汇编语言小程序记录鼠标路径
- 格式:docx
- 大小:17.89 KB
- 文档页数:2
快速获取鼠标位置的方法获取鼠标位置是在计算机编程和用户界面设计中常见的需求。
无论是为了实现鼠标操作的交互功能,还是为了监测和记录鼠标的移动轨迹或点击位置,都需要能够快速准确地获取鼠标的当前位置。
本文将介绍一些常用的方法和技术,帮助开发者快速获取鼠标位置。
1.使用系统API在不同的编程语言和操作系统中,都提供了相应的API函数来获取鼠标位置。
例如,在Windows平台上,可以使用Win32 API的GetCursorPos函数来获取鼠标的屏幕坐标。
在MacOS平台上,可以使用Cocoa框架提供的NSEvent类的locationInWindow方法来获取鼠标的窗口坐标。
2.监听鼠标事件除了主动地获取鼠标位置,还可以通过监听鼠标事件来实时获取鼠标位置。
这种方法适用于需要实时追踪鼠标移动的场景。
通过注册系统提供的鼠标事件回调函数或者使用第三方库来监听鼠标事件,可以获取鼠标移动和点击的事件信息,从中提取出鼠标位置。
3.使用JavaScript获取鼠标位置在Web开发中,可以使用JavaScript来获取鼠标位置。
通过监听鼠标移动事件或者点击事件,可以使用event对象提供的clientX和clientY属性来获取鼠标相对于浏览器窗口的坐标。
如果需要获取鼠标相对于整个文档页面的坐标,则可以使用event对象的pageX和pageY 属性。
需要注意的是,不同浏览器可能会有差异,需要进行兼容性处理。
4.使用跨平台工具为了跨平台地获取鼠标位置,可以使用一些针对多个操作系统的跨平台工具。
这些工具一般是基于底层系统API实现的,提供了一致的接口和方法来获取鼠标位置。
例如,AutoHotkey是一个Windows平台上常用的跨平台工具,可以通过编写脚本来实现鼠标位置的获取。
5.使用第三方库和框架为了简化开发过程和提供更高级的功能,可以使用一些专门的第三方库和框架。
这些库和框架往往提供了更抽象和易用的接口,封装了底层的API调用。
如何进行代码追踪和日志记录代码追踪和日志记录是软件开发过程中非常重要的环节。
通过追踪代码执行过程和记录日志,可以帮助我们分析和解决问题,改善软件性能,并增强对系统的监控和调试能力。
本文将介绍如何进行代码追踪和日志记录,以及其在软件开发中的应用。
一、代码追踪代码追踪是指通过记录代码的执行路径和调用关系,以便分析代码的执行过程。
下面是一些常用的代码追踪方法:1. 方法注入(Method Injection):通过在关键方法中插入代码,记录方法的调用顺序和参数,以及返回结果。
这种方法可以手动实现,也可以使用一些开源工具,如AspectJ。
2. 调试器(Debugger):调试器是软件开发中常用的工具,可以在开发过程中对代码进行单步调试,并观察代码的执行过程。
通过设置断点和查看变量的值,我们可以准确地追踪代码的执行。
3. 日志框架(Logging Framework):许多编程语言都提供了日志框架,如Java的Log4j和Python的logging模块。
通过在代码中插入日志语句,我们可以记录代码的执行过程、关键变量的值、异常信息等。
二、日志记录日志记录是指将系统运行时的信息记录下来,以便进行监控、故障排查和性能优化。
下面是一些常用的日志记录方法:1. 标准输出(Standard Output):将日志信息输出到控制台,可以通过调试器或命令行查看。
这种方法简单直接,适合开发和调试阶段。
但是,在生产环境中使用标准输出会影响性能,因此通常不建议在正式发布版本中使用。
2. 文件日志(File Logging):将日志信息输出到文件中,可以通过文本编辑器或专门的日志查看工具进行查看。
文件日志可以配置日志的级别(如DEBUG、INFO、WARN、ERROR等),以便在不同场景下控制日志输出的详细程度。
3. 数据库日志(Database Logging):将日志信息保存到数据库中,可以结合数据库查询语言进行高级查询和分析。
汇编语言各种指令的解释与用法汇编语言是一种低级语言,通过编写汇编程序可以直接操作计算机硬件。
在汇编语言中,各种指令起到了关键的作用。
本文将对常用的汇编语言指令进行解释,并说明其用法。
1. 数据传输指令数据传输指令用于在存储器和寄存器之间传输数据。
常用的数据传输指令包括MOV、PUSH和POP。
- MOV指令用于将数据从一个位置传送到另一个位置。
语法格式为:MOV 目的地,源。
- PUSH指令用于将数据压入栈中。
语法格式为:PUSH 寄存器/内存地址。
- POP指令用于从栈中弹出数据并存放到指定位置。
语法格式为:POP 寄存器/内存地址。
2. 算术运算指令算术运算指令用于进行各种算术运算,如加法、减法、乘法和除法。
常用的算术运算指令有ADD、SUB、MUL和DIV。
- ADD指令实现两个操作数的加法。
语法格式为:ADD 目的操作数,源操作数。
- SUB指令实现两个操作数的减法。
语法格式为:SUB 目的操作数,源操作数。
- MUL指令实现两个操作数的乘法。
语法格式为:MUL 操作数。
- DIV指令实现两个操作数的除法。
语法格式为:DIV 操作数。
3. 分支控制指令分支控制指令用于根据条件来选择不同的执行路径,包括条件跳转和无条件跳转。
常用的分支控制指令有JMP、JZ、JE和JNE。
- JMP指令用于无条件跳转到指定的地址。
语法格式为:JMP 标号/偏移量。
- JZ指令用于在零标志位为1时跳转到指定地址。
语法格式为:JZ标号/偏移量。
- JE指令用于在相等标志位为1时跳转到指定地址。
语法格式为:JE 标号/偏移量。
- JNE指令用于在不相等标志位为1时跳转到指定地址。
语法格式为:JNE 标号/偏移量。
4. 逻辑运算指令逻辑运算指令用于实现与、或、非、异或等逻辑运算。
常用的逻辑运算指令有AND、OR、NOT和XOR。
- AND指令用于执行按位与运算。
语法格式为:AND 目的操作数,源操作数。
- OR指令用于执行按位或运算。
汇编常用命令总结汇编语言是一种底层的计算机语言,通过使用汇编命令对机器指令进行编写和控制。
在学习和使用汇编语言时,掌握常用的汇编命令非常重要。
以下是汇编常用命令的详细总结:1.MOV:将数据从一个位置复制到另一个位置。
例如,将数据从寄存器复制到内存或者将数据从内存复制到寄存器。
2.ADD:将两个数相加,并将结果保存在目标位置。
可以用于寄存器之间的相加或者将寄存器和内存中的数据相加。
3.SUB:从一个数中减去另一个数,并将结果保存在目标位置。
与ADD命令类似,可以用于寄存器之间或者寄存器和内存之间的相减。
4.CMP:比较两个数,一些条件下,设置标志位用于后续的条件分支。
例如,当两个数相等时,设置零标志位。
6.JE、JNE、JG、JL、JA等:基于条件进行转移。
例如,JE用于当ZF标志位被设置为1时,跳转到指定位置,即上一次比较的结果是相等的。
7.AND、OR、XOR:对两个数位进行逻辑运算,并将结果保存在目标位置。
AND用于逻辑与运算,OR用于逻辑或运算,XOR用于逻辑异或运算。
8.NOT:对一个数位取反。
9.PUSH:将数据压入栈顶。
用于将寄存器、内存中的数据或者立即数压入栈中。
10.POP:从栈顶弹出数据。
用于将栈中的数据弹出到寄存器或者内存中。
11.CALL:调用子程序或函数。
将当前的程序状态保存到栈上,并跳转到子程序的入口地址。
12.RET:从子程序中返回。
将存储在栈上的返回地址弹出,恢复程序的现场,并返回到调用者。
13.LOOP:循环指令。
根据计数寄存器的值,重复执行指定的循环代码。
14.MOVZX:将一个无符号字节或无符号字进行零扩展,转换为更大的数据类型。
15.MOVSX:将一个有符号字节或有符号字进行符号扩展,转换为更大的数据类型。
16.LEA:将一个偏移地址加载到寄存器中。
17.INC、DEC:递增或递减寄存器或内存中的值。
18.NOP:空操作。
用于占位或延时。
19.INT:软中断。
如何记忆鼠标轨迹的方法
要记忆鼠标轨迹,你可以使用以下方法:
1. 观察:首先观察鼠标在屏幕上移动的路径和模式。
注意鼠标移动的速度、方向、停留的时间以及点击的位置等。
2. 重复练习:多次重复练习鼠标在屏幕上的移动轨迹,并尝试尽可能准确地再现。
可以使用绘图工具或鼠标轨迹记录软件来记录和回放自己的鼠标移动。
3. 分解图案:将复杂的鼠标移动轨迹拆分成简单的部分,逐个练习记忆和再现。
比如,先练习直线的移动,然后再逐步增加角度和曲线。
4. 使用联想:尝试将鼠标移动与某种图形、数字或字母进行联想,以帮助记忆。
例如,将鼠标的移动路径想象成一只动物或一个物体等。
5. 创造关联:与鼠标轨迹相关联的记忆方法可能更容易记忆。
例如,如果鼠标移动是完成一个特定任务的步骤,那么与该任务相关的其他信息可能会帮助你更好地记忆鼠标轨迹。
6. 深度理解:理解鼠标在屏幕上移动的逻辑和原因,例如点击、拖拽、选择等操作的目的和结果,有助于更好地记忆和再现鼠标轨迹。
7. 多样化练习:尝试在不同的屏幕上、不同的应用程序中练习鼠标轨迹记忆,以增加对不同环境和操作的适应能力。
记忆鼠标轨迹需要耐心和重复练习,通过不断练习和使用,你的鼠标移动技能和记忆能力会逐渐提高。
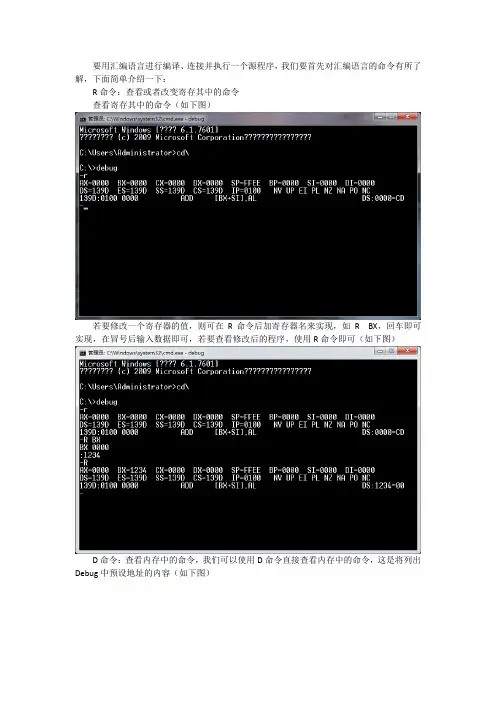
要用汇编语言进行编译、连接并执行一个源程序,我们要首先对汇编语言的命令有所了解,下面简单介绍一下:R命令:查看或者改变寄存其中的命令查看寄存其中的命令(如下图)若要修改一个寄存器的值,则可在R命令后加寄存器名来实现,如R BX,回车即可实现,在冒号后输入数据即可,若要查看修改后的程序,使用R命令即可(如下图)D命令:查看内存中的命令,我们可以使用D命令直接查看内存中的命令,这是将列出Debug中预设地址的内容(如下图)后程序将列出从指定单元开始的128个内存单元中的内容(如下图)使用D命令还可以指定查看内容,如D 2000:0 9,即可查看2000~2009中的内容U命令:查看机器码所对应的汇编指令,即进行反编译T命令:单步执行程序中的每一条指令下面进行简单程序的编译、连接以及运行1.写出相应的源程序,可以用任意文本编辑器(如记事本、word)编写源程序,还可以使用DOS下的Edit。
在这里要说明的是,源程序变下完成后,我们可以将后缀名改为“.asm”(因为我们使用的是微软的masm汇编编译器),也可以不进行修改,在编译时,只要输入它的全名即可a.使用DOS下的Edit编辑源程序(如下)b.使用记事本编辑源程序2.运用“cmd”(选择“开始”菜单下的“运行”命令,在其中输入“cmd即可”)命令,进入到C盘根目录(如下图)3.现在开始利用masm对源程序进行编译(若文件在当前目录下,只要输入其文件名即可(如下图3.1),若文件在其他路径下,则要输入其路径(如下图3.2))图3.1图3.1图3.2图3.24.对生成的目标文件进行连接(如Link Y.obj)从而得到可执行文件(若文件在当前目录下,只要输入其文件名即可(如下图4.1),若文件在其他路径下,则要输入其路径(如下图4.2))图4.1图4.1图4.2图4.2下面再说一种方便快捷的方式进行编译、连接对于编译来说,即在masm后加上源程序的路径,文件名,在命令的末尾加上分号即可(如下图)对于连接来说,即在Link后加上源程序的路径,文件名,在命令的末尾加上分号即可(如下图)以上呢,就是源程序的编译、连接,现在让我们运行可执行文件,即在提示符后输入debug Y.exe(如下图1),在前面我们已经对汇编命令进行介绍,现在让我们使用R命令来查看寄存器中的内容(如下图2)图1我们还可以使用U命令对程序进行反编译,从而得到我们熟悉的汇编语言(如下图)使用T命令执行程序中的每一条指令(如下图)还可以使用G命令(如下图)直接将程序执行完使用Q命令退出Debug(如下图)。
获取光标位置并输入文本的方法
获取光标位置并输入文本是在计算机编程中常见的操作,具体
的方法取决于你所使用的编程语言和平台。
在大多数编程语言和平
台中,可以通过调用相应的API或函数来实现这一功能。
在许多图形用户界面(GUI)应用程序中,可以使用鼠标事件来
获取光标位置。
例如,在使用Java编程语言开发的GUI应用程序中,可以通过监听鼠标事件来获取光标位置。
一旦获取了光标位置,就
可以使用相应的API来在指定位置插入文本。
在Web开发中,可以使用JavaScript来获取光标位置并插入文本。
可以通过监听鼠标事件或键盘事件来获取光标位置,然后使用JavaScript的DOM操作来插入文本。
在一些桌面应用程序开发框架中,例如Electron或WPF,也有
特定的方法来获取光标位置并插入文本。
总的来说,获取光标位置并输入文本的方法取决于你所使用的
编程语言和平台。
需要注意的是,在进行这些操作时,要确保用户
体验良好,不要干扰用户的正常操作。
测试鼠标轨迹的方法鼠标轨迹是指鼠标在屏幕上的移动路径,通过测试鼠标轨迹可以了解用户在使用电脑时的操作习惯和行为特征。
这对于用户体验研究、人机交互设计、数据分析等方面都有重要意义。
下面将介绍一些常用的测试鼠标轨迹的方法。
一、定点测试法定点测试法是最基本的一种测试鼠标轨迹的方法。
测试者需要按照预定的点逐一点击,然后观察鼠标在移动过程中的轨迹。
通过这种方法可以了解到测试者在点击不同点时鼠标的移动方式、速度、路径等信息。
二、自由测试法自由测试法是一种较为灵活的测试方法。
测试者可以在屏幕上自由移动鼠标,进行各种操作,比如点击、拖拽、滚动等。
在测试过程中,可以记录下鼠标的移动路径,并对其进行分析。
这种方法可以更好地模拟用户的实际操作情况,得到更真实的鼠标轨迹数据。
三、任务测试法任务测试法是通过给测试者一些具体的任务,观察其完成任务时鼠标的移动轨迹。
这种方法可以更好地了解用户在完成不同任务时的操作习惯和行为特征。
比如,在一个网页设计的测试中,可以要求测试者点击某个按钮、填写某个表单等,然后观察他们的鼠标轨迹。
四、眼球追踪技术眼球追踪技术是一种通过追踪测试者的眼球运动来获取鼠标轨迹数据的方法。
通过这种技术可以更准确地了解用户的视觉关注点和注意力分布,进而优化用户界面设计。
眼球追踪技术通常需要使用专门的设备和软件,并且需要对测试者进行培训和指导。
五、数据分析方法除了以上几种测试方法,数据分析方法也是测试鼠标轨迹的重要手段之一。
通过收集大量的鼠标轨迹数据,并运用统计学和机器学习等方法进行分析,可以发现隐藏在数据背后的规律和模式。
例如,可以通过聚类分析来划分不同类型的鼠标轨迹,通过关联规则挖掘来发现鼠标操作的关联性等。
总结起来,测试鼠标轨迹的方法包括定点测试法、自由测试法、任务测试法、眼球追踪技术和数据分析方法等。
每种方法都有其独特的优势和适用场景,可以根据具体的需求选择合适的方法进行测试。
通过测试鼠标轨迹,可以更好地理解用户的操作习惯和行为特征,为用户体验研究和人机交互设计提供有效的支持。
VSCode实现代码追踪与日志记录现代软件开发过程中,代码追踪和日志记录是非常重要的工具和技术。
追踪代码可以帮助开发人员定位bug和问题,而日志记录则是用于记录系统运行时的信息,以便后续的调试和分析。
在本文中,我们将探讨如何使用VSCode实现代码追踪和日志记录,以提高开发效率和代码质量。
一、VSCode的基本配置和插件安装在开始使用VSCode进行代码追踪和日志记录之前,我们首先需要进行一些基本的配置和插件安装。
请按照以下步骤进行操作:1. 下载并安装VSCode在官方网站上下载适用于您操作系统的VSCode,并按照提示进行安装。
2. 打开VSCode并进行基本配置打开VSCode后,首先需要进行一些基本的配置,如选择主题、设置主题配色和编辑器字体等。
在菜单栏中找到“文件”→“首选项”→“设置”,在弹出的设置页面中进行相应的配置。
3. 安装必要的插件VSCode提供了丰富的插件生态系统,我们需要安装一些插件来实现代码追踪和日志记录功能。
根据您的开发需求,可以选择安装以下插件:- Debugger for Chrome:用于调试JavaScript、TypeScript和Node.js代码的插件。
- Python:用于调试和编写Python代码的插件。
- Go:用于调试和编写Go语言代码的插件。
- Java Debugger (GraalVM):用于调试和编写Java代码的插件。
安装过程中,请确保插件已经正确安装并启用。
您可以在VSCode的插件商店中搜索插件名称并按照提示进行安装。
二、代码追踪相关操作在VSCode中,我们可以使用各种调试器来实现代码追踪的功能。
以下是一些常见的代码追踪操作:1. 设置断点断点是调试代码时非常有用的工具,我们可以在代码中设置断点,使得代码在执行到某个特定位置时暂停。
在代码编辑器中找到想要设置断点的行,单击行号即可设置断点。
2. 启动调试在您的代码中设置断点后,可以通过按下F5键来启动调试过程。
汇编语言小程序例子作为一种低级语言,汇编语言在计算机编程中起着重要的作用。
它能够直接操作计算机的硬件资源,具有高效性和灵活性。
下面我将介绍一些汇编语言的小程序例子,让我们来了解一下。
1. 计算两个数的和```assemblysection .datanum1 db 10num2 db 20result db 0section .textglobal _start_start:mov al, [num1] ; 将num1的值移动到寄存器AL中add al, [num2] ; 将num2的值加到AL寄存器中mov [result], al ; 将AL寄存器中的结果保存到result变量中mov eax, 1 ; 将1存入寄存器EAX,表示要打印到标准输出 mov ebx, 1 ; 将1存入寄存器EBX,表示标准输出文件描述符mov ecx, result ; 将result的地址存入寄存器ECX,表示要打印的内容mov edx, 1 ; 将1存入寄存器EDX,表示要打印的内容长度 int 0x80 ; 调用系统调用,输出结果到屏幕mov eax, 1 ; 将1存入寄存器EAX,表示退出程序xor ebx, ebx ; 清空寄存器EBXint 0x80 ; 调用系统调用,退出程序```以上是一个简单的汇编语言程序,用于计算两个数的和。
首先,我们在`.data`段定义了三个变量:`num1`、`num2`和`result`。
然后,在`.text`段通过指令将变量的值加载到寄存器中,并进行加法运算。
接下来,使用系统调用输出结果到屏幕,并通过系统调用退出程序。
2. 判断一个数是否为质数```assemblysection .datanum db 17isPrime db 1section .textglobal _start_start:mov ecx, 2 ; 从2开始除cmp ecx, num ; 比较ecx和num的值jg printResult ; 如果ecx大于num,则跳转到printResult标签loopStart:mov eax, numxor edx, edxdiv ecx ; 将num除以ecx的结果保存在eax,余数保存在edxcmp edx, 0 ; 比较余数是否为0je setNotPrime ; 如果余数为0,则num不是质数,设置isPrime 为0inc ecx ; ecx自增1cmp ecx, num ; 比较ecx和num的值jle loopStart ; 如果ecx小于等于num,则跳转到loopStart标签printResult:mov eax, 4 ; 将4存入寄存器EAX,表示要打印到标准输出 mov ebx, 1 ; 将1存入寄存器EBX,表示标准输出文件描述符mov ecx, isPrime ; 将isPrime的地址存入寄存器ECX,表示要打印的内容mov edx, 1 ; 将1存入寄存器EDX,表示要打印的内容长度 int 0x80 ; 调用系统调用,输出结果到屏幕mov eax, 1 ; 将1存入寄存器EAX,表示退出程序xor ebx, ebx ; 清空寄存器EBXint 0x80 ; 调用系统调用,退出程序setNotPrime:mov byte [isPrime], 0 ; 将isPrime设置为0jmp printResult ; 跳转到printResult标签,输出结果```以上程序用于判断一个数是否为质数。
单个红光电对管用51汇编语言编程寻迹程序/*******************************************************************/ /* 广州双龙电子接线方法:光电管安装在小车前方中间,数据线插在J11插座,即P2.6控制信号线功能:单个红光电对管寻迹LED4~5是前进指示灯;LED1~3是左转弯指示灯;LED6~8是右转弯指示灯Chip type : AT89S52Clock frequency : 24MHz*//********************************************************************/ ORG 0000HLJMP mainORG 0030Hdelay_10ms: ;10毫秒延时子程序MOV R2,#0AH ;取延时外循环数10D2: MOV R1,#0FAH ;取延时内循环数250D1: DJNZ R1 ,D1DJNZ R2, D2RETforward: ;前进子程序MOV P0,#0E7H ;方向指示灯LED4~5亮MOV P3,#50H ;前进RETleft: ;左转弯子程序MOV P0,#0F8H ;方向指示灯LED1~3亮MOV P3,#60H ;左转RETmain:JNB P2.6,panduan ;判断是否检测到黑线LCALL forward ;调用前进子程序MOV R4,#01H ;检测到黑线标志位置1LCALL delay_10ms ;延时10毫秒SJMP mainpanduan:MOV A,R4XRL A,#01H ;黑线标志位是否置一JNZ qianjin ;如果原来是没有检测到黑线的,就继续前进寻找MOV A,R5XRL A,#01HJNZ qianjin ;白线标志位是否置一,如果非,就前进zuozhuan:JB P2.6,clear ;如果检测到黑线就清黑白线标志位.返回主函数LCALL left ;调用左转子程序LCALL delay_10ms ;延时10毫秒SJMP zuozhuan ;如果没有检测到黑线就继续转弯检测clear:MOV R4,#00MOV R5,#00 ;清黑,白线标志位SJMP main ;返回主函数qianjin:LCALL forward ;调用前进子程序MOV R5,#01H ;白线标志位置1LCALL delay_10ms ;延时10毫秒SJMP main ;返回主函数end ;结束两个红光电对管用51汇编语言编程寻迹程序/******************************************************************** ************//*广州双龙电子接线方法:两个光电管并排在小车前方中间,左光电管插在J12插座,右光电管插在J10插座,即P2.7,P2.5控制信号线功能:两个红光电对管寻迹LED4~5是前进指示灯;LED1~3是左转指示灯;LED6~8右转指示灯Chip type : AT89S52Clock frequency : 24MHz*//******************************************************************** ***********/ORG 0000HLJMP mainORG 0030Hdelay_50ms: ;50毫秒延时子程序MOV R2,#64H ;取延时外循环数100D2: MOV R1,#0FAH ;取延时内循环数250D1: DJNZ R1 ,D1 ;内循环,累减一,DJNZ R2, D2 ;外循环,累减一RETdelay_100ms: ;100毫秒延时子程序MOV R3,#2H ;R3值取2D3: ACALL delay_50ms ;调用50毫秒延时DJNZ R3,D3 ;循环,累减一RETforward: ;前进子程序MOV P0,#0E7H ;方向指示灯LED4~5亮MOV P3,#50H ;前进RETleft: ;左转弯子程序MOV P0,#0F8H ;方向指示灯LED1~3亮MOV P3,#60H ;左转弯RETright: ;右转弯子程序MOV P0,#01FH ;方向指示灯LED6~8亮MOV P3,#90H ;右转弯RETmain: ;主函数JNB P2.7,youzhuanJNB P2.5,youzhuan ;左,右都检测到黑线,前进LCALL forwardLCALL delay_100ms ;延时100毫秒MOV P3,#00LCALL delay_50msSJMP mainyouzhuan:JNB P2.7,zuozhuanLCALL right ;左光电管检测到黑线,右转弯LCALL delay_100msMOV P3,#00LCALL delay_50msSJMP mainzuozhuan:JNB P2.5,qianjinLCALL left ;右光电管检测到黑线,左转弯LCALL delay_100msMOV P3,#00LCALL delay_50msSJMP mainqianjin:LCALL forward ;前进LCALL delay_100msMOV P3,#00LCALL delay_50msSJMP main ;返回主函数END3个红光电对管用51汇编语言编程寻迹程序/******************************************************************** *******************//* 广州双龙电子一个光电管按装在小车前中间,两个光电管并排在中间光电管的两边,与中间光电管成60度角;中间光电管插在J11插座,左光电管插在J12插座,右光电管插在J10插座,P2.7,P2.6,P2.5分别检测左中右三个光电管功能:三个红光电对管寻迹LED4~5是前进指示灯;LED1~3是左转指示灯;LED6~8右转指示灯Chip type : AT89S52Clock frequency : 24MH*//******************************************************************** *******************/ORG 0000HLJMP mainORG 0030Hdelay_100ms: ;100毫秒延时子程序MOV R2,#0C8H ;取延时外循环数200D2: MOV R1,#0FAH ;取延时内循环数250D1: DJNZ R1 ,D1 ;内循环,累减一,DJNZ R2, D2 ;外循环,累减一RETdelay_300ms: ;秒延时子程序MOV R3,#03H ;R3值取3D3: ACALL delay_100ms ;调用100毫秒延时DJNZ R3,D3 ;循环,累减一RETforward: ;前进子程序MOV P0,#0E7H ;方向指示灯LED4~5亮MOV P3,#50H ;前进RETleft: ;左转弯子程序MOV P0,#0F8H ;方向指示灯LED1~3亮MOV P3,#60H ;左转弯RETright: ;右转弯子程序MOV P0,#1FH ;方向指示灯LED6~8亮MOV P3,#90H ;右转弯RETback: ;后退子程序MOV P0,#00 ;方向指示灯8LED全亮MOV P3,#0A0H ;后退RETmain:JNB P2.7,panduan ;左光电管是否检测到黑线,JB P2.6,qianjin ;如果左,右光电管都检测到黑线,则前进JNB P2.5,zuozhuan ;左光电管检测到黑线,右则没有检测到,则左转qianjin:LCALL forward ;前进LCALL delay_100ms ;延时100毫秒MOV P3,#00 ;小车停100毫秒,消除惯性LCALL delay_100msSJMP main ;返回主函数zuozhuan:LCALL left ;左转LCALL delay_100ms ;延时100毫秒MOV P3,#00LCALL delay_100msSJMP main ;返回主函数panduan:JNB P2.5,qianjin ;如果左,中光电管都没检测到黑线,则前进JB P2.7,qianjin ;中,右光电管检测到黑线,则前进JNB P2.6,youzhuan ;右转LCALL forward ;前进LCALL delay_100ms ;延时100毫秒MOV P3,#00LCALL delay_100msSJMP main ;返回主函数youzhuan: ;右转LCALL right ;延时100毫秒LCALL delay_100msMOV P3,#00LCALL delay_100msSJMP main ;返回主函数END ;结束不成功ORG 0000HLJMP mainORG 0030Hdelay_100ms: ;100毫秒延时子程序MOV R2,#0C8H ;取延时外循环数200D2: MOV R1,#0FAH ;取延时内循环数250 D1: DJNZ R1 ,D1 ;内循环,累减一,DJNZ R2, D2 ;外循环,累减一RETdelay_300ms: ;秒延时子程序MOV R3,#03H ;R3值取3D3: ACALL delay_100ms ;调用100毫秒延时DJNZ R3,D3 ;循环,累减一RETforward: ;前进子程序MOV P0,#0E7H ;方向指示灯LED4~5亮MOV P3,#50H ;前进RETleft: ;左转弯子程序MOV P0,#0F8H ;方向指示灯LED1~3亮MOV P3,#60H ;左转弯RETright: ;右转弯子程序MOV P0,#1FH ;方向指示灯LED6~8亮MOV P3,#90H ;右转弯RETback: ;后退子程序MOV P0,#00 ;方向指示灯8LED全亮MOV P3,#0A0H ;后退RETmain:JNB P1.2,panduan ;左光电管是否检测到黑线,JB P1.1,qianjin ;如果左,右光电管都检测到黑线,则前进JNB P1.0,zuozhuan ;左光电管检测到黑线,右则没有检测到,则左转qianjin:LCALL forward ;前进LCALL delay_100ms ;延时100毫秒MOV P3,#00 ;小车停100毫秒,消除惯性LCALL delay_100msSJMP main ;返回主函数zuozhuan:LCALL left ;左转LCALL delay_100ms ;延时100毫秒MOV P3,#00LCALL delay_100msSJMP main ;返回主函数panduan:JNB P1.0,qianjin ;如果左,中光电管都没检测到黑线,则前进JB P1.2,qianjin ;中,右光电管检测到黑线,则前进JNB P1.1,youzhuan ;右转LCALL forward ;前进LCALL delay_100ms ;延时100毫秒MOV P3,#00LCALL delay_100msSJMP main ;返回主函数youzhuan: ;右转LCALL right ;延时100毫秒LCALL delay_100msMOV P3,#00LCALL delay_100msSJMP main ;返回主函数END ;结束三个传感LJMP mainORG 0030Hdelay_100ms: ;100毫秒延时子程序MOV R2,#0C8H ;取延时外循环数200D2: MOV R1,#0FAH ;取延时内循环数250D1: DJNZ R1 ,D1 ;内循环,累减一,DJNZ R2, D2 ;外循环,累减一RETdelay_300ms: ;秒延时子程序MOV R3,#03H ;R3值取3D3: ACALL delay_100ms ;调用100毫秒延时DJNZ R3,D3 ;循环,累减一RETforward: ;前进子程序MOV P3,#50H ;前进RETleft: ;左转弯子程序MOV P3,#60H ;左转弯RETright: ;右转弯子程序MOV P3,#90H ;右转弯RETmain:JNB P1.2,panduan ;左光电管是否检测到黑线,JB P1.1,qianjin ;如果左,右光电管都检测到黑线,则前进JNB P1.0,zuozhuan ;左光电管检测到黑线,右则没有检测到,则左转qianjin:LCALL forward ;前进LCALL delay_100ms ;延时100毫秒MOV P3,#00 ;小车停100毫秒,消除惯性LCALL delay_100msSJMP main ;返回主函数zuozhuan:LCALL left ;左转LCALL delay_100ms ;延时100毫秒MOV P3,#00LCALL delay_100msSJMP main ;返回主函数panduan:JNB P1.0,qianjin ;如果左,中光电管都没检测到黑线,则前进JB P1.2,qianjin ;中,右光电管检测到黑线,则前进JNB P1.1,youzhuan ;右转LCALL forward ;前进LCALL delay_100ms ;延时100毫秒MOV P3,#00LCALL delay_100msSJMP main ;返回主函数youzhuan: ;右转LCALL right ;延时100毫秒LCALL delay_100msMOV P3,#00LCALL delay_100msSJMP main ;返回主函数END ;结束。
汇编语言工具软件的使用一、实验目的:掌握MASM、LINK、DEBUG、EDIT软件的使用。
二、实验要求:通过编辑、编译、连接、调试一个汇编语言程序,掌握整个过程的步骤和方法。
三、实验步骤:1.打开EditPlus,输入源程序代码,并保存到D盘下的masm文件夹以asctobcd .asm命名2.点击“开始——运行”,输入cmd按回车键,进入汇编程序窗口。
3.输入d: 按回车转到d盘目录下,然后输入cd masm 按回车,再输入masmasctobcd回车从而对此文件进行编译。
4.从上面的截图我们可以看到,编译的过程中发生了两处错误(在源程序文件的第3行和第9行),回到我们刚才保存过的asctobcd .asm文件。
检查后可以得知第3行中“8dup”之间少了一个空格,第9行“ax.ax”之间应该为逗号,修改过来再保存。
5.重新按照第2步和第3步的要求,做的结果如下:6.表明源程序通过了编译。
然后输入link asctobcd 对程序进行连接,连接无误后输入debug asctobcd.exe 按回车。
7.debug程序是以“-”做提示符等待键入命令的,要查看程序运行的情况,就必须首先用反汇编指令U来列出程序清单:其中最左边给出了指令所在的段地址:偏移地址,然后是机器语言指令,右边是汇编语言指令,指令中所有的符号都被具体的数据替代。
8.利用调试软件DEBUG装入二进制执行程序,通过连续运行、分段运行、单步运行,可以实现软件的剖析、查错、或修改。
此时可以输入“t”,进入单步运行,如图第3行列出了下一条将要执行的指令的地址、其机器语言指令和汇编语言指令。
9.输入d ds:0 指令可以显示当前的存储单元的内容,每行16个单元,每行右侧显示该16个单元的ASCII码字符,无字符对应的ASCII显示“.”10.如果使用了多次t命令显示的结果正确的话,就可以使用g 命令运行完整个程序。
所以输入g按回车,再输入 d ds:0 ,得到由上图表明程序已装入内存,程序运行状况良好。
记录⿏标的轨迹并回放的js代码遇到的问题:Question①:mousemove事件中,移动⽅法中会被记录很多的left和top,我只需要⼤概的⼏组数据就⾏,不需要那么多;Question②:回放的时候,在for循环⾥执⾏太快了,导致的效果就是直接看到开始跟结束位置,我想放慢中间的过程;搞了⼀个延迟的函数,但是还是没有实质性解决。
慢慢慢慢拖动⼩⽅块到⼀个新位置,然后松开⿏标,先点击“复位”,再点击“回放”查看所经过的路径,只有⼀次机会哦 - -|||复制代码代码如下://延迟⽅法sleep: function(n) {var start = new Date().getTime();while (true)if (new Date().getTime() - start > n)break;},//回看轨迹记录backTrack: function() {var oSlippage = document.getElementById("slippage");var len = this.X.length;for (var i = 0; i < len; i++) {oSlippage.style.left = this.X[i] - this.relativeX;oSlippage.style.top = this.Y[i] - this.relativeY;//延迟循环⽅法this.sleep(10);}}还是没有达到慢慢回放的效果,待解决。
啊哈,今早解决了~!不⽤for循环,通过定时器运⽤数组的下标来不断改变⼩⽅块的left和top复制代码代码如下://延迟⽅法sleep: function(n) {//var start = new Date().getTime();//while (true)// if (new Date().getTime() - start > n)// break;var oSlippage = document.getElementById("slippage");oSlippage.style.left = this.X[this.iNum] - this.relativeX; //iNum为数组下标oSlippage.style.top = this.Y[this.iNum] - this.relativeY;MOUSETRACKRECORD.iNum++;//如果下标⼤于了他的长度就停⽌回放if (this.iNum > this.X.length - 1) {clearInterval(this.timeID);}},//回看轨迹记录backTrack: function() {//var oSlippage = document.getElementById("slippage");//var len = this.X.length;//for (var i = 0; i < len; i++) {// oSlippage.style.left = this.X[i] - this.relativeX;// oSlippage.style.top = this.Y[i] - this.relativeY;// //延迟循环⽅法// this.sleep(10);//}this.timeID = setInterval("MOUSETRACKRECORD.sleep()", 10);}演⽰效果:全选注:引⼊外部Js需再刷新⼀下页⾯才能执⾏]⽅块 X: [], //X坐标 Y: [], //Y坐标 clickX: 0, //⿏标点击时的X坐标 clickY: 0, //⿏标点击时的Y坐标relativeX: 0, //⿏标相对⽅块的X坐标 relativeY: 0, //⿏标相对⽅块的Y坐标isCanMove: false, //是否可以移动 iNum: 0, //坐标XY数组的下标 timeID:null, //回放定时器 //⿏标按下的时候 mouseDown:function() { //⿏标点击时this.clickX =event.clientX; this.clickY= event.clientY; //获取⼩⽅块 var oSlippage =document.getElementById("slippage"); //获取div当前坐标(左边界和上边界)var divX =parseInt(oSlippage.style.left) || 0; var divY =parseInt(oSlippage.style.top) || 0; //获取⿏标相对div的坐标 this.relativeX =this.clickX - divX;this.relativeY =this.clickY - divY; //设置可以移动 this.isCanMove= true; }, //⿏标移动的时候 mouseMove:function() { if(this.isCanMove) { varoSlippage =document.getElementById("slippage");oSlippage.style.left =event.clientX -this.relativeX;oSlippage.style.top =event.clientY -this.relativeY; //移动就记录下⿏标的轨迹MOUSETRACKRECORD.startRecord(event.clientX, event.clientY); } }, //⿏标松开的时候 mouseUp:function() { //取消⼩⽅块。
keil汇编指定编译位置
"Keil汇编指定编译位置" 这个短语的意思是,在使用Keil软件进行汇编语言编程时,你需要指定代码的编译位置或位置。
Keil是一个流行的嵌入式开发环境,广泛用于微控制器和嵌入式系统的开发。
当你使用Keil进行汇编编程时,通常会有多种方式来指定编译位置:
1.程序位置:这指的是程序在内存中的起始地址。
在嵌入式系统中,这通常
指的是Flash存储器或RAM的起始地址。
2.数据位置:这指的是数据变量在内存中的位置。
例如,全局变量或静态变
量可能被放置在特定的内存区域。
3.链接脚本:Keil使用链接脚本文件来指定程序如何链接到目标硬件。
这个
文件可以定义程序的起始地址、RAM大小和位置以及其他与硬件相关的配置。
4.项目设置:在Keil的项目设置中,你可以指定程序的编译和链接选项,包
括程序的输出位置和位置范围。
5.汇编指令:在汇编代码中,你可以使用特定的指令来指定变量的位置,例
如使用.section指令来指定代码或数据应该放在哪个内存区域。
最后总结一下,"Keil汇编指定编译位置" 指的是在Keil环境中,使用各种工具和指令来指定汇编代码的编译和链接位置,以确保程序能够在目标硬件上正确运行。
codemirror计算光标位置的实现原理1. 引言1.1 背景介绍CodeMirror是一个基于JavaScript开发的代码编辑器,广泛应用于网页开发、代码编辑等领域。
在日常的代码编写过程中,光标位置的准确计算是非常重要的一项功能。
而CodeMirror正是通过一套精密的算法和数据结构来实现光标位置的准确计算。
本文将针对CodeMirror计算光标位置的实现原理进行深入探讨,分析其基本原理、数据结构设计、算法实现、性能优化以及实际应用场景等方面。
通过对这些内容的详细解析,可以帮助研究者更好地理解CodeMirror的工作原理,为今后的代码编辑器优化和开发提供有益的参考。
通过本文的研究,我们可以更好地了解如何通过算法和数据结构来实现准确计算光标位置的功能,为提升代码编辑器的性能和用户体验做出贡献。
【此处为200字内容,已完结】1.2 研究目的计算光标位置是编程编辑器中的一个重要功能,可以帮助开发人员在代码中准确定位光标位置,从而提高编码效率。
本研究的目的是探讨Codemirror计算光标位置的实现原理,通过分析其基本原理、数据结构设计、算法实现、性能优化以及实际应用场景,来深入理解这一功能的实现过程和优化方法。
在编程编辑器中,光标位置的准确计算是至关重要的,它直接影响到开发人员的编码体验和效率。
通过研究Codemirror计算光标位置的实现原理,我们可以更好地理解其内部工作机制,为开发人员提供更好的编程环境和体验。
通过对该功能的优化研究,可以进一步提升编辑器的性能和用户体验,为编程人员带来更高效的编程工具。
深入研究Codemirror计算光标位置的实现原理具有重要的理论和实践意义。
1.3 研究意义在计算光标位置的实现中,研究意义主要体现在以下几个方面:准确计算光标位置可以实现更精准的文本编辑操作。
在编程或文本处理过程中,我们经常需要对文本进行精细的修改,如果能够准确地定位光标位置,就可以更高效地进行编辑操作,提高工作效率。
python鼠标轨迹生成算法生成鼠标轨迹的算法通常涉及到以下几个步骤:1. 定义轨迹的起点和终点。
可以使用鼠标当前的位置作为起点,然后选择一个目标位置作为终点。
2. 定义轨迹的总时间或总长度。
根据需要生成轨迹的时长或路径长度,确定生成轨迹所需的总步数或速度。
3. 生成轨迹的形状。
根据需要生成的轨迹形状,可以选择使用不同的曲线或函数来描述轨迹的路径。
4. 计算每一步的位置。
根据轨迹形状和总步数,计算每一步的位置坐标,并生成轨迹序列。
5. 添加随机性。
为了增加轨迹的真实性,可以在计算每一步的位置时,添加一些随机性,使得轨迹看起来更加自然。
6. 应用轨迹序列。
将生成的轨迹序列应用到仿真器或控制硬件上,实现鼠标的运动。
下面是一个简单的示例代码,生成一个直线路径的鼠标轨迹:pythonimport randomdef generate_mouse_trajectory(start, end, total_steps):trajectory = []x0, y0 = startx1, y1 = enddx = (x1 - x0) / total_stepsdy = (y1 - y0) / total_stepsfor step in range(total_steps):x = x0 + dx * step + random.gauss(0, 1)y = y0 + dy * step + random.gauss(0, 1)trajectory.append((x, y))return trajectory# 使用示例start_point = (0, 0)end_point = (100, 100)total_steps = 100trajectory = generate_mouse_trajectory(start_point, end_point, total_steps)这个示例代码生成了一个从坐标(0, 0) 到(100, 100) 的直线轨迹,总共包含100 个点。
;TITLE DRAW--Program to draw on screen with
;cursor arrows,character write to video memory
;------------------------------------------------------------------------
read_c equ0h;read character word
key_rom equ16h;rom keyboard routine
up equ48h;scan code for up arrow
down equ50h;scan code for down arrow
right equ4dh;scan code for right arrow
left equ4bh;scan code for left arrow
block equ01h;solid graphics character
quit equ1bh;escape key
;************************************************************************* video segment at0b800h;define extra seg
wd_buff label w ord
v_buff db25*80*2 dup (?)
video ends
;************************************************************************* pro_nam segment;define code segment
;------------------------------------------------------------------------
main proc far;main part of program
assume cs:pro_nam,es:video
;set up stack for return
start:push d s;save ds
sub ax,ax;set ax to zero
push a x;put it on stack
;set es to extra segment
mov ax,video
mov es,ax
;clear screen by writing zeros to it
;even bytes get 0(characters)
;odd bytes get 7(normal"attribute")
mov cx,80*25
mov bx,0
clear:mov es:[wd_buff+bx],0700h
inc bx;increase pointer
inc bx;twice
loop clear;do again
;screen pointer will be in cx register
;row nuber(0 to 24 d)in ch
;column nuber(0 to 79d)in cl
;set screen pointer to center of screen
mov ch,12d;row divide by 2
mov cl,40d;column divide by2
;get character from keyboard,using rom bios routine
get_char:
mov ah,read_c;code for read char
int key_rom;keyboard i/o rom call
cmp al,quit;is it escape?
jz exit;yes
mov al,ah;put scan code in al
cmp al,up;is it up arrow?
jnz not_up;no
dec ch;yes,decrement row
not_up:
cmp al,down;is it down arrow?
jnz not_down;no
inc ch;yes,increase row
not_down:
cmp al,right;is it right arrow?
jnz not_right;no
inc cl;yes,increase column
not_right:
cmp al,left;is it left arrow?
jnz lite_it;no
dec cl;yes,decrement column
lite_it:
mov al,160d;bytes per row into al
mul ch;time of rows
;result in ax
mov bl,cl;of columns in bl
rol bl,1;times 2 to get bytes
mov bh,0;clear top part of bx
add bx,ax;add ax to it
;gives address offset
;address offset in bx. put block char there
mov al,block
mov es:[v_buff+bx],al
jmp get_char;get next arrow
exit:ret;return to dos
main endp;end of main part of program
;-----------------------------------------------------------------------
pro_nam ends;end of code segment
;*********************************************************************** end start;end assembly。