1 A Distributed Safety-Critical System for Real-Time Train Control
- 格式:pdf
- 大小:66.38 KB
- 文档页数:8
智能化时代就业问题不必过于担忧英语作文全文共3篇示例,供读者参考篇1Employment Concerns in the Age of AI: A Student's PerspectiveAs a student preparing to enter the workforce in the coming years, I can't help but feel a mix of excitement and trepidation about the rapid advances in artificial intelligence (AI) technology. On one hand, the potential applications of AI are vast and could lead to groundbreaking innovations that improve our lives. However, there is also a palpable fear that AI could automate many jobs, leaving countless individuals unemployed and struggling to make ends meet.While I certainly understand these concerns, I don't believe we need to be overly worried about AI completely taking over the job market. Yes, certain routine and repetitive tasks are likely to be automated by AI systems and robots. But history has shown us that technological progress doesn't necessarily lead to long-term unemployment. Instead, it causes a shift in the labormarket where new types of jobs are created to accommodate the new technologies.For example, when automated teller machines (ATMs) were first introduced, there were fears that they would completely eliminate bank tellers. However, that didn't turn out to be the case. Instead, bank tellers took on new roles such as customer service representatives and financial advisors. Similar trends played out during the Industrial Revolution when machinery was able to accomplish many tasks formerly done by human labor. While some jobs were eliminated, countless new jobs emerged in manufacturing, maintenance, logistics, and other areas.The same principle is likely to apply with AI. As certain tasks become automated, new needs and opportunities will arise that require human skills that machines cannot easily replicate. Skills like creativity, critical thinking, emotional intelligence, and complex problem-solving are areas where humans still have a considerable edge over current AI systems.In fact, AI could open up many new fields and professions that we can't even fathom today. Just as few could have predicted the emergence of software engineers, data scientists, and social media managers a few decades ago, the AI revolution will create entirely new job categories and industries. Perhapswe'll need AI ethicists to contemplate the moral implications of AI systems. Or AI-human interaction specialists to ensure seamless collaboration between humans and intelligent machines.Furthermore, AI has the potential to augment human capabilities rather than completely replace them. By handling routine and tedious aspects of a job, AI could free up humans to focus on more creative, strategic, and interpersonal aspects. A lawyer could rely on an AI system to quickly sift through mountains of legal documents and case files, allowing them to devote more time to crafting arguments and providing personalized counsel to clients. A doctor could use AI to accurately diagnose diseases based on symptoms and medical data, enabling them to spend more time communicating with patients and providing empathetic care.Of course, this isn't to say that the transition to an AI-driven economy will be completely smooth sailing. There will undoubtedly be workforce disruptions and certain segments of the population may face difficulties adapting to the changing job landscape. Governments, educators, and businesses will need to proactively address these challenges by investing in retrainingprograms, promoting lifelong learning, and providing a robust social safety net.As students, we will need to be proactive as well. Continuously upgrading our skills, embracing lifelong learning, and developing capabilities that complement AI systems will be crucial for long-term career success. Fortunately, the education system is already evolving to better prepare us for this AI-centric future. Curricula are increasingly emphasizing STEM (science, technology, engineering, and math) subjects as well as soft skills like collaboration, communication, and critical thinking.Ultimately, while AI will certainly transform the nature of work, I don't believe it will lead to permanent, widespread unemployment. Like past technological revolutions, it will cause disruptive shifts in the short-term but open up new frontiers of opportunity in the long run. By being adaptable, continuously learning, and harnessing AI's potential as an augmentation tool rather than an outright replacement, we can thrive in this new era.The future of work may look radically different than it does today, but that future is filled with vast potential if we embrace the changes ahead with open minds and a willingness to evolve. As students, we have the benefit of being digital natives – we'vegrown up surrounded by rapidly evolving technology our entire lives. This unique perspective leaves us well-positioned to not just adapt to, but shape this AI-driven world in innovative ways that our predecessors could scarcely imagine.So while legitimate concerns about AI's impact on employment exist, I don't think we need to succumb to fear and pessimism. With the right mindset, skills, and proactive approach, the Age of AI can be an era of immense opportunity for those willing to meet its challenges head-on.篇2No Need to Worry Too Much About Employment Issues in the Age of AIAs a student about to enter the workforce, I can't help but feel a mixture of excitement and trepidation about the future job market in our increasingly AI-driven world. On one hand, the rapid advancement of artificial intelligence and automation presents incredible opportunities for innovation, efficiency, and progress across industries. However, the prospect of human workers being replaced by machines is an understandable source of anxiety for many.I firmly believe, however, that while the emergence of AI will inevitably disrupt and transform employment as we know it, there is no need for excessive fear or dread. By maintaining an open-minded, adaptable perspective and proactively developing the skills most valued in an AI age, we can position ourselves to thrive alongside technological advancements rather than be diminished by them.To begin, it's crucial to recognize that job displacement due to technological change is nothing new. From the Industrial Revolution's impact on agricultural labor to the more recent effects of computerization on manufacturing roles, innovation has always ushered in periods of employment turbulence. However, over time, new industries and roles inevitably emerge to compensate. While AI may render certain routine, repetitive tasks obsolete, it simultaneously creates unprecedented demand for the uniquely human talents that machines cannot easily replicate.Roles requiring skills such as critical thinking, creativity, emotional intelligence, and complex communication are likely to be our greatest strength in an AI-powered era. As artificial intelligence excels at performing defined, programmable tasks, the value of human ingenuity, problem-solving, and adaptabilitywill only increase. We have an opportunity to be elevated from tedious, menial labor to more engaging, intellectually stimulating work that allows us to exercise the cognitive capabilities that separate us from machines.Of course, this transition will necessitate a shift in how we prepare students and workers for the AI age. Our education systems must evolve to place greater emphasis on developing the soft skills, emotional intelligence, and creativeproblem-solving abilities that will be prized in a world of ubiquitous automation. While technical skills will remain important, the true competitive advantage for human workers will lie in cultivating the intangible, uniquely human qualities that AI struggles to replicate.At the same time, we must encourage a mindset of continuous learning and adaptability. The pace of technological change shows no signs of slowing, and the jobs of the future may look radically different from those of today. Workers at all levels will need to embrace lifelong learning, constantly updating their skills and knowledge to remain relevant in a rapidly evolving landscape. Those who can deftly pivot between roles, learn new technologies, and thrive amid constant change will be the most resilient.It's also worth noting that while AI may displace certain jobs, it will simultaneously generate entirely new categories of employment we can scarcely imagine today. Every major technological revolution, from the printing press to the internet, has ushered in novel industries and professions that were previously inconceivable. AI is likely to be no different, spawning innovative products, services, and business models that create fresh employment opportunities.Entrepreneurs, inventors, and creative thinkers who can envision and bring to life these AI-enabled possibilities will find themselves in high demand. The age of artificial intelligence may very well unleash a new era of human ingenuity and economic renaissance, provided we approach it with open minds and a willingness to adapt.Of course, navigating this transition will not be without its challenges, and a certain degree of disruption is inevitable. Governments, educators, and industry leaders must work collaboratively to develop robust policies, training programs, and social safety nets to support workers displaced by automation. We must strive to ensure that the benefits of AI are equitably distributed and that no segments of society are left behind in this technological shift.However, dwelling excessively on fear or attempting to resist or hinder technological progress is ultimately counterproductive. Throughout history, those who have embraced innovation and adapted to change have consistently fared better than those who clung stubbornly to the past. The age of AI will be no different.As students and future workers, our greatest strengths will be our ability to evolve, think creatively, and harness our innate human capacities in partnership with technological tools like AI. Rather than succumbing to trepidation, we should enthusiastically prepare ourselves to thrive in this new era, confident that our uniquely human talents will remain indispensable and valuable.The road ahead may be uncertain, but those who approach it with optimism, resilience, and a commitment to continuous learning will be well-equipped to navigate the challenges and seize the opportunities that the age of artificial intelligence has to offer. While reasonable caution is prudent, excessive fear or resistance to technological progress is misguided. Humanity's capacity for innovation and our appetite for growth and advancement have consistently propelled us forward, even in the face of daunting upheaval.As I prepare to enter this AI-driven workforce, I choose to embrace the future with open arms, confident in my ability to adapt and determined to develop the skills that will allow me to contribute value in novel, meaningful ways. The age of artificial intelligence is not a force to be feared, but an exciting frontier to be explored – one that has the potential to elevate humanity to new heights of productivity, creativity, and fulfillment in our work lives. With the right mindset and preparation, the prospect of human-machine collaboration fills me not with dread, but with immense possibility.篇3No Need to Worry Too Much About Employment in the Age of AIAs a student preparing to enter the workforce in the coming years, I can't help but think about how the rapid advancement of artificial intelligence (AI) and automation will impact employment prospects. There's no denying that many routine tasks across various industries are being automated, raising concerns about human workers being replaced by machines. However, I believe that while there will be challenges, the rise of AI shouldn't cause excessive worry about job prospects. With theright mindset, skills, and approach, we can adapt and thrive in this technological era.First, it's crucial to understand that technological progress has always disrupted labor markets throughout history. The industrial revolution displaced many agricultural workers, but it also created new jobs in factories and other sectors. Similarly, the computer revolution led to the obsolescence of some roles while paving the way for entirely new professions in software, IT, and related fields. AI and automation represent the next wave of this continuous evolution, but they don't necessarily spell doom for human employment.In fact, AI can be viewed as a powerful tool that augments and enhances human capabilities rather than entirely replacing us. For instance, in healthcare, AI systems can assist doctors in analyzing medical images, identifying patterns, and making more accurate diagnoses. However, the human doctor's empathy, bedside manner, and ability to comprehend the patient's overall well-being cannot be easily replicated by machines. AI can make certain tasks more efficient, but it cannot fully substitute the human element in many professions.Moreover, as AI automates routine and repetitive tasks, it frees up human workers to focus on more complex, creative, andstrategic endeavors that machines cannot handle as effectively. An accountant, for example, may no longer need to spend countless hours manually crunching numbers, thanks toAI-powered data analysis tools. Instead, they can devote their time and mental energy to providing valuable insights, strategic planning, and personalized advice to clients – tasks that require human judgment, critical thinking, and emotional intelligence.Additionally, the rise of AI will inevitably create new job opportunities and industries that we cannot even fathom today, just as past technological revolutions did. Who could have predicted the emergence of roles like social media managers, app developers, or drone pilots a few decades ago? As AI continues to advance, we will likely see a surge in demand for professionals skilled in areas such as AI ethics, algorithm design, data annotation, and human-AI interaction management.To thrive in this AI-driven era, we need to prioritize continuous learning and skill development. Rather than clinging to narrowly defined roles or relying solely on domain-specific knowledge, we must cultivate versatile skillsets and adopt a mindset of lifelong learning. Soft skills like critical thinking, problem-solving, creativity, and emotional intelligence will behighly valued, as these are areas where humans still maintain a distinct advantage over machines.Educational institutions and employers also have a crucial role to play in preparing us for the AI-driven workforce. Universities and colleges should adapt their curricula to incorporate AI literacy, ethical considerations, and interdisciplinary approaches that combine technical knowledge with soft skills. Employers, on the other hand, should invest in upskilling and reskilling their employees, providing them with opportunities to learn new technologies, tools, and methodologies.Furthermore, governments and policymakers must proactively address the potential consequences of AI-driven job displacement. This could involve implementing robust social safety nets, providing retraining programs, and fostering an environment that encourages entrepreneurship and job creation in emerging sectors. Collaboration between the public and private sectors will be essential to manage this transition smoothly.While the rise of AI undoubtedly presents challenges and uncertainties, it also offers exciting opportunities for those willing to adapt and embrace change. Rather than succumbingto fear or complacency, we should view this technological shift as a catalyst for personal growth, innovation, and the creation of new value-added roles for humans.In conclusion, as a student soon to enter the workforce, I remain optimistic about employment prospects in the age of AI. While certain jobs may become obsolete, new opportunities will emerge, and those who cultivate versatile skillsets, embrace lifelong learning, and harness the power of AI as a tool will be well-positioned to thrive. Instead of excessive worry, we should approach this era with a growth mindset, adaptability, and a willingness to continuously reinvent ourselves. The future of work may look different, but it can be a bright one for those who are prepared to navigate the challenges and seize the opportunities presented by AI.。
AADvance培训⼿册中⽂版系统培训⼿册操作系统构建配置编程排除故障维护AADvance可编程控制器指南1.5版本2012年5⽉2AADvance System Training Manual, version 1.5注意The content of this document is confidential to ICS Triplex and their partners. This document contains proprietary information that is protected by copyright. All rights are reserved. No part of this documentation may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying and recording, for any purpose, without the express written permission of ICS Triplex.该⽂件内容对于ICS Triplex和他们的合作⽅均是机密的。
本⽂档包含有受版权保护的专有信息,公司保留其所有权。
没有ICS Triplex明确的书⾯许可,本⽂档的任何部分都不允许以任何电⼦或机械的形式或⽅式被复制和传播,包括复印和记录。
The information contained in this document is subject to change without notice. The reader should, in all cases, consult ICS Triplex to determine whether any such changes have been made.本⽂档所包含信息可以随时更改,不另⾏通知。
电力英语词汇attendant 值班员parameter 参数error 误差petrol 汽油axis 轴physics 物理regulation 调节cause, reason 原因sensitivity 灵敏度clockwise 顺时针tension 张力counter-clockwise 逆时针stress 应力fine 细timer 定时器daily inspection 日常检查shell 外壳data logger 数据自动记录器diameter 直径radius 半径,范围, 辐射光线grid 格栅, 电网heating surface 受热面magnetic field 磁场man-day 工日man-hour 工时minor repair 小修negative 负positive 正orifice 孔, 孔板cotton 棉纱outage 停机, 停运appendix 附录standard 标准inspector 检查员industry 工业buyer 买方seller 卖方consideration 考虑design 设计document 文件radio 对讲机,收音机bellow(s) 波纹管pedestal 轴承座gantry 龙门吊crane 吊车plus 加、正minus 负、减gas-fired 燃气administration building行政楼energy 能量emergency 紧急事故crude(raw) oil 原油panel 盘graphite 石墨tariff 关税choke,jam 阻塞first draft 初稿motor-driven hoist 电动葫芦gasket 密封垫install 安装employee,staff 职工, 雇员layout 平面图water head 水头negotiation 谈判sub-contractor 分包商ASMEC (American Society of Mechanical engineers)美国机械工程师协会IEEE(Institute of Electrical and Electronics Engineers)电气和电子工程师协会ISO (International Standards Organization) 国际标准化组织IEC(International Electromechanical Commission)国际电工委员会crack 裂纹certificate 合格证license 执照wire rope 钢丝绳civil work 土建hoist 吊装fax 传真minutes of meeting 会议纪要contractor 承包商customs 海关L/C (Letter of Credit) 信用证check 支票cast iron 铸铁gold 金illumination 照明度relative 相关的trigger 触发器valid (invalid) 有效(无效)specification 说明书,规范technical 技术的rapper 振打装置carbon 碳brake 制动器、刹车aluminum 铝temper 回火superintendent 监理人knife 小刀import 进口export 出口trade 贸易price 价格F.O.B. 离岸价C.I.F. 到岸价B/L (bill of lading) 提单commission 佣金, 调试specialist 专家supervisor 监理人,监护人work order 工作票operation order 操作票log sheet 报表scaffold 脚手架authorize 公认,授权back-up each other 相互备用requirement 要求commercial operation 商务运行tool 工具date of delivery 交货期design change 设计变更representative 代表,工代welding rod 焊条local fabrication 就地制造site service 现场服务meeting agenda 会议日程name-plate rating 铭牌定值tapping 攻丝drilling machine 钻床grinder 磨床day shift 白班night shift 夜班swing shift 中班three-shift workday system 三班制salary,wage 工资welfare 福利safety helmet 安全帽defect 缺陷off day 休息日gloves 手套pollution 污染operation manual 运行规程stainless steel 不锈钢chiller 冷冻机polish 磨光,抛光helper 帮工coolly (coolie) 苦力,劳工welding machine 电焊机blister 砂眼、水泡bidder 投标者project 工程elevator 电梯clause 条款report 报告construction 建设team 工程队international 国际的as-built drawing 竣工图tender 招标schedule 计划tool 工具consumable 消耗品date of delivery 交货期design basis 设计依据type 型号director 董事长manager 经理,厂长draft 草案trade 贸易company 公司develop 发展erection 安装material 材料foreign exchange 外汇weld 焊接total 总计guarantee 保证contract 合同service 服务inspection 检验,检查commissioning 调试test 试验loan 贷款agreement 协议operation 运行maintenance 检修,维护overhaul 大修equipment 设备shipment 船运meeting 会议name-plate 铭牌offer 报价quotation 报价supplier 供货商coordination 协调technical 技术的evaluation 评估calibration 校准acceptance 验收turn over 成交量,翻转turn key project 交钥匙工程visa 签证engineer 工程师site 现场,工地port, pier 码头price 物价storage 仓库dam 大坝beach 海滩hole 孔洞soil 土址rock 岩石clay 粘土earthquake 地震ecology 生态exploration 勘探farmland 农田flood 洪水plain 平原concrete 混凝土river 河lake 湖quartz 石英stake 标桩(杆)plastic 塑料sample 样品up stream 上游output power 输出功率down stream 下游power factor 功率因素peak 山峰frequency 频率valley 山谷efficiency 效率volcano 火山peak load 高峰负荷well 井horsepower 马力underground 地下ventilation 通风school, academy (专业)学校fax 传真management 管理telephone 电话order 定单scheme 计划,图表fee, cost 费用protocol 协议coal 煤collision 冲突insurance 保险power station 发电厂(站)left 左hydroelectric 水电right 右thermal power station 火力发电站rear 后installed capacity 装机容量DCS—distributed control system 分散控制系统total generation 总发电量unit capacity 单机容量A/D and D/A converter模/数,数/模转换器input power 输入功率output power 输出功率cabinet, cubicle, chamber 柜machine 机械, 机器cock, plug 堵头repair shop 修配车间one-way valve 单向阀assembly 装配hammer 手锤planer 刨工scraper 刮刀fitter 钳工pliers 手钳electrician 电工file 锉lathe 车床saw 钢锯burring 去毛刺steel rule 钢尺ream 铰孔tape measure 卷尺punch 打孔set square 三角板ultrasonic 超声波caliper(s) 卡尺spare part 备件outside caliper 外卡尺bolt 螺栓inside caliper 内卡钳washer 垫圈, 洗衣机micrometer 千分尺thread 螺纹compasses 圆规nut 螺母gap gauge 隙规stud 双头螺栓cement 水泥screw 螺钉lime 石灰rivet 铆钉brick 砖ball bearing 滚珠轴承wood 木头gear 齿轮plan 平面图butterfly valve 蝶阀cross-section 剖面图ladder 梯子radiation 辐射air conditioner 空调convection 对流oilstone 油石amplitude 振幅sandpaper 沙纸resonance 共振paint 油漆record 录音brush 刷子color 颜色porcelain 瓷器red 红container 集装箱yellow 黄canvas 帆布orange 橙friction 摩擦green 绿weight 重量black 黑gravity 重力violet 紫specific gravity 比重white 白direction 方向worker 工人speed 速度technician 技术员force 力chief engineer 总工torque 扭矩assistant engineer 助工engineer 工程师red powder 红丹粉density 密度senior engineer 高工pulley 滑轮shift engineer 值长lever 杠杆operator 运行人员cycle 循环operator attendant 助手foreman 班长refractory 耐火材料welder 焊工foundation 基础designer 设计人员special tool 专用工具passage way 走道operating mode 运行方式on, open 开load rejection 甩负荷off, close 关loss curve 损失曲线standby 备用on site 就地trip 跳闸normal 正常display 显示regular 正常test 试验retention 保持力,滞留金warranty 保证书mark 标记parallel operation 并列运行parallel in 并网glass cement 玻璃胶side view 侧视图dismantle 拆除spade 铲子vehicle 车辆electro mobile 电瓶车harden 淬火piling 打桩unit power output 单机出力guide slot 导槽anchor bolt 地脚螺丝grease 油脂shaft displacement 轴移longitudinal arrangement 纵向布置trouble shooting 事故诊断pressure drop 压降smoke 烟owner 业主phase 1 project 一期工程noise 噪音sleeve wrench 套筒板手core 铁芯flash point 闪点grinding wheel 砂轮redundant 冗余的creep 蠕变feeler 塞尺intake 取水口、进口freeze 凝固extension 扩建span 跨度rectangular 矩形shutdown 停机indicate 显示change over 切换inlet 入口start-up 启动outlet 出口run 运行input 输入output 输出peak load time 高峰负荷时间high 高intermediate 中circulation ration 循环倍率low 低flow diagram 流程图bypass 旁路dimension 尺寸spray 喷水throttle 节流isolation 隔离turbine island 汽机岛turbine 汽轮机turbine master 主控器instrument 仪表rotor 转子collection tank 联接水箱feed water valve 给水阀deaerator 除氧器bypass valve 旁路阀block valve 闭锁阀turbine driven boiler FW pump汽动给水泵control valve 控制阀outlet valve 出口阀motor driven water pump 电动给水泵pilot valve 错油门booster pump 前置泵speed indicator 转速表attemperating pipe 减温管jacking oil pump 顶轴油泵heat exchanger 热交换器oil cooler 冷却器shutdown pump 停机水泵filter, screen 滤网hydrant 水栓silencer 消音器stator 定子suction pump 抽吸泵shaft 轴throttle orifice 节流孔板bearing brass 轴瓦lube oil pump 润滑油泵condenser 凝结器oil purifier 净油器air ejector 抽气器oil tank 储油箱inter cooler 中间冷却器upper water tank 高位水箱after cooler 后冷却器flash tank 扩容器heater 加热器MSV (main steam valve)主汽阀worn out 磨损TSI (turbine supervising instrument)汽机监视仪表peak shaving 调峰idle run 空转babbit metal 巴氏合金differential expansion 胀差end shield 端盖(罩)lug 吊环HPC (high pressure cylinder)高压缸EHG(electric hydraulic governor)电液调thermal system 热力系统ECR (economic continuous rating)经济功率MCR (maximum continuous rating)最大连续功率BFPT (boiler feed water pump turbine)锅炉给水泵汽机condensate 凝结水run up 汽机冲转speed up 升速valve stem 阀杆guide blade 导向叶片alignment 找中心、找正header 联箱L.P.H (LP heater) 低加H.P.H 高加throat 喉部feed water pump 给水泵main stop valve 主汽阀drain tank 疏水箱casing (cylinder) 汽缸drain valve 疏水阀nozzle 喷咀gland steam 轴封bladed disc 轮盘attemperator 减温器journal bearing 径向轴承check valve 逆止阀water seal gland 水封extraction 抽汽governing valve 调节阀regulator 调节器overload valve 过载阀over speed governor 超速保安器speed governor 调速器vacuum trip device 真空跳闸装置synchronizer 同步器vacuum breaker 直空破坏器stop valve 截止阀oil gauge 油位器main oil pump 主油泵condenser leak 凝汽器检漏装置aux. oil pump 辅油泵impeller 叶轮emergency oil pump 事故油泵pneumatic operated valve 气动阀门oil ejector 注油泵radial bearing 径向轴承oil cooler 冷油器thrust bearing 上推轴子turning gear 盘车装置coupling 联轴节hot well 热井damper 档板blade, vane 叶片flange 法兰cascade 叶栅gland heater 轴加signal amplifier 信号放大器dead center 死点converter 交换器idle time 惰走时间unit 单元no load 空负荷gate valve 闸阀turbine follow mode 汽机跟随方式ball valve 球阀balance 平衡needle valve 针阀coordinate mode 协调solenoid valve 电磁阀sliding pressure 滑压back pressure 背压manual 手动critical 临界vibration 振动admission 进汽度expansion 膨胀main steam 主蒸汽measure 测量initial steam 新蒸汽record 记录reheat steam 再热蒸汽station compressed air 站用气exhaust steam 排汽instrument compressed air 仪用气warming-up 暖机vacuum pump 真空泵cooling shutdown 冷却停机fire fighting 消防start-up 启动condensate pump 凝结水泵cold starting 冷态启动circulating water pump循环水泵hot starting 热态启动back wash 反冲洗curve 曲线temperature difference 温差initial load 初负荷detect,inspect 监测rate of load-up 负荷上升率rated condition 额定工况steam consumption 汽耗量potable water 饮用水maximum 最大bar 巴(压力单位) minimum 最小moving blade 动叶片load test 带负荷试验stationary blade 静叶片load-dump test 甩负荷试验damp steam 湿蒸汽trip 跳闸saturated steam 饱和蒸汽stage 级dry steam 干蒸汽enthalpy 焓keep, maintain 维持superheat 过热negative pressure 负压active power 有效功率pneumatic 气动的lube oil 润滑油quality 质量monitor 监视quantity 数量increase 上升,增run away 飞车decrease 下降; 减running balance 动平衡remote control 远控stand by 备用slow, medium, fast 慢,中,快turbine oil 透平油interlock 联锁zero speed 零转速load pick-up 升负荷water to steam ratio 水, 汽比load rejection 甩负荷lacing wire 拉筋follow-up 跟踪diaphragm 隔板air blow 鼓风servomotor 油动机clearance 间隙load limiter 功率限制器lagging 罩壳multi-fuel firing 混烧transfer oil pump 输油泵back fire 回火eccentricity 偏心率vertical 垂直的sound detection 听音检查horizontal 水平的rigid shaft 刚性轴viscosity control 粘度控制oil flushing 油冲洗pipe joint 管接头efficiency 效率expansion joint 膨胀节water chamber 水室flange 法兰tube bundle 管束water hammer 水击relief valve 溢流阀dust 灰尘centrifugal pump 离心泵stabilizer 稳定器gland packing 盘根charging device 充电装置performance test 性能试验discharge electrode 晕化电极elbow 弯头centrifugal 离心manifold 母管,联箱scraper 刮刀,刮板boiler (BLR) 锅炉steam generator 汽发生器,锅炉steam purity 蒸汽纯度FD fan 送风机ID fan 引风机priming 汽水共腾PA fan 一次风机scale 水垢preheater 空预器loss 损失precipitator 除尘器cyclone 旋风分离器pulverizer (mill) 磨煤机steam converter 蒸汽发生器coal feeder 给煤机air duct 风道chimney 烟囱coal hopper 煤斗dumper 翻车机soot blower 吹灰器reclaimer 斗轮机conveyor 皮带机coal crusher 碎煤机lube oil pump 润滑油泵screen 筛网,屏幕flame scanner 火检dewatering bin 脱水仓boiler master 锅炉主控器economizer 省煤器grating 炉棚ash yard 灰场overhead crane 行车auxiliary boiler 小锅炉dryer 干燥器elevator 电梯analogue board 模拟屏furnace 炉膛sensor 传感器burner 燃烧器limit switch 限位开关waterwall 水冷壁display lamp 指示灯signal 信号platform 平台stair s 扶梯LTS 低温过热器LTR 低温再热器metal temperature 金属温度boiler blow out 炉冲管tube burst 爆管light off 点火air duct 风道primary 一次secondary 二次diesel 柴油residual oil 渣油air lock 锁气器down comer 下降管explosion vent 防爆门header 联箱sealing fan 密封风机drum 汽包annunciator window 报警窗air box 风箱ignitor 点火器,油枪air damper 空气档板oil gun 油枪simulator 仿真机fire damper 防火档板fire fighting 消防natural gas 天然气CCR (center control room) 集控室spark 点火, 火花local control panel 地控制盘gas coal 烟煤leak detector 检漏器coal stone 无烟煤main oil cooler 主冷油器combustion 燃烧nitrogen cylinder 氮气瓶pressure difference 压差oil conditioner 油净化器heavy oil 重油oil returning piping 回油母管light oil 轻油purge 吹扫swing valve 摆阀water gauge 水位计trip reset 跳闸复位thermocouple 热偶mill A A磨retractable 可伸缩式load set 负荷设定steam/water separator 汽水分离器blow down 排污nose 折焰角blow off 吹扫stroke 行程atomize 雾化slag 渣flash point 闪点catcher 捕集器hydraulic test 水压试验pendant pipe 悬吊管air side 空侧pressure-relief valve 减压阀gas side 烟侧insulation 绝缘,保温tee pipe T 形管flue gas 烟气three way 三通的throwing off 解列throwing on 并列overload 过负荷fly ash 飞灰type 型号bottom ash 底灰film, membrane 膜throttle orifice 节流孔板riser tube 上升管arch 拱packing 填料steam drum 上汽包quench 熄灭water drum 下汽包scorch 焦化shell 筒体ignition advance 点火提前end plate 封头miscellaneous 杂项manhole 人孔flame alignment 火焰调整reinforcement 加强件evaporation 蒸发量support tube 支承管slag 结渣platen 屏式back pass 尾部烟道finned tube 鳍片管weather-proof 全天候的buck stay 刚性梁weld groove 焊口heating surface 受热面tap pressure 抽头压力quick start 快速启动rated 额定的service factor 运行系数variable pressure operation 变压运行warm-up 暖机continuous blow down (CBD) 联排washing system 冲洗系统periodic blow down (PBD) 定排preservation 保护dry 干wet 温refractory belt 卫燃带dew point 露点electric island 电岛generator 发电机electrode 电极transformer 变压器anode 阳极battery 电池exciter 励磁机parallel 并联cathode 阴极voltage 电压photocell 光电管volt 伏特rectifier 整流器current 电流synchronize 同步DC 直流semi-conductor 半导体AC 交流nuclear reaction 核反应resistance 电阻substation 变电站reactance 电抗earth grounding 接地capacitance 电容charge 充电grid 高压电网ampere 安培power line 电线fuse 保险丝magnet 磁铁lightening rod 避雷针dielectric 电介质motor 电动机insulation 绝缘子phase 相potential 电位steel wire 钢线step-up (down) transformer升(降)压变压器series 串联on (off)-load tap change有(无)载调压开关starter 启动器generator transformer bank发电机变压器组spacer 垫片pad 垫板testing transformer 试验变压器unit transformer 高厂变field extinguishing cabinet 灭磁柜auto transformer 自耦变压器control console 控制台chamber 小室relay 继电器double busbars 双母线feeder 馈线bus bridge 母线桥SCR 硅整流circuit breaker 断路器line trap 阻波器differential relay protection差动继电保护surge arrester 避雷器3-section 三段3-phase 三相switch 开关tripping coil 跳闸线圈breaker 刀闸closing coil 合闸线圈truck, trolley 小车interlock 联锁switchgear cubicle 开关柜battery set 蓄电池组distribution board 配电盘selection switch 选择开关power box 动力箱changeover switch 转换开关accumulator 蓄电池kilowatt (kw) 千瓦megawatt (MW) 兆瓦isolated-phase bus 分相封闭母线AVR (auto voltage regulator)自动调压器diesel generator 柴油发电机MCC (motor control center)电动机控制中心PC (power center) 动力中心aux. power system 厂用电系统frequency 周波AC withstand voltage test 交流耐压试验transient 暂时、瞬时tapped bus 分接母线neutral bus 中性母线boost charge 快充float charge 浮充acoustic 音响PMG (permanent magnet generator)永磁发电机tie branch 联络分支dehydrating breather 吸湿器Buchholz relay 气体继电器radiator 散热器conservator 储油罐gas cell 气盒altitude 高度forced excitation 强励armature winding 定子绕组terminal box 终端盒lead bar 导电杆energize, power up 受电conduit 导管turn insulation 匝间绝缘spring 弹簧dome 冷却器包carbon brush 碳刷prime motor 原动机converter 逆变器sleeper 枕木tolerance 公差corona 电晕、放电shim 垫片alternator 同步发电机armature 电枢frame 支架blinker 吊牌selector switch 选择开关extension line 分机线trunk line 中继线network dispatching center网调中心paging system 对讲系统hose 软管station transformer 启备变OLD (one-line diagram) 单线图movable contact 动触头bush 套管tap changer 分接开关bore 孔、口径、内径field failure 失磁potentiometer 电位计engine 引擎, 发动机MCC (motor control center)电机控制中心weld box 电焊箱zero-sequence 零序active 有功contactor 接触器reactive 无功button 按钮span 间距shunt 分流器flag indicator 掉牌指示jumper 跳线symmetrical 对称delay 延期damper 阻尼器loss of excitation 失磁tester 试验器linking plate 联接片CT ( PT) 电流(压)互感器annunciator 光字牌field breaker 灭磁开关inductive phaser 感应移相器HP sodium lamp 高压钠灯power frequency oscillator 功频振荡器bulb 灯炮measuring instrument 测试仪fluorescent 荧光灯gas analyzer 气体分析仪lead-sheathed 铅皮bridge 电桥cable 电缆universal 万用的PVC cable 塑料绝缘电缆stabilizator 稳压电源oil-filled cable 充油电缆megger 兆欧表cable tray 电缆支架ammeter 安培表cable clamp 电缆卡voltmeter 伏特表shaft 竖井calibration desk 检验台watt-hour meter 电度表earthling rod 接地棒power factor 功率因素phase indicator 相位表phase sequence 相序conductor 导体multi-meter 万用表coil 线圈HF mill voltmeter 高频毫伏表circuit 电路DC galvanometer 直流检流计lamp 指示灯pincer-like galvanometer 钳形电表cell 电池power, supply 电源voltage divider 分压箱level 电平rheostat变阻器plant network厂用电系统ADS (auto dispatching system)自动调度系统gross power总功率turn匝outage停电key switch按键开关interrupter断路器service life使用寿命LED (light emitting diode)发光二极管dispatcher调度员arc电弧magnitude幅值,大小eddy current涡流communication 通讯indicator 显示器plug 插头transmitter 发射器socket 插座carrier 载波relay 继电器UHF(ultra high frequency) 超高频modulator 调制器VHF 甚高频monitor 监视器HF 高频scanner 扫描仪microwave 微波pulse 脉冲filter 滤波器test 测试oscillator 振荡器amplifier 放大器capacitor 电容antenna 天线resistor 电阻器computer 计算机diode 二极管hardware 硬件triode 三极管software 软件transistor 晶体管code 代码paper 纸张MMI (man-machine interface)人机接口gate 门redundancy 冗余byte 字节peripheral device 外设information 信息component 部件,成分block 字组virus 病毒menu 菜单OS (operator station) 操作员站normally open (closed) contact 常开(闭)接点instrument apparatus 仪器actuator 执行器I/O (input/output) 输入/输出vector 矢量floppy disc 软盘hard disc 硬盘resource 资源multiple 多个的information 信息exit 出口,退出access 进入destination 目的地source 源头documentation 文件identification 识别simulation 仿真detail 细节browse 浏览directory 目录implement 实行conversion 转化create 生成format 格式化optional 可选的solenoid 线圈legend 图例furnish 装备topology 拓扑repeater 中継器message 消息desktop 桌面modify 改reference 参考eliminate fault 消除错误replace 更换master (stand-by) 主机(从机)video 影像的audio 听觉的reverse 反相polarity 极性transfer 传送cycle 循环,周期menu bar 菜单条administration 管理feedback 反馈assignment 任务work station 工作站frame 边框scroll 卷轴button 按钮enlarge 扩大reduction 减小click 双击title 标题single loop control 单回路控制analog 模拟digital 数字AS (automation control) 自动系统OM (operation and monitoring system)操作监视系统PU (processing unit) 过程单元SU (server unit) 服务单元deviation 偏差inductive 感应SCS (sequence control system)顺控系统CCS (coordinate control system)协调系统BMS (burner management system)燃烧器管理系统EWS (engineering work station)工程师站card 卡件CRT 彩显PLC (programmable logic controller)可编程逻辑控制器database 数据库cursor 光标activation 激活automatic 自动的manual 手动equipment cubicle 主机柜time delay 延时MFT (main fuel trip) 主燃料跳闸fire protection 灭火保护discharge 放电clutch 离合器FSSS(furnace supervision and safety system 炉膛安全监视系统external 外部的internal 内部的elevation, layer 层ATC (auto turbine control)汽机自动控制signal 信号copy 复制, 拷贝module 模组demand 指令valid (invalid) 有效(无效)fiber optic 光纤preset 预设revise 修改optimum 最佳的tendency analysis 趋势分析program 程序dispose 布置,处理instruction 指令precaution 预防data 数据contract 接点on-line 联机standby 备用off-line 脱机operation 操作RTC (remote terminal control)远方终端控制circuit 电路screen 屏幕impact record 冲击记录器feedback 反馈thermal stress 热应力servomechanism 侍服机构FCB (fast cutback ) 快速切回装置numerical control 数字控制trend 趋势data processing 数据处理camera 相机sensor 传感器automation 自动化UPS (uninterruptible power supply)不停电电源remote control 控制化printer 打印机upper (lower) level system 上(下)级系统transmitter 变送器malfunction 故障vibrometer 振动表failure 故障photoelectric probe 光电探头accident 事故diagnose 诊断pulse signal generator 脉冲信号发生器auto tracing 自动跟踪down time 停机时间BTG panel BTG 盘intelligent alarm 智能报警hard copier 硬拷贝机CPU (central processing unit)中央处理装置graphical 图形的block diagram 方框图governing and protection调节和保护系统closed circuit TV 闭路电视fuse blown 保险熔断compiler 编译程序acoustic alarm 音响报警patrol 巡检DAS (data acquisition system)数据采集系统inspection 检查console 控制台interlock 联锁configuration 组态图phenomena 现象feature 特性; (性能)derivation 导数interface 接口integrate 积分mimic bus 模拟母线proportion 比例dotted recorder 打点记录器ether 以太(网络名)coaxial cable 同轴电缆environmental supervision环境监视encode 译码function 功能keyboard 键盘pulse 脉冲flow regulator 流量调节计regulating range 调节范围terminal 终端RB (run back) 自动减载装置logic 逻辑sampling frequency 采样频率microprocessor 微处理机self-diagnostic function自诊断功能mass storage device 大量存储装置reproducibility 再现性multiplexer 多路调制器start-up mode 启动方式dispatching center 调度中心air compressor 空压机network 网络sub-loop 子回路log of sequence of event 事故顺序记录number of input points 输入点resolution 分辨率SCADA (supervisory control and data acquisition) 监控和数据采集operation guide 操作指导peripheral equipment 外围设备Pneumatic local controller气动就地控制器preamplifier 前置放大器post-trip report 跳闸后报告printout 打印输出PI (proportional-integral) 比例—积分desalter 除盐装置pH value pH值silica 二氧化硅waste water disposal pump 废液泵regeneration tower 再生塔clarifier 除浊装置diluted 稀conductivity 导电率antiscale 防垢剂condensate polishing 精处理water washing 水洗methyl benzene 甲苯sediment 沉淀物sludge 污水、沉积物dissolve 溶解deoxidant 脱氧剂tray-spray 淋水盘dosing (dose) 剂量、加药coolant 冷却剂demi. water 除盐水relative 相对的lab (laboratory) 试验室copper 铜purified water 净水raw water tank 原水箱hardness 硬度oxide 氧化物turbidity 混浊度water treatment 水处理cation 阳离子analysis 分析anion 阴离子transparent 透明resin 树脂strainer 滤网sampler 取样器acid cleaning 酸洗sodium hydroxide 氢氧化钠sewer manhole 下水道入孔aluminum oxide 氧化铝resin catcher 树脂捕捉器potassium hydroxide 氢氧化钾phosphate 磷酸盐injection pump 喷射泵mild steel 低碳钢screen 滤网mercury 水银ball catcher 胶球捕集器hydrogen generating unit氢发生装置oxygen 氧量hydrochloric acid 盐酸carbon dioxide (CO2) 二氧化碳distillation 蒸馏chlorine 氯absorption 吸收neutralization 中和funnel 漏斗separate 分离beaker 烧杯corrosion 腐蚀test tube 试管dilute 稀释ion exchanger 离子交换器solution 溶解mixed bed 混床concentration 浓度cation bed 阳床reagent 试剂anion bed 阴床electrolysis 电解abrasion, friction 磨擦reduction 还原humidity 湿度chemical change 化学变化absolute 绝对displacement 置换pressure 压力chemicals 化学temperature 温度spectrum 光谱water 水booster pump 前置泵steam 汽chemical dosing pump 加药泵acceptance 验收acid 酸aging 老化coagulant 凝聚剂methane 甲烷agitator 搅拌器ethane 乙烷air bottle (cylinder) 气瓶test paper 试纸alcohol 醇,酒精weight 砝码measuring cylinder 量筒alkali ( base ) 碱reaction 反应degasser 除气器alloy 合金demineralization 除盐alum 明矾dimension 尺寸ambient temperature 环境温度dropper 滴管ammonia 氨balance 天平curve 曲线electrolyte 电解液analyzer 分析仪epoxy resin 环氧树脂anticorrosion 防腐equivalent 当量appearance 表面application 应用asbestos 石棉backwash 反洗hardness 硬度bleach 漂白hazard 危险, 事故brass 黄铜buret 滴定管label 标签reason, cause 原因lining 内衬cistern 槽车live steam 新蒸汽cooling tower 凉水塔liquor 液体water treatment 水处理solid 固体water pretreatment 水预counter 计数器mesh 筛目,目数deep well 深井moisture 水分, 湿度deformation 变形neutralization 中和passivant 钝化剂parts per thousand (ppth) 千分率reductant 还原剂precipitant 再生剂soda 苏打rinse 漂洗velocity 速度rust 锈sponge 海绵rubber 橡胶taste 味道reservoir 水库,水池Orsat gas analyzer 奥气体分析仪purity 纯度mica 云母viscometer 粘度计bias 偏压benzene 苯colorimeter 比色表。
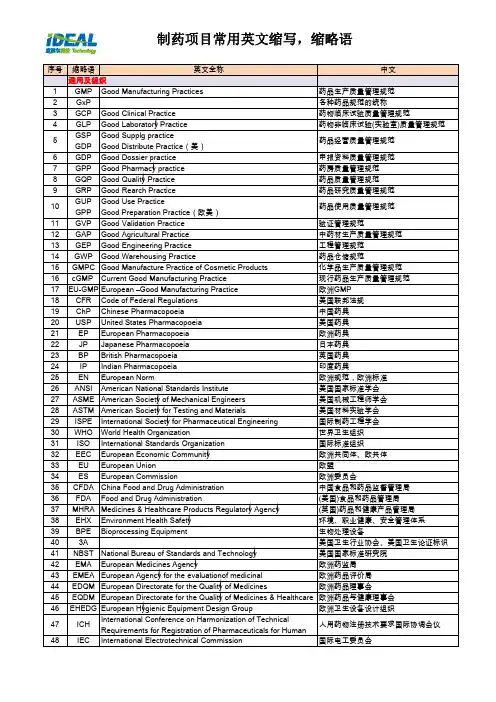
1GMP Good Manufacturing Practices药品生产质量管理规范2GxP各种药品规范的统称3GCP Good Clinical Practice药物临床试验质量管理规范4GLP Good Laboratory Practice药物非临床试验(实验室)质量管理规范5GSPGDPGood Supplg practiceGood Distribute Practice(美)药品经营质量管理规范6GDP Good Dossier practice申报资料质量管理规范7GPP Good Pharmacy practice药房质量管理规范8GQP Good Quality Practice 药品质量管理规范9GRP Good Rearch Practice药品研究质量管理规范10GUPGPPGood Use PracticeGood Preparation Practice(欧美)药品使用质量管理规范11GVP Good Validation Practice验证管理规范12GAP Good Agricultural Practice中药材生产质量管理规范13GEP Good Engineering Practice工程管理规范14GWP Good Warehousing Practice药品仓储规范15GMPC Good Manufacture Practice of Cosmetic Products化学品生产质量管理规范16cGMP Current Good Manufacturing Practice现行药品生产质量管理规范17EU-GMP European –Good Manufacturing Practice欧洲GMP18CFR Code of Federal Regulations美国联邦法规19ChP Chinese Pharmacopoeia中国药典20USP United States Pharmacopoeia美国药典21EP European Pharmacopoeia欧洲药典22JP Japanese Pharmacopoeia日本药典23BP British Pharmacopoeia英国药典24IP Indian Pharmacopoeia印度药典25EN European Norm欧洲规范,欧洲标准26ANSI American National Standards Institute美国国家标准学会27ASME American Society of Mechanical Engineers美国机械工程师学会28ASTM American Society for Testing and Materials美国材料实验学会29ISPE International Society for Pharmaceutical Engineering国际制药工程学会30WHO World Health Organization世界卫生组织31ISO International Standards Organization国际标准组织32EEC European Economic Community欧洲共同体、欧共体33EU European Union欧盟34ES European Commission欧洲委员会35CFDA China Food and Drug Administration中国食品和药品监督管理局36FDA Food and Drug Administration(美国)食品和药品管理局37MHRA Medicines & Healthcare Products Regulatory Agency(英国)药品和健康产品管理局38EHX Environment Health Safety环境、职业健康、安全管理体系39BPE Bioprocessing Equipment生物处理设备403A美国卫生行业协会、美国卫生论证标识41NBST National Bureau of Standards and Technology美国国家标准研究院42EMA European Medicines Agency欧洲药监局43EMEA European Agency for the evaluationof medicinal欧洲药品评价局44EDQM European Directorate for the Quality of Medicines欧洲药品理事会45EQDM European Directorate for the Quality of Medicines & Healthcare欧洲药品与健康理事会46EHEDG European Hygienic Equipment Design Group欧洲卫生设备设计组织47ICH International Conference on Harmonization of TechnicalRequirements for Registration of Pharmaceuticals for Human人用药物注册技术要求国际协调会议48IEC International Electrotechnical Commission国际电工委员会通用及组织49NEMA National Electrical Manufacturers Association美国电器制造商协会50CEP Certificate of Suitability for European Pharmacopeia欧洲药典适用性证书51CE Conformite Europeenne欧洲电气安全论证52PIC/S Pharmaceutical Inspection ConventionPharmaceutical Inspection Cooperation Scheme国际医药品稽查协约组织53HHS United States Department of Health and Human Services美国卫生及公共服务部、美国卫生部54PDA Parenteral Drug Association(美国)注射剂协会55EPA Environmental Protection Agency(美国国家)环境保护局56CDER Center for Drug Evaluation and Research药物评价与研究中心57MHWMHLWMinistry of Health and WelfareMinistry of Health, Labor and Welfare(日本)厚生省(日本)厚生劳动省5821 CFR Title 21―Food and Drugs美国联邦法规,第21篇,食品与药品59Part11Electronic Records; Electronic Signatures第11节,电子记录与电子签名60Part210Current Good Manufacturing Practice in Manufacturing,Processing,Packing,or Holding of Drugs;General第210节,药品生产、加工、包装、储存质量规范部分61Part211Current Good Manufacturing Practice for Finished第211节,制剂药物生产质量规范部分62Part314Applications for FDA Approval to Market a New Drug第314节,新药上市申请部分63Part320Bioavailability and Bioequivalence Requirements第320节,生物利用度和等效性要求1QMS Quality Management System质量管理体系2QRS Quality Regulation System质量控制体系3QA Quality Assurance质量保证4QC Quality Control质量控制5QM Quality Management质量管理6QI Quality Inspection质量检验7QP Quality Plan质量计划8QRM Quality Risk Management质量风险管理9URS User Requirement Specification用户需求10DQ Design Qualification设计确认11IQ Installation Qualification安装确认12OQ Operational Qualification操作确认13PQ Performance Qualification性能确认14VIT Vendor Internal Test供应商内部测试15FAT Factory Acceptance Test工厂验收测试16SAT Site Acceptance Test现场验收测试17SOP Standard of Operation标准操作规程18FDS Functional and Design Specifications功能设计说明、功能设计规范19FS Functional Specifications功能说明20DS Design Specifications设计说明21TS Technical Specification技术说明、技术规范22RTM(TM)Requirement Traceability Matrix需求追溯矩阵23ITR Inspection Test Reports检查测试报告24QOR Quality Observation Report质量检查报告25QR Quality Requirements质量要求26QR Quality Records质量记录27RA Risk Assessment风险评估28SIA System Impact Assessment系统影响性评估29CCA CriticalComponents Assessment部件关键性评估30PV Process Validation工艺验证31CV Cleaning Validation清洁验证32CSV Computer System Validation计算机验证33VMP Validation Master Plan 验证主计划质量、验证34VP Validation Plan 验证计划35VP Validation Protocol验证方案36VR Validation Report验证报告37PVP Project Validation Plan项目验证计划38PVR Project Validation Report项目验证报告39QbD Quality by Design质量源于设计40DMF Drug Master File药品主文件、药物管理档案41FMEA Failure Mode and Effects Analysis失效模式和效果分析42SST System Suitability Test系统适应性测试43CAL Calibration校验、校准44CAPA Corrective Action and Preventive Action纠正预防措施45RCA Root Cause Analysis根本原因分析46ERES Electronic Record and Electronic Signature电子记录与电子签名47AQL Acceptable Quality Level可接受质量水平48CQA Critical Quality Attribut关键质量属性49CPP Critical Process Pararneter关键工艺参数50CTD Common Technical Document通用技术文件51IA Impact Assessment影响评估52PQR Procut Quality Review产品质量回顾53COA Certification of Analysis分析合格证书、检验报告54BPR Batch Production Records批生产记录55BR Batch Records批记录56CC Change Control变更控制57DR Deviation Records偏差记录58COM Commissioning试车59BAR Batch Analysis Record批检验记录60PP Process Procedure工艺规程61OOS Out of Specification超出标准(限度)62LAL Limulus Smoebocyte Lysate鲎试剂63AQL Acceptable Quality Level可接受质量水平64SMF Site Master File工厂主文件65PM Preventive Maintenance预防性维修66QP Qualified Person质量授权人67R&D Research and Development研发部门68NDA New Drug Application新药申请电气及自控1GAMP Good Automated Manufacturing Practices设备自动化生产管理规范2HMI Human Machine Interface人机界面3OIT Operator Interface Terminals操作员界面终端4OIP Operator Interface Panel操作员界面面板5PLC Programmable Logic Controller可编程序控制器6PCS Process Control System过程控制系统7DCS Distributed Control System集散控制系统8PCS Process Control System工艺控制系统9DDC Direct Digital Controller直接数字控制器10IPC Industrial Personal Computer工业控制计算机,工控机11PAC Programmable Automation Controller可编程自动化控制器12PCC programmable computer controller可编程计算机控制器13MCU Microcontroller Unit单片机14CPU Central Process Unit中央处理器15PC Personal Computer个人电脑16SCADA Supervisory Control And Data Acquisition监控及数据采集17SDS Software design specification软件设计说明18HDS Hardware Design Specification硬件设计说明19FL Functional Logic功能逻辑说明20I/O Input / Output输入/输出21AI Analog Input模拟量输入22AO Analog Output模拟量输出23DI Digital Input数字量输入24DO Digital Output数字量输出25RTD Resistance Temperature Detector热电阻26T/C Thermocouple热电偶27RTU Remote Terminal Unit远程终端单元28ARS Automation Requirement Specification自动化需求规范29VFD Variable Frequency Drive变频驱动30EMC Electromagnetic Compatibility电磁兼容31UPS Uninterrupted Power supply不间断电源32EPS Emergency Power supply应急电源33FL Functional Logic功能逻辑说明34ER and Electronic Signature电子记录35ES Electronic Signature电子签名36AT Audit Trail审计踪迹37NO Normally Open常开38NC Normally Close常关39FO Fault Open故障开40FC Fault Close故障关41AC Alternating Current交流42DC Direct Current直流43PID Proportional Integral Derivative比例积分微分44LED Light Emitting Diode发光二极管45LCD Liquid Crystal Display液晶显示器46LIMS Laboratory Information Management System实验室信息管理系统 47LECP Laboratory Equipment Calibration Program实验室仪器校准程序48WMS Warehouse Management System仓库管理系统49MES Manufacturing Execution System制造执行系统50ERP Enterprise Resource Planning企业资源计划其它1N/A Not Applicable不适用2NLT Not Less Than不少于3NMT Not More Than不多于4NB Nominal Bore公称管径5PED Pressure Equipment Directive压力设备指令(欧洲) 6PW Purified Water纯化水7WFI Water for Injections注射用水8PS Pure Steam纯蒸汽发生器9PWG PW Generator Unit纯化水制备机组10WFIG WFI Generator注射用水制备机组11MEWD Multi-effect Water Distillator 多效蒸馏水机12PSG PS Generator纯蒸汽发生器13PAC Poly Alumina Chlorine聚合氯化铝14DW Demineralized Water脱盐水,去离子水15MF Micro-Filter微滤16UF Ultra-Filter 超滤17NF Nano-Filter纳滤18MMF Multi-Media Filter多介质过滤器19ACF Activated Carbon Filter活性炭过滤器20SF Softener软化器21DG Degasifier脱气塔22RO Reverse Osmosis 反渗透23EDI Electrodeionization电法去离子24MB Mixed Bed混床25MDG Membrane Degasifier膜脱气26COP Clean out Place离线清洗27CEB Chemical Enhanced Backwash化学增强反冲洗28CIP Clean In Place在线清洗29SIP Sterilization in Place在线灭菌30POU Point Of Use使用点31PH Potential of Hydrogen酸碱度32TOC Total Organic Carbon总有机碳33ORP Oxidation-Reduction Potential氧化还原电位34COD Chemical Oxygen Demand化学耗氧量35BOD Biological Oxygen Demand生物耗氧量36SDI Silt Density Index污染密度指数37TUB Turbidity浊度38TSS Suspended Solid总悬浮固体39DO Dissoved Cxygn溶解氧40TDS Total dissolved solids总溶解固体41TH Total Hardness总硬度42PAT Process Analytical & Measurement Technology过程分析技术43IRS Installation Requirement Specification安装要求说明44OEM Original Equipment Manufacturer 原始设备制造商45GDS General Design Specification总体设计说明46DDS Detailed Design Specification详细设计说明47PCP Preparation of Construction Plan施工组织设计48WMS Work Method Statement施工方案49BOQ Bill of Quantities工程量清单50BOM Bill of Material材料清单51P&ID Process and Instrumentation Diagram工艺与仪表流程图52PFD Process Flow Diagram工艺流程示意图53ANDA Abbreviation New Drug Application仿制药或仿制新药申请54OPQ Operational Personnel Qualification操作人员资格鉴定55MBT Microbiologic Test微生物测定56ADR Adverse Drug Reaction药物副作用报告,药品不良报告57OMM Operating and Maintenance Manual操作和维护保养手册58HACCP Hazard Analysis and Critical Control Point危害分析及关键环节控制点59CCP Critical Control Point关键环节控制点60IPC In Process Control过程控制61IPC Intermediate Production Control中间生产控制62CIPC Critical In-Process Control关键中间控制点63MBR Master Batch Record主生产批记录64PPM Parts Per Million百万分之一65OC Organizational Charts组织结构图66FIT Filter Integrity Test过滤器完整性测试67WIT Water Intergrity Test水侵入测试68GA General Arrangement总平面图69RPM Rotations per minute转/分70PD Prescription Drug处方药71Rx Receptor x处方药72NPD Nonprescription Drug非处方药73OTC Over The Counter非处方药74API Active Pharmaceutical Ingredient原料药、活性药75BPC Bulk Pharmaceutical Chemical原料药(原简称)76DS Drug Substance原料药77DP Drug Product成品药78RO Restriction orifice限流孔板79SG Sight Glass视镜80LG Lamp Glass,Light Glass灯镜81RD Rupture Disk爆破片材料1MOC Material Of Construction建造材质2SS Stainless Steel不锈钢3CI Cast iron铸铁4NCI Nodular east iron球墨铸铁5CS Carbon Steel碳钢6 C.Stl Cast Steel铸钢7 F.Stl Freezing Steel锻钢8PA Polyamide聚酰胺9PB Polybutylene聚丁烯10PC Polycarbonate聚碳酸酯11PE Polyethylene聚乙烯12PEX Cross-linked PolyEthylene交联聚乙烯13HDPE High-density polyethylene plastics高密度聚乙烯14MDPE Medium-density polyethylene plastics中密度聚乙烯15PO Polyolefin聚烯烃16PP Polypropylens聚丙烯17FRPP Polypropylens玻纤增强聚丙烯18PPR Polypropyla无规共聚聚丙烯19PPS PolyPhenylene Sulfide聚苯硫醚20PS Polystrene聚苯乙烯21PU Polyurethane,或者缩写为PUR聚氨酯22POM PolyOxyMethylene or Polyacetal聚甲醛,聚氧化亚甲基23HIPS High impact polystyrene高抗冲聚苯乙烯26PFA Polyfluoroalkoxy四氟乙烯—全氟烷氧基乙烯基醚共聚物27PTFE Polytetrafluoroethylene聚四氟乙烯28PVDF Poly vinylidene fluofide聚偏二氟乙烯29PVC Polyvinyl chloride聚氯乙烯30UPVC Unplasticised Polyvinyl Chloride硬聚氯乙烯,增强聚氯乙烯31CPVC Chlorinated polyvinyl chloride,或者缩写为PVCC氯化聚氯乙烯32PA Nylon,Polyamide尼龙,聚酰胺33PES PolyEtherSulfone聚醚砜,聚酯34AAS Acrylonirile butadiene styrene丙烯腈-丙烯酸酌-苯乙烯35ABS Acrylonitrile-Butadiene-Styrene丙烯腈-丁二烯-苯乙烯共聚物36ACS Acrylonitrile Chlorinated polyethylene Styrene丙烯胯-氯化聚乙烯-苯乙烯37ASB Asbestos石棉38PMMA Polymethel methacrylate聚甲基丙烯酸甲酯39SR Styrene-rubber苯乙烯橡胶24EPDM Ethylene Propylene Diene Monomer三元乙丙橡胶25EPM Ethylene Propylene Methylene乙丙橡胶,乙烯/丙烯共聚物40SR Silicone rubber硅橡胶40HTV High Temperature Vulcanization高温硫化(硅橡胶)40RTV Room Temperature Vulcanization室温硫化(硅橡胶)40MQ Silicone rubber甲基硅橡胶40VMQ Silicone rubber甲基乙烯基硅橡胶40PVMQ Silicone rubber甲基乙烯基苯基硅橡胶41FPMFKMFluororubberFluorocarbon Rubber氟橡胶42NBR Vulcanized nitrile rubber丁腈橡胶43FRP Glass Fibre Reinforced Plastic玻璃钢,玻璃纤维增强塑料1HVAC Heating Ventilation and Conditioning供热通风空调2AC Air Conditioner空调3AHU Air Handling Unit空气处理单元4BMS Building Monitoring System建筑管理系统、楼宇检测系统5CFU Colony Forming Unit菌落形成单位6CNC Controlled Non-Classified控制但未分级7FFU Fan Filter Unit风机过滤单元8FMS Factory Monitoring System车间监控系统9HEPA High Efficiency Particulate Air高效空气过滤器10LAF Laminar Air Flow层流、单向流11UDF Unidirectional Flow单向流12RABS Restricted Access Barrier Systems限制通过隔离系统13DP Differential Pressure压差14SDP Static Differential Pressure静压差15RH Relative Humidity相对湿度16CHWs Chilled Water (Supply)冷冻水(供给)17CWr Cooling Water (Return)冷却水(回流)18HW Hot Water热水19FS Factory Steam工厂蒸汽20SC Steam Condensate蒸汽冷凝水21WD Waste Drain废水排放22PWW Process Wastewater工艺污水23CA Compressed Air压缩空气24PA Process Air工艺压缩空气25IA Instrument Air仪表压缩空气26RW Raw Water原水27SW Soft Water软水28MW Middle Water中水29DW Domestic Water生活用水30CW City Water市政供水、自来水31DK Drinking Wat 饮用水32LPG Liquefied Petroleum Gas液化石油气33LNG Liquefied Natural Gas液化天然气34CNG Compressed natural gas压缩天然气35VE Visual Examination外观检查36UT Ultrasonic inspection Test超声探伤37RT Radiographic inspection Test射线探伤38MT Magnetic particle inspection Test磁粉探伤39PT liquid Penterant inspection Test液体渗透探伤40AutoclaveSterilizer灭菌柜公用工程41FBD Fluid Bed Dryer流化床42BFS Blowing Filling and Sealing吹灌封43HPLC High Pressure Liquid Chromatograph高效液相色谱44TLC Thin Layer Chromatograph薄层色谱45GC Gas Chromatograph气相色谱46UV Ultra-Violet紫外线47IR InfraRed红外线48RFQ Request for Quotations报价征询书49NPT American standard taper pipe thread美国标准锥管螺纹50NPS American standard straight pipe thread美国标准直管螺纹51NF American national fine thread美国标准细牙螺纹52NC American national coarse thread美国标准粗牙螺纹53Union Union活接头,由宁。

S7 分布式故障安全系统使用入门S7 Distributed Safety System Getting Started摘要 安全工程的目的是通过使用安全为导向的技术安装,尽可能地使对人员和环境的危害最小化。
本文档通过一个简单实例来描述西门子分布式故障安全系统的概念、配置、编程以及通讯,去除掉手册过多的文字性描述,以便用户能够用较短的时间增强对西门子分布式故障安全系统的了解。
关键词 安全,分布式安全,PROFISAFE通信,安全处理器、安全信号模板Key Words Safety, Distributed Safety, PROFISAFE Communication, F-CPU, F-SMA&D Service & Support Page 2-32目录S7 分布式故障安全系统使用入门 (1)1. 故障安全系统概述 (5)1.1什么是故障安全自动化系统 (5)1.2西门子安全集成的概念 (5)1.3SIMATIC S7中的故障安全系统 (5)1.3.1 SIMATIC S7自动化系统提供两种故障安全系统: (5)1.3.2 可实现的安全要求 (6)1.3.3 S7 Distributed Safety 和 S7 F/FH Systems 中的安全功能原理 (6)2.S7 DISTRIBUTED SAFETY 组件 (7)2.1硬件组件 (7)2.2软件组件 (8)3. 分布式故障安全系统的组态和编程 (9)3.1综述 (9)3.1.1 本例程使用的设备结构图 (9)3.1.2 软硬件列表 (10)3.2硬件组态步骤 (10)3.2.1 组态硬件 (10)3.2.2 组态 F-CPU (11)3.2.3 组态 F-IO (12)3.3程序结构 (15)3.4程序实例 (16)3.4.1 配置F-FB (16)3.4.2创建Failsafe Runtime Group (17)3.4.3 在OB35中调用F-CALL (19)3.4.4 编译下载Failsafe程序 (19)3.5程序测试 (20)3.5.1 F_ESTOP1运行结果 (20)3.5.2 急停信号的钝化与去钝 (21)A&D Service & Support Page 3-324. 分布式故障安全系统通信 (23)4.1综述 (23)4.2硬件组态 (24)4.2.1 从站组态 (24)4.2.2 添加从站 (24)4.2.3 组态安全相关的通信地址区 (24)4.2.4 编程通信 (27)4.2.5 通信结果 (29)A&D Service & Support Page 4-321. 故障安全系统概述1.1 什么是故障安全自动化系统故障安全自动化系统(F 系统)用于控制可以在关闭后立即达到安全状态的过程。
电力系统power system发电机generator励磁excitation励磁器excitor电压voltage电流current升压变压器step-up transformer母线bus变压器transformer空载损耗no-load loss铁损iron loss铜损copper loss空载电流no-load current有功损耗active loss无功损耗reactive loss输电系统power transmission system高压侧high side输电线transmission line高压high voltage低压low voltage中压middle voltage功角稳定angle stability稳定stability电压稳定voltage stability暂态稳定transient stability电厂power plant能量输送power transfer 交流AC直流DC电网power system落点drop point开关站switch station调节regulation高抗high voltage shuntreactor并列的apposable裕度margin故障fault三相故障three phase fault分接头tap切机generator triping高顶值high limited value静态static (state)动态dynamic (state)机端电压控制AVR电抗reactance电阻resistance功角power angle有功(功率)active power电容器Capacitor电抗器Reactor断路器Breaker电动机motor功率因数power-factor定子stator阻抗impedance功角power-angle电压等级voltage grade有功负载: active load PLoad无功负载reactive load档位tap position电阻resistor电抗reactance电导conductance电纳susceptance上限upper limit下限lower limit正序阻抗positive sequenceimpedance负序阻抗negative sequenceimpedance零序阻抗zero sequenceimpedance无功(功率)reactive power功率因数power factor无功电流reactive current斜率slope额定rating变比ratio参考值reference value电压互感器PT分接头tap仿真分析simulation analysis下降率droop rate传递函数transfer function框图block diagram受端receive-side同步synchronization保护断路器circuit breaker摇摆swing阻尼damping无刷直流电机Brusless DC motor刀闸(隔离开关) Isolator机端generator terminal变电站transformer substation 永磁同步电机Permanent-magnet Synchronism Motor异步电机Asynchronous Motor 三绕组变压器three-column transformer ThrClnTrans双绕组变压器double-column transformer DblClmnTrans固定串联电容补偿fixed series capacitor compensation双回同杆并架double-circuit lines on the same tower单机无穷大系统one machine - infinity bus system励磁电流Magnetizing current 补偿度degree of compensation 电磁场:Electromagnetic fields失去同步loss ofsynchronization装机容量installed capacity无功补偿reactive powercompensation故障切除时间fault clearingtime极限切除时间critical clearingtime强行励磁reinforced excitation并联电容器shunt capacitor<下降特性droop characteristics线路补偿器LDC(line dropcompensation)电机学Electrical Machinery自动控制理论AutomaticControl Theory电磁场Electromagnetic Field微机原理Principle ofMicrocomputer电工学Electrotechnics电路原理Principle of circuits电机学Electrical Machinery电力系统稳态分析 Steady-State Analysis ofPower System电力系统暂态分析Transient-State Analysis ofPower System电力系统继电保护原理Principle ofElectrical System's RelayProtection电力系统元件保护原理 Protection Principle ofPower System 's Element电力系统内部过电压 PastVoltage within Power system模拟电子技术基础 Basis ofAnalogue Electronic Technique数字电子技术 DigitalElectrical Technique电路原理实验Lab. ofprinciple of circuits电气工程讲座 Lectures onelectrical power production电力电子基础Basicfundamentals of powerelectronics高电压工程 High voltageengineering电子专题实践Topics onexperimental project ofelectronics电气工程概论Introduction toelectrical engineering电子电机集成系统Electronicmachine system电力传动与控制Electrical Drive and Control电力系统继电保护Power System Relaying Protection 主变压器main transformer升压变压器step-up transformer降压变压器step-down transformer工作变压器operating transformer备用变压器standby transformer公用变压器common transformer三相变压器three-phase transformer单相变压器single-phase transformer带负荷调压变压器on-load regulating transformer变压器铁芯transformer core变压器线圈transformer coil变压器绕组transformer winding变压器油箱transformer oil tank变压器外壳transformer casing变压器风扇transformer fan变压器油枕transformer oilconservator(∽drum变压器额定电压transformer reted voltage变压器额定电流transformer reted current变压器调压范围transformer voltageregulation rage配电设备power distribution equipmentSF6断路器SF6 circuit breaker开关switch按钮button隔离开关isolator,disconnector真空开关vacuum switch刀闸开关knife-switch接地刀闸earthing knife-switch电气设备electrical equipment变流器current converter电流互感器current transformer电压互感器voltage transformer电源power source交流电源AC power source直流电源DC power source工作电源operating source备用电源Standby source强电strong current弱电weak current继电器relay信号继电器signal relay电流继电器current relay电压继电器voltage relay跳闸继电器tripping relay合闸继电器closing relay中间继电器intermediate relay时间继电器time relay零序电压继电器zero-sequence voltage relay 差动继电器differential relay闭锁装置locking device遥控telecontrol遥信telesignalisation遥测telemetering遥调teleregulation断路器breaker,circuit breaker少油断路器mini-oilbreaker,oil-mini-mum breaker高频滤波器high-frequency filter组合滤波器combined filter常开触点normally opened contaact常闭触点normally closed contaact并联电容parallel capacitance保护接地protective earthing熔断器cutout,fusible cutout电缆cable跳闸脉冲tripping pulse合闸脉冲closing pulse一次电压primary voltage二次电压secondary voltage并联电容器parallel capacitor无功补偿器reactive powercompensation device消弧线圈arc-suppressing coil母线Bus,busbar三角接法delta connection星形接法Wye connection原理图schematic diagram一次系统图primary system diagram二次系统图secondary system diagram两相短路two-phase short circuit三相短路three-phase short circuit单相接地短路single-phase ground shortcircuit短路电流计算calculation of short circuitcurrent自动重合闸automatic reclosing高频保护high-freqency protection距离保护distance protection横差保护transverse differential protection纵差保护longitudinal differential protection线路保护line protection过电压保护over-voltage protection母差保护bus differential protection 瓦斯保护Buchholtz protection变压器保护transformer protection电动机保护motor protection远方控制remote control用电量power consumption载波carrier故障fault选择性selectivity速动性speed灵敏性sensitivity可靠性reliability电磁型继电器electromagnetic无时限电流速断保护instantaneously over-currentprotection跳闸线圈trip coil工作线圈operating coil制动线圈retraint coil主保护main protection后备保护back-up protection定时限过电流保护definite time over-currentprotection三段式电流保护the current protection withthree stages反时限过电流保护inverse time over-currentprotection方向性电流保护the directional currentprotection零序电流保护zero-sequence currentprotection阻抗impedance微机保护Microprocessor ProtectionAGC Automatic GenerationControl 自动发电控制AMR Automatic MessageRecording 自动抄表ASS AutomaticSynchronized System 自动准同期装置ATS Automatic TransformSystem 厂用电源快速切换装置AVR Automatic VoltageRegulator 自动电压调节器BCS Burner Control System燃烧器控制系统BMS Burner ManagementSystem 燃烧器管理系统CCS Coordinated ControlSystem 协调控制系统CIS Consumer InformationSystem 用户信息系统CRMS Control RoomManagement System 控制室管理系统CRT Cathode Ray Tube 阴极射线管DA Distribution Automation 配电自动化DAS Data Acquisition System 数据采集与处理系统DCS Distributed Control System 分散控制系统DDC Direct Digital Control 直接数字控制(系统)DEH Digital Electronic Hydraulic Control 数字电液(调节系统)DMS Distribution Management System 配电管理系统DPU Distributed Processing Unit 分布式处理单元DSM Demand Side Management 需求侧管理EMS Energy Management System 能量管理系统ETS Emergency Trip System 汽轮机紧急跳闸系统EWS Engineering Working Station 工程师工作站FA Feeder Automation 馈线自动化FCS Fieldbus Control System 现场总线控制系统FSS Fuel Safety System 燃料安全系统FSSS Furnace Safeguard Supervisory System 炉膛安全监控系统FTU Feeder Terminal Unit 馈线远方终端GIS Gas InsulatedSwitchgear 气体绝缘开关设备GPS Global PositionSystem 全球定位系统HCS Hierarchical ControlSystem 分级控制系统LCD Liquid Crystal Display液晶显示屏LCP Local Control Panel 就地控制柜MCC Motor Control Center(电动机)马达控制中心MCS Modulating ControlSystem 模拟量控制系统MEH Micro ElectroHydraulic Control System给水泵汽轮机电波控制系统MIS ManagementInformation System 管理信息系统NCS Net Control System网络监控系统OIS Operator InterfaceStation 操作员接口站OMS Outage ManagementSystem 停电管理系统PAS Power ApplicationSoftware 电力应用软件PID Proportion IntegrationDifferentiation 比例积分微分PIO Process Input Output过程输入输出(通道)PLC Programmable LogicalController 可编程逻辑控制器PSS Power SystemStabilizator 电力系统稳定器RTU Remote Terminal Unit站内远方终端SA Substation Automation变电站自动化SCADA SupervisoryControl And DataAcquisition 数据采集与监控系统SCC Supervisory ComputerControl 监督控制系统SCS Sequence ControlSystem 顺序(程序)控制系统SIS Supervisory InformationSystem 监控信息系统TDCS(TDC)Total DirectDigital Control 集散控制系统TSI Turbine SupervisoryInstrumentation 汽轮机监测仪表UPS Uninterrupted PowerSupply 不间断供电WMS Work ManagementSystem 工作管理系统。
电⼒系统常⽤英⽂词汇电⼒专业英语词汇(较全)1、元件设备三绕组变压器three-column transformer ThrClnTrans 双绕组变压器double-column transformer DblClmnTrans 电容器Capacitor并联电容器shunt capacitor电抗器Reactor母线Busbar输电线TransmissionLine发电⼚power plant断路器Breaker⼑闸(隔离开关)Isolator分接头tap电动机motor2状态参数有功active power⽆功reactive power电流current容量capacity电压voltage档位tap position有功损耗reactive loss⽆功损耗active loss空载损耗no-load loss铁损iron loss铜损copper loss空载电流no-load current阻抗impedance正序阻抗positive sequence impedance负序阻抗negative sequence impedance零序阻抗zero sequence impedance⽆功负载reactive load 或者QLoad有功负载: active load PLoad遥测YC(telemetering) 遥信YX励磁电流(转⼦电流)magnetizing current下限lower limit并列的apposable⾼压: high voltage低压low voltage中压middle voltage电⼒系统 power system发电机 generator励磁 excitation励磁器 excitor电压 voltage电流 current母线 bus变压器 transformer升压变压器 step-up transformer⾼压侧 high side输电系统 power transmission system输电线 transmission line固定串联电容补偿fixed series capacitor compensation 稳定 stability电压稳定 voltage stability功⾓稳定 angle stability暂态稳定 transient stability电⼚ power plant能量输送 power transfer交流 AC装机容量 installed capacity电⽹ power system落点 drop point开关站 switch station双回同杆并架 double-circuit lines on the same tower 变电站 transformer substation 补偿度 degree of compensation⾼抗 high voltage shunt reactor⽆功补偿 reactive power compensation故障 fault调节 regulation三相故障 three phase fault故障切除时间 fault clearing time极限切除时间 critical clearing time切机 generator triping ⾼顶值 high limited value强⾏励磁 reinforced excitation线路补偿器 LDC(line drop compensation)机端 generator terminal静态 static (state)动态 dynamic (state)单机⽆穷⼤系统 one machine - infinity bus system 机端电压控制 AVR 功⾓ power angle有功功率 active power⽆功功率 reactive power功率因数 power factor⽆功电流 reactive current下降特性 droop characteristics斜率 slope额定 rating变⽐ ratio参考值 reference value电压互感器 PT分接头 tap下降率 droop rate仿真分析 simulation analysis传递函数 transfer function框图 block diagram受端 receive-side裕度 margin同步 synchronization失去同步 loss of synchronization阻尼 damping摇摆 swing保护断路器 circuit breaker电阻resistance阻抗impedance电导conductance电纳susceptance导纳admittance电感inductance电容: capacitanceAGC Automatic Generation Control⾃动发电控制AMR Automatic Message Recording ⾃动抄表ASS Automatic Synchronized System ⾃动准同期装置ATS Automatic Transform System ⼚⽤电源快速切换装置AVR Automatic Voltage Regulator ⾃动电压调节器BCS Burner Control System 燃烧器控制系统BMS Burner Management System 燃烧器管理系统CCS Coordinated Control System 协调控制系统CRMS Control Room Management System 控制室管理系统CRT Cathode Ray Tube 阴极射线管DAS Data Acquisition System 数据采集与处理系统DCS Distributed Control System 分散控制系统DDC Direct Digital Control 直接数字控制系统DEH Digital Electronic Hydraulic Control 数字电液(调节系统) DPU Distributed Processing Unit 分布式处理单元EMS Energy Management System 能量管理系统ETS Emergency Trip System 汽轮机紧急跳闸系统EWS Engineering Working Station ⼯程师⼯作站FA Feeder Automation 馈线⾃动化FCS Field bus Control System 现场总线控制系统FSS Fuel Safety System 燃料安全系统FSSS Furnace Safeguard Supervisory System 炉膛安全监控系统GIS Gas Insulated Switchgear ⽓体绝缘开关设备GPS Global Position System 全球定位系统HCS Hierarchical Control System 分级控制系统LCD Liquid Crystal Display 液晶显⽰屏LCP Local Control Panel 就地控制柜MCS Modulating Control System 模拟量控制系统MEH Micro Electro Hydraulic Control System 给⽔泵汽轮机电液控制系统MIS Management Information System 管理信息系统NCS Net Control System ⽹络监控系统OIS Operator Interface Station 操作员接⼝站OMS Outage Management System 停电管理系统PID Proportion Integration Differentiation ⽐例积分微分PIO Process Output 过程输⼊输出通道PLC Programmable Logical Controller 可编程逻辑控制器PSS Power System Stabilizator 电⼒系统稳定器SCADA Supervisory Control And Data Acquisition 数据采集与监控系统SCC Supervisory Computer Control 监督控制系统SCS Sequence Control System 顺序(程序)控制系统SIS Supervisory Information System 监控信息系统 TDCS TDC Total Direct Digital Control 集散控制系统TSI Turbine Supervisory Instrumentation 汽轮机监测仪表UPS Uninterrupted Power Supply 不间断供电标准的机组数据显⽰ (Standard Measurement And Display Data)负载电流百分⽐显⽰ Percentage of Current load(%)单相/三相电压 Voltage by One/Three Phase (Volt.)每相电流 Current by Phase (AMP)千伏安 Apparent Power (KVA) 中线电流 Neutral Current (N Amp)功率因数 Power Factor (PF)频率 Frequency(HZ)千⽡ Active Power (KW)千阀 Reactive Power (KVAr)最⾼/低电压及电流 Max/Min. Current and Voltage输出千⽡/兆⽡⼩时 Output kWh/MWh运⾏转速 Running RPM机组运⾏正常 Normal Running超速故障停机 Overspeed Shutdowns低油压故障停机 Low Oil Pressure Shutdowns⾼⽔温故障停机 High Coolant Temperature Shutdowns起动失败停机 Fail to Start Shutdowns冷却⽔温度表 Coolant Temperature Gauge机油油压表 Oil Pressure Gauge机组运⾏⼩时表 Genset Running Hour Meter怠速-快速运⾏选择键 Idle Run – Normal Run Selector Switch运⾏-停机-摇控启动选择键 Local Run-Stop-Remote Starting Selector Switch 其它故障显⽰及输⼊ Other Common Fault Alarm Display and电⼒⾏波词汇⾏波travelling wave模糊神经⽹络fuzzy-neural network神经⽹络neural network模糊控制fuzzy control研究⽅向 research direction电⼒系统the electrical power system⼤容量发电机组large capacity generating set输电距离electricity transmission超⾼压输电线super voltage transmission power line投运commissioning⾏波保护Traveling wave protection⾃适应控制⽅法adaptive control process动作速度speed of action⾏波信号travelling wave signal输电线路故障transmission line malfunction⼦系统subsystem暂态⾏波transient state travelling wave偏移量side-play mount电压electric voltage附加系统add-ons system波形waveform⼯频power frequency延迟变换delayed transformation延迟时间delay time减法运算subtraction相减运算additive operation求和器summator模糊规则fuzzy rule参数值parameter values可靠动作action message⾪属函数membership function模糊规则fuzzy rule模糊推理fuzzy reasoning模糊推理矩阵fuzzy reasoning matrix样本集合 sample set感应定律law of electromagnetic induction 励磁 excitation 励磁器 magnetizing exciter励磁器 exciter恒定励磁器constant exciter励磁器激振器exciter励磁电流magnetizing current强⾏励磁 reinforced excitation励磁调节器 excitation regulator⽆功伏安 volt-ampere reactive。
《软件工程(双语)》参考教材:《Software engineering》9th Edition Ian Sommervile,Pearson Education, 机械工业出版社,2011参考书目:1、Software Engineering Theory and Practice(Second Edition影印版), Shari Lawrence Pfleeger,Pearson Education, 20012、《软件工程》第四版张海藩清华大学出版社,20073、软件工程,王忠群主编中国科学技术大学出版社 2009-11-14、Software engineering : a practitioner's approach / Roger S. Pressman. 6th ed. Pressman, Roger S. China Machine Press, 2008说明:斜体部分是可选讲授内容, 带星号的习题为可选。
Chapter 1(1) Introduction●Getting started with software engineering1.1Topics coveredA.1Professional software developmentWhat is meant by software engineeringA.2Software engineering ethicsA brief introduction to ethical issues that affect software engineering.1.2Importance of Software engineering●The economies of ALL developed nations are dependent on software.●More and more systems are software controlled●Expenditure on software represents a significant fraction of GNP (gross National product) inall developed countries.( GNP与GDP的关系是:GNP等于GDP加上本国投在国外的资本和劳务的收入再减去外国投在本国的资本和劳务的收入。
DiMo:Distributed Node Monitoring in WirelessSensor NetworksAndreas Meier†,Mehul Motani∗,Hu Siquan∗,and Simon Künzli‡†Computer Engineering and Networks Lab,ETH Zurich,Switzerland∗Electrical&Computer Engineering,National University of Singapore,Singapore‡Siemens Building T echnologies,Zug,SwitzerlandABSTRACTSafety-critical wireless sensor networks,such as a distributed fire-or burglar-alarm system,require that all sensor nodes are up and functional.If an event is triggered on a node, this information must be forwarded immediately to the sink, without setting up a route on demand or having tofind an alternate route in case of a node or link failure.Therefore, failures of nodes must be known at all times and in case of a detected failure,an immediate notification must be sent to the network operator.There is usually a bounded time limit,e.g.,five minutes,for the system to report network or node failure.This paper presents DiMo,a distributed and scalable solution for monitoring the nodes and the topology, along with a redundant topology for increased robustness. Compared to existing solutions,which traditionally assume a continuous data-flow from all nodes in the network,DiMo observes the nodes and the topology locally.DiMo only reports to the sink if a node is potentially failed,which greatly reduces the message overhead and energy consump-tion.DiMo timely reports failed nodes and minimizes the false-positive rate and energy consumption compared with other prominent solutions for node monitoring.Categories and Subject DescriptorsC.2.2[Network Protocols]:Wireless Sensor NetworkGeneral TermsAlgorithms,Design,Reliability,PerformanceKeywordsLow power,Node monitoring,Topology monitoring,WSN 1.INTRODUCTIONDriven by recent advances in low power platforms and protocols,wireless sensor networks are being deployed to-day to monitor the environment from wildlife habitats[1] Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on thefirst page.To copy otherwise,to republish,to post on servers or to redistribute to lists,requires prior specific permission and/or a fee.MSWiM’08,October27–31,2008,Vancouver,BC,Canada.Copyright2008ACM978-1-60558-235-1/08/10...$5.00.to mission-criticalfire-alarm systems[5].There are,how-ever,still some obstacles in the way for mass application of wireless sensor networks.One of the key challenges is the management of the wireless sensor network itself.With-out a practical management system,WSN maintenance will be very difficult for network administrators.Furthermore, without a solid management plan,WSNs are not likely to be accepted by industrial users.One of the key points in the management of a WSN is the health status monitoring of the network itself.Node failures should be captured by the system and reported to adminis-trators within a given delay constraint.Due to the resource constraints of WSN nodes,traditional network management protocols such as SNMP adopted by TCP/IP networks are not suitable for sensor networks.In this paper,we con-sider a light-weight network management approach tailored specifically for WSNs and their unique constraints. Currently,WSN deployments can be categorized by their application scenario:data-gathering applications and event-detection applications.For data-gathering systems,health status monitoring is quite straight forward.Monitoring in-formation can be forwarded to the sink by specific health status packets or embedded in the regular data packets.Ad-ministrators can usually diagnose the network with a helper program.NUCLEUS[6]is one of the network management systems for data-gathering application of WSN.Since event-detection deployments do not have regular traffic to send to the sink,the solutions for data-gathering deployments are not suitable.In this case,health status monitoring can be quite challenging and has not been discussed explicitly in the literature.In an event-detection WSN,there is no periodic data trans-fer,i.e.,nodes maintain radio silence until there is an event to report.While this is energy efficient,it does mean that there is no possibility for the sink to decide whether the net-work is still up and running(and waiting for an event to be detected)or if some nodes in the network have failed and are therefore silent.Furthermore,for certain military ap-plications or safety-critical systems,the specifications may include a hard time constraint for accomplishing the node health status monitoring task.In an event-detection WSN,the system maintains a net-work topology that allows for forwarding of data to a sink in the case of an event.Even though there is no regular data transfer in the network,the network should always be ready to forward a message to the sink immediately when-ever necessary.It is this urgency of data forwarding that makes it undesirable to set up a routing table and neighborlist after the event has been detected.The lack of regular data transfer in the network also leads to difficulty in de-tecting bad quality links,making it challenging to establish and maintain a stable robust network topology.While we have mentioned event-detection WSNs in gen-eral,we accentuate that the distributed node monitoring problem we are considering is inspired by a real-world ap-plication:a distributed indoor wireless alarm system which includes a sensor for detection of a specific alarm such as fire(as studied in[5]).To illustrate the reporting require-ments of such a system,we point out that regulatory speci-fications require afire to be reported to the control station within10seconds and a node failure to be reported within 5minutes[9].This highlights the importance of the node-monitoring problem.In this paper,we present a solution for distributed node monitoring called DiMo,which consists of two functions: (i)Network topology maintenance,introduced in Section2, and(ii)Node health status monitoring,introduced in Sec-tion3.We compare DiMo to existing state-of-the-art node monitoring solutions and evaluate DiMo via simulations in Section4.1.1Design GoalsDiMo is developed based on the following design goals:•In safety critical event monitoring systems,the statusof the nodes needs to be monitored continuously,allow-ing the detection and reporting of a failed node withina certain failure detection time T D,e.g.,T D=5min.•If a node is reported failed,a costly on-site inspectionis required.This makes it of paramount interest todecrease the false-positive rate,i.e.,wrongly assuminga node to have failed.•In the case of an event,the latency in forwarding theinformation to the sink is crucial,leaving no time toset up a route on demand.We require the system tomaintain a topology at all times.In order to be robustagainst possible link failures,the topology needs toprovide redundancy.•To increase efficiency and minimize energy consump-tion,the two tasks of topology maintenance(in par-ticular monitoring of the links)and node monitoringshould be combined.•Maximizing lifetime of the network does not necessar-ily translate to minimizing the average energy con-sumption in the network,but rather minimizing theenergy consumption of the node with the maximal loadin the network.In particular,the monitoring shouldnot significantly increase the load towards the sink.•We assume that the event detection WSN has no reg-ular data traffic,with possibly no messages for days,weeks or even months.Hence we do not attempt to op-timize routing or load balancing for regular data.Wealso note that approaches like estimating links’perfor-mance based on the ongoing dataflow are not possibleand do not take them into account.•Wireless communications in sensor networks(especially indoor deployments)is known for its erratic behav-ior[2,8],likely due to multi-path fading.We assumesuch an environment with unreliable and unpredictablecommunication links,and argue that message lossesmust be taken into account.1.2Related WorkNithya et al.discuss Sympathy in[3],a tool for detect-ing and debugging failures in pre-and post-deployment sen-sor networks,especially designed for data gathering appli-cations.The nodes send periodic heartbeats to the sink that combines this information with passively gathered data to detect failures.For the failure detection,the sink re-quires receiving at least one heartbeat from the node every so called sweep interval,i.e.,its lacking indicates a node fail-ure.Direct-Heartbeat performs poorly in practice without adaptation to wireless packet losses.To meet a desired false positive rate,the rate of heartbeats has to be increased also increasing the communication cost.NUCLEUS[6]follows a very similar approach to Sympathy,providing a manage-ment system to monitor the heath status of data-gathering applications.Rost et al.propose with Memento a failure detection sys-tem that also requires nodes to periodically send heartbeats to the so called observer node.Those heartbeats are not directly forwarded to the sink node,but are aggregated in form of a bitmask(i.e.,bitwise OR operation).The ob-server node is sweeping its bitmask every sweep interval and will forward the bitmask with the node missing during the next sweep interval if the node fails sending a heartbeat in between.Hence the information of the missing node is disseminated every sweep interval by one hop,eventually arriving at the sink.Memento is not making use of ac-knowledgements and proactively sends multiple heartbeats every sweep interval,whereas this number is estimated based on the link’s estimated worst-case performance and the tar-geted false positive rate.Hence Memento and Sympathy do both send several messages every sweep interval,most of them being redundant.In[5],Strasser et al.propose a ring based(hop count)gos-siping scheme that provides a latency bound for detecting failed nodes.The approach is based on a bitmask aggre-gation,beingfilled ring by ring based on a tight schedule requiring a global clock.Due to the tight schedule,retrans-missions are limited and contention/collisions likely,increas-ing the number of false positives.The approach is similar to Memento[4],i.e.,it does not scale,but provides latency bounds and uses the benefits of acknowledgements on the link layer.2.TOPOLOGY MAINTENANCEForwarding a detected event without any delay requires maintaining a redundant topology that is robust against link failures.The characteristics of such a redundant topology are discussed subsequently.The topology is based on so called relay nodes,a neighbor that can provide one or more routes towards the sink with a smaller cost metric than the node itself has.Loops are inherently ruled out if packets are always forwarded to relay nodes.For instance,in a simple tree topology,the parent is the relay node and the cost metric is the hop count.In order to provide redundancy,every node is connected with at least two relay nodes,and is called redundantly con-nected.Two neighboring nodes can be redundantly con-nected by being each others relay,although having the same cost metric,only if they are both connected to the sink. This exception allows the nodes neighboring the sink to be redundantly connected and avoids having a link to the sinkas a single point of failure.In a(redundantly)connected network,all deployed nodes are(redundantly)connected.A node’s level L represents the minimal hop count to the sink according to the level of its relay nodes;i.e.,the relay with the least hop count plus one.The level is infinity if the node is not connected.The maximal hop count H to the sink represents the longest path to the sink,i.e.,if at every hop the relay node with the highest maximal hop count is chosen.If the node is redundantly connected,the node’s H is the maximum hop count in the set of its relays plus one, if not,the maximal hop count is infinity.If and only if all nodes in the network have afinite maximal hop count,the network is redundantly connected.The topology management function aims to maintain a redundantly connected network whenever possible.This might not be possible for sparsely connected networks,where some nodes might only have one neighbor and therefore can-not be redundantly connected by definition.Sometimes it would be possible tofind alternative paths with a higher cost metric,which in turn would largely increase the overhead for topology maintenance(e.g.,for avoiding loops).For the cost metric,the tuple(L,H)is used.A node A has the smaller cost metric than node B ifL A<L B∨(L A=L B∧H A<H B).(1) During the operation of the network,DiMo continuously monitors the links(as described in Section3),which allows the detection of degrading links and allows triggering topol-ogy adaptation.Due to DiMo’s redundant structure,the node is still connected to the network,during this neighbor search,and hence in the case of an event,can forward the message without delay.3.MONITORING ALGORITHMThis section describes the main contribution of this paper, a distributed algorithm for topology,link and node monitor-ing.From the underlying MAC protocol,it is required that an acknowledged message transfer is supported.3.1AlgorithmA monitoring algorithm is required to detect failed nodes within a given failure detection time T D(e.g.,T D=5min).A node failure can occur for example due to hardware fail-ures,software errors or because a node runs out of energy. Furthermore,an operational node that gets disconnected from the network is also considered as failed.The monitoring is done by so called observer nodes that monitor whether the target node has checked in by sending a heartbeat within a certain monitoring time.If not,the ob-server sends a node missing message to the sink.The target node is monitored by one observer at any time.If there are multiple observer nodes available,they alternate amongst themselves.For instance,if there are three observers,each one observes the target node every third monitoring time. The observer node should not only check for the liveliness of the nodes,but also for the links that are being used for sending data packets to the sink in case of a detected event. These two tasks are combined by selecting the relay nodes as observers,greatly reducing the network load and maximiz-ing the network lifetime.In order to ensure that all nodes are up and running,every node is observed at all times. The specified failure detection time T D is an upper bound for the monitoring interval T M,i.e.,the interval within which the node has to send a heartbeat.Since failure detec-tion time is measured at the sink,the detection of a missing node at the relay needs to be forwarded,resulting in an ad-ditional maximal delay T L.Furthermore,the heartbeat can be delayed as well,either by message collisions or link fail-ures.Hence the node should send the heartbeat before the relay’s monitoring timer expires and leave room for retries and clock drift within the time window T R.So the monitor-ing interval has to be set toT M≤T D−T L−T R(2) and the node has to ensure that it is being monitored every T M by one of its observers.The schedule of reporting to an observer is only defined for the next monitoring time for each observer.Whenever the node checks in,the next monitoring time is announced with the same message.So for every heartbeat sent,the old monitoring timer at the observer can be cancelled and a new timer can be set according the new time.Whenever,a node is newly observed or not being observed by a particular observer,this is indicated to the sink.Hence the sink is always aware of which nodes are being observed in the network,and therefore always knows which nodes are up and running.This registration scheme at the sink is an optional feature of DiMo and depends on the user’s requirements.3.2Packet LossWireless communication always has to account for possi-ble message losses.Sudden changes in the link quality are always possible and even total link failures in the order of a few seconds are not uncommon[2].So the time T R for send-ing retries should be sufficiently long to cover such blanks. Though unlikely,it is possible that even after a duration of T R,the heartbeat could not have been successfully for-warded to the observer and thus was not acknowledged,in spite of multiple retries.The node has to assume that it will be reported miss-ing at the sink,despite the fact it is still up and running. Should the node be redundantly connected,a recovery mes-sage is sent to the sink via another relay announcing be-ing still alive.The sink receiving a recovery message and a node-missing message concerning the same node can neglect these messages as they cancel each other out.This recov-ery scheme is optional,but minimizes the false positives by orders of magnitudes as shown in Section4.3.3Topology ChangesIn the case of a new relay being announced from the topol-ogy management,a heartbeat is sent to the new relay,mark-ing it as an observer node.On the other hand,if a depre-cated relay is announced,this relay might still be acting as an observer,and the node has to check in as scheduled.How-ever,no new monitor time is announced with the heartbeat, which will release the deprecated relay of being an observer.3.4Queuing PolicyA monitoring buffer exclusively used for monitoring mes-sages is introduced,having the messages queued according to a priority level,in particular node-missing messagesfirst. Since the MAC protocol and routing engine usually have a queuing buffer also,it must be ensured that only one single monitoring message is being handled by the lower layers atthe time.Only if an ACK is received,the monitoring mes-sage can be removed from the queue(if a NACK is received, the message remains).DiMo only prioritizes between the different types of monitoring messages and does not require prioritized access to data traffic.4.EV ALUATIONIn literature,there are very few existing solutions for mon-itoring the health of the wireless sensor network deployment itself.DiMo is thefirst sensor network monitoring solution specifically designed for event detection applications.How-ever,the two prominent solutions of Sympathy[3]and Me-mento[4]for monitoring general WSNs can also be tailored for event gathering applications.We compare the three ap-proaches by looking at the rate at which they generate false positives,i.e.,wrongly inferring that a live node has failed. False positives tell us something about the monitoring pro-tocol since they normally result from packet losses during monitoring.It is crucial to prevent false positives since for every node that is reported missing,a costly on-site inspec-tion is required.DiMo uses the relay nodes for observation.Hence a pos-sible event message and the regular heartbeats both use the same path,except that the latter is a one hop message only. The false positive probability thus determines the reliability of forwarding an event.We point out that there are other performance metrics which might be of interest for evaluation.In addition to false positives,we have looked at latency,message overhead, and energy consumption.We present the evaluation of false positives below.4.1Analysis of False PositivesIn the following analysis,we assume r heartbeats in one sweep for Memento,whereas DiMo and Sympathy allow sending up to r−1retransmissions in the case of unac-knowledged messages.To compare the performance of the false positive rate,we assume the same sweep interval for three protocols which means that Memento’s and Sympa-thy’s sweep interval is equal to DiMo’s monitoring interval. In the analysis we assume all three protocols having the same packet-loss probability p l for each hop.For Sympathy,a false positive for a node occurs when the heartbeat from the node does not arrive at the sink in a sweep interval,assuming r−1retries on every hop.So a node will generate false positive with a possibility(1−(1−p r l)d)n,where d is the hop count to the sink and n the numbers of heartbeats per sweep.In Memento,the bitmask representing all nodes assumes them failed by default after the bitmap is reset at the beginning of each sweep interval. If a node doesn’t report to its parent successfully,i.e.,if all the r heartbeats are lost in a sweep interval,a false positive will occur with a probability of p l r.In DiMo the node is reported missing if it fails to check in at the observer having a probability of p l r.In this case,a recovery message is triggered.Consider the case that the recovery message is not kept in the monitoring queue like the node-missing messages, but dropped after r attempts,the false positive rate results in p l r(1−(1−p l r)d).Table1illustrates the false positive rates for the three protocols ranging the packet reception rate(PRR)between 80%and95%.For this example the observed node is in afive-hop distance(d=5)from the sink and a commonPRR80%85%90%95% Sympathy(n=1) 3.93e-2 1.68e-2 4.99e-3 6.25e-4 Sympathy(n=2) 1.55e-3 2.81e-4 2.50e-5 3.91e-7 Memento8.00e-3 3.38e-3 1.00e-3 1.25e-4 DiMo 3.15e-4 5.66e-5 4.99e-67.81e-8Table1:False positive rates for a node with hop count5and3transmissions under different packet success rates.number of r=3attempts for forwarding a message is as-sumed.Sympathy clearly suffers from a high packet loss, but its performance can be increased greatly sending two heartbeats every sweep interval(n=2).This however dou-bles the message load in the network,which is especially substantial as the messages are not aggregated,resulting in a largely increased load and energy consumption for nodes next to the paring DiMo with Memento,we ob-serve the paramount impact of the redundant relay on the false positive rate.DiMo offers a mechanism here that is not supported in Sympathy or Memento as it allows sending up to r−1retries for the observer and redundant relay.Due to this redundancy,the message can also be forwarded in the case of a total blackout of one link,a feature both Memento and Sympathy are lacking.4.2SimulationFor evaluation purposes we have implemented DiMo in Castalia1.3,a state of the art WSN simulator based on the OMNet++platform.Castalia allows evaluating DiMo with a realistic wireless channel(based on the empiricalfindings of Zuniga et al.[8])and radio model but also captures effects like the nodes’clock drift.Packet collisions are calculated based on the signal to interference ratio(SIR)and the radio model features transition times between the radio’s states (e.g.,sending after a carrier sense will be delayed).Speck-MAC[7],a packet based version of B-MAC,with acknowl-edgements and a low-power listening interval of100ms is used on the link layer.The characteristics of the Chipcon CC2420are used to model the radio.The simulations are performed for a network containing80 nodes,arranged in a grid with a small Gaussian distributed displacement,representing an event detection system where nodes are usually not randomly deployed but rather evenly spread over the observed area.500different topologies were analyzed.The topology management results in a redun-dantly connected network with up to5levels L and a max-imum hop count H of6to8.A false positive is triggered if the node fails to check in, which is primarily due to packet errors and losses on the wireless channel.In order to understand false positives,we set the available link’s packet reception rate(PRR)to0.8, allowing us to see the effects of the retransmission scheme. Furthermore,thisfixed PRR also allows a comparison with the results of the previous section’s analysis and is shown in Figure1(a).The plot shows on the one hand side the monitoring based on a tree structure that is comparable to the performance of Memento,i.e.,without DiMo’s possibil-ity of sending a recovery message using an alternate relay. On the other hand side,the plot shows the false positive rate of DiMo.The plot clearly shows the advantage of DiMo’s redundancy,yet allowing sending twice as many heartbeats than the tree approach.This might not seem necessarily fair atfirst;however,in a real deployment it is always possible(a)Varying number of retries;PRR =0.8.(b)Varying link quality.Figure 1:False positives:DiMo achieves the targeted false positive rate of 1e-7,also representing the reliability for successfully forwarding an event.that a link fails completely,allowing DiMo to still forward the heartbeat.The simulation and the analysis show a slight offset in the performance,which is explained by a simulation artifact of the SpeckMAC implementation that occurs when the receiver’s wake-up time coincides with the start time of a packet.This rare case allows receiving not only one but two packets out of the stream,which artificially increases the link quality by about three percent.The nodes are observed every T M =4min,resulting in being monitored 1.3e5times a year.A false positive rate of 1e-6would result in having a particular node being wrongly reported failed every 7.7years.Therefore,for a 77-node net-work,a false positive rate of 1e-7would result in one false alarm a year,being the targeted false-positive threshold for the monitoring system.DiMo achieves this rate by setting the numbers of retries for both the heartbeat and the recov-ery message to four.Hence the guard time T R for sending the retries need to be set sufficiently long to accommodate up to ten messages and back-offtimes.The impact of the link quality on DiMo’s performance is shown in Figure 1(b).The tree topology shows a similar performance than DiMo,if the same number of messages is sent.However,it does not show the benefit in the case of a sudden link failure,allowing DiMo to recover immedi-ately.Additionally,the surprising fact that false positives are not going to zero for perfect link quality is explained by collisions.This is also the reason why DiMo’s curve for two retries flattens for higher link qualities.Hence,leaving room for retries is as important as choosing good quality links.5.CONCLUSIONIn this paper,we presented DiMo,a distributed algorithm for node and topology monitoring,especially designed for use with event-triggered wireless sensor networks.As a de-tailed comparative study with two other well-known moni-toring algorithm shows,DiMo is the only one to reach the design target of having a maximum error reporting delay of 5minutes while keeping the false positive rate and the energy consumption competitive.The proposed algorithm can easily be implemented and also be enhanced with a topology management mechanism to provide a robust mechanism for WSNs.This enables its use in the area of safety-critical wireless sensor networks.AcknowledgmentThe work presented in this paper was supported by CTI grant number 8222.1and the National Competence Center in Research on Mobile Information and Communication Sys-tems (NCCR-MICS),a center supported by the Swiss Na-tional Science Foundation under grant number 5005-67322.This work was also supported in part by phase II of the Embedded and Hybrid System program (EHS-II)funded by the Agency for Science,Technology and Research (A*STAR)under grant 052-118-0054(NUS WBS:R-263-000-376-305).The authors thank Matthias Woehrle for revising a draft version of this paper.6.REFERENCES[1] A.Mainwaring et al.Wireless sensor networks for habitatmonitoring.In 1st ACM Int’l Workshop on Wireless Sensor Networks and Application (WSNA 2002),2002.[2] A.Meier,T.Rein,et al.Coping with unreliable channels:Efficient link estimation for low-power wireless sensor networks.In Proc.5th Int’l worked Sensing Systems (INSS 2008),2008.[3]N.Ramanathan,K.Chang,et al.Sympathy for the sensornetwork debugger.In Proc.3rd ACM Conf.Embedded Networked Sensor Systems (SenSys 2005),2005.[4]S.Rost and H.Balakrishnan.Memento:A health monitoringsystem for wireless sensor networks.In Proc.3rd IEEE Communications Society Conf.Sensor,Mesh and Ad Hoc Communications and Networks (IEEE SECON 2006),2006.[5]M.Strasser,A.Meier,et al.Dwarf:Delay-aware robustforwarding for energy-constrained wireless sensor networks.In Proceedings of the 3rd IEEE Int’l Conference onDistributed Computing in Sensor Systems (DCOSS 2007),2007.[6]G.Tolle and D.Culler.Design of an application-cooperativemanagement system for wireless sensor networks.In Proc.2nd European Workshop on Sensor Networks (EWSN 2005),2005.[7]K.-J.Wong et al.Speckmac:low-power decentralised MACprotocols for low data rate transmissions in specknets.In Proc.2nd Int’l workshop on Multi-hop ad hoc networks:from theory to reality (REALMAN ’06),2006.[8]M.Zuniga and B.Krishnamachari.Analyzing thetransitional region in low power wireless links.In IEEE SECON 2004,2004.[9]Fire detection and fire alarm systems –Part 25:Componentsusing radio links.European Norm (EN)54-25:2008-06,2008.。
网络安全英文缩写Network security is a critical aspect of ensuring the confidentiality, integrity, and availability of network resources and communication. It involves implementing various measures to protect networks and the data they transmit and store from unauthorized access, misuse, and attacks. In the field of network security, there are numerous acronyms that are commonly used to refer to specific technologies, standards, protocols, and concepts. Understanding these acronyms is important for network administrators and security professionals as they navigate the complex landscape of network security. In this article, we will explore some of the most commonly used acronyms in network security.1. VPN - Virtual Private Network: A technology that allows users to create a secure connection to a private network over a public network, such as the internet. VPNs are commonly used to provide remote secure access to corporate networks.2. IDS - Intrusion Detection System: A software or hardware system that monitors network traffic for suspicious activities or patterns that may indicate an attack. IDSs can detect and alert administrators about potential threats in real-time.3. IPS - Intrusion Prevention System: A system that operates in conjunction with an IDS to not only detect intrusions but also take immediate action to prevent them. IPSs can block or terminate suspicious connections or traffic to protect the network.4. DDoS - Distributed Denial-of-Service: A type of attack where multiple compromised computers (called zombies) are used toflood a target system or network with traffic, overwhelming its resources and causing it to become inaccessible to legitimate users.5. SSL/TLS - Secure Sockets Layer/Transport Layer Security: Protocols that provide secure communication over a computer network. SSL/TLS ensures that the data transmitted between a server and a client is encrypted and cannot be intercepted or tampered with.6. WPA/WPA2 - Wi-Fi Protected Access: A security protocol used to protect wireless computer networks. WPA and WPA2 provide strong encryption and authentication mechanisms to prevent unauthorized access to Wi-Fi networks.7. SIEM - Security Information and Event Management: A technology that combines security information management (SIM) and security event management (SEM) to provide real-time analysis of security alerts generated by network devices and systems.8. ACL - Access Control List: A set of rules defined on a network device, such as a router or a firewall, to control traffic flow. ACLs can be used to permit or deny specific types of traffic based on source and destination IP addresses, ports, and other criteria.9. PKI - Public Key Infrastructure: A system of cryptographic techniques, including public-key encryption, digital signatures, and certificate authorities, used to secure communications and verify the authenticity of digital documents and entities.10. IDS/IPS - Intrusion Detection and Prevention System: A combined system that integrates the functions of an IDS and an IPS into a single solution. IDS/IPS systems provide comprehensive network security by detecting and preventing intrusions in real-time.These acronyms represent just a fraction of the extensive network security vocabulary. Understanding and incorporating these technologies, protocols, and concepts into network security strategies is crucial for safeguarding sensitive information and maintaining the overall security of networks and systems.。
替代Supersedes 页码Page No.1/页数生效日期Effective Date姓名/部门Name / Department 签名/日期Signature / Date起草PREP ARED BY 邹国新/设备工程部Zou Guoxing / / Engineering审核REVIEWED BY 曹敏/设备工程部Cao Min/ Engineering批准APPROVED BY 冯吉/质量总监Feng Ji / Quality Director分发至Distributed to:质量保证部、设备工程部Quality Assurance Department, Engineering Department替代Supersedes 页码Page No.2/页数生效日期Effective Date1目的PURPOSE此规程建立了确保现场仪器和标准仪器正确校验的方针,此规程也建立了深圳信立泰坪山制药厂(信立泰)的校验涉及的评估,分级,和校验周期的划分依据此文件执行。
This procedure establishes the policies that ensure the proper calibration of on-site instrument and Standards instrument. This procedure also establishes guidelines for the calibration system of Shenzhen Salubris Co., Ltd...Dayawan Plant (salubris).2范围SCOPE此规程明确说明了信立泰测量仪器采用的校验规则,并涵盖了本公司实施的以及为本公司实施的校验(评估,分级,和校验周期)的活动。
This procedure specifies the calibration rules for measuring instrument at Salubris, and it also involves calibration practices performed by and for Salubris3参考REFERENCEEE-SOPXXX《计量管理规程》EE-SOP-XXX,《仪器编号规程》TS-SOP-XXX,《影响评估管理规程》EE-SOP-XXX /NF08,《仪器关键性评估表》4职责RESPONSIBILITIES4.1仪器仪表的使用部门指定人员和计量工程师按此规程要求对公司计量器具进行分级管理.4.2质量控制部监督本文的执行5定义DEFINITION5.1校验(校准)-在规定的条件下,将被测试仪器与一个更高精度的标准器进行比较,以发现、推断、调整、确认和记录被比较的现场仪器的精度。
A Distributed Safety-Critical System for Real-Time Train ControlAnup K. Ghosh, Vikram Rana,and Barry W. JohnsonCenter for Semicustom Integrated Systems Department of Electrical EngineeringUniversity of VirginiaCharlottesville, Virginia 22903Joseph A. Profeta, III Union Switch and Signal, IncorporatedA Member of the Ansaldo Group1000 Technology DrivePittsburgh, Pennsylvania 15237tolerant applications, hardware redundancy is essential. In addition, the real-time requirements for the different train control applications vary from tens of milliseconds for car-borne functions to full seconds for wayside functions.Current microprocessor-based train control systems employ different systems at the wayside and on-board trains that are usually incompatible. In addition, ad hoc methodologies to safety-critical design have been imple-mented in these systems to ensure safety and fault-tolerant operation, often without regard to analyzable safety or real-istic assumptions on the nature of faults in digital hardware. Section 2 summarizes current systems used in train control and their shortcomings.A single open-systems architecture that supports both wayside and carborne train control functions using com-mercial off-the-shelf (COTS) components is presented in Section 3. The time-triggered executive used in this archi-tecture is discussed in Section 4. A concurrent verification technique that enables calculable safety in a distributed system is described in Section 5. Results from modeling and simulating the architecture are presented in Section 6. The experimental prototype of the system architecture that executes a wayside train control application using the con-current verification algorithm is described in Section 7 along with experimental results. The overall contributions of the paper are summarized in Section 8.2. BACKGROUNDThe railroad industry has been actively replacing elec-tromechanical relay-driven safety interlocking systems with microprocessor-controlled interlocking systems. Recent advances in train control applications have sophis-ticated processing requirements that demand fail-safe and sometimes fault-tolerant system architectures.A safe failure occurs when the failure of a component in a processing system is detected and the effect of the fail-ure emerges as a safe-side operation [1]. In the railway application, the safe-side failures are defined for the out-puts of the controller. A safe-side failure for a switch is to leave it in the locked position. The safe-side failure of a sig-nal is to set it to red, so that a train will stop before entering a block. In carborne control applications, most failures can be made safe by stopping the train immediately. Unlike planes that are controlled by computers, stopping the train is a safe failure state. Safety is the probability that the train controller is working correctly or has failed in a safe state. Reliability is the probability that the train controller is operating correctly. In order to have a highly reliable sys-tem, a fault-tolerant controller with hardware or software redundancy is necessary. A system designed strictly for safety, on the other hand, requires only a single processor architecture with concurrent error detection mechanisms that switch outputs into a safe state upon error detection.Simplex processing systems for wayside applications are described in the literature [2] [3]. In the MICROLOK system [2], the safety of the controller is dependent upon the diagnostic checks that are executed. One major draw-back inherent in a diagnostic approach to safety is that the level of safety achieved by diagnostics is not easily quanti-fied. Second, the amount of processing overhead necessary for the diagnostics can often be greater than the amount used for executing the application. This performance factor will ultimately limit its application. The VPI system [3] uses a coded-processor approach to checking the safety-critical interlocking equations of the wayside application. Under the assumption that errors are equally likely, the safety of the system can be quantitatively determined. Aside from this unrealistic assumption, another major drawback of this system is that it lacks a modular architec-ture to allow for expansion into a distributed system. Finally, no provision for fault-tolerance is designed in the architecture, which limits its application to the wayside problem.Two multiprocessing architectures have also been developed for train control [1] [5] Both use hardware rep-lication for fault tolerance. Two drawbacks are inherent in hardware replication. First, the software is assumed to be correct. An error in the software will not be revealed by majority voting in hardware. Second, the expense of a hardware redundant strategy to safety-critical operation is many times the expense of a single processor solution.The dependable computing system described in this paper employs information redundancy and a concurrent verification technique to assure safety globally in a distrib-uted system. This approach reduces the hardware overhead associated with majority voting to achieve safety and per-mits quantifiable measures of safety. Furthermore, the modularity of the distributed system enables fault tolerant operation for applications that require high reliability and availability. The open-systems architecture is designed to maximize the use of commercial off the shelf (COTS) com-ponents to reduce developmental costs.3. SYSTEM ARCHITECTUREThe architecture for the distributed system which exe-cutes a safety-critical train control application is depicted in Figure 1. The basic building blocks of this architecture are the processors, input/output modules, and the network interface unit (NIU), which are co-located in backplane card cages. The parallel bus backplane interconnects pro-cessors with local input/output modules. Processors com-municate with remote processors and I/O over the high-speed serial network via the network interface unit. The input modules are responsible for sensing data from the field such as the state of a switch or presence of a train. The processors are responsible for executing the train control algorithm. Multiple processors can be placed in a single card cage to execute multiprocessing applications. Proces-sors may also be arranged in voting clusters to be used in for fault-tolerant operation.The Fiber Distributed Data Interface (FDDI) network standard is used for inter-node communication. The latency and response time for data transmissions is bounded to sup-port real-time applications.The FDDI network protocol guarantees media access for all nodes connected to the net-work. In addition, the protocol enforces a bounded response time for each node connected to the network to ensure hang-ups do not disrupt operation.4. I/O CYCLE CONSIDERATIONSA software executive which resides on a controlling processor has been designed for this safety critical system [9]. The software executive implements a time-triggered paradigm for the system. System events such as writing outputs, writing input polls, and control equation evalua-tion are activated by the system executive at fixed periodi-cal intervals of time. An input/output cycle is the basic unit of processing in the system, and the executive is designed around it. The executive is a single tasking kernal in which tasks are executed singly through procedural calls. Upon completing a task, control is returned to the executive ker-nel. The executive also runs non-critical routines until the end of a frame, at which time a context switch takes place, and the I/O cycle is repeated in the next frame [10].The frame-based timing specification used by the executive is typical in the avionics industry and elsewhere [11]. Tasks may need to execute every frame, every other frame, or at other frequencies. The system cycle represent-ing this scheduling approach for the train control applica-tion appears in Figure 2. Task P1 represents writing outputs and polling inputs at the beginning of each frame. In order to support deterministic updating of actuator devices, out-puts are written at the beginning of each frame. Input cards are also polled at the beginning of each frame. In this para-digm, the actuators and sensors are updated and sensed, respectively, at known periodic intervals. Task P2 repre-sents the time it takes for inputs to be read into the memory of the processor card. The processor begins executing the control equations at the beginning of P3. If all inputs have not arrived by this time, an error will be signaled, and safe shutdown will follow.Non-critical routines (P4) run in vari-able-length subframes determined by the amount of idle time in a frame and are the only processes that can be pre-empted or suspended. These routines include other non-critical functions such as passenger information, train scheduling, data processing, and diagnostic functions for maintenance. It should be noted that the diagram is only descriptive, not specific, and the number of frames and the number of tasks per frame vary based on the train control application.In order to support determinism of system behavior, the system uses a static scheduling algorithm. Static sched-uling is simple to implement and its deterministic schedul-ing allows hard deadlines to be set and enforced through watchdog time-outs. One drawback of static scheduling is that it is not very flexible in permitting new tasks to be included without re-design. However, the safety achieved from deterministic scheduling outweigh the benefits of flexibility in scheduling.5. GLOBAL SAFETY ASSURANCEThe primary dependability requirement in the wayside and carborne train control application is safety. In this sec-tion, we present a concept for global safety assurance in a distributed system to be used in safety-critical applications. This concept is currently implemented in an experimental test-bed prototype which is described briefly in Section 7.5.1Goals of Global Safety AssuranceA code-based approach to concurrent error detection and control algorithm verification is employed in the sys-tem to implement global safety assurance. The goal of this method is to provide a quantifiable level of safety assur-ance over a distributed system. Unlike highly reliable sys-tems, safety-critical systems have the option of failing-safe, which in the case of this particular application means stopping the train. As a result, a desired approach to safety assurance could take advantage of a simplex controller without resorting to N-modular redundancy. A major dis-advantage of many N-modular redundant approaches, is that identical software is executed on all redundant com-puters. If the software is used for executing safety critical functions, or if it could introduce unsafe errors into the out-put of the system, then the software must be formally veri-fied or assumed correct. Leveson [12] has concluded that itis next to impossible to uncover all bugs in complex soft-ware. The safety assurance approach presented here uses a single control algorithm verification methodology to detect errors arising from both hardware and software.Since the set of all faults that can occur in hardware and software is considered infinite, we check the manifes-tation of these faults as errors in the information domain [7]. The basic assumption of this approach is that all faults that can lead to system failure will manifest themselves as errors in the data that the computer processes. As a result, the system must be exercised frequently to minimize fault latency times and the data that is processed by the computer must be checked for errors before outputs are set.5.2Concurrent Verification of the Control AlgorithmMany error detection or voting systems implement bus-level voting mechanisms to vote on data every machine cycle [13]. This methodology requires tight syn-chronization of hardware and intimate knowledge of the hardware platform. V oting systems also assume that the software executing on redundant machines is correct and that design errors in processors that may cause simulta-neous errors do not exist.In order to detect errors arising out of hardware and software for a generic computing platform, the problem of error detection is abstracted to the control application level. In the method presented here, the error checking mecha-nisms are not concerned with the specifics of the hardware platform, but rather with the control algorithm being exe-cuted Figure 3 depicts a distributed system composed of three main elements: inputs, a hardware/software (HW/ SW) computing platform, and outputs. An abstraction of the control algorithm is projected out from the hardware/ software computing platform in the lower box. A subset of the inputs into the system will consist of the input operands into the control algorithm. A subset of the outputs from the computing platform will also be output operands from the control algorithm.The control algorithm can be described in the para-digm of a finite state machine (FSM). The outputs of the state machine which correspond to the outputs of the con-trol algorithm are a function of the input operands and internal state variables. The next states of the FSM are a function of the input operands and the current state of the FSM. For the wayside interlocking application, the control algorithm functions are Boolean operators. In most car-borne applications, the functions are arithmetic. The con-trol algorithm itself is a predetermined sequence of operations on the predetermined set of input operands and state variables. The a priori knowledge of which inputs and state variables are to be used in executing the pre-deter-mined equations permits concurrent verification of algo-rithm execution. The safety assurance method is concerned only with the set of operands, next states, and outputs of the control algorithm. The set of all inputs, outputs and opera-tions in the computing platform is not of concern, unless errors in this superset manifest themselves as errors in the control algorithm subset.5.3Checking in Safety Assurance RegionsA global approach to safety must consider errors that can arise in all parts of the system. These components include input modules, communication channels, processor units, and output modules. Each component in a distributed system is considered a safety assurance region. All errors that arise in a safety assurance region must be detected by error detection mechanisms and prevented from propagat-ing into other regions. The safety assurance region is anal-ogous to fault containment regions used in some highly reliable systems [13].Using a code-based approach for error detection allows an upper bound on the probability for undetected errors to be calculated. This calculation is necessary for determining the coverage of all errors and ultimately the safety of the system. Input data to the control algorithm are read by input sensors at the input cards. The input sensor themselves must be vital according to railway standards. Once sensed, the field data is encoded with an identity and time stamp in a cyclic code. The identity and time stamp are used by the concurrent verification algorithm to detect referencing and timing errors. A cyclic code is used in order to assure good random and burst error detection capa-bility. Once encoded, this data can be checked before leav-ing the input module safety assurance region. Checking must be performed at the interfaces of the safety assurance regions.The communication media of the architecture is also a safety assurance region. Data from input cards and proces-sors are encoded in a cyclic code before being transmitted over the network. Data is checked at the interface to the destination upon arrival. Loss of data is detected by incom-plete data sets and late data error conditions are detected watchdog time-outs. The output cards need only to verify that the output data codeword is uncorrupted, the time stamp is correct for the current cycle, and the identity of the codeword corresponds to the output channel.Representing the control application as a finite state machine allows every state that is calculated by the algo-rithm to be checked concurrently. The concurrent verifica-tion algorithm knows a priori the identities of the inputs, the sequence of operations, and the identities of the state variables and outputs for the control algorithm. With this knowledge and the constraint that the processor execute the control algorithm in a predetermined sequential fashion, the control algorithm can verify that the correct input oper-ands for the current cycle were used and uncorrupted, that the correct operation was executed, and the correct output identity was encoded with the output operand. In addition, the concurrent verification algorithm checker must be able to verify that the operation executed correctly. The algo-rithm checker is able to verify that the primary outputs and the next states were calculated correctly by diversely checking that the resulting output is a correct functional map from the inputs and operation type. Other train control applications such as input filtering, output filtering, and command feedback can be represented and checked simi-larly.The concurrent verification algorithm outlined for each of the safety assurance regions provides global safety assurance by detecting errors in hardware and software. Once an error is detected, a fail-safe shutdown is required. The safety assurance method is designed to check a single processor unit executing the control application. The checking algorithm can be implemented in a small number of semi-custom integrated circuit chips which will pas-sively monitor the processor-memory bus to capture the necessary operands. Alternatively, the algorithm can be programmed on another processor card which will execute the concurrent verification algorithm on data received from the primary processor card. In these cases, the probability of an error occurring simultaneously in both the primary processor and the checker card that results in an unsafe fail-ure is analyzable through near-coincident fault analysis based on assumed failure rates for both cards.to the overhead associated with delievering a packet for 256 I/O channels. Therefore, the performance of the I/O subsystem for remote calls will jump on packet boundaries. In this experiment, however, all packets are sent in pairs. As a result, the performance of the I/O subsystem jumps on pairs of packets which can hold enough data for 512 I/O channels. Therefore the I/O response time is approximately constant during each interval of 512 I/O channels and jumps at the next interval.The main conclusion that can be drawn from this graph is that the I/O response time is much worse for remote transactions over the FDDI network than it is for local transactions over the VME backplane. A performance anal-ysis of the I/O transactions determined that the primary bottleneck in transmitting packets remotely is in the soft-ware driver for the FDDI network [16]. In contrast, local transactions on the VME backplane are performed through simple memory-mapped reads and writes to the local I/O devices.A hardware fault-injection module for the prototype has been developed and is currently being integrated with the executive processor. The fault-injection unit will inject errors into the 68040 CPU concurrently with execution of the control application. The goal of fault injection is to experimentally determine the effectiveness of the safety assurance methodology in the presence of errors.8. SUMMARY AND CONCLUSIONSThis paper presented an architecture and safety assur-ance methodology to be used in a distributed control sys-tem executing a safety-critical application. The architecture is designed to support train control applica-tions that require fail-safe and fault-tolerant operation. The architecture and safety assurance methodology defined in this paper overcomes many of the current limitations in existing train control systems. The architecture provides flexibility in terms of expanding the system by adding COTS processors and I/O devices. The safety assurance methodology provides calculable safety for a distributed system controlled by a single processor. This method uses a deterministic timing paradigm for execution and a control algorithm verification method to detect errors arising from hardware and software concurrently. The safety assurance methodology allows significant savings in both redundant hardware costs and software verification.Results from simulating indicate the impact on net-work latency and response time for larger configurations of the system. The system architecture and safety assurance method is currently implemented in an experimental test-bed prototype. The experimental results showed the impact on the I/O response time due to the FDDI driver and pack-etization overhead. Future work will focus on simulated and experimental fault injection for dependability analysis.9. ACKNOWLEDGMENTSWe would like to acknowledge the contributions of Douglass Lamb to Section 4 on I/O Cycle considerations and Paul Perrone to Section 5 on global safety assurance methodology.10. REFERENCES[1] A. Hachiga, “The Concepts and Technologies of Dependable andReal-time Computer Systems for Shinkansen Train Con-trol,”Dependable Computing and Fault-Tolerant Systems,V ol.7, pp. 225- 252.[2] D. Disk., “A Unique Application of a Microprocessor to VitalControls,” Prod. of the Int’l Conf. on Railway Safety Con-trol and Automation, 1984, pp 97-104.[3] D. Rutherford, “Fail-Safe Microprocessor Interlocking withSafety Assurance Logic: Establishing a Vital Benchmark,”Proc. of the Int’l Conf. on Railway Safety Control and Auto-mation, 1984, pp 1-5.[4] A. Cribbens, “The Solid State Interlocking System,”Proc. of theInt’l Conf. on Railway Safety Control and Automation,Lon-don, Sept. 1984, pp. 24-29.[5]K. Akita, T. Watanabe, H.Nakamura, and I. Okumura, “Comput-erized Interlocking System for Railway Signaling Control:SMILE”,IEEE Trans.on Industry Applications, V ol. 1A-21,No.4, May/June 1985, pp. 826-834.[6]M. El Koursi and A. Stuparu, ”Safety Microprocessors in GuidedGround Transport,” Transportation Technologies Applica-tions,pp. 428-432.[7] B.W. Johnson,Design and Analysis of Fault Tolerant Digital Sys-tems,Addison Wesley Publishing Company, Reading MA,1989.[8]G. Vernazza and R. Zunino, “A distributed intelligence method-ology for railway traffic control,”IEEE Trans. on VehicularTechnology,V ol. 39, No. 3, August 1990, pp. 263-270 [9] D.T. Lamb. and B.W. Johnson, “Next Generation ArchitectureExecutive Specification,” Technical Report 930801.0, Cen-ter for Semicustom Integrated Systems, University of Vir-ginia, November, 1993.[10]M.H. Klein and T. Ralya.An Analysis of Input/Output Paradigmsfor Real-Time Systems. Tech. Report CMU/SEI-90-TR-19,ESD-90-TR-220, July 1990.[11] B.L. Di Vito, R.W. Butler, and J.L. Caldwell.Formal Design andVerification of a Reliable Computing Platform for Real-Time Control. Phase 1 Results. NASA Tech. Mem. 102716.Oct. 1990.[12]N.G. Leveson, “Software Safety: Why, what, and how.”ACMComp. Surveys, June 1986[13]J. Lala, R.E. Harper, and L. Alger, “A design approach forultrareliable real-time systems,”Computer,IEEE ComputerSociety, V olume 24, May 1991, pp. 12-22.[14]S. Kumar, R.H. Klenke, J.H. Aylor, B.W. Johnson, R.D. Will-iams, and R. Waxman, “ADEPT: A Unified System LevelModeling Design Environment,”Proceedings of the 1stAnnual RASSP Conference, Arlington, V A, August 15-18,1994, pp. 114-123.[15]M.H. Klein, J.P. Lehoczky, an R.Rajkumar, “Rate-MonotonicAnalysis for Real-Time Industrial Computing,”Computer,IEEE Computer Society, V ol.27, No.l 1, January 1994, pp.24-33.[16]V.S. Rana, “Application of FDDI in a Safety-Critical System,”Master’s Thesis, University of Virginia, 1995.。