微电机
2010年第43卷第12期
收稿日期:2010 09 23
基金项目:国家科技重大专项资助项目(2009ZX04010-013-05)
考虑磁路饱和的永磁同步电机弱磁调速系统仿真
李计亮1
,高 琳1
,孙慧芳1
,刘新正1
,梁得亮1
,邝俊生
2
(1 西安交通大学电气工程学院,西安 710049;2 快速制造国家工程研究中心,西安 710049)
摘 要:该文应用一种基于电压反馈的弱磁调速策略建立永磁同步电机的弱磁调速系统,并采用M a tlab/S i m uli nk 软件搭建系统仿真模型。在建模中考虑不同工况下由于磁路饱和状态不同所引起的电机参数非线性,分析磁路饱和对电机性能的影响,仿真计算考虑磁路饱和效应时电机的弱磁调速性能。通过与理论计算结果比较,验证了仿真模型的正确性。
关键词:永磁同步电机;弱磁调速;磁路饱和;参数非线性
中图分类号:TM 341;TM 351 文献标志码:A 文章编号:1001 6848(2010)12 0062 04
Sim ul a tion of F lux w eakening Cont rol Syste m of Perm anentM agnet Synchronous
M otors w it h Consider i n g M agnetic Saturati o n
LI Ji liang 1
,GAO L i n 1
,S UN H ui fang 1
,LIU X i n g zheng 1
,LIANG De li a ng 1
,KUANG Jun sheng
2
(1 School of E lectricalE ng ineering,X i an J iaotong University,X i an 710049,Ch i n a;2 Na tional Engineering R esearch C enter o f Rap id M anufacture,X i an 710049,China )
Abst ract :The fl u x w eaken i n g control syste m for per m anentm agnet synchr onousm o tor w as established using a fl u x w eakening contro l strategy based on vo ltage feedback .The corresponding si m u lation m ode lw as bu ilt a dopti n g M atlab /S i m u li n k soft w are .I n the m ode,l the non li n ear characterises o f para m eters caused by m ag netic saturati o n under different operati o ns w ere considered.Analyzed the effects o f m agnetic saturati o n on m oter perfor m ances ,the speed control perfor m ancesw ith m agne tic saturati o n under fl u x w eakening w ere si m u lated .Co m paring w ith theoretical resu lts ,the si m u lation mode lw as verified .
K ey W ords :Per m anentm agnet synchronous m otor ;F l u x w eakening contro;l M agnetic saturation;Para m e ter nonli n ear ity
0 引言
针对永磁同步电机的弱磁调速策略有许多文献进行探讨。文献[1]提出的电机数学模型分析法是根据反馈数据通过计算获得交、直轴参考电流,其在线计算量大且受电机参数变化影响较大。基于电压反馈法
[2-3]
的弱磁控制策略是根据参考电压与逆
变器电压极限的差值进行弱磁,控制性能不受电机参数变化的影响。查表法
[4-5]
根据实验获得的电机
特性曲线通过在线查表获得交直轴参考电流,这种方法的控制性能最佳,但在线计算量大。本文在综合比较各种控制策略的基础上选择性能较佳且实现简单的基于电压反馈的弱磁调速策略。
在电机从恒转矩到恒功率的整个调速过程中,
交、直轴电流的变化直接影响到气隙磁场的饱和程度,使电感参数呈现非线性。本文在采用M atlab /S i m u li n k 软件建立的电机弱磁调速仿真模型,考虑电机参数的非线性,利用仿真模型计算考虑磁场饱和时电机的弱磁调速性能。计算结果显示了模型的有效性,对构建实际的永磁同步电机调速系统具有一定的指导意义。
1 基于电压反馈的弱磁调速原理
在dq 坐标系下的永磁同步电机电压方程为:
u d =R s i d +p L d i d - e L q i q
u q =R s i q +p L q i q + e L d i d + e f
(1)
式中, e 为转子电角速度,L d 为直轴电感,L q
为交轴电感, f 为永磁体磁通。当电机高速稳态运
考虑磁路饱和的永磁同步电机弱磁调速系统仿真 李计亮,等
行时可以忽略电压方程的前两项,从而得到电压的近似方程:
u d !- e L q i q u q ! e L d i d + e
f
(2)
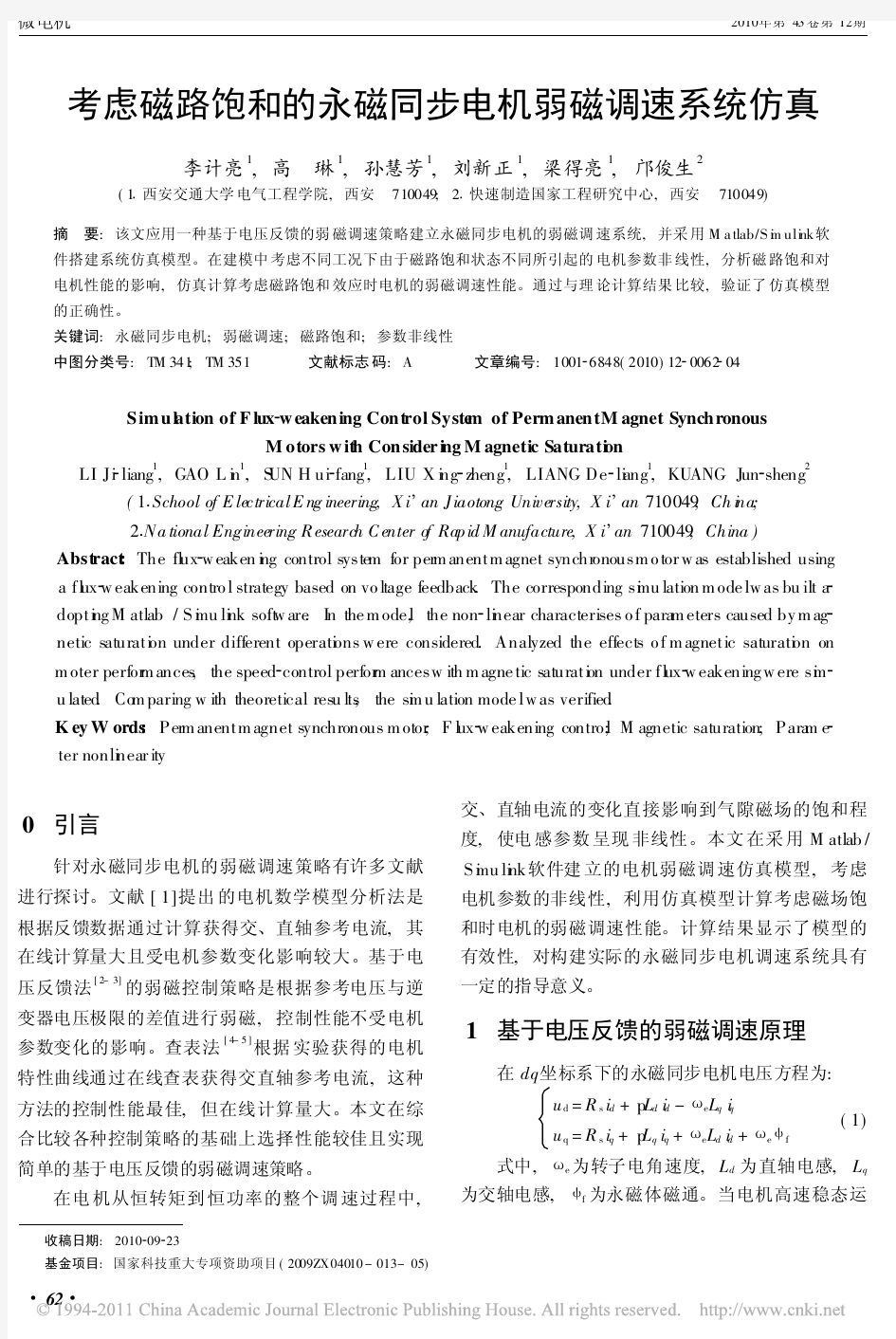
在实际控制系统中,电机由功率器件组成的逆变器驱动。由于受逆变器输出电压以及电机电流最大电流的限制,电机的电流以及端电压被限制在一定范围内变化,定子电流同时受电流极限圆和电压极限椭圆的限制,图1所示为定子电流矢量轨迹,其约束条件为
i s =
i 2d +i 2
q
(3)u s =
u 2
d
+u 2q
! e
(L q i q )+( f +L d i d )
(4)
其中I s max 、U s max 分别为电机电流和端电压允许的最大值。
定子电流空间矢量只能处于电流极限圆和电压极限椭圆交叠的区域内,即图1中的阴影部分。从式(4)可知,随着电机电角速度 e 的升高,电机端电压近似正比例增加,当升至端电压极限U s max 后,若要继续升高转速,可以通过增大直轴去磁电流分量i d 进行弱磁调速,同时相应减小交轴电流分量i q 。
图1 定子电流矢量轨迹
文献[2]根据永磁同步电机的弱磁调速原理,提出一种基于电压反馈的弱磁调速策略。当定子参考电压小于逆变器电压极限时,直轴参考电流和交轴参考电流按最大转矩电流比控制策略确定,此时电机工作于恒转矩阶段。当定子参考电压大于逆变器电压极限时,在原直轴参考电流基础上增加一个去磁电流分量,同时相应减小交轴参考电流,电机进入弱磁调速阶段。
基于电压反馈的弱磁调速策略需要构建包括速度环、电流环、电压环在内的三闭环控制系统。速度环为控制外环,保证电机实际转速与参考转速值相一致,并能及时消除负载转矩扰动对转速的影响。电流环通过控制逆变器输出电压保证交轴和直轴电
流分量的准确跟踪。电压环是实现弱磁调速的关键,当电流控制模块输出的定子参考电压超过U s max 后,通过在直轴参考电流上增加一个去磁电流分量来减弱电机的气隙磁场,从而达到弱磁调速的目的。
2 弱磁调速控制系统建模
根据电压反馈的弱磁调速控制策略构建的永磁同步电机弱磁调速系统仿真框图如图2所示,控制系统由转速控制模块、弱磁控制模块、电流控制模块、SVP WM 模块、反馈信号输出模块以及永磁同步电机组成。建模采用M atlab /S i m u li n k 软件进行
,利用S i m uli n k 库模块首先分别搭建转速控制模块等各个子模块,然后进行子模块封装,最后根据图2所示的仿真框图组成完整的控制系统仿真模型。
图2 永磁同步电机弱磁调速系统仿真框图
转速控制模块的搭建如图3所示,参考转速和实际转速的差值为输入项,通过输出受限(-I s m
ax 和I s m ax 之间)的PI 控制器计算定子电流参考值。由于在弱磁调速过程中转速的调整过程时间较长,积分项容易饱和,因此在模块中增加了积分抗饱和功能。
图3 转速控制模块
弱磁控制模块的实现如图4所示,根据参考电压u s ref 的大小判断电机的运行区域,采取相应的电机控制策略。当u sref
i d ref =
f - f 2
+8?(L q -L d )
2
?i s ref 2
4?(L q -L d )(5)i q ref =i s ref 2
-i
d ref 2
i s r ef >0i q ref =-i s ref 2
-i d ref
2
i s r ef <0
(6)
当u s ref >U s max 时电机进入弱磁调速区域,此时采用基于电压反馈的弱磁调速控制策略,在式(5)所
微电机
2010年第43卷第12期
示直轴参考电流基础上增加一个直轴去磁电流分量i d fw ,其具体数值通过输入为u s ref 和U s max 差值的积分控制器计算获得,
同时交轴参考电流做相应调整。
图4 弱磁控制模块
由dq 坐标系下永磁同步电机的数学模型可知,直轴电压分量u d 的变化不仅会影响直轴电流i d 还会影响交轴电流i q ,同理交轴电压分量的变化也同时影响交、直轴电流的大小,即电机的交轴和直轴间存在耦合。为了对电流进行解耦控制,设置两个中间变量u d 2和u q 2,其数学表达式分别为:
u d 2=R s i d +pL d i d u q 2=R s i q +pL q i q
(7)
由式(7)可知,通过分别控制u d 2和u q 2可以达到对i d 和i q 的解耦控制。引入中间变量u d 2和u q 2后dq 坐标系下的电压方程变为:
u d =u d 2- e L q i q
u q =u q 2+ e L d i d + e f
(8)
根据以上理论分析搭建的电流控制模块如图5所示,包含电流的PI 调节和电流的解耦控制两部分,前者通过PI 控制器输出u d 2r ef 和u q 2ref ,后者根据式(8)计算交、直轴电压参考值。
图5 电流控制模块
3 考虑磁路饱和效应的仿真模型
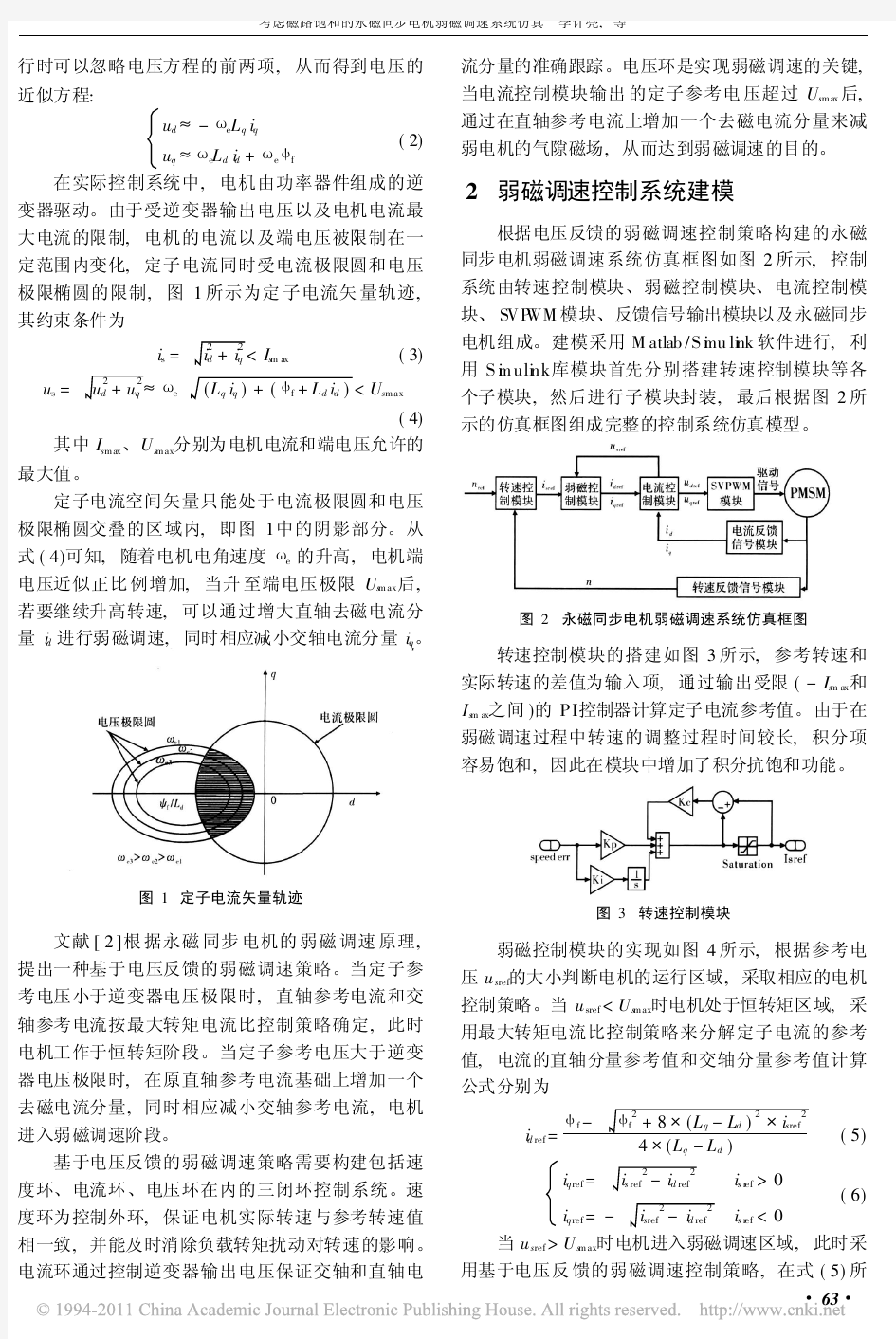
在永磁同步电机从恒转矩运行到恒功率运行的整个过程中,定子电流的交、直流分量需要不断地动态调整,交、直轴磁路的饱和程度随之不断发生变化,导致电机的交、直轴电感参数呈现与电流的非线性关系。要准确地计算电机的调速性能就需要在仿真模型中考虑电机参数的非线性。表1是一台内置式永磁同步电动机的主要设计数据,采用ANSOFT 计算得到的电机交直轴电感L q 、L d 随交、直轴电流的变化曲线如图6所示。由图6可知当i d 为直轴增磁电流时,随着i d 的增加磁路的饱和程度增加,因此直轴电感L d 随之减小。但是当i d 为直轴去磁电流时L d 却基本保持不变,这是因为由于永磁体励磁磁通的存在,即使在弱磁调速阶段气隙磁场始终处于饱和状态,因此L d 变化不大。而交轴磁场是由交轴电流分量独立激励,因此只要交轴电流增大,交轴磁场的饱和程度就会增加,从而
使L q 显著减小。对有限元计算的样本点进行数据拟合,得到电感参数的计算公式:
L d =3 6985e -3
-3 367e -5
i d -6 487e -7i 2
d
L q =8 987e -3
-2 35e -5i 2
q +3 922e -8i 4
d -2 386
e -11i 6
q
(9)
表1 内置式永磁同步电动机主要设计数据额定功率/k W 3 1
额定电压/V
190额定电流/A
11 93额定转速/r m i n -1
2000极对数6定子槽数36定子外径/mm 174定子内径/mm 104定子电阻/ 0 253气隙/mm 0 7永磁体尺寸/mm 2
5?40
永磁体材料
N 33UH
图6 L q 、L d 随交、直轴电流的变化曲线
在电机模块中将电感参数L q 、L d 设置为全局变量,根据调速过程中每次迭代结束后的i d 和i q ,采用式(9)计算交、直轴电感,这样就可以在仿真中
考虑磁路饱和的永磁同步电机弱磁调速系统仿真 李计亮,等
考虑电机参数的非线性。
4 弱磁调速性能的仿真计算
为了验证本文建立的永磁同步电机弱磁调速仿真模型的正确性,分别采用理论公式估算和仿真模型计算电机弱磁调速的稳态性能,并进行比较。计算时考虑了磁路饱和和磁路不饱和两种情况。磁路饱和引起的电感参数变化采用式(9)的拟合公式,不考虑磁路饱和效应时采用额定工况下电感参数。图7所示为采用理论公式和仿真模型计算得到的两种情况下电机恒功率运行时,对应每一电磁功率通过弱磁扩速所能获得的最高转速。可见采用理论公式估算和仿真模型计算得到的电机稳态调速性能基本吻合,验证了仿真模型的正确性。
从图7中可以看出,磁路饱和效应对稳态调速性能的影响不是非常显著,其原因可以从理论公式上说明。电机的电磁转矩计算公式为
T e=1 5p n[ f i q+(L d-L q)i d i q](10)随着磁路饱和程度的增加,L q减小,导致电机的凸极率下降,电磁转矩减小。但同时由电角速度公式
e!U s m ax
(L q i q)2+( f+L d i d)2
(11)
可知L q的减小会导致一定电流下电机转速的上升。因此电磁功率变化不大。
图7 理论公式估算与仿真模型计算结果比较
图8
是采用仿真模型计算的考虑磁路饱和的电机弱磁调速动态性能。仿真时电机带额定负载起动,起动后进入恒功率弱磁调速阶段。由图8可以看出,电机恒功率运行可以达到的最高转速在3200r/m i n 附近,弱磁扩速能力为1 5倍。
图8 考虑磁路饱和的电机弱磁调速性能仿真计算
5 结 论
本文采用MATLAB/SI M ULI N K软件建立了永磁同步电机弱磁调速仿真模型,采用一种基于电压反馈的弱磁调速策略,并在仿真模型中考虑了由于磁路饱和引起的的电感参数非线性。通过对比理论公式估算与仿真模型计算的电机稳态调速性能,验证了仿真模型的正确性。仿真结果表明,基于电压反馈的弱磁调速系统可以有效地拓宽电机的恒功率运
(下转第77页)
基于DSP的永磁同步电机矢量控制系统设计与实现 丁 文,
等
图15 全闭环控制稳态电角度和
相电流波形(n=450r/m i n)
4 结 论
本文设计的基于DSP的P M S M磁场定向控制系统具有电路简单、控制精度高和可靠性好等特点。P M S M动态和稳态实验结果表明,本文采用的控制策略使电机在起动、空载和负载下能够稳定运行,证明了P M S M矢量控制系统良好的控制性能。
参考文献
[1] 李志民.同步电动机调速系统[M].北京:机械工业出版
社,1996.
[2] 李崇坚.交流同步电机调速系统[M].北京:科学出版
社,2006.[3] 苏奎峰.T M S320F2812原理与开发[M].北京:电子工业出版
社,2005.
[4] S i ngh B,S i ngh BP,Dw i ved i S.DSP based i m p le m en tati on of S li d
i ngM ode Sp eed Con troller f or V ector C ontroll ed Per m anen tM agn et
S ynch ronou sM otor d ri ve[C].I EEE Po w er E lectron ics C onferen ce,
2006:22-27.
[5] L i SH,L i u ZG.Adap ti ve Speed C on trol f or Per m anen t M agnet Syn
chronous M ot or Syste m W i th Vari ati ons of Load I n ertia[J].I EEE
Transacti ons on I ndu stri al E l ectron i cs,2009,56(8):3050
-3059.
[6] L i n H,Yan W S.M odel reference adapti ve backstepp i ng based d irect
torque con trol of P M synch ronou s m otor dri ves[C].I EEE Industrial
E lectron ics and Appli cati ons C onferen ce,2009:1173-1178.
[7] 陈荣.永磁同步电机伺服系统研究[D].南京:南京航空航天大
学,2004.
[8] 肖卫文,熊芝耀,李世春.基于变参数P I的永磁同步电动机矢
量控制系统[J].电力电子技术,2009,43(4):32-33.
[9] 杨贵杰,孙力,崔乃政.空间矢量脉宽调制方法的研究[J].中
国电机工程学报,2001,21(5):79-83.
[10] 赵荣,罗耀华.采用SVP WM的永磁同步电机伺服系统建模与
仿真[J].应用科技,2008,35(10):49-52.
作者简介:丁 文(1981-),讲师,从事电机及其控制技术研究。
梁得亮(1967-),教授,博导,从事电机及其控制技术研究。
(上接第65页)
行范围,而且转速响应迅速,系统具有良好的动态性能。在弱磁调速区域磁场饱和导致交轴电感明显增大,而由于永磁磁势的存在使直轴磁路一直处于饱和状态,因此在弱磁区域直轴电感变化不大。理论分析与仿真计算均表明,在弱磁阶段磁路饱和使电磁转矩略微增大,最高转速略微减小,系统稳态性能基本保持不变。
参考文献
[1] S.M ori m ot o,M.San ada,Y.Tak eda.W i de speed op erati on of i n
terior per m an ent m agnet syn c h ronous m ot ors w it h h i gh perfor m ance
curren t regu l ator[J].IEEE T ransacti on s on Indu stri alApp licati ons,
1994,30(4):920-926.
[2] N i cola B ianch,i S il verio B ol ognan i,M auro Zigli otto.H i gh Perf or m
ance P M Synchronous M ot or D ri ve for an E lectri cal Scooter[J].
IEEE Transactions on Industry App licati ons,2001,37(5):1348
-1354
[3] R.U.Lenke,R.W. D.Don cker,M.S.Kw ak,et a.l Fiel d
w eak en i ng contro l of i nteri or per m an ent m agnet m ach i n e u si ng i m
proved cu rrent i n terpo l ation techn i que[J].IEEE PESC,2006(6):
1-5.
[4] D.S.M ari c,S.H it,i C.C.S t ancu,et a.l Tw o fl ux w eakening
sche m es f or Su rf ace moun ted p er m anen t m agnet synch ronou s dri ves
[J].desi gn and tran sientres.
[5] A.K.Adnanes,W.Su l k o w s k,i L.A.Aga,et a.l A f u ll y d i gital
per manent m agnet s ynchronous m ot or d ri ve w i th fl ux w eakening
[C].I EE Proc.E l ectricalM ach i nes and Dri ves,1991(9):227-
231.
作者简介:李计亮(1983-),男,硕士研究生,从事永磁电机驱动与控制方法研究。
永磁同步电机弱磁调速控制文献阅读报告 专业:电气工程及其自动化 学生: 学生学号: 学生班号:
本篇论文是从阅读文献报告的角度来解读论文的。 稀土永磁同步电机早在上世纪七十年代就开始出现,现在已被广泛使用,其具有重量轻、体积小、效率高、弱磁扩速能力强等一系列优点,成为航空、航天、武器装备、电动汽车等领域重要发展方向。由于永磁同步电机磁场结构复杂,使得计算准确度差,磁极形状与尺寸的优化,调速性能等都是永磁电机设计的难点。这些年来,如何提高永磁同步电机恒功率调速比的问题是研究的重点,永磁电机及其驱动器的设计成了电机领域研究的热点课题。 本文主要研究容是对置式永磁同步电机设计及弱磁性能的研究。 分析永磁同步电机(PMSM)数学模型的基础上,通过阐述弱磁调速的控制原理,提出了一种基于电流调节的PMSM定子磁链弱磁控制算法,有效地拓宽了恒功率调速比。并在Matlab/Simulink环境下,构建了永磁同步电机弱磁控制系统的速度和电流双闭环仿真模型。仿真结果证明了该控制系统模型的有效性,恒功率调速比达到了4: 1,为永磁同步电机弱磁调速控制系统的设计和调试提供了理论基础,有一定的实际工程价值。 关键词:置式;永磁电机;弱磁控制;电流跟踪算法;仿真建模
目录 永磁同步电机弱磁调速控制文献阅读报告 (1) 一、研究的问题 (4) 二、研究方法 (5) 2.1 永磁电机的数学模型 (5) 2.2弱磁调速原理 (6) 2.3 基于Matlab的PMSM弱磁控制系统仿真模型建立 (7) 2.4 仿真结果 (11) 三、解决效果 (12) 3.1 结论 (12) 3.2感悟与体会 (12)
基于SVPWM的永磁同步电机控制系统的仿真 随着电动机在社会生产中的广泛应用,由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低,易于散热及维护等优点,特别是随着永磁材料价格的下降、材料的磁性能的提高、以及新型的永磁材料的出现,在中小功率、高精度、高可靠性、宽调速围的伺服控制系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广,尤其在航空航天、数控机床、加工中心、机器人等场合已获得广泛的应用。我国制作永磁电机永磁材料的稀土资源丰富,稀土资占全世界的80%以上,发展永磁电机具有广阔的前景。 第一章永磁同步电机的矢量控制原理 1.1 永磁同步电机控制中应用的坐标系 交流电机的数学模型具有高阶次,多变量耦合,非线性等特征,难以直接应用于系统的设计和控制,与直流电机单变量,自然解耦和线性的数学模型相比较,交流电机显得异常复杂。因此需要通过适当的转换,将交流电机的控制变换为类似直流电机的控制将大大简化交流电机控制的复杂程度。 永磁同步电机矢量控制的基本思想是把交流电机当成直流电机来控制,即模拟直流电机的控制特点进行永磁同步电机的控制。为简化感应电机模型,可将电机三相绕组电流产生的磁动势按平面矢量的叠加原理进行合成和分解,使得能够用两相正交绕组来等效实际电动机的三相绕组。由于两相绕组的正交性,变量之间的耦合大大减小。 1.1.1系统中的坐标系 1)三相定子坐标系(U-V-W坐标系) 其中三相交流电机绕组轴线分别为U、V、W,彼此之间互差120度空间电角度,构成了一个U-V-W三相坐标系。空间任意一矢量在三个坐标上的投
影代表了该矢量在三个绕组上的分量。 2)两相定子坐标系(α-β坐标系) 两相对称绕组通以两相对称电流也能产生旋转磁场。对于空间的任意一矢量,数学描述时习惯采用两相直角坐标系来描述,所以定义一个两相静止坐标系,即α-β坐标系。它的轴α和三相定子坐标系的A轴重合,β轴逆时针超前α轴90度空间电角度。由于α轴固定在定子A相绕组轴线上,所以α-β坐标系也是静止坐标系。 3)转子坐标系(d-q坐标系) 转子坐标系d轴位于转子磁链轴线上,q轴逆时针超前d轴90度空间电角度,该坐标系和转子一起在空间上以转子角速度旋转,故为旋转坐标系。对于同步电动机,d轴是转子磁极的轴线。 矢量控制中用到的变换有:将三相平面坐标系向两相平面直角坐标系的转换(Clarke 变换)和将两相静止直角坐标系向两相旋转直角坐标系的变换(Park变换)。 1.1.2 由三项平面坐标系向两相平面坐标系(Clarke变换) 三相同步电动机的集中绕组U、V、W的轴线在与转子垂直的平面分布如上图所示,轴线依次相差120°,可将每相绕组在气隙中产生的磁势分别记为:Fu、Fv、Fw。由于Fu、Fv、Fw不会在轴向上产生分量,所以可以把气隙的磁场简化为一个二维的平面场。简单起见,可以U为α轴,由α起逆时针旋转90°作β轴,建立起二维坐标系,用此两相坐标系(α-β)产生的磁动势来等效三相静止坐标系(U-V-W)产生的磁动势。如图1.1所示。
1.课题背景及意义 1.1课题研究背景、目的及意义 近年来,随着电力电子技术、微电子技术、微型计算机技术、传感器技术、稀土永磁材料与电动机控制理论的发展,交流伺服控制技术有了长足的进步,交流伺服系统将逐步取代直流伺服系统,借助于计算机技术、现代控制理论的发展,人们可以构成高精度、快速响应的交流伺服驱动系统。因此,近年来,世界各国在高精度速度和位置控制场合,己经由交流电力传动取代液压和直流传动[1][2]。 二十世纪八十年代以来,随着价格低廉的钕铁硼(REFEB)永磁材料的出现,使永磁同步电机得到了很大的发展,世界各国(以德国和日本为首)掀起了一股研制和生产永磁同步电机及其伺服控制器的热潮,在数控机床、工业机器人等小功率应用场合,永磁同步电机伺服系统是主要的发展趋势。永磁同步电机的控制技术将逐渐走向成熟并日趋完善[3]。以往同步电机的概念和应用范围己被当今的永磁同步电机大大扩展。可以毫不夸张地说,永磁同步电机已在从小到大,从一般控制驱动到高精度的伺服驱动,从人们日常生活到各种高精尖的科技领域作为最主要的驱动电机出现,而且前景会越来越明显。 由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低,易于散热及维护等优点,特别是随着永磁材料价格的下降、材料的磁性能的提高、以及新型的永磁材料的出现,在中小功率、高精度、高可靠性、宽调速范围的伺服控制系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广,尤其在航空航天、数控机床、加工中心、机器人等场合获得广泛的应用[4][5]。 尽管永磁同步电动机的控制技术得到了很大的发展,各种控制技术的应用 - 1 -
永磁同步电机弱磁控制的控制策略研究 摘要 永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。基于它的优越性,永磁同步电机获得了广泛的研究和应用。本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。 关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机 一、永磁同步电机弱磁控制研究现状 1.永磁同步电机及其控制技术的发展 任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。因此,交流电机的转矩控制性能不佳。经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。 1.1 矢量控制 1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统。矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能。 1.2 恒压频比控制 恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。但是它依据电机的稳态模型,从而得不到理想的动态控制性能。要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。近年来,研究了各种非线性控制器,来解决永磁同步电机非线性的特性。 1.3 直接转矩控制 矢量控制方案是一种很有效的交流伺服电机控制方案,但是由于该方案需要进行矢量旋转变换,坐标变换比较复杂。此外,由于电机的机械常数慢于电磁常数,矢量控制中转矩响应的速度不够迅速。针对矢量控制的上述缺点,德国学者
永磁同步电机弱磁调速控制文献阅读报告
专业:电气工程及其自动化 学生姓名: 学生学号: 学生班号:
本篇论文是从阅读文献报告的角度来解读论文的。 稀土永磁同步电机早在上世纪七十年代就开始出现,现在已被广泛使用,其具有重量轻、体积小、效率高、弱磁扩速能力强等一系列优点,成为航空、航天、武器装备、电动汽车等领域重要发展方向。由于永磁同步电机磁场结构复杂,使得计算准确度差,磁极形状与尺寸的优化,调速性能等都是永磁电机设计的难点。这些年来,如何提高永磁同步电机恒功率调速比的问题是研究的重点,永磁电机及其驱动器的设计成了电机领域研究的热点课题。 本文主要研究内容是对内置式永磁同步电机设计及弱磁性能的研究。 分析永磁同步电机(PMSM)数学模型的基础上,通过阐述弱磁调速的控制原理,提出了一种基于电流调节的PMSM定子磁链弱磁控制算法,有效地拓宽了恒功率调速比。并在Matlab/Simulink环境下,构建了永磁同步电机弱磁控制系统的速度和电流双闭环仿真模型。仿真结果证明了该控制系统模型的有效性,恒功率调速比达到了4: 1,为永磁同步电机弱磁调速控制系统的设计和调试提供了理论基础,有一定的实际工程价值。 关键词:内置式;永磁电机;弱磁控制;电流跟踪算法;仿真建模
目录 永磁同步电机弱磁调速控制文献阅读报告 (1) 一、研究的问题 (5) 二、研究方法 (5) 2.1 永磁电机的数学模型 (5) 2.2弱磁调速原理 (7) 2.3 基于Matlab的PMSM弱磁控制系统仿真模型建立 (8) 2.4 仿真结果 (11) 三、解决效果 (13) 3.1 结论 (13) 3.2感悟与体会 (13)
永磁同步电机控制系统仿真模型的建立与 实现
电机的控制 本文设计的电机效率特性如图 转矩(Nm) 转速(rpm) 异步电机效率特性 PMSM 电机效率特性 本文设计的电动汽车电机采用SVPWM 控制技术是一种先进的控制技术,它是以“磁链跟踪控制”为目标,能明显减少逆变器输出电流的谐波成份及电机的谐波损耗,能有效降低脉动转矩,适用于各种交流电动机调速,有替代传统SPWM 的趋势[2]。 基于上述原因,本文结合0=d i 和SVPWM 控制技术设计PMSM 双闭环PI 调速控制。其中,内环为电流环[3],外环为速度环,根据经典的PID 控制设计理论,将内环按典型Ⅰ系统,外环按典型Ⅱ系统设计PI 控制器参数[4]。 1. PMSM 控制系统总模型 首先给出PMSM 的交流伺服系统矢量控制框图。忽略粘性阻尼系数的影响, PMSM 的状态方程可表示为 ??????????-+????????????????????----=??????????J T L u L u i i P J P L R P P L R i i L q d m q d f n f n m n m n m q d ///002/30//ωψψωωω& && (1) 将0=d i 带入上式,有 ???? ??????-+??????????? ??? ??--=????? ?????J T L u L u i J P P L R P i i L q d m q f n f n m n m q d ///02/3/0ωψψωω& && (2) 转 矩 (N m )转速 (n /(m i n )) 效率 转速 (rpm) 转矩 (N m )
题目1:永磁同步电机双闭环矢量控制系统仿真 一.实验目的 1.加深理解永磁同步电机矢量控制系统的工作原理 2.掌握永磁同步电机驱动系统仿真分析方法 二.实验要求: 1.永磁同步电机双闭环控制系统建模 2.电流控制器设计 3.电流环动态跟随性能仿真实验 4.转速控制器设计 5.转速环抗负载扰动性能仿真实验 6.给出仿真实验结果与理论分析结果的对比及结论 三.预习内容 注:以下所有找不到的器件均可以通过搜索框搜索 Simulink的启动在MATLAB中键入>>Simulink,进入Simulink library,2014版本的可直接点击MATLAB界面上的Simulink library,在Simulink界面上选择File->New->Model。如图1所示: 图1 Simulink界面 在Simulink一级标题下点击source将step(阶跃函数)拖入空白文件作为
转速给定,也可用两个ramp函数相减,使转速缓慢达到预定转速,如图2: 图2 转速给定 在Simulink一级标题下点击Ports & Subsystems 选择Subsystem放入空白文件并双击,删除In1和Out1的连线,如图3: 图3 子函数模块 选择Simulink>Continuous下的integrator、Simulink>discontinuous下的Saturation、Simulink>math operation下的gain和Add,连好线后保存并返回,作为PI调节器,其中saturation可设置上下限为100和-100,如图4:
图4 PI子函数模块设置 此PI调节器输出结果作为Iq的电流给定,同样方法得到一个PI调节器,输出结果作为电压给定,并设置saturation上下限为380和-380,Simulink下math operation选择sum双击并修改第二个“+”为“-”,如图5: 图5 转速和电流反馈PI调节 选择Simulink>Ports & Subsystems下的Subsystem 拖入并双击进入子系统,并添加2个In1和1个Out1如图6: 图6 接口模块 Simulink>math operation 下选择 Trigonometric Function、Product、Subtract、Add加入文件,设置好后保存并退出,作为逆Park变换,如图7:
基于MTPA的永磁同步电动机矢量控制系统 1 引言 永磁同步电动机由于自身结构的优点,再加上近年来永磁材料的发展,以及电力电子技术和控制技术的发展,永磁同步电动机的应用越来越广泛。而对于凸极式永磁同步电动机,由于具有更高的功率密度和更好的动态性能,在实际应用中越来越受到人们的重视[1]。 高性能的永磁同步电动机控制系统主要采用的矢量控制。交流电机的矢量控制由德国学者blaschke在1971年提出,从而在理论上解决了交流电动机转矩的高性能控制问题。该控制方法首先应用在感应电机上,但很快被移植到同步电机。事实上,在永磁同步电动机上更容易实现矢量控制。因为该类电机在矢量控制过程中不存在感应电机中的转差频率电流而且控制受参数(主要是转子参数)的影响也小。 永磁同步电动机的矢量控制从本质上讲,就是对定子电流在转子旋转坐标系(dq0坐标系)中的两个分量的控制。因为电机电磁转矩的大小取决于上述的两个定子电流分量。对于给定的输出转矩,可以有多个不同的d、q轴电流的控制组合。不同的组合将影响系统的效率、功率因数、电机端电压以及转矩输出能力,由此形成了各种永磁同步电动机的电流控制方法。[2]针对凸极式永磁同步
电动机的特点,本文采用最优转矩控制(mtpa),并用一种更符合实际应用的方法进行实现,并进行了仿真验证。
图1 电流id、iq和转矩te关系曲线 2 永磁同步电动机的数学模型 首先,需要建立永磁同步电动机在转子旋转dq0坐标系下的数学模型,这种模型不仅可用于分析电机的稳态运行性能,还可以用于分析电机的暂态性能。 为建立永磁同步电机的dq0轴系数学模型,首先假设: (1)忽略电动机铁芯的饱和; (2)不计电动机中的涡流和磁滞损耗; (3)转子上没有阻尼绕组; (4)电动机的反电动势是正弦的。 这样,就得到永磁同步电动机dq0轴系下数学模型的电压、磁链和电磁转矩方程,分别如下所示:
第1章绪论 1.1 课题研究的背景 1.1.1 永磁同步电机的发展状况 永磁同步电机出现于20 世纪50 年代。其运行原理与普通电激磁同步电机相同,但它以永磁体替代激磁绕组,使电机结构更为简单,提高了电机运行的可靠性。随着电力电子技术和微型计算机的发展,20 世纪70 年代,永磁同步电机开始应用于交流变频调速系统。20 世纪80 年代,稀土永磁材料的研制取得了突破性的进展,特别是剩磁高、矫顽力大而价格低廉的第三代新型永磁材料钕铁硼(NdFeB)的出现,极大地促进了永磁同步电机调速系统的发展。尤其值得一提的是我国是一个稀土材料的大国,稀土储量和稀土金属的提炼都居世界首位。随着稀土材料技术的不断发展,永磁材料的磁能积已经做的很高,价格也早就满足工业应用的需要,加上矢量控制水平的不断提高,永磁同步电动机越来越显出效率高、功率密度大、调速范围宽、脉动转矩小等高性能的优势。使我国在稀土永磁材料和稀土永磁电机的科研水平都达到了国际先进水平。新型永磁材料在电机上的应用,不仅促进了电机结构、设计方法、制造工艺等方面的改革,而且使永磁同步电机的性能有了质的飞跃,稀土永磁同步电机正向大功率(超高速、大转矩)微型化、智能化、高性能化的方向发展,成为交流调速领域的一个重要分支[1][2]。 由于受到功率开关元件、永磁材料和驱动控制技术发展水平的制约,永磁同步电机最初都采用矩形波波形,在原理和控制方式上基本上与直流电机类似,但这种电机的转矩存在较大的波动。为了克服这一缺点,人们在此基础上又研制出带有位置传感器、逆变器驱动的正弦波永磁同步电机,这就使得永磁同步电机有了更广阔的前景。 1.1.2 永磁同步电机控制系统的发展 随着永磁同步电动机的控制技术的不断发展,各种控制技术的应用也在逐步成熟,比如SVPWM、DTC、SVM-DTC、MRAS等方法都在实际中得到应用。然而,在实际应用中,各种控制策略都存在着一定的不足,如低速特性不够理
电动汽车用永磁同步电机直接 转矩弱磁控制 许峻峰1 冯江华2 许建平1 1.西南交通大学 2.株洲电力机车研究所 摘要:通过对电流限定轨迹、转速限定轨迹和负载角限定轨迹的介绍,阐述了电动汽车用埋入式永磁同步电机的弱磁控制过程,有效拓宽了永磁同步电机直接转矩控制系统的调速范围。由于永磁同步电机弱磁是通过电枢反应达到弱磁运行目的的,电枢反应对永磁同步电机的参数有着重要的影响,并且弱磁程度越高,电枢反应越大。因此考虑了永磁同步电机的电枢反应对于电机转子磁链和交直轴电感等参数的影响,对比了不考虑电枢反应时各控制轨迹及弱磁性能。通过M AT LAB/SIM ULINK实现了考虑电枢反应和不考虑电枢的永磁同步电机直接转矩控制的弱磁控制。仿真结果验证了理论分析的正确性。 关键词:电动汽车 永磁同步电机 直接转矩 弱磁控制 Flux-weakening C ontrol of Direct Torque C ontrol of Permanent Magnet Synchronous Motor for Electrical Vehicle Xu Junfeng Feng Jiang hua Xu Jianping Abstract:Flux-w eakening control of interior permanen t magnet s ynchr on ou s motor(PM SM)is elaborated by th e pres entation of current limit trajectory,speed limit trajectory and load angel limit tr ajectory.Flux-w eaken ing control extends th e timin g range of the mach ine.For PM SM,flux-w eakening is realized by armatur e reaction.In flux-w eak enin g range,ar mature reaction w ill serious ly affect th e parameters of PM S M s uch as rotor flux,direct ax is inductance and quadrature axis ind uctan ce.T he control trajectories mention ed above and flux-w eakening contr ol performance of w ith and w ithout cons idering arm ature reaction are compared us ing M AT LAB/SIM U LINK.T he ration ality of theory analysis h as b een proved b y s imulation r esu lts. Keywords:electrical vehicle perman ent magnet synchronous motor(PM S M) direct torqu e control flux-w eakening control 1 引言 电动汽车对于驱动系统的基本要求是:低速时能输出恒定转矩,以适应快速起动、加速、负荷爬坡等要求,高速时能输出恒定功率,能有较宽的调速范围,适应高速行驶,超车等要求。较强的弱磁性能能够在逆变器容量不变的情况下提高电动汽车的起动、加速能力及低速爬坡能力;或者说在保持电动汽车起动加速及低速爬坡能力不变的前提下降低电机的最大功率,从而降低逆变器的容量。因此对电动汽车驱动用永磁同步电动机进行弱磁控制,并且拓宽弱磁范围有着重要的意义。另外对永磁同步电动机进行弱磁控制可以拓宽电动汽车的运行范围,满足电动汽车高速运行的要求。 因为永磁同步电机的转子励磁磁场由永磁体产生,不能像异步电机一样直接减弱转子磁场,所以弱磁控制便成了永磁同步电机的研究热点。其弱磁控制原理是通过增加定子直轴电流利用直轴电枢反应使电机气隙磁场减弱,达到等效于减弱磁场的效果,从而达到弱磁增速的目的。针对这一 国家自然科学基金项目(50077018),国家教育部博士学科点专项科研基金项目(20020613010)
永磁同步电机弱磁控制方法 摘要:永磁同步电机(Permanent magnet synchronous machine,PMSM)由于其高功率密度、高可靠性和高效率等特点,在电动汽车等要求较高的调速驱动系统中得到了广泛的应用。永磁同步电机必须采用弱磁控制技术以满足宽转速范围的调速需求,对其进行弱磁控制并拓宽调速范围有着重要意义。本文针对现在常用的几种永磁同步电机弱磁控制方法进行综述。基于控制对象的不同,对弱磁控制方法进行分类,并详细介绍了目前比较常见的负id 补偿法、查表法、梯度下降法、电流角度法、单电流调节器法等方法,分析了各方法的原理及特点,得出以电压为控制对象的弱磁方法具有一定发展前景的结论。 关键词:永磁同步电机;弱磁控制;内置式永磁同步电机;矢量控制 The Field Weakening Control Strategy of Permanent Magnet Synchronous Motor Abstract: PMSM because of its high power density, high reliability and high efficiency characteristics, at a higher speed requirements of electric vehicle drive system has been widely used. PMSM weakening control technology must be used to meet the needs of a wide speed range . And because of its salient pole effect, it is of great significance to broaden the scope of the weak magnetic field of IPMSM. In this paper, the commonly used weakening control method of PMSM are reviewed.Based on the different control object,we classify the weak magnetic control method, and introduces in detail the negative id compensation method, look-up table method, gradient descent method, current angle method, single current regulator method that is used commonly at present, analyzes the principle and characteristics of each method.Finally, we conclude that voltage control field weeking method has development prospects . Key words: PMSM; the field weaking control; IPMSM;FOC 1引言 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于其高功率密度、高可靠性和高效率等特点,在电动汽车等要求较高的调速驱动系统中得到了广泛的应用[1, 2]。永磁同步电机必须采用弱磁控制技术以满足宽转速范围的调速需求。永磁同步电机弱磁控制的思想来自对他励直流电机的调磁控制,对永磁同步电机弱磁控制的研究始于20 世纪80 年代中期[3, 4]。并于90 年代初形成了完善的弱磁理论[5]。内置式永磁电机结构简单、鲁棒性高、造价低。对内置式永磁电机进行弱磁控制并拓宽弱磁范围有着重要意义[6]。由于永磁同步电机的励磁磁场是由永磁体产生,在转速要求较高需要弱磁运行的场合难以实现,在某些应用场合受到限制。因而研究永磁电机的弱磁扩速问题,无论是从控制角度还是本体结构的合理设计选取的角度,一直是国内外学者研究解决的热点[7]。所以有必要对现有的永磁同步电机弱磁控制方式进行综合分析研究。本文将针对现在常用的几种永磁同步电机弱磁控制方法进行综述。文中基于控制对象的不同,对弱磁控制方法进行分类,并详细介绍了目前比较常见的负i d补偿法、查表法、梯度下降法、电流角度法、单电流调节器法等方法。 2 永磁同步电机弱磁控制研究现状 2.1永磁同步电机控制技术的研究现状 近二十年多年来电动机矢量控制、直接转矩控制等控制技术的问世和计算机人工智能技术的进步,使得电动机的控制理论和实际控制技术上升到了一个新的高度。目前,永磁同步电机调速传动系统仍以采用矢量控制的为多。 矢量控制实际上是对电动机定子电流矢量相位和幅值的控制。从式(1)可以看出,当永磁体的励
关于1.5KW永磁同步电机控制器的初步方案 基于永磁同步电机自身的结构特点,要实现对转速及位置的伺服控制,采用矢量控制算法结合SVPWM技术实现对电机的精确控制,通过改变电机定子电压频率即可实现调速,为防止失步,采用自控方式,利用转子位置检测信号控制逆变器输出电流频率,同时转子位置检测信号作为同步电机的启动以及实现位置伺服功能的组成部分。 矢量控制的基本思想是在三相永磁同步电动机上设法模拟直流 电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分量分解成产生磁通的励磁电流分量id和产生转矩的转矩电流iq分量,并使两分量互相垂直,彼此独立。当给定Id=0,这时根据电机的转矩公式可以得到转矩与主磁通和iq乘积成正比。由于给定Id=0,那么主磁通就基本恒定,这样只要调节电流转矩分量iq就可以像控制直流电动机一样控制永磁同步电机。 根据这一思想,初步设想系统的主要组成部分为:主控制板部分,电源及驱动板部分,输入输出部分。 其中主控制板部分即DSP板,根据控制指令和位置速度传感器以及采集的电压电流信号进行运算,并输出用于控制逆变器部分的控制信号。 电源和驱动板部分主要负责给各个部分供电,并提供给逆变器部分相应的驱动信号,以及将控制信号与主回路的高压部分隔离开。 输入输出部分用来输入控制量,显示实时信息等。
原理框图如下: 基本控制过程:速度给定信号与检测到的转子信号相比较,经过速度控制器的调节,产生定子电流转矩分量Isq_ref,用这个电流量作为电流控制器的给定信号。励磁分量Isd_ref由外部给定,当励磁分量为零时,从电机端口看,永磁同步电机相当于一台他励直流电机,磁通基本恒定,简化了控制问题。另一端通过电流采样得到三相定子电流,经过Clarke变换将其变为α-β两相静止坐标系下的电流,再通过park 变换将其变为d-q两相旋转坐标系下电流Isq,Isd,分别与两个调节器的参考值比较,经过控制器调节后变为电压信号Vsd_ref和Vsq_ref,再经过park逆变换,得到Vsa_ref和Vsb_ref作为SVPWM的控制信
永磁同步电机的仿真模型 1、永磁同步电机介绍 永磁同步电动机(permanentMagnets synchronousMotor, PMSM>,转子采用永磁材料,定子为短距分布式绕组,采用三相正弦波交流电驱动,且定子感应电动势波形呈正弦波"定子绕组通过控制功率管(如IGBT>的不同开关组合,产生旋转磁场跟踪永磁转子的位置,自动地维持与转子的磁场有900的空间夹角,以产生最大的电机转矩"旋转磁场的转速则严格地由永磁转子的转速所决定,PMSM具有直流电动机的特性,有稳定的起动转矩,可以自行起动,并可类似直流电动机对电机进行闭环控制,多用于伺服系统和高性能的调速系统。 永磁同步电动机按转子形状可以分为两类:凸极式永磁同步电机和隐极式永磁同步电机。它们的区别在于转子磁极所在的位置,凸极式永磁同步电机转子磁极是突起在轴上的,其直轴和交轴电感参数不相等"而隐极式永磁同步电机的转子磁极是内置在轴内的,直轴和交轴电感参数相等"凸极式转子具有明显的磁极,定子和转子之间的气隙是不均匀的,因此其磁路与转子的位置有关。 2、永磁同步电机的控制方法 目前对永磁同步电机的控制技术主要有磁场定向矢量控制技术< field orientation control,FOC)与直接转矩控制技术 永磁同步电机弱磁调 速 永磁同步电机弱磁调速控制文献阅读报告 专业:电气工程及其自动化 学生姓名: 学生学号: 学生班号: 摘要 本篇论文是从阅读文献报告的角度来解读论文的。 稀土永磁同步电机早在上世纪七十年代就开始出现,现在已被广泛使用,其具有重量轻、体积小、效率高、弱磁扩速能力强等一系列优点,成为航空、航天、武器装备、电动汽车等领域重要发展方向。由于永磁同步电机磁场结构复杂,使得计算准确度差,磁极形状与尺寸的优化,调速性能等都是永磁电机设计的难点。这些年来,如何提高永磁同步电机恒功率调速比的问题是研究的重点,永磁电机及其驱动器的设计成了电机领域研究的热点课题。 本文主要研究内容是对内置式永磁同步电机设计及弱磁性能的研究。 分析永磁同步电机(PMSM)数学模型的基础上,通过阐述弱磁调速的控制原理,提出了一种基于电流调节的PMSM定子磁链弱磁控制算法,有效地拓宽了恒功率调速比。并在Matlab/Simulink环境下,构建了永磁同步电机弱磁控制系统的速度和电流双闭环仿真模型。仿真结果证明了该控制系统模型的有效性,恒功率调速比达到了4: 1,为永磁同步电机弱磁调速控制系统的设计和调试提供了理论基础,有一定的实际工程价值。 关键词:内置式;永磁电机;弱磁控制;电流跟踪算法;仿真建模 目录 目录 永磁同步电机弱磁调速控制文献阅读报告 (2) 一、研究的问题 (5) 二、研究方法 (5) 2.1 永磁电机的数学模型 (5) 2.2弱磁调速原理 (7) 2.3 基于Matlab的PMSM弱磁控制系统仿真模型建 立 (8) 2.4 仿真结果 (11) 三、解决效果 (13) 3.1 结论 (13) 3.2感悟与体会 (13) 基于SVPWM的永磁同步电机控制系统的仿真随着电动机在社会生产中的广泛应用,由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低,易于散热及维护等优点,特别是随着永磁材料价格的下降、材料的磁性能的提高、以及新型的永磁材料的出现,在中小功率、高精度、高可靠性、宽调速围的伺服控制系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广,尤其在航空航天、数控机床、加工中心、机器人等场合已获得广泛的应用。我国制作永磁电机永磁材料的稀土资源丰富,稀土资占全世界的80%以上,发展永磁电机具有广阔的前景。 第一章永磁同步电机的矢量控制原理 1.1 永磁同步电机控制中应用的坐标系 交流电机的数学模型具有高阶次,多变量耦合,非线性等特征,难以直接应用于系统的设计和控制,与直流电机单变量,自然解耦和线性的数学模型相比较,交流电机显得异常复杂。因此需要通过适当的转换,将交流电机的控制变换为类似直流电机的控制将大大简化交流电机控制的复杂程度。 永磁同步电机矢量控制的基本思想是把交流电机当成直流电机来控制,即模拟直流电机的控制特点进行永磁同步电机的控制。为简化感应电机模型,可将电机三相绕组电流产生的磁动势按平面矢量的叠加原理进行合成和分解,使得能够用两相正交绕组来等效实际电动机的三相绕组。由于两相绕组的正交性,变量之间的耦合大大减小。 1.1.1系统中的坐标系 1)三相定子坐标系(U-V-W坐标系) 其中三相交流电机绕组轴线分别为U、V、W,彼此之间互差120度空间 电角度,构成了一个U-V-W三相坐标系。空间任意一矢量在三个坐标上的投影代表了该矢量在三个绕组上的分量。 2)两相定子坐标系(α-β坐标系) 两相对称绕组通以两相对称电流也能产生旋转磁场。对于空间的任意一矢量,数学描述时习惯采用两相直角坐标系来描述,所以定义一个两相静止坐标系,即α-β坐标系。它的轴α和三相定子坐标系的A轴重合,β轴逆时针超前α轴90度空间电角度。由于α轴固定在定子A相绕组轴线上,所以α-β坐标系也是静止坐标系。 3)转子坐标系(d-q坐标系) 转子坐标系d轴位于转子磁链轴线上,q轴逆时针超前d轴90度空间电角度,该坐标系和转子一起在空间上以转子角速度旋转,故为旋转坐标系。对于同步电动机,d轴是转子磁极的轴线。 矢量控制中用到的变换有:将三相平面坐标系向两相平面直角坐标系的转换(Clarke 变换)和将两相静止直角坐标系向两相旋转直角坐标系的变换(Park变换)。 1.1.2 由三项平面坐标系向两相平面坐标系(Clarke变换) 三相同步电动机的集中绕组U、V、W的轴线在与转子垂直的平面分布如上图所示,轴线依次相差120°,可将每相绕组在气隙中产生的磁势分别记为:Fu、Fv、Fw。由于Fu、Fv、Fw不会在轴向上产生分量,所以可以把气隙的磁场简化为一个二维的平面场。简单起见,可以U为α轴,由α起逆时针旋转90°作β轴,建立起二维坐标系,用此两相坐标系(α-β)产生的磁动势来等效三相静止坐标系(U-V-W)产生的磁动势。如图1.1所示。 硕士学位论文 二0一五 年 六 月 作者姓名 指导教师 学科专业 控制工程 电动汽车用永磁同步电机控制系统设计 Design of permanent magnet synchronous motor control system for electric vehicle 摘要 本文在开始先介绍了研究电动汽车的背景及其意义,并介绍了电动汽车在国内外的发展现状,然后从电动汽车的燃油经济性,驱动性,安全性及舒适度,三个方面分析了电动汽车比其他燃料汽车存在的优越性。电动机是电动汽车的核心部件,本文中从其驱动方式把电动机分为四大类,直流有刷电动机,永磁同步电动机,永磁无刷直流电动机和开关磁阻电动机。本章从工作原理与性能方面分析了,这四种电动机各存在的优点和不足。从中得出永磁同步电动机是电动汽车比较理想的选择。本文刚开始介绍了永磁同步电动机PMSM的三种不同的控制方式,恒压频比控制,矢量控制,直接转矩控制,并从三者之间比较得出,PMSM采用直接转矩控制DTC的方式有着比其他两者更好的稳定性。 随后从永磁同步电动机PMSM的结构及其特点,分析了其优越性,并建立数学模型,根据空间矢量坐标关系推导出PMSM的在各坐标系下DTC的原理。本章分析了定子磁链与电磁转矩的估算和滞环控制,通过其原理研究了开关表控制的方式,并对PMSM的直接转矩控制DTC的Matlab/Simulink仿真,最终得出了DTC 较其它控制方式的稳定性。 其次分析了永磁同步电机PMSM的直接转矩控制DTC存在的诸多缺点,并提出基于SVM技术的SVPWM的控制方式,即空间矢量调制DTC控制策略,通过Matlab/Simulink仿真,得出SVPWM比PMSM DTC有着更好的稳定性。 TI公司推出的TMS320F2812 DSP芯片的控制系统设计,从硬件电路的设计和软件的设计,两个方面研究了该芯片。DSP硬件方面包含了智能模块的自保护特性,并设计了检测电路,保护电路,驱动电路和CAN通信等模块,软件系统方面分析了,其初始化流程图,接收流程图等。 关键词:永磁同步电机;直接转矩控制;DSP;SVPWM 基于Matlab的永磁同步电机矢量控制原理 摘要:在现代交流伺服系统中,矢量控制原理以及空间电压矢量脉宽调制(SVPWM)技术使得交流电机能够获得和直流电机相媲美的性能。永磁同步电机(PMSM)是一个复杂耦合的非线性系统。 关键词:永磁同步电机;电压空间矢量脉宽调制 0、引言 永磁同步电机(PMSM)是采用高能永磁体为转子,具有低惯性、快响应、高功率密度、低损耗、高效率等优点,成为了高精度、微进给伺服系统的最佳执行机构之一。永磁同步电机构成的永磁交流伺服系统已经向数字化方向发展。因此如何建立有效的仿真模型具有十分重要的意义。对于在Matlab中进行永磁同步电机(PMSM)建模仿真方法的研究已经受到广泛关注。 本文介绍了电压空间矢量脉宽调制原理并给出了坐标变换模块、SVPWM模块以及整个PMSM闭环矢量控制仿真模型,给出了仿真模型结构图和仿真结果。 1、永磁同步电机的数学模型 永磁同步电机在d-q轴下的理想电压方程为: (1) (2) (3) (4) (5) (6) (7) 式中,ud和uq分别为d、q轴定子电压;id和iq分别为d、q 轴定子电流;和分别为d、q轴定子磁链;ld和lq分别为定子绕组d、q轴电感;r为定子电阻;p为微分符号;lmd 为定、转子间的d轴电感;ifd为永磁体的等效d轴励磁电流;pn为极对数;te为电磁转矩;tl为负载转矩;j为转动惯量;b为阻尼系数;为转子角速度。 2、电压空间矢量脉宽调制原理 2.1电压空间矢量 电机输入三相正弦电压的最终目的是在空间产生圆形旋转磁场,从而产生恒定的电磁转矩。直接针对这个目标,把逆变器和异步电机视为一体,按照跟踪圆形旋转磁场来控制PWM 电压,这样的控制方法称为“磁链跟踪控制”,磁链的轨迹是靠电压空间矢量相加得到的,所以又称“电压空间矢量PWM控制”。 空间矢量是按电压所加绕组的空间位置来定义的。在图1中,A、B、C分别表示在空间静止不动的电机定子三相绕组的轴线,它们在空间互差120°,三相定子相电压U A、U B、 基于TMS320LF2406的交流永磁同步电机控制器设计 介绍了一种交流永磁同步电机全数字伺服控制器的软硬件组成及设计方案,系统采用TI DS P TMS320LF2406组成核心控制电路,以智能功率模块构成主电路,具有通用紧凑的系统结构. 1 引言 近年来,交流伺服系统的应用已经十分广泛,特别是在要求高精度、高响应的应用场合,交流永磁同步电机伺服系统具有非常明显的优势。随着微电子技术和功率电子技术的飞速发展,在交流伺服系统中已经采用了各种新颖的器件如数字信号处理器(DSP)、智能功率模块(I PM)等,使伺服控制器从模拟控制转向数字控制,而数字控制在精度、可靠性以及灵活性等方面的优势,也促使交流伺服系统向全数字化、智能化、小型化方向发展。 本文研究了采用TI公司的新一代低功耗、高速DSP芯片TMS320LF2406的全数字交流伺服控制器的软硬件设计和控制方案。TMS320LF2406采用3.3V供电,在性能上有了进一步的增强,不仅具有更强的实时运算能力,并且集成了丰富的电机控制外围电路,特别适用于对控制器体积、性能要求较高的应用。 2 交流永磁同步电机矢量控制 交流永磁同步电机在磁路不饱和,磁滞及涡流的影响忽略不计,定子三相电流产生的空间磁势及永磁转子的磁通分布呈正弦波形状的条件下,若不考虑转子磁场的凸极效应,即L d=Lq=L,可得其在d_q坐标系上的状态方程为[1]: 其中R:绕组等效电阻;L:等效电感;p:微分算子(d/dt);Np:电机磁极对数;ωm:转子机械角速度;ψf:转子永磁效应对应的每对磁极磁通;Tl:折算到电动机轴上的总负载转矩;J:折算到电机轴 上的总转动惯量。 式(1)中系数矩阵含有变量ωm,所以可知永磁同步伺服电机是一种非线性的控制对象,且d轴电流分量id和q轴电流分量iq之间存在耦合作用,为使永磁同步电动机具有和直流电动机一样的控制性能,通常采用id≡0的线性化解耦控制,即在初始定向A相绕组和d轴重合之后, 始终控制电枢电流矢量位于q轴上,和转子磁链矢量正交。然而从状态方程可以看出,d_q坐标系上的状态变量存在着耦合关系,即vd不仅依赖于id,同时和iq也有关系,这给控制器的设计带来了很大的问题,在通常的模拟方式交流伺服控制器中,只能通过增大电流控制器的增益实现电流矢量的快速跟踪,得到近似线性化的解耦控制效果,而对于全数字化交流伺服控制器,如果知道交流永磁同步电机的感应反电势常数、电枢绕组的电感值,则可以通过完全去耦控制实现精确地线性化控制。现假设感应反电势常数、电枢绕组的电感值已知,那永磁同步电机弱磁调速讲课稿
基于某SVPWM的永磁同步电机控制系统的仿真
电动汽车用永磁同步电机控制系统设计
MatlabSimulink对永磁同步电机(PMSM)_矢量控制原理
永磁同步电机控制器
相关主题
文本预览