文章编号:025827025(2006)022*******
一种复合编码的三维数字成像方法
田劲东,彭 翔
(深圳大学光电子学研究所教育部光电子器件与系统重点实验室,广东深圳518060)
摘要 为了解决物体表面存在不连续或大梯度的三维数字化问题,提出了一种结合点阵编码和条纹编码两种方式的复合编码三维数字成像方法。该方法综合了点阵编码和条纹编码两种编码方式的优点,利用点阵编码三维数字成像绝对测量的特点,以点阵编码获取物体较低分辨率的三维深度像,并以此确定条纹级次,控制条纹解码的相位展开过程。建立了基于这种复合编码方法的三维数字成像理论模型,并通过实验验证了该方法可有效地克服相位模糊和误差传播问题,同时该方法的物体深度测试范围和测试对象范围均大于单一编码方式。关键词 成像系统;三维数字成像;复合编码;深度图像;轮廓测量中图分类号 TP 911.73 文献标识码 A
Approach for Three 2Dimensional Imaging B ased on H ybrid Encoding
TIAN Jin 2dong ,PEN G Xiang
(I nstitute of O ptoelect ronics ,S henz hen Universit y ,Key L aboratory of
O ptoelect ronic Devices and S ystems of Education M inist ry ,S henz hen ,Guang dong 518060,China )
Abstract A novel three 2dimensional (3D )imaging method based on hybrid encoding is proposed to solve the 3D
profilometry of objects surface with large height discontinuities and/or with very steep slope.By taking advantage of both point 2array encoding method and f ringe encoding method a hybrid encoding technique is constructed in which the point 2array encoding method is used firstly to get range image ,decide the f ringe order ,and control the f urther phase unwrapping processing.A theoretical model of 3D reconstruction based on the hybrid encoding is established.The experimental results are presented to demonstrate that the problem of the phase ambiguity and the error propagation can be avoided with proposed method.With proposed method ,the range of height of tested object surface and class of surfaces can be extended compared with single encoding method.K ey w ords imaging system ;three 2dimensional digital imaging ;hybrid encoding ;range image ;profilometry
收稿日期:2005205225;收到修改稿日期:2005209208
基金项目:国家自然科学基金(60275012),广东省自然科学基金(031804,04300864)和深圳市科技计划(200341)资助项目。
作者简介:田劲东(1973—),男,河北人,深圳大学光电子学研究所副研究员,博士,主要从事现代光学测试、三维数字成像
及造型、光电信息处理的研究。E 2mail :jindt @https://www.doczj.com/doc/1211718914.html,
1 引 言
光学三维数字成像技术随着计算机技术、光学和光电子技术的迅速发展,得到越来越广泛的应用[1~4]。目前,全场光学测量技术由于其非接触及高精度全场测量的特点而被广泛地应用于物理参量的检测。这些测量技术均是将物理参量以空间相位调制的方式编码在二维条纹图中。为了获得物理参量必须解调编码条纹图以提取相位分布的信息。相移算法[5]与傅里叶变换算法[6~8]是目前应用最广泛的两种主要的相位提取技术。众所周知,当被测物
体表面梯度较大或不连续时,由于相位模糊和误差传播,确定绝对相位是一个难题。可能的解决途径是发展具有灵敏度可变能力的编码照明理论及相应的处理技术,即需要利用不同灵敏度的多重相位图来确定物体表面间断处附近的相位从而得到相应的深度信息。两种有效的解决方法分别是Takeda 等提出的空间混频方法[9]和Huntley 等提出的时间相位展开方法[10,11]。空间混频方法采用两种空间频率条纹在不同方向上获取不同分辨率的相位图以重建物体表面间断处的相位信息,但它的测量范围仍受限于所采用条纹的频率;时间相位展开方法的基
第33卷 第2期2006年2月
中 国 激 光
C H IN ESE J OU RNAL O F L ASERS
Vol.33,No.2
February ,2006
本思想是采集一个时间序列条纹图,对每一像素沿着时间轴进行相位重建,但它的时间采样频率必须足够高,以保证两次采样之间没有相位模糊,带来的问题就是要采集多幅二维编码条纹图,从而增加了算法的时间复杂度。
文献[12]提出了一种基于空间位错点阵投影的三维数字成像方法,它采用点阵编码的方法,利用投射在参考平面和被测物体表面上的点阵中在成像面上横向位置变化实现被测物体深度的绝对测量。这也是一种全场光学测量方法,其特点是它不涉及相位映射,因此不存在相位模糊的问题。但它的空间分辨率有限,只能测量采样点处物体的深度值,必须通过位错点阵序列来获得高空间分辨率。
本文把点阵编码和条纹编码相结合提出一种复合编码实现三维数字成像的方法。首先,利用点阵编码三维数字成像是一种绝对测量的优点,以点阵编码获取物体较低分辨率的三维深度像,结合系统的结构参量,可计算出相应的相位绝对分布。再采集一幅条纹编码图,以点阵编码获取的物体绝对相位分布控制相位展开,用相位映射的方法进一步获取更精细的三维数字像。借助数字投影,复合编码可以由计算机方便地产生。这种方法在解决存在表面间断的物体或表面梯度很大的物体三维数字化的问题时具有显著效果,由于有效地克服了相位模糊和误差传播问题,也使得这种复合编码方法可测试的物体深度范围和测试对象范围均大于单一载波方法,并用实验验证了本文提出的方法的可行性。
2 基本原理
211 基于仿射变换的点阵编码三维数字成像文献[12]提出了基于空间点阵编码的三维数字成像方法,它采用点阵编码的方法,利用投射在参考平面和被测物体表面上的点阵中在成像面上横向位置变化实现被测物体深度的绝对测量,并给出了横向位置变化δx与物体深度z w之间的关系
z w=
L p(x0co sα-L c C+Cx0sinα)
C(x0sinα+L p cosα)+x0co sα-L p sinα
,
(1)
其中C定义为
C=δx
F
+
x0co sα
L c-x0sinα
;(2)
α为投影光轴和成像光轴之间的夹角;F为成像系统的焦距;L c为图像传感接收器的入瞳与照明场的中心之间的距离;L p为数字投影照明发射器的出瞳与照明场中心之间的距离;x0为投影在参考平面上的点在物坐标系x方向的坐标值;z w为投影在物体表面上的点在物坐标系z方向的坐标,即物体的深度值。x0和其他系统结构参量均为已知。因此只要确定各点在计算机图像坐标系中的横向位置差,就可根据式(1)计算物体深度像z w=h(x,y)。
在用点阵编码的方法获得物体的深度像后,再投射条纹图到被测物体表面,用条纹编码的方法获取它的相位分布。
212 基于相位映射的条纹编码三维数字成像条纹投影是将一组正弦结构照明光投射到被测物体表面,由于物体表面高度变化,投影条纹受到空间相位的调制从而发生形变[6]。变形条纹图的光强分布可以表示为
I(x,y)=a(x,y)+
b(x,y)?co s[2πf0x+φ(x,y)],(3)式中a(x,y)为背景光强分布,b(x,y)为条纹的局部对比度,f0为载波频率,φ(x,y)为与物体表面形状相关的相位因子。φ(x,y)可由相移或者傅里叶变换算法来计算其折叠相位分布,再通过相位展开的方法计算φ(x,y)的展开相位。
最后,利用相位分布与物体深度的映射关系得到物体的深度像。二者之间的关系可以表示为
h(x,y)=
L cφ(x,y)
φ(x,y)-2πf0d0,(4)式中d0表示图像传感接收器的入瞳与数字投影照明发射器的出瞳之间的距离。但是在相位展开过程中,如果被测物体表面梯度较大或不连续时,由于相位模糊和误差传播的存在,使得相位展开变得非常困难。本文正是针对这一问题,提出了利用点阵编码获取的物体绝对相位分布控制相位展开的方法。213 基于控制点的相位展开
由点阵编码的方法获得了物体的深度值,虽然分辨率较低,但仍然从较粗的分辨层次上反映了物体深度的真实分布。如果结构参量已知,条纹的空间频率已知,可以利用式(4)把物体的深度值映射为相应的相位值,需要强调的是,此时计算出的相位值是绝对相位。
对载波条纹图进行相位展开时利用点阵编码获得的绝对相位值作为“控制点”来控制相位展开的过程,可以达到去除相位模糊的目的。步骤如下:设由点阵编码方法获得的物体深度值分布为h(x,y),由式(4)计算得到的物体绝对相位分布为
φ
h
(ml x,nl y),假设投影点阵为M×N,那么m=1,
261中 国 激 光 33卷
2,…,M;n=1,2,…,N。其中l x,l y分别为横向和纵向的采样间隔。把这些离散点的绝对相位值作为控制点控制相位展开的过程。
由条纹编码方法获得的物体折叠相位分布为φ
w
(x,y),物体的展开相位分布为φu(x,y),则
φ
w
(x,y)=φw(i,j),
i=1,2,…,K;j=1,2,…,L
φ
u
(x,y)=φw(x,y)+2kπ,(5)其中K×L为图像大小。下面的问题就是如何确定条纹级次k。
2.3.1 获得折叠相位图上控制点处的绝对相位值
以点φh(l x,l y)为起点,先计算折叠相位图中在控制点处的绝对相位值。比较折叠相位图中控制点处折叠相位值和由点阵获得的该点处的相位值的差别
k h(ml x,nl y)=
N IN T φ
h
(ml x,nl y)-φw(ml x,nl y)
2π,
(6)
其中等式右边N IN T[…]项为四舍五入运算。设此时获得的相位分布为φp u,上标p表示控制点处的绝对相位分布
φp
u
(ml x,nl y)=φw(ml x,nl y)+2k h(ml x,nl y)π。
(7) 2.3.2 控制点→控制线
以φp u(l x,l y)为起点,沿列向控制点构成的网格线进行相位展开。比较相邻控制点之间的相位差
k c=N IN T φp
u[ml x,(n+1)l y]-φp u(ml x,nl y)
2π
。
(8)
1)如果k c等于0,则表示没有相位跳变,直接进行相位展开,设此时获得的相位分布为φl u,上标l 表示控制线的绝对相位分布
φl
u
(ml x,j)=φw(ml x,j)+2k h(ml x,nl y)π,
j∈[nl y,(n+1)l y]。(9)
2)如果k c不等于0,则表示有相位跳变:
a)相位图φp u上相邻控制点之间有边缘(跳变临界点T),则根据相位差的大小,修正φw值:
i.对点(ml x,nl y)与跳变临界点T之间的点
φl
u
(ml x,j)=φw(ml x,j)+2k h(ml x,nl y)π。
(10) ii.对跳变临界点T与点[ml x,(n+1)l y]之间的点
φl
u
(ml x,j)=φw(ml x,j)+2k h[ml x,(n+1)l y]π。
(11)
b)相位图φp u上相邻控制点之间没有边缘,说明在折叠相位图上这两点之间的相位正好差2kπ,则对沿列方向相邻控制点之间各点的相位直接做插值运算,由此获得给定行的“控制线”。
2.3.3 控制线→绝对相位分布面
依上述原则处理所有行,得到所有控制点所在行的相位展开“控制线”,也就获得了在“控制线”上所有的点的绝对相位分布。在行方向上,利用相邻“控制线”上的点,对未处理区域进行逐行相位展开,将会得到由控制点所构成区域的一个封闭表面,在这个面上所有点的相位值均为其绝对相位值。处理过程为:
比较控制线上各点的相位与相应折叠相位之间的相位差
k c1=NINT
φl
u
(ml x,j)-φw(ml x,j)
2π
k c2=NINT
φl
u[(m+1)l x,j]-φw[(m+1)l x,j]
2π
,
(12)其中j∈(l y,N l y)。
1)如果k c1=k c2,则表示没有相位跳变,直接进行相位展开,设此时获得的相位分布为φs u,上标s表示由控制点包围区域的绝对相位分布
φs
u
(i,j)=φw(i,j)+2k c1(ml x,j)π,(13)其中i∈[ml x,(m+1)l x]。
2)如果k c1≠k c2,则表示有相位跳变:
a)相位图φl u上相邻控制点之间有边缘(跳变临界点T),则根据相位差的大小,修正φw值:
i.对于点(ml x,j)与跳变临界点T之间的点
φs
u
(i,j)=φw(i,j)+2k c1(ml x,j)π。(14) ii.对于跳变临界点T与点[(m+1)l x,j]之间的点
φs
u
(i,j)=φw(i,j)+2k c2[(m+1)l x,j]π。
(15)
b)没有边缘,说明正好差2kπ,则对沿行方向相邻控制线上各点的相位直接做插值运算。
2.3.4 获得整个平面的相位分布
上述过程处理后,获得了控制点所确定区域上的绝对相位分布。对该区域以外的点,以此区域边界上的点为基准向外进行相位展开,以获得整个平面的展开相位φu(x,y)。
3 实验结果与讨论
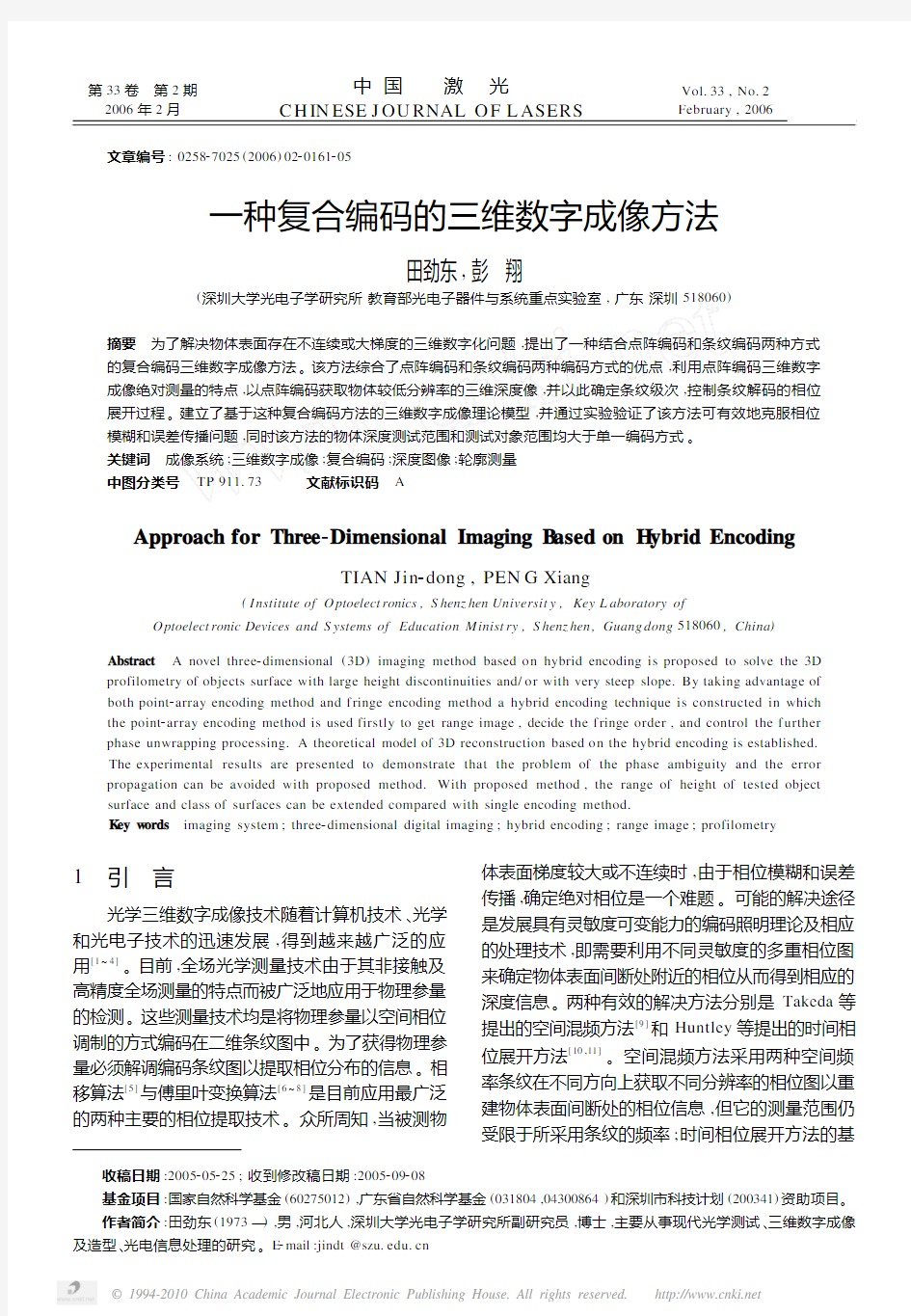
复合编码三维数字成像系统的结构示意图如图
361
2期 田劲东等:一种复合编码的三维数字成像方法
1所示。它由数字投影仪,CCD 相机和计算机组成。
数字投影仪采用的是DMD (Digital Micro 2mirror Device )数字投影设备(Benq 2115),它所需的二维空间点阵和条纹由计算机产生;CCD 相机采用的是J VC T K 2C1481B EC ,它采集到的点阵像通过图像采集卡送到计算机
。
图1复合编码三维数字成像系统结构示意图
Fig.1Schematic of 3D digital imaging system
with hybrid
encoding
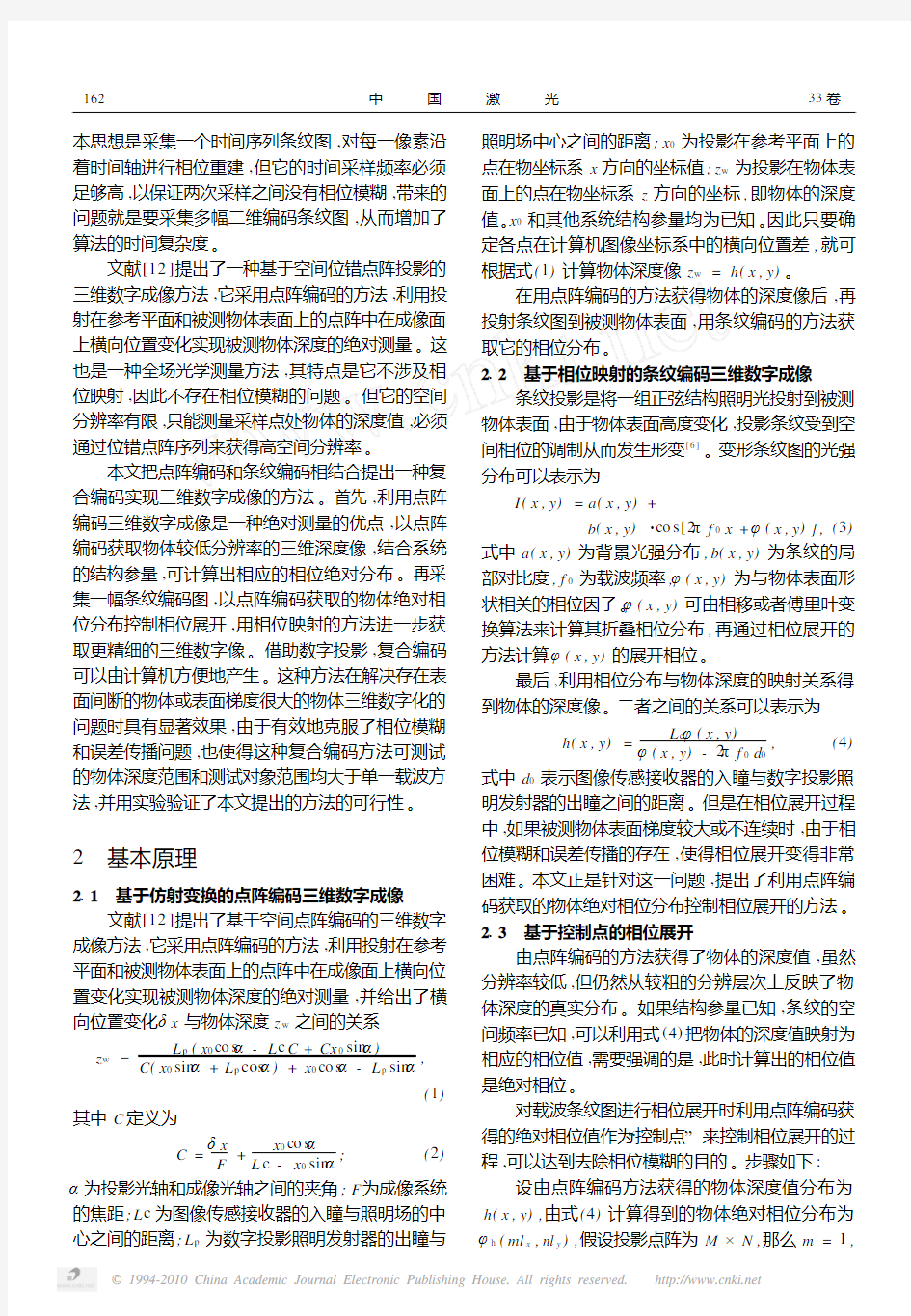
图2三维测量结果
(a )被测物体;(b )点阵像;(c )用点阵编码方法获得的物体深度
像;(d )条纹像;(e )用通常的相位展开算法得到的物体深度像; (f )用复合编码方法获得的物体深度像
Fig.23D sensing results
(a )object image ;(b )point 2array image ;(c )range image of (b );(d )deformed fringe image ;(e )range image of (d )wit h conventional phase unwrapping ;(f )range image obtained by
hybrid encoding
图2是一个台阶状物体上放置了一个石膏脸部
模型所构成的组合物体的实际测量结果。是一个大梯度表面物体和自由曲面物体的组合,并且台阶状
物体为90°台阶,可以看作表面不连续曲面,同时石膏脸部模型放置在较低台阶物体上,构成了存在分立物体的场景,使被测物体更广义,更有代表性。图
2(a )为被测物体的图像,图中放置石膏脸部模型的较低台阶状物体的高度为48mm ,较高台阶状物体的高度为70mm 。图2(b )为物体被点阵结构光照明的图像。采用的是32×32点阵,点阵图大小为512×512像素。图2(c )为利用点阵编码方法获得的物体深度像,由图2(c )得到的台阶状物体的高度分别为48118mm 和701531mm ,与真实结果基本相符,如图所示虽然分辨率较低,但它却反映了物体绝对相位的真实分布;图2(d )为该台阶状物体被条纹结构光照明的变形条纹图,条纹图的空间频率为
012line/mm 。由于被测的组合物体表面存在很大的
梯度变化,并且台阶高度均大于与所投射条纹的等效波长,存在相位模糊,使得利用通常的相位展开算法无法得到正确的绝对相位分布,如图2(e )所示,利用通常的相位展开算法计算出的台阶状物体深度值分别为7143mm 和-8147mm ,与实际结构完全不符;而且由于误差传播,在石膏脸部模型右侧形成一个很明显的错误区域。利用本文所提出的复合编码的方法来计算物体的深度像,结果如图2(f )所示,其中台阶状物体深度测得的结果分别为48146mm 和70124mm ,与实际结果也是基本相符
的。
4 结 论
理论和实验证明,本文提出的方法不仅可以消除相位模糊和误差传播问题,而且还提高了测量结果的置信度。它特别适合于大梯度表面,或表面不连续曲面,或场景内存在分立物体的一类更为广义的表面形状测量。
参考文献
1 Frank Chen ,G ordon M.Brown ,Mumin Song.Overview of
t hree 2dimensional shape measurement using optical met hods [J ].Opt.Eng.,2000,39(1):10~22
2 Peng Xiang ,Zhang Zonghua ,Zhu Shaoming et al..3D digital
imaging system based on white 2light digital Moire [J ].Acta Optica S inica ,1999,19(10):1401~1405 彭 翔,张宗华,朱绍明等.基于白光数字莫尔的三维光学数
字成像系统[J ]1光学学报,1999,19(10):1401~1405
3 Xu Zhiqin ,Sun Changku ,Zheng Y izhong.Structure
Parameters ′Optimization design of t he color 3D laser scanning measurement system [J ].Chinese J .Lasers ,2003,30(9):839~842 许智钦,孙长库,郑义忠.彩色三维激光扫描系统结构参量的优
461中 国 激 光 33卷
化设计[J ]1中国激光,2003,30(9):839~842
4 Xiang Peng ,Zonghua Zhang ,Hans J.Tiziani.32D imaging and
modeling —Part Ⅰ:acquisition and registration [J ].Optik ,2002,113(10):448~4525 J.H.Bruning ,D.R.Herriott ,J. E.Gallagher et al..Digital
wavefront measuring interferometer for testing optical surfaces
and lenses [J ].A p pl.Opt.,1974,13:2693~27036 M.Takeda ,K.Mutoh.Fourier transform profilometry for t he
automatic measurement of 32D object shapes [J ].A p pl.Opt.,1983,22(24):3977~39827 Chen Wenjing ,Su Xianyu ,Cao Y iping et al..New met hod to
eliminate extension of zero component in F TP [J ].Chinese J .Lasers ,2004,31(6):740~744 陈文静,苏显渝,曹益平等.傅里叶变换轮廓术中抑制零频的
新方法[J ].中国激光,2004,31(6):740~744
8 Weng Jiawen ,Zhong Jingang.Application of dilating Gabor
transform to t hree 2dimensional shape analysis [J ].Acta O ptica S inica ,2004,24(6):725~729
翁嘉文,钟金钢.伸缩窗口傅里叶变换在三维形貌测量中的应
用[J ]1光学学报,2004,24(6):725~7299 M.Takeda ,Q.Gu ,M.K inoshita et al..Frequency 2multiplex
Fourier 2transform profilometry :a single 2shot t hree 2dimensional
shape measurement of object wit h large height discontinuities and/or surface isolations [J ].A p pl.Opt.,1997,36(22):5347~535410 J.M.Huntley ,H.O.Saldner.Temporal phase 2unwrapping
algorit hm for automated interferogram analysis [J ].A p pl.Opt.,1993,32(17):3047~3052
11 H.O.Saldner ,J.M.Huntley.Temproal phase unwrapping :
application to surface profiling of discontinuous object s [J ].A p pl.Opt.,1997,36(13):2770~2775
12 Tian Jindong ,Peng Xiang.Approach for t hree 2dimensional
digital imaging via position 2shift point array projection [J ].Acta Optica S inica ,2005,25(10):1319~1323 田劲东,彭 翔.位错点阵投影的三维数字成像[J ]1光学学报,
2005,25(10):1319~1323
中国光学学会2006年学术大会的通知2006’G eneral Congress of Chinese Optical Society
会议时间:2006年9月3~5日
会议地点:中国?广州
主办单位:中国光学学会
承办单位:华南师范大学,广东省光学学会展馆地点:中国?深圳(2006年9月6~9日)
协办单位:清华大学精密测试技术及仪器国家重点实验室,广州光学学会,深圳光学学会,中国光学学会国际会议展览工作委员会,中国国际光电博览会(深圳),广州光学光电子行业协会,深圳光学光电子行业协会
会议宗旨:两年一次的中国光学学会年会,将于2006年9月3~5日在广州举行。由华南师范大学和广东省光学学会具体承办。本次会议将总结交流我国光学、光子学和工程光学领域的最新成果,展望21世纪的发展方向,为新老学者提供探讨新思想、交流新技术的讲台,促进本领域的科技创新和成果转化。本次会议将与光学、光电子新技术和新产品大型国际展览会———中国国际光电博览会及中国光电产业高级论坛同期举行。
会议名誉主席:王大珩(中国科学院)会议主席:母国光(南开大学)
节目委员会主席:金国藩(清华大学)
组织委员会主席:刘颂豪(华南师范大学)大会秘书长:邢 达(华南师范大学)
大会安排15个专题会议(分会场):1)量子光学与非线性光学,2)生物与医学光学,3)激光物理与技术,4)光学功能材料,5)集成光子学与光纤光学,6)光通信与光传感,7)光学存储与光全息,8)工程光学与光学制造,9)光电技术与系统,10)光学薄膜技术,11)超快光学,12)光学微系统与微纳米技术,13)颜色光学、眼(科)光学和仪器,14)激光加工技术,15)光学教学研究
会议论文提交截止时间:2006年6月15日(论文提交请见会议网站及第二轮通知)
承办单位地址:广州市华南师范大学信息光电子科技学院,邮政编码:510631
电话:+862020239310309,+862020285216848,传真:+862020239310311,联系人:崔红丽,罗爱平电子邮箱:guangd @https://www.doczj.com/doc/1211718914.html, (崔红丽),luoaiping2003@https://www.doczj.com/doc/1211718914.html, (罗爱平)
本会议建立了会议网页,网址为:http ://https://www.doczj.com/doc/1211718914.html,/final/index2.ht m 。敬请访问浏览,了解会议细节和相关的最新信息。
5
61 2期 田劲东等:一种复合编码的三维数字成像方法
旋转编码器的原理及其应用 摘要:本文介绍了常用编码器的原理、分类以及其应用的注意事项,并以德国P+F公司的编码器产品为参照,重点介绍了增量型编码器和绝对值型编码器的原理及应用,其中绝对值型编码器中以格雷码为主作了详细的介绍。 关键词:编码器增量型绝对值格雷码 一、前言 在自动化领域,旋转编码器是用来检测角度、速度、长度、位移和加速度的传感器。依靠轴杆、齿轮、测量轮或绳缆的控制,线性的移动能被检测。编码器也把实际的机械参数值转换成电气信号,这些电气信号可以被计数器、转速表、PLC和工业PC处理。 二、功能原理 由玻璃或塑料制成的圆盘被分成透明和非透明的区域,如果一个光源固定在圆盘的一侧,光敏元件固定在另一侧,旋转的移动没有接触就可获得。如果一束光打在透明的区域,接收器接收到,产生脉冲,当光束被 黑色区域隔断式,不产生脉冲。发光二极管 通常用作光源,发光范围在红外线范围内, 光敏二极管或光敏晶体管作为接收器。(见 右图) 如果按照此原理没有其它功能加入的 话,仅能推论出圆盘在转动,旋转的感应或 绝对值位置不能被确定。 编码器根据它们的功能原理和机械形式 和安装系统有不同的区别。 1、功能原理 1.1增量型旋转编码器 轴的每圈转动,增量型编码器提供一定数量的脉冲,周期性的测量或者单位时间内的脉冲数可以用来测量移动的速度。如果在一个参考点后面脉冲数被累加,计算值就代表了转动角度或行程的参数。双通道编码器输出脉冲之间相差900。能使接收脉冲的电子设备接收轴的旋转感应信号,因此可用来实现双向的定位控制。另外,三通道增量型编码器每一圈产生一个称之为零位信号的脉冲。 旋转增量型编码器以转动时输出脉冲,通过计数设备来计算其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备计算并记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的产生结果出现后才能知道。 解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。在参考点以前,是不能保证位置的准确性的。为此,在工控中就有每次操作先找参考点,开机找零等方法。 这样的方法对有些工控项目比较麻烦,甚至不允许开机找零(开机后就要知道准确位置),于是就有了绝对编码器的出现。 1.2绝对值旋转编码器 绝对编码器光码盘上有许多道光通道刻线,每道刻线依次以2线、4线、8线、16线编排,这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n位绝对编码器。这样的编码器是由光电码盘的机械位置决定的,它不受停电、干扰的影响。特别是在定位控制应用中,绝对值编码器减轻了电子接收设备的计算任务,从而省去了复杂的和昂贵
从增量值编码器到绝对值编码器 旋转增量值编码器以转动时输出脉冲,通过计数设备来计算其位置,当编码器不动或停电时,依靠计数设备的内部记忆来记住位置。这样,当停电后,编码器不能有任何的移动,当来电工作时,编码器输出脉冲过程中,也不能有干扰而丢失脉冲,不然,计数设备计算并记忆的零点就会偏移,而且这种偏移的量是无从知道的,只有错误的生产结果出现后才能知道。 解决的方法是增加参考点,编码器每经过参考点,将参考位置修正进计数设备的记忆位置。在参考点以前,是不能保证位置的准确性的。为此,在工控中就有每次操作先找参考点,开机找零等方法。 这样的方法对有些工控项目比较麻烦,甚至不允许开机找零(开机后就要知道准确位置),于是就有了绝对编码器的出现。 绝对编码器光码盘上有许多道光通道刻线,每道刻线依次以2线、4线、8线、16线。。。。。。编排,这样,在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n位绝对编码器。这样的编码器是由光电码盘的机械位置决定的,它不受停电、干扰的影响。 绝对编码器由机械位置决定的每个位置是唯一的,它无需记忆,无需找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就去读取它的位置。这样,编码器的抗干扰特性、数据的可靠性大大提高了。 从单圈绝对值编码器到多圈绝对值编码器 旋转单圈绝对值编码器,以转动中测量光电码盘各道刻线,以获取唯一的编码,当转动超过360度时,编码又回到原点,这样就不符合绝对编码唯一的原则,这样的编码只能用于旋转范围360度以内的测量,称为单圈绝对值编码器。 如果要测量旋转超过360度范围,就要用到多圈绝对值编码器。 编码器生产厂家运用钟表齿轮机械的原理,当中心码盘旋转时,通过齿轮传动另一组码盘(或多组齿轮,多组码盘),在单圈编码的基础上再增加圈数的编码,以扩大编码器的测量范围,这样的绝对编码器就称为多圈式绝对编码器,它同样是由机械位置确定编码,每个位置编码唯一不重复,而无需记忆。
增量式编码器的A.B.Z 编码器A、B、Z相及其关系
TTL编码器A相,B相信号,Z相信号,U相信号,V相信号,W相信号,分别有什么关系? 对于这个问题的回答我们从以下几个方面说明: 编码器只有A相、B相、Z相信号的概念。 所谓U相、V相、W相是指的电机的主电源的三相交流供电,与编码器没有任何关系。“A相、B相、Z相”与“U相、V相、W相”是完全没有什么关系的两种概念,前者是编码器的通道输出信号;后者是交流电机的三 相主回路供电。 而编码器的A相、B相、Z相信号中,A、B两个通道的信号一般是正交(即互差90°)脉冲信号;而Z相是零脉冲信号。详细来说,就是——一般编码器输出信号除A、B两相(A、B两通道的信号序列相位差为90度)外,每转一圈还输出一个零位脉冲Z。 当主轴以顺时针方向旋转时,输出脉冲A通道信号位于B通道之前;当主轴逆时针旋转时,A通道信号则位于B通道之后。从而由此判断主轴是正转还是反转。 另外,编码器每旋转一周发一个脉冲,称之为零位脉冲或标识脉冲(即Z相信号),零位脉冲用于决定零位置或标识位置。要准确测量零位脉冲,不论旋转方向,零位脉冲均被作为两个通道的高位组合输出。由于通道之间的相位差的存在,零位脉冲仅为脉冲长度的一半。 带U、V、W相的编码器,应该是伺服电机编码器 A、B相是两列脉冲,或正弦波、或方波,两者的相位相差90度,因此既可以测量转速,还可以测量电机的旋转方向Z相是参考脉冲,每转一圈输出一个脉冲,脉冲宽度往往只占1/4周期,其作用是编码器自我校正用的,使得编码器在断电或丢失脉冲的 时候也能正常使用。 ABZ是编码器的位置信号,UVW是电机的磁极信号,一般用于同步电机; AB对于TTL/HTL编码器来说,AB相根据编码器的细分度不同,每圈有很多个,但Z相每圈只有一个; UVW磁极信号之间相位差是120度,随着编码器的角度转动而转动,与ABZ 之间可以说没有直接关系。 /#############################################################
增量式旋转编码器工作原理 增量式旋转编码器通过内部两个光敏接受管转化其角度码盘的时序和相位关系,得到其角度码盘角度位移量增加(正方向)或减少(负方向)。在接合数字电路特别是单片机后,增量式旋转编码器在角度测量和角速度测量较绝对式旋转编码器更具有廉价和简易的优势。 下面对增量式旋转编码器的内部工作原理(附图) A,B两点对应两个光敏接受管,A,B两点间距为 S2 ,角度码盘的光栅间距分别为S0和S1。 当角度码盘以某个速度匀速转动时,那么可知输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值相同,同理角度码盘以其他的速度匀速转动时,输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。如果角度码盘做变速运动,把它看成为多个运动周期(在下面定义)的组合,那么每个运动周期中输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。 通过输出波形图可知每个运动周期的时序为 A B 1 1 0 1 0 0 1 0 A B 1 1 1 0 0 0 0 1 我们把当前的A,B输出值保存起来,与下一个A,B输出值做比较,就可以轻易的得出角度码盘的运动方向, 如果光栅格S0等于S1时,也就是S0和S1弧度夹角相同,且S2等于S0的1/2,那么可得到此次角度码盘运动位移角度为S0弧度夹角的1/2,除以所消毫的时间,就得到此次角度码盘运动位移角速度。
S0等于S1时,且S2等于S0的1/2时,1/4个运动周期就可以得到运动方向位和位移角度,如果S0不等于S1,S2不等于S0的1/2,那么要1个运动周期才可以得到运动方向位和位移角度了。 旋转编码器只有增量型和绝对值型两种吗?这两种旋转编码器如何区分?工作原理有何不同? 只有增量型和绝对型 增量型只是测角位移(间接为角速度)增量,以前一时刻为基点.而绝对型测从开始工作后角位移量. 增量型测小角度准,大角度有累积误差 绝对型测小角度相对不准,但大角度无累积误差 旋转编码器是用来测量转速的装置。它分为单路输出和双路输出两种。技术参数主要有每转脉冲数(几十个到几千个都有),和供电电压等。单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组相位差90度的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。 编码器的原理: 编码器的原理与应用 编码器是一种将角位移转换成一连串电数字脉冲的旋转式传感器,这些脉冲能用来控制角位移,如果编码器与齿条或螺旋杆结合在一起,也可于控制直线位移。 编码器中角位移的转换采用了光电扫描原理。读数系统是基于径向分度盘的旋转,该分度盘是由交替的透光窗口和不透光窗口构成的。此系统全部用一个红外光源垂直照射,这样光就把盘子和图像投射到接收器表面上,该接收器覆盖着一层光栅,称为准直仪,它具有和光盘相同的窗口。接收器的工作是感受光盘转动所产生的光变化,然后将光变化转换成相应的电变化。 增量型编码器 增量型编码器一般给出两种方波,它们的相位差90度,通常称为通道A和通道B。只有一个通道的读数给出与转速有关的信息,与此同时,通过所取得的第二通道信号与第一通道信号进行顺序对比的基础上,得到旋转方向的信号。还有一个可利用的信号称为Z通道或零通道,该通道给出编码器轴的绝对零位。此信号是一个方波,其相位与A通道在同一中心线上,宽度与A通道相同。 增量型编码器精度取决于机械和电气的因素,这些因素有:光栅分度误差、光盘偏心、轴承偏心、电子读数装置引入的误差以及光学部分的不精确性,误差存在于任何编码器中。 编码器如以信号原理来分,有增量型编码器,绝对型编码器。增量型编码器(旋转型) 工作原理: 由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向 ,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。 由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。 编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
旋转编码器的原理及应用 旋转编码器是用来测量转速的装置。它分为单路输出和双路输出两种。技术参数主要有每转脉冲数(几十个到几千个都有),和供电电压等。单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组相位差90度的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。 什么是光电编码器? 工作原理:当光电编码器的轴转动时A、B两根线都产生脉冲输出,A、B两相脉冲相差90度相位角,由此可测出光电编码器转动方向与电机转速。如果A相脉冲比B相脉冲超前则光电编码器为正转,否则为反转.Z 线为零脉冲线,光电编码器每转一圈产生一个脉冲.主要用作计数。A线用来测量脉冲个数,B线与A线配合可测量出转动方向. N为电机转速Δn=ND测-ND理 例如:我们车的速度为1.5m/s,轮子的直径220mm,C=D*Pi,电机控制在21.7转/秒,根据伺服系统的指标, 设电机转速为1500转/分,故可求得当ND=21.7*60=130转/分时,光码盘每秒钟输出的脉冲数为: PD=130×600/60=1300个脉冲 当测出的脉冲个数与计算出的标准值有偏差时,可根据电压与脉冲 个数的对应关系计算出输出给伺服系统的增量电压△U,经过D/A转换,再计算出增量脉冲个数,等下减去。 当运行时间越长路线越长,离我们预制的路线偏离就多了。这时系统起动位置环,通过不断测量光电编码器每秒钟输出的脉冲个数,并与标准值PD(理想值)进行比较,计算出增量△P并将之转换成对应的D/A 输出数字量,通过控制器减少输个电机的脉冲个数,在原来输出电压的基础上减去增量,迫使电机转速降下来,当测出的△P近似为零时停止调节,这样可将电机转速始终控制在允许的范围内。
案例五旋转编码器的安装与应用 1.项目训练目的 掌握旋转编码器的安装与使用方法。 2.项目训练设备 旋转编码器及相应耦合器一套。 3.项目训练内容 先熟悉旋转编码器的使用说明书。 (1)旋转编码的安装步骤及注意事项 ①安装步骤: 第一步:把耦合器穿到轴上。不要用螺钉固定耦合器和轴。 第二步:固定旋转编码器。编码器的轴与耦合器连接时,插入量不能超过下列值。 E69-C04B型耦合器,插入量 5.2mm;E69-C06B型耦合器,插人量 5.5mm;E69-Cl0B型耦合器,插入量7.lmm。 第三步:固定耦合器。紧固力矩不能超过下列值。E69-C04B型耦合器,紧固力矩2.0kfg?cm;E69-C06B型耦合器,紧固力矩 2.5kgf?cm;E69B-Cl0B型耦合器,紧固力矩4.5kfg?cm。 第四步:连接电源输出线。配线时必须关断电源。 第五步:检查电源投入使用。 ②注意事项: 采用标准耦合器时,应在允许值内安装。如图5-1所示。 图5-1 标准耦合器安装 连接带及齿轮结合时,先用别的轴承支住,再将旋转编码器和耦合器结合起来。如图 5-2所示。 图5-2 旋转编码器安装 齿轮连接时,注意勿使轴受到过大荷重。 用螺钉紧固旋转编码器时,应用5kfg?cm左右的紧固力矩。 固定本体进行配线时,不要用大于3kg的力量拉线。 可逆旋转使用时,应注意本体的安装方向和加减法方向。 把设置的装置原点和编码器的Z相对准时,必须边确定Z相输出边安装耦合器。 使用时勿使本体上粘水滴和油污。如浸入内部会产生故障。 (2)配线及连接
①配线应在电源0FF状态下进行。电源接通时,若输出线接触电源线,则有时会损坏输出回路。 ②若配线错误,则有时会损坏内部回路,所以配线时应充分注意电源的极性等。 ③若和高压线、动力线并行配线,则有时会受到感应造成误动作或损坏。 ④延长电线时,应在10m以下。还由于电线的分布容量,波形的上升、下降时间会延长,所以有问题时,应采用施密特回路等对波形进行整形。 还有为了避免感应噪声等,也要尽量用最短距离配线。集成电路输人时,要特别注意。 ⑤电线延长时,因导体电阻及线间电容的影响。波形的上升、下降时间变长,容易产 生信号间的干扰(串音),因此应使用电阻小、线间电容低的电线(双绞线、屏蔽线)。
感冒 证候分类 风寒束表风热犯表 暑湿袭表咳嗽 证候分类风寒袭肺风热犯肺燥邪伤肺痰热壅肺肝火犯肺痰湿蕴肺肺阴亏虚 肺气亏虚风温肺热病 风热犯肺痰热壅肺肺胃热盛热闭心包气阴两虚 邪陷正脱肺痈 初期 成痈期 溃脓期 恢复期 肺痨 肺阴亏虚阴虚火旺气阴两虚 阴阳两虚咯血 肝火犯肺阴虚火旺 痰热壅肺 气虚血瘀 悬饮 邪郁少阳 饮停胸胁 肺络不畅 喘病 风寒束肺 风热犯肺 痰湿蕴肺 水气凌心 肺脾两虚 肺肾两虚 哮病 .1发作期 1冷哮: 2热哮: 3虚哮: 2缓解期 1肺气亏虚 2脾气亏虚 3肾气亏虚 胃脘痛 肝胃气滞 寒邪犯胃 胃热炽盛 食滞胃肠 瘀阻胃络 胃阴亏虚 脾胃虚寒 噎膈 痰气阻膈 瘀血阻膈 津亏热结 气虚阳微 呕吐 寒邪犯胃 食滞胃肠 痰饮停胃 肝气犯胃 脾胃虚寒 胃阴亏虚 吐血 胃热炽盛 肝火犯胃 瘀阻胃络 脾不统血 肝胃阴虚 便血 胃肠积热 湿热蕴结 肠风伤络 脾胃虚寒 痢疾 湿热蕴结 寒湿困脾 脾阳亏虚 热毒炽盛 正虚邪恋 泄泻 寒湿困脾 肠道湿热 食滞胃肠 肝气郁滞 脾气亏虚 肾阳亏虚 黄疸 肝胆湿热
湿困脾胃 热毒炽盛寒凝阳衰水臌 气滞湿阻寒湿困脾湿热蕴结肝脾血瘀 脾肾阳虚肝肾阴虚便秘 肠道实热肠道气滞脾虚气弱 脾肾阳虚阴虚肠燥紫癜 风热伤络血热伤络 阴虚火旺气不摄血湿温 湿郁卫气 气分湿热热入营血霍乱 中焦湿热寒湿困脾 亡阴证亡阳证中暑 阳暑 阴暑 暑厥 暑风 疟疾邪郁少阳 暑热内郁 暑湿内蕴 疫毒侵袭 正虚邪恋 胸痹心痛 心血瘀阻 寒凝心脉 痰浊内阻 心气虚弱 心肾阴虚 心肾阳虚 心悸 心虚胆怯 心脾两虚 阴虚火旺 心血瘀阻 水气凌心 心阳虚弱 不寐 肝郁化火 痰热内扰 阴虚火旺 心脾两虚 心虚胆怯 自汗、盗汗 肺卫不固 营卫不和 阴虚火旺 郁病 肝气郁结 气郁化火 忧郁伤神 心脾两虚 癫病 痰气郁结 气虚痰结 心脾两虚 阴虚火旺 狂病 痰火扰神 火盛伤阴 气血瘀滞 痫病 痰火扰神 血虚风动 风痰闭窍 瘀阻脑络 心脾两虚 肝肾阴虚 头风 肝阳上亢 痰浊上扰 瘀阻脑络 气血亏虚 肝肾阴虚 眩晕 风阳上扰 痰浊上蒙 气血亏虚 肝肾阴虚 痿病 肺热津伤 湿热浸淫 脾胃虚弱 瘀阻脉络 肝肾亏虚 中风 肝阳暴亢 风痰阻络
CAD三维建模实例操作一-----创建阀盖零件的三维模型将下面给出的阀盖零件图经修改后,进行三维模型的创建。阀盖零件图如图1所示。 ●图形分析: 阀盖零件的外形由左边前端倒角30度的正六边体,右边四个角R=12mm的底座,中间有一个倒45度角和R=4mm连接左右两边。该零件的轴向为一系列孔组成。根据该零件的构造特征,其三维模型的创建操作可采用: (1)拉伸外轮廓及六边形; (2)旋转主视图中由孔组成的封闭图形; (3)运用旋转切除生成30度和45度、R4的两个封闭图形,生成外形上的倒角;(4)运用差集运算切除中间用旋转生成的阶梯轴(由孔组成的图形旋转而成),来创建该零件中间的阶梯孔,完成三维模型的创建。 如需室内设计学习指导请加QQ技术交流群:106962568 庆祝建群三周年之际,如今超级群大量收人!热烈欢迎大家! ●零件图如图1所示。
图1 零件图 具体的操作步骤如下: 1.除了轮廓线图层不关闭,将其他所有图层关闭,并且可删除直径为65mm的圆形。然后,结果如图2所示。 图2 保留的图形 2.修改主视图。将主视图上多余的线条修剪,如图3所示。 3.将闭合的图形生成面域。单击“绘图”工具条上的“面域”按钮,框选所有的视 图后,按回车键,命令行提示:已创建8个面域。
4.旋转左视图。单击“视图”工具条上的“主视”按钮,系统自动将图形在“主视平面”中显示。注意:此时,显示的水平线,如图4 a)所示。输入“RO”(旋转)命令,按回车键,再选择右边的水平线(即左视图)的中间点,输入旋转角度值90,按回车键,完成左视图的旋转如图4 b)所示。在轴测图中看到旋转后的图形如图4 c)所示。 图4 a)旋转前图4 b)放置后 提示:图中的红色中心线是绘制的, 用该线表明二视图的中心是在一条 水平线上。 图4 c)轴测视图 5.移动视图将两视图重合的操作如下: ①单击“视图”工具条上的“俯视”按钮,系统自动将图形转换至俯视图中,如图5所示。 图5 俯视图显示图6 标注尺寸 ②单击“标注”菜单,选择“线性”标注,标注出二图间的水平距离,如图6所示。标注尺寸的目的是便于将图形水平移动进行重合。
运行工作方式,机器大概情况, 机器共18个工位,每个工位为一个机器过程,一个工件为5米(误差1CM)要求用2000线的轴式旋转编码器通过PLC协调控制完成每个工件。 每个工位都有一个人,1个绿启动按钮。一个绿灯,1个红色急停按钮,1个红灯。当1号工人按1号启动按钮后1号指示灯亮,2号工人按2号启动按钮后2号指示灯亮,直到第18个工人都按启动按钮后18灯全亮,机器开始运转,自动运转到5米后停止。绿灯全灭(记米自动复位)等待18个工人下一次继续给18个运行信号后运行。(红色按钮为紧急停车按钮:当工件工作到一半时紧急停车,手动不复位情况下,8个工人动启动后机器可继续当前的米数运转。手动复位则重新开始) 当18个工人无论哪个工人按红色按钮时机器立即停机(此时红色指示灯全亮,红色按钮释放后指示灯全灭)机器再次启动需18个工人都给启动信号才能运行。18个红色按钮共用PLC一个点。如果点富裕的话18个红按钮分为3组,一组6个共用一个点,用3个点实现这个功能。变频器运行过程,当给变频器运行信号时变频器缓慢启动逐渐加速到高速,指定记米到达时变频器缓慢减速到低速运行,记米到达后变频器立即停止刹车,18个工位如果少几个工位的把那几个工位短接,要不影响工作。
程序分为3部分,主程序,指示灯输出,初始化。初始化中有两个中断程序,分别为当前值=设定值时中断以及复位时产生的中断。高速计数器HDEF的通道是HSC0,意思为编码器的A、B相接I0.0、I0.1,复位接在I0.2。事件号是10,意思是选择A/B正交计数器。中断ATCH的事件号12代表当前值=设定值时中断。事件号28代表HSC0当I0.2高电平时产生中断。 主程序:
充注小车、运载小车定位使用说明 定位原理: 旋转编码器定位与老式的旋转变压器一样,实际上是一个计数器。我们目前使用的OMRON旋转编码器每旋转一周,能精确地发出1024脉冲,PLC依据旋转编码器发出的脉冲进行计数,再乖以固定机械变比与旋转半径的系数,就可以得出脉冲与实际行走距离的线性对应关系。 PLC利用高速计数模块QD62D读取旋转编码器的值并进行数字化处理,可以将脉冲数值转换成实际的距离值如mm。 目前我们设备都是利用旋转编码器的原始值进行处理的,所有触模屏上的距离值均为脉冲值而非实际距离值,这样在处理数据时比较方便直观。 根据这一对应关系利用普通变频器控制一般的三相鼠笼电机就能实现精度在1毫米左右定位系统,可以在许多定位要求不高的控制领域使用。 使用方法: 依据上述原理,定位系统定位首先必须选择一个参考点,以这点作为基准点,其它所有设置点均为到这一点的相对距离。当基点信号取的不稳定或不好,就会影响整个定位过程。 旋转编码器由一个联轴器与一套齿轮机构组合成一套测量机构。由于齿轮与齿轮之间存在间隙,运行一段时间后就会有误差积累,造成定位不准,这时不要改变屏上设定数据,而是在运行机构运行一段时间后,让运行机构回到基点,进行一次清零,就可以消除积累误差。 旋转编码器定位机构的故障主要有定位不准、或运行数据无变化等等。 定位不准主要是由测量机构之间的间隙,联轴器、齿轮相对打滑。 一种定位不准就是干扰,现场已采用了一端接地的屏蔽等措施。出错时请严格检查测量线路(包抱QD62D联接器)有无断线、短路、屏蔽不严、模块供电电压不足等问题。 还有一种定位不准表现在:由于测量机构所能测量的最大频率不超过500KHz,因此对于变化速度太快脉冲系统不能及时测量,造成定位不准。因此系统要运行平稳,不能有速度突变。
伺服电机旋转编码器安装 一.伺服电机转子反馈的检测相位与转子磁极相位的对齐方式 1.永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐 其唯一目的就是要达成矢量控制的目标,使d轴励磁分量和q轴出力分量解耦,令永磁交流伺服电机定子绕组产生的电磁场始终正交于转子永磁场,从而获得最佳的出力效果,即“类直流特性”,这种控制方法也被称为磁场定向控制(FOC),达成FOC控制目标的外在表现就是永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,如下图所示: 图1 因此反推可知,只要想办法令永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,就可以达成FOC控制目标,使永磁交流伺服电机的初级电磁场与磁极永磁场正交,即波形间互差90度电角度,如下图所示: 图2 如何想办法使永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致呢?由图1可知,只要能够随时检测到正弦型反电势波形的电角度相位,然后就可以相对容易地根据电角度相位生成与反电势波形一致的正弦型相电流波形了。 在此需要明示的是,永磁交流伺服电机的所谓电角度就是a相(U相)相反电势波形的正弦(Sin)相位,因此相位对齐就可以转化为编码器相位与反电势波形相位的对齐关系;另一方面,电角度也是转子坐标系的d轴(直轴)与定子坐标系的a轴(U轴)或α轴之间的夹角,这一点有助于图形化分析。 在实际操作中,欧美厂商习惯于采用给电机的绕组通以小于额定电流的直流电流使电机转子定向的方法来对齐编码器和转子磁极的相位。当电机的绕组通入小于额定电流的直流电流时,在无外力条件下,初级电磁场与磁极永磁场相互作用,会相互吸引并定位至互差0度相位的平衡位置上,如下图所示:
摘要:从全国分层随机抽样确定的88所中医医院1994年12万余份出院病例中,遴选出78605份符合项目研究要求的病例,从中分析发现中医病、证诊断名5908个。通过对每一个病、证诊断所占有的病例量顺位列表分析获得了有代表性的全国中医医院住院患者中医病、证诊断分布资料;在此基础上以国家标准为规范描述了中医病、证诊断内涵联系的层次结构,揭示了中医病、证的属性组合规律与因果关系,为中医学提供了一个新的研究思路与方法。 关键词:国家标准;疾病分布;中医病证;诊断 Applied Research on the National Standards on“Classification & Code of TCM Symptoms and Signs" Zhang Ruhong(章如虹),Mao Shusong(毛树松),Shao Qihong(邵企红),et al. (National Chinese Medicine Hospitals Information Center, Hubei 43006 1) (Dept Of Medical Administration, State Administration of Traditional C hinese Me dicine, Beijing 100026) ABSTRACT: From the 88 traditional Chinese medicine (TCM) hospital s by random sampling from different grades, 78 605 out of more than 1 20 thousands of cases of discharged patients which conformed to the pr oje ct research requirements. By the analysis on the cases we found 5 908 diagnosis names of TCM symptoms and signs. In sequence we listed the numbers o f the cases occupied by each diagnosis, and then got a representative distributi on data of the diagnoses of TCM symptoms an d signs on the discharged TCM patient s. Taking the National Standards as rule, our research indicated the features, c ausality and combination regulations of TCM symptoms and signs. It suggested a new path of th e TCM research. KEY WORDS: Disease Distribution; TCM Symptoms and Signs; Diagnos is 1资料来源 本资料来源于1994年“全国中医医院病种质量管理现状调查”,该调查是依据卫生部“1993年国家卫生服务总调查”所采用的多变量分析方法,综合社会经济、文化、教育、卫生保健、人口结构等项指标,以县(市或市区)为单元,进
旋转编码器应用注意事项 有网友问:增量旋转编码器选型有哪些注意事项? 应注意三方面的参数: 1.械安装尺寸,包括定位止口,轴径,安装孔位;电缆出线方式;安装空间体积; 工作环境防护等级是否满足要求。 2.分辨率,即编码器工作时每圈输出的脉冲数,是否满足设计使用精度要求。 3.电气接口,编码器输出方式常见有推拉输出(F型HTL格式),电压输出(E), 集电极开路(C,常见C为NPN型管输出,C2为PNP型管输出),长线驱动器输出。其输出方式应和其控制系统的接口电路相匹配。 ■二.※有网友问:请教如何使用增量编码器? 1,增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计量,数目从 6到5400或更高,脉冲数越多,分辨率越高;这是选型的重要依据之一。 2,增量型编码器通常有三路信号输出(差分有六路信号):A,B和Z,一般采用 TTL电平,A脉冲在前,B脉冲在后,A,B脉冲相差90度,每圈发出一个Z脉冲,可作为参考机械零位。一般利用A超前B或B超前A进行判向,我公司增量型编码器定义为轴端看编码器顺时针旋转为正转,A超前B为90°,反之逆时针旋转为反转B超前A为90 °。也有不相同的,要看产品说明。 3,使用PLC采集数据,可选用高速计数模块;使用工控机采集数据,可选用高 速计数板卡;使用单片机采集数据,建议选用带光电耦合器的输入端口。 4,建议B脉冲做顺向(前向)脉冲,A脉冲做逆向(后向)脉冲,Z原点零位脉冲。 5,在电子装置中设立计数栈。 ■三.※关于户外使用或恶劣环境下使用 有网友来email问,他的设备在野外使用,现场环境脏,而且怕撞坏编码器。 我公司有铝合金(特殊要求可做不锈钢材质)密封保护外壳,双重轴承重载型 编码器,放在户外不怕脏,钢厂、重型设备里都可以用。 不过如果编码器安装部分有空间,我还是建议在编码器外部再加装一防护壳,以加 强对其进行保护,必竟编码器属精密元件,一台编码器和一个防护壳的价值比较还 是有一定差距的。 ■四.※从接近开关、光电开关到旋转编码器: 工业控制中的定位,接近开关、光电开关的应用已经相当成熟了,而且很好用 。可是,随着工控的不断发展,又有了新的要求,这样,选用旋转编码器的应用优 点就突出了: 信息化:除了定位,控制室还可知道其具体位置; 柔性化:定位可以在控制室柔性调整; 现场安装的方便和安全、长寿:拳头大小的一个旋转编码器,可以测量从几个 μ到几十、几百米的距离,n个工位,只要解决一个旋转编码器的安全安装问题,可 以避免诸多接近开关、光电开关在现场机械安装麻烦,容易被撞坏和遭高温、水气 困扰等问题。由于是光电码盘,无机械损耗,只要安装位置准确,其使用寿命往往 很长。 多功能化:除了定位,还可以远传当前位置,换算运动速度,对于变频器,步 进电机等的应用尤为重要。 经济化:对于多个控制工位,只需一个旋转编码器的成本,以及更主要的安装 、维护、损耗成本降低,使用寿命增长,其经济化逐渐突显出来。
附件3 中医疾病名称与分类代码表 代码中医疾病 分类名称 代码 中医疾病 分类名称 代码 中医疾病 分类名称 BN 内科病BNX050 多寐病BNP100 腹胀满病 BNF肺系病类BNX060 健忘病BNP110 泄泻病 BNF010 咳嗽病BNX070 癫狂病BNP111 暴泻病 BNF011 外感咳嗽病BNX071 癫病BNP120 吐血病 BNF012 内伤咳嗽病BNX072 狂病BNP130 便血病 BNF020 肺痿病BNX080 痫病BNP140 齿衄病 BNF030 肺痈病BNX090 昏迷病BNP150 紫癜病 BNF040 哮病BNX091 神昏病BNP160 痰饮病 BNF050 喘病BNX100 痴呆病BNP170 悬饮病 BNF051 暴喘病BNX110 抽搐病BNP180 溢饮病 BNF060 肺胀病BNX120 薄厥病BNP190 支饮病 BNF070 肺痨病BNX130 卒死病BNP000 脾系病(便秘病)BNF080 咯血病BNP 脾系病类BNG 肝系病类BNF090 鼻衄病BNP010 胃脘痛病BNG010 胁痛病 BNF100 失音病BNP020 胃痞病BNG020 黄疸病 BNF110 肺衰病BNP030 吐酸病BNG021 阴黄病 BNX 心系病类BNP040 反胃病BNG022 阳黄病 BNX010 心悸病BNP050 呕吐病BNG023 急黄病 BNX011 惊悸病BNP051 暴吐病BNG030 萎黄病 BNX012 怔忡病BNP060 呃逆病BNG040 积聚病 BNX020 胸痹心痛病BNP070 嘈杂病BNG041 积病 BNX021 卒心痛病BNP080 噎膈病BNG042 聚病 BNX030 心衰病BNP090 腹痛病BNG050 臌胀病 BNX040 不寐病BNP091 卒腹痛病BNG051 水臌病
旋转编码器的应用 例:E6C-N绝对型多旋转高精度型旋转编码器与CPM1A PLC连接进行定位控制 一、连接示意图 型号E6C-NN5C 型号CPM1A-40CD□-□ 二、配线表 【型号E6C-NN5C和型号CPM1A的配线】 型号E6C-NN5C输出信号型号CPM1A 输入信号 单旋转导线外皮褐(20) 00000 数据颜色橙(21) 00001 (灰)黄(22) 00002 绿(23) 00003 蓝(24) 00004 紫(25) 00005 灰(26) 00006 白(27) 00007 粉红(28) 00008 多旋转导线外皮茶(20) 00100 数据颜色橙(21) 00101 (黑)黄(22) 00102 绿(23) 00103 蓝(24) 00104 紫(25) 00105 符号+=0 灰(26) 00106 -=1 白(27) 00107 三、输出时间 【输出时间】 型号E6C-NN5C的绝对值数据 1旋转 2旋转 127旋转 63999
四、梯形图程序 000通道的0 接点,输送到 (单旋转数 BIN) BIN BCD 001通道的 0~7接点,输送 到DM0003(多旋转 数据BIN) BIN 转换到BCD BCD)× 500(单旋转分辨率) 的结果存入 DM0005~6 比较带在DM0010/11的值与DM0012/13 的值间在线性绝对值数据时,输出01000 接点。(限正旋转时进行带域比较)
五、DM设定 【DM设定】 DM0000 0001 0002 0000 数据程序用工作区域 0003 0004 0005 0006 0007 线性绝对值数据 0008 0009 比较数据 0010 9000 0011 0000 上限值设定 0012 0500 0013 0001 下限值设定 注:上述梯形程序为参考例,有时会因程序控制器的数据读入时间而产生数据读取错误。这时,比较上次读入的数据与当前读入的数据。若超过100以上,则该数据作废。(多旋转数据变化时,同时读入单旋转数据与多旋转数据,则错误的数据也被读入。
旋转编码开关(Rotary Encoder switch)-使用说明及程序 具有左转,右转,按下三个功能。4、5 脚是中间按下去的开关接线 1 2 3 脚一般是中间2 脚接地,1、3 脚上拉电阻后,当左转、右转旋纽时,在1、3 脚就有脉冲信号输出了。 着这是标准资料:
在单片机编程时,左转和右转的判别是难点,用示波器观察这种开关左转和右转时两个输出 脚的信号有个相位差,见下图: 由此可见,如果输出1 为高电平时,输出2 出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2 出现一个低电平,这时就一定是逆时针方向旋转. 所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时的状态就可以判断出是左 旋转或是右旋转了。 还有另外一种3 脚的,除了不带按钮开关外,和上面是一样的使用。
参考: #include "reg51.h" #define uint unsigned int sbit CodingsWitch_A=P1_1; sbit CodingsWitch_B=P1_2; uint CodingsWitchPolling()// { static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引 脚的电平 static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电 平的状态 uint tmp = 0; if(CodingsWitch_A&&CodingsWitch_B) st = 1; // if(st) //如果st 为1 执行下面的步骤 { if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关的两个引脚 都为底电平执行下面的步骤 { if(Bold) //为高说明编码开关在向加大的方向转 { st = 0; tmp++; // } if(Aold) //为高说明编码开关在向减小的方向转
旋转编码器的安装与应用 1.项目训练目的 掌握旋转编码器的安装与使用方法。 2.项目训练设备 旋转编码器及相应耦合器一套。 3.项目训练内容 先熟悉旋转编码器的使用说明书。 (1)旋转编码的安装步骤及注意事项 ①安装步骤: 第一步:把耦合器穿到轴上。不要用螺钉固定耦合器和轴。 第二步:固定旋转编码器。编码器的轴与耦合器连接时,插入量不能超过下列值。E69-C04B型耦合器,插入量5.2mm;E69-C06B型耦合器,插人量5.5mm;E69-Cl0B型耦合器,插入量7.lmm。 第三步:固定耦合器。紧固力矩不能超过下列值。E69-C04B型耦合器,紧固力矩2.0kfg·cm;E69-C06B 型耦合器,紧固力矩2.5kgf·cm;E69B-Cl0B型耦合器,紧固力矩4.5kfg·cm。 第四步:连接电源输出线。配线时必须关断电源。 第五步:检查电源投入使用。 ②注意事项: 采用标准耦合器时,应在允许值内安装。如图5-1所示。 图5-1 标准耦合器安装 连接带及齿轮结合时,先用别的轴承支住,再将旋转编码器和耦合器结合起来。如图5-2所示。 图5-2 旋转编码器安装 齿轮连接时,注意勿使轴受到过大荷重。 用螺钉紧固旋转编码器时,应用5kfg·cm左右的紧固力矩。 固定本体进行配线时,不要用大于3kg的力量拉线。 可逆旋转使用时,应注意本体的安装方向和加减法方向。 把设置的装置原点和编码器的Z相对准时,必须边确定Z相输出边安装耦合器。 使用时勿使本体上粘水滴和油污。如浸入内部会产生故障。 (2)配线及连接 ①配线应在电源0FF状态下进行。电源接通时,若输出线接触电源线,则有时会损坏输出回路。 ②若配线错误,则有时会损坏内部回路,所以配线时应充分注意电源的极性等。 ③若和高压线、动力线并行配线,则有时会受到感应造成误动作或损坏。 ④延长电线时,应在10m以下。还由于电线的分布容量,波形的上升、下降时间会延长,所以有问题时,应采用施密特回路等对波形进行整形。 还有为了避免感应噪声等,也要尽量用最短距离配线。集成电路输人时,要特别注意。 ⑤电线延长时,因导体电阻及线间电容的影响。波形的上升、下降时间变长,容易产生信号间的干扰(串音),因此应使用电阻小、线间电容低的电线(双绞线、屏蔽线)。
旋转编码器 旋转编码器是由光栅盘(又叫分度码盘)和光电检测装置(又叫接收器)组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光栅盘与电机同轴,电机旋转时,光栅盘与电机同速旋转,发光二极管垂直照射光栅盘,把光栅盘图像投射到由光敏元件构成的光电检测装置(接收器)上,光栅盘转动所产生的光变化经转换后以相应的脉冲信号的变化输出。 编码器码盘的材料有玻璃、金属、塑料等。玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高。金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性也比玻璃的差一个数量级。塑料码盘成本低廉,但精度、热稳定性、寿命均要差一些。 编码器以信号原理来分,有增量式编码器(SPC)和绝对式编码器(APC),顾名思义,绝对式编码器可以记录编码器在一个绝对坐标系上的位置,而增量式编码器可以输出编码器从预定义的起始位置发生的增量变化。增量式编码器需要使用额外的电子设备(通常是PLC、计数器或变频器)以进行脉冲计数,并将脉冲数据转换为速度或运动数据,而绝对式编码器可产生能够识别绝对位置的数字信号。综上所述,增量式编码器通常更适用于低性能的简单应用,而绝对式编码器则是更为复杂的关键应用的最佳选择--这些应用具有更高的速度和位置控制要求。输出类型取决于具体应用。 一:增量式旋转编码器工作原理 增量式旋转编码器通过两个光敏接收管来转化角度码盘的时序和相位关系,得到角度码盘角度位移量的增加(正方向)或减少(负方向)。
增量式旋转编码器的工作原理如下图所示。 图中A、B两点的间距为S2,分别对应两个光敏接收管,角度码盘的光栅间距分别为S0和S1。 当角度码盘匀速转动时,可知输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值相同,同理,当角度码盘变速转动时,输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。 通过输出波形图可知每个运动周期的时序为: 我们把当前的A、B输出值保存起来,与下一个到来的A、B输出值做比较,就可以得出角度码盘转动的方向, 如果光栅格S0等于S1时,也就是S0和S1弧度夹角相同,且S2等于S0的1/2,那么可得到此次角度码盘运动位移角度为S0弧度夹角的1/2,再除以所用的时间,就得到此次角度码盘运动的角速度。 S0等于S1时,且S2等于S0的1/2时,1/4个运动周期就可以得到运动方向位和位移角度,如果S0不等于S1,S2不等于S0的1/2,那么要1个运动周期才可以得到运动方向位和位移角度了。
. . 增量式编码器的工作原理与使用方法 1.工作原理 旋转编码器是一种采用光电等方法将轴的机械转角转换为数字信号输出的精密传感器,分为增量式旋转编码器和绝对式旋转编码器。 光电增量式编码器的工作原理如下:随转轴一起转动的脉冲码盘上有均匀刻制的光栅,在码盘上均匀地分布着若干个透光区段和遮光区段。 增量式编码器没有固定的起始零点,输出的是与转角的增量成正比的脉冲,需要用计数器来计脉冲数。每转过一个透光区时,就发出一个脉冲信号,计数器当前值加1,计数结果对应于转角的增量。 增量式编码器的制造工艺简单,价格便宜,有时也用来测量绝对转角。 2.增量式编码器的分类 1)单通道增量式编码器内部只有一对光电耦合器,只能产生一个脉冲序列。 2)AB相编码器内部有两对光电耦合器,输出相位差为90°的两组脉冲序列。正转和反转时两路脉冲的超前、滞后关系刚好相反。由下图可知,在B相脉冲的上升沿,正转和反转时A 相脉冲的电平高低刚好相反,因此使用AB相编码器,PLC可以很容易地识别出转轴旋转的方向。 需要增加测量的精度时,可以采用4倍频方式,即分别在A、B相波形的上升沿和下降沿计数,分辨率可以提高4倍,但是被测信号的最高频率相应降低。 3)三通道增量式编码器内部除了有双通道增量式编码器的两对光电耦合器外,在脉冲码盘的另外一个通道有1个透光段,每转1圈,输出1个脉冲,该脉冲称为Z相零位脉冲,用做系统清零信号,或坐标的原点,以减少测量的积累误差。 2.编码器的选型 首先根据测量要求选择编码器的类型,增量式编码器每转发出的脉冲数等于它的光栅的线数。在设计时应根据转速测量或定位的度要求,和编码器的转速,来确定编码器的线数。编码器安装在电动机轴上,或安装在减速后的某个转轴上,编码器的转速有很大的区别。还应考虑它发出的脉冲的最高频率是否在PLC的高速计数器允许的范围内。 3.编码器与PLC高速计数器的配合问题 以S7-200为例,使用单通道增量式编码器时,可选高速计数器的单相加/减计数器模式(模式0~5),可细分为有/无外部方向输入信号、有/无复位输入和有/无启动输入信号。 使用AB相编码器时,高速计数器应选A/B相正交计数器模式(模式9~11),可以实现在正转时加计数,反转时减计数。 4.怎样判断AB相编码器是正转还是反转? S7-200的高速计数器用SM区中的当前计数方向状态位来指示编码器的旋转方向。如果编码器输出脉冲的周期大于PLC的扫描循环时间的两倍,通过在B相脉冲的上升沿判断A相脉冲信号的0、1状态,可以判断编码器旋转的方向。