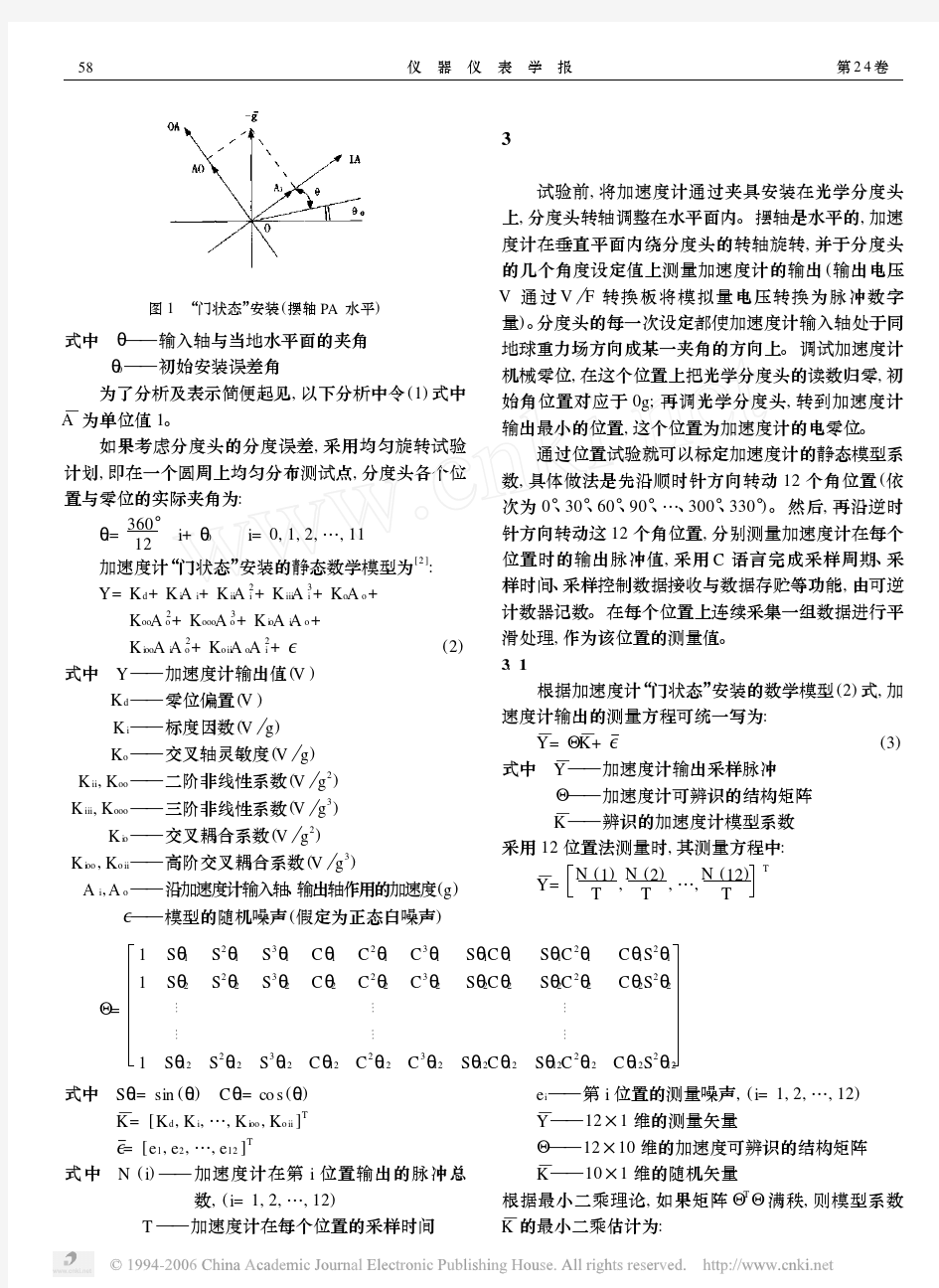
第四章 等效电路模型参数在线辨识 通过第三章函数拟合的方法可以确定钒电池等效电路模型中的参数,但是在实际运行过程中模型参数随着工作环境温度、充放电循环次数、SOC 等因素发生变化,根据离线试验数据计算得到的参数值估算电池SOC 可能会造成较大的估计误差。因此,在实际运行时,应对钒电池等效电路模型参数进行在线辨识,做出实时修正,提高基于模型估算SOC 的精度。 4.1 基于遗忘因子的最小二乘算法 参数辨识是根据被测系统的输入输出来,通过一定的算法,获得让模型输出值尽量接近系统实际输出值的模型参数估计值。根据能否实时辨识系统的模型参数,可以将常用的参数辨识方法分为离线和在线两类,离线辨识只能在数据采集完成后进行,不能对系统模型实时地在线调整参数,对于具有非线性特性的电池系统往往不能得到满意的辨识结果;在线辨识方法一般能够根据实时采集到的数据对系统模型进行辨识,在线调整系统模型参数。常用的辨识方法有最小二乘法、极大似然估计法和Kalman 滤波法等。因最小二乘法原理简明、收敛较快、容易理解和掌握、方便编程实现等特点,在进行电池模型参数辨识时采用了效果较好的含遗忘因子的递推最小二乘法。 4.1.1 批处理最小二乘法简介 假设被辨识的系统模型: 12121212()()()1n n n n b z b z b z y z G z u z a z a z a z ------+++==++++L L (4-1) 其相应的差分方程为: 1 1 ()()()n n i i i i y k a y k i b u k i ===--+-∑∑(4-2) 若考虑被辨识系统或观测信息中含有噪声,则被辨识模型式(4-2)可改写为: 1 1 ()()()()n n i i i i z k a y k i b u k i v k ===--+-+∑∑(4-3) 式中, ()z k 为系统输出量的第k 次观测值;()y k 为系统输出量的第k 次真值,()y k i -为系统输出量的第k i -次真值;()u k 为系统的第k 个输入值,()u k i -为 系统的第k i -个输入值;()v k 为均值为0的随机噪声。
分类号: 密级:毕业论文(设计) 题目:重力加速度多种测量方法的讨论系别: 专业年级: 姓名: 学号: 指导教师: 2015年06月03日
原创性声明 本人郑重声明:本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。毕业论文中凡引用他人已经发表或未发表的成果、数据、观点等,均已明确注明出处。除文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的科研成果。对本文的研究成果做出重要贡献的个人和集体,均已在文中以明确方式标明。 本声明的法律责任由本人承担。 论文作者签名:日期:
关于毕业论文使用授权的声明 本人在指导老师指导下所完成的论文及相关的资料(包括图纸、试验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属吕梁学院。本人完全了解吕梁学院有关保存、使用毕业论文的规定,同意学校保存或向国家有关部门或机构送交论文的纸质版和电子版,允许论文被查阅和借阅;本人授权吕梁学院可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存和汇编本毕业论文。如果发表相关成果,一定征得指导教师同意,且第一署名单位为吕梁学院。本人离校后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为吕梁学院。 论文作者签名:日期: 指导老师签名:日期:
摘要 物理学的产生和发展都离不开实验,而对于一个相同的物理量来说,可以有不同的测量方法和测量途径。本论文主要是研究用弹簧测力计和天平组合测量法、水滴法、单摆法、打点计时器法来测量重力加速度。并分别从以下几个方面来对这四种实验进行讨论:实验原理理解的难易程度、操作过程的繁易程度、是否适合自身条件、是否适合测量当地的重力加速度、每个实验所产生误差的原因。通过对前边四种实验的理解,结合自己的实验条件,设计出了一个用小球和细管的组合来测量重力加速度的方法。并多次做了这个实验,并把实验的结果与前边四种实验方法进行比较,比较了这几种方法的优点缺点以及测量的精确度。最后对这几种测量方法进行分析归纳,总结出这几种实验方法的利与弊,找出了一种既方便又能精确测量当地重力加速度的方法。 关键词:重力加速度;实验;测量方法
大学物理重力加速度的测定实验报告范 文 一、实验任务 精确测定银川地区的重力加速度 二、实验要求 测量结果的相对不确定度不超过5% 三、物理模型的建立及比较 初步确定有以下六种模型方案: 方法一、用打点计时器测量 所用仪器为:打点计时器、直尺、带钱夹的铁架台、纸带、夹子、重物、学生电源等. 利用自由落体原理使重物做自由落体运动.选择理想纸带,找出起始点0,数出时间为t的p点,用米尺测出op的距离为h,其中t=0.02秒×两点间隔数.由公式h=gt2/2得g=2h/t2,将所测代入即可求得g. 方法二、用滴水法测重力加速度 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n 取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法三、取半径为r的玻璃杯,内装适当的液体,固定在旋转台上.旋转台绕其对称轴以角速度ω匀速旋转,这时液体相对于玻璃
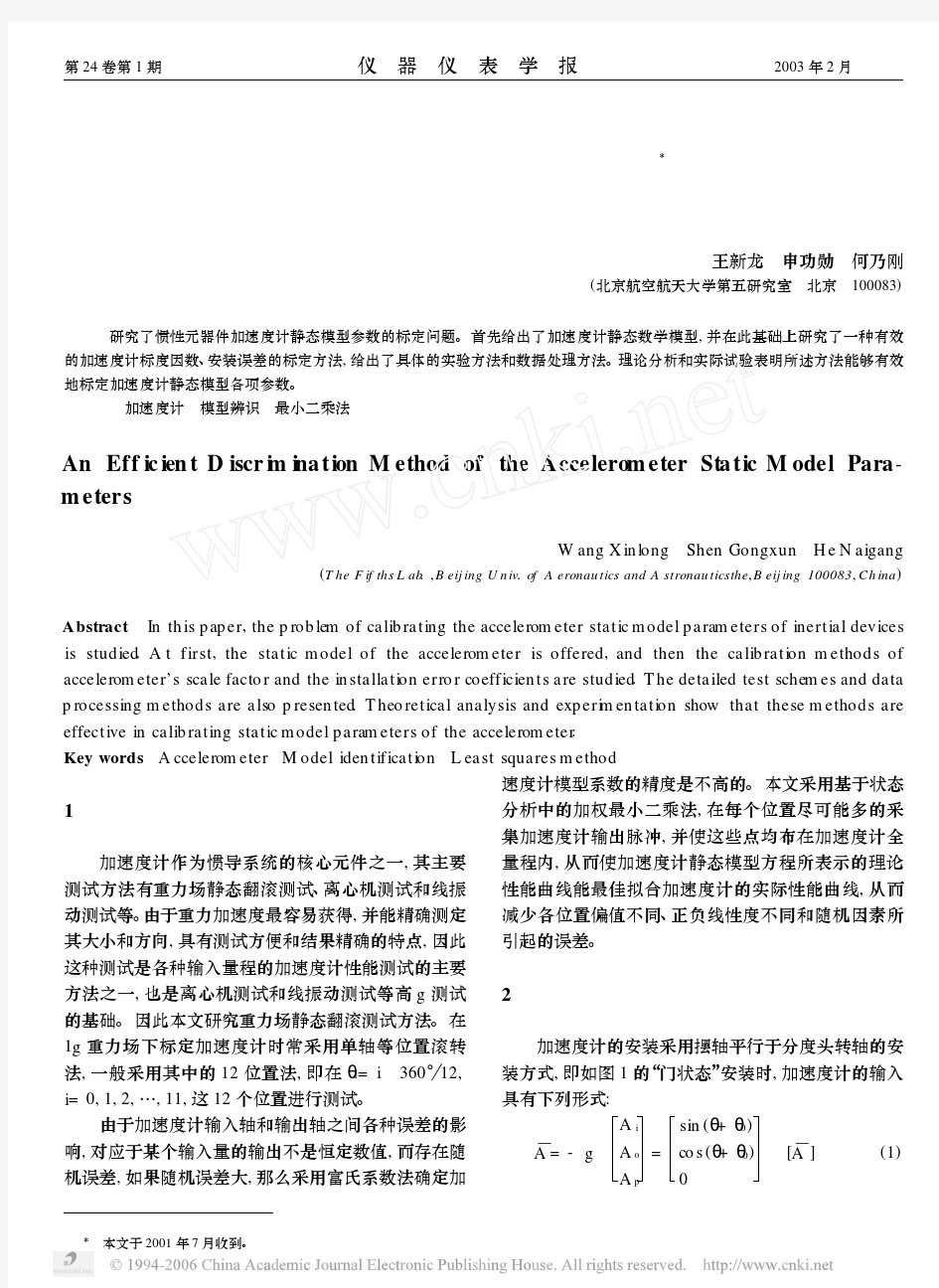
杯的形状为旋转抛物面 重力加速度的计算公式推导如下: 取液面上任一液元a,它距转轴为x,质量为m,受重力mg、弹力n.由动力学知: ncosα-mg=0 (1) nsinα=mω2x (2) 两式相比得tgα=ω2x/g,又tgα=dy/dx,∴dy=ω2xdx/g, ∴y/x=ω2x/2g. ∴ g=ω2x2/2y. .将某点对于对称轴和垂直于对称轴最低点的直角坐标系的坐标x、y测出,将转台转速ω代入即可求得g. 方法四、光电控制计时法 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n 取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法五、用圆锥摆测量 所用仪器为:米尺、秒表、单摆. 使单摆的摆锤在水平面内作匀速圆周运动,用直尺测量出h(见图1),用秒表测出摆锥n转所用的时间t,则摆锥角速度ω=2πn/t 摆锥作匀速圆周运动的向心力f=mgtgθ,而tgθ=r/h所以mgtgθ=mω2r由以上几式得: g=4π2n2h/t2. 将所测的n、t、h代入即可求得g值.
压 电 式 加 速 度 测 试 系 统 姓名:张书峰 学号:201003140125 学院:机电学院 班级:机自101 指导教师:王玮
一设计概论 压电传感器是一种可逆性传感器,既可以将机械能转换为电能,又可以将机械能转换为电能。它是利用某些物质(如石英、钛酸钡或压电陶瓷、高分子材料等)的压电效应来工作的。在外力作用下,在电介质表面产生电荷,从而实现非电量测量的目的。因此是一种典型的自发电式传感器。压电传感器是力敏感元件,它可以测量最终能变换为力的那些非电物理量,例如,动态力、动态压力、振动加速度等 现有测试系统的各个组成部分常常以信息流的过程来划分。一般可以分为:信息的获得,信息的转换,信息的显示、信息的处理。作为一个完整的非电量电测系统,也包括了信息的获得、转换、显示和处理等几个部分。因为它首先要获得被测量的信息,把它变换成电量,然后通过信息的转换,把获得的信息变换、放大,再用指示仪或记录仪将信息显示出来,有的还需要把信息加以处理。因此非电量电测系统,具体来说,一般包括传感器(信息的获得)、测量电路(信息的转换)、放大器、指示器、记录仪(信息的显示)等几部分有时还有数据处理仪器(信息的处理)。它们间的 关系可 用右框 图来表 示。 其中传感器是一个把被测的非电物理变换成电量的装置,因此是一种获得信息的手段,它在非电量电测系统中占有重要的位 置。它获得信息 的正确与否,直 接影响到整个 测量系统的测 量效果。测量电 路的作用是把 传感器的输出
变量变成易于处理的电压或电流信号,使信号能在指示仪上显示或在记录仪中记录。测量电路的种类由传感器的类型而定。压电加速度传感器常用的测量电路是电荷放大器。常用的压电加速度传感器的动态测量系统如图1.2 二整体设计方案 1、测量的示意图 2、设计的原理 压电式加速度传感器属于惯性式传感器,工作原理是以某些物质的压电效应为基础,在加速度计受振时,加在压电元件上的力也随之变化。当被测振动频率远低于加速度计的固有频率时,则力的变化与被测加速度成正比,可以把被测的非电物理量加速度转化为电量。由于压电式传感器的输出电信号是微弱的电荷,而且传感器本身有很大内阻,故输出能量甚微,这给后接电路带来一定困难。为此,通常器信号选用电荷放大器作为电信号的测量电路。 3、方框图
浅析电力系统模型参数辨识 (贵哥提供) 一、现状分析 随着我国电力事业的迅猛发展, 超高压输电线路和大容量机组的相继投入, 对电力系统稳定计算、以及其安全性、经济性和电能质量提出了更高的要求。现代控制理论、计算机技术、现代应用数学等新理论、新方法在电力系统的应用,正在促使电力工业这一传统产业迅速走向高科技化。 我国大区域电网的互联使网络结构更复杂,对电力系统安全稳定分析提出了更高的要求,在线、实时、精确的辨识电力系统模型参数变得更加紧迫。由于电力系统模型的基础性、重要性,国外早在上世纪三十年代就开始了这方面的分析研究,[1,2]国内外的电力工作者在模型参数辨识方面做了大量的研究工作。[3]随后IEEE相继公布了有关四大参数的数学模型。1990年全国电网会议上的调查确定了模型参数的地位,促进了模型参数辨识的进一步发展,并提出了研究发电机、励磁、调速系统、负荷等元件的动态特性和理论模型,以及元件在极端运行环境下的动态特性和参数辨识的要求。但传统的测量手段,限制了在线实时辨识方法的实现。 同步相量测量技术的出现和WAMS系统的研究与应用,使实现在线实时的电力系统模型参数辨识成为可能。同步相量是以标准时间信号GPS作为同步的基准,通过对采样数据计算而得的相量。相量测量装置是进行同步相量测量和输出以及动态记录的装置。PMU的核心特征包括基于标准时钟信号的同步相量测量、失去标准时钟信号的授时能力、PMU与主站之间能够实时通信并遵循有关通信协议。 自1988年Virginia Tech研制出首个PMU装置以来,[4]PMU技术取得了长足发展,并在国内外得到了广泛应用。截至2006年底,在我国范围内,已有300多台P MU装置投入运行,并且可预计,在不久的将来PMU装置会遍布电力系统的各个主要电厂和变电站。这为基于PMU的各种应用提供了良好的条件。 二、系统辨识的概念 系统模型是实际系统本质的简化描述。[5]模型可分为物理模型和数学模型两大类。物理模型是根据相似原理构成的一种物理模拟,通过模型试验来研究系统的
加速度传感器选型 压电加速度传感器因其频响宽、动态范围大、可靠性高、使用方便,受到广泛应用。在一般通用振动测量时,用户主要关心的技术指标为:灵敏度、频率范围,内部结构、内置电路型与纯压电型的区别,现场环境与后续仪器配置等。 一、灵敏度的选择 制造商在产品介绍或说明书中一般都给出传感器的灵敏度和参考量程范围,目的是让用户在选择不同灵敏度的加速度传感器时能方便地选出合适的产品,最小加速度测量值也称最小分辨率,考虑到后级放大电路噪声问题,应尽量远离最小可用值,以确保最佳信噪比。最大测量极限要考虑加速度传感器自身的非线性影响和后续仪器的最大输出电压。 估算方法:最大被测加速度×传感器电荷(电压)灵敏度,其数值是否超过配套仪器的最大输入电荷(电压)值。建议如已知被测加速度范围可在传感器指标中的“参考量程范围”中选择(兼顾频响、重量),同时,在频响、质量允许的情况下,尽量选择高灵敏度的传感器,以提高后续仪器输入信号,提高信噪比。在兼顾频响、质量的同时,可参照以下范围选择传感器灵敏度:以电荷输出型压电加速度传感器为例: 1、土木工程和超大型机械结构的振动在0.1g-10g (1g=9.81m/s2)左右,可选电荷灵敏度在300pC/ms-2~ 30pC/ms-2的压电加速度传感器,属于电荷输出型压电加速度传感器 2、特殊的土木结构(如桩基)和机械设备的振动在100ms-2~1000ms-2,可选择20pC/ms-2~2pC/ms-2的加速度传感器。 3、冲击,碰撞测量量程一般10000ms-2~1000000ms-2,可选则传感器灵敏度是0.2pC/ms-2~ 0.002pC/ms-2的加速度传感器。 二、频率选择 制造商给出的加速度传感器的频响曲线是用螺钉刚性连接安装的。 一般将曲线分成二段:谐振频率和使用频率。使用频率是按灵敏度偏差给出的,有±10%、±5%、±3dB。谐振频率一般是避开不用的,但也有特例,如轴承故障检测。选择加速度传感器的频率范围应高于被测试件的振动频率。有倍频分析要求的加速度传感器频率响应应更高。土木工程一般是低频振动,加速度传感器频率响应范围可选择0.2Hz~1kHz,机械设备一般是中频段,可根据设备转速、设备刚度等因素综合估算振动频率,选择0.5Hz~ 5kHz 的加速度传感器。如发电机转速在3000rms 时,除以60s 此时它的主频率为50Hz。碰撞、冲击测量高频居多。 加速度传感器的安装方式不同也会改变使用频响(对振动值影响不大)。 安装面要平整、光洁,安装选择应根据方便、安全的原则。我们给出同一只AD500S 加速度传感器不同安装方式的使用频率:螺钉刚性连接(±10%误差)10kHz;环氧胶或“502”粘接安装6kHz;磁力吸座安装 2kHz;双面胶安装1kHz。由此可见,安装方式的不同对测试频率的响应影响很大,应注意选择。加速度传感器的质量、灵敏度与使用频率成反比,灵敏度高,质量大,使用频率低,这也是选择的技巧。 三、内部结构 内部结构是指敏感材料晶体片感受振动的方式及安装形式。有压缩和剪切两大类,常见的有中心压缩、平面剪切、三角剪切、环型剪切。 中心压缩型频响高于剪切型,剪切型对环境适应性好于中心压缩型。如配用积分型电荷放大器测量速度、位移时,最好选用剪切型产品,这样所获得的信号波动小,稳定性好。 四、内置电路 内置的概念是将放大电路置于加速度传感器内,成为具有电压输出功能的传感元件。它可分双电源(四线)和单电源(二线、带偏置,又称ICP) 两种,下面所指内装电路专指ICP
中国石油大学(华东)现代远程教育 实验报告 课程名称:大学物理() 实验名 称: 速度、加速度的测定和牛顿运动定律的验证 实验形式:在线模拟+现场实践 提交形式:提交书面实验报告 学生姓学号: 年级专业层次:高起专 学习中心:________ 提交时间:2016 年6 月15 日
、实验目的 1.了解气垫导轨的构造和性能,熟悉气垫导轨的调节和使用方法。 2?了解光电计时系统的基本工作原理,学会用光电计时系统测量短暂时间的方法。 3.掌握在气垫导轨上测定速度、加速度的原理和方法。 4?从实验上验证F=ma的关系式,加深对牛顿第二定律的理解。 5?掌握验证物理规律的基本实验方法。 二、实验原理 1速度的测量 一个作直线运动的物体,如果在t~t+ △时间内通过的位移为\x x~x+ Ax ,则该物体在 1F =—— At时间内的平均速度为亠,△越小,平均速度就越接近于t时刻的实际速度。当 A t T 时,平均速度的极限值就是t时刻(或x位置)的瞬时速度 ir = lim ------------------——— (1) 实际测量中,计时装置不可能记下 A t T0勺时间来,因而直接用式(1)测量某点的速 度就难以实现。但在一定误差范围内,只要取很小的位移Ax测量对应时间间隔At就可 以用平均速度订近似代替t时刻到达x点的瞬时速度r。本实验中取Ax为定值(约10mm ), 用光电计时系统测出通过Ax所需的极短时间A,较好地解决了瞬时速度的测量问题。 2.加速度的测量 在气垫导轨上相距一定距离S的两个位置处各放置一个光电门,分别测出滑块经过这两 个位置时的速度v1和v2。对于匀加速直线运动问题,通过加速度、速度、位移及运动时间之间的关系,就可以实现加速度a的测量。 (1)由■- "-+■-测量加速度 在气垫导轨上滑块运动经过相隔一定距离的两个光电门时的速度分别为v1和v2,经过 两个光电门之间的时间为t21,则加速度a为 (2) (2)根据式(2)即可计算出滑块的加速度。 (3)由厂测量加速度 设v1和v2为滑块经过两个光电门的速度,S是两个光电门之间距离,则加速度a为 根据式(3)也可以计算出作匀加速直线运动滑块的加速度。
重力加速度测量的十种方法 方法一、用弹簧秤和已知质量的钩码测量 将已知质量为m的钩码挂在弹簧秤下,平衡后,读数为G.利用公式 G=mg得g=G/m. 方法二、用滴水法测重力加速度 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法三、用单摆测量(见高中物理学生实验) 方法四、用圆锥摆测量.所用仪器为:米尺、秒表、单摆. 使单摆的摆锤在水平面内作匀速圆周运动,用直尺测量出h(见图1),用秒表测出摆球n转所用的时间t,则摆球角速度ω=2πn/t 摆球作匀速圆周运动的向心力F=mgtgθ,而tgθ=r/h所以mgtgθ=mω2r由以上几式得:
g=4π2n2h/t2. 将所测的n、t、h代入即可求得g值. 方法五、用斜槽测量,所用仪器为:斜槽、米尺、秒表、小钢球. 按图2所示装置好仪器,使小钢球从距斜槽底H处滚下,钢球从水平槽底末端以速度v作平抛运动,落在水平槽末端距其垂足为H′的水平地面上,垂足与落地点的水平距离为S,用秒表测出经H′所用的时间t,用米尺测出S,则钢球作平抛运动的初速度v=S/t.不考虑摩擦,则小球在斜槽上运动时,由机械能守恒定律得:mgH=mv2/2.所以g=v2/2H=S2/2Ht2,将所测代入即可求得g值. 方法六、用打点计时器测量.所用仪器为:打点计时器、直尺、带钱夹的铁架台、纸带、夹子、重物、学生电源等. 将仪器按图3装置好,使重锤作自由落体运动.选择理想纸带,找出起始点0,数出时间为t的P点,用米尺测出OP的距离为h,其中t=0.02 秒×两点间隔数.由公式h=gt2/2得g=2h/t2,将所测代入即可求得g.
重力加速度的测量及应用 重力加速度g值的准确测定对于计量学、精密物理计量、地球物理学、地震预报、重力探矿和空间科学等都具有重要意义。 测量: 最早测定重力加速度的是伽利略。约在1590年,他利用倾角为θ的斜面将g的测定改为测定微小加速度a=gsinθ,。1784年,G?阿特武德将质量同为M的重物用绳连接后,挂在光滑的轻质滑轮上,再在另一个重物上附加一重量小得多的重物m,使其产生一微小加速度a =mg/(2M+m),测得a后,即可算出g。 1888年,法国军事测绘局使用新的方法进行了g值的计量.它的原理简述为:若一个物体如单摆那样以相同的周期绕两个中心摆动,则两个中心之间的距离等于与上述周期相同的单摆的长度。当时的计量结果为:g=9.80991m/s2。 1906年,德国的库能和福脱万勒用相同的方法在波茨坦作了g值的计量,作为国际重力网的参考点,即称为“波茨坦重力系统”的起点,其结果为g(波茨坦)=9.81274m/s2。 根据波茨坦得到的g值可以通过相对重力仪来求得其他地点与它的差值,从而得出地球上各地的g值,这样建立起来的一系列g值就称为波茨坦重力系统。国际计量局在1968年10月的会议上推荐,自1969年1月1日起,g(波茨坦)减小到9.81260m/s2。根据上述修正了的波茨坦系统,在地球上的一级点位置的g值的不确定度可小于5×10-7。 应用: 地球对表面物体具有吸引力,重力加速度是度量地球重力大小的物理量。按照万有引力定律,地球各处的重力加速度应该相等。但是由于地球的自转和地球形状的不规则,造成各处的重力加速度有所差异,与海拔高度、纬度以及地壳成分、地幔深度密切相关。 重力预震:地球物理学研究中要求观测重力长期的细微的变化,即所谓g的长度;这种变化可能是由于地壳运动,地球的内部结构和形状的演变,太阳系中动力常数的长度以及引力常数G的变化等等。观测这些变化要求g值的计量不确定度达10-8至10-9量级。观测g值的变化可能对预报地震有密切的关系.据有关方面报道,七级地震相对应的g值变化约为0.1×10-5m/s2。目前,许多国家都在探索用g值的变化作临震预报。 重力探矿:利用地下岩石和矿体密度的不同而引起地面重力加速度的相应的变化。故根据在地面上或海上测定g的变化,就可以间接地了解地下密度与周围岩石不同的地质构造、矿体和岩体埋藏情况,圈定它们的位置。所用的仪器是重力仪和扭秤(目前已为高精度重力仪所代替)。
重力加速度的测定 一,实验目的 1,学习秒表、米尺的正确使用 2,理解单摆法和落球法测量重力加速度的原理。 3,研究单摆振动的周期与摆长、摆角的关系。 4,学习系统误差的修正及在实验中减小不确定度的方法。 二,实验器材 单摆装置,停表(精度为0.01s),钢卷尺(精度为1mm),游标卡尺(精度为0.02mm) 三,实验原理 单摆是由一根不能伸长的轻质细线和悬在此线下端体积很小的重球所构成。在摆长远大于球的直径,摆球质量远大于线的质量的条件下,将悬挂的小球自平衡位置拉至一边(很小距离,摆角小于5°),然后释放,摆球即在平衡位置左右作周期性的往返摆动,如图2-1所示。 f =F sinθf θ T=F cosθ F= mg L 单摆原理图
摆球所受的力f 是重力和绳子张力的合力,f 指向平衡位置。当摆角很小时(θ<5°),圆弧可近似地看成直线,f 也可近似地看作沿着这一直线。设摆长为L ,小球位移为x ,质量为m ,则 L x = θsin f=θsin F =-L x mg - =-m L g x 由f=ma ,可知a=- L g x 式中负号表示f 与位移x 方向相反。 单摆在摆角很小时的运动,可近似为简谐振动,比较谐振动公式:a = m f =-ω2 x 可得ω=l g ,即02 22=+x dt x d ω,解得)cos(0?ω+=t A x ,0A 为振幅,?为初相。 应有[])2cos())((cos )cos(000?πω?ω?ω++=++=+=t A T t A t A x 于是得单摆运动周期为:T =ωπ 2=2πg L 即 T 2=g 2 4πL 或 g=4π22 T L 又由于细线不是完全没有质量,他在外力作用下也不可能完成伸长,所以,单摆的重力加速度公式修正为 22 21 4T d L g +=π 四,实验步骤 1,数据采集 (1)测量摆长L 用米尺测量摆球支点和摆球顶点或最低点的间距l ,用游标卡尺测量小球的直径d,则摆长 d l L 2 1+= (2)测量摆动周期 用手把摆球拉至偏离平衡位置约? 5放开,让其在一个铅直面内自由摆动,当小球通过平衡位置的瞬间,开始计时,连续默数100次全振动时间为t ,再除以100,得到周期T 。 (3)将所测数据列于下表中,并计算出摆长、周期及重力加速度。
基于最小二乘模型的Bayes 参数辨识方法 王晓侃1,冯冬青2 1 郑州大学电气工程学院,郑州(450001) 2 郑州大学信息控制研究所,郑州(450001) E-mail :wxkbbg@https://www.doczj.com/doc/193325545.html, 摘 要:从辨识定义出发,首先介绍了Bayes 基本原理及其两种常用的方法,接着重点介绍了基于最小二乘模型的Bayes 参数辨识,最后以实例用MATLAB 进行仿真,得出理想的辨识结果。 关键词:辨识定义;Bayes 基本原理;Bayes 参数辨识 中国图书分类号:TP273+.1 文献标识码:A 0 概述 系统辨识是建模的一种方法。不同的学科领域,对应着不同的数学模型,从某种意义上讲,不同学科的发展过程就是建立它的数学模型的过程。建立数学模型有两种方法:即解析法和系统辨识。L. A. Zadehll 于1962年曾对”辨识”给出定义[1]:系统辨识是在对输入和输出观测的基础上,在指定的一类系统中,确定一个与被识别的系统等价的系统。一般系统输出y(n)通常用系统过去输出y(n-m)和现在输入u(n)及过去输入u(n-m)的函数描述 y(n)=f(y(n-1),y(n-2),...,y(n-m y ), u(n),u(n-1),... ,u(n-m u ))=f(x(n),n) x(n)=[y(n-1),y(n-2),...y(n-m y ), u(n),u(n-1),...,u(n-m u )]’ 这里f(,)为未知函数关系,一般情况为泛函数,可以是线性函数或非线性函数,分别对应于线性或非线性系统,通常这个函数未知,但是局部输入输出数据可以测出,系统辨识的任务就是根据这部分信息寻找确定函数或确定系统来逼近这个未知函数。但实际上我们不可能找到一个与实际系统完全等价的模型。从实用的角度来看,系统辨识就是从一组模型中选择一个模型,按照某种准则,使之能最好地拟合由系统的输入输出观测数据体现出的实际系统的动态或静态特性。接下来本文就以最小二乘法为基础的Bayes 辨识方法为例进行分析介绍并加以仿真[4]。 1 Bayes 基本原理 Bayes 辨识方法的基本思想是把所要估计的参数看做随机变量,然后设法通过观测与该参数有关联的其他变量,以此来推断这个参数。 设μ是描述某一动态系统的模型,θ是模型μ的参数,它会反映在该动态系统的输入输出观测值中。如果系统的输出变量z(k)在参数θ及其历史纪录(1) k D ?条件下的概率密度函 数是已知的,记作p(z(k)|θ,(1) k D ?),其中(1) k D ?表示(k-1)时刻以前的输入输出数据集 合,那么根据Bayes 的观点参数θ的估计问题可以看成是把参数θ当作具有某种先验概率密 度p (θ,(1) k D ?)的随机变量,如果输入u(k)是确定的变量,则利用Bayes 公式,把参数θ 的后验概率密度函数表示成[2] p (θ,k D )= p (θ|z (k ),u(k ), (1) k D ?)=p (θ|z (k ),(1) k D ?) = (k-1) (k-1) p(z(k)/,D )p(/D ) (k-1)(k-1)p(z(k)/,D )p(/D )d θθθθθ∞∫?∞ (1) 在式(1)中,参数θ的先验概率密度函数p(θ|(1) k D ?)及数据的条件概率密度函数p(z(k)|θ,
转速测量方法与转速仪表 转速测量在国民经济的各个领域,都是必不可少的。本文就转速测量方法以及实施检测的仪表,做一简单的阐述。希望给工作中需要转速测量仪表,和在转速测量或相关领域进行研究开发的人员提供一些参考意见。 关键词:速度线速度角速度转速误差和精度采样时 间虚拟仪表 主题:考察转速测量方法演变,从演变的轨迹对转速测量有一个比较全面 的了解,着重介绍智能转速表的检测方法和实施检测的仪表。 内容提要: ?转速检测仪表的分类 ?电子式转速表 ?转速测量的方法 ?结束语 ?附录 一、转速检测仪表的分类: 1.离心式转速表,利用离心力与拉力的平衡来指示转速。离心式 转速表是最传统的转速测量工具,是利用离心力原理的机械式转速表;测量精度一般在1~2级,一般就地安装。一只优良的离心式转速表不但有准确直观的特点,还具备可靠耐用的优点。但是结构比较复杂。
2.磁性转速表,利用旋转磁场,在金属罩帽上产生旋转力,利用旋 转力与游丝力的平衡来指示转速。磁性转速表,是成功利用磁力的一个典范,是利用磁力原理的机械式转速表;一般就地安装,用软轴可以短距离异地安装。磁性转速表,因结构较简单,目前较普遍用于摩托车和汽车 以及其它机械设备。异地安装时软轴易损坏。 3.电动式转速表,由小型交流发电机、电缆、电动机和磁性表头组 成。小型交流发电机产生交流电,交流电通过电缆输送,驱动小型交流电动机,小型交流电动机的转速与被测轴的转速一致。磁性转速表头与小型交流电动机同轴连接在一起,磁性表头指示的转速自然就是被测轴的转速;电动式转速表,异地安装非常方便,抗振性能好,广泛运用于柴油机 和船舶设备。 4.磁电式转速表,磁电传感器加电流表,异地安装非常方便。 5.闪光式转速表,利用视觉暂留的原理。闪光式转速表,除了检测 转速(往复速度)外,还可以观测循环往复运动物体的静像,对了解机械 设备的工作状态,是一必不可少的观测工具。 6.电子式转速表,电子技术的不断进步,使这一类转速表有了突飞 猛进的发展。 上述6种转速表,具有各自独特的结构和原理,既代表着不同时期的技术发展水平,也体现人类认识自然的阶段性发展过程。时代在不断前进,有些东西将会成为历史;但我们留心回顾一下,不禁要惊叹前贤的匠心! 1.离心式转速表,是机械力学的成果;
ISSN 1000-0054CN 11-2223/N 清华大学学报(自然科学版)J T singh ua Un iv (Sci &Tech ),1999年第39卷第3期 1999,V o l.39,N o.311/34 37~40 负荷建模和参数辨识的遗传进化算法* 朱守真, 沈善德, 郑宇辉, 李 力, 艾 芊, 曲祖义 清华大学电机工程与应用电子技术系,北京100084; 东北电力集团公司,沈阳110006 收稿日期:1998-06-23 第一作者:女,1950年生,副教授 *基金项目:国家攀登计划B(85-35) 文 摘 提出了一种用于电力系统负荷建模和参数辨识的遗传进化算法,该方法与传统的最小二乘法相比具有全局搜索优化特点,适用于非线性、不连续或微分不连续的各种负荷模型。该方法已成功用于工业负荷实测数据辨识及动态和静态负荷建模。在静态负荷建模上,辨识结果略优于传统的最小二乘法,且通用性更好,只需做极小的修改就可以用于各种形式的静态负荷模型。在动态负荷建模上算法不仅给出了更优秀的结果,而且表现出很好的稳健性。结果表明此方法在负荷建模中的优势。 关键词 遗传进化算法;负荷建模;参数辨识分类号 T M 761 电力负荷模型是电力系统分析、规划、运行和计算的基础,尤其在计算中对电力系统动态行为的模拟结果影响很大。不同的计算需要采用不同的负荷模型,常规采用以不同比例的恒定阻抗、恒定电流、恒定功率或考虑不同动静比例负荷模型的方式使计算结果相差很大,甚至会导致完全错误的结论[1,2]。研究表明建立符合实际的负荷模型是十分必要的。负荷特性具有时变、非线形、不确定等多种特点,且实际负荷的用电设备构成差别很大,尤其是当电压或电流变化时,负荷产生突变,这也增加了建模的难度和复杂性。参数辨识是负荷建模的核心,目前常用的有最小二乘法、辅助变量法、分段线性多项式等方法,其中传统的方法不能有效地克服负荷建模中的非线性和不连续性等问题,会产生多值性等误差。近年来ANN 方法在建模方面已取得成功,但该方法更侧重于模拟模型的动态过程,且形成的结果是非参数模型。 遗传进化算法是模拟自然界进化中优胜劣汰的 优化过程,原则上能以较大的概率找到全局的最优解,具有并行、通用、鲁棒性强,全局收敛性好等优 点。研究人员已在发电规划[3],发电调度[4],无功优化[5]中用算例证明了EP 方法比传统的梯度寻优技术更优越。 本文采用遗传进化算法对静态、动态负荷进行了实测建模。 1 电力负荷的数学模型 本文主要描述以负荷特性来分类的静态和动态模型的建模方法。1.1 静态负荷模型 静态负荷模型表示某一时刻负荷所吸收的有功功率和无功功率与同一时刻负荷母线电压和频率之间的函数关系。静态负荷模型一般以幂函数和多项式模型表示。 本文以幂函数模型为例进行计算,幂函数表示的静态负荷特性如下: P =P 0U a 1f a 2, Q =Q 0 U b 1 f b 2 . (1) 定义误差函数 E w = N i =1 [W m (i )-W c (i )] 2 N (2)式中:N 为测量点数,W m (i )分别表示第i 次有功或无功功率测量值,W c (i )表示利用第i 次采样U i ,f i 的值由式(1)得到的有功或无功计算值,X p 、X q 是待辨识参数的向量: X p =[P 0,a 1,a 2], X q =[Q 0,b 1,b 2]. (3) 辨识问题表述为极小值寻优问题,即搜索一组参数使误差E w 达到最小值。1.2 动态负荷的模型 动态负荷模型表示某一时刻负荷所吸收的有功
用三种方法测量重力加速度 朱津纬1 (1.复旦大学物理学系,上海市200433) 摘要:本实验通过手机phyphox软件,用三种方法测量了重力加速度。分别将落币法、复摆法和弹簧法所得的重力加速度结果与实际值比较,误差不超过4%。 1 引言 随着科技的发展,如今智能手机功能越来越丰富。许多应用软件全面地利用手机中传感器,可以用来实施物理实验[1,2]。其中,“phyphox”是集合了很多实验项目的应用软件。本实验将利用它来测量重力加速度。 重力加速度可通过多种方法进行测得。如单摆法[3],多管落球法[4],和利用自由落体的方法[5]等。在本实验中,重力加速度利用落币法、复摆法和弹簧法三种方法被测量,并与标准值比较。 2 实验原理 首先,分别介绍三种方法的理论原理。 2.1 落币法 该实验将利用“phyphox”中的“声控秒表”项目,测量硬币从不同高度?自由落体所 需的时间t。通过对t?√?数据线性拟合,得到重力加速度g=2 斜率2 。 如图1所示,硬币自由落体下落的高度为?。用水笔敲击直尺发出敲击声,设该时刻为t0。经过微小时间差Δt(与高度无关,假设为常量),硬币开始下落,设该时刻为t1。一段时间后,硬币落到地上,并发出与地面的碰撞声,设该时刻为t2。“声控秒表”测量了两次声响的时间差t=t2?t0。 由自由落体公式可知 ?=1 2g(t2?t1)2=1 2 g(t?Δt)2,(2.1) 即 t=√2 g √?+Δt。(2.2) 因此t?√?呈线性关系,斜率为√2 g 。 2.2 复摆法 图1 落币法实验示意图
该实验将利用“phyphox ”中的“单摆”项目,测量不同摆长L 复摆的摆动周期T 。通过 对T 2? L 2+bL+ b 23 (L+b 2) 数据线性拟合,得到重力加速度g = 4π 2 斜率 。 如图2所示,长度为L 的细线与宽度为b 的手机组成复摆,以杆子为轴前后摆动。设复摆的转动惯量为I ,手机(过中心水平轴)的转动惯量为I c = mb 212 。则由平行轴定理得 I =I c +m(L +b 2)2。 (2.3) 由复摆摆动周期公式得 T =2π√ I mg(L+b 2 ) =2π√ L 2+bL+ b 23 g(L+b 2 ) 。 (2.4) 因此T 2? L 2+bL+ b 23 (L+b 2) 呈线性关系,斜率为4π2g 。 2.3 弹簧法 该实验将利用“phyphox ”中的“弹簧”项目,测量悬挂不同质量重物弹簧的(平衡时的)下端位置x 和振动周期T 。通过对x ?T 2数据线性拟合,得到重力加速度g =斜率。之后,将考虑空气阻力,得到修正结果。 如图3所示,弹簧悬挂重物。设弹簧不悬挂重物时的平衡位置为x 0(是常量)、弹簧的弹性系数为k 、塑料袋重物的总质量为m 。 由受力平衡,得 mg =k (x ?x 0)。 (2.5) 再由弹簧的周期公式 T =2π√m k , (2.6) 消去m ,得 x =g (T 2π)2+x 0。 (2.7) 图3 弹簧法实验示意图 图2 复摆法实验示意图
上海交通大学 硕士学位论文 Bouc-Wen滞回模型的参数辨识及其在电梯振动建模中的应用 姓名:周传勇 申请学位级别:硕士 专业:机械设计及理论 指导教师:李鸿光 20080201
Bouc-Wen滞回模型的参数辨识 及其在电梯振动建模中的应用 摘 要 电梯导靴是连接轿箱系统与导轨的装置,它能起到导向和隔振减振的作用。同时,在电梯的运行过程中它又将导轨由于制造或安装所造成的表面不平顺度传递给轿箱系统,从而引起轿箱系统的水平振动。国内外学者在电梯水平振动的建模和分析中,往往把导靴视为线性弹簧-阻尼元件来建模而忽略了非线性因素。事实上导靴与导轨之间存在非线性的迟滞摩擦力,本文通过实验的方法,采用Bouc-Wen 滞回模型来建立导靴-导轨非线性摩擦力模型。 Bouc-Wen滞回模型因其微分形式的非线性表达式而使得其参数辨识存在较大的困难,本文利用模型中部分参数的不敏感性,通过数学变换将非线性参数辨识问题转化为线性参数辨识问题,从而使得问题大大简化,参数辨识的效果也能满足要求。 基于以上导靴-导轨间摩擦力模型,本文进而建立了轿箱-导轨耦合水平振动动力学模型,该模型将轿箱系统等效为2自由度的平面运动刚体,将导靴等效为质量-弹簧-阻尼单元,同时考虑了导靴-导轨间的非线性摩擦力,以及导靴靴衬与导轨间接触的不连续性等。 在建立了轿箱-导轨耦合水平振动动力学模型后,利用Matlab/Simulink,建立了相应的仿真模型,开展了几种典型导轨不
平顺度激励(弯曲、失调和台阶)下的仿真分析。研究结果表明,这些分析对于电梯结构优化设计和动力学建模与分析有理论指导意义。 关键词:迟滞,参数辨识,非线性,动力学建模,系统仿真
机械工程测试技术基础
目录 1.简介 2.测试方案设计 3.测试系统组成 3.1压电加速度传感器 3.1.1组成 3.1.2工作原理 3.1.3灵敏度 3.2电荷放大器 3.2.1测试电路图 3.2.2数据计算处理 3.3动态信号分析仪 4.实验测试流程 5.说明总结 6.参考文献
压电加速度测试系统 1.简介 现代工业和自动化生产过程中,非电物理量的测量和控制技术会涉及大量的动态测试问题。所谓动态测试是指量的瞬时值以及它随时间而变化的值的确定,即被测量为变量的连续测量过程。它以动态信号为特征,研究了测试系统的动态特性问题,而动态测试中振动和冲击的精确测量尤其重要。振动与冲击测量的核心是传感器,常用压电加速度传感器来获取冲击和振动信号。 压电式传感器是基于某些介质材料的压电效应,当材料受力作用而变形时,其表面会有电荷产生,从而实现非电量测量。压电式传感器具有体积小,质量轻,工作频带宽,结构简单,成本低,性能稳定等特点,因此在各种动态力、机械冲击与振动的测量以及声学、医学、力学、宇航等方面都得到了非常广泛的应用。 所以在此设计了一种压电式加速度测试系统,能够满足测试0—3G的低频率加速度测试。 2.测试方案设计 系统组成:压电加速度传感器、电荷放大器、动态信号分析仪 被测对象的振动加速度信号经传感器拾振,由传感器电缆将加速度信号送入该系统电荷放大器,电荷放大器将信号转换成电压信号并放大,通过数据采集测试仪采样,便实现对信号的采集。
最后在PC 端对实验数据进行处理并显示。 如下图所示 3.测试系统组成 3.1压电加速度传感器 3.1.1组成 由质量块、压电元件、支座以及引线组成 如下图所示 3.1.2工作原理 压电加速度传感器采用具有压电效应的压电材料作基本元件,是以压电材料受力后在其表面产生电荷的压电效应为转换原理的传感器。这些压电材料,当沿着一定方向对其施力而使它变形时,内部就产生极化现象 ,同时在它的两个相对的表面上便 产生符号相反的电荷;当外力去掉后,又重新恢复不带电的状质压电 元件支座输出引线
Record the situation and lessons learned, find out the existing problems and form future countermeasures. 姓名:___________________ 单位:___________________ 时间:___________________ 大学物理重力加速度的测定实 验报告
编号:FS-DY-20118 大学物理重力加速度的测定实验报告 一、实验任务 精确测定银川地区的重力加速度 二、实验要求 测量结果的相对不确定度不超过5% 三、物理模型的建立及比较 初步确定有以下六种模型方案: 方法一、用打点计时器测量 所用仪器为:打点计时器、直尺、带钱夹的铁架台、纸带、夹子、重物、学生电源等. 利用自由落体原理使重物做自由落体运动.选择理想纸带,找出起始点0,数出时间为t的p点,用米尺测出op的距离为h,其中t=0.02秒×两点间隔数.由公式h=gt2/2得g=2h/t2,将所测代入即可求得g. 方法二、用滴水法测重力加速度
调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法三、取半径为r的玻璃杯,内装适当的液体,固定在旋转台上.旋转台绕其对称轴以角速度ω匀速旋转,这时液体相对于玻璃杯的形状为旋转抛物面 重力加速度的计算公式推导如下: 取液面上任一液元a,它距转轴为x,质量为m,受重力mg、弹力n.由动力学知: ncosα-mg=0 (1) nsinα=mω2x (2) 两式相比得tgα=ω2x/g,又tgα=dy/dx,∴dy=ω2xdx/g,∴y/x=ω2x/2g. ∴ g=ω2x2/2y. .将某点对于对称轴和垂直于对称轴最低点的直角坐标系的坐标x、y测出,将转台转速ω代入即可求得g. 方法四、光电控制计时法 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出
<<综合课程设计>> 课程设计报告 题目:加速度测量仪的设计专业:电子信息工程 年级:2010级 学号: 学生姓名: 联系电话: 指导老师: 完成日期:2013年 12月10日
摘要 利用ADXL345模块、STC89C52RC、LCD1602、12MHZ晶振等元件,制作加速度测量仪,实现能够测量静态下的重力加速度值和物体的倾角。经测试,系统达到课程设计的基本要求,具有易于操作,制作成本低的优点。 关键词:ADXL345模块;STC89C52RC;LCD1602;加速度测量仪;重力加速度;倾角
ABSTRACT Using the ADXL345 module, STC89C52RC, LCD1602, 12MHZ crystal element, making acceleration measurement instrument, and can dip angle acceleration of gravity measuring static values and objects. After testing, the system to meet the basic requirements of curriculum design, has the advantages of easy operation, advantages of low production cost. Key Words:the ADXL345 module; STC89C52RC; LCD1602; accelerometer; gravity acceleration; angle