
机械原理第二版(朱理)作业答案
机械原理作业
第一章结构分析作业
1.2 解:
F = 3n-2P L-P H = 3×3-2×4-1= 0
该机构不能运动,修改方案如下图:
1.2 解:
(a)F = 3n-2P L-P H = 3×4-2×5-1= 1 A点为复合铰链。(b)F = 3n-2P L-P H = 3×5-2×6-2= 1
B、E两点为局部自由度, F、C两点各有一处为虚约束。
(c)F = 3n-2P L-P H = 3×5-2×7-0= 1 FIJKLM为虚约束。
1.3 解:
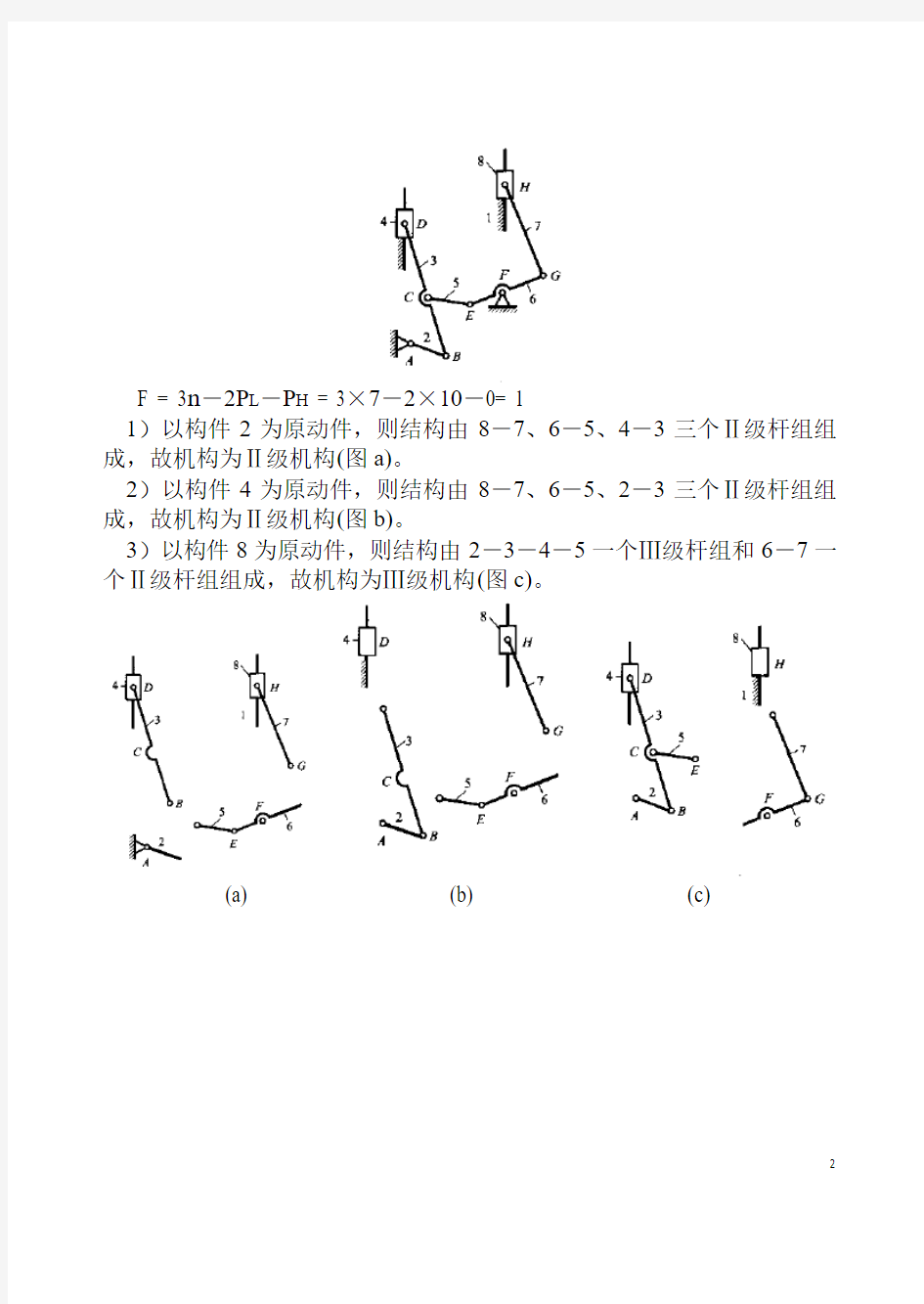
F = 3n-2P L-P H = 3×7-2×10-0= 1
1)以构件2为原动件,则结构由8-7、6-5、4-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图a)。
2)以构件4为原动件,则结构由8-7、6-5、2-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图b)。
3)以构件8为原动件,则结构由2-3-4-5一个Ⅲ级杆组和6-7一个Ⅱ级杆组组成,故机构为Ⅲ级机构(图c)。
(a) (b) (c)
第二章 运动分析作业
2.1 解:机构的瞬心如图所示。
2.2 解:取
作机构位置图如下图所示。
1.求D 点的速度V D
mm
mm l /5=
μ13
P D V V =
而 ,所以
2. 求ω1
3. 求ω2
因 ,所以 4. 求C 点的速度V C
2.3 解:取作机构位置图如下图a 所示。 1. 求B 2点的速度V B2
V B2 =ω1×L AB =10×30= 300 mm/s 2.求B 3点的速度V B3
V B3 = V B2 + V B3B2
大小 ? ω1×L AB ? 方向 ⊥BC ⊥AB ∥BC 取作速度多边形如下图b 所示,由图量得:
,所以
由图a 量得:BC=123 mm , 则
25241314==P P AE V V E D s mm V V E D /14425241502524=?==s rad l V AE E /25.1120150
1===
ω98382412141212==P P P P ωωs rad /46.0983825.1983812=?==ωωs
mm C P V l C /2.10154446.0242=??=??=μωmm
mm l /1=μmm s mm v /10=μmm
pb 223=s
mm pb V v B /270102733=?=?=μmm
BC l l BC 1231123=?=?=μ
3. 求D 点和E 点的速度V D 、V E
利用速度影像在速度多边形,过p 点作⊥CE ,过b 3点作⊥BE ,得到e 点;过e 点作⊥pb 3,得到d 点 , 由图量得:,
,
所以
, ;
4. 求ω3
5. 求
mm
pd 15=mm
pe 17=s
mm pd V v D /1501015=?=?=μs
mm pe V v E /1701017=?=?=μs
mm b b V v B B /17010173223=?=?=μs
rad l V BC B /2.2123270
33===ωn
B a 22
2212/30003010s mm l a AB
n B =?=?=ω
6. 求
a B3 = a B3n + a B3t = a B2 + a B3B2k + a B3B2τ 大小 ω32L BC ? ω12L AB 2ω3V B3B2 ?
方向 B →C ⊥BC B →A ⊥BC ∥BC
取作速度多边形如上图c 所示,由图量得:
,
,所以
7. 求
8. 求D 点和E 点的加速度a D 、a E
利用加速度影像在加速度多边形,作∽, 即
,得到e 点;过e 点作⊥,得到d 点 , 由图量得:
,
,
所以
,
。
2.7 解:取作机构位置图如下图a 所示。 一、用相对运动图解法进行分析 1. 求B 2点的速度V B2
V B2 =ω1×L AB =20×0.1 = 2 m/s 2.求B 3点的速度V B3
3B a 22233/5951232.2s mm l a BC n B =?=?=ω2
23323/11882702.222s mm V a B B k B B =??=?=ωmm
s mm a 2
/50=μmm
b 23'3=πmm
b n 20'33=233/11505023's mm b a a B =?=?=μπ2333/10005020's mm b n a a
t B =?=?=μ3α233/13.81231000s rad l a BC t
B ===αe b 3'π?CBE ?BE e
b CE e CB b 33''=
=ππ3'b πmm
e 16=πmm
d 13=π2/6505013s mm d a a D =?=?=μπ2
/8005016s mm e a a E =?=?=μπmm
mm l /2=μ
V B3 = V B2 + V B3B2
大小 ? ω1×L AB ?
方向 水平 ⊥AB ∥BD
取作速度多边形如下图b 所示,由图量得: ,所以
而V D = V B3= 1 m/s
3.求
4. 求
a B3 = a B2n + a B3B2τ
大小 ? ω12L AB ?
方向 水平 B →A ∥
BD
mm s m v /05.0=μmm pb 203=s
m pb V v B /105.02033=?=?=μn B a 222212/401.020s
m l a AB n B =?=?=ω3B a
取
作速度多边形如上图c 所示,由图量得:
,所以 。
二、用解析法进行分析
第三章 动力分析作业
3.1 解:
根据相对运动方向分别画出滑块1、2所受全反力的方向如图a 所示,图b 中三角形①、②分别为滑块2、1的力多边形,根据滑块2的力多边形①得:
,
由滑块1的力多边形②得: ,
而
mm s m a 2/1
=μmm
b 35'3=π2
33/35135's m b a a B =?=?=μπs
m l V V AB B D /130sin 1.020sin sin 11123=???=??=?=φωφ2
212123/6.3430cos 1.020cos cos 1
s m l a a AB B D =???=??=?=φω
φ???cos )90sin()260sin(1212R R r F F F =+?=-?)
260sin(cos 12??-?=r R F F ???cos )90sin()260sin(2121R R d
F F F =-?=+?)260sin()
260sin()260sin(cos )260sin(cos cos )260sin(21????????-?+?=-?+?=+?=r r R d F F F F ?===--53.8)15.0(11tg f tg ?
所以 3.2 解:取作机构运动简图,机构受力如图a)所示;
N F F r
d 7.1430)
53.8260sin()
53.8260sin(1000)260sin()260sin(=??-???+?=-?+?=??mm mm l /5=
μ
取作机构力多边形,得:
,, ,
,
,
3.2 解:机构受力如图a)所示
由图b)中力多边形可得:
所以
3.3 解:机构受力如图所示
mm N F /50=μN F R 3000506065=?=N F R 3350506745=?=N
F F F F R R R R 335043345445====N
F R 1750503523=?=N F R 2500505063=?=N F F F F R R R R 175021123223====m N mm N l F M AB R b -=-=?==1751750001001750
21N tg F tg F R 10001000455465=??==?N F F F R R 2.141445sin 1000
sin 454345=?
===??
=
?=?4.18sin 45sin 6.116sin 23
6343R R R F F F N F F R R 4.11182.14146.116sin 45sin 6.116sin 45sin 4363=???
=??=N F F R R 5002.14146.116sin 4.18sin 6.116sin 4.18sin 4323=???
=??=N F F F R R R 500612321===m N mm N l F M AB R b -=-=?==505000010050021
由图可得:
对于构件3
而言则:,故可求得 对于构件2而言则:
对于构件1而言则:,故可求得
3.7 解:
1. 根据相对运动方向分别画出滑块1所受全反力的方向如图a 所示,图b 为滑块1的力多边形,正行程时F d 为驱动力,则根据滑块1的力多边形得:
,
则夹紧力为:
2. 反行程时取负值,为驱动力,而为阻力,故
02343=++R R d F F F 23R F 1232R R F F =02141=++R R b F F F b F [])cos()(90
sin )2sin(2121?α?α?α+=+-?=+R R d F F F )
2sin()
cos(21?α?α++=d R F F )
2sin(cos )cos(cos 21?α?
?α?++==d R F F Fr ?21'R F d F '
,
而理想驱动力为: 所以其反行程效率为:
当要求其自锁时则,, 故 ,所以自锁条件为:
3.10 解:
1.机组串联部分效率为:
2. 机组并联部分效率为:
3. 机组总效率为:
4. 电动机的功率
输出功率: 电动机的功率:
)2sin()
cos(''21?α?α--=d R F F α
ααtg F F F d
d
R 'sin cos ''021==)cos()2sin()2sin('''''21
210?αα?α?α?αα
η--=
-==tg F tg F F F d
d
R R 0)
cos()
2sin('≤--=
?αα?αηtg 0)2sin(≤-?α?α2≤821.095.098.09.0'212
2
3=??==ηηηη688.095.098.03
27
.038.02''32=??+?+?=?++=
ηηηηηB A B B A A P P P
P %5.56565.0688.0821.0'''==?==ηηηkw P P N B A r 532=+=+=kw N N r
d 85.8565
.05
==
=
η
第四章 平面连杆机构作业
4.1 解:
1. ① d 为最大,则 故
② d 为中间,则
故
所以d 的取值范围为:
2. ① d 为最大,则 故
② d 为中间,则 故
③ d 为最小,则 故
④ d 为三杆之和,则 所以d 的取值范围为:
和
c b
d a +≤+mm
a c
b d 520120360280=-+=-+≤d b
c a +≤+mm
b c a d 200280360120=-+=-+≥mm
d mm 520200≤≤c b d a ++ mm
a c
b d 520120360280=-+=-+ d b
c a ++ mm
b c a d 200280360120=-+=-+ a b d c ++ mm
c a b
d 40360120280=-+=-+ mm
c a b
d 760360120280=++=++≤mm
d mm 20040 mm
d mm 760520≤
3. ① d 为最小,则 故
4.3 解:机构运动简图如图所示,其为曲柄滑块机构。
4.5 解:
1. 作机构运动简图如图所示;由图量得:,, ,,所以 , 行程速比系数为:
2. 因为
所以当取杆1为机架时,机构演化为双曲柄机构,C 、D 两个转动副是摆转副。
3. 当取杆3为机架时,机构演化为双摇杆机构,A 、B 两个转动副是周转副。
a b d c +≤+mm
c a b
d 40360120280=-+=-+
≤?=16θ?=68ψ?=155max δ?=52min δ?=?-?=-?=25155180180max min δγ20
.11618016180180180=?-??
+?=-?+?=
θθK 102505210072284231=+=+=+=+l l l l
4.7 解:1. 取
作机构运动简图如图所示;由图量得: ,故行程速比系数为:
由图量得:行程:
2. 由图量得:,故
3. 若当,则K= 1 ,无急回特性。
4.11 解: 1.取
,设计四杆机构如图所示。
2.由图中量得:
, , 。
mm
mm l /6=μ?=5θ05
.151805180180180=?-??+?=-?+?=θθK mm
h l 24064040=?=?=μ?=68min γ[]?=?=4068min γγ 0=e mm
mm l /4=μmm
AB l l AB 280470=?=?=μmm
D C l l CD 1004251=?=?=μmm
AD l l AD 31445.78=?=?=μ
4.16 解: 1.取
,设计四杆机构如图所示。
2.由图中量得:
,
。
3.图中AB ’C ’为的位置,由图中量得,图中AB ”C ” 为
mm
mm l /1=μmm AB l l AB 5.2115.211=?=?=μmm
C B l l BC 4514511=?=?=μmax α?=63max α
的位置,由图中量得。
4.滑块为原动件时机构的死点位置为AB 1C 1和AB 2C 2两个。
4.18 解: 1.计算极位夹角:
2.取,设计四杆机构如图所示。
3.该题有两组解,分别为AB 1C 1D 和AB 2C 2D 由图中量得:
, ;
max γ?=90max
γ?=??+-=??+-=
3618015.11
5.118011K K θmm
mm l /2=μmm
AB l l AB 4822411=?=?=μmm
C B l l C B 1202601111=?=?=μ
, 。
第五章 凸轮机构作业
5.1 解:
图中(c)图的作法是正确的,(a) 的作法其错误在于从动件在反转过程的位置应该与凸轮的转向相反,图中C ’B ’为正确位置;(b) 的作法其错误在于从动件在反转过程的位置应该与起始从动件的位置方位一致,图中C ’B ’为正确位置;(d) 的作法其错误在于从动件的位移不应该在凸轮的径向线上量取,图中CB ’为正确位置。
mm
AB l l AB 2221122=?=?=μmm
C B l l C B 502252222=?=?=
μ
5.4 解:如图所示。
5.5 解: 凸轮的理论轮廓曲线、偏距圆、基圆如图所示;
最大行程h =bc =20mm 、推程角、回程角; 凸轮机构不会发生运动失真,因为凸轮理论轮廓曲线为一圆。
?=1880δ?=172'0δ
H a r b i n I n s t i t u t e o f T e c h n o l o g y 机械原理大作业二 课程名称: 机械原理 设计题目: 凸轮机构设计 一.设计题目 设计直动从动件盘形凸轮机构, 1.运动规律(等加速等减速运动) 推程 0450≤≤? 推程 009045≤≤? 2.运动规律(等加速等减速运动) 回程 00200160≤≤? 回程 00240200≤≤? 三.推杆位移、速度、加速度线图及凸轮s d ds -φ 线图 采用VB 编程,其源程序及图像如下: 1.位移: Private Sub Command1_Click() Timer1.Enabled = True '开启计时器 End Sub Private Sub Timer1_Timer() Static i As Single
Dim s As Single, q As Single 'i作为静态变量,控制流程;s代表位移;q代表角度 Picture1.CurrentX = 0 Picture1.CurrentY = 0 i = i + 0.1 If i <= 45 Then q = i s = 240 * (q / 90) ^ 2 Picture1.PSet Step(q, -s), vbRed ElseIf i >= 45 And i <= 90 Then q = i s = 120 - 240 * ((90 - q) ^ 2) / (90 ^ 2) Picture1.PSet Step(q, -s), vbGreen ElseIf i >= 90 And i <= 150 Then q = i s = 120 Picture1.PSet Step(q, -s), vbBlack ElseIf i >= 150 And i <= 190 Then q = i s = 120 - 240 * (q - 150) ^ 2 / 6400 Picture1.PSet Step(q, -s), vbBlue ElseIf i >= 190 And i <= 230 Then
一、轧胚机的主要结构 1、喂料机构:沿轴长均匀给料。喂料的多少是用挡料门上的连接螺栓和左、右旋螺母来确定的。当放料需增大时,先松开连接螺栓,再把左、右旋螺母距离缩短,反之,增大左右旋螺母距离。 2、磁选机构:去除物料中的金属硬物。 3、轧辊机构:当喂料电机停止时,轧辊靠电气连锁动作自动分开,当喂料斗内达到上料位时,料位计发出信号,开始合辊,并用延时继电器来控制挡料门和喂料电机开启。 4、液压紧辊机构:液压系统通过手动换向阀和液压电磁换向阀来实现松、合辊动作。 5、定位机构:轧辊合拢时的限位,在保证胚片厚度的前提下,有效地防止轧辊碰撞。 6、刮刀装置:去除粘在辊间的胚片,使胚片的质量得到保证。 二、轧胚机的工作原理 1、经过筛选、去石后的蓖麻籽,均匀地进入具有一定压力和间隙且相对旋转的两辊间,经过对辊的挤压使蓖麻籽外皮破碎。 2、如有异硬物混入料中,则异硬物将使两辊受到一个正常反作用力,有时将强行撑开轧辊,使紧辊油缸活塞外移,油缸工作腔容积减小,而压力增高,增高的压力通过蓄能器来平衡,以保持系统压力不变。当异硬物过后,蓄能器将释放储存的能量,使轧胚机重新正常工作。液压轧胚机的特点
1液压轧胚机的特点液压轧胚机与弹簧轧胚机相比较,具有很多优点:产量高、操作简单省力,产品质量稳定。液压轧胚机从根本上改变了弹簧轧胚机生产的落后面貌,可以全部取代目前国产的轧胚机,使我国制油工艺进入了新的发展阶段,推动了我国制油工业的发展。与弹簧轧胚机相比较,液压轧胚机具有以下的特点:1.1轧胚机的进给与退出、轧辊间的压力调整、异物掉入辊间时轧辊瞬间脱开以及轧辊的装卸等动作都是由操作液压泵站来实现的,可以大大地减轻工人的劳动强度,同时也提高了该机的调整精度和自动化程度。1.2整个操作过程均由液压控制,各部件的动作灵敏,轴间压力高,压力均衡、平稳,轧制出的物料破碎率高。 蒸炒锅 蒸炒锅有卧式蒸炒锅、立式蒸炒锅、环式蒸胚机等,我们所使用的是立式蒸炒锅。下面我们详细介绍立式蒸炒锅。 立式蒸炒锅是由几个单体蒸炒锅重叠装置而成的层式蒸炒设备。重叠方式是呈圆柱形重叠排列。由于这种争吵设备操作方便易于密闭,所以通常都采用比较普遍。 生胚从进料口进入到锅体1后,由于每层锅体的边层和低层均为蒸汽夹层,一次首先受到间接蒸汽的加热。同时,通过第一层锅体搅拌刮刀的搅拌,在下料口之前有直接蒸汽管,将直接蒸汽均匀地喷入生胚内。在搅拌刮刀的作用下,料胚经自动料门3落入下一层。经蒸炒后的料胚最后从底层锅体的处理澳门4排出锅外。 下面我们分述一下蒸炒锅的结构 1、锅体 锅体是立式蒸炒锅最主要的部件之一。根据生产能力的大小,它的内径有1000、1200、1500、1700和2100mm等几种规格,而其层数又有三、四、五、六层之分、每层锅体的结构基本相同,主要由边层、底层、落料孔、排气口和检修门等部分所组成。对于底层锅体则无落料孔,而装有可调节的出料门。我们的蒸炒锅夹层为外夹层,这种结构虽然不够美观,保温敷设也比较麻烦,但是这种结构锅体有效容积相对较大,而且不容易有物料的堆积,焦化结块等现象相对较少。 底夹层
1. 分别说明下列指令的源操作数和目的操作数各采用什么寻址方式。 (1)MOV AX,2408H (2)MOV CL,0FFH (3)MOV BX,[SI] (4)MOV 5[BX],BL (5)MOV [BP+100H],AX (6)MOV [BX+DI],’$’ (7)MOV DX,ES:[BX+SI] (8)MOV VAL[BP+DI],DX (9)IN AL,05H (10)MOV DS,AX (1)立即数寻址;寄存器寻址 (2)立即数寻址;寄存器寻址 (3)寄存器间寻址;寄存器寻址 (4)寄存器寻址;寄存器相对寻址 (5)寄存器寻址;寄存器相对寻址 (6)立即数寻址;基址变址寻址 (7)基址变址寻址;寄存器寻址 (8)寄存器寻址;相对基址变址寻址 (9)直接寻址;寄存器寻址 (10)寄存器寻址;寄存器寻址 2 已知:DS=1000H,BX=0200H,SI=02H,内存10200H~10205H 单元的内容分别为10H,2AH,3CH,46H,59H,6BH。下列每条指令执行完后AX 寄存器的内容各是什么? (1)MOV AX,0200H (2)MOV AX,[200H] (3)MOV AX,BX (4)MOV AX,3[BX] (5)MOV AX,[BX+SI] (6)MOV AX,2[BX+SI] (1)AX=0200H (2)AX=2A10H (3)AX=0200H (4)AX=5946H (5)AX=463CH (6)AX=6B59H
3. 设DS=1000H,ES=2000H,SS=3500H,SI=00A0H,DI=0024H,BX=0100H, BP=0200H, 数据段中变量名为VAL 的偏移地址值为0030H,试说明下列源操作数字段的寻址方式是什 么?物理地址值是多少? 1)MOV AX,[100H] (2)MOV AX,VAL (3)MOV AX,[BX] (4)MOV AX,ES:[BX] (5)MOV AX,[SI] (6)MOV AX,[BX+10H] (7)MOV AX,[BP] (8)MOV AX,VAL[BP][SI] (9)MOV AX,VAL[BX][DI] (10)MOV AX,[BP][DI] (1)直接,10100H (2)直接,10030H (3)寄存器间接,10100H (4)寄存器间接,20100H (5)寄存器间接,100A0H (6)寄存器相对,10110H (7)寄存器间接,35200H (8)相对基址变址,352D0H (9)相对基址变址,10154H (10)基址变址,35224H 4 若AL=0FFH,BL=13H,指出下列指令执行后标志AF、OF、ZF、SF、PF、CF的状态。 (1) ADD BL, AL (2) SUB BL, AL (3) INC BL (4) NEG BL (5) AND AL, BL (6) MUL BL (1)AF= 1 , OF= 1 , ZF= 0 , SF= 0 , PF= 1 , CF= 1 (2)AF= 0 , OF= 0 , ZF= 0 , SF= 0 ,PF= 1 , CF= 0 (3)AF= 0 , OF= 0 , ZF= 0 , SF= 0 ,PF= 1 , CF= 0 (4)AF= 0 , OF= 0 , ZF= 0 , SF= 1 ,PF= 1 , CF= 0 (5)AF= 0 , OF= 0 , ZF= 0 , SF= 0 ,PF= 0 , CF= 0 (6)AF= 0 , OF= 0 , ZF= 0 , SF= 0 ,PF= 0 , CF= 0
第一章绪论 基本概念:机器、机构、机械、零件、构件、机架、原动件和从动件。 第二章平面机构的结构分析 机构运动简图的绘制、运动链成为机构的条件和机构的组成原理是本章学习的重点。 1. 机构运动简图的绘制 机构运动简图的绘制是本章的重点,也是一个难点。 为保证机构运动简图与实际机械有完全相同的结构和运动特性,对绘制好的简图需进一步检查与核对(运动副的性质和数目来检查)。 2. 运动链成为机构的条件 判断所设计的运动链能否成为机构,是本章的重点。 运动链成为机构的条件是:原动件数目等于运动链的自由度数目。 机构自由度的计算错误会导致对机构运动的可能性和确定性的错误判断,从而影响机械设计工作的正常进行。 机构自由度计算是本章学习的重点。 准确识别复合铰链、局部自由度和虚约束,并做出正确处理。 (1) 复合铰链 复合铰链是指两个以上的构件在同一处以转动副相联接时组成的运动副。 正确处理方法:k个在同一处形成复合铰链的构件,其转动副的数目应为(k-1)个。 (2) 局部自由度 局部自由度是机构中某些构件所具有的并不影响其他构件的运动的自由度。局部自由度常发生在为减小高副磨损而增加的滚子处。 正确处理方法:从机构自由度计算公式中将局部自由度减去,也可以将滚子及与滚子相连的构件固结为一体,预先将滚子除去不计,然后再利用公式计算自由度。 (3) 虚约束 虚约束是机构中所存在的不产生实际约束效果的重复约束。 正确处理方法:计算自由度时,首先将引入虚约束的构件及其运动副除去不计,然后用自由度公式进行计算。 虚约束都是在一定的几何条件下出现的,这些几何条件有些是暗含的,有些则是明确给定的。对于暗含的几何条件,需通过直观判断来识别虚约束;对于明确给定的几何条件,则需通过严格的几何证明才能识别。 3. 机构的组成原理与结构分析 机构的组成过程和机构的结构分析过程正好相反,前者是研究如何将若干个自由度为零的基本杆组依次联接到原动件和机架上,以组成新的机构,它为设计者进行机构创新设计提供了一条途径;后者是研究如何将现有机构依次拆成基本杆组、原动件及机架,以便对机构进行结构分类。 第三章平面机构的运动分析 1.基本概念:速度瞬心、绝对速度瞬心和相对速度瞬心(数目、位置的确定),以及“三心定理”。 2.瞬心法在简单机构运动分析上的应用。 3.同一构件上两点的速度之间及加速度之间矢量方程式、组成移动副两平面运动构件在瞬时重合点上速度之间和加速度的矢量方程式,在什么条件下,可用相对运动图解法求解? 4.“速度影像”和“加速度影像”的应用条件。 5.构件的角速度和角加速度的大小和方向的确定以及构件上某点法向加速度的大小和方向的确定。 6.哥氏加速度出现的条件、大小的计算和方向的确定。 第四章平面机构的力分析 1.基本概念:“静力分析”、“动力分析”及“动态静力分析” 、“平衡力”或“平衡力矩”、“摩擦角”、“摩擦锥”、“当量摩擦系数”和“当量摩擦角”(引入的意义)、“摩擦圆”。 2.各种构件的惯性力的确定: ①作平面移动的构件; ②绕通过质心轴转动的构件;
开发区生产车间部分设备工作原理汇编 1、卧式脱溶干燥机 该机由电动机驱动硬齿面齿轮减速机,通过链轮、链条带动螺旋转子转动,物料由A筒进料口进入,螺旋叶片及拨料板翻动物料,并使物料逐步前移,送到另一端厚,通过闭风器落入B筒,物料在B筒内重复上述过程,最后从脱溶机下端底部通过闭风器输出,进入下道工序。物料的加热靠夹套内得饱和水蒸气 供热,通过调节进气阀、物料运行速度,可调节烘干温度和烘干时间。 2、分离机 被分离的物料输入转鼓内部,在离心力的作用下,物料经过一组碟片束的分离间隔中,以碟片中性孔为分界面,比重较大的重相沿碟片壁向中性孔外运动,其中重渣积聚在沉渣区,皂脚则流向大向心泵处。比重较小的轻相沿碟片壁内向上运动,汇聚至小向心泵处。轻重相分别由小向心泵和大向心泵输出。沉渣按照 排渣时间及排渣间隔自动排出机外。 3、齿轮泵 齿轮油泵在泵体中装有一对外啮合齿轮,如图所示,其中一个主动,一个被动,从而依靠两齿轮的啮合,将泵体内的整个工作腔分为两个独立的部分:吸入腔A和排出腔B。泵运转时主动齿轮带动被动齿轮旋转,当一对啮合的齿轮在吸入腔侧分开时,其齿谷就形成局部真空,液体被吸入齿间,当被吸入的液体通过齿轮的旋转进入排出腔后,由于轮齿的再度啮合,齿间的液体被挤出,从而形 成高压液体,并经过泵的排出口排出泵外。 4、刮板机 刮板输送机主要由机头、机尾和各种型式的中间工作段及输送链条组成。链条绕机头、机尾、各工作段一周,由机头的主动链轮驱动在槽内作低速运动,物料由加料段浸入,随链条刮动前进,由卸料口卸下。机头、机尾的头轮和尾轮由滚动轴承支撑。为了保证链条在运动过程中处于张紧状态,机尾设有张紧装置, 尾轮轴承座可在特制导轨滑动,由螺杆调节其张紧程度。 5、关风器 物料从进料口进入,在转子转动过程中,物料随转子到出料口,形成连续喂 料过程,同时起到密封的作用。 6、空压机 当转子转动时,主副转子的齿沟空间在转至进气端壁开口时,其空间最大,此时转子的齿沟空间与进气口的自由空气相通,因在排气时齿沟的空气被全数排出,排气完成时齿沟处于真空状态,当转到进气口时,外界空气即被吸入,沿轴
机械原理第二版(朱理)作业答案 机械原理作业 第一章结构分析作业 1.2 解: F = 3n-2P L-P H = 3×3-2×4-1= 0 该机构不能运动,修改方案如下图: 1.2 解: (a)F = 3n-2P L-P H = 3×4-2×5-1= 1 A点为复合铰链。(b)F = 3n-2P L-P H = 3×5-2×6-2= 1 B、E两点为局部自由度, F、C两点各有一处为虚约束。 (c)F = 3n-2P L-P H = 3×5-2×7-0= 1 FIJKLM为虚约束。 1.3 解:
F = 3n-2P L-P H = 3×7-2×10-0= 1 1)以构件2为原动件,则结构由8-7、6-5、4-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图a)。 2)以构件4为原动件,则结构由8-7、6-5、2-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图b)。 3)以构件8为原动件,则结构由2-3-4-5一个Ⅲ级杆组和6-7一个Ⅱ级杆组组成,故机构为Ⅲ级机构(图c)。 (a) (b) (c)
第二章 运动分析作业 2.1 解:机构的瞬心如图所示。 2.2 解:取 作机构位置图如下图所示。 1.求D 点的速度V D mm mm l /5= μ13 P D V V =
而 ,所以 2. 求ω1 3. 求ω2 因 ,所以 4. 求C 点的速度V C 2.3 解:取作机构位置图如下图a 所示。 1. 求B 2点的速度V B2 V B2 =ω1×L AB =10×30= 300 mm/s 2.求B 3点的速度V B3 V B3 = V B2 + V B3B2 大小 ? ω1×L AB ? 方向 ⊥BC ⊥AB ∥BC 取作速度多边形如下图b 所示,由图量得: ,所以 由图a 量得:BC=123 mm , 则 25241314==P P AE V V E D s mm V V E D /14425241502524=?==s rad l V AE E /25.1120150 1=== ω98382412141212==P P P P ωωs rad /46.0983825.1983812=?==ωωs mm C P V l C /2.10154446.0242=??=??=μωmm mm l /1=μmm s mm v /10=μmm pb 223=s mm pb V v B /270102733=?=?=μmm BC l l BC 1231123=?=?=μ
《微机原理与接口技术》第二次作业答案 (C ) A. 10100000B B. 01000001B C. 01000000B D. 10100001B 6.二进制数 10110101B-11011011B (即2014年09月11日)后显示在题目旁边。 一、单项选择题。本大题共 20个小题,每小题 3.0分,: 选项中,只有 ?项是符合题目要求的。 1. “ A 的 ASCII 码值是() (B ) A. 51H B. 41H C. 61H D. 31H 2. 二进制数10101101 转换为十进制数的值是( ) (C ) A. 174 B. 175 C. 173 D. 172 3. 十六进制数ECH 转换为十进制数的值是() (A ) A. 236 B. 235 C. 234 D. 237 4. 设A=186,B=273Q,C=0BBH ,它们之间的关系是 (D ) A. A>B>C B. A A. 11001011B B. 01011010B C. 11011010B D. 01011011B 7.二进制数 10010111B 与11010011B 求和后, ZF 与CF 标志位的值为() A. 1、1 B. 0、1 C. 1、0 D. 0、0 8. 二进制数 10010111B (B ) 与11010011B 求和后, PF 与OF 标志位的值为() (A ) A. 1、 1 B. 0、 1 C. 1、 0 D. 0、 0 9. 标志寄存器中属于控制标志位的是( (D ) A. DF ,OF ,SF B. OF ,CF ,PF C. AF ,OF ,SF D. DF ,IF ,TF 0、0 10. 8088/8086 存储器分段,每个段不超过( ) (D ) A. 64K 个字 B. 32K 个字节 C. 1兆个字节 D. 64K 个字节 (A ) A. END 语句是一可执行语句 B. END 语句表示程序执仃到此结束 C. END 语句表示源程序到此结束 D. END 语句在汇编后要产生机器码 11.在汇编语言程序中,对 END 语句正确的叙述是() 机械原理大作业 二、题目(平面机构的力分析) 在图示的正弦机构中,已知l AB =100 mm,h1=120 mm,h2 =80 mm,W1 =10 rad/s(常数),滑块2和构件3的重量分别为G2 =40 N和G3 =100 N,质心S2 和S3 的位置如图所示,加于构件3上的生产阻力Fr=400 N,构件1的重力和惯性力略去不计。试用解析法求机构在Φ1=60°、150°、220°位置时各运动副反力和需加于构件1上的平衡力偶M 。 b Array 二、受力分析图 三、算法 (1)运动分析 AB l l =1 滑块2 22112112/,/s m w l a s m w l v c c == 滑块3 21113113/cos ,sin s m l w v m l s ??== 212 113/sin s m w l a ?-= (2)确定惯性力 N w l g G a m F c 2 1122212)/(== N w l g G a m F 121133313sin )/(?-== (3)受力分析 i F F i F F x R D R x R C R 43434343,=-= j F j F F R R R 232323-== j F i F j F i F F R x R y R x R R 2121121212--=+= j F F F y R x R R 414141+= 取移动副为首解副 ① 取构件3为分离体,并对C 点取矩 由0=∑y F 得 1323F F F r R -= 由0=∑x F 得 C R D R F F 4343= 由 ∑=0C M 得 2112343/cos h l F F R D R ?= ②取构件2为分离体 由0=∑x F 得 11212cos ?R x R F F = 由0 =∑y F 得 1123212sin ?F F F R y R -= ③取构件1为分离体,并对A 点取矩 由0=∑x F 得 x R x R F F 1241= 由0 =∑ y F 得 y R y R F F 1241= 由0=A M 得 1132cos ?l F M R b = 四、根据算法编写Matlab 程序如下: %--------------已知条件---------------------------------- G2=40; G3=100; g=9.8; fai=0; l1=0.1; w1=10; Fr=400; h2=0.8; %--------分布计算,也可将所有变量放在一个矩阵中求解------------------- for i=1:37 a2=l1*(w1^2); a3=-l1*(w1^2)*sin(fai); F12=(G2/g)*a2; 第1章 绪 论 教学提示:初步介绍机械设计基础课程研究的内容和机械零件设计的基本要求。 教学要求:掌握构件、零件、机构、机器、机械等名词的含义及机械零件的工作能力计算准则。 1.1 机器的组成 在人们的生产和生活中,广泛使用着各种机器。机器可以减轻或代替人的体力劳动,并大大提高劳动生产率和产品质量。随着科学技术的发展,生产的机械化和自动化已经成为衡量一个国家社会生产力发展水平的重要标志之一。 1.1.1 几个常用术语 1. 机器、机构、机械 尽管机器的用途和性能千差万别,但它们的组成却有共同之处,总的来说机器有三个共同的特征:①都是一种人为的实物组合;②各部分形成运动单元,各运动单元之间具有确定的相对运动;③能实现能量转换或完成有用的机械功。同时具备这三个特征的称为机器,仅具备前两个特征的称为机构。若抛开其在做功和转换能量方面所起的作用,仅从结构和运动观点来看两者并无差别,因此,工程上把机器和机构统称为“机械”。 以单缸内燃机(如图1.1所示)为例,它是由气缸体l、活塞2、进气阀3、排气阀4、连杆5、曲轴6、凸轮7、顶杆8、齿轮9和齿轮10等组成。通过燃气在气缸内的进气—压缩—爆燃—排气过程,使其燃烧的热能转变为曲轴转动的机械能。 单缸内燃机作为一台机器,是由连杆机构、凸轮机构和齿轮机构组成的。由气缸体、活塞、连杆、曲轴组成的连杆机构,把燃气推动的活塞往复运动,经连杆转变为曲轴的连续转动;气缸体、齿轮9和10组成的齿轮机构将曲轴的转动传递给凸轮轴;而由凸轮、顶杆、气缸体组成的凸轮机构又将凸轮轴的转动变换为顶杆的直线往复运动,进而保证进、排气阀有规律的启闭。可见,机器由机构组成,简单的机器也可只有一个机构。 2. 构件、零件、部件 组成机器的运动单元称为构件;组成机器的制造单元称为零件。构件可以是单一的零件,也可以由刚性组合在一起的几个零件组成。如图1.1所示中的齿轮既是零件又是构件;而连杆则是由连杆体、连杆盖、螺栓及螺母几个零件组成,这些零件形成一个整体而进行运动,所以称为一个构件,如图1.2所示。 在机械中还把为完成同一使命、彼此协同工作的一系列零件或构件所组成的组合体称为部件,如滚动轴承、联轴器、减速器等。 机械原理部分课后答案 第一章结构分析作业 1.2 解: F = 3n-2P L-P H = 3×3-2×4-1= 0 该机构不能运动,修改方案如下图: 1.2 解: (a)F = 3n-2P L-P H = 3×4-2×5-1= 1 A点为复合铰链。(b)F = 3n-2P L-P H = 3×5-2×6-2= 1 B、E两点为局部自由度, F、C两点各有一处为虚约束。 (c)F = 3n-2P L-P H = 3×5-2×7-0= 1 FIJKLM为虚约束。 1.3 解: F = 3n-2P L-P H = 3×7-2×10-0= 1 1)以构件2为原动件,则结构由8-7、6-5、4-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图a)。 2)以构件4为原动件,则结构由8-7、6-5、2-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图b)。 3)以构件8为原动件,则结构由2-3-4-5一个Ⅲ级杆组和6-7一个Ⅱ级杆组组成,故机构为Ⅲ级机构(图c)。 (a) (b) (c) 第二章 运动分析作业 2.1 解:机构的瞬心如图所示。 2.2 解:取 mm mm l /5=μ作机构位置图如下图所示。 1.求D 点的速度V D 13 P D V V = 而 25241314==P P AE V V E D ,所以 s mm V V E D /14425241502524=?== 2. 求ω1 s r a d l V AE E /25.1120150 1=== ω 3. 求ω2 因 98382412141212==P P P P ωω ,所以s rad /46.0983825.1983812=?==ωω 4. 求C 点的速度V C s mm C P V l C /2.10154446.0242=??=??=μω 2.3 解:取mm mm l /1=μ作机构位置图如下图a 所示。 1. 求B 2点的速度V B2 V B2 =ω1×L AB =10×30= 300 mm/s 2.求B 3点的速度V B3 V B3 = V B2 + V B3B2 大小 ? ω1×L AB ? 方向 ⊥BC ⊥AB ∥BC 取mm s mm v /10=μ作速度多边形如下图b 所示,由图量得: mm pb 223= ,所以 s mm pb V v B /270102733=?=?=μ 由图a 量得:BC=123 mm , 则 mm BC l l BC 1231123=?=?=μ Harbin Institute of Technology 机械原理大作业(一) 课程名称:机械原理 设计题目:连杆机构运动分析 院系:机电工程学院 班级: 设计者: 学号: 指导教师: 一、题目(13) 如图所示机构,已知各构件尺寸:Lab=150mm;Lbc=220mm;Lcd=250mm;Lad=300mm;Lef=60mm;Lbe=110mm;EF⊥BC。试研究各杆件长度变化对F点轨迹的影响。 二、机构运动分析数学模型 1.杆组拆分与坐标系选取 本机构通过杆组法拆分为: I级机构、II级杆组RRR两部分如下: 2.平面构件运动分析的数学模型 图3 平面运动构件(单杆)的运动分析 2.1数学模型 已知构件K 上的1N 点的位置1x P ,1y P ,速度为1x v ,1Y v ,加速度为1 x a ,1y a 及过点的1N 点的线段12N N 的位置角θ,构件的角速度ω,角加速度ε,求构件上点2N 和任意指定点3N (位置参数13N N =2R ,213N N N ∠=γ)的位置、 速度、加速度。 1N ,3N 点的位置为: 211cos x x P P R θ=+ 211sin y y P P R θ=+ 312cos()x x P P R θγ=++ 312sin()y y P P R θγ=++ 1N ,3N 点的速度,加速度为: 211211sin ()x x x y y v v R v P P ωθω=-=-- 211121sin (-) y y y x x v v R v P P ωθω=-=- 312131sin() () x x x y y v v R v P P ωθγω=-+=--312131cos()() y y y x x v v R v P P ωθγω=-+=-- 2 212121()()x x y y x x a a P P P P εω=---- 2 212121()() y y x x y y a a P P P P εω=+--- 2313131()()x x y y x x a a P P P P εω=---- 23133(1)(1) y y x x y y a a P P P P εω=+--- 2.2 运动分析子程序 根据上述表达式,编写用于计算构件上任意一点位置坐标、速度、加速度的子程序如下: 1>位置计算 function [s_Nx,s_Ny ] =s_crank(Ax,Ay,theta,phi,s) s_Nx=Ax+s*cos(theta+phi); s_Ny=Ay+s*sin(theta+phi); end 2>速度计算 function [ v_Nx,v_Ny ] =v_crank(s,v_Ax,v_Ay,omiga,theta,phi) v_Nx=v_Ax-s*omiga.*sin(theta+phi); v_Ny=v_Ay+s*omiga.*cos(theta+phi); end 3>加速度计算 function [ a_Nx,a_Ny ]=a_crank(s,a_Ax,a_Ay,alph,omiga,theta,phi) a_Nx=a_Ax-alph.*s.*sin(theta+phi)-omiga.^2.*s.*cos(theta+phi); 2013年9月份考试机械原理第二次作业 一、单项选择题(本大题共40分,共 20 小题,每小题 2 分) 1. 一个平面运动链的原动件数目小于此运动链的自由度数下时,则此运动链( )。 A. 具有确定的相对运动 B. 只能作有限的相对运动 C. 运动不能确定 D. 不能运动 2. 若从动件的运动规律选择为等加速等减速运动规律、简谐运动规律或正弦加速度运动规律,当把凸轮转速提高一倍时,从动件的加速度是原来的( ) 倍。 A. 1; B. 2; C. 4; D. 8 3. 增加凸轮机构的偏距圆半径,其压力角( )。 A. 增大 B. 减小 C. 可能增大,也可能减小 4. 在设计几何锁合式凸轮机构时,( )。 A. 只要控制推程最大压力角 B. 要同时控制推程和回程最大压力角 C. 只要控制回程最大压力角 5. 在进行周转轮系的运动分析时,将运动分析的参考系选择为( ),使周转轮 系转化成“定轴轮系”,齿轮相对转速之间的关系就可以用定轴轮系传动比的 计算公式,再利用相对转速与绝对转速之间的关系,便可以完成轮系的运动分析。 A. 中心轮 B. 行星轮 C. 系杆 D. 以上都不对 6. 已知一滚子接触摆动从动件盘形凸轮机构,因滚子损坏,更换了一个外径与原滚子不同的新滚子,则更换滚子后( )。 A. 从动件运动规律发生变化,而从动件最大摆角不变 B. 从动件最大摆角发生变化,而从动件运动规律不变 C. 从动件最大摆角和从动件运动规律均不变 D. 从动件最大摆角和从动件运动规律均发生变化 7. 图示一变直径带轮。设该带轮材料均匀,制造安装正确,当它绕AA轴线回 转时处于()状态。 A. 静不平衡 B. 静平衡 C. 不平衡 D. 动平衡 8. 选择轮系中各轮齿数时满足的装配条件关系式,主要内容为()。 A. 两个 起重机的组成及工作原理 起重机由驱动装置、工作机构、取物装置、操纵控制系统和金属结构组成。通过对控制系统的操纵,驱动装置将动力的能量输入,转变为机械能,在传递给取物装置。取物装置将被搬运物体与起重机联系起来,通过工作机构单独或组合运动,完成物体搬运任务。可移动金属结构将各组成部分连接成一个整体,并承载起重机的自重和吊重。 起重机的组成及工作原理 图2-3起重机的工作原理 一、驱动装置 驱动装置是用来驱动工作机构的动力设备。常见的驱动设备有电力驱动、内燃机驱动和人力驱动等,电能是清洁、经济的能源,电力驱动是现代起重机的主要驱动方式。 二、工作机构 工作机构包括:起升机构、运行机构。 a)起升机构是用来实现物体的垂直升降的机构是任何起重机部可缺少的部分,因此它是起重机最主要、最基本的机构。 b)运行机构是通过起重机或起升小车来实现水平搬运物体的机构,可分为有轨运行和无轨运行。 三、取物装置 取物装置是通过吊钩将物体与起重机联系起来进行物体吊运的装置。根据被吊物体不同的种类、形态、体积大小,采用不同种类的取物装置。合适的取物装置可以减轻工作人员的劳动强度,大大提高工作效率。防止吊物坠落,保证工作人员的安全和吊物不受损伤时对取物装置安全的基本要求。 四、金属结构 金属结构是以金属材料轧制的型钢和钢板做为基本构件,通过焊接、铆接、螺栓连接等方法,按一定的组成规则连接,承受起重机的自重和载荷的钢结构。 金属结构的重量大约是整台起重机的40%-70%左右,重型起重机可达到90%;金属结构按照它的构造可分为实腹式和格构式两类,组成起重机的基本受力构件。起重机金属结构的工作特点有受力复杂、自重大、耗材多和整体可移动性。起重机的金属结构是起重机的重要组成部分,它是整台起重机的骨架,将起重机的机械和电气设备连接组合成一个有机的整体,承受和传递作用在起重机上的各种载荷并形成一定的作业空间,以便使起吊的重物搬运到指定的地点。 五、控制操纵系统 通过电气系统控制操纵起重机各机构及整机的运动,进行各种起重作业。 控制操纵系统包括各种操纵器、显示器及相关元件和线路,是人机对话的接口。该系统的状态直接影响到起重机的作业、效率和安全等。 起重机与一般的机器的显着区别是庞大、可移动的金属结构和多机构组合工作。间歇式的循环作业、起重载荷的不均匀性、各机构运动循环的不一定性、机构负载的不等时性、多人参与的配合作业的特点,又增加了起重机的复杂性、安全隐患多、危险范围大。 纽科伦(新乡)起重机有限公司 机械原理作业 第一章结构分析作业 解: F = 3n-2P L-P H = 3×3-2×4-1= 0 该机构不能运动,修改方案如下图: 解: (a)F = 3n-2P L-P H = 3×4-2×5-1= 1 A点为复合铰链。(b)F = 3n-2P L-P H = 3×5-2×6-2= 1 B、E两点为局部自由度, F、C两点各有一处为虚约束。 (c)F = 3n-2P L-P H = 3×5-2×7-0= 1 FIJKLM为虚约束。解: F = 3n-2P L-P H = 3×7-2×10-0= 1 1)以构件2为原动件,则结构由8-7、6-5、4-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图a)。 2)以构件4为原动件,则结构由8-7、6-5、2-3三个Ⅱ级杆组组成,故机构为Ⅱ级机构(图b)。 3)以构件8为原动件,则结构由2-3-4-5一个Ⅲ级杆组和6-7一个Ⅱ级杆组组成,故机构为Ⅲ级机构(图c)。 (a) (b) (c) 第二章运动分析作业 解:机构的瞬心如图所示。 解:取作机构位置图如下图所示。 1.求D点的速度V D 而,所以 2. 求ω1 3. 求ω2 因,所以 4. 求C点的速度V C 解:取作机构位置图如下图a所示。 1. 求B2点的速度V B2 V B2 =ω1×L AB =10×30= 300 mm/s 2.求B3点的速度V B3 V B3 =V B2 +V B3B2 大小?ω1×L AB ? 方向⊥BC ⊥AB ∥BC 取作速度多边形如下图b所示,由图量得: ,所以 由图a量得:BC=123 mm , 则 3. 求D点和E点的速度V D、V E 利用速度影像在速度多边形,过p点作⊥CE,过b3点作⊥BE,得到e 点;过e点作⊥pb3,得到d点 , 由图量得:,, 所以, ; 4. 求ω3 5. 求 6. 求 第二章机构的结构分析 一、填空与选择题 1、B、A 2、由两构件直接接触而产生的具有某种相对 运动 3、低副,高副,2,1 4、后者有作为机架的固定构件 5、自由度的数目等于原动件的数目;运动不确定或机构被破坏 6、√ 7、 8、1 9、受力情况 10、原动件、机架、若干个基本杆组 11、A、B 12、C 13、C 二、绘制机构简图 1、计算自由度 7, 9,2 323×7-2×9-2=1 2、3、 4、 三、自由度计算 (a)E处为局部自由度;F处(或G处)为虚约束 计算自由度 4,5,1 323×4-2×5-1=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (b) E处(或F处)为虚约束 计算自由度 5,7,0 323×5-2×7=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (c) B处为局部自由度;F处为复合铰链;J处(或K处)为虚约 束 计算自由度 9,12,2 323×9-2×12-2=1 自由度的数目等于原动件的数目所以该机构具有确定的运 动。 (d) B处为局部自由度;C处为复合铰链;G处(或I处)为虚约束 计算自由度 7,9,1 323×7-2×9-1=2 自由度的数目大于原动件的数目所以该机构不具有确定的运动。 (e) 构件(或)及其两端的转动副引入一个虚约束 计算自由度 3,4,0 323×3-2×4=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (f) C处为复合铰链; 计算自由度 7,10,0 323×7-2×10=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (g) B处为局部自由度;F处为复合铰链;E处(或D处)为虚约束 计算自由度 6,8,1 323×6-2×8-1=1 (h)去掉杆8此处存在虚约束;B和C处为复合铰链 计算自由度 7,10,0 323×7-2×10=1 机械原理大作业三 课程名称: 机械原理 级: 者: 号: 指导教师: 设计时间: 1.2机械传动系统原始参数 设计题目: 系: 齿轮传动设计 1、设计题 目 1.1机构运动简图 - 11 7/7777777^77 3 UtH TH7T 8 'T "r 9 7TTTT 10 12 - 77777" 13 ///// u 2 电动机转速n 745r/min ,输出转速n01 12r/mi n , n02 17r /mi n , n°323r/min,带传动的最大传动比i pmax 2.5 ,滑移齿轮传动的最大传动比 i vmax 4,定轴齿轮传动的最大传动比i d max 4。 根据传动系统的原始参数可知,传动系统的总传动比为: 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实 现。设带传动的传动比为i pmax 2.5,滑移齿轮的传动比为9、心、「3,定轴齿轮传动的传动比为i f,则总传动比 i vi i vmax 则可得定轴齿轮传动部分的传动比为 滑移齿轮传动的传动比为 设定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、 7、8 9和10为角度变位齿轮,其齿数: Z5 11,Z6 43,Z7 14,Z8 39,Z9 18,乙。35 ;它们的齿顶高系数0 1,径向间隙 系数c 0.25,分度圆压力角200,实际中心距a' 51mm。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为角度变位齿轮,其齿数:Z11 z13 13,乙 2 z14 24。它们的齿顶高系数d 1,径向间隙系数c 0.25,分度圆压力角200,实际中心距 a' 46mm。圆锥齿轮15和16选择为标准齿轮令13,乙 6 24,齿顶高系数 h a 1,径向间隙系数c 0.20,分度圆压力角为200(等于啮合角’)。 4、滑移齿轮变速传动中每对齿轮几何尺寸及重合度的计算 4.1滑移齿轮5和齿轮6 工业大学 课程设计 资料袋 机械工程学院学院(系、部) 2011 ~ 2012 学年第 2 学期课程名称机械原理课程设计指导教师职称 学生专业班级学号 题目洗瓶机 成绩起止日期 2012 年 5月 28 日~ 2012 年 6月 2 日 目录清单 机械原理 设计说明书 洗瓶机 起止日期: 2012 年 5月 28 日至 2012 年 6 月 2 日学生 班级 学号 成绩 指导教师 机械工程学院(部) 2012年 5 月29 日 目录 设计任务书 (2) 1.工作原理和工艺动作分解 (3) 2根据工艺动作和协调要求拟定运动循环图 (3) 3.执行机构选型…………………………………… 4.机械运动方案的选择和评定…………………………… 5.机械传动系统的速比变速机构……………………… 6.机构运动简图…………………………………………… 7. 洗瓶机构的尺度设计……………………………… 8,洗瓶机构速度与加速度分析(分析一个位置)…….. 9.参考资料…………………………………………………. 10.设计总结………………………………………………… 工业大学 课程设计任务书 2011 —2012 学年第 2 学期 机械工程学院(系、部)专业班级 课程名称:机械原理课程设计 设计题目:洗瓶机 完成期限:自 2012 年 5 月 28 日至 2012 年 6 月 2 日共 1 周 容及任务一、设计的任务与主要技术参数 将瓶子推入同时转动的导辊上,导辊带动瓶子旋转,推动瓶子沿导辊前进,转动的刷子就可以将瓶子刷干净。 其工艺过程是: (1) 将到位的瓶子沿着导辊推动; (2) 瓶子推动过程利用导辊转动将瓶子 转动; (3) 作为清洗工具的刷子的转动; 其余设计参数是: (1)瓶子尺寸大端直径d=80mm , 长l=200mm ; (2)推进距离L=600mm ;推瓶机构应使推头以接近均匀的速度推瓶,平稳地接触和脱离瓶子,然后推头快速返回原位,准备进入第二个工作循环。 (3)按生产率的要求,退成平均速度v=45mm/s,返回时的平均速度为工作形成平均速度的3倍。 (4)、电动机转速为1440 r/min。 (5)、急回系数3。 二、设计工作量 要求:对设计任务课题进行工作原理和工艺动作分解,根据工艺动作和协调要求拟定运动循环图,进行执行机构选型,构思该机械运动方案,并进行的选择和评定,确定机械运动的总体方案,根据任务书中的技术参数,确定该机械传动系统的速比,作出机构运动简图,对相关执行机构的具体尺度进行分析与设计。 要求有设计说明书一份,相关图纸一至两。 进度安排 起止日期工作容 5.28-5.29 构思该机械运动方案 5.30.-5.31 运动分析及作图 6.2 整理说明书机械原理大作业
机械设计原理
机械原理课后习题答案(朱理)
机械原理大作业
2013年9月份考试机械原理第二次作业
起重机的机械组成及工作原理
机械原理第二版课后答案朱理
太原科技大学-机械原理作业册答案
机械原理大作业
机械原理课程设计_洗瓶机
相关主题
文本预览