电气与电子信息工程学院
《计算机仿真及应用B》题目
学号:
姓名:
班级:
任课老师:
三相异步电动机的建模与仿真
一.实验题目三相异步电动机的建模与仿真
二.实验原理
三相异步电动机也被称作感应电机,当其定子侧通入电流后,部分磁通将穿过短路环,并在短路环内产生感应电流。短路环内的电流阻碍磁通的变化,致使有短路环部分和没有短路环部分产生的磁通有相位差,从而形成旋转磁场。转子绕组因与磁场间存在着相对运动而产生感应电动势和感应电流,即旋转磁场与转子存在相对转速,并与磁场相互作用产生电磁转矩,使转子转起来,从而实现能量转换。
三相异步电动机具有结构简单,成本较低,制造,使用和维护方便,运行可靠以及质量
较小等优点,从而被广泛应用于家用电器,电动缝纫机,食品加工机以及各种电动工具,小型电机设备中,因此,研究三相异步电动机的建模与仿真。
三.实验步骤
1. 选择模块
首先建立一个新的simulink 模型窗口,然后根据系统的描述选择合适的模块添加至模型窗口中。建立模型所需模块如下:
1) 选择simPowerSystems 模块库的Machines 子模块库下的Asynchronous Machine SI Units
模块作为交流异步电机。
2) 选择simPowerSystems 模块库的Electrical Sources 子模块库下的Three-Phase
Programmable Voltage Source 模块作为三相交流电源。
3) 选择simPowerSystems 模块库的Three-Phase Library 子模块库下的Three-Phase Series
RLC Load 模块作为串联RLC 负载。
4) 选择simPowerSystems 模块库的Elements 子模块库下的Three-Phase Breaker 模块作为
三相断路器,Ground 模块作为接地。
5) 选择SimPowerSystems 模块库的Measurements 子模块库下的Voltage Measurement 模块
作为电压测量。
6) 选择Sources 模块库下的Constant 模块作为负载输入。
7) 选择Signals Rounting 模块库下的Bus Selector 模块作为直流电动机输出信号选择器。
8) 选择Sinks 模块库下的Scope 模块。
9) 选择SimPowerSystems 模块库的Measurements 子模块库下的Three-phase V-I
Measurements 用于创建子系统。
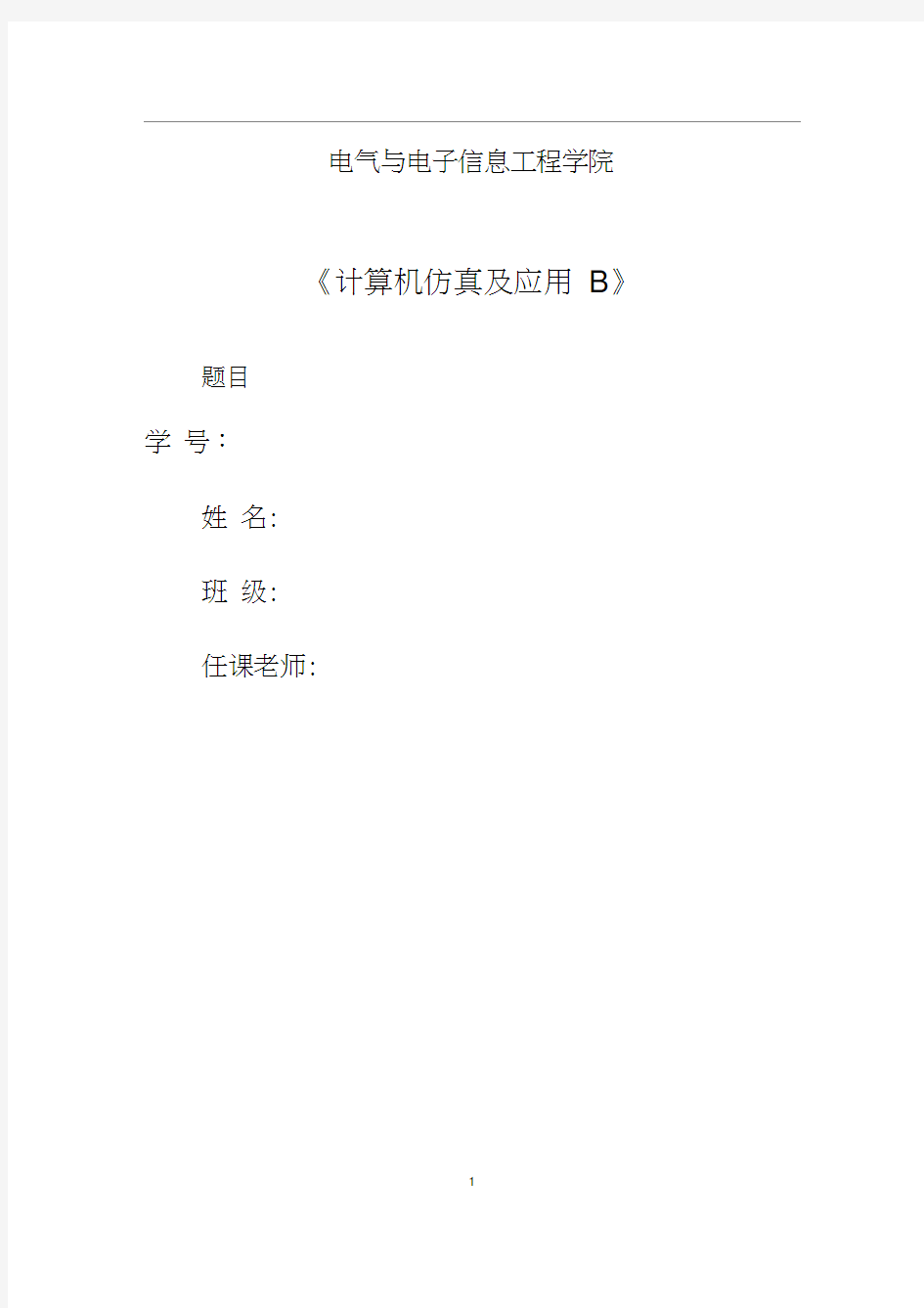
2. 搭建模块将所需模块放置合适位置,再将模块从输入端至输出端进行相连,搭建完的串电阻起
动simulink 模型如图 1 所示
I W l
图1三相异步电动机SimUlinks仿真模型
3. 模块参数设置
(1)ASynChronOUS MaChine SI Units 模块参数设置
双击ASynchronous MaChine SI Units 模块,则弹出ASynChronOUS MaChine SI UnitS 模块参数设置对话框。三相异步电动机模块的具体参数设置如图2所示:
图2 ASynchronOUS MaChine SI Units 模块参数设置对话框
(2)Three-PhaSe PrOgrammabIe Voltage SOUrCe 模块参数设置
双击Three-PhaSe PrOgrammabIe Voltage SOUrCe 模块,则弹出Three-PhaSe PrOgrammabIe Voltage SOUrCe模块参数设置对话框。三相可调交流电压源的具体参数设置如图3:
? BlCCk 3,a r,anπeteιr?: Th『孔?PhaSe Pr□graιmιm∣abe VoItage SoUr-Ce
>∣ree*Phase Pr&gramntable VaBage SDUr□? (IIa^?)i
This blcck inp Ienents a threier-jihase EerD-Lnιp≡dance Valiage scnirze. Γhs CormCn node (neutral) of the e Hiree i≡ G-ccessible VLa LriPIJt 1 (N) Of the bLock?TiJrle VarlatIon for the 呂IuPlItud引phase and f re3uer∣cy JD'JTCBS
匚f Ihe ΓJΓL Ianental 亡血be PTe-Prog.ramπιed?Ir- 3Lddl a tiDΓ∣? two harnorucE CalL be mp?rimposed art-the
JUzIdaJlental≡
M□t?: FoE PhaSOr simjlaticri" j f r?quenDjA,rrarιsLtiCrι zndL haraianxc ιnj≡ctιw ≥ιe not ILL o-re∣l 5匚咚匚Ify
OriBr -1 and Ξeq≡J j2 Or D to L^ιj?ct additional fn?Idanlerid^I ccjLp?n^jms A and B In ?ny SeQ i iISni:e.
图 3 Three-PhaSe PrOgrammabIe Voltage SOUrCe 模块参数设置对话框
(3)Three-PhaSe SerieS RLC Load 模块参数设置
双击Three-PhaSe SerieS RLC Load 模块,则弹出Three-PhaSe SerieS RLC Load 模块参数设置
对话框。模块的具体参数设置如图4所示:
图4 Three-PhaSe SerieS RLC Load模块参数设置对话框
(5)Three-PhaSe Breaker模块参数设置
双击Three-PhaSe Breaker模块,则弹出Three-PhaSe Breaker模块参数设置对话框。三相断路
器模块的具体参数设置如图5所示:
图5 Three-PhaSe Breaker模块参数设置对话框
(5) ConStant模块参数设置
双击系统模型窗口中的ConStant模块,则弹出ConStant模块设置对话框。其具体参数设置如图6所示:
东北大学秦皇岛分校控制工程学院自动控制系统课程设计 设计题目:直流电动机开环调速系统 设计与仿真 专业名称自动化 班级学号 学生姓名 指导教师 设计时间2015.7.13~2014.7.24 成绩
目录 1.设计任务书 (3) 2.概述 (4) 2.1前言 (4) 2.2 系统原理 (4) 2.3 simulink框图 (5) 3.元件参数设置 (7) 3.1三相交流电压源设置 (7) 3.2.同步六脉冲触发器 (7) 3.3.三相全控桥整流电路 (8) 3.4.直流电动机设计 (8) 4.仿真结果分析 (9) α=时 (12) 4.2 当30o α=时 (14) 4.3 当60o α=时 (17) 4.4 当90o 4.5励磁电流 (19) 5.结论 (20) 6.参考文献 (22) 7.结束语 (22)
东北大学秦皇岛分校控制工程学院 《自动控制系统》课程设计任务书 专业自动化班级姓名 设计题目:直流电动机开环调速系统设计与仿真 一、设计实验条件 地点:实验室 实验设备:PC机 二、设计任务 直流电动机的额定数据为220V,136A,1460r/min,4极, R=0.21 , a 22 GD=22.5N m;励磁电压为220V,励磁电流为1.5A。采用三相桥式全控整流电路。平波电抗器 L=200mH。 p 设计要求:设计并仿真该晶闸管-电动机(V-M)开环调速系统。观察电动机在全压起动和起动后加额定负载时电动机的转速、转矩和电流变化。 三、设计说明书的内容 1、设计题目与设计任务(设计任务书) 2、前言(绪论)(设计的目的、意义等) 3、主体设计部分 4、参考文献 5、结束语 四、设计时间与设计时间安排 1、设计时间:7月13日~7月24日 2、设计时间安排: 熟悉课题、收集资料:3天(7月13日~7月15日) 具体设计(含上机实验):6天(7月16日~7月21日) 编写课程设计说明书:2天(7月22日~7月23日) 答辩:1天(7月24日)
学生毕业设计(毕业论文) 系别:机电工程 专业:数控技术 设计(论文)题目:三相异步交流电机
毕业设计(论文)任务书 一、课题名称:三相异步电机的设计 二、主要技术指标: 1.内部由定子和转子构成。 2. 外壳有机座、端盖、轴承盖、接线盒、吊环等组成。 3. 技术要求:采用电压AC380,可以实现正反转。 三、工作内容和要求: 1.设计磁路部分:定子铁心和转子铁心。 2 设计电路部分:定子绕组和转子绕组以及电路图。 3 设计机械部分:机座、端子、轴和轴承等。 4.设计电路的正反转和安全控制部分。 5.按照“毕业设计规格”设计毕业报告。 四、主要参考文献: 1.[1]王世琨.《图解电工入门》[M].中国电力出版社.2008.
2.[2]满永奎.《电工学》[M].清华大学出版社.2008. 3.[3]乔长君.《电机绕组接线图册》[M].化学工业出版社.2012. 4.百度文库 学生(签名)年月日 指导教师(签名)年月日 教研室主任(签名)年月日 系主任(签名)年月日
毕业设计(论文)开题报告
摘要
在费拉里斯和特斯拉发明多相交流系统后,19世纪80年代中期,多沃罗沃尔斯基发明了三相异步电机,异步电机无需电刷和换向器三相异步电机(Triple-phase asynchronous motor)是靠同时接入380V三相交流电源(相位差120度)供电的一类电动机,由于三相异步电机的转子与定子旋转磁场以相同的方向、不同的转速成旋转,存在转差率,所以叫三相异步电机。 作电动机运行的三相异步电机。三相异步电动机转子的转速低于旋转磁场的转速,转子绕组因与磁场间存在着相对运动而感生电动势和电流,并与磁场相互作用产生电磁转矩,实现能量变换。与单相异步电动机相比,三相异步电动机运行性能好,并可节省各种材料。按转子结构的不同,三相异步电动机可分为笼式和绕线式两种。笼式转子的异步电动机结构简单、运行可靠、重量轻、价格便宜,得到了广泛的应用。 Reese and Tesla invented in AC system. At the mid of 1880s, 多沃罗沃尔Chomsky invented the three-phase asynchronous motors, asynchronous motors without brushes and commutate. Three-phase asynchronous motors (Triple-phase asynchronous motor) is by simultaneously accessing 380V three-phase AC power supply of a class of motors, three-phase asynchronous motor as the rotor and the stator rotating in the same direction, to rotate at different speeds, there turn slip, so called three-phase asynchronous motors. For three-phase asynchronous motors motor is running. Three-phase asynchronous motor rotor speed is lower than the speed of the rotating magnetic field, the magnetic field due to the rotor windings relative motion exists between the induced electromotive force and current, and the magnetic field generated by the interaction with the electromagnetic torque and achieve energy conversion. Compared with single-phase induction motor, Three- phase asynchronous motor running properties, and save a variety of materials. According to the different structure of the rotor, three-phase cage induction motor and the winding can be divided into two kinds. Cage rotor induction motor, simple structure, reliable operation, light weight, cheap, has been widely used
第一章课程设计内容及要求 1. 直流电动机的机械特性仿真; 2. 直流电动机的直接起动仿真; 3. 直流电动机电枢串联电阻启动仿真; 4. 直流电动机能耗制动仿真; 5.直流电动机反接制动仿真; 6. 直流电动机改变电枢电压调速仿真; 7. 直流电动机改变励磁电流调速仿真。 要求:编写M文件,在Simulink环境画仿真模型原理图,用二维画图命令画仿真结果图或用示波器观察仿真结果,并加以分析
第二章直流电动机的电力拖动仿真绘制 1)直流电动机的机械特性仿真 clear; U_N=220;P_N=22;I_N=115; n_N=1500;R_a=;R_f=628; Ia_N=I_N-U_N/R_f; C_EPhi_N=(U_N-R_a*Ia_N)/n_N; C_TPhi_N=*C_EPhi_N; Ia=0;Ia_N; n=U_N/C_EPhi_N-R_a/(C_EPhi_N)*Ia; Te=C_TPhi_N*Ia; P1=U_N*Ia+U_N*U_N/R_f; T2_N=9550*P_N/n_N; figure(1); plot(Te,n,'.-'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm'); ylim([0,1800]); figure(2); plot(Te,n,'rs'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm');
hold on; R_c=0; for coef=1:;; U=U_N*coef; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'k-'); str=strcat('U=',num2str(U),'V'); s_y=1650*coef; text(50,s_y,str); end figure(3); n=U_N/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'rs'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm'); hold on; U=U_N;R_c=; for R_c=0::; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'k-'); str=strcat('R=',num2str(R_c+R_a),'\Omega'); s_y=400*(4-R_c*; text(120,s_y,str);
关于电机的毕业设计 【篇一:电机设计毕业论文】 目录 摘 要 ....................................................................................................... .. (1) abstract ............................................................................................. . (1) 第一章中小型电机设计概 述 ....................................................................................................... . (2) 1.1设计技术要 求 ....................................................................................................... .. (2) 1.2电机主要尺 寸 ....................................................................................................... .. (2) 1.3 绕组构及成原 理 ....................................................................................................... (4) 1.4主磁 路 ....................................................................................................... .. (4) 1.5电 抗 ....................................................................................................... (6) 1.6损耗与效 率 ....................................................................................................... (7) 1.7通风散 热 ....................................................................................................... . (7) 第二章三相异步电动机设计(y180l- 6/15kw) (9)
PLC控制三相异步电动机正反转设计 Plc control with a three wire asynchronous motor is inverting design 摘要本论文文设计了三相异步电动机的PLC控制电路,就是三相异步电动机的正反转控制,与传统的继电器控制相比,具有控制速度快、可靠性高、灵活性强等优点。非常实用。三相异步电动机的应用非常广泛,具有机构简单,效率高,控制方便,运行可靠,易于维修成本低的有点,几乎涵盖了工农业生产和人类生活的各个领域,在这些应用领域中,三相异步电动机运行的环境不同,所以造成其故障的发生也很频繁,所以要正确合理的利用它。本文研究的这个系统的控制是采用PLC的编程语言----梯形图,梯形语言是在可编程控制器中的应用最广的语言,因为它在继电器的基础上加进了许多功能,使用灵活的指令,使逻辑关系清晰直观,编程容易,可读性强,所实现的功能也大大超过传统的继电器控制电路,可编程控制器是一种数字运算操作的电子系统,它是专为在恶劣工业环境下应用而设计,它采用可编程序的存储器,用来在内部存储执行逻辑运算,顺序控制,定时,计数和算术等操作的指令,并采用数字式,模拟式的输入和输出,控制各种的机械或生产过程。 关键词:PLC 三相异步电动机可编程控制梯形图
Plc control with a three wire asynchronous motor is inverting design Abstract This paper designed the three-phase asynchronous motor PLC control circuit, is a three-phase asynchronous motor positive inversion control, compared with the traditional relay control, with high speed, high reliability, flexibility and other advantages. Very practical. The three-phase asynchronous motor is widely used, has the advantages of simple mechanism, high efficiency, easy control, reliable operation, easy to repair and low cost a little, almost covers the industrial and agricultural production and all aspects of human life, in these applications, three-phase asynchronous motor running in different environments, so the fault occurrence is also very frequently, so a correct and reasonable use of it. This paper studies the system control is the use of PLC programming language - ladder, ladder language is in the programmable controller in the most widely used language, because it is in the relay is added on the basis of the many functions, the use of flexible instruction, so that the logic relationship of a clear and intuitive, easy programming, readability is strong, the realization of the functions it considerably exceeds the traditional relay control circuit, the programmable controller is a digital electronic computing operating system, it is designed for use in harsh industrial application environment and design, it uses a programmable memory, used in the internal memory to perform logic operations, sequence control, timing, counting and arithmetic operations such as instruction, and the use of digital, analog input and output, the
三相异步电动机结构的各部件起什么作用? 异步电动机的结构主要由两个基本部分组成,即定子(静止部分)和转子(旋转部分)。一.定子它由定子铁心、定子绕组和机座等部分组成。 (1)定子铁心。它是电动机磁路的一部分,由0.35~0.5mm厚表面涂有绝缘漆或氧化膜的薄硅钢片叠压而成,固定在机座内。定子铁心的内圆冲有均匀分布的槽口,用来嵌放三相定子绕组。绕组与铁心之间是互相绝缘的。 (2)定子绕组。由于它是能量转换的“枢纽”,又称电枢绕组。它是异步电动机的电路部分,通入三相电源后,就会产生三相旋转磁场。三相定子绕组是3个彼此独立、按一定方式连接的对称绕组,它们按一定的空间角度依次嵌在定子槽内。为了便于变换接法,绕组6个端头都引到接线盒内。 (3)机座。它一般由铸铁或铸钢制成。其作用是固定定子铁心和定子绕组。机座两端的两个端盖,以支承转子轴。 二.转子它是异步电动机的旋转部分,电动机的工作转矩就是从转子轴上输出的。它由转子铁心、转子绕组和转轴3部分组成。 (1)转子铁心。它是电动机磁路的一部分,是由圆形薄硅钢片叠装而成。在硅钢片外圆上冲有均匀分布的槽口,用来嵌放转子绕组。转子铁心压装在轴上。 (2)转子绕组。它又分为笼型和线绕式两种。目前中小型异步电动机的笼型转子,一般都用熔化的铝浇入转子铁心槽内,并将两个端环(短路环)与冷却用风扇浇铸在一起而成。由于转子绕组形状像鼠笼,故称为笼型异步电动机。线绕式转子绕组和定子绕组相似,也是三相对称绕组,一般都接成星形。3个出线端通过转轴内孔分别接到与转轴固定的3个铜制互相绝缘的滑环上(集电环),滑环靠电刷与外接变阻器电路相连接,接入变阻器主要是为了改善电动机的起动性能或调节电动机的转速。
5.2 基于MATLAB的电机起动仿真 在上节直流电机参数测试的基础上,本节作了基于MATLAB/Simulink的直流电机起动仿真研究[46-47],得到了电机起动过程中的电动机电流、电动机角速度、电枢电压和电磁转矩波形并分析了其仿真结果,为实物测试提供了简便经济的预测和验证。 5.2.1 电机起动仿真模型的建立 自MATLAB从5.3版本中新增进了电力系统工具箱(Power System Blockset)发展至今,MATLAB在电力系统仿真中的应用越来越广泛。电力系统工具箱是一个基于图形编程的电力系统仿真工具箱。主要是由加拿大的HydroQuebec和International公司共同开发的,其功能非常强大,可以用于电路、电力电子系统、电机系统、电力传输等过程的仿真,它提供了一种类似电路建模的方式进行模型绘制,使用者不需要自己编程而只需将仿真的电力系统图搭建在工作窗口中,MATLAB自动将其变化成状态方程描述的系统形式,便可以在SIMULINK下进行仿真研究了。 图5.4 电机起动仿真模型 电力系统工具箱包含的模块有:Electrical Sources(电源库)、Elements(元件库)、Power Electronics(电力电子元件库)、Machines(电机库)、Connectors (连接器库)、Measurements(测量仪器库)、Extra Library(附加元件库)、Demos (示例库)、Powergui(图形用户界面graphical user interface),在此基于MATLAB 对电机起动进行SIMULINK仿真。 搭建的电机起动仿真模型主要由直流电压源(DC V oltage Source)、理想开关(Ideal Switch)、电机起动器(Motor Starter)、直流电机(DC machine)、串联RLC支路(Series RLC Branch)、电压表(V oltage Measurement)、信号分解模块(Demux)和示波器(Scope)等模块构成。仿真模型如图5.4所示。 仿真系统中励磁电压Ef由一个直流电压源提供,电枢绕组电动势E由另一个直流电压源经一个由计时器(Timer)控制的理想开关(Ideal Switch)提供。采用电枢回路串电阻三级起动,电机起动器由搭建并封装的子系统(Motor
以下文档格式全部为word格式,下载后您可以任意修改编辑。 西安邮电大学 毕业设计(论文) 题目:三相异步电机调速闭环控制系统设计 系别:自动化学院 专业:自动化专业 班级:自动0703班 学生姓名: 导师姓名:职称:讲师 起止时间:2006年01月10日至2006年06月17日毕业设计(论文)诚信声明书本人声明:本人所提交的毕业论文《三相异步电机调速闭环控制系统设计》是本人在指导教师指导下独立研究、写作的成果,论文中所引用他人的文献、数据、图件、资料均已明确标注;对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式
注明并表示感谢。 本人完全清楚本声明的法律后果,申请学位论文和资料若有不实之处,本人愿承担相应的法律责任。 论文作者签名:时间:年月日指导教师签名:时间:年月日 西安邮电学院 毕业设计(论文)任务书 学生姓名指导教 师职称讲师 院(系)自动化学院专业自动化 题目 三相异步电动机调速闭环控制系统设计 任务与要求
1、了解电动机调速的基本原理。 2、熟练掌握组态王6.52软件。 3、会使用组态王6.52软件画组态界面。 4、绘制电气原理图、装配图、接线图。 5、熟练掌握S7-300软件,具有一定的编程能力 开始日期1月10日完成日6月17日 院长(签字) 2011 年 1 月 10 日 西安邮电学院 毕业设计 (论文) 工作计划 学生姓名_苗晓强__指导教师___沈建冬______职称____讲师____ 院(系)______自动化学院_________专业________自动化
________ 题目_三相异步电动机调速闭环控制系统设计 ____________________________________________________ ___ 工作进程 1月10日~4月5日了解电动机调速的基本原理 4月6日~4月20日熟悉S7-300软件编程环境及组态王软件 4月21日~5月4日画出组态王监控画面 5月5日~5月20日编写并调试电动机调速控制程序 5月21日~6月17日撰写毕业论文
三相异步电动机结构详细图解 图1封闭式三相异步电动机的结构 1—端盖2—轴承3—机座4—定子绕组5—转子 6—轴承7—端盖8—风扇9—风罩10—接线盒 异步电动机的结构也可分为定子.转子两大部分。定子就是电机中固定不动的部分,转子是电机的旋转部分。由于异步电动机的定子产生励磁旋转磁场,同时从电源吸收电能,并产生且通过旋转磁场把电能转换成转子上的机械能,所以与直流电机不同,交流电机定子是电枢。另外,定.转子之间还必须有一定间隙(称为空气隙),以保证转子的自由转动。异步电动机的空气隙较其他类型的电动机气隙要小,一般为~2mm。 三相异步电动机外形有开启式.防护式.封闭式等多种
形式,以适应不同的工作需要。在某些特殊场合,还有特殊的外形防护型式,如防爆式.潜水泵式等。不管外形如何电动机结构 基本上是相同的。现以封闭式电动机为例介绍三相异步电动机的结构。如图1所示是一台封闭式三相异步电动机解体后的零部件图。 1.定子部分 定子部分由机座.定子铁心.定子绕组及端盖.轴承等部件组成。 (1)机座。机座用来支承定子铁心和固定端盖。中.小型电动机机座一般用铸铁浇成,大型电动机多采用钢板焊接而成。 (2)定子铁心。定子铁心是电动机磁路的一部分。为了减小涡流和磁滞损耗,通常用厚的硅钢片叠压成圆筒,硅钢片表面的氧化层(大型电动机要求涂绝缘漆)作为片间绝缘,在铁心的内圆上均匀分布有与轴平行的槽,用以嵌放定子绕组。 (a)直条形式(b)斜条形式
图2 笼型异步电动机的转子绕组形式 (3)定子绕组。定子绕组是电动机的电路部分,也是最重要的部分,一般是由绝缘铜(或铝)导线绕制的绕组联接而成。它的作用就是利用通入的三相交流电产生旋转磁场。通常,绕组是用高强度绝缘漆包线绕制成各种型式的绕组,按一定的排列方式嵌入定子槽内。槽口用槽楔(一般为竹制)塞紧。槽内绕组匝间.绕组与铁心之间都要有良好的绝缘。如果是双层绕组(就是一个槽内分上下两层嵌放两条绕组边),还要加放层间绝缘。 (4)轴承。轴承是电动机定.转子衔接的部位,轴承有滚动轴承和滑动轴承两类,滚动轴承又有滚珠轴承(也称为球轴承),目前多数电动机都采用滚动轴承。这种轴承的外部有贮存润滑油的油箱,轴承上还装有油环,轴转动时带动油环转动,把油箱中的润滑油带到轴与轴承的接触面上。为使润滑油能分布在整个接触面上,轴承上紧贴轴的一面一般开有油槽。 2.转子部分 转子是电动机中的旋转部分,如图中的部件5。一般由
摘要 电机的起动电流近似的与定子的电压成正比,因此要采用降低定子电压的办法来限制起动电流,即为降压起动。对于因直接起动冲击电流过大而无法承受的场合,通常采用降压起动,此时,起动转矩下降,起动电流也下降,所以只适合必须减小起动电流,又对起动转矩要求不高的场合。常见降压起动方法:定子串电阻降压起动、Y/Δ起动控制线路、延边三角起动、软启动及自耦变压器降压起动。 当负载对电动机启动力矩无严格要求但要限制电动机启动电流且电机满足 380V/Δ接线条件才能采用降压启动。该方法是:在电机启动时将电机接成星型接线,当电机启动成功后再将电机改接成三角型接线(通过双投开关迅速切换);因电机启动电流与电源电压成正比,此时电网提供的启动电流只有全电压启动电流 的1/3,但启动力矩也只有全电压启动力矩的1/3。 在实际使用过程中,发现需降压启动的电机从11KW开始就有需要的,如风机,在启动时11KW电流在7-9倍(100)A左右,按正常配置的热继电器根本启动不了(关风门也没用),热继电器配大了又起不了保护电机的作用,所以建议用降压启动。而在一些启动负荷较小的电机上,由于电机到达恒速时间短,启动时电流冲击影响较小,所以在30KW左右的电机,选用1.5倍额定电流的断路器直接启动,长期工作一点问题都没有。 关键词:三相异步电动机降压启动启动方法
目录 摘要...................................................................... I 目录..................................................................... II 第1章绪论.. (1) 第2章三相异步电动机的基本结构 (2) 2.1 定子的结构组成 (2) 2.2 转子的结构组成 (2) 2.3 工作原理 (2) 第3章异步电动机的分类及优缺点 (3) 3.1 三相异步电动机的优点 (3) 3.2 异步电动机存在的缺点 (3) 第4章三相异步电机启动出现的问题 (5) 4.1 异步电动机启动时的要求 (5) 4.2 三相异步电动机启动问题 (5) 4.3 工业生产机械不同的起动条件 (6) 第5章三相异步电动机起动方式 (7) 5.1 直接启动 (7) 5.2 三相异步电动机的Y—Δ起动控制 (8) 5.3 定子串电阻降压起动控制 (10) 5.4 自耦变压器降压启动 (11) 5.5 软启动 (14) 结论 (15) 致谢 (17) 参考文献 (18)
本科毕业设计(论文) 文献综述 院(系):电气信息学院 专业:电气工程与自动化 班级:2010级 学生姓名:学号: 2013 年12 月18 日本科生毕业设计(论文)文献综述评价表
75KW三相鼠笼异步电动机设计1前言: 现在社会中,电能是使用最广泛的一种能源,在电能的生产、输送和使用等方面,作为动力设备的电机是不可缺少的一部分。电机是各个行业生产过程及日常生活中普遍使用的基础设备,它是进行电能量和机械能量转换的主要器件。它在现代工业、现代农业、现代国防、交通运输、科学技术、信息传输和日常生活中都得到最广泛的应用。 三相异步电动机在生产和交通运输中得到广泛使用,例如,在工业方面,它被广泛用于拖动各种机床、水泵、压缩机、搅拌机、起重机械等。在农业方面,他被广泛用于拖动排灌机械、脱粒机及各种农产品的加工机械。在家用电器和医疗器械和国防设施中,异步电动机也应用十分广泛,作为拖动各种机械的动力设备。随着电气化和自动化程度的不断提高,异步电动机将占有越来越重要的地位。而随着电力电子技术的不断发展,由异步电动机构成的电力拖动系统也将得到越来越广泛的应用。异步电动机与其它类型电机相比,之所以能得到广泛的应用是因为它具有结构简单、制造容易、运行可靠、效率较高、成本较低和坚固耐用等优点。 电动机是把电能转化为机械能,电动机作为各种用途的生产机械的动力元件,功率从几瓦到几万千瓦,每分钟转速从几十到几千转,应用十分广泛。电动机主要分为同步电动机、异步电动机与直流电动机三种,分别应用于不同的场合,而其中以三相异步电动机的使用最为广泛。 2 主题: 提高国内电机的可靠性和经济性指标被列为“十五”计划基本任务的两项重要内容。国内电机质量和技术水平差距的其中两个体现方面就可靠性差,经济指标落后。对电机进行细微的失效机理分析,采用新的设计方案、新的原材料及加工工艺是提高电机可靠性和经济指标的根本途径。 国外公司注重新产品开发,在电机的安全、噪声、电磁兼容等方面很重视。国外的先进水平主要体现在电机的可靠性高,寿命长,通用化程度高,电机效率不断提高,噪声低,重量轻,电机外形美观,绝缘等级采用F级和H级。国内市场供大于求,只能去发展特殊、专用电机,开发新产品,满足配套主机行业的特殊需要;国外市场由于普通中小型电机特别是小型电机是传统工业产品,耗用原材料及工时多而获利少,是劳动密集型产品,工业发达国家普遍不愿意生产,纷纷
长春大学 课程设计说明书 题目名称直流电机速度PID控制与仿真 院(系)电子信息工程学院 专业(班级)自动化13403 学生姓名张华挺 指导教师曹福成 起止日期2016.10.24——2016.11.04
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊ 直流电机速度PID控制与仿真 摘要:在本次课程设计中重点研究直流电机的工作原理以及直流电机的各种调速方法。在调速控制中,我们包含两个大的部分,一个是直流电机的开环控制,另一个是直流电机的闭环控制,在直流电机的闭环控制中,又分别介绍转速闭环控制和PID闭环控制,并且对直流电机的每个模型进行建模并仿真,观察其动态性能,分析研究直流电机的各个控制的优缺点。 关键词:直流电动机;转速控制;PID控制;Matlab仿真
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊ DC Motor Speed PID Control and Simulation Abstract: In this curriculum design, the work principle of DC motor and DC motor speed control methods are studied. In speed control, we include two parts, one is the open loop control of DC motor, the other is a closed loop DC motor control in DC motor closed-loop control, and introduces the speed closed-loop control and PID control, and each model of the DC motor for modeling and simulation to observe the dynamic performance analysis of DC motor control and the advantages and disadvantages of each. Keywords: DC motor; speed control; PID control; Matlab simulation
Anhui Vocactional & Technical College of Industry & Trade 毕业论文 三相异步电动机调速系统设计 Three-phase asynchronous motor drive system design 所在系院:电气与信息工程系 专业班级:、 机电一体技术 学生学号:43 学生姓名:叶海英 指导教师:王琳 ; 2013年3月23日 安徽工贸职业技术学院
毕业设计(论文)任务书系(院)专业班级 学生姓名学号 一、题目: 二、内容与要求: 》 三、设计(论文)起止日期: 任务下达日期:年月日 完成日期:年月日 指导教师签名: 年月日 四、教研室审查意见: 教研室负责人签名: 年月日 ~ 摘要
本文所讨论的是三相异步电动机的串级调速的基本原理与实现方法。对于一般交流电动机的调速,我们都是从电动机的定子侧引入控制变量(改变定子供电电压、频率)来实现的,这对于转子处于短路状态的三相笼型异步电动机是唯一的途径。但是,对于绕线式异步电动机来说,其转子绕组能够通过变量以实现调速。绕线式异步电动机转子侧的控制变量有电流、电动势、电阻等。通常转子电流随负载的大小决定,不能任意调节;而转子回路阻抗的调节属于耗能型调速,缺点较多,所以转子侧的控制变量只能是电动势。在发挥绕线式异步电动机转子的可控性优势的基础上,提高调速性能需要从两方面着手: 1从节能角度考虑,应将损耗在转子附加电阻上的能量吸收,转化成别的有用的能量或反馈到电网,以提高传动系统的效率 2从高性能调速要求考虑,应用控制理论,将其组成闭环调速控制系统,满足调速精度、动态响应等指标的要求。 综合所述,利用串级调速系统,是使绕线式异步电动机实现高性能调速的有效办法。用转子串反电动势来代替电阻,吸收转差功率;用双闭环控制提高系统的静、动态性能。把这种用附加电动势的方法将转差功率回收利用的调速称为双闭环串级调速。
三相异步电动机结构图解 图1封闭式三相异步电动机的结构 1—端盖2—轴承3—机座4—定子绕组5—转子 6—轴承7—端盖8—风扇9—风罩10—接线盒 异步电动机的结构也可分为定子.转子两大部分。定子就是电机中固定不动的部分,转子是电机的旋转部分。由于异步电动机的定子产生励磁旋转磁场,同时从电源吸收电能,并产生且通过旋转磁场把电能转换成转子上的机械能,所以与直流电机不同,交流电机定子是电枢。另外,定.转子之间还必须有一定间隙(称为空气隙),以保证转子的自由转动。异步电动机的空气隙较其他类型的电动机气隙要小,一般为
0.2mm~2mm。 三相异步电动机外形有开启式.防护式.封闭式等多种形式,以适应不同的工作需要。在某些特殊场合,还有特殊的外形防护型式,如防爆式.潜水泵式等。不管外形如何电动机结构 基本上是相同的。现以封闭式电动机为例介绍三相异步电动机的结构。如图1所示是一台封闭式三相异步电动机解体后的零部件图。 1.定子部分 定子部分由机座.定子铁心.定子绕组及端盖.轴承等部件组成。 (1)机座。机座用来支承定子铁心和固定端盖。中.小型电动机机座一般用铸铁浇成,大型电动机多采用钢板焊接而成。 (2)定子铁心。定子铁心是电动机磁路的一部分。为了减小涡流和磁滞损耗,通常用0.5mm厚的硅钢片叠压成圆筒,硅钢片表面的氧化层(大型电动机要求涂绝缘漆)作为片间绝缘,在铁心的内圆上均匀分布有与轴平行的槽,用以嵌放定子绕组。
(a)直条形式(b)斜条形式 图2 笼型异步电动机的转子绕组形式 (3)定子绕组。定子绕组是电动机的电路部分,也是最重要的部分,一般是由绝缘铜(或铝)导线绕制的绕组联接而成。它的作用就是利用通入的三相交流电产生旋转磁场。通常,绕组是用高强度绝缘漆包线绕制成各种型式的绕组,按一定的排列方式嵌入定子槽内。槽口用槽楔(一般为竹制)塞紧。槽内绕组匝间.绕组与铁心之间都要有良好的绝缘。如果是双层绕组(就是一个槽内分上下两层嵌放两条绕组边),还要加放层间绝缘。 (4)轴承。轴承是电动机定.转子衔接的部位,轴承有滚动轴承和滑动轴承两类,滚动轴承又有滚珠轴承(也称为球轴承),目前多数电动机都采用滚动轴承。这种轴承的外部有贮存润滑油的油箱,轴承上还装有油环,轴转动时带动油环转动,把油箱中的润滑油带到轴与轴承的接触面上。为使润滑油能分布在整个接触面上,轴承上紧贴轴的一面一般开有油槽。
动态系统建模仿真 实验报告 姓名: 学号: 联系方式:(Tel) (Email)
2010年11月11日
目录 1直流电动机建模及仿真实验 (1) 1.1实验目的 .............................................................................................................. 1 1.2实验设备 .............................................................................................................. 1 1.3实验原理及实验要求 .......................................................................................... 1 1.3.1实验原理 ....................................................................................................... 1 1.3.2实验要求 ....................................................................................................... 2 1.4实验内容及步骤 .................................................................................................. 3 1.4.1求电动机的传递函数模型和频率特性 ....................................................... 3 1.4.2设计Simulink 框图求电机的调速特性 ....................................................... 5 1.4.3设计Simulink 框图求电机的机械特性 ....................................................... 7 1.4.4求电机转速的阶跃响应和机电时间常数 ................................................... 8 1.5实验结果分析 . (10) 2考虑结构刚度时的直流电动机-负载建模及仿真实验 (11) 2.1实验目的 ............................................................................................................ 11 2.2实验设备 ............................................................................................................ 11 2.3实验原理及实验要求 ........................................................................................ 11 2.3.1实验原理 ..................................................................................................... 11 2.3.2实验要求 ..................................................................................................... 13 2.4实验内容及步骤 ................................................................................................ 13 2.4.1求从a u 到m θ的传递函数模型和频率特性 ................................................ 13 2.4.2求从m θ到L θ的传递函数模型、频率特性和根轨迹 ............................... 15 2.4.3求不同刚度系数对应的从a u 到L θ的电机-负载模型的频率特性 ........... 17 2.5实验结果分析 . (18)