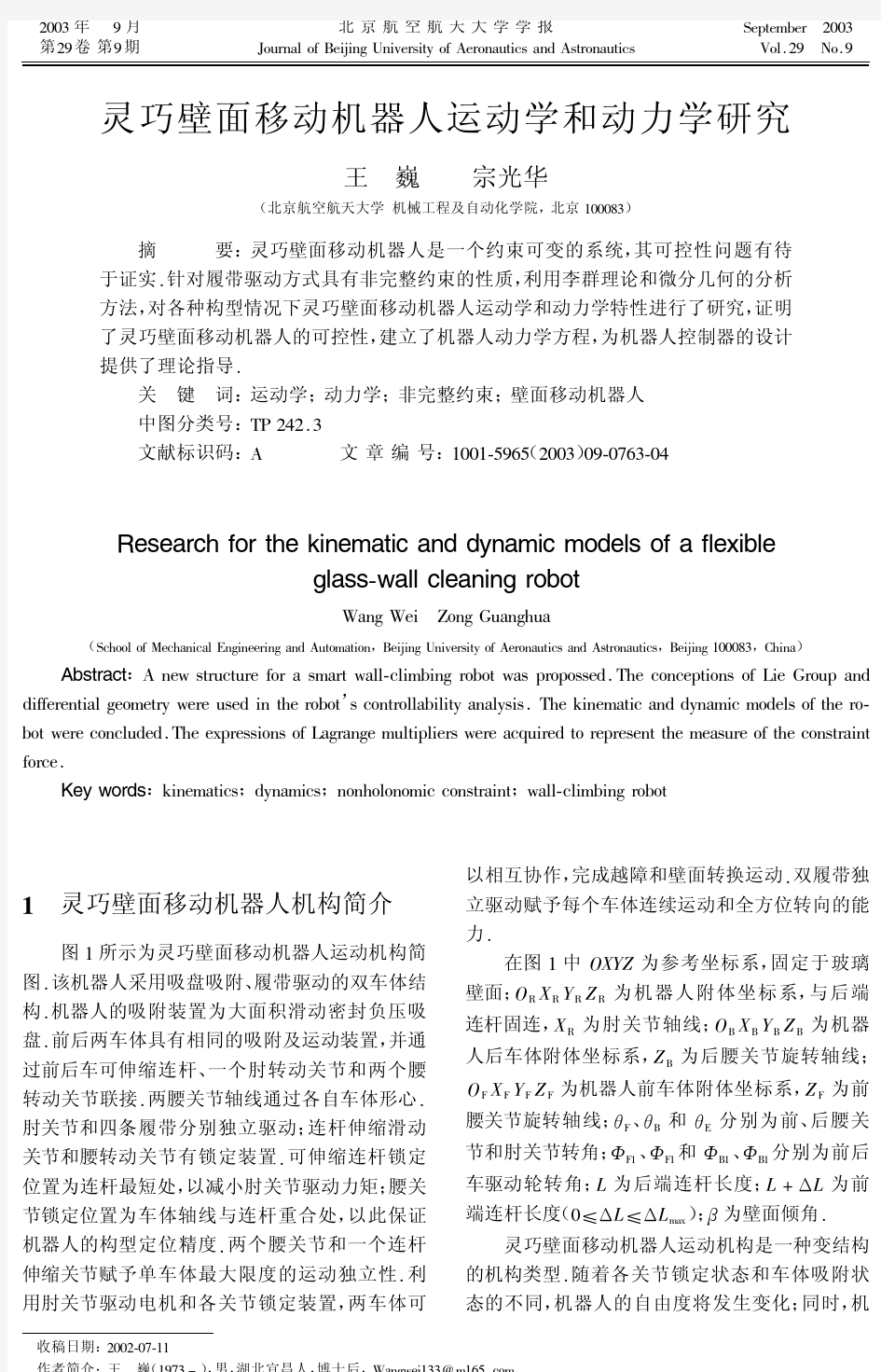
一、平面二连杆机器人手臂运动学 平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l 。建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 为连体坐标系,分别固结在连杆1和连杆2上并随它们一起运动。关节角顺时针为负逆时针为正。 图1平面双连杆机器人示意图 1、用简单的平面几何关系建立运动学方程 连杆2末段与中线交点处一点P 在基础坐标系中的位置坐标: ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (1) 2、用D-H 方法建立运动学方程 假定0z 、1z 、2z 垂直于纸面向里。从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 00sin cos 1 111 01θθ θθT (2) 从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 0sin cos 2 212212 θθ θθl T (3) 从),,(000z y x 到),,(222z y x 的齐次旋转变换矩阵为:
? ???? ???????+++-+=?? ??? ? ? ?? ???-?????????????-=?=10000100sin 0)cos()sin(cos 0)sin()cos( 1000010 000cos sin 0sin cos 1000 010000cos sin 00sin cos 1121211121212212 2111 1120102θθθθθθθθθθθθθθθθ θθl l l T T T (4) 那么,连杆2末段与中线交点处一点P 在基础坐标系中的位置矢量为: ? ?? ? ? ???????=????????????++++=? ? ? ?? ? ?????????????? ?? ???+++-+=?=110)sin(sin )cos( cos 10010000100sin 0)cos()sin(cos 0)sin()cos( 212112121121121211121212 020p p p z y x l l l l l l l P T P θθθθθθθθθθθθθθθθ (5) 即, ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (6) 与用简单的平面几何关系建立运动学方程(1)相同。 建立以上运动学方程后,若已知个连杆的关节角21θθ、,就可以用运动学方程求出机械手臂末端位置坐标,这可以用于运动学仿真。 3、平面二连杆机器人手臂逆运动学 建立以上运动学方程后,若已知个机械臂的末端位置,可以用运动学方程求出机械手臂二连杆的关节角21θθ、,这叫机械臂的逆运动学。逆运动学可以用于对机械臂关节角和末端位置的控制。对于本例中平面二连杆机械臂,其逆运动学方程的建立就是已知末端位置 ),(p p y x 求相应关节角21θθ、的过程。推倒如下。 (1)问题 ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p 已知末端位置坐标),(p p y x ,求关节角21θθ、。 (2)求1θ
Advanced Structural Dynamics Project The dynamic response and stability analysis of the beam under vertical excitation Instructor:Dr. Li Wei Name: Student ID:
1.Problem description and thepurpose of the project 1.1 calculation model An Eular beam subjected to an axial force. Please build thedifferential equation of motion and use a proper difference method to solve this differentialequation. Study the dynamic stability of the beam related to the frequency and amplitude of the force. As shown in the Fig 1.1. Fig1.1 1.2 purpose and process arrangement a.learninghow to create mathematical model of thecontinuous system and select proper calculation method to solve it. b.learning how to build beam vibration equation and solve Mathieu equation. https://www.doczj.com/doc/1a14846533.html,ing Floquet theory to judgevibration system’s stability and analyze the relationship among the frequency and amplitude of the force and dynamic response. This project will introduce the establishment of the mathematical model of the continuous system in section 2, the movement equation and the numerical solution of using MATLAB in section 3,Applying Floquent theory to study the dynamic stability of the beam related to the frequency and amplitude of the force in section 4. In the last of the project, we get some conclusions in section 5.
宁波大学研究生期末考试答题纸(答案必须写在答题纸上) 姓名:王冠琼 _____________ 学号:1111083022 ____________ 课程名称:高等结构动力学
结构动力学和静力学的本质区别为是否考虑惯性力的影响。结构产生动力反应的内因(本质因素)是惯性力。惯性力的出现使分析工作变得复杂,而对惯性力的了解和有效处理又可使复杂的动力问题分析得以简化。在结构动力反应分析中,有时可通过对惯性力的假设而使动力计算大为简化,如在框架结构地震反应分析 中常采用的层模型。惯性力的产生是由结构的质量引起的,对结构中质量位置及其运动的描述是结构动力分析中的关键,这导致了结构动力学和结构静力学中对结构体系自由度定义的不同。 动力自由度(数目):动力分析中为确定体系任一时刻全部质量的几何位置所需要的独立参数的数目。独立参数也称为体系的广义坐标,可以是位移、转角或其它广义量。 3.结构动力问题的分类 一般可以将动力荷载分为确定性荷载和非确定性荷载。 确定性荷载的变化规律是完全确定的,无论是周期的还是非周期的,它们均可以用确定性的函数来表达。常见的确定性荷载有:简谐荷载、周期荷载、冲击荷载和持续长时间的非周期荷载。 非确定性荷载又称为随机荷载,它随时间的变化规律是预先不可以确定的,而是一种随机过程,例如,地震荷载、风荷载和作用在船舶与海洋结构物上的波浪力等。随机过程虽然不可以表示为时间的确定性函数,但是它们受统计规律的制约,需要用概率统计的方法来研究随机荷载作用下结构振动。 此外,有些荷载具有明显的非线性性质,例如,作用在海洋结构物上的波浪力是非线性的,非线性的荷载将激起机构系统的非线性振动。 综上所述,可以将结构的动力问题划分为: ①线性确定性振动,即结构自身是线性的并且承受线性荷载的作用; ②线性随机振动,即结构自身为线性的,荷载为随机的; ③非线性确定振动,即结构系统自身性质或者荷载为非线性的; ④非线性随机振动,即结构系统自身性质为非线性的而荷载为随机的,或者为非线性随机荷载。 4.结构系统的动力自由度及其离散 动力问题的特点之一是要考虑结构体系的惯性力,所以在确定计算简图时,必须明确系统的质量分布及其可能发生的位移,以便全面合理地确定系统的惯性力。系统振动时,确定任一时刻全部质量位移所需要的独立的几何参变量的数目,称为结构系统的动力自由度。要准确地描述系统的惯性力,合理地选择动力自由度是十分重要的。 一切结构系统都具有分布质量,因而都是无限自由度系统。但是除了某些简单的结构可以作为无限自由度处理以外,大多数的工程结构作为无限自由度计算将是极其困难的。在结构动力计算时,为了避免过于繁杂和数学上的困难,一般将结构处理为有限自由度系统,这一过程称为结构系统的离散。 以下是几种常用的离散方法: 1)集中质量法图1-1简支梁上有?三个较重的质量,其质量远大于梁结构自身的质量。若将梁的质量也集中到这些质量块上,则转化为有若干个质量块的有限自由度系统。对于在平面内振动的质量块,存在三个自由度即两个线位移和一个转角,相应地,每个质量块便有两个惯性力和一个惯性转矩,如果质量块的尺寸相对于梁的长度是较小的, 则可以忽略质量块的尺寸效应,即不计惯性转矩。因而转角也就可以不作为动力自由
结构动力学课程总结与进展综述 首先谈一下我对高等结构动力学课程的认识。结构动力学研究结构系统在动力荷载作用下的位移和应力的分析原理和计算方法。它是振动力学的理论和方法在一些复杂工程问题中的综合应用和发展,是以改善结构系统在动力环境中的安全和可靠性为目的的。这门课的主要内容包括运动方程的建立、单自由度体系、多自由度体系、无限自由度体系的动力学问题、随机振动、结构抗震计算及结构动力学的前沿研究课题。既有线性系统的计算,又有非线性系统的计算;既有确定性荷载作用下结构动力影响的计算,又有随机荷载作用下结构动力影响的随机振动问题;阻尼理论既有粘性阻尼计算,又有滞变阻尼、摩擦阻尼的计算。我们是航空院校,当然我们所修的高等结构动力学主要针对的是飞行器结构。这门课程很难,我通过课程和考试学到了不少东西,当然,也有很多东西不懂,我的研究方向是动力学结构优化设计,其中我对于目前的灵敏度分析研究比较感兴趣,这门课程是我以后学习的基础。 二十世纪中叶,计算机科学发展迅速,有限元方法得到长足进步,使得力学,特别是结构力学的研究方向发生了重大变化,研究范围也得以拓宽。长期处于被动状态的结构分析,转化到主动的结构优化设计,早期的结构优化设计,考虑的是静强度问题。但实践指出,许多工程结构,例如飞行器,其重大事故大多与动强度有关。同理,在航天、土木、桥梁等具有结构设计业务的工作部门,运用结构动力学优化设计技术,必将带来巨大的经济效益。20世纪60年代,动力学设计也称动态设计(dynamic design)开始兴起,但真正的发展则在八、九十年代,现正处于方兴未艾之际。“动态设计”一词常易引起误解,逐被“动力学设计”所取代。进入90年代以来,结构动力学优化设计的研究呈现出加速发展的态势,在许多方面取得了令人耳目一新的成果。尽管如此,它的理论和方法尚有待系统和完善,其软件开发和应用与工程实际还存在着较大的距离,迄今尚存在着许多未能很好解决甚至尚未涉足的问题。因此,结构动力学优化设计今后的研究任重而道远,将充满众多困难和障碍,面临各种新的挑战,但它的学术价值和发展前景也异常诱人和辉煌。 在结构动力学优化设计的初期采用的是分布参数设计法,它属于解析方 法,Niordson率先应用此种方法研究了简支梁固有频率最大化的设计问题,利用拉
国防科学技术大学 硕士学位论文 仿人机器人运动学和动力学分析 姓名:王建文 申请学位级别:硕士 专业:模式识别与智能系统 指导教师:马宏绪 20031101
能力;目前,ASIMO代表着仿人机器人研究的最高水平,见图卜2。2000年,索尼公司也推出了自己研制的仿人机器人SDR一3X,2002年又研制出了SDR一4X,见图卜3。日本东京大学也一直在进行仿人机器人的研究,与Kawada工学院合作相继研制成功了H5、H6和H7仿人机器人,其中H6机器人高1.37米,体重55公斤,具有35个自由度,目前正在开发名为Isamu的新一代仿人机器人,其身高1.5米,体重55公斤,具有32个自由度。日本科学技术振兴机构也在从事PINO机器人的研究,PINO高0.75米,采用29个电机驱动,见图卜4。日本Waseda大学一直在从事仿人机器人研究计划,研制的wL系列仿人机器人和WENDY机器人在机器人界有很大的影响,至今已投入100多万美元,仍在研究之中。Tohoku大学研制的Saika3机器人高1.27米,重47公斤,具有30个自由度。美国的MIT和剑桥马萨诸塞技术学院等单位也一直在从事仿人机器人研究。德国、英国和韩国等也有很多单位在进行类似的研究。 图卜1P2机器人图卜2ASIMO机器人图1.3SDR-4X机器人图1-4PINO机器人 图卜5第一代机器人图l-6第二代机器人图1.7第三代机器人图1—8第四代机器人 在国家“863”高技术计划和自然科学基金的资助下,国内也开展了仿人机器人的研究工作。目前,国内主要有国防科技大学、哈尔滨工业大学和北京理工大学等单位从事仿人机器人的研究。国防科技大学机器人实验室研制机器人已有10余年的历史,该实验室在这期间分四阶段推出了四代机器人,其中,2000年底推出的仿人机器入一“先行者”一是国内第一台仿人机器人。2003年6月,又成功研制了一台具有新型机械结构和运动特性的仿人机器人,这台机器人身高1.55米,体重63.5公斤,共有36个自由度,脚踝有力 第2页
精心整理 一、平面二连杆机器人手臂运动学 平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l ,连杆3长度为3l 。建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 、33(,)x y 为连体坐标系,分别固结在连杆1、连杆2、连杆3上并随它们一起运动。关节角顺时针为负逆时针为正。 1 θ 图11112123123p p x y 2、用D-H 方法建立运动学方程 假定0z 、1z 、2z 垂直于纸面向外。从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 00sin cos 1 11101 θθ θθT (2)
从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 0sin cos 2 212212θθ θθl T (3) 从222(,,)x y z 到333(,,)x y z 的齐次旋转变换矩阵为: 33212cos sin 0l T θθ-????=从(003T =003P =结论:(6)与用简单的平面几何关系建立运动学方程(1)相同。 补充:正解用于仿真,逆解用于控制 建立以上运动学方程后,若已知个连杆的关节角123θθθ、、,就可以用运动学方程求出机械手臂末端位置坐标,这可以用于运动学仿真。 3、平面二连杆机器人手臂逆运动学 二、平面二连杆机器人手臂的速度雅可比矩阵 速度雅可比矩阵的定义:从关节速度向末端操作速度的线性变换。现已二连杆平面机器人为例推导速度雅可比矩阵。 上面的运动学方程两边对时间求导,得到下面的速度表达式:
复模态分析基础 ?1. 引言1-粘性阻尼单自由度系统自由振动?2. 引言2-对称阻尼矩阵 ?3. 物理空间的复模态 ?4. 状态空间的复模态 ?5. 复模态叠加法 董兴建 上海交通大学振动,冲击,噪声研究所 机械大楼A832
1. 引言1-粘性阻尼单自由度系统自由振动 粘性阻尼单自由度系统自由振动方程 2c n m = 进一步令0mx cx kx ++= 定义:2n k m w =那么有:220 n x nx x w ++= n n z w = 从而有 () 12(cos sin )cos n n t d d t d x e c t c t e A t zw zw w w w q --=+=-衰减系数n 相对阻尼系数 z 特征根: 21,21n n s i zw w z =- -阻尼固有频率 2 1d n w w z =-欠阻尼自由振动解: () 12cos sin cos n n n x c t c t A t w w w q =+=-无阻尼自由振动解: 2 20 n n x x x zw w ++=
实际机械系统中不可避免地存在着阻尼:材料的结构阻尼,介质的粘性阻尼等. 阻尼力机理复杂,难以给出恰当的数学表达 在阻尼力较小时,或激励远离系统的固有频率时,可以忽略阻尼力的存在,近似地当作无阻尼系统 当激励的频率接近系统的固有频率,激励时间又不是很短暂的情况下,阻尼的影响是不能忽略的。 一般情况下,可将各种类型的阻尼化作等效粘性阻尼
有阻尼的n 自由度系统: ()x x x t ++=M C K P n x R ?ΦΛ假定已经得到无阻尼系统下的模态矩阵及谱矩阵作坐标变换 x h =ΦT T T T () t h h h ++=ΦM ΦΦC ΦΦK ΦΦP ()p p p t h h h ++=M C K Q T p =C ΦC Φ 模态阻尼矩阵 虽然主质量矩阵与主刚度矩阵是对角阵,但阻尼矩阵一般非 对角阵,因而主坐标下的强迫振动方程仍然存在耦合。 h
《高等结构动力学》教学大纲 课程编号: 英文名称:Advanced Structural Dynamics 课程类别:学位课学时:60学分:3 适用专业:结构工程 先修课程:结构动力学、随机过程、 课程内容: 内容:主要介绍高等结构动力学的理论以及确定性的工程结构在随机干扰下的动力分析方法。。 预期目标:使学生了解高等结构动力学和随机振动的研究内容,培养学生综合利用以前学习过的知识的能力,提高学生的分析能力。 重点和难点:主要研究多自由度系统的一般理论、Lagrange运动方程、具有分布参数体系的运动的偏微分方程、无阻尼自由振动分析动力反应分析、动力直接刚度法、多自由度系统模态与频率的数值计算以及振动分析的有限元模型、非线性振动;模态分析的理论基础;子结构方法;常见随机干扰常用的功率谱以及数字模拟方法;具有经典阻尼器多自由度线性体系随机响应的振型分解法求解步骤;随机状态反应分析的一般理论以及过滤白噪声的表达方式;FPK方法,统计矩截断法,随机摄动法,随机等价线性化求解非线性体系随机振动的基本思路;滞变体系的非线性随机振动;虚拟激励法求解多自由度线性体系的原理和步骤。。教材: 1、R.W.Clough, J.Penzien, Dynamics of structures (2nd Edition), McGraw-Hill Inc, 1993 2、Roy R. Craig Jr 常岭李振邦. 结构动力学. 北京:人民交通出版社1996 3、欧进萍、王光远. 结构随机振动. 北京:高等教育出版社,1998 4、林家浩,张亚辉. 随机振动的虚拟激励法. 北京:科学出版社,2004 参考书目: 1、俞载道,结构动力学基础,上海:同济大学出版社1987 2、A.K.Chopra, Dynamics of structures: Theory and application to earthquake and Engineering (2nd Edition), 北京:清华大学出版社2005 3、S.Timoshenko, D.H.Young, W.Weaver, Vibration problems in engineering, John Wiley & Sons, 1974 4、A.H.Nayfeh, D.T.Mook, Nonlinear oscillations, John Wiley & Sons, 1978
西南交通大学研究生试试卷 课程代码A11101课程名称建筑结构高等动力学考试时间150分钟 阅卷教师签字: 一、是非题(将判断结果填入括弧:以O 表示正确,以X 表示错误) (本大题共5小题,总计10分) 1.图a 示两端固定梁的自振频率大于图b 示简支梁的自振频率。 ( ) 2.在图示结构中,若要使其自振周期T 增大,可以增大EI 。 ( ) 3.简谐荷载作用于单自由度体系时,干扰力频率越接近自振频率,动力系数 (绝对值)越大。 ( ) 4.增加约束使得体系的频率减小或保持不变。( ) 5.设不考虑阻尼因素,承受简谐荷载(同频率、同相角)的多自由度体系,稳态时任意一点的内力与荷载同时达到幅值。 ( ) 二、选 择题(将选中答案的字母填入括弧内)(本大题共5小题,总计15分) 1.设有图示桁架,若不考虑各杆重量时,其动力自由度为: A .单自由度; B .两个自由度; C .三个自由度; D .四个自由度。 ( ) 2
2.图示体系受动力荷载作用,杆重不计,不考虑阻尼,当发生共振时,θ值应为: A .()3 /4ma EI ;B . ()33/4ma EI ; C . ()3 7/3ma EI ;D . ( )3 /3ma EI 。 3. 体系的跨度、约束、质点位置不变,下列哪种情况周期最短: A .质量小 ,刚度小; B .质量大 ,刚度大 ; C .质量小 ,刚度大; D .质量大 ,刚度小 。 ( ) 4. 多自由度体系的自振频率和振型取决于: A .干扰力的大小和方向; B .初始位移; C .结构的质量分布和刚度(或柔度)系数; D .初始速度 。 ( ) 5.从以下三式中选一合适的曲线方程,用能量法求图示体系的第一频率。设EI = 常数。(式中A 、f 为常数 ) A .(1cos(/2))y A x l π=-; B .2334(16/5)(2)y f l l x lx x =-+; C .(/2)(1cos(2/))y f x l π=-; D .()( )2 24 2 (16/5)/4y f l x x l =-。 ( ) 三、填充题(将答案写在空格内)(本大题共3小题,总计12分) 1.图示体系不计阻 尼,(θ ω=为自振频率),其动力系数为 。 ok 2.图示单自由度动力体系中,质量 m 在杆件中点,各杆 EI 、l 相同。其自振频率的大小排列次序为 。 (a) (b) (c)
首先谈一下我对高等结构动力学课程的认识。结构动力学研究结构系统在动力荷载作用下的位移和应力的分析原理和计算方法。它是振动力学的理论和方法在一些复杂工程问题中的综合应用和发展,是以改善结构系统在动力环境中的安全和可靠性为目的的。这门课的主要内容包括运动方程的建立、单自由度体系、多自由度体系、无限自由度体系的动力学问题、随机振动、结构抗震计算及结构动力学的前沿研究课题。既有线性系统的计算,又有非线性系统的计算;既有确定性荷载作用下结构动力影响的计算,又有随机荷载作用下结构动力影响的随机振动问题;阻尼理论既有粘性阻尼计算,又有滞变阻尼、摩擦阻尼的计算。我们是航空院校,当然我们所修的高等结构动力学主要针对的是飞行器结构。这门课程很难,我通过课程和考试学到了不少东西,当然,也有很多东西不懂,我的研究方向是动力学结构优化设计,其中我对于目前的灵敏度分析研究比较感兴趣,这门课程是我以后学习的基础。 二十世纪中叶,计算机科学发展迅速,有限元方法得到长足进步,使得力学,特别是结构力学的研究方向发生了重大变化,研究范围也得以拓宽。长期处于被动状态的结构分析,转化到主动的结构优化设计,早期的结构优化设计,考虑的是静强度问题。但实践指出,许多工程结构,例如飞行器,其重大事故大多与动强度有关。同理,在航天、土木、桥梁等具有结构设计业务的工作部门,运用结构动力学优化设计技术,必将带来巨大的经济效益。20世纪60年代,动力学设计也称动态设计(dynamic design)开始兴起,但真正的发展则在八、九十年代,现正处于方兴未艾之际。“动态设计”一词常易引起误解,逐被“动力学设计”所取代。进入90年代以来,结构动力学优化设计的研究呈现出加速发展的态势,在许多方面取得了令人耳目一新的成果。尽管如此,它的理论和方法尚有待系统和完善,其软件开发和应用与工程实际还存在着较大的距离,迄今尚存在着许多未能很好解决甚至尚未涉足的问题。因此,结构动力学优化设计今后的研究任重而道远,将充满众多困难和障碍,面临各种新的挑战,但它的学术价值和发展前景也异常诱人和辉煌。 在结构动力学优化设计的初期采用的是分布参数设计法,它属于解析方法,Niordson率先应用此种方法研究了简支梁固有频率最大化的设计问题,利用拉格朗日乘子法导出了梁最优截面应满足的方程。由于该方程直接求解的困难,故
平面二自由度机械臂动力学分析 [摘要] 机器臂是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。本文采用拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。经过研究得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。 [关键字] 平面二自由度 一、介绍 机器人是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,简化解的过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。 机器人动力学问题有两类: (1) 给出已知的轨迹点上的,即机器人关节位置、速度和加速度,求相应的关节力矩向量Q r。这对实现机器人动态控制是相当有用的。 (2) 已知关节驱动力矩,求机器人系统相应的各瞬时的运动。也就是说,给出关节力矩向量τ,求机器人所产生的运动。这对模拟机器人的运动是非常有用的。 二、二自由度机器臂动力学方程的推导过程 机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。机器人动力学方程的具体推导过程如下: (1) 选取坐标系,选定完全而且独立的广义关节变量θr ,r=1, 2,…, n。 (2) 选定相应关节上的广义力F r:当θr是位移变量时,F r为力;当θr是角度变量时, F r为力矩。 (3) 求出机器人各构件的动能和势能,构造拉格朗日函数。 (4) 代入拉格朗日方程求得机器人系统的动力学方程。 下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
高等结构动力学总结-标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
结构动力学课程总结与进展综述 首先谈一下我对高等结构动力学课程的认识。结构动力学研究结构系统在动力荷载作用下的位移和应力的分析原理和计算方法。它是振动力学的理论和方法在一些复杂工程问题中的综合应用和发展,是以改善结构系统在动力环境中的安全和可靠性为目的的。这门课的主要内容包括运动方程的建立、单自由度体系、多自由度体系、无限自由度体系的动力学问题、随机振动、结构抗震计算及结构动力学的前沿研究课题。既有线性系统的计算,又有非线性系统的计算;既有确定性荷载作用下结构动力影响的计算,又有随机荷载作用下结构动力影响的随机振动问题;阻尼理论既有粘性阻尼计算,又有滞变阻尼、摩擦阻尼的计算。我们是航空院校,当然我们所修的高等结构动力学主要针对的是飞行器结构。这门课程很难,我通过课程和考试学到了不少东西,当然,也有很多东西不懂,我的研究方向是动力学结构优化设计,其中我对于目前的灵敏度分析研究比较感兴趣,这门课程是我以后学习的基础。 二十世纪中叶,计算机科学发展迅速,有限元方法得到长足进步,使得力学,特别是结构力学的研究方向发生了重大变化,研究范围也得以拓宽。长期处于被动状态的结构分析,转化到主动的结构优化设计,早期的结构优化设计,考虑的是静强度问题。但实践指出,许多工程结构,例如飞行器,其重大事故大多与动强度有关。同理,在航天、土木、桥梁等具有结构设计业务的工作部门,运用结构动力学优化设计技术,必将带来巨大的经济效益。20世纪60年代,动力学设计也称动态设计(dynamic design)开始兴起,但真正的发展则在八、九十年代,现正处于方兴未艾之际。“动态设计”一词常易引起误解,逐被“动力学设计”所取代。进入90年代以来,结构动力学优化设计的研究呈现出加速发展的态势,在许多方面取得了令人耳目一新的成果。尽管如此,它的理论和方法尚有待系统和完善,其软件开发和应用与工程实际还存在着较大的距离,迄今尚存在着许多未能很好解决甚至尚未涉足的问题。因此,结构动力学优化设计今后的研究任重而道远,将充满众多困难和障碍,面临各种新的挑战,但它的学术价值和发展前景也异常诱人和辉煌。 在结构动力学优化设计的初期采用的是分布参数设计法,它属于解析方法,Niordson率先应用此种方法研究了简支梁固有频率最大化的设计问题,利
电子科技大学 实验报告 学生姓名: 一、实验室名称:机电一体化实验室 二、实验项目名称:实验三SCARA 学号: 机器人的运动学分析 三、实验原理: 机器人正运动学所研究的内容是:给定机器人各关节的角度,计算机器人末端执行器相对于参考坐标系的位置和姿态问题。 各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学方程) 为: n x o x a x p x 0T40T1 11T2 22T3 d3 n y o y a y p y ( 1-5)3T4 4= o z a z p z n z 0001 式 1-5 表示了 SCARA 手臂变换矩阵0 T4,它描述了末端连杆坐标系{4} 相对基坐标系 {0} 的位姿,是机械手运动分析和综合的基础。 式中: n x c1c2c4s1 s2 c4 c1 s2s4s1 c2 s4,n y s1c2 c4c1 s2 c4s1 s2 s4c1c2 s4 n z0 , o x c1c2 s4s1 s2 s4 c1 s2 c4s1c2c4 o y s1c2 s4c1 s2 s4s1 s2 c4c1c2c4 o z0 , a x0 , a y0 , a z1 p x c1 c2 l2s1s2l 2c1l 1, p y s1c2 l 2 c1 s2 l 2 s1l1, p z d3 机器人逆运动学研究的内容是:已知机器人末端的位置和姿态,求机器人对应于这个位置和姿态的全部关节角,以驱动关节上的电机,从而使手部的位姿符合要求。与机器人正运动学分析不同,逆问题的解是复杂的,而且具有多解性。
1)求关节 1: 1 A arctg 1 A 2 l 12 l 22 p x 2 p y 2 arctg p x 式中:A p x 2 ; p y 2l 1 p y 2 2)求关节 2: 2 r cos( 1 ) arctg ) l 1 r sin( 1 式中 : r p x 2 p y 2 ;arctg p x p y 3). 求 关节变 量 d 3 令左右矩阵中的第三行第四个元素(3.4)相等,可得: d 3 p z 4). 求 关节变 量 θ 4 令左右矩阵中的第二行第一个元素(1.1,2.1 )相等,即: sin 1 n x cos 1n y sin 2 cos 4 cos 2 sin 4 由上式可求得: 4 arctg ( sin 1 n x cos 1 n y )2 cos 1 n x sin 1 n y 四、实验目的: 1. 理解 SCARA 机器人运动学的 D-H 坐标系的建立方法; 2. 掌握 SCARA 机器人的运动学方程的建立; 3. 会运用方程求解运动学的正解和反解; ( 1-8) ( 1-9) ( 1-10 )
第六章 机器人运动学及动力学 6.1 引论 到现在为止我们对操作机的研究集中在仅考虑动力学上。我们研究了静力位置、静力和速度,但我们从未考虑过产生运动所需的力。本章中我们考虑操作机的运动方程式——由于促动器所施加的扭矩或作用在机械手上的外力所产生的操作机的运动之情况。 机构动力学是一个已经写出很多专著的领域。的确,人们可以花费以年计的时间来研究这个领域。显然,我们不可能包括它所应有的完整的内容。但是,某种动力学问题的方程式似乎特别适合于操作机的应用。特别是,那种能利用操作机的串联链性质的方法是我们研究的天然候选者。 有两个与操作机动力学有关的问题我们打算去解决。向前的动力学问题是计算在施加一 组关节扭矩时机构将怎样运动。也就是,已知扭矩矢量τ,计算产生的操作机的运动Θ、Θ 和Θ 。这个对操作机仿真有用,在逆运动学问题中,我们已知轨迹点Θ、Θ 和Θ ,我们欲求出所需要的关节扭矩矢量τ。这种形式的动力学对操作机的控制问题有用。 6.2 刚体的加速度 现在我们把对刚体运动的分析推广到加速度的情况。在任一瞬时,线速度矢量和角速度矢量的导数分别称为线加速度和角加速度。即 B B Q Q B B Q Q 0V ()V ()d V V lim dt t t t t t ?→+?-==? (6-1) 和 A A Q Q A A Q Q 0()()d lim dt t t t t t ?→Ω+?-ΩΩ=Ω=? (6-2) 正如速度的情况一样,当求导的参坐标架被理解为某个宇宙标架{}U 时我们将用下面的记号 U A AORG V V = (6-3) 和 U A A ω=Ω (6-4)
6.2.1 线加速度 我们从描述当原点重合时从坐标架{}A 看到的矢量B Q 的速度 A A B A A Q B Q B B V V B R R Q =+Ω? (6-5) 这个方程的左手边描述A Q 如何随时间而变化。所以,因为原点是重合的,我们可以重写(6-5)为 A A B A A B B Q B B d ()V dt B B R Q R R Q =+Ω? (6-6) 这种形式的方程式当推导对应的加速度方程时特别有用。 通过对(6-5)求导,我们可以推出当{}A 与{}B 的原点重合时从{}A 中看到的B Q 的 加速度表达式 A A B A A A A Q B Q B B B B d d V (V )()dt dt B B R R Q R Q =+Ω?+Ω? (6-7) 现在用(6-6)两次── 一次对第一项,一次对最后一项。(6-7)式的右侧成为: A B A A A A B Q B B Q B B A A A A B B Q B B V () +Ω?+Ω?+Ω?+Ω? B B B B R R V R Q R V R Q (6-8) 把相同两项合起来 A B A A A A B Q B B Q B B A A A B B B V 2 () +Ω?+Ω?+Ω?Ω? B B B R R V R Q R Q (6-9) 最后,为了推广到原点不重合的情况,我们加上一项给出{}B 的原点的线加速度的项,得到下面的最后的一般公式 A B A A A A BORG B Q B B Q B B A A A B B B V 2 () ++Ω?+Ω?+Ω?Ω? A B B B V R R V R Q R Q (6-10) 对于我们将在本章上考虑的情况,我们总是有B Q 为不变,或 B Q Q V 0== B V (6-11) 所以,(6-10)简化为 A A A A A A Q BORG B B B B B V ()=+Ω?Ω?+Ω? A B B V R Q R Q (6-12) 我们将用这一结果来计算操作机杆件的线加速度。 6.2.2 角加速度 考虑{}B 以A B Ω相对于{}A 转动的情况,而{}C 以B C Ω相对于{}B 转动。为了计算 A C Ω我们把矢量在坐标架{}A 中相加
六轴联动机械臂运动学及动力学求解分析 V0.9版 随着版本的不断更新,旧版本文档中的一些笔误得到了修正,同时文档内容更丰富,仿真程序更完善。 作者朱森光 Email zsgsoft@https://www.doczj.com/doc/1a14846533.html, 完成时间 2016-02-28
1引言 笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。笔者从事的工作是软件开发,工作内容跟机器人无关,但不妨碍研究机器人运动学及动力学,因为机器人运动学及动力学用到的纯粹是数学和计算机编程知识,学过线性代数和计算机编程技术的人都能研究它。利用业余时间翻阅了机器人运动学相关资料后撰写此文,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术文章。本文内容的正确性经过笔者编程仿真验证可以信赖。 2机器建模 既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右方向为X轴,屏幕竖直向上方向为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。 图2-1 图2-1中的机械臂,底部灰色立方体示意机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色长方体示意关节2,它能绕图中的Z1轴旋转;蓝色长方体示意关节3,它能绕图中的Z2轴旋转;绿色长方体示意关节4,它能绕图中的X3轴旋转;深灰色长方体示意关节5,它能绕图中的Z4轴旋转;末端浅灰色机构示意关节6即最终要控制的机械手,机器人代替人的工作就是通过这只手完成的,它能绕图中的X5轴旋转。这儿采用关节这个词可能有点不够精确,先这么意会着理解吧。 3运动学分析 3.1齐次变换矩阵 齐次变换矩阵是机器人技术里最重要的数学分析工具之一,关于齐次变换矩阵的原理很多教科书中已经描述在此不再详述,这里仅针对图2-1的机械臂写出齐次变换矩阵的生成过程。首先定义一些变量符号,关节1绕图中Y轴旋转的角度定义为θ0,当θ0=0时,O1点在OXYZ坐标系内的坐标是(x0,y0,0);关节2绕图中的Z1轴旋转的角度定义为θ1,图中的θ1当前位置值为+90度;定义O1O2两点距离为x1,关节3绕图中的Z2轴旋转的角度定义为θ2,图中的θ2当前位置值为-90度;O2O3两点距离为x2,关节4绕图中的X3轴旋转的角度定义为θ3, 图中的θ3当前位置值为0度;O3O4两点距离为x3,关节5绕图中的Z4轴旋转的角度定义为θ4, 图中的θ4当前位置值为-60度;O4O5两点距离为x4,关节6绕图中的X5轴旋转的角度定义为θ5, 图中的θ5当前位置值为0度。以上定义中角度正负值定义符合右手法则,所有角度定义值均为本关节坐标系相对前一关节坐标系的相对旋转角度值(一些资料上将O4O5两点重合在一起即O4O5两点的距离x4退化为零,本文定义x4大于零使得讨论时更加不失一般性)。符号定义好了,接下来描述齐次变换矩阵。 定义R0为关节1绕Y轴的旋转矩阵 =cosθ0 s0 = sinθ0 //c0 R0 =[c0 0 s0 0 0 1 0 0 0 c0 0 -s0 0 0 0 1] 定义T0为坐标系O1X1Y1Z1相对坐标系OXYZ的平移矩阵 T0=[1 0 0 x0 0 1 0 y0 00 1 0 0 0 0 1] 定义R1为关节2绕Z1轴的旋转矩阵 R1=[c1 –s1 0 0 s1 c1 0 0
目录 1. 引言 (2) 1.1 结构动力学研究的基本内容 (2) 1.1.1 结构动力学的任务 (2) 1.1.2 结构动力学的三要素 (2) 1.1.3 结构动力学的研究范畴 (2) 1.2 结构动力学研究的基本方法 (2) 1.2.1 研究步骤 (2) 1.2.2 建模 (2) 1.2.3 分析与求解 (3) 2. 单自由度系统动力反应分析 (4) 2.1 无阻尼单自由度系统的自由振动 (4) 2.2 有阻尼单自由度系统的自由振动 (5) 2.3 单自由度系统强迫振动 (8) 2.4 简谐位移运动引起的振动 (10) 2.5 一般周期力引起的振动 (10) 2.6 对一般动力荷载的反应 (11) 2.7 频域分析与时域分析 (11) 2.8 非线性结构反应分析 (13) 2.9 地震反应谱 (14) 2.9.1 反应谱的概念 (14) 2.9.2 反应谱的主要特征 (15) 3. 多自由度系统动力反应分析 (16) 3.1 直接积分法 (16) 3.1.1 中心差分法 (16) 3.1.2 Newmark-β法 (17) 3.1.3 Wilson-θ法 (19) 3.2 振型叠加法 (19) 3.2.1 振型分析 (19) 3.2.2 振型分解 (20) 3.2.3 振型叠加法 (21) 3.2.4 振型分解反应谱理论 (21) 4. 参考文献 (23)
1.引言 1.1 结构动力学研究的基本内容[1,2] 1.1.1结构动力学的任务 当一个结构或结构物受到随时间变化的动荷载与仅受到不随时间变化的静荷载时所表现的力学现象是不同的。一个幅值为P0的静荷载作用于结构时,可能远不致于使它产生破坏,但同样幅值的动荷载作用于同样的结构就完全有可能是结构破坏,即使不造成结构破坏,由于动载所引起的结构振动也会影响结构的正常工作。比如1985年发射的美国第一颗人造地球卫星,进入轨道后,由于悬在星体外面的四根鞭装天线的弹性振动,造成系统的内能耗散,最后导致卫星姿态失稳而翻滚。当然,结构也有它有利的一面,如采煤钻、打夯机等的工作原理就是直接利用了振动的特点。凡此种种,无一不说明结构的动力特性与静力特性是完全不一样的。然而要是结构的不受动载荷的作用是难以保证的。因此对于任一结构,无论是在设计还是在使用时,常常需要准确而迅速地预测他们的动力特性。 1.1.2结构动力学的三要素 结构动力学的三个要素是输入(激励)、系统(结构本身)和输出(响应)。 1.输入是动态的,即随时间变化的;变化规律可以是周期的、瞬态的、和随机的。输入的形式是多样的,可以是力、位移、能量等。输入可以是单点输入,也可以是多点输入。 2.系统可以使线性的,也可以是非线性的。对于线性系统,叠加原理成立,系统自由振动的频率及模态是系统所固有的,其特征不随时间改变。而非线性系统没有相对应的固有特征。系统可分为保守系统和非保守系统,有阻尼的系统,有能量的耗散,是非保守系统。在振动控制理论中,修改结构动态品质的一个行之有效的重要方法就是增加阻尼耗散系统的振动能量。 3.输出即结构系统对输入的相应。从时间的概念出发可以分为周期振动、瞬态振动和随机振动等。从空间的概念出发可以分为纵向振动、弯曲振动、扭转振动及组合振动等。输出也可以是单输出和多输出。不论什么样的结构,也不论什么样的输入,相应都将以一定形式表现出来。 在振动问题中,内容与形式是统一的。系统(结构)是引起振动的内因,结构的固有特征是结构的动态品质的决定因素,输入是外因,外因通过内因起作用,最后以输出的形式表现出来。 1.1.3结构动力学的研究范畴 在上述的三个要素中,知道其中的任何两个求第三个的问题都是结构动力学研究的范畴。 1.响应预测。已知输入和系统求输出。 2.系统辨识。已知输入和输出,确定系统的特征参数。 3.测量问题。已知系统和输出求输入。 第一个问题又称为正问题,后面两个问题称为逆问题。 1.2 结构力学研究的基本方法[1,2] 1.2.1研究步骤 在结构动力学分析中常用的研究步骤,从大的方面主要分为设计、分析、试验和再设计。本报告中主要涉及的是分析部分。这一部分的两个关键点是:1.建立方程;2.求解方程。 1.2.2建模 1.建模工作 首先引入一些假设将实际的结构进行简化,得到便于分析的形式;然后涉及一系列的参数,如引入几何尺寸、材料特征、约束边界等;最后建立一组数学方程来描述所要分析的模型。建立的方程或数学模型应能反映结构的动力学问题中的主要方面,并能较全面、客观地