一、无人机简介
1、常见无人机有:多旋翼、固定翼、直升机。
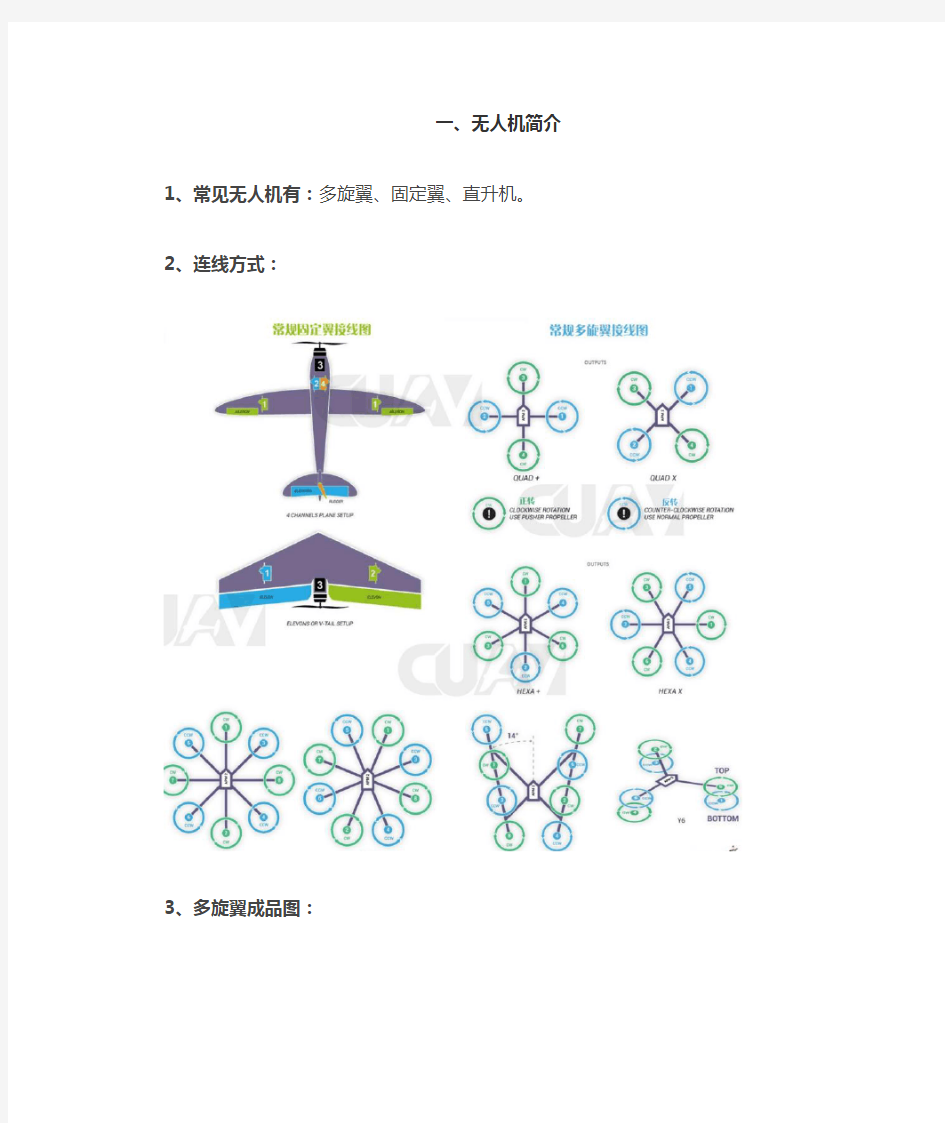
2、连线方式:
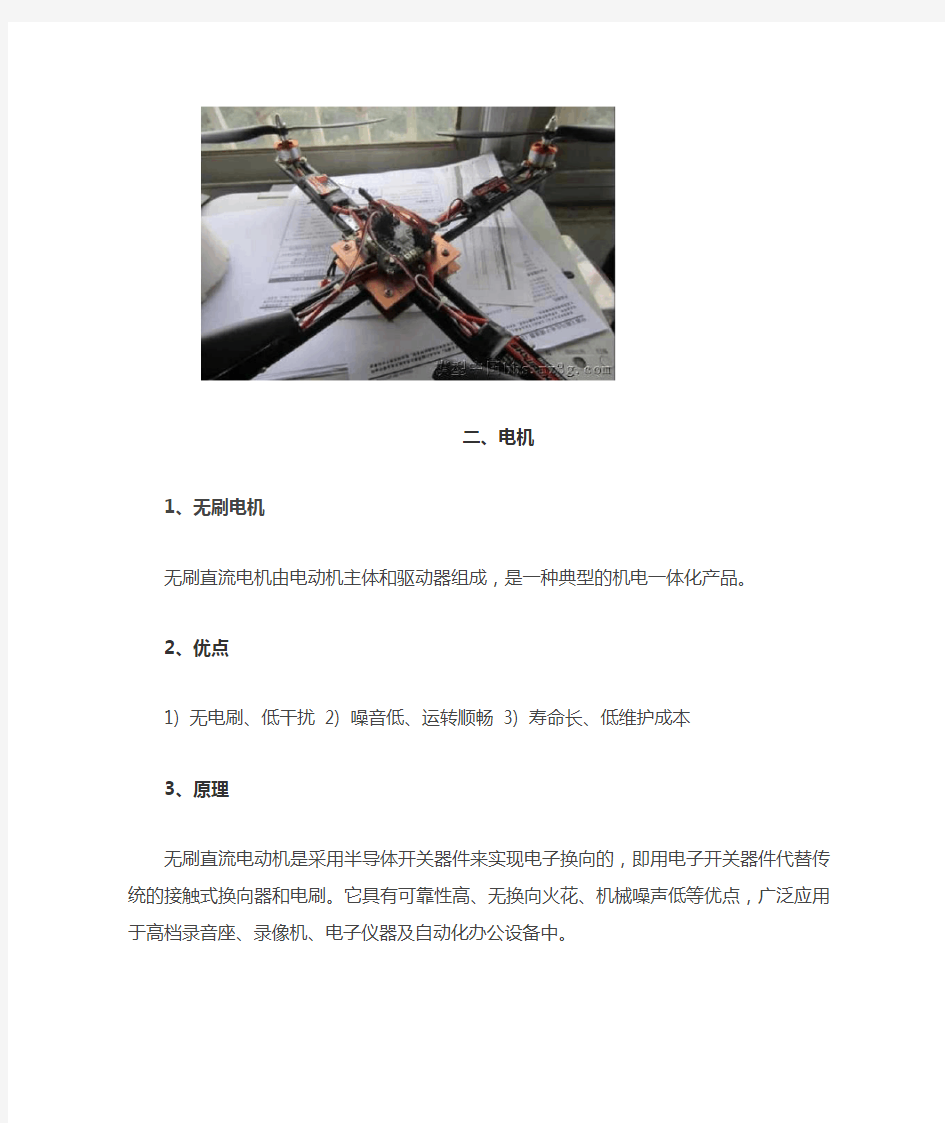
3、多旋翼成品图:
二、电机
1、无刷电机
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。
2、优点
1) 无电刷、低干扰2) 噪音低、运转顺畅3) 寿命长、低维护成本
3、原理
无刷直流电动机是采用半导体开关器件来实现电子换向的,即用电子开关器件代替传统的接触式换向器和电刷。它具有可靠性高、无换向火花、机械噪声低等优点,广泛应用于高档录音座、录像机、电子仪器及自动化办公设备中。
2、电机的型号含义?
2212电机,2018电机等等,不管什么牌子的电机,具体都要对应4位这类数字,其中前面2位是电机转子的直径,后面2位是电机转子的高度。注意,不是外壳哦。简单来说,前面2位越大,电机越肥,后面2位越大,电机越高。又高又大的电机,功率就更大,适合做大四轴。通常2212电机是最常见的配置。
4、什么是电机KV值?
每个无刷电机都会标准多少kv值,这个kv是外加1v电压对应的每分钟空转转速,例如:1000kv电机,外加1v电压,电机空转时每分钟转1000转,外加2v电压,电机空转
就2000转。
三、电子调速器
1、电子调速器
电子调速器是一个控制发电机转速的控制装置。它是根据接受的电信号,通过控制器和执行器来改变喷油泵供油量的大小。
2、为什么需要电调?
电调的作用就是将飞控板的控制信号,转变为电流的大小,以控制电机的转速。
因为电机的电流是很大的,通常每个电机正常工作时,平均有3a左右的电流,如果没有电调的存在,飞控板根本无法承受这样大的电流(另外也没驱动无刷电机的功能)。
同时电调在四轴当中还充当了电压变化器的作用,将11.1v的电压变为5v为飞控板和遥控器供电。
3、买多大的电调?
电调都会标上多少A,如20a,40a 这个数字就是电调能够提供的电流。大电流的电调可以兼容用在小电流的地方。小电流电调不能超标使用。
4、电调编程什么意思?
首先要说明电调是有很多功能模式的,选择这个功能就是对电调编程。
编程的途径可以直接将电调连接至遥控接收机的油门输出通道(通常是3通道),按说明书,在遥控器上通过搬动摇杆进行设置,这个方法比较麻烦,但节约。另外,还可以通过厂家的编程卡来进行设置(需要单独购买),方法简单,无需接遥控器。
为了保险,一定要将购买的电调设置一致,否则容易难于控制。如:电调的启动模式不一样,那么有些都转很快了,有些还很慢,这就有问题了。
注:通过遥控器进行设置电调,一定要接上电机,因为说明书上说的“滴滴”类的声音,是通过电机发出来的。
5、注意事项:
1) 选择电调一定要看该款电调的功率,另外要看电调与电机的兼容度。电调并不能兼容所有电机,它必须根据电机的功率等参数来进行选择。但实际情况是许多品牌的电调并不是足功率足电流,也许你需要60A的电调,它其实只能跑到55A就无法再往上调了,所以选择电调的时候一定要问清楚供应商是否足功率。选择低于电机功率的航模电调会导致电调上面功率管的烧坏。所以功率问题是航模电调选择的重要问题;
2) 因为四轴飞行要求,电调快速响应,而电调有快速响应和慢速响应的区别,所以四轴需要快速响应的电调。其实大多数常见电调是可以编程的,能通过编程来设置响应速度。6、电调的连接:
对于它们的连接,一般情况下是这样的:
1、电调的输入线与电池连接;
2、电调的输出线三根与电机连接(对调任意两根实现电机反转);
3、电调的信号线与接收机连接。
另外,电调一般有电源输出功能,即在信号线的正负极之间,有5V左右的电压输出,通过信号线为接收机供电,接收机再为舵机等控制设备供电。电调的输出为三~四个舵机供电是没问题的。因此,电动的飞机,一般都不需要单独为接收机供电,除非舵机很多或对接收机电源有很高的要求。
四、飞行控制板
1、飞控的用途?
现在的飞控都带有电子陀螺仪,磁罗盘,加速度计,气压计等传感器,在带有姿态稳定的模式下,通过软件算法,解析飞行器姿态,修正由于飞行器安装、外界干扰、零件之间的不一致等原因形成的姿态异常,帮助保持稳定状态。一些安装有GPS 的飞控可以在遥控失控等特殊情况下自动返回起飞点。例如,如发现右边力量大,向左倾斜,那么就减弱右边电流输出,电机变慢,升力变小,自然就不再向左倾斜。
2、飞控的种类:
1) mmc10(FF)、2) MWC、3) 玉兔、4) naza、5) kk,其中kk无自稳功能,多旋翼首选玉兔,功能强大,有超声波定高与气压定高,并且两种传感器是在2米的高度无缝切换的,定高的操作方法也非常方便,只需要打开定高开关,当油门不动时,就进入定高。现在兔二已支持10轴。
五、遥控器
1、什么是通道?
通道就是可以遥控器控制的动作路数,比如遥控器只能控制四轴上下飞,那么就是1个通道。但四轴在控制过程中需要控制的动作路数有:上下、左右、前后、旋转。所以对无人机遥控而言,一架典型的固定翼无人机会拥有四个最基本的RC功能:方向舵?升降舵?油门和副翼,这就需要四个通道来控制,一般是一通道控制副翼,二通道控制升降舵,三通道控制油门,四通道控制方向舵。同时,无人机遥控的通道数量没有严格的规定,它只是单纯地由飞机本身来决定。更复杂的无人机还会有收放起落架?襟翼(即第二副翼)?降落指示灯?降落伞以及相机等操作,这就需要更多的通道支持。
2、什么是日本手、美国手?
遥控器上油门的位置在右边是日本手、在左边是美国手,所谓遥控器油门,在四轴飞行器当中控制供电电流大小,电流大,电动机转得快,飞得高、力量大。反之同理。判断遥控器的油门很简单,遥控器2个摇杆当中,上下板动后不自动回到中间的那个就是油门摇杆。
六、电池和充电器
1、为什么要选锂电池?
同样电池容量锂电最轻,起飞效率最高。
2、电池的多少mah时什么意思?
表示电池容量,如1000mah电池,如果以1000ma放电,可持续放电1小时。如果以500mh放电,可以持续放电2小时。
3、电池后面的2s,3s,4s什么意思?
代表锂电池的节数,锂电池1节标准电压为3.7v,那么2s电池,就是代表有2个3.7v 电池在里面,电压为7.4v。
4、电池后面多少c是什么意思?
代表电池放电能力,这是普通锂电池和动力锂电池最重要区别,动力锂电池需要很大电流放电,这个放电能力就是C来表示的。如1000mah电池标准为5c,那么用5x1000mah,得出电池可以以5000mh的电流强度放电。这很重要,如果用低c的电池,大电流放电,电池会迅速损坏,甚至自燃。
5、多少c快充是什么意思?
这个与上面的c一样,只是将放电变成了充电,如1000mah电池,2c快充,就代表可以用2000ma的电流来充电。所以千万不要图快冒然用大电流,超过规定参数充电,电池很容易损坏。
6、平衡充电什么意思
如3s电池,内部是3个锂电池,因为制造工艺原因,没办法保证每个电池完全一致,充电放电特性都有差异,电池串联的情况下,就容易照常某些放电过度或充电过度,充电不饱满等,所以解决办法是分别对内部单节电池充电。动力锂电都有2组线,1组是输出线(2根),1组是单节锂电引出线(与s数有关),充电时按说明书,都插入充电器内,就可以进行平衡充电了。
七、螺旋桨
1、桨的型号含义?
桨也有啥1045,7040这些4位数字,前面2位代表桨的直径(单位:英寸 1英寸=254毫米)后面2位是桨的角度。
2、什么是正反桨,为什么需要它?
四轴飞行为了抵消螺旋桨的自旋,相隔的桨旋转方向是不一样的,所以需要正反桨。正反桨的风都向下吹。适合顺时针旋转的叫正浆、适合逆时针旋转的是反浆。安装的时候,一定记得无论正反桨,有字的一面是向上的(桨叶圆润的一面要和电机旋转方向一致)。3、电机与螺旋桨的搭配
搭配比较复杂,是具体情况而定,原理是一样的,如下:
1) 螺旋桨越大,升力就越大,但对应需要更大的力量来驱动;
2) 螺旋桨转速越高,升力越大;
3) 电机的kv越小,转动力量就越大;
4) 如果高kv带大桨,力量不够,那么就很困难,实际还是低俗运转,电机和电调很容易烧掉。
如果低kv带小桨,完全没有问题,但升力不够,可能造成无法起飞。
综上所述,大螺旋桨就需要用低kv电机,小螺旋桨就需要高kv电机。(因为需要用转速
来弥补升力不足)例如:常用1000kv电机,配10寸左右的桨。
八、航模新手100问
1.新手入门须知。
答:首先根据个人的爱好、动手能力、财力水平做一个自我评价,决定入手航模的方向,如固定翼、直机、多轴,固定翼入门较为简单,直机较难,多轴由于飞控与GPS增稳技术进步,在较高投入的情况下,个人技术要求也较低。航模飞机不同于玩具飞机,有较高危险性,请慎重对待
2.飞机能飞多高?
答:航模飞机的高度要根据其基本类型和使用的材质和动力综合决定,一般0-1000米都是没有问题,大致认为高度固定翼>多轴>直升机。
3.飞机可以飞多远?
答:飞机的飞行距离,主要由两个因素决定,自身的能源与可操纵的距离,一般0-20000米,但是大多数情况大家会在500米以内飞行,因为这个距离内才能看清飞机的姿态。4.飞机多少钱?
答:飞机多少钱,主要取决其使用的机身材质电子动力设备,一套不含接收机到手可飞的套机,以常见泡沫机(1-1.4米翼展),价格一般在300-800元;直升机(450级别),价格在1000-3000元;多轴(四轴450轴距),价格一般在600-5000元.
5.航模的动力类型?
答:常见动力组合一般是电动机驱动螺旋桨,以甲醇或者汽油或其他混合物为燃料的内燃机驱动螺旋桨,或者电动机驱动涵道风扇形成高速气流推进,或者发动机内燃烧增压形成高速热气流推进,小众还有使用橡皮筋动力,或者无动力滑翔。
6.模拟器是什么?
答:模拟器是一个软件程序,软件会模拟现实中的航模操作与场地环境,飞机操作控制,从而可以从中掌握基本的飞行操作,例如油门响应大小,舵面反应,飞机姿态响应等等,常用的模拟器,一般有PhoenixRC(俗称凤凰)、RealFlight G4.(俗称G4)、Reflex XTR、FlyingModel Simulation,日常网上叫卖的模拟器就是这种,一般带一张光盘和一个加密狗(模拟器软件有保密措施,需要使用加密狗解密,类似优盘形状)。
7.遥控器与接收机是什么?
答:航模飞机上天,需要一个设备能控制,这个设备就是遥控器,对应的飞机上需要有一个设备能接收遥控器传来的指令,这个设备就是接收机。遥控器与接收机之间通过无线电波进行连接通讯,常用的无线电频率是72Mhz与2.4Ghz。遥控器可以进行一些飞行参数的设置,例如:油门的正反,摇杆灵敏度大小,舵机的中立位置调整,通道的功能定义,飞机时间记录与提醒,拨杆功能设定,高级功能有航模回传的电池电压电流数据等等。
8.遥控器通道定义与需求?
答:遥控器都会有几路通道控制,俗称几通,如常见的天地飞6,就是六通道。
一架航模飞机,其中有一些部件是需要人为通过遥控器控制的。例如动力大小控制,俗称油门,升降舵,方向舵、副翼,襟翼,起落架,拉烟器,灯光等等,每一个项目需要一个单独的通道进行控制,但是有些项目控制需要很精确且为无级操作,如油门,升降,方向,副翼,有些项目控制固定为几档操作,如襟翼,起落架,灯光,,针对以上遥控器上分别有摇杆与拨杆进行定义如对油门、升降、方向、副翼使用摇杆进行操作,对襟翼,起落架,灯光等使用拨杆进行操作。
9.日本手与美国手区别与定义?
答:因为航模活动较早开展的地区在日本与北美地区,因此这两个地区,对控制器中的两个
摇杆四个通道的功能定义有不同。如日本手,左摇杆:上下升降舵,左右为方向舵;右摇杆:上下为油门舵,左右是副翼舵。美国手,左摇杆:上下为油门舵,左右方向舵
右摇杆:上下为升降舵,左右为副翼舵。这个主要根据个人喜好,就像是开车,有左舵车,主要中国大陆与北美地区,右舵车,主要英联邦国家和一些地区,如英国与中国香港地区。从理论安全角度来说,北半球,左舵车要好些,但是更多的主要还是习惯的养成的问题。美国手与日本手的优劣势,通常是在一些超高难度动作的操作中,才有操作速度上的差异,通常大家,固定翼用日本手较多,直升机用美国手较多。
10.遥控器的选择与品牌?
答:遥控器为进口与国产品牌,国产有天地飞、华科尔、福斯,进口有Futaba(日本)、JR(日本)、ROBBE(德国)、Graupner(德国),早期国内电子水平基础较差,控的质量一般,现在国产控质量也相当稳定,性价比很高,遥控器主要追求实用稳定,不宜过分追求高级配置,国产以天地飞,天六天九中文界面操作简单,价格实惠,配套的接收机也便宜,一套遥控与接收机可不超过1000元,选择Futaba T8FG 14SG , JR 9X XG7XG11 ,价格一套起步1500以上,且接收机昂贵。新手入航模可天地飞六起步,后续根据所玩飞机的需要再进行升级,通常固定翼飞机,直升机,大多数只需要六通道就可以控制,甚至早期四通道即可,即油门、副翼、升降、方向。
11.航模飞机类型?
答:航模爱好者常玩的飞机种类,按旋翼分固定翼,直升机,多轴三类,还有诸如特技、3D、航拍、FPV,专业的有国际航联FAI SPORTING CODE 对航空运动比赛作出了代码分类,具体分为17个CLASS级别,每个CLASS级别有各自DISCIPLINES分类,遥控特技飞行被列入第[F] 级别[3A] 分类,即所谓F3A,F3A只是一个名称而已,或者是说:它是所属在FAI底下的一个次级委员会的名称。它规范了一套遥控模型特技飞行的相关规定,
如模型机机身大小、发动机音量限制、机重限制......等等。这个委员会每隔两年会委派一个国家承办世界性的竞赛,就是国人所谓的世界杯。除此之外,FAI对于各个特技动作也有详细的定义,明白地用文字叙述和图形说明来阐述各特技动作的现象和评分标准
12.飞机电动与油动的优缺点?
答:由于电池本身能量密度不足,有刷电机效率较低,导致航模早期以甲醇或者汽油机为主,随着锂电无刷电机电调技术进步,在动力,能量密度上,电动机已经不逊色油机,同时油机对地面调机启动要求技术较高,地面维护工作较多,且比较脏乱,电动机结构简单,干净免维护。电动航模飞机由于使用电动机,需要购置相对应的充电器与电池作为飞机动力。目前航模新人基本都建议入电动。
13.常说50CC 120CC是何意思?
答:此种说法是指发动机的汽缸容积为50毫升、120毫升,通常也类比为发动机的功率大小或者飞机大小,由于飞机对重量要求较为苛刻,基本多大飞机配置多大的发动机。一般50CC的固定翼翼展即有2.4米
14.甲醇与汽油机?
答:都属于内燃机范畴,但是甲醇机与柴油机类似是两冲程,费油拉力大噪音大,汽油机是四冲程,省油噪音小拉力稍小。
15.航模发动机(内燃机)品牌
答:三叶(国产)、OS、京商KELLY、小松、YS.
16. 有刷电机?
答:有刷电机有定子和转子两大部分组成,定子上有磁极(绕组式或永磁式),转子有绕组,通电后,转子上也形成磁场(磁极),定子和转子的磁极之间有一个夹角,在定转子磁场(N 极和S极之间)的相互吸引下,使电机旋转。改变电刷的位置,就可以改变定转子磁极夹
角(假设以定子的磁极为夹角起始边,转子的磁极为另一边,由转子的磁极指向定子的磁极的方向就是电机的旋转方向)的方向,从而改变电机的旋转方向磁钢。这个有刷就是指电刷,也称碳刷。缺点耗电,碳刷磨损,笨重,寿命短。
17.无刷电机:
答:无刷电机也是有转子与定子,无刷电机的转子是永磁磁钢,连同外壳一起和输出轴相连,定子是绕组线圈,去掉了有刷电机用来交替变换电磁场的换向电刷,故称之为无刷电机,依靠改变输入到无刷电机定子线圈上的电流波交变频率和波形,在绕组线圈周围形成一个绕电机几何轴心旋转的磁场,这个磁场驱动转子上的永磁磁钢转动,电机就转起来了,电机的性能和磁钢数量、磁钢磁通强度、电机输入电压大小等因素有关,更与无刷电机的控制性能有很大关系,因为输入的是直流电,电流需要电子调速器将其变成3相交流电,还需要从遥控器接收机那里接收控制信号,控制电机的转速,以满足模型使用需要。总的来说,无刷电机的结构是比较简单的,真正决定其使用性能的还是无刷电子调速器,俗称电调。优点:寿命长,省电,后期维护方便,不用更换碳刷。
18.电调是什么?
答:无刷电机由于取消了碳刷结构,需要能替代碳功能的部件,这个就是电调,电调负责将直流电,转换为三相电,并根据需要控制其电压电流大小,从而驱动无刷电机实现需要的转速输出。
19.电调的品牌?
答:好盈,花牌、凤凰、中特威,推荐好盈。
20.电调的XXA?
答:电调常说的XXA,指的是电调可稳定调整输出的电流为多少,如60A.即最大可稳定输出60A安培电流。切勿超标准使用,会导致电调烧毁。
21..电动机的品牌?
答:常用的有,朗宇、新西达、亚拓、蝎子、浩马特、花牌、银燕;一般固定翼用朗宇较多,新西达(便宜)次之,直升机用亚拓、蝎子(太贵)次之
22.电机的型号?
答:电机型号,每个厂家都有自己的编号规则,主要有KV值,电机编码。以朗宇电机,常规如无刷电机的型号2212 2217 2208 22指电机直径12 17 08 指电机机身长度体积2216 2212 2216动力就强于2212,具体数值可参考朗宇官方数据
23.KV值?
答:指加一伏电压,电机转速增加多少,KV2000即指电压在10伏的时候,电机每分钟空转转速是20000转。这个参数的意义是:能够帮助你判断这个马达的特性,KV高马达就暴力,内阻小,电流大,功率高,转速快或者说相同电压下爆发出来的功率高拥有很好的极限转速,但是受到电机自身的设计与材料限制,会有一个功率上限,一般说KV高的配小的高速桨,KV低的配大的低速桨,这个与开车有点类似,车感觉劲道最足的时候往往转速比较低。
24.航模直升机与玩具遥控飞机为何价格与操控差异这么大?
答:遥控玩具飞机所说的几通道指的是,控制飞机前进,后退,上下方向,无法多指令组合进行精确操控,只能控制飞机上下左右简单飞行;而航模遥控直升飞机,所说的通道指的是直接控制指令的通道数。各个通道直接控制对应的舵机,通过操作组合,可以控制飞机做出复杂的特技动作。以相机来举例,玩具遥控飞机,就如同傻瓜相机,镜头、光圈、观光度等等参数,相机本身都帮你设定好了,无法让你去更换更好的镜头,调整细节的光圈,感光度等等,你只需要按快门简单对焦即可,而航模直升机,就像是单反相机,镜头你可以自由更换组合,光圈你也可以手动调整,感光度也可以,可以拍出你需要的效果。航模直升机,通
过练习,可以完成在电视中见到的翻筋斗动作,而遥控玩具飞机,如何练习都只能简单的前进后推升降动作。
24.航模直升机的100级250级450级500级800级?
答:这个级别一般是用来定义飞机的大小,是以直升机主轴到尾轴的距离(主要见亚拓系列)。也有公司以主旋翼的尺寸来分级。以亚拓450S为例,就是450级别,使用的大桨是325MM, 而亚拓450L,就是480级,使用的是360MM的大桨。450级机身长约65厘米,600级机身长约1.10米,700级飞机机身约1.35米
25.飞机的材质?
答:飞机主要由机身承载结构,与动力电子设备构成。飞机机身承载常用的材料分为发泡类,塑料,铜铁铝,碳纤维,尼龙,木材,玻璃钢等。由于飞机对重量的要求极为严格,为了减少机身的重量,机身往往采取泡沫材料辅以碳纤维杆加强,,或者是轻木框架结构外层蒙皮内空的方式,也有采取KT板与碳杆合体等直接非像真机身方式。就像是风筝的制作,除了坚韧的纸结也必须有支撑用的足够强度的竹条作为骨架将纸撑开成形。就像是一把枪,早期基本都是全金属结构(90%以上),现在很多枪上面的金属部件比例都低于50%,同时如撞针等高受力部位依旧采取金属材质,但你能说现在的枪就不如以前好吗?
26.航模飞机的操作如何实现?
答:航模飞机的操作基本是通过手中的遥控器来实现,操作遥控器上面的摇杆与拨杆,通过遥控器的发射机将对应操作的信号发射出去,飞机上的接收机接收到相应信号,再转化成指令传递给对应的舵机动作,从而让对应的舵面按照需要运动。舵面运动影响气流的流动,带动飞机做出相应的反应。
27.舵机的功能?
答:舵机可理解为一个精确控制的电机,分为模拟舵机和数码舵机,它的功能就是用来执行
具体的舵面变化从而改变气流的变化,是我们操控飞机时候实际会动作的部件,就像是船航行的时候当我们需要改变方向的时候,我们就会操作船舵,从而让水流产生变化,进而让船方向改变。选择舵机,舵机有扭力大小,反应速度,自重等等主要根据飞机对舵面的需求决定,因为飞机在告诉飞行的时候,舵面会受到风的作用,会受到风的压力,所以需要选择不同舵机配合使用,如一架全重1.5KG不到的1.2米冲浪者泡沫机与自重超过3KG的轻木50E 级航模飞机,使用的舵机肯定不能一样的。一般说9克12克,都是指的自重,一般都是模拟舵机. 一般通过扭矩来测量舵机的力量,单位是盎司/英寸或kg/ cm。扭力表示在制定距离内,从转轴那能输出多大的转动力。如1.6kg/cm的舵机,能在25px距离外拉动1.6kg 的东西。离转轴越远,扭矩越小,例如,到了50px外,只能拉动0.8kg的东西。另一个相关度量量是舵机转速,表示舵机能以多快的速度转动(如在十分之一秒内转过60度)。28.模拟舵机与数码舵机?
答:模拟舵机和数字比例舵机(或称之为标准舵机)的电子电路中无MCU微控制器,一般都称之为模拟舵机。数字比例舵机是模拟舵机最好的类型,数码舵机电子电路中带MCU微控制器故俗称为数码舵机,数码舵机凭借比之模拟舵机具有反应速度更快,无反应区范围小,定位精度高,抗干扰能力强。一般固定翼泡沫机等要求精度反应不高的飞机,如冲浪者、塞斯纳9克的模拟舵机就足够使用,而如直升机使用的斜盘与锁尾舵机要求反应速度与精度很高,都需使用较好的数码舵机。
29.模拟舵机与数码舵机比,为何速度不如数码舵机?
答:不管是模拟还是数码舵机,在负载转矩不变时,电机转速取决于驱动信号占空比大小而与频率无关。数码舵机可接收更高频率的PWM外部控制信号,可在更短的周期时间后获得位置信息,对舵机摇臂位置做最新调整。所以说数码舵机的反应速度比模拟舵机快,而不是驱动电机转速比模拟舵机快。
30.舵机通电后为何会吱吱的响
答:舵机老发出吱吱的来回定位调整响声,是由于有的舵机无滞环调节功能,控制死区范围调得小,只要输入信号和反馈信号老是波动,它们的差值超出控制死区,舵机就发出信号驱动电机。另没有滞环调节功能,如果舵机齿轮组机械精度差,齿虚位大,带动反馈电位器的旋转步,步范围就已超出控制死区范围,那舵机必将调整不停,吱吱不停。
31.舵机的价格为何差异这么大?
答:舵机的基本结构是这样,但实现起来有很多种。例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有***和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。例如,其中小舵机一般称作微舵,同种材料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需要根据需要选用不同类型。舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而不是中间,需要辨认。但记住红色为电源,黑色为地线,一般不会搞错。
32..直升机飞机为何要用一个大齿盘,大齿盘为何要用塑料材质?
答:由于直升机使用电机是高KV值的高速电机,通过大齿盘后,降低轴转动速度而对应驱动扭力可以增加,从动齿轮齿数比上主动齿轮齿数就是齿轮比,小于1就是提高轴速度降低扭力,大于1就是降低轴速度提升生扭力,例如变速自行车,当我们从后轮中较大的齿轮变成小齿轮的同时,力度是增加还是减小,就是一种反向应用。使用塑料材质,一是保护电机避免次生损坏,二是减少重量。
33.直升机上金属越多越好吗?:
答:直升机上面并非都是金属件,才飞行稳定耐摔,因为直升机结构比较复杂,一架450级别的直升机的各式零件达上百件,这些零件组合成一架飞机,金属的优点是结实延展性好,但是现在很多如碳纤维,尼龙塑料在一些特性上都超过了金属件。而且由于金属件的延展性比较好,当出现炸鸡的时候,金属件会吸收部分能量,从而产生细微形变,从而导致问题隐患较难发现,这也是很多炸过的直升飞机越来越难飞的原因之一。所以全金属的飞机并不是最好的飞机,就像是汽车,一般保险杠以及一些容易磕碰的位置都不会使用金属,道理是一样的。
34.直升机的主旋翼桨的材质?
答:航模直升机的桨,一般主要有木桨、玻纤、碳纤维三种。
35. 航模电池的选择?
答:使用电动机的航模飞机,动力电池的选择,需要根据机身的大小购买,忌讳买过大,大容量的电池用在小机身,由于电池过重,会影响电机推进的效率,滞空时间反而不长。
举个经典的例子:我国导弹研制初期,射程未达目标,这时候王永志院士,提出减少燃料加注数量的方式来解决,大家都无法理解,后来在钱学森的支持下,东风二号改,通过减少600公斤燃料,射程反而达到标准。
36. 航模电池的参数有那么些?
答:航模电池,一般的参数有电压,放电倍率,充电倍率,容量,内阻。以常规3S 2200mAh 25C放电5C充电,3S(S串联)代表这个就是3个电芯串联起来的电池,单个电芯正常起点电压是3.7V,充满截至电压为4.2V,这个电池就是11.1伏起电压,充满就是12.6伏,容量就是2200mAh,25C放电,表示这个航模电池可以以25*2200mA=55A最大电流放电。5C充电就是5*2200mA=11A最大电流充电。常用品牌:花牌、富力、格式、赤道、
达普。
37.电池C数是什么?
答:电池的C数目,可以这样理解,以3S 2200毫安电池为例,1C放电就是一个小时把这个电池从4.2v放到3.7v的电量,大致就是以11A电流放电一小时,5C即是以55A电流放电,大致十分钟就放完一个电池了。如普通航模电池的放电倍数,即10C起步,至50C 不等,航模使用的是特殊工艺的聚合物电芯与普通手机和移动电源使用的聚合物电芯是不同,不能混用。
38.航模电池保存电压?
答:航模电池由于工艺特殊,所以通常是在使用前几个小时才充满电,当不使用的时候放电至3.8至3.9伏保存,切忌过低或者过高电压状态下保存电池,以延长使用寿命与维持有效容量。常规的锂电如手机电池移动电源,均带有保护电路板,从而具有防止过放,过冲,短路,但是航模动力电池,没有保护电路板,所以很容易过放过充短路,发生危险甚至爆炸。
39.螺旋桨安装方向?
答:一般将螺旋桨上印有规格字样(6*4)的一面向前,可简单感受下风力,螺旋桨产生风总是从机头吹向机尾,同时注意电机转向是否正常,如反向,将电机上的三根线任意两根对调一下即可。
40.飞机起飞风向?
答:固定翼航模飞机起飞,一般是逆风起飞,小型飞机抗风能力较差,4级以上阵风建议暂停飞行。
41.空机是什么意思?
答:空机就是只有机身结构部件,不含电子设备如电调电机舵机等电装的飞机。42."PNP"版本是什么意思?
2017-10-08 GaryLiu 于四川绵阳 无人机的飞行控制是无人机研究领域主要问题之一。在飞行过程中会受到各种干扰,如传感器的噪音与漂移、强风与乱气流、载重量变化及倾角过大引起的模型变动等等。这些都会严重影响飞行器的飞行品质,因此无人机的控制技术便显得尤为重要。传统的控制方法主要集中于姿态和高度的控制,除此之外还有一些用来控制速度、位置、航向、3D轨迹跟踪控制。多旋翼无人机的控制方法可以总结为以下三个主要的方面。 1.线性飞行控制方法 常规的飞行器控制方法以及早期的对飞行器控制的尝试都是建立在线性飞行控制理论上的,这其中就有诸如PID、H∞、LQR以及增益调度法。 1)PID PID控制属于传统控制方法,是目前最成功、用的最广泛的控制方法之一。其控制方法简单,无需前期建模工作,参数物理意义明确,适用于飞行精度要求不高的控制。 2)H∞ H∞属于鲁棒控制的方法。经典的控制理论并不要求被控对象的精确数学模型来解决多输入多输出非线性系统问题。现代控制理论可以定量地解决多输入多输出非线性系统问题,但完全依赖于描述被控对象的动态特性的数学模型。鲁棒控制可以很好解决因干扰等因素引起的建模误差问题,但它的计算量非常大,依赖于高性能的处理器,同时,由于是频域设计方法,调参也相对困难。 3)LQR LQR是被运用来控制无人机的比较成功的方法之一,其对象是能用状态空间表达式表示的线性系统,目标函数是状态变量或控制变量的二次函数的积分。而且Matlab软件的使用为LQR的控制方法提供了良好的仿真条件,更为工程实现提供了便利。 4)增益调度法 增益调度(Gain scheduling)即在系统运行时,调度变量的变化导致控制器的参数随着改变,根据调度变量使系统以不同的控制规律在不同的区域内运行,以解决系统非线性的问题。该算法由两大部分组成,第一部分主要完成事件驱动,实现参数调整。如果系统的运行情况改变,则可通过该部分来识别并切换模态;第二部分为误差驱动,其控制功能由选定的模态来实现。该控制方法在旋翼无人机的垂直起降、定点悬停及路径跟踪等控制上有着优异的性能。 2.基于学习的飞行控制方法 基于学习的飞行控制方法的特点就是无需了解飞行器的动力学模型,只要一些飞行试验和飞行数据。其中研究最热门的有模糊控制方法、基于人体学习的方法以及神经网络法。 1)模糊控制方法(Fuzzy logic) 模糊控制是解决模型不确定性的方法之一,在模型未知的情况下来实现对无人机的控制。 2)基于人体学习的方法(Human-based learning) 美国MIT的科研人员为了寻找能更好地控制小型无人飞行器的控制方法,从参加军事演习进行特技飞行的飞机中采集数据,分析飞行员对不同情况下飞机的操作,从而更好地理解无人机的输入序列和反馈机制。这种方法已经被运用到小型无人机的自主飞行中。 3)神经网络法(Neural networks)
无人机管控现状总结及 建议 Company number:【0089WT-8898YT-W8CCB-BUUT-202108】
无人机管控现状全国空中交通管制二十四个分区:空军二十(4+4+3+4+5),海军四个。 五个战区、一个海军: 1、北部战区:长春、沈阳、大连、济南; 2、中部战区:北京、大同、西安、武汉; 3、南部战区:广州、南宁、昆明; 4、东部战区:上海、南京、福州、漳州; 5、西部战区:成都、乌鲁木齐、拉萨、兰州、鼎新; 6、海军:海口、宁波、山海关、青岛。 截至八月初,不完全统计,目前,四川、重庆、福建、云南、北京、天津、河北、新疆、广东、吉林、江苏、陕西等12个省市区陆续出台无人机相关的禁飞、限飞命令或通告;另外有深圳、石家庄、月牙泉、武汉、黄山、大连、柳州、扬州泰州、桂林、泉州、东莞、齐齐哈尔、无锡等十余个城市也在行者区域内禁限飞,或者在机场周边划出了大面积的净空保护区。 对于无人机申报管理有相当完善的政策与登记系统的省市区有: 香港特别行政区、澳门特别行政区; 有具体政策出台,各相关部门分工明确的省市区有: 江苏省、广东省、江西省、重庆市、四川省、陕西省和黑龙江省; 通过多方面咨询能了解大概流程,但没有明确政策,各部门没有明确分工的省市区有:北京市、天津市、上海市、浙江省、河南省、河北省、吉林省、宁夏回族自治区、辽宁省、甘肃省、山东省、安徽省、福建省、广西壮族自治区、海南省、湖北省、内蒙古自治区、新疆维吾尔自治区、贵州省和西藏自治区;
暂时没有相关管理规定或无从得知相关信息的省市区有: 湖南省、青海省、台湾省、云南省和山西省。 全国 2017年1月至6月,全国发生了10余起航班备降或返航,影响旅客万余人。深圳、南京尤甚。 ●全国首批155个民航机场的禁飞区确立。 ●国家民航局发布《民用无人驾驶航空器实名制登记管理规定》。 6月1日 起,对质量在250克以上的无人机实施注册登记。(基本上是个能飞的就比这个重吧微笑脸) 由于相关规定各省比较类似,仅列举几个出台明确规定的(仅摘录不是全部)。 6月陕西(中部战区) ●在陕西省范围内开展无人驾驶航空器飞行活动,应当飞行前一天15时前向 94188部队航空管制部门或民航空中管制部门提出申请,经批准后方可实施。 ●飞行计划申请单位(个人)应在组织飞行前2小时向申报飞行计划的航空管 制部门提出联系放飞事宜、经批准后方可组织飞行。组织飞行的单位(个人)要将航空器的起飞、降落时刻及时通报航管部门。 ●无人驾驶航空器飞行的计划申请内容包括:单位、航空器型号、架数、使用 的机场或临时起降点、任务性质、飞行区域、飞行高度、飞行日期、预计开始和结束时刻及现场人员联系方式等。 ●针对违规飞行行为将依照《中华人民共和国民用航空法》、《中华人民共和
监管场所无人机系统 建设方案 北京创羿兴晟科技发展有限公司 2018.9
目录 目录 目录 (1) 一、概述 (2) 1.1、背景 (2) 1.2、应用 (2) 1.3、方案依据标准规范 (4) 二、系统介绍 (5) 2.1、系统功能 (5) 2.2、功能及产品介绍 (6) 2.2.1、六旋翼无人机主机 (6) 2.2.2、航拍摄像 (13) 2.2.3、空中抛投 (27) 2.2.4、通信中继 ............................................................................................ 错误!未定义书签。 2.3、无人机综合管控指挥平台 (31) 2.3.1、平台内容 (32) 2.3.2、软件架构 (33) 2.3.3、通信架构 (33) 2.3.4、客户端界面 (34)
一、概述 1.1、背景 无人机产业发展至今,已经成长为了一个完整的体系,在这个体系之下,无人机从功能上细分到了各个领域,除了航拍、植保等功用之外,无人机也在勘察、安检等领域拥有不错的发挥,其中安全巡逻无人机已经成为无人机市场中的一匹迅速崛起的黑马,并且还在不断地快速成长。运用高科技手段对监狱工作提供技术支持已刻不容缓。作为高度戒备监狱,监狱押犯规模大、在押罪犯刑期长、犯群结构复杂,为积极整合资源、推动高新技术应用、完善综合保障机制、增强突发事件应对能力。 无人机可完成包括巡航、实时监控、取证拍摄等一体化飞行及监控任务,并能将高清视频或高像素照片实时传输到执法终端。今后,它不仅会用于监管设施及周边区域的隐患排查,维护监管安全,为监狱指挥中心作出实时部署提供第一手资料;它还对开展隐蔽督察、视频督察、掌握狱情灾情和处置突发事件发挥重要作用。
1、首先介绍的是无人机的大脑——飞控 无人机飞行控制系统是指能够稳定无人机飞行姿态,并能控制无人机自主或半自主飞行的控制系统,是无人机的大脑,也是区别于航模的最主要标志,简称飞控。飞控的作用就是通过飞控板上的陀螺仪,对四轴飞行状态进行快速调整(都是瞬间的事,不要妄想用人肉完成)。如发现右边力量大,向左倾斜,那么就减弱右边电流输出,电机变慢、升力变小,自然就不再向左倾斜。如果没有飞控系统,四轴飞行器就会因为安装、外界干扰、零件之间的不一致等原因形成飞行力量不平衡,后果就是左右、上下地胡乱翻滚,根本无法飞行。 工作过程大致如下:飞控系统实时采集各传感器测量的飞行状态数据、接收无线电测控终端传输的由地面测控站上行信道送来的控制命令及数据,经计算处理,输出控制指令给执行机构,实现对无人机中各种飞行模态的控制和对任务设备的管理与控制;同时将无人机的状态数据及发动机、机载电源系统、任务设备的工作状态参数实时传送给机载无线电数据终端,经无线电下行信道发送回地面测控站。飞控系统的硬件主要包括:主控制模块、信号调理及接口模块、数据采集模块以及舵机驱动模块等。 2、为传感器增稳的——云台 稳定平台,对于任务设备来说太重要了,是用来给相机增稳的部分,几千米的高度上误差个几分几秒就能差出去几十米。它主要通过传感器感知机身的动作,通过电机驱动让相机保持原来的位置,抵消机身晃动或者震动的影响。云台主要考察几个性能:增稳精度、兼容性(一款云台能适配几款相机和镜头)和转动范围(分为俯仰、横滚和旋转三个轴),如果遇到变焦相机,就更加考验云台
的增稳精度了,因为经过长距离的变焦,一点点轻微的震动都会让画面抖动得很厉害。 现时的航拍云台主要由无刷电机驱动,在水平、横滚、俯仰三个轴向对相机进行增稳,可搭载的摄影器材从小摄像头到GoPro,再到微单/无反相机,甚至全画幅单反以及专业级电影机都可以。摄影器材越大,云台就越大,相应的机架也就越大。 上面三个演示的是机身不动、相机动的效果,但实际上云台工作时,是相机不动,而机身动。所以在空中时,无人机的机身不断在动作,云台依然可以保相机镜头的位置,达到增稳的效果。 分类: 目前市面上常见的有三轴增稳云台和两轴增稳云台。
南京航空航天大学 硕士学位论文 小型固定翼无人机飞行控制软件设计与开发 姓名:李俊 申请学位级别:硕士 专业:精密仪器及机械 指导教师:李春涛 2011-03
南京航空航天大学硕士学位论文 摘要 随着无人机在众多领域开展的广泛应用,对其提出的要求也越来越高,作为“大脑”的飞行控制系统也越来越受到重视。飞行控制软件是无人机飞行控制系统的重要组成部分,其性能直接关系到无人机的飞行安全。因此在飞行控制软件的设计中既要满足基本的飞行功能,又要提高软件本身的安全性能。本课题正是在这个研究背景和实际工程的需求下提出的。 首先,论文采用模块化思想设计开发了一种小型固定翼无人机飞行控制软件,在使整个软件可维护和可扩展的同时,针对软件多任务动态运行、内存保护等要求,设计了数据区轮换读写机制及软件看门狗,解决了多任务对内存读写冲突的问题,保障了飞行控制软件运行的可靠性。 其次,结合飞行控制计算机的资源配置,完成了目标硬件的初始化、串口驱动、脉宽调制接口驱动、模拟量驱动和离散量驱动软件设计与开发。完成底层驱动环境开发后,对飞行控制软件进行了任务划分和优先级分配。在综合考虑飞行控制软件性能和功能需求的基础上,设计开发了传感器采集、控制律解算、遥控遥测和导航制导等9个任务,实现了自主导航、指令导航和人工导航三种飞行模态,并通过事件触发的方式对多任务进行调度管理,实现了不同飞行模态间的平滑切换。 再次,针对机载设备的配置情况,设计了传感器信息源故障和测控系统链路故障的处理逻辑。给出了传感器的通信状态、数据安全范围和测控系统链路等故障诊断机制,设计了传感器高度信息源、定位信息源、测控链路等故障处置逻辑,确保了无人机的空中安全飞行。 最后,在实时仿真环境下,对飞行控制软件进行了半物理飞行仿真验证,测试了传感器故障和测控链路故障逻辑,仿真结果表明本文所设计的软件满足了小型固定翼无人机飞行控制的需求。 关键词:飞行控制软件,小型固定翼无人机,模块化,安全可靠,故障处理
无人机飞行路线控制系统设计 由于无人机是通过无线遥控的方式完成自动飞行和执行各种任务,具有安全零伤亡、低能耗、重复利用率高、控制方便等优点,因此得到了各个国家、各行各业的高度重视和广泛应用。尤其以美国为代表,无论是在军事、民用、环境保护还是科学研究中,都将无人机的使用发挥到淋漓尽致,其拥有全球最先进的“捕食者”和“全球鹰”战斗无人机、监测鸟类的“大乌鸦”无人机、民用用途的“伊哈纳”无人机等等。我国在无人机研制方面也取得了一定的成就,拥有技术卓越的“翔龙”和“暗箭”高空高速无人侦查机、多用途的“黔中”无人机、探测海洋的“天骄”无人机、中继通讯的“蜜蜂”无人机等等。在未来,随着现代化工业技术、信息技术、自动化技术、航天技术等高新技术的迅速发展,无人机技术将日趋成熟,性能日益完善,为此将拥有更为广阔的应用前景。为确保无人机能够有效地完成各种飞行任务,研发者开发了各种技术方式的飞行控制系统,完成对无人机的起飞、飞行控制、着陆以及相应目标任务等操作的控制。飞行路线控制是飞行控制系统中最基础也是最核心的功能控制部分,其它所有的飞行任务控制都是飞行路线控制的基础之上实现。目前对于无人机飞行路线的控制已有各种各样方式的系统,但大多数系统都存在一定缺陷,如有些系统操作过于繁杂,不够智能化;有些系统只能在视距范围遥 控无人机,严重限制了无人机的使用;有些系统过于专用化,不能适用于大多数类型的无人机;有些比较完善的系统,造价又过于昂贵,等等一系列问题。针对以上存在的这些问题,本课题提出了一种成本低、
遥控距离远、智能化、高效化、适用性广的无人机飞行路线控制系统设计方案。该系统方案包括两大部分,一部分是操作人员所处的地面监控系统,一部分是无人机端的受控系统,实现的机制主要是无人机不断地将自身的定位信息实时地传送给地面控制系统,地面控制系统将无人机位置信息通过电子地图可视化显示给操作人员,操作人员结合本次飞行任务,采用灵活的鼠标绘制方式在地图上绘制预定的飞行路线,地面控制系统对绘制路线进行自动处理生成可用的路线控制信息帧并发送给无人机受控系统,无人机受控系统接收到位置控制信息帧,不断结合实时的方位信息得到飞行控制信息,从而遥控无人机按照预定路线飞行。此外,为方便用户以后对历史数据的查看,以分析总结得到一些有价值的信息,地面监控系统还包含了对预定路线和无人机历史飞行路线的存储、查询和在地图中回放功能。基于GIS技术的地面监控系统的具体实现是在Windows操作系统上,采用Visual Basic作为系统开发环境并结合MSComm串口通信技术、Mapx二次开发组件技术、Winsock网络接口技术以及Access数据库技术完成软件设计,实现与无人机受控系统的无线通信、GIS系统操作和监控、历史数据存储和重现等,其中实验区域的电子地图采用Mapinfo Professional开发软件绘制完成,并创新性地设计并绘制了画面简洁的带高层信息的二点三维矢量地图,而对于绘制路线的优化和提取处理采用了垂距比值法和最小R值法。无人机端使用BDS-2/GPS双卫星系统对无人机实时位置进行高精度的定位,采用双串口单片机进行运算控制处理,实时的飞行控制信息采用了几何空间算法得到,另外采
“知天知地”是古今中外兵家作战的原则。在现代作战中称之为“战场空间认知”或“战场空间感知”(Battle space awareness)。获得对战场的正确认识是一种作战能力,但前提是必须为指参人员提供足够的信息和数据,才能作出正确的判断。仅仅“知天感地”还不够,还要尽快掌握敌我态势才能作出决策,定下决心。这就是孙子早就说过的“知己知彼”。目前,单靠卫星和有人侦察机是无法快速、及时和全方位地获取战场信息的。无人机遥感正是能够满足这一需求的有效补充手段。目前,各类无人机已成为美军收集情报、捕获目标和分析打击效果的不可缺少的途径。在经历了无人靶机、预编程序控制无人侦察机、指令遥控无人侦察机和复合控制的多用途无人机等发展阶段后,无人机的技术已逐渐成熟、性能日臻完善,并在几次局部战争中经历了实战的考验。无人机的作用、地位及其潜在的军事价值得到了广泛的认可,并为其迅速发展提供了强大的动力。 但是,无人机成像范围是由事先规划的航迹范围所决定的,即使可以航线实时上传以及多次补充飞行,仍存在视野有限、监测范围小、调整灵活性不够的缺点。严重制约了无人飞行器执行监测任务的效能。在高度一定的约束条件下,如何使无人飞行器既“看得广”又“看得清”,实现从地平线到地平线的超宽视场、大范围的空中监测和战场感知,空中全景监测技术是一种有效的技术途径。本文建立了一种无人机机载全景监测系统,实现了空中全景监测。 1实现空中全景监测需要的条件 1)需要一个以正下方为主视场,周围摄像机为副视场并且能够实时无缝拼接的全景摄像机。 2)由于飞行器在空中飞行时姿态在不断变化,需要自稳系统来减少图像摆动。为便于快速确定兴趣点的方位,图像不能随着飞行器航线的变化而旋转。 3)中心主视场可以精确定位,副视场存在可控变形,可以概略定位。 4)在现有图像传输设备的技术极限内,选择适当的无线图像传输格式和方式将图像传回地面进行处理和辨识。 5)必要的地面设备进行序列影像拼接,生成战术影像图和全景图像。 6)考虑到全景相机的大小,首先考虑飞行器应是无人直升机和无人飞艇设备。待设备小型化后,再考虑固定翼飞机。 2 目前已实现的地面全景监测技术 目前国内外全景数据采集的研究主要集中在地面采集,对于空中全景数据采集研究较少。地面全景数据的采集可以使用单摄像机旋转方式(图1)、多摄像机方式(图2)、单摄像机或多摄像机加光能收集方式(图3)。
飞控系统是无人机的核心控制装置,相当于无人机的大脑,是否装有飞控系统也是无人机区别于普通航空模型的重要标志。在经历了早期的遥控飞行后,目前其导航控制方式已经发展为自主飞行和智能飞行。导航方式的改变对飞行控制计算机的精度提出了更高的要求;随着小型无人机执行任务复杂程度的增加,对飞控计算机运算速度的要求也更高;而小型化的要求对飞控计算机的功耗和体积也提出了很高的要求。高精度不仅要求计算机的控制精度高,而且要求能够运行复杂的控制算法,小型化则要求无人机的体积小,机动性好,进而要求控制计算机的体积越小越好。 在众多处理器芯片中,最适合小型飞控计算机CPU的芯片当属TI公司的TMS320LF2407,其运算速度以及众多的外围接口电路很适合用来完成对小型无人机的实时控制功能。它采用哈佛结构、多级流水线操作,对数据和指令同时进行读取,片内自带资源包括16路10位A /D转换器且带自动排序功能,保证最多16路有转换在同一转换期间进行,而不会增加CPU 的开销;40路可单独编程或复用的通用输入/输出通道;5个外部中断;集成的串行通信接口(SCI),可使其具备与系统内其他控制器进行异步(RS 485)通信的能力;16位同步串行外围接口(SPI)能方便地用来与其他的外围设备通信;还提供看门狗定时器模块(WDT)和CAN通信模块。 飞控系统组成模块 飞控系统实时采集各传感器测量的飞行状态数据、接收无线电测控终端传输的由地面测控站上行信道送来的控制命令及数据,经计算处理,输出控制指令给执行机构,实现对无人机中各种飞行模态的控制和对任务设备的管理与控制;同时将无人机的状态数据及发动机、机载电源系统、任务设备的工作状态参数实时传送给机载无线电数据终端,经无线电下行信道发送回地面测控站。按照功能划分,该飞控系统的硬件包括:主控制模块、信号调理及接口模块、数据采集模块以及舵机驱动模块等。 模块功能 各个功能模块组合在一起,构成飞行控制系统的核心,而主控制模块是飞控系统核心,它与信号调理模块、接口模块和舵机驱动模块相组合,在只需要修改软件和简单改动外围电路的基础上可以满足一系列小型无人机的飞行控制和飞行管理功能要求,从而实现一次开发,多型号使用,降低系统开发成本的目的。系统主要完成如下功能: (1)完成多路模拟信号的高精度采集,包括陀螺信号、航向信号、舵偏角信号、发动机转速、缸温信号、动静压传感器信号、电源电压信号等。由于CPU自带A/D的精度和通道数有限,所以使用了另外的数据采集电路,其片选和控制信号是通过EPLD中译码电路产生的。
1.0 2.0 3.0 3.1 3.2 3.3 4.0 5.0 5.1 5.1.1 5.2 5.2.1 5.2.2 5.2.3 5.3 5.3.1目的 为规范使用无人机,妥善管理公司的固定资产,特制定本规程。 使用范围 仅限于与公司相关的业务 职责 人事行政负责人负责《无人机管理规程》的制定、修订及各部门执行的监督检查。行政助理负责车辆的日常管理、保管。 其他各部门负责人负责本部门《无人机管理规程》的宣传、培训、执行监管。 财务部负责人负责制度相关费用的账务管理工作。 弱电工程师负责无人机的使用期间的问题处理。 项目经理负责《无人机管理规程》的审核和作业流程的监察工作。 定义 无人机指公司购进的航拍器械。 程序文件 借用流程 借用人向人事行政部提交借用申请→审核通过→《借用登记表》(附件一)登记→委派工程技术部人员现场支持。 使用条例 使用前务必检查设备及其配件是否齐全完好,电池充足,存储卡使用空间是否足够; 停飞后检查设备及其配件是否齐全完好,导出数据并将电池充满后归还人事行政部; 飞行使用中如遇设备故障,立即采取处理措施,以不造成设备损坏为最高准则,同时参照航拍机维修条例执行操作。 使用注意事项 飞行前,请仔细检查螺旋桨是否损坏、老化,电池电量是否充足、其他部件是否
5.3.2 5.3.3 5.3.4 5.3.5 5.3.6 5.4 5.4.1 5.4.2 5.4.3 5.4.4 6.0 6.1 7.0 7.1应该更换或维修; 确保您的智能飞行电池、遥控器及其他设备电量充足; 请选择开阔空旷的飞行场地,远离人群及建筑物,请勿在人群或动物上方停留飞行; 根据相关法律规定,无人机飞行范围需在目视视距半径500米,相对高度120米范围内,确保飞机在您的视线之范围内,请勿在障碍物背面飞行,以减少操作不可控性,若违反相关法律规定将自行承担相关责任; 无人机飞行时必须考量现场天气、风向等因素,以减少操作不可控性; 飞行过程中,在使用自动功能时,如自动起飞、自动降落等,双手请不要离开遥控器,请始终保持对飞机控制; 在确认取得良好GPS信号后再起飞,并尽可能利用安全飞行功能,如自动返航,定点悬停等; 使用人管理 使用人应严格按照《无人机管理规程》使用无人机,如有违反责任自负。 使用人应爱惜公司财产,人为损失将自负。 使用人需学习《无人机使用学习教材》并经项目经理验证后授权。 使用人在使用过程中无人机发生失控故障时,立即停止遥控器的所有操作并第一时间向工程技术部报事。 支持文件 SAVILLS-CQ/YKJ-XZ-《无人机使用学习教材》 支持记录 SAVILLS-CQ/YKJ-XZ-《借用登记表》
关于无人机飞行控制系统的全面解析 飞控的大脑:微控制器在四轴飞行器的飞控主板上,需要用到的芯片并不多。目前的玩具级飞行器还只是简单地在空中飞行或停留,只要能够接收到遥控器发送过来的指令,控制四个马达带动桨翼,基本上就可以实现飞行或悬停的功能。意法半导体高级市场工程师介绍,无人机/多轴飞行器主要部件包括飞行控制以及遥控器两部分。其中飞行控制包括电调/马达控制、飞机姿态控制以及云台控制等。目前主流的电调控制方式主要分成BLDC方波控制以及FOC正弦波控制。 高通和英特尔推的飞控主芯片CES上我们看到了高通和英特尔展示了功能更为丰富的多轴飞行器,他们采用了比微控制器(MCU)更为强大的CPU或是ARM Cortex-A系列处理器作为飞控主芯片。例如,高通CES上展示的Snapdragon Cargo无人机是基于高通Snapdragon芯片开发出来的飞行控制器,它有无线通信、传感器集成和空间定位等功能。Intel CEO Brian Krzanich也亲自在CES上演示了他们的无人机。这款无人机采用了RealSense技术,能够建起3D地图和感知周围环境,它可以像一只蝙蝠一样飞行,能主动避免障碍物。英特尔的无人机是与一家德国工业无人机厂商Ascending Technologies合作开发,内置了高达6个英特的RealSense3D摄像头,以及采用了四核的英特尔凌动(Atom)处理器的PCI-express定制卡,来处理距离远近与传感器的实时信息,以及如何避免近距离的障碍物。这两家公司在CES展示如此强大功能的无人机,一是看好无人机的市场,二是美国即将推出相关法规,对无人机的飞行将有严格的管控。 多轴无人机的EMS/传感器某无人机方案商总经理认为,目前业内的玩具级飞行器,虽然大部分从三轴升级到了六轴MEMS,但通常采用的都是消费类产品如平板或手机上较常用的价格敏感型型号。在专业航拍以及专为航模发烧友开发的中高端无人机上,则会用到质量更为价格更高的传感器,以保障无人机更为稳定、安全的飞行。这些MEMS传感器主要用来实现飞行器的平稳控制和辅助导航。飞行器之所以能悬停,可以做航拍,是因为MEMS传感器可以检测飞行器在飞行过程中的俯仰角和滚转角变化,在检测到角度变化
UAV Low Altitude Marine Monitoring System Jie-liang Huang, Wen-yu Cai School of Electronics & Information Hangzhou Dianzi University Hangzhou, China E-mail: jieliang_huang@https://www.doczj.com/doc/1f5942597.html,, caiwy@https://www.doczj.com/doc/1f5942597.html, Abstract—As the human pays more and more attention to the exploration of marine resources, the marine activities show diversity. At the aspect of the exploration of some uncharted and potentially dangerous waters or islands, the marine low altitude surveillance UAV (unmanned aerial vehicle) is obviously very important. As a tool to obtain first-hand information, UAV can take off near the monitored area. Carrying with a high-definition camera, altimeter, GPS, barometric pressure and humidity sensors, the UAV can monitor the area for real-time, get the latitude and longitude of specific landmarks, measure altitude and barometric pressure and humidity and etc. Therefore we can have a general understanding of the whole area to eliminate risk factors. In addition, for different application environments, UAV can be equipped with different monitoring devices, which makes the application for more flexible and the areas for more diversity. Keywords-low altitude; UAV; high-definition cameras; altimeters; GPS; barometric pressure and humidity sensor I.I NTRODUCTION With the national marine economy being proposed, the low-altitude UAV remote sensing is applied to marine monitoring and monitors marine emergencies, marine disasters, marine environment dynamically with real-time tracking, to provide real-time field data for the marine forecasters for Rapid Alert and a scientific basis of decisions and solution for the marine management. Regardless of the protection of the marine disaster prevention and mitigation services and the need for the development of national high- tech, it is urgent to develop the real-time monitoring system of the marine environment with quick response and intensification and establish the report of efficient disaster warning service on the basis of new technology. Low-altitude UAV remote sensing marine monitoring as an monitoring technology of important and in the initial stage, on one hand, can do emergency response, without waiting for satellite transit or the limit of flying height of traditional aviation Airborne remote sensing; On the other hand, can overcome the defects of the optical remote sensing technology of traditional satellite in South cloudy and rainy weather and will greatly enhance the ability of monitoring Marine dynamically and urgently monitoring of disaster prevention and maneuver reduction, which provides quality services to the marine disaster prevention and mitigation, then escorts for the economic development of regional marine. This article will focus on UAV low altitude marine monitoring system with Art-tech Diamond 2500 Glider unmanned marine as the hardware platform, then describe the consist, the key technology and its applications of system. II.T HE C OMPOSITION OF S YSTEM UAV low-altitude Marine monitoring system consists of ground flight control system, aerial surveillance flight system, UAV driving flying platform, wireless HD video transmission system and so on. A.Ground Flight Control System Ground flight control systems is useful for the flight control of UAV and the processing and display of related data, including data transceiver module, debug interface, gesture controller(as shown in Fig.1). By the composition of wireless module, JTAG interface, the control handle, STM32 controller, PC terminal, it can be achieved on the UAV attitude, altitude, speed, heading, route control, with remote control and autonomous flight modes. In order to improve the reliability of the flight control system, the system uses the wireless transceiver module with a high transmission rate and low error rate to ensure that the control signals can be transmitted in real -time and received correctly. Because digital connection being instead of analog, which improves the accuracy of signal transmission and increases the anti-jamming capability. The body has the ability to be extended and flexible configuration, and some typical system components may be changed according to the needs of the missions. Figure 1. Ground flight control system. B.Aerial Surveillance Flight System Aerial surveillance flight system is response to the control signal of ground flight control system. It adjusts the flight of the UAV in real-time and collects relevant data information by a variety of sensors, which includes three parts of sensors, actuators and flight controller (as shown in Fig.2). By the composition of GPS module, battery voltage detection module, altimeter, barometer and humidity detection module, wireless module, attitude acquisition module, STM32 controllers, actuators, it can measure the location latitude and longitude, altitude, barometric pressure and humidity, life 2014 International Conference on Wireless Communication and Sensor Network
无人机飞行管理规定 1.从事通用航空飞行活动的单位、个人使用机场飞行空域、航路、航线,应当按照国家有关规定向飞行管制部门提出申请,经批准后方可实施。 2.从事通用航空飞行活动的单位、个人,根据飞行活动要求,需要划设临时飞行空域的,应当向有关飞行管制部门提出划设临时飞行空域的申请。划设临时飞行空域的申请,应当在拟使用临时飞行空域7个工作日前向有关飞行管制部门提出。负责批准该临时飞行空域的飞行管制部门应当在拟使用临时飞行空域3个工作日前作出批准或者不予批准的决定,并通知申请人。 以下摘取的部分无人机法规: (1)无人机(UA:Unmanned Aircraft),是由控制站管理(包括远程操纵或自主飞行)的航空器。也称远程驾驶航空器(RPA:Remotely Piloted Aircraft) (2)无人机系统(UAS:Unmanned Aircraft System),也称远程驾驶航空器系统(RPAS:Remotely Piloted Aircraft Systems),是指由无人机、相关的控制站、所需的指令与控制数据链路以及批准的型号设计规定的任何其他部件组成的系统。 (3)无人机系统驾驶员,由运营人指派对无人机的运行负有必不可少职责并在飞行期间适时操纵无人机的人。
(4)无人机系统的机长,是指在系统运行时间内负责整个无人机系统运行和安全的驾驶员。 (5)无人机观测员,由运营人指定的训练有素的人员,通过目视观测无人机,协助无人机驾驶员安全实施飞行,通常由运营人管理,无证照要求。 (6)运营人,是指从事或拟从事航空器运营的个人、组织或企业。 (7)控制站(也称遥控站、地面站),无人机系统的组成部分,包括用于操纵无人机的设备。 (8)指令与控制数据链路(C2:Commandand Control datalink),是指无人机和控制站之间为飞行管理之目的的数据链接。 (9)感知与避让,是指看见、察觉或发现交通冲突或其他危险并采取适当行动的能力。 (10)无人机感知与避让系统,是指无人机机载安装的一种设备,用以确保无人机与其它航空器保持一定的安全飞行间隔,相当于载人航空器的防撞系统。在融合空域中运行的Ⅺ、Ⅻ类无人机应安装此种系统。 (11)视距内(VLOS:Visual Line of Sight)运行,无人机在驾驶员或观测员与无人机保持直接目视视觉接触的范围内运行,且该范围为目视视距内半径不大于500米,人、机相对高度不大于120米。
最新版 无人机警用系统解决方案
一、无人机警用系统行业概述 1.行业概述 无人机凭借成本低、易操纵、高度灵活和稳定等优点,能够完成空中监控、日常巡逻、搜索跟踪等任务,受到了警务部门的青睐。公安干警和武警利用无人机来应对突发的社会事件,交警部门则用无人机来进行交通方面的管理,特警部门则利用无人机进行空中侦察抓捕罪犯等工作。总之,警用无人机在未来将会协助各个警察部门在公共安全领域发挥更为重要的作用。 2.行业应用 【1】无人机在社区民警领域的应用 一般而言,社区民警时公安派出所从事治安防范、管理和沟通群众的主要力,主要承担的职责有六项,即开展群众工作、掌握社情民意、管理实际人口、组织安全防范以及维护治安秩序、应急救助等服务。对于管辖范围较大、人口较为密集的地区,无人机的装备无疑为社区民警的工作带来了极大的提升。 (1)公共领域的常规巡查
对于片区治安来说,巡查是社区民警必不可少的一项工作。但是对于管辖区域大、人口密集且分散分布的地区,由于警务力量不足等因素,可能造成巡查存在漏洞,给犯罪分子以可乘之机。无人机一般可携带多种警务设备,包括高清数码摄像机、夜视仪等,可以帮助社区民警对管辖区域进行定时定线地巡查。不仅可以节省警务力量,而且有利于公安部门及时掌握相关区域的公共安全状况。 (2)大型集会的监控 无人机可对会场空中监控,提供高清画面,并可以快速机动到任何需要的区域上空,搜索发现地面可疑人员、车辆,提供强有力的空
中情报保障。将视频图像实时传输回指挥中心,指挥中心根据无人机传输回的资料对现场实时掌控,一旦发现突发情况,无人机可以第一时间发现,极大地提高了应急处理效率。 (3)聚众闹事事件的监控 无人机飞抵事故目标区域上空对目标区域进行全方位不间断的监控,为公安干警全面掌控事态提供了先决条件。警方可根据无人机拍摄的资料对事故责任方进行举证,同时可以了解目标区域的事件发展情况,及时形成相应的决策,防止事态失控。 (4)应对突发媒介失灵事件
无人机管控现状 全国空中交通管制二十四个分区:空军二十(4+4+3+4+5),海军四个。 五个战区、一个海军: 1、北部战区:长春、沈阳、大连、济南; 2、中部战区:北京、大同、西安、武汉; 3、南部战区:广州、南宁、昆明; 4、东部战区:上海、南京、福州、漳州; 5、西部战区:成都、乌鲁木齐、拉萨、兰州、鼎新; 6、海军:海口、宁波、山海关、青岛。 截至八月初,不完全统计,目前,四川、重庆、福建、云南、北京、天津、河北、新疆、广东、吉林、江苏、陕西等12个省市区陆续出台无人机相关的禁飞、限飞命令或通告;另外有深圳、石家庄、月牙泉、武汉、黄山、大连、柳州、扬州泰州、桂林、泉州、东莞、齐齐哈尔、无锡等十余个城市也在行者区域内禁限飞,或者在机场周边划出了大面积的净空保护区。 ?对于无人机申报管理有相当完善的政策与登记系统的省市区有: 香港特别行政区、澳门特别行政区; ?有具体政策出台,各相关部门分工明确的省市区有: 江苏省、广东省、江西省、重庆市、四川省、陕西省和黑龙江省; ?通过多方面咨询能了解大概流程,但没有明确政策,各部门没有明确分工的省市区有:北京市、天津市、上海市、浙江省、河南省、河北省、吉林省、宁夏回族自治区、辽宁省、甘肃省、山东省、安徽省、福建省、广西壮族自治区、海南省、湖北省、内蒙古自治区、新疆维吾尔自治区、贵州省和西藏自治区;
?暂时没有相关管理规定或无从得知相关信息的省市区有: 湖南省、青海省、台湾省、云南省和山西省。 5.17 全国 2017年1月至6月,全国发生了10余起航班备降或返航,影响旅客万余人。深圳、南京尤甚。 ●全国首批155个民航机场的禁飞区确立。 ●国家民航局发布《民用无人驾驶航空器实名制登记管理规定》。6月1日起,对质量在 250克以上的无人机实施注册登记。(基本上是个能飞的就比这个重吧微笑脸) 由于相关规定各省比较类似,仅列举几个出台明确规定的(仅摘录不是全部)。 6月陕西(中部战区) ●在陕西省范围内开展无人驾驶航空器飞行活动,应当飞行前一天15时前向94188部队 航空管制部门或民航空中管制部门提出申请,经批准后方可实施。 ●飞行计划申请单位(个人)应在组织飞行前2小时向申报飞行计划的航空管制部门提出 联系放飞事宜、经批准后方可组织飞行。组织飞行的单位(个人)要将航空器的起飞、降落时刻及时通报航管部门。 ●无人驾驶航空器飞行的计划申请内容包括:单位、航空器型号、架数、使用的机场或临 时起降点、任务性质、飞行区域、飞行高度、飞行日期、预计开始和结束时刻及现场人员联系方式等。 ●针对违规飞行行为将依照《中华人民共和国民用航空法》、《中华人民共和国治安管理处 罚法》、《通用航空飞行管制条例》等法律法规予以处罚 ●设置很多公园可供爱好者放飞