为电能消耗的载体,使得负载的调节和控制易于实现,能达到很高的调节精度和稳定性。同时通过灵活多样的调节和控制方法,不仅可以模拟实际的负载情况,还可以模拟一些特殊的负载波形曲线,测试电源设备的动态和瞬态特性。 二,总体方案论证与设计 设计和制作一台电子负载,在恒流(CC)模式下,不管电子负载两端电压是否变化,流过电子负载的电流为一个设定的恒定值。 要求: (1)负载工作模式:恒流(CC)模式; (2)电压设置范围:0~10V; (3)电流设置范围:100mA~1000mA,设置分辨率为10mA,设置精度为±1%; (4)直流稳压电源负载调整率:测量范围为0.1%~19.9%,测量精度为±1%。 (5)显示分辨能力及误差:至少具有3位数,相对误差小于5%。 恒流模块和恒压模块共用一个基准电压12v,并且通过开关实现两种模式的转换,用A/D转换器把电路中的电压电流的模拟信号转换为数字信号,然后通过单片机来程控从而重置电压电流,用数码管液晶显示同时呈现即时电压电流。原理图如下所示。
电子负载仪的设计 来源:电子技术应用2013年第8期 作者:谭承君, 曾国强, 刘玺尧, 罗 群, 龚春慧, 吴 刚 2013/10/11 11:02:50 关键词: avr电子负载PI闭环调节PWM波控制恒流恒阻恒功率 摘 要: 以增强AVR RISC结构的ATmega16控制器为核心,设计并制作了直流电子负载仪。系统通过斜波发生器产生的锯齿波和电流采样信号与控制信号的误差信号作比较产生约20 kHz的PWM波控制MOSFET管工作,然后经过误差放大器的PI调节构成闭环负反馈控制环路,实现恒流。恒阻和恒压模式通过软件实时调节流过MOS管电路的电流实现。实测数据显示,系统恒流模式下精度在1%以内,恒阻与恒功率模式下精度在3%以内。 关键词: 电子负载;PI闭环调节;PWM波控制;恒流;恒阻;恒功率 随着社会发展,电源技术已经发生了巨大变化。对于低压直流电源来讲,如何准确、快速测试其带负载能力是电源界一直研究的问题。传统测试方法一般都采用电阻、滑线变阻器等充当测试负载,但这些负载不能满足对负载多方面的要求[1-2],如恒定电流的负载[3]、随意调节的负载、恒功率的负载、动态负载等。本文将电子技术和微控制技术引入负载装置,设计并制作了用于测量低压直流电源带负载能力的装置——电子负载。系统的MOS管工作在开关状态,与参考文献[4]的设计方案刚好相反,系统可以实现恒流、恒阻、恒功率等模式,可接受最大输入电压为100 V,恒流模式下最大恒流值为10 A,精度在1%以内;恒阻模式下最小恒阻值为0.32 Ω,精度在3%以内;恒功率模式下最大可设定功率为100 W,精度在3%以内。目前该电子负载已投入使用,取得了良好效果。 1 系统结构设计 系统主要由斜波发生器、PWM波产生驱动电路、能量耗散电路、电流/电压采样电路、误差放大电路、微控制器等组成。其原理框图如图1所示。
第十二届“挑战杯”中国大学生课外学术科技作品竞赛江西赛区 参 赛 作 品 作品名称:电子负载机的设计 参赛姓名:肖新清、侯飞、邓玉龙 参赛类别:科技发明制作B类 二〇一一年四月
电子负载机的设计 目录 摘要 (2) 引言 (2) 1 电子负载的原理概述 (3) 1.1 定电流模式(CC mode) (3) 1.2 定电压模式(CV mode) (3) 1.3 定电阻模式(CR mode) (4) 1.4 定功率模式(CP mode) (4) 2 电子负载硬件系统设计 (4) 2.1 电子负载机设计模块方框图 (5) 2.2 单片机的选择及应用 (5) 2.3 D/A转换芯片 (6) 2.3.1 TLC5615的特点 (6) 2.3.2 TLC5615引脚说明 (6) 2.3.3 TLC5615的时序分析 (6) 2.4 A/D转换芯片 (7) 2.4.1 工作原理: (7) 2.4.2 输入的模拟量采样: (8) 2.4.3 数字量的传输: (8) 2.5 液晶显示模块 (9) 2.5.1 SPI接口时序写数据/命令 (10) 2.5.2 Nokia5110的初始化 (10) 2.5.3设置Nokia5110液晶的坐标 (10) 2.5.4 显示英文字符 (11) 2.5.5 显示汉字 (11) 2.6 MOSFET场效管的应用 (11) 2.6.1 MOS型场效应管的特点 (11) 2.6.2 MOS型场效应管的输出特性曲线 (11) 2.6.3 MOS型场效应管的选型 (12) 2.7 按键识别电路 (12) 2.8 集成运算放大器的应用 (13) 3 系统软件设计 (14) 3.1 主程序流程图 (14) 3.2 D/A基准电压输出子程序设计 (14) 3.3 电压电流检测程序设计 (14) 3.4 液晶显示子程序 (14) 3.5 键盘识别处理程序设计 (15) 结论 (16) 参考文献 (17) 附录A:整体电路原理图 (18) 附录B:负载机设计主程序 (18)
“简易直流电子负载”设计报告 摘要:本系统设计制作了一台恒流工作模式的简易直流电子负载。通过按键、LCD显示,AD/DA模块、恒流电路及功率器件搭建电路。运用MSP430G2553单片机精确控制恒流电流值,可以满足基本要求(1)、(2)、(3);自制了一个符合发挥部分(1)的稳压电源,通过测量达到了发挥部分(2)的要求,通过改变负载电阻Rw达到发挥部分(3)的要求。本系统能够把负载两端电压、流过负载电流和负载调整率直观的在LCD上显示,具有便携(电池供电),精确等特点。 关键字:恒流功率器件AD/DA MSP430G2553 负载调整率 一、模块设计方案 1.1 单片机系统 方案一、使用AT89C51单片机系统,At89C51是一个低功耗的CMOS8位单片机,片内含有4K bytes存储器和128bytes的随机数据存储器,片内集成通用8位中央处理器和ISP Flash存储单元。 方案二、使用MSP430g2553单片机系统,其可在1.8~3.6V的低电压范围内工作,具有超低功耗的特点;有5种节能方式和基本时钟模块配置;内置16位定时器,多达20个支持触摸感测的I/O引脚和欠压检测器,MSP430g2553功耗低。 综合考虑,方案二中单片机系统,性价比高,运行速度高;所以采用方案二。 1.2DA模块 方案一、使用DAC0832,最常用的器件,易于使用,硬件接口简单,编程容易,缺点精度只有8位,达不到设计要求。 方案二、TI公司生产的TLV5616。这是一个12位的数模转换器。带有灵活的4线串行接口,可以无缝连接TMS320,SPI,QSPI和Mircrowire串行口。数字和模拟电源分别供电,电压范围2.7V~5.5V。输出缓冲是2倍增益rail-to-rail输出放大器,输出放大器是AB类以提高稳定性和减少建立时间。rail-to-rail输出和关电方式非常单电源、电池供电应用。通过控制字可以优化建立时间和耗化比且精度达到设计要求。综合考虑,我们选用方案二。 1.3恒流电路模块 方案一、采用稳压器来构成恒流源,LM7805是三端固定式集成稳压器,输出的电流I=(Uo’/R1+I2);式中I2是7805的静态电流,数值非常之小,当R1较小I1较大时,I2可忽略不计;当R2变化时,LM7805改变自身的电压差来维持电压不变。该电路结构简单,但不能实现数控。如图1.
三位六通换向控制阀块 (open center) 液压控制技术 在液压控制技术起初,加工机械厂的加工运动的速度取决于控制阀的横截面及液压流体的粘度。 对于速度的灵敏控制只能通过严格操纵才能实现。 接着,根据3位6通换向阀的原理对第一个控制阀块做一个重大改进,就使得一个机床工人同时相应地控制几个加工运动成为可能。 下面用M1控制阀块的例子来图解这个工作原理 M1单阀块截面图
在阀杆中位,油液通过铸造的通道无压的从P口流到T口(中位循环),泵和执行机构工作油路的接口A和B连接切断。可利用机械式的手柄或依靠液压方式在a1或b1口引入先导压力,使阀杆离开中位而移动。 依靠阀杆的换向和对阀杆的控制,减少P口到T口连接的通道,随着其进一步位移,进一步减少流通面积,使流阻增大(流通面积的缩减导致流阻的增加),以至于压力因此增加。随着从P口到T口的流通面积减少,P口到A口或P口到B口的连接通道将打开,液体将流到执行器接口。当由于压力和液压缸面积产生的力超过作用在液压缸上的负载外力时,油缸开始移动。P→A(或P→B)的流通面积直接决定了流量,从而也决定了液压缸或液压马达的速度。安全阀限制系统最高压力,活塞上单向阀能防止阀杆在中位时油缸下降。 以上所述的工作原理同样适用于几个阀杆,根据液压泵提供有效流量,所有操作能从停止到最大速度相应并行地受到控制。 三位六通换向阀的控制原理,也称作“节流控制”,它在元件布置方面是简单的,操作可靠,经济划算,系统可使用定量或变量泵。缺点是节流调速时,有部分多余的压力油直接回油箱,造成功率损失。 而且,其控制特点是与压力相关的,在并联油路几个执行机构同时动作时,可能彼此互相影响。 这就是开发与负载压力无关的负载传感系统的决定性原因。 负载传感系统 同样就负载传感系统而言,执行机构的速度是由控制块内主阀芯的位置决定的。打开的通量截面较大也就意味着速度较高。最基本的差异是用负载传感,流量是可控的。 泵只需要提供当前所需的流量,其功能是通过把从液压控制系统的压力反馈到泵上来实现的。 该泵设计成控制器在系统内能以恒定的标准值来保持一定的压力差,以输出所需的流量。 Steuer- block Regl
第28卷第5期2011年5月 机 电 工 程 Journal o fM echan ica l&E l ectrical Eng i nee ri ng V o.l 28N o .5M ay 2011 收稿日期:2010-12-03 基金项目:浙江省重大科技专项和优先主题计划资助项目(2007C11171) 作者简介:马 冲(1986-),男,江苏徐州人,主要从事变量柱塞泵方面的研究.E m ai:l m chseu@126.co m 通信联系人:孔晓武,男,副教授,硕士生导师.E ma i :l x w kong @yahoo .co https://www.doczj.com/doc/231036090.html, 负载敏感液压泵稳定性仿真与参数优化 * 马 冲,孔晓武 * (浙江大学流体传动与控制国家重点实验室,浙江杭州310027) 摘要:针对负载敏感泵压力偏差较大与稳定性差的问题,基于Pro /E 、ADAM S 以及AM ESi m 专业仿真软件建立了负载敏感液压泵的虚拟样机。通过理论分析与仿真,提出了负载敏感液压泵变量机构控制系统中阻尼孔和容腔的参数匹配方法,基于该方法对56cc /r 的负载敏感液压泵进行了优化,得到了较好的阻尼孔和容腔的匹配效果。最后,通过试验验证了仿真分析的正确性。研究结果表明,参数优化后的负载敏感液压泵具有较好的稳定性,降低了恒压控制的压力偏差以及压力波动。关键词:负载敏感液压泵;阻尼孔;稳定性;压力偏差;参数优化中图分类号:TH 322 文献标志码:A 文章编号:1001-4551(2011)05-0548-05 Stability si m ulation and para m eter opti m ization of load sensing pu mp MA Chong ,KONG X i ao wu (State K ey Lab o f Fluid Pow er Trans m issi o n and Contro,l Zhe ji a ng University ,H angzhou 310027,Ch i n a) Abstrac t :A i m i ng at t he prob l em that t he larg e pressure b i as and the poor stability o f the l oad sensi ng pu m p ,a virtual pro totype of a l oad sensing pu m p w as developed by co m b i ni ng P ro /E ,ADAM S and AM ES i m .Through ana l y zi ng t he pu mp s wo rking pri nc i ple and the si m u l a ti on resu lts ,a m e t hod t hat how to m a tch the volu m e and the d i am eter of da m pi ng or ifi ces w as reached .B ased on th i s m e t hod ,the 56cc /r l oad sensing pump was op ti m ized ,and the better m atch effect of vo l ume and da m pi ng or ifi ce was gotten .T he feas i bility and effectiveness of this m ethod were ver ifi ed through m any experi m ents .The resu lts i ndicate that t he l oad sens i ng pump opti m ized show s a stab le perfor m ance ,and the output pressure b ias and v i bra ti on are decreased i n high pressure conditi on . K ey word s :load sensi ng pu m p ;damp i ng or ifice ;stability ;pressure bias ;para m ete r opti m i zati on 0 引 言 电液比例负载敏感变量泵能够在负载压力变化的情况下输出恒定的流量,并且在负载压力升高到一定值时,泵输出流量自动减小到仅维持泵的输出压力恒定。这样的特性应用在注塑机上起到了很好的节能效果,工作效率较高。 计算机仿真技术的应用提高了研究效率,缩短了研究周期,给研究提供了很大的方便。文献[1]利用计算机仿真技术研究了压力控制变量泵的动态响应,发现高压时泵输出压力和变量柱塞腔的压力波动较大,斜盘倾角同样存在振荡现象。文献[2]对压力流 量复合控制变量泵控制元件的模型进行优化,利用S i m ulink 仿真对系统进行性能预测和分析,但是柱塞泵的模型较为简化。文献[3]采用AMES i m 对负载敏感泵进行建模,仿真分析了负载敏感阀的弹簧刚度、开口形状以及附加阻尼对负载敏感泵动态特性的影响,但仿真模型也采用了较简化的柱塞泵模型。文献[4]主要介绍了ADAM S /AMES i m 联合仿真技术方法,利用两个软件的各自的优势,考虑了传统仿真方法中容易忽略的参数,提供了变量柱塞泵较为真实的仿真结果。文献[5]采用虚拟样机技术,分析了配油盘位置与压力冲击,泵出口容积对压力脉动影响,以及柱塞运动特性与主轴应力应变情况。
Eaton? 中 等负载柱塞泵(斜盘-轴向) 负载敏感(LS)控制系统 工作原理与操作 ——Load Sensing Sytem-Principle and Operation 王清岩[译] CCE(JLU,CHINA)15-09-2005
Load Sensing Principle of Operation Page 序言 (3) 何谓负载敏感? (4) 负载敏感系统是如何工作的 (5) 采用负载敏感控制的优点 (14) 开发与调试 (25) 系统比较 (26) 应用 (27) 负载敏感控制技术的前景 (27)
Load Sensing Principle of Operation 序言 早在二十世纪六十年代后期,一些年轻的工程师对液压传动技术的优缺点进行了仔细的分析。中位开放式液压系统,采用了一个定排量的齿轮泵,提供恒定的流量,系统压力是由作用于工作介质上的载荷决定的。为限制系统的最高工作压力,必须设置一个高压溢流阀。当系统工作压力达到设定值,液压泵近乎全部流量将通过溢流阀流回油箱,因而导致极高的功率损失,并在系统中产生大量的热损耗致使系统效率极低。 相比之下中位封闭的液压系统具有排量可调的优点,排量调节的范围可从最小排量至最大排量,甚至正向最大排量至反向最大排量;并且无需在系统中设置溢流阀。其最大工作压力的控制是通过液压泵内部的补偿器实现的。此类补偿器可在系统因负载超出额定范围导致系统受到阻滞的状态下通过限压变量活塞使泵卸荷即液压泵处于高压运转状态、但排量近乎为零。此时液压泵将进入等待状态,并保持较高的工作压力,直至负载被克服或恢复操作阀的控制状态。中位闭式系统的缺点是液压泵试图在所有的工况下均实现所限定的最高工作压力附近的排量调节。 但是液压系统还有这样一类工况,即期望获得较大的流量而所要求的工作压力却很低。中位闭式的系统在此种工况下导致了较高的压力降并在能量损失过程中产生大量的热。 工程师们于是设想,若能将两种系统的优点进行合并将得到最佳的性能。理想的系统应具有这样一种特性:在载荷需要的工作压力下仅提供维持系统工作的必要流量。期望流量与工作压力二者都是可变的,但是无论开式还是闭式系统均未提供这样的工作性能。为实现这一特性,必须设计一种新型液压泵,该泵可以根据系统需求提供必要的的流量及压力,并在工况变化时,具有相应的压力-流量调节功能。显然,一种柱塞式变量泵是实现此种功能的基础元件,但是如何令其同时响应压力和流量两个参数的变化呢? 一位从事本项目研究的工程师开发了一种新的液压补偿器以同时感应系统压力和流量的需求,并使柱塞泵能对流量压力需求的变化做出正确响应。负载敏感液压泵从此诞生了!从技术角度讲,这是一种压力-流量补偿式的变排量柱塞式液压泵。
直流电子负载设计基础 电子负载基本工作原理: 1.恒压模式 2.恒流模式 3.恒阻模式 4.恒功率模式 恒流 图中R1为限流电阻,R1上的电压被限制约0.7V,所以改变R1的阻值就可以改变恒流值,在上图中 我们知道,在串联电路中,各点电流相同,电路要恒流工作,只要在串联回路里控制流过一个元 件的电流就可以达到我们所控制的恒流输出。 上图是一个简易的恒流电路,通常用在一些功率较小及要求不高的场合里应用,那么在一些应用 中这种电路就无能为力了,如:在输入电压为1V输入电流为30A,那么对于这样的要求这样的电 根本无法保证工作。这样的电路调节输出电流也不是很方便。
这个图是一个最常用的恒流电路,这样的电路更容易获得稳定及精确的电流值,R3为取样电阻,VREF是给定信 号,电路工作原理是:当给定一个信号时VREF,如果R3上的电压小于VREF,也就是OP07的-IN小于+IN,OP07加输出大,使MOS加大导通使R3的电流加大。如果R3上的电压大于VREF时,-IN大于+IN,OP07减小输出,也就降了R3上的电流,这样电路最终维持在恒定的给值上,也就实现了恒流工作。 如给定VREF为10mV,R3为0.01欧时电路恒流为1A,改变VREF可改变恒流值,VREF可用电位器调节输入或用DAC 芯片由MCU控制输入,采用电位器可手动调节输出电流。如采用DAC输入可实现数控恒流电子负载。 电路仿真验证
在上图中我们给定了Vin为4V-12V变化的电压信号,VREF给定50mV 的电压信号,在仿真结果中输入电流一真保持在5A,电路实现了恒流 作用。 恒压电路 一个简易的恒压电路,用一个稳压二极管就可以了。 这是一个很简易的图,输入电压被限制在10V,恒压电路在用于测试充 电器时是很有用的, 我们可以慢慢调节电压测试充电器的各种反应。图是10V是不可调的,请看下图可调直流 恒压电子负载电路:
简易直流电子负载设计报告 一,引言 在电路中,负载是指用来吸收电源供应器输出的电能量的装置,它将电源供应器输出的电能量吸收并转化为其他形式的能量储存或消耗掉。如电炉子将电能转化为热能;电灯将电能转化为光能;蓄电池将电能转化为化学能;电机将电能转化为动能。这些都是负载的真实表现形式。负载的种类繁多,但根据其在电路中表现的特性可分为阻性负载、容性负载、感性负载和混合性负载。在实验室,我们通常采用电阻、电容、电感等或它们的串并联组合,作为负载模拟真实的负载情况。进行电源设备的性能实验。电子负载是利用电子元件吸收电能并将其消耗的一种负载。电子元件一般为功率场效应管(Power MOS)、绝缘栅双极型晶体管(IGBT)等功率半导体器件。由于采用了功率半导体器件替代电阻等作为电能消耗的载体,使得负载的调节和控制易于实现,能达到很高的调节精度和稳定性。同时通过灵活多样的调节和控制方法,不仅可以模拟实际的负载情况,还可以模拟一些特殊的负载波形曲线,测试电源设备的动态和瞬态特性。这是电阻等负载形式所无法实现的。二,总体方案论证与设计 电子负载用于测试直流稳压电源、蓄电池等电源的性能。设计和制作一台电子负载,有恒流和和恒压两种模式,可手动切换。恒流方式时不论输入电压如何变化(在一定范围内),流过该电子负载的电流恒定,且电流值可设定。工作于恒压模式时,电子负载端电压保持恒定,且可设定,流入电子负载的电流随被测直流电源的电压变化而变化。外接12V稳压电路。 要求: (1)负载工作模式:恒压(CV)、恒流(CC)两种模式可选择。 (2)电压设置及读出范围:1.00V~20.0V。 (3)电流设置及读出范围:100mA~3.00A。 (4)显示分辨能力及误差:至少具有3位数,相对误差小于5%。 恒流模块和恒压模块共用一个基准电压12v,并且通过开关实现两种模式的转换,用 A/D转换器把电路中的电压电流的模拟信号转换为数字信号,然后通过单片机来程控从而重置电压电流,用数码管液晶显示同时呈现即时电压电流。原理图如下所示。