机载激光雷达数据后处理软件(LiDAR_Suite)简介
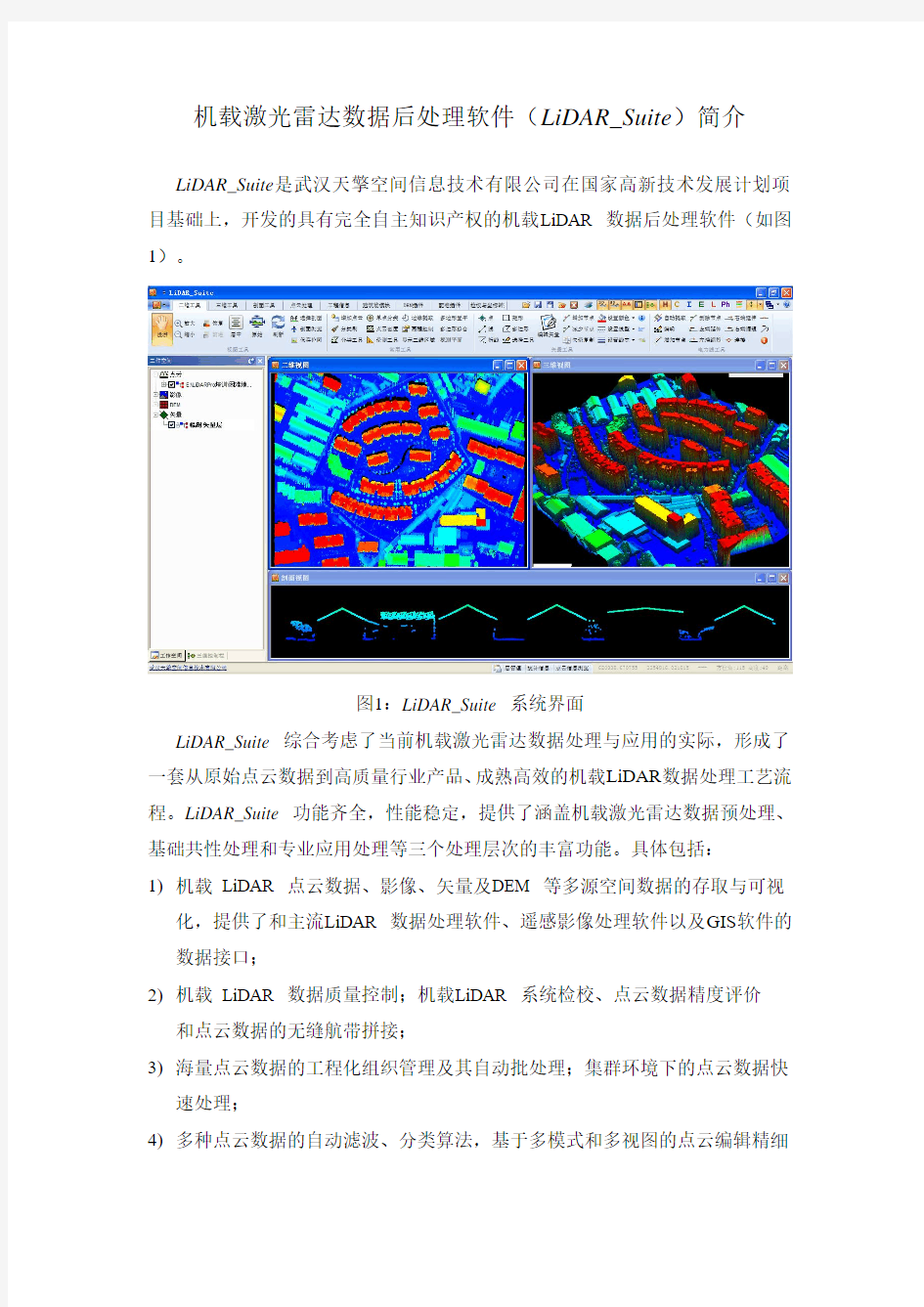
LiDAR_Suite是武汉天擎空间信息技术有限公司在国家高新技术发展计划项目基础上,开发的具有完全自主知识产权的机载LiDAR 数据后处理软件(如图1)。
图1:LiDAR_Suite 系统界面
LiDAR_Suite 综合考虑了当前机载激光雷达数据处理与应用的实际,形成了一套从原始点云数据到高质量行业产品、成熟高效的机载LiDAR数据处理工艺流程。LiDAR_Suite 功能齐全,性能稳定,提供了涵盖机载激光雷达数据预处理、基础共性处理和专业应用处理等三个处理层次的丰富功能。具体包括:
1)机载LiDAR 点云数据、影像、矢量及DEM 等多源空间数据的存取与可视
化,提供了和主流LiDAR 数据处理软件、遥感影像处理软件以及GIS软件的数据接口;
2)机载LiDAR 数据质量控制;机载LiDAR 系统检校、点云数据精度评价
和点云数据的无缝航带拼接;
3)海量点云数据的工程化组织管理及其自动批处理;集群环境下的点云数据快
速处理;
4)多种点云数据的自动滤波、分类算法,基于多模式和多视图的点云编辑精细
分类,多模式和可视化的分类精度评价;
5)基于机载LiDAR 点云的高质量数字高程模型和等高线生产;
6)面向机载LiDAR 同机航空数码相机的整区域快速正射影像生产;机载
LiDAR点云与非同机遥感影像的配准;
7)电力行业应用:电力线提取与建模、电力设施周边地物要素采集、危险点间
距量测等;
8)数字城市应用:独立的子模块Building Modeler,实现城市建筑物三维模型的
自动、半自动建立。
LiDAR_Suite采用了当前机载LiDAR最新数据处理技术,采用了模块化设计思想以及插件集成技术,在可视化、人机交互、易操作性、处理精度与效率等方面与现有商业化的主流机载激光雷达数据处理软件相比均具有一定的技术优势,并提供了灵活方便的、面向行业的二次开发功能。LiDAR_Suite兼顾了先进算法自动化处理和人机交互的作用,使系统更具实用性;面向专业应用提供了测绘生产、数字城市建模、电力行业应用等功能。目前,该软件已应用于实际的高精效测绘生产中,完成从原始点云数据到基础测绘产品生产(含DEM、DOM、等高线、部分DLG)以及产品精度评价的全部流程,效果良好(图2为数据生产工程管理示意图,图3为多模式和多视图的点云精细分类编辑示意图,图4为点云自动分类结果,图5为高精度DEM渲染结果,图6为电力悬链线的提取与建模,图7为建筑物半自动建模)。目前,LiDAR_Suite的生产处理成果已应用于国土、交通、水利等领域,并可望在更多领域如资源、环境、灾害、电力、农林等得到广泛应用。
图2 机载LiDAR数据生产工程管理
图3 多模式和多视图的点云精细分类编辑
图4为点云自动分类结果
图5 高精度DEM渲染模型
图6 电力悬链线的提取与建模
图7 建筑物半自动建模
激光雷达高速数据采集系统解决方案 0、引言 1、 当雷达探测到目标后, 可从回波中提取有关信息,如实现对目标的距离和空间角度定位,并由其距离和角度随时间变化的规律中得到目标位置的变化率,由此对目标实现跟踪; 雷达的测量如果能在一维或多维上有足够的分辨力, 则可得到目标尺寸和形状的信息; 采用不同的极化方法,可测量目标形状的对称性。雷达还可测定目标的表面粗糙度及介电特性等。接下来坤驰科技将为您具体介绍一下激光雷达在数据采集方面的研究。 1、雷达原理 目标标记: 目标在空间、陆地或海面上的位置, 可以用多种坐标系来表示。在雷达应用中, 测定目标坐标常采用极(球)坐标系统, 如图1.1所示。图中, 空间任一目标P所在位置可用下列三个坐标确定: 1、目标的斜距R; 2、方位角α;仰角β。 如需要知道目标的高度和水平距离, 那么利用圆柱坐标系统就比较方便。在这种系统中, 目标的位置由以下三个坐标来确定: 水平距离D,方位角α,高度H。 图1.1 用极(球)坐标系统表示目标位置
系统原理: 由雷达发射机产生的电磁能, 经收发开关后传输给天线, 再由天线将此电磁能定向辐射于大气中。电磁能在大气中以光速传播, 如果目标恰好位于定向天线的波束内, 则它将要截取一部分电磁能。目标将被截取的电磁能向各方向散射, 其中部分散射的能量朝向雷达接收方向。雷达天线搜集到这部分散射的电磁波后, 就经传输线和收发开关馈给接收机。接收机将这微弱信号放大并经信号处理后即可获取所需信息, 并将结果送至终端显示。 图1.2 雷达系统原理图 测量方法 1).目标斜距的测量 雷达工作时, 发射机经天线向空间发射一串重复周期一定的高频脉冲。如果在电磁波传播的途径上有目标存在, 那么雷达就可以接收到由目标反射回来的回波。由于回波信号往返于雷达与目标之间, 它将滞后于发射脉冲一个时间tr, 如图1.3所示。 我们知道电磁波的能量是以光速传播的, 设目标的距离为 R, 则传播的距离等于光速乘上时间间隔, 即2R=ct r 或 2 r ct R
如何在CARD/1中利用点云数据进行项目设计 点云数据是利用激光雷达或其他专业测量仪器对实地进行扫描得到的带有颜色和三维坐标的大量点数据的集合。点云数据是目前国内外使用的最先进的测量数据形式。此数据可以真实的反映地形地貌,让设计者如同置身实地进行工程设计。点云数据,根据测量仪器的不同,点云数据有很多种格式,国外常见的有徕卡、瑞格、天宝等,国内常用的是激光雷达数据,其后缀为LAS。CARD/1能直接读取上述格式的点云数据。下面介绍如何在CARD/1中利用点云数据进行工程设计。 一、导入点云数据 首先,进入【测量】--【管理点云】,弹出边菜单,选择“新建”,弹出建立新点云的窗口, 输入一个名称(由字母和阿拉伯数字组成),可以给一个用于以后辨认的描述,点击确定,弹出读取点云数据的边菜单,这里可以读入多种格式的点云数据,需要根据已有点云数据的格式选择使用,现有点云数据位LAS格式,点击变菜单中的LAS格式进行读入,会弹出选择点云数据文件的对话框,选择窗体菜单中的外部文件,找到需要读入的LAS点云数据,点击打开。
出现导入点云数据的进度条,导入结束会提示导入的总点数,点击确定。 选择边菜单中的“预处理”,弹出对话框, 坐标及高程范围是系统自动获取的,无需修改,块大小是指系统将整个点云数据进行分块管理,每一个分块的面积大小,最小点数/最大点数指的是每一个分块管理的点个数。默认参数可以不用修改,也可以根据点云数据的大小情况来修改。点击确定,系统就会对点云数据进行分块处理。这一步必须做,否则系统无法显示点云数据。 二、显示点云数据 完成上述操作,点云数据就被成果导入到系统中。进入平面视图,设置数据显示,边菜单中勾选“点云数据”,即可看到点云数据平面图。 如果点云数据太大,显示速度慢,可以换一种方式显示,即绘制点云平面图,然后显示绘图对象,这样显示速度会快很多。可以进入【绘制图表】--【平面分页】,建立一个绘图需要的平面分页,可以建一个比较大的分页,包含整个点云区域。然后进入【绘制图表】--【建立点云平面】,在边菜单中点击“点云·选
机载激光雷达数据后处理软件(LiDAR_Suite)简介 LiDAR_Suite是武汉天擎空间信息技术有限公司在国家高新技术发展计划项目基础上,开发的具有完全自主知识产权的机载LiDAR 数据后处理软件(如图1)。 图1:LiDAR_Suite 系统界面 LiDAR_Suite 综合考虑了当前机载激光雷达数据处理与应用的实际,形成了一套从原始点云数据到高质量行业产品、成熟高效的机载LiDAR数据处理工艺流程。LiDAR_Suite 功能齐全,性能稳定,提供了涵盖机载激光雷达数据预处理、基础共性处理和专业应用处理等三个处理层次的丰富功能。具体包括: 1)机载LiDAR 点云数据、影像、矢量及DEM 等多源空间数据的存取与可视 化,提供了和主流LiDAR 数据处理软件、遥感影像处理软件以及GIS软件的数据接口; 2)机载LiDAR 数据质量控制;机载LiDAR 系统检校、点云数据精度评价 和点云数据的无缝航带拼接; 3)海量点云数据的工程化组织管理及其自动批处理;集群环境下的点云数据快 速处理; 4)多种点云数据的自动滤波、分类算法,基于多模式和多视图的点云编辑精细
分类,多模式和可视化的分类精度评价; 5)基于机载LiDAR 点云的高质量数字高程模型和等高线生产; 6)面向机载LiDAR 同机航空数码相机的整区域快速正射影像生产;机载 LiDAR点云与非同机遥感影像的配准; 7)电力行业应用:电力线提取与建模、电力设施周边地物要素采集、危险点间 距量测等; 8)数字城市应用:独立的子模块Building Modeler,实现城市建筑物三维模型的 自动、半自动建立。 LiDAR_Suite采用了当前机载LiDAR最新数据处理技术,采用了模块化设计思想以及插件集成技术,在可视化、人机交互、易操作性、处理精度与效率等方面与现有商业化的主流机载激光雷达数据处理软件相比均具有一定的技术优势,并提供了灵活方便的、面向行业的二次开发功能。LiDAR_Suite兼顾了先进算法自动化处理和人机交互的作用,使系统更具实用性;面向专业应用提供了测绘生产、数字城市建模、电力行业应用等功能。目前,该软件已应用于实际的高精效测绘生产中,完成从原始点云数据到基础测绘产品生产(含DEM、DOM、等高线、部分DLG)以及产品精度评价的全部流程,效果良好(图2为数据生产工程管理示意图,图3为多模式和多视图的点云精细分类编辑示意图,图4为点云自动分类结果,图5为高精度DEM渲染结果,图6为电力悬链线的提取与建模,图7为建筑物半自动建模)。目前,LiDAR_Suite的生产处理成果已应用于国土、交通、水利等领域,并可望在更多领域如资源、环境、灾害、电力、农林等得到广泛应用。
地面雷达数据处理系统设计 摘要:针对目前地面雷达数据处理中存在的目标多,机动性强,地面杂波强,虚警率高等问题,采用并设计了解速度模糊、点迹凝聚、航迹处理等算法,结合软件编程技术,对信号处理后的数据进行综合处理,经过雷达外场鉴定试验测试,数据处理使雷达的发现概率、虚警率、方位距离精度、速度分辨力等指标各提高了约十个百分点。 0 引言 数据处理作为雷达系统的一个重要组成部分,可以看成是雷达信号处理的后处理过程,可以对信号处理后的数据进行筛选,并且从零星探测的小目标进行综合分析,消除由杂波、虚假目标、干扰目标、诱饵目标等造成的虚假检测,提高对目标的发现概率,降低虚警率,对目标建立航迹,并预测目标运动方向、位置的后果,其精度和可靠性都高于雷达的一次观测,改善雷达信号处理结果,使雷达的使用价值和性能得以提高。 早期的雷达数据处理方法有最小二乘法、现代滤波理论、Kalman滤波、机动目标跟踪方法等。目前对雷达数据处理的研究,特别是航迹处理部分,大多都是对付空中目标和海上目标的,这样的目标机动性不强,背景简单,容易预测航迹。而地面目标具有强机动性、情况复杂、目标种类繁多、同一范围内目标遮挡等环境干扰因素较多,这些对目标的检测、归并、凝聚、建航都提出了高的要求。需要对以前在航空和航海领域应用较多的航迹处理方法进行发展和完善,发展出适合强机动目标的改良算法。 随着信息技术的发展,雷达数据处理的研究有以下几个发展方向:弱小目标的自动跟踪,可利用帧间滤波、检测前跟踪和先进算法来提升自动跟踪性能;高速计算与并行处理;多传感器信息融合与控制一体化;搜索、跟踪、引导、识别与指挥一体化。 1 数据处理的系统设计 雷达数据处理采用计算机作为载体,通过编写数据处理软件来实现,计算机能够非常灵活地完成各种类型的数据处理工作;数据处理的软件化也能使整个雷达系统的兼容性和可扩展性更强,功能更完善,界面更友好。 数据处理软件完成的功能主要包括:采集数据(信号处理的目标数据、定北数据、定位数据),对信号处理后的目标数据进行格式转换、点迹凝聚等优选目标数据后形成更加准确、精确的目标点迹数据;对点迹数据进行航迹处理后形成目标的航迹;把处理后的目标点迹、航迹数据进行输出。数据处理功能。 在研究和参考已有雷达数据处理算法的基础上,对模拟目标数据、同类型其他雷达试验中录取的实际目标数据进行了仿真处理,根据处理结果,对已有算法进行修改完善,以适用本雷达技术特点和指标的要求。 2 点迹形成的算法设计 由于雷达波束在连续扫描时,波束波瓣有一定宽度,至少有好几个脉冲连续扫到目标,每个脉冲都对应一个方位值,同一目标被捕捉到多次,多次捕获目标时的方位值都不同,这就造成了方位角的分裂程度较大。因此需要把一次扫描中同一目标的多个点迹凝聚成一个点迹。先在距离上进行凝聚,得到水平波瓣内不同方位上的距离值;再在方位上凝聚,可获得惟一方位估计值;然后把距离值进行线性内插获得惟一的距离估计值。 (1)同一目标在距离上的凝聚处理,需将在距离上连续或间隔一个量化单元的点迹按照式(1)求取质心,将质心作为目标点迹的距离估计值: 式中:n为目标的点迹个数;Ri,Vi分别为第i个目标点迹的距离和回波幅度值。 (2)同一目标在方位上的凝聚处理,需将在方位上相邻的点迹按照式(2)求取质心,将质心作
激光雷达回波信号仿真模拟研究 摘要 关键字 第一章绪论 第一节引言 激光雷达(Lidar:Li ght D etection A nd R anging),是一种用激光器作为辐射源的雷达,是激光技术与雷达技术完美结合的产物。激光雷达的最基本的工作原理与我们常见的普通雷达基本一致,即由发射系统发射一个信号,信号到达作用目标后会产生一个回波信号,我们将回波信号经过收集处理后,就可以获得所需要的信息。与普通雷达不同的是,激光雷达的发射信号是激光而普通雷达发射的信号是无线电波,两者在波长上相比,激光信号要短的多。由于激光的高频单色光的特性,激光雷达具有了许多普通雷达无法比拟的特点,比如分辨率高,测量、追踪精度高,抗电子干扰能力强,能够获得目标的多种图像,等等。因此,利用激光雷达对大气进行监测,收集、分析数据,建立一个大气环境预测理论模型,这将会成为研究气候变化和寻求解决对策的一项重要武器。 第二节本文的选题意义 由于投入巨大,在研制激光雷达实物之前,我们需要进行模拟与仿真研究,预测即将研制的激光雷达的各性能指标,评价总体方案的可行性。激光雷达回拨信号仿真模拟就是利用现代仿真技术,逼真的复现雷达回波信号的动态过程,它是现代计算机技术、数字模拟技术和激光雷达技术相结合的产物。仿真模拟的对象是激光雷达的探测没标以及它所处的环境,模拟的手段是利用计算机和相关设备以及相关程序,模拟的方式是复现包含着激光雷达目标和目标环境信息的雷达信号。通过激光雷达回波信号的仿真模拟,进而产生回波信号,我们可以在实际雷达系统前端不具备条件的情况下,对激光雷达系统的后级设备进行调试。 第三节本文的研究思路和结构安排 本文主要研究面向气象服务应用的大气激光雷达。笔者在熟悉激光雷达的基本工作原理的前提下,学习和熟悉各种参数对大气回波能量的影响,进而学习和掌握matlab编程语言,并且根据给定的激光雷达系统参数、大气参数和光学参数,以激光雷达方程为基础,通过仿真模拟得到理想状态下的大气回波信号。但是,在实际测量工作中,由于大气中的各种干扰,我们获得的回波信号并不和理想状态下的大气回波信号一致,因此,在本文的后期工作中,笔者根据已有的大量激光雷达实测信号与模拟信号对比,既能验证仿真模拟结果的准确性,又能应用于激光雷达的性能指标等方面的分析上,具有比较高的实际应用价值。 第二章激光雷达的原理 第一节激光雷达系统 一个标准的激光雷达系统应该包含以下部件:激光器、发射系统、接收系统、光学系统、信号处理系统以及显示系统。它的工作原理图我们可以用下图表示:
机载激光雷达数据处理 编制:深圳飞马机器人科技有限公司版本号:V0.1 日期:2019-3-22
版权声明 本文档版权由深圳飞马机器人科技有限公司所有。任何形式的拷贝或部分拷贝都是不允许的,除非是出于有保护的评价目的。 本文档由深圳飞马机器人科技有限公司提供。此信息只用于软件业务项目管理的成员或咨询专家。特别指出的是,本文档的内容在没有得到深圳飞马机器人科技有限公书面允许的情况下不能把全部或部分泄露给任何其它单位。
目录 机载激光雷达数据处理 (1) 1.概述 (5) 2.软件准备 (5) 3.数据整理 (6) 3.1.GPS数据 (6) 3.2.LIDAR原始数据 (7) 3.3.影像数据...........................................错误!未定义书签。 3.4.数据整理与存放..............................错误!未定义书签。 4.差分解算 (7) 4.1.GPS数据格式转换 (7) 4.2.影像POS数据处理..........................错误!未定义书签。 4.3.点云轨迹解算 (10) 5.影像数据处理..............................................错误!未定义书签。 6.点云数据预处理 (26) 6.1.新建项目 (26) 6.2.点云解算 (30) 6.3.数据检核 (31) 6.4.特征提取 (33) 6.5.航带平差 (34) 6.6.点云赋色 (35)
6.7.坐标转换 (36) 6.8.点云标准格式(LAS)导出 (38) 7.点云数据后处理 (39) 7.1.数据分块 (39) 7.2.噪声点滤除 (40) 7.3.分类编辑 (41) 7.4.DEM输出 (44) 7.5.EPS采集DLG (45) 7.6.基于点云采集DLG (51) 8.成果精度检查与汇交 (57) 8.1.点云精度检查 (58) 8.2.成果提交(只列出点云成果,不含影像) (58)
1 雷达子系统设备技术指标 (1)雷达天线 天线类型:X波段波导开缝天线 天线尺寸:≥18ft 天线增益:≥35dB 水平波宽:≤0.45°(-3dB) 垂直波宽:≥10° 天线转速:20r/min(转速可编程) 极化方式:水平线极化 付瓣电平:≤-26dB(±10°内) ≤-30dB(±10°外) 驻波比:≤1.25 马达:有保护、有告警 电源:380V/220V±10%,50Hz±5% (2)雷达收发机 发射功率:25kw 发射频率:9375±30MHz 脉冲宽度:40ns~80ns/250ns~1000ns可调 脉宽误差:≤10ns 脉冲前沿宽度:≤20ns 脉冲后沿宽度:≤30ns 重复频率:400~5000Hz可调 噪声系数:≤4dB 中放带宽:3~20MHz与脉冲宽度自适应 对数中放范围:≥120dB 镜像抑制:≥18dB
扇形发射区数:4 扇形发射分辨力:1° (3)雷达维修终端 CPU:最新双核处理器,主频率≥3.0GHz,支持二级缓存,二级缓存≥2M,处理器数量≥2 内存:≥2GB,支持ECC内存纠错技术 内存磁盘:≥120GB,接口SATA,转速≥10000rpm 主板:CPU插座与CPU匹配 内存插槽:≥3 外设接口:并口≥1,串口≥1,PS/2≥2,USB≥4显示器:液晶,17in,1280*1024 2
3雷达数据综合处理子系统设备技术指标 (1)雷达信号处理器 采样频率:≥60MHz 幅度量化:≥8bit 方位量化:≥8192 处理范围:≥30n mile(每个雷达站) 视频更新延迟时间:≤300ms 陆地掩膜单元:≤0.044° 杂波处理:相关处理、STC、CFAR及门限处理等(2)目标录取器 目标视频:数字视频(反映目标回波的大小、形状、幅度、运 动尾迹) 视频幅度:≥4bit 视频分辨力:≤3m(距离,最小值) ≤0.088°(方位,最小值) 标绘视频:计算目标的大小及轴向 最大模拟目标数:100个 (3)目标跟踪器 跟踪能力:≥700(动目标)+300(静目标) 跟踪性能:在跟踪目标航速≤70kn,跟踪目标加速度≤1kn/s, 跟踪目标转向率≤3o/s时,能保持稳定跟踪;在目 标航向和航速基本不变的情况下,当两个跟踪目标
本技术公开了一种基于无人船的雷达数据处理系统,包括数据采集模块以及数据处理模块;所述数据采集模块包括雷达传感器、遥感影像接收器、摄像模块、船体数据采集模块,所述数据采集模块将所采集的信息预处理后传输至数据处理模块;所述雷达传感器,所述雷达传感器发射电磁波对覆盖水域上的目标进行照射并接收其回波,获得目标跟踪数据并将接收到的电磁波处理为模拟信号。优点在于:本技术的数据处理模块通过模拟建模分析,计算出三维雷达数据,再通过激光雷达得到激光点云分类图、数字高程模型DEM、等高线、数字表面模型DSM、数字正射影像图DOM,最终计算出障碍物点得到障碍信息与前文所得障碍信息比对,保证最终得出的障碍信息准确无误。 权利要求书 1.一种基于无人船的雷达数据处理系统,其特征在于,包括数据采集模块以及数据处理模块; 所述数据采集模块包括雷达传感器、遥感影像接收器、摄像模块、船体数据采集模块,所述数据采集模块将所采集的信息预处理后传输至数据处理模块; 所述雷达传感器,所述雷达传感器发射电磁波对覆盖水域上的目标进行照射并接收其回波,获得目标跟踪数据并将接收到的电磁波处理为模拟信号; 所述遥感影像接收器,用于实时接收卫星下传的遥感影像,并转化为数字信号; 所述摄像模块,至少包括10个全景摄像机,其中至少50%的全景摄像机位于船体的前进方向,用于获取船体周边的视频数据,并转化为数字信号; 所述船体数据采集模块,用于获取船体的位置数据数据、船体的行驶速度数据和船体的加速度数据,并将其电信号转化为数字信号;
所述数据处理模块处理数据采集模块所传输的数据处理后得到障碍信息。 2.根据权利要求1所述的基于无人船的雷达数据处理系统,其特征在于,所述数据处理模块包括模拟建模分析: S1、通过NVIDIA Tegra K1移动处理器进行将雷达传感器所传输的模拟信号进行三维雷达数据转换; S2、通过激光雷达数据处理,得到激光点云数据分类图、数字高程模型DEM、等高线、数字表面模型DSM、数字正射影像图DOM,并将三维数据点投影到栅格地图上; 将所有栅格相对高度大于某个阈值的栅格设定为障碍物点,即得到障碍信息。 3.根据权利要求2所述的基于无人船的雷达数据处理系统,其特征在于,使用分布式计算系统存储雷达数据,通过建立MapReduce模型以云计算的方式对雷达数据进行高速处理,将处理结果与障碍信息进行比对,将一致信息输出,将不一致的信息重新导入步骤S1计算。 4.根据权利要求2所述的基于无人船的雷达数据处理系统,其特征在于,所述数据采集模块在将数据传输至数据处理模块时,按照同一时间戳为时间基准,对每路数据按各自的固有帧周期进行顺序编号,并在存储数据的同时将各路数据帧编号的对应关系存储下来。 5.根据权利要求2所述的基于无人船的雷达数据处理系统,其特征在于,遥感影像的处理步骤如下: 1)遥感影像接收器在接收遥感影像后,确定遥感影像的分辨率并截取,对截取遥感影像进行数据标注; 2)使用Canny边缘检测算法对截取的遥感影像进行预处理,通过对图像边缘进行提取,并将提取得到的图像与原图像叠加,突出航道特征,用以加速分析; 3)搭建图像分类模型,通过在对基础的网络进行分类任务的训练中,在网络的参数存留下低
雷达数据处理-雷达数据处理 雷达数据处理-正文 *从一系列雷达测量值中,利用参数估值理论估计目标的位置、速度、加速度等运动参数;进行目标航迹处理;选择、跟踪目标;形成各种变换、校正、显示、报告或控制等数据;估计某些与目标形体、表面物理特性有关的参数等。早期的一些雷达,采用模拟式解算装置进行数据处理。现代雷达已采用数字计算机完成这些任务。 数据格式化雷达数据的原始形式是一些电的和非电的模拟量,经接收系统处理后在计算机的输入端已变成数字量。数字化的雷达数据以一定格式组成雷达数据字。雷达数据字可编成若干个字段,每一个字段指定接纳某个时刻测量到的雷达数据。雷达数据字是各种数据处理作业的原始量,编好后即送入计算机存储器内的指定位置。 校正雷达系统的失调会造成设备的非线性和不一致性,使雷达数据产生系统误差,影响目标参数的无偏估计。为保证高质量的雷达数据,预先把一批校正补偿数据存储于计算机中。雷达工作时,根据测量值或系统的状态用某种查表公式确定校正量的存储地址,再用插值法对测量值进行校正和补偿,以清除或减少雷达数据的系统误差。 坐标变换雷达数据是在以雷达天线为原点的球坐标系中测出的,如距离、方位角、仰角等。为了综合比较由不同雷达或测量设备得到的目标数据,往往需要先把这些球坐标数据变换到某个参考坐标系中。常用直角坐标系作为参考坐标系。另外,在球坐标系中观察到的目标速度、加速度等状态参数是一些视在几何分量的合成,不能代表目标在惯性空间的运动特征。若数据处理也在雷达球坐标系中进行,会由于视在角加速度和更高阶导数的存在使数据处理复杂化,或者产生较大的误差。适当选择坐标系,可以简化目标运动方程,提高处理效率或数据质量。 跟踪滤波器跟踪滤波器是雷达数据处理系统的核心。它根据雷达测量值实时估计当前的目标位置、速度等运动参数并推算出下一次观察时目标位置的预报值。这种预报值在跟踪雷达中用来检验下一次观测值的合理性;在搜索雷达中用于航迹相关处理。常用的跟踪滤波器有α-β滤波器、卡尔曼滤波器和维纳滤波器,可根据拥有的计算资源、被处理的目标数、目标的动态特性、雷达参数和处理系统的精度要求等条件选用。α-β滤波器的优点是算法简单,容易实现,对于非机动飞行的等速运动目标,位置估值和速度估值的平方误差最小,故可对等速运动目标进行最佳滤波。对于机动飞行的目标,由于α-β滤波器描述的目标运动模型与实际情况存在差异,会产生较大的误差。为此,广泛采用一种称为机动检测器的检测装置,以便在发现目标作机动飞行时能自动调整测量周期或修改α值和β值,使跟踪误差保持在允许的范围内。同α-β滤波器不同,卡尔曼滤波器中除装有稳态的目标轨迹模型外,还设有测量误差模型和目标轨迹的随机抖动模型。因此,它对时变和非时变的目标动态系统能作出最佳线性、最小方差的无偏估计。除目标状态的估计外,卡尔曼滤波器还能估计状态估值的误差协方差矩阵。利用误差协方差矩阵可以检测目标机动,调整滤波系数,实现对机动目标的自适应滤波。 目标航迹处理早期的搜索雷达由操作员从显示器上判定目标的存在,并逐次报出目标的位置。标图员根据报告的目标数据进行标图,并把图上的点顺序连接,形成目标航迹。这个过程称为目标航迹处理。现代雷达系统的航迹处理已无需人工处理,而主要由计算机来完成。利用计算机进行数据处理的搜索雷达,称为边跟踪边扫描雷达系统。雷达测量到的离散
基于Terra Solid的机载激光雷达点云数据处理应用 发表时间:2019-06-20T11:45:12.637Z 来源:《基层建设》2019年第9期作者:姚思贤 [导读] 摘要:机载激光雷达(light detection and ranging,LiDAR)是于20世纪80年代发展起来的一种集全球定位系统、惯性导航系统与激光测距技术于一体的新型主动式空间信息获取技术。 中科遥感科技集团有限公司天津市 300300 摘要:机载激光雷达(light detection and ranging,LiDAR)是于20世纪80年代发展起来的一种集全球定位系统、惯性导航系统与激光测距技术于一体的新型主动式空间信息获取技术。它可直接获取地面目标的三维坐标,不受阴影和太阳高度角影响,并可与数字航摄仪相结合获取地物光谱、纹理信息,具有控制测量依赖性少、受天气影响小、自动化程度高、成图周期短等特点,基于TerraSolid系列软件构建完整的用于机载激光雷达点云数据处理的详细技术流程,通过优化处理流程提高其数据处理的效率和精度。对4组实验数据的处理结果表明,该技术具有较好的可行性和较高的工作效率。 关键词:基于Terra Solid;机载激光雷达;点云数据;处理应用 1、前言 近几年,随着机载激光雷达硬件系统的快速发展,其产生的点云数据也变得更加精确,更加海量。在整个激光雷达的数据处理过程中,占60%~80%的点云数据分类工作已经成为制约LiDAR进一步应用发展的瓶颈问题,设计高效、高精度的海量点云数据处理流程意义十分重大。 2、基于Terra Solid的点云数据处理流程 目前的LiDAR数据处理技术、流程和方法还很不完善,使用TerraSolid软件实现机载LiDAR点云数据的处理,直至生成DEM产品的过程主要可以归为以下五大步骤。 2.1导入原始数据并建立项目流程 导入原始点云数据和建立项目是后面所有操作的阶石,具体操作步骤顺序如下: 1)设置坐标系。 2)导入飞行航线。 3)导入机载LiDAR点云数据,检查覆盖情况,确定点密度及单个作业Block大/]、(2GBRAM:5百万个点,4GBRAM:1.O~1.5千万个点)。 4)定义作业区。 5)裁切飞行航线(值得注意的是,航线不能自相交)。 6)定义项目(新建后要注意保存)。 7)定义作业分区Block(定义后,删除并在指定层重画Block)。 8)导入机载LiDAR点云数据点,生成分区存储的机载LiDAR数据点文件。 9)推测航线号并检查正确性。 2.2数据校正流程 原始数据在使用之前需要进行适当的数据校正处理,任何一个技术环节把握不当都将直接导致项目的失败。TerraSolid主要是用宏命令的方式帮助校正、平差、纠正相关数据项。详细流程如下: 1)创建用于数据校正的项目文件(注意只选择几个有不同坡向或多坡的Block区进行测试)。 2)装载TerraMatch模块。 3)运行“Measurematch”命令,量测相邻航线间的匹配差值。 4)运行“Findmatch”命令,计算3个角度偏转误差及镜向比例误差,保存改正数及误差报告。 5)运行“Applycorrection”命令,用上一步保存的改正数纠正整个项目区数据。 6)检查改正效果。 7)运行“Findmatch”计算Z误差(整个测区),保存改正数及误差报告。 8)选择整个项目,Solvefor:individuallines。 9)如果需要,对误差较大的航线调整其质量属性。 10)运行“Applycorrection”命令,用上一步保存的Z改正数纠正整个项目区数据。 11)检查改正效果。 12)运行“Findfluctuation”量测整个测区重叠部分的波动较差,保存改正数及误差报告。 13)对整个测区进行波动较差改正。 14)检查改正效果。 15)检查整体匹配效果。 2.3机载LiDAR点云数据的自动分类流程 机载LiDAR的点云数据的分类处理概括地分为自动分类处理和手动分类两部分。这项工作在整个机载LiDAR的数据后处理过程中占六到八成的T作量。下面详细介绍自动分类处理的流程: 1)删除重叠点(有的项目不需要删除)。 2)创建宏命令进行单航线地面点分类,由4个命令组成:①“Lowpointclassification”ingroups,即成组的低点分类。主要指明显低于地面的点,如在开着的检修井里的点、反射错误的点等。②“Lowpointclassification”singlepoints,即单个的低点分类。③“Groundclassification”,即地面点分类。④“Belowsurface”,即低于表面的点分类,在非常粗糙的区域稍低于地面的点。 3)运行于一个区,检查结果。在利用宏进行数据分类时,由于分类宏参数设置的偏差,会导致房屋有些地方分的不到位,有一些不属于房屋的点进入。这样在后期处理时就要多注意一些。所以宏的参数设置很重要,需要多试验几次再确定。
第47卷第1期(总第183期) 2018年3月 火控雷达技术 Fire Control Radar Technol 〇7 Vol .47 No . 1( Series 183) M ar . 2018 基于锐华嵌入式实时操作系统 雷达数据处理软件设计 李浩正罗利强周游杨璇畅言 (西安电子工程研究所西安710100) 【摘要】本文通过分析国内军用软件国产化的必要性,同时通过介绍锐华嵌入式实时操作系统(Re - Works ) 软件的特点和功能, 结合从事的雷达数据处理软件工作 ,设计了一种基于 R eW oks S 喿作系 统的数据处理软件,解决了工程中雷达数据处理软件过分依赖国外商用产品带来的隐患,具有较高 的军事价值。 关键词:雷达数据处理;国产嵌入式实时操作系统中图分类号:TN 957.52 文献标志码:A 文章编号:1008-8652 (2018) 01-054-04 Designof R /d/rD /ta Processing Software B/sedonRuihua Embedded Real-time Operating System Li Haozlieng # Luo Lif^iang # Zhou Y o u , Yang Xuan # Chang Yan (Xi^an Electronic Engineering Research Institute # Xi’an 710100) A bstract ; A data processing software based on Ruihua embedded real-time operat signed by analyzing necessity of localization of domestic military software and introducing feature Reworks software and combining with work of radar data processing software ,which can be used to solve hidden trouble caused by overdependence on foreign commercial products in radar data processing software in project . It is higher military value . K e y w o rd s ; radar data processing ; homebred embedded real-time operating system ReW o k s 操作系统[1]是国内某科研机构开发设 计的嵌人式操作系统,在我国部分军用产品上已经 逐步开始推广使用,本文在分析国产化嵌人式操作 系统R e W o k s 特点的基础上,设计了一种基于Re - W o k s 的数据处理软件,数据处理软件不仅继承了 原来风河公司V xW orks 的优点,而且国产化软件提 供了更丰富的调试手段,利于软件的开发设计。 1国产化实时操作系统( REWORKS ) 介绍 锐华嵌入式实时操作系统(R eW okS )是一款类 V x W o k s 系统,组件可裁剪,同时还兼容V x W o k s 。 〇引言 长期以来,在我军综合电子信息系统和武器系 统建设进程中,军事应用软件基本做到自主研制,但 军用关键软硬件过分依赖国外商用产品,这种不可 控的状况已成为我军战略安全的重大潜在威胁,严 重制约我军信息化武器装备体系的自主可持续发 展。目前国家正在实施自主可控战略,越来越多的 国产芯片、基础软件运用到武器装备中。在某些领 域,鉴于国产芯片与国外产品对比存在较大差距的 事实,在国产部分硬件无法满足需求的情况,可以先 实现基础软件的自主可控。 收稿日期=2018 -02-11 作者简介:李浩正(1986 -),男,硕士研究生。研究方向为雷达数据处理。
基于三维激光雷达技术的大比例尺地形图解决方案 一激光雷达技术 1.1 综述 激光雷达测量技术(LiDAR)是当今测绘业界先进的遥感测量手段,是继GPS空间定位系统之后又一项测绘技术新突破。自20世纪60年代末世界第一部激光雷达诞生以来,激光雷达技术作为一种重要的航空遥感技术,与成像光谱、成像雷达共同被誉为对地观测三大核心技术。迄今为止,激光雷达的研究与应用均取得了相当大的进展,已成为航空遥感领域主流之一,其应用已超出传统测量、遥感以及近景测量所覆盖的范围,成为一种独特的数据获取方式。LIDAR技术具有高精度、高分辨率、高自动化且高效率的优势,集激光扫描、全球定位系统和惯性导航系统技术于一身,同时配备高分辨率数码相机,可实现对目标的同步测量,生成高密度激光点云数据,已成为世界各国进行大面积地表数据采集的重要主流与趋势。与传统摄影测量技术相比,激光雷达技术生成三维信息更快、更准确,特别能穿透地表覆盖的森林植被快速获取地形信息的能力,具有其他技术无可比拟的优势。采用激光雷达技术获取地面及其覆盖物(植被、电力线等)的精确三维坐标,生成高精度地形信息,可作为土地利用、工程建设规划、城市管理、河海地形、水库大坝、山坡检测、防灾、矿业、农业、林业、公共管理等方面数字化、自动化等应用基础。 1.2 激光雷达技术基本原理 激光雷达是一种有效的主动遥感技术,通过发射激光脉冲及精准的量测回波所经过的时间计算传感器与目标物之间的距离,再结合飞行器姿态信息、位置信息进行相关解算和坐
标转换可以得到高精度的三维数据。机载激光雷达系统主要由飞行平台、激光测距系统、全球定位系统(GPS)、惯性导航系统(INS)以及相关的控制存储单元组成。 激光测距系统是激光雷达的核心组成部分,通过发射、接收激光信号可以精确测量发射器和目标物的距离。激光测距一般采用方式:脉冲测距和连续波的相位差测距。连续波激光器市场上较为少见,因此现有的激光雷达系统多采用脉冲测距的方式。通过激光器发射一束窄脉冲,与目标物接触后产生反射,并通过接收器接收回波信号。由于脉冲的速度已知(光速),接收器可以精确测量脉冲发射到接收到反射信号的时间,从而获得目标物与激光器的距离,其测量精度常常可以达到毫米级。 随着激光雷达技术的发展,激光雷达的飞行平台可以根据需要和实际作业条件进行多种选择,目前常见的搭载平台有小型飞机、固定翼飞机、直升飞机、无人机、动力三角翼、无人飞艇等。 激光雷达系统工作原
地质雷达软件RADAN用户手册 美国地球物理测量系统公司 美国劳雷工业公司 2010年10月
RADAN处理软件安装 安装采集软件RADAN66和RADAN5,并且激活采集软件 输入软件序列号serialnumber 输入处理软件产品ID代码:radan 计算获取软件激活码 Windows7系统安装radan5 安装radan程序,找到setup.exe鼠标右键要求以系统管理员身份运行; RADAN软件第一次运行要以系统管理员身份打开。 Windows7系统调整显示效果 选择控制面板->所有控制面板项->显示->更改配色方案->windows经典->高级,对话框如下: 选择颜色 项目->桌面->颜色->设置红绿蓝
资料整理 1打测量,布置网格和测线,数据采集 2数据拷贝与备份: 从地质雷达主机把数据复制在个人电脑上,并利用2种以上存储介质对原始数据进行备份。 3野外记录整理: 整理野外记录本(包括各种参数,利用数码相机或者扫描仪 对原始纪录扫描拍照,并制作成PDF格式文件便于日后随时查看野外现场原始资料),工作照片,收集的各种第三方资料(设计图纸、设计厚度、第三方检测资料),现场钻孔资料(里程桩号、芯样实物和照片、长度)。 利用钻孔资料反算电磁波传播速度或者材料介电常数。 4数据编辑与初步整理RADAN 5资料处理RADAN 6资料解释 7图片制作 8探测报告编写
IGSSI 地质雷达探测资料处理流程图 数据备份,资料整理,资料处理,资料解释 3文件编辑---剪切 4剖面方向调整 5距离归一化 6添加起始里程桩号 7剖面水平拉伸、压缩 8调整地面时间零点 10时间深度转换 2读入数据文件 (*.dzt) 1打开RADAN 软件 11增益调整 12叠加去噪 13背景去除 14一维垂直滤波 15反褶积 16偏移归位 17希尔伯特变换 静态校正 18高程修正 频谱分析 速度分析 19剖面追加 21交互式解释
机载激光雷达系统在测绘领域的应用 摘要:本文通过对国内外机载激光雷达的发展现状进行了分析,结合本单位激光雷达的实际应用和其特点,介绍了其在测绘等行业的应用,阐述了其对测绘领域带来的巨大变革和广阔前景。 关键词:4D测绘产品机载激光雷达激光点云 机载激光雷达系统(Light Detection And Ranging,简称LIDAR)是集全球定位系统(GPS)、惯性导航系统(IMU)、激光扫描系统、航空摄影系统的快速测量系统。它能够大面积、高分辨率、快速准确地获取地表各类地理信息,可实时快速获取高精度点云数据、数字地面模型(DTM)、数字表面模型(DSM)以及测区高程等数据成果。被测绘界认为是继全球定位系统(GPS)之后的重大技术革命,是当前测绘科技发展的国际前沿。 本文结合作者单位拥有的徕卡公司最新的ALS60机载激光雷达系统系统在测绘生产领域多个项目的实际应用情况,介绍了其对测绘领域带来的巨大变革和广阔前景。 国内外机载激光雷达的发展现状 机载激光雷达测量技术发展已经有二十余年的历史,从早期的美国宇宙航天激光测距到德国诞生的世界上第一个商用样机激光断面测量系统,发展到近些年来随着当今科技技术日新月异的进步,激光雷达系统更是得到了迅猛的发展,其在测绘市场的市场份额逐年快速增长。目前,全球已经有众多的商用系统在使用,如TopScan、Optech、Top Eye、Saab、Fli-map 、TopoSys、Hawk2Eye 等多种实用系统。具有代表性的系统主要有:德国IGI和奥地利RIGEL公司联合制的Lite Maper6800,美国alpha的SHOLAS和加拿大OPTECH的ALTM3100T,德国TopoSys的Falcon,以及美国Leica公司的Leica ALS50/60等。 上世纪90年代中后期至今,美国、德国、加拿大等国家,先后成功应用这项技术进行了地形测量、森林资源调查与评估、三维城市建模等试验与工程实践。特别是在芬兰和德国的应用更为广泛。 国内在地面三维激光扫描系统、车载激光雷达系统方面已有相关产品投入实际生产应用。但在机载激光雷达技术的硬件研究制造上国内外差距较大,现有技术基础比较薄弱。虽有原理样机的研制,但距实用化尤其是形成产品尚有一段距离。所以至今国内还没有成熟的机载激光雷达系统出现。 机载激光雷达在测绘等领域的应用 1. 机载激光雷达测量技术主要特点和性能
林业科学研究 2008,21(增刊):14~19 Forest Research 文章编号:100121498(2008)增刊20014206 点云密度对机载激光雷达林分高度反演的影响 3 庞 勇,李增元,谭炳香,刘清旺,赵 峰,周淑芳 (中国林业科学研究院资源信息研究所,北京 100091) 摘 要:以山东省泰安市徂徕山林场和重庆铁山坪林场为试验区,分别于2005年5月和2006年9月获取了低密度和高密度的L i D AR 点云数据,分别进行了林分平均高的反演试验。通过两个试验区的对比,分析了不同点云密度对机载L i D AR 数据反演林分参数的影响。结果表明:对于两种密度的点云数据,使用分位数法都可以很好地进行林分平均高的估计,高密度点云的反演结果略好一些,但二者结果差异不大;高密度的点云可以进行更小尺度的林分高估计和单木树高的估计,从而可以减少甚至避免对实地树高测量的依赖。关键词:L i D AR;点云密度;林分平均高中图分类号:S771.8 文献标识码:A 收稿日期:2007212209 基金项目:国家863课题(2007AA12Z173)、国家自然科学基金课题(40601070)、国家973课题(2007CB714404)、国家林业局948项目(200424264) 作者简介:庞勇(1976—),安徽省太和人,博士,助理研究员,主要从事合成孔径雷达和激光雷达对地观测机理和森林参数定量反演等方面的研究.Email:caf .pang@g mail .com 3本文作者感谢山东省泰安市徂徕山林场和重庆市铁山坪林场在外业调查中给予的大力支持和协作! The Effects of A i rborne L i D AR Po i n t D en sity on Forest He i ght Esti m a ti on PANG Yong,L I Zeng 2yuan,TAN B ing 2xiang,L I U Q ing 2w ang,ZHAO Feng,ZHOU Shu 2fang (Research I nstitute of Forest Res ource I nfor mati on Techniques,CAF,Beijing 100091,China ) Abstract:This paper takes Culaishan Forest Far m ,Shandong Pr ovince,and Tieshanp ing Forest Far m ,Chongqing,as test sites .The airborne discrete return L i D AR data were collected in May of 2005and Sep te mber of 2006seperately .The f orest height was esti m ated for both test sites .Thr ough the ca mparis on of the t w o sites,the effects of airborne L i D AR point density on f orest height esti m ati on were analyzed .The results de monstrated that it was feasible t o use l ow and high point density airborne L i D AR data t o esti m ate f orest height .Quartiles could give good tree height esti m ati on in the l ow L i D AR point density case .The accuracies fr om high density L i D AR data showeds only a little better than l ow density data .The high density data could be used t o esti m ate finer scale f orest height even individual tree height,which is hel pful t o m ini m ize necessity of the nu mber filed p l ots .Key words:L i D AR;point dansity;stand mean height 激光雷达L i D AR (L ight detecti on and ranging )是近年来国际上发展十分迅速的主动遥感技术,在森林参数的定量测量和反演上取得了成功的应用。激光雷达具有与被动光学遥感不同的成像机理,给林业遥感带来了重大突破,对植被空间结构和地形的探测能力很强,特别是对森林高度的探测能力,具有 明显的优势。近20年来,研究者发展提出了许多用 激光雷达数据反演林木参数的算法[1-4] ,极大推进了激光雷达在林业上的应用。小脚印的激光雷达系统已经成功地用于大范围的森林资源清查中[5] ,星载大脚印激光雷达已经在轨运行并成功地进行了全 球的数据获取[6] 。