
(数据库原理与应用)实验报告
实验名称并发事务管理及控制
实验地点60#504实验时间
1.实验目的:
理解和体会数据库事务管理的内容,掌握设计并发事务的基本方法。
2.实验内容:
按教材P251-252的要求完成各种事务管理和并发操作的实验。
3.实验要求:
按教材P251-252实验10的要求完成实验。
4.实验准备:
加强认识数据库管理系统的事务管理功能,认真阅读实验要求和实验前的实例;
理解脏读等的概念,分析各种情况的发生
5.实验过程(含代码、实验过程、遇到的问题和解决方法等):
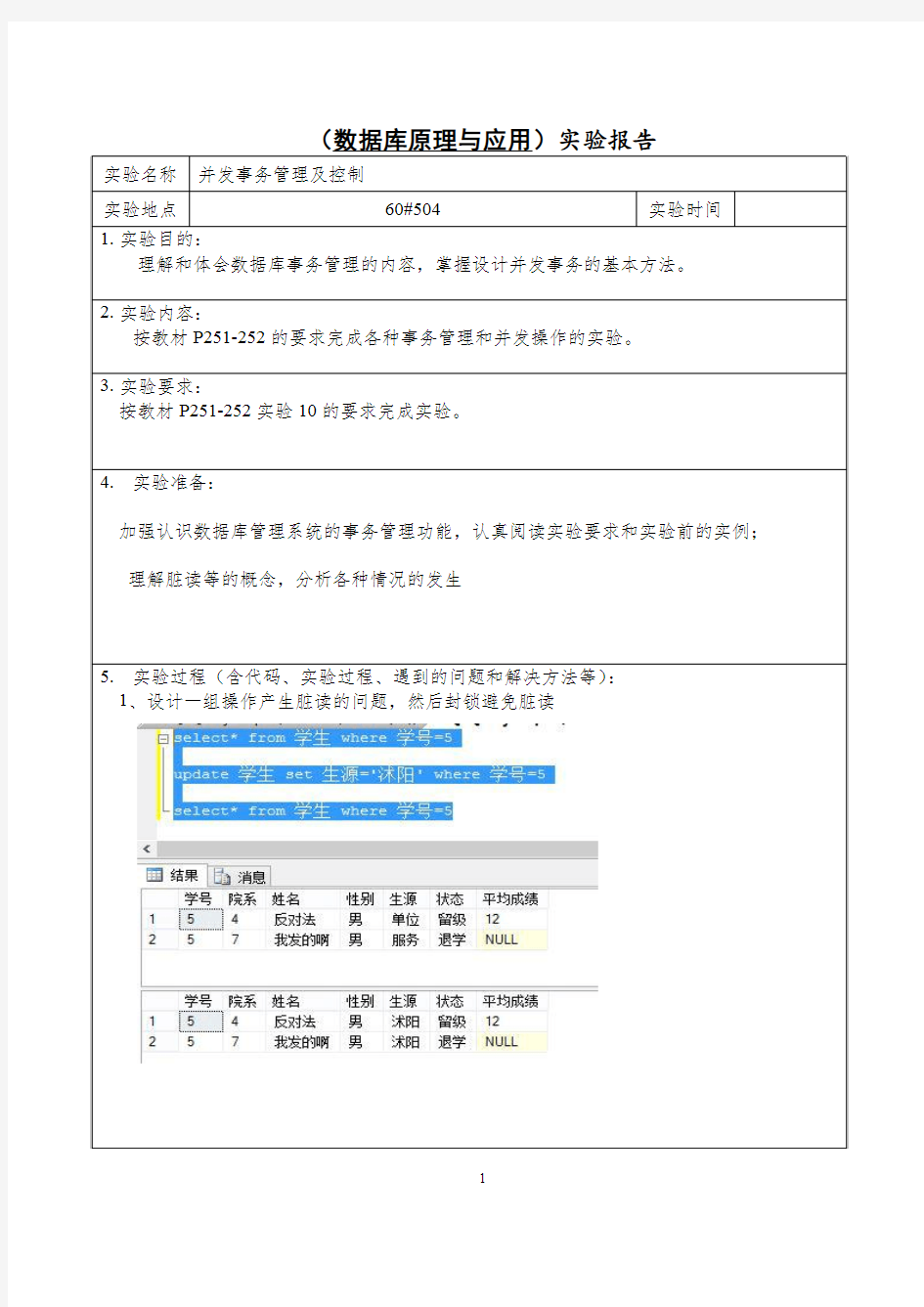
1、设计一组操作产生脏读的问题,然后封锁避免脏读
2、设计一组操作产生不可重复读的问题,然后封锁避免
3、设计一组操作产生丢失更新的问题,然后封锁避免
4、设计一组操作产生死锁的操作,再利用相同顺序和一次封锁来有效避免、
5、设计一个相对完整的应用,使用隔离界别来进行并发控制,然后不同用户运行相同程序,操作相同的数据观察并发控制的效果
6.实验总结:
数据库是共享资源,通常有许多个事务同时在运行。当多个事务并发地存取数据库时就会产生同时读取和/或修改同一数据的情况。若对并发操作不加控制就可能会存取和存储不正确的数据,破坏数据库的一致性。
封锁就是事务T在对某个数据对象例如表、记录等操作之前,先向系统发出请求,对其加锁。加锁后事务T就对该数据对象有了一定的控制,在事务T释放它的锁之前,其他的事务不能更新此数据对象。封锁是实现并发控制的一个非常重要的技术
7.教师评语
说明:
1.实验名称、实验目的、实验内容、实验要求由教师确定,实验前由教师事先填好,然后作为实验报告模版供学生使用;
2.实验准备由学生在实验或上机之前填写,教师应该在实验前检查;
3.实验过程由学生记录实验的过程,包括操作过程、遇到哪些问题以及如何解决等;
4.实验总结由学生在实验后填写,总结本次实验的收获、未解决的问题以及体会和建议等;
5.源程序、代码、具体语句等,若表格空间不足时可作为附录另外附页。
实验报告 ( 2016-2017年度第二学期) 名称:《现代控制理论基础》 题目:状态空间模型分析 院系:控制科学与工程学院 班级: ___ 学号: __ 学生姓名: ______ 指导教师: _______ 成绩: 日期: 2017年 4月 15日
线控实验报告 一、实验目的: l.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验内容 1 第一题:已知某系统的传递函数为G (s) S23S2 求解下列问题: (1)用 matlab 表示系统传递函数 num=[1]; den=[1 3 2]; sys=tf(num,den); sys1=zpk([],[-1 -2],1); 结果: sys = 1 ------------- s^2 + 3 s + 2 sys1 = 1 ----------- (s+1) (s+2) (2)求该系统状态空间表达式: [A1,B1,C1,D1]=tf2ss(num,den); A = -3-2 10 B = 1 C = 0 1
第二题:已知某系统的状态空间表达式为: 321 A ,B,C 01:10 求解下列问题: (1)求该系统的传递函数矩阵: (2)该系统的能观性和能空性: (3)求该系统的对角标准型: (4)求该系统能控标准型: (5)求该系统能观标准型: (6)求该系统的单位阶跃状态响应以及零输入响应:解题过程: 程序: A=[-3 -2;1 0];B=[1 0]';C=[0 1];D=0; [num,den]=ss2tf(A,B,C,D); co=ctrb(A,B); t1=rank(co); ob=obsv(A,C); t2=rank(ob); [At,Bt,Ct,Dt,T]=canon(A,B,C,D, 'modal' ); [Ac,Bc,Cc,Dc,Tc]=canon(A,B,C,D, 'companion' ); Ao=Ac'; Bo=Cc'; Co=Bc'; 结果: (1) num = 0 01 den = 1 32 (2)能控判别矩阵为: co = 1-3 0 1 能控判别矩阵的秩为: t1 = 2 故系统能控。 (3)能观判别矩阵为: ob = 0 1
《管理学》实验报告 报告内容 ㈠实验目的 通过对管理学实际的模拟实验,使学生了解决策的重要性,更重要的是要学生在真正的团队中怎样树立自己的重要性和协作性,真正运用管理的职能,即计划、组织、领导、控制这四种基本职能。综合运用于对实际问题的分析,初步具有解决一般管理问题的能力,培养学生的综合管理素质。 ㈡实验要求 每个组确立个组长,领导全队,组织工作,要实验学生通过此次实验,培养学生初步养成管理思维模式的作用。使学生正确理解管理的概念,掌握管理的普遍规律、基本原理和一般方法,并能综合运用于对实际问题的分析,初步具有解决一般管理问题的能力,培养学生的综合管理素质 ㈢实验内容及步骤 三轮主要实验: ①认识同伴,互相自我介绍并记住各自的基本信息,并共同做一些数学规律题来培养团队的感情和默契.,也使团队成员大致了解到团队人员的大致能力。 ②通过敲,捏两个动作来进行小组比赛,看哪个团队又快又准的猜出数字,通过裁判给小组第一个人出题,然后第一个人通过仅有的两个动作来表达具体要求的数字,依次传下去,看最后个人猜中第一个人表达的数字没有,猜中即得分。这样的内容使成员们事先要沟通好敲,捏他们所表达的不同意思,使他们互相沟通,协助,交流,制定方案。为下面的最重要的环节打好基础。 ③通过前两轮的实验,使大家都初步认识到小组成员每人的实力和管理能力,为这一轮做好基础。这一轮通过出扑克牌红和黑,一共九次出牌,两队为一个对手,如果双方都出红,则各加3分;如果一红一黑,即红扣6分,黑加6分;如果全黑,双方各减去3分。在第三次可以每组派代表进行交流一分钟制定双方双赢的战术。 ㈣实验结果与分析 ①在第一轮中,通过自我介绍和做一些题,我发现我们这组虽说大部分是女的,但是各自的能力都不错,在团队中表达能力和沟通能力都很好。大家都能开放性沟通,支持团队成员的想法,尊重成员,公正的评估与奖赏,可预测性的行为以及才能的亲自示范来建立互信。 ②在第二轮中,大家事先都沟通好战术,敲即代表什么,捏代表什么,小数点怎么表示,都是我们大家都认可和交流出来的结果,怎么样才能又快又准的掌握双方的意思。开始比赛时候,第一轮大家被裁判出的数字难倒了,这个题目是0.这使得第一个开头的人不知道怎么表达了,因为事先我们没有商量这个0该怎么表达,所以一头雾水,导致第一次失败。第二次是个简单的整数,这次我们大家都能沉着的迎战了,并很快得出了正确答案。第三次中,是个小数点,本来前两个成员都理解到并表达出来了的,由于第三个人的疏忽,敲错了,使得最后结果错误。 ③第三次最重要的环节中,一共有九次机会,前三次只能靠直觉和自己对对手心理和环境的揣测来出牌。三次之后可以出一个代表进行交流一分钟,看怎么样能达到双方双赢的局面,沟通的短暂时间中,需要的是代表的表达能力,沟通能力等管理职能。这轮游戏中,最开始几乎都是分数差不多,你进我退,你退我进。在最后一轮中,我们出了黑牌导致对方红牌扣了六分,而自己团队加了六分,排名领先,但是我认为这样对不起对手,因为他们和我们即是对手,又是合作伙伴,不应该让他们陷入最低分。 ㈤在这三次中,我充分了解到一个团队在制定方案的时候要多角度多元化,全面的认识,不能太单一,因为谁也不知道真正比赛中是什么刁钻的数字。并且团队中的每个人都是重要人物,一个人出错,几
力学实验报告 篇一:工程力学实验(全) 工程力学实验学生姓名:学号:专业班级:南昌大学工程力学实验中心目录实验一金属材料的拉伸及弹性模量测定试验实验二金属材料的压缩试验实验三复合材料拉伸实验实验四金属扭转破坏实验、剪切弹性模量测定实验五电阻应变片的粘贴技术及测试桥路变换实验实验六弯曲正应力电测实验实验七叠(组)合梁弯曲的应力分析实验实验八弯扭组合变形的主应力测定实验九偏心拉伸实验实验十偏心压缩实验实验十二金属轴件的高低周拉、扭疲劳演示实验实验十三冲击实验实验十四压杆稳定实验实验十五组合压杆的稳定性分析实验实验十六光弹性实验实验十七单转子动力学实验实验十八单自由度系统固有频率和阻尼比实验 1 2 6 9 12 16 19 23 32 37 41 45 47 49 53 59 62 65实验一金属材料的拉伸及弹性模量测定试验实验时间:设备编号:温度:湿度:一、实验目的二、实验设备和仪器三、实验数据及处理引伸仪标距l =mm 实验前 2低碳钢弹性模量测定 E? 实验后 ?F?l = (?l)?A 屈服载荷和强度极限载荷 3载荷―变形曲线(F―Δl曲线)及结果四、问题讨论(1)比较低碳钢与铸铁在拉伸时的力学性能;(2)试从不同的断口特征说明金属的两种基本破坏形式。 4篇二:工程力学实验报告工程力学实验报告自动化12级实验班 1-1 金属材料的拉伸实验一、试验目的 1.测定低碳钢(Q235 钢)的强度性能指标:上屈服强度ReH,下屈服强度ReL和抗拉强度Rm 。 2.测定低碳钢(Q235 钢)的塑性性能指标:断后伸长率A和断面收缩率Z。 3.测定铸铁的抗拉强度Rm。 4.观察、比较低碳钢(Q235 钢)和铸铁的拉伸过程及破坏现象,并比较其机械性能。 5.学习试验机的使用方法。二、设备和仪器 1.试验机(见附录)。 2.电子引伸计。 3.游标卡尺。三、试样 (a) (b) 图1-1 试样拉伸实验是材料力学性能实验中最基本的实验。为使实验结果可以相互比较,必须对试样、试验机及实验方法做出明确具体的规定。我国国标GB/T228-2002 “金属材料室温拉伸试验方法”中规定对金属拉伸试样通常采用圆形和板状两种试样,如图(1-1)所示。它们均由夹持、过渡和平行三部分组成。夹持部分应适合于试验机夹头的夹持。过渡部分的圆孤应与平行部分光滑地联接,以保证试样
华北电力大学 实验报告| | 实验名称状态空间模型分析 课程名称现代控制理论 | | 专业班级:自动化1201 学生姓名:马铭远 学号:2 成绩: 指导教师:刘鑫屏实验日期:4月25日
状态空间模型分析 一、实验目的 1.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验仪器与软件 1. MATLAB7.6 环境 三、实验内容 1 、模型转换 图 1、模型转换示意图及所用命令 传递函数一般形式: MATLAB 表示为: G=tf(num,den),,其中 num,den 分别是上式中分子,分母系数矩阵。 零极点形式: MATLAB 表示为:G=zpk(Z,P,K) ,其中 Z,P ,K 分别表示上式中的零点矩阵,极点矩阵和增益。 传递函数向状态空间转换:[A,B,C,D] = TF2SS(NUM,DEN); 状态空间转换向传递函数:[NUM,DEN] = SS2TF(A,B,C,D,iu)---iu 表示对系统的第 iu 个输入量求传递函数;对单输入 iu 为 1。
例1:已知系统的传递函数为G(S)= 2 2 3 24 11611 s s s s s ++ +++ ,利用matlab将传递函数 和状态空间相互转换。 解:1.传递函数转换为状态空间模型: NUM=[1 2 4];DEN=[1 11 6 11]; [A,B,C,D] = tf2ss(NUM,DEN) 2.状态空间模型转换为传递函数: A=[-11 -6 -11;1 0 0;0 1 0];B=[1;0;0];C=[1 2 4];D=[0];iu=1; [NUM,DEN] = ss2tf(A,B,C,D,iu); G=tf(NUM,DEN) 2 、状态方程状态解和输出解 单位阶跃输入作用下的状态响应: G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x). 零输入响应 [y,t,x]=initial(G,x0)其中,x0 为状态初值。
管理学时间管理实验报告 ---验证计划得作用姓名:王志通 班级:国贸1501 学号:1508080108 一周个人时间使用情况统计表
时间使用情况、时间节省及可不做时间统计情况 对个人时间使用情况得分析与反思 通过对我一周时间使用情况得统计与分析,可不做与可减少得时间29小时10分钟,必要得睡眠、用餐、清理、交通时间为83小时10分钟,一周时间为168小时,所以我一周得有效时间浪费率=29小时10分钟/(168小时-83小时10分钟)=34、4%。这一数据表明我得有效时间浪费率很高,没有很好地利用好这有限得时间,很有必要进行自我时间管理,规划好自己得时间,降低有效时间浪费率,提高时间利用效率。 计划得制定 针对上述问题,根据自己得实际情况,运用所学得计划管理知识与时间管理方法,制定了自己一周计划: 1、周一至周五上午或下午没有课时,不要呆在宿舍内,去图书馆或自习教室瞧书写作 业 2、上午第一节没课时,不要睡懒觉 3、晚上下课后,充分利用好这段时间,不要用玩手机浪费了,可适当增加锻炼时间 4、晚上要按时睡觉,11:30之前睡觉,7:20起床,确保8小时睡眠时间
5、要利用好周六与周日两天,不要在床上度过 通过制定计划,统计计划后时间运用情况如下: 验证与反思 实施计划后,统计与分析时间使用情况,可以算出计划后有效时间浪费率为3、9%,与计划前得34、4%相比,有效时间浪费率大大降低,这说明我得时间计划取得了一定得作用。通过自我时间管理,制定并实施时间计划,对我们把握时间,利用好有限得时间,有很大得帮助,但在计
划得制定与实施方面,有许多问题需要我们注意。 在制定计划时,对于一些事情,时间要有一定得幅度,避免时间过于仓促,或者时间过多得情况,避免不必要得时间浪费。计划不就是一成不变得,它需要根据我们得实际情况加以修正优化,达到最有效地利用好时间,追求效用最大化。在制定计划时,不要忽略许多小块时间,要充分利用好这些时间,她们加起来可就是一个大数目,不容忽视,需加以好好利用,对降低我们得有效时间浪费率有很大作用。 没有执行得计划毫无意义,计划制定后一定要执行,这样才能发挥计划得作用。所以在我们计划执行得过程中,需要注意以下问题:我们一定要严格按照计划来执行,绝不能半途而废,无功而返。这只会造成前功尽弃,计划没有丝毫作用。计划了就一定要坚持地走下去,只有这样,才能发挥出计划得作用。如果我们在执行计划得过程中,发现计划有误或根本无法实施,要及时更改计划并执行。 通过时间管理实验,制定自己得时间计划,对比时间计划前后得结果,我们知道计划得作用就是巨大得。计划就是一个确定目标与评估实现目标最佳方式得过程。计划指明了我们得方向,减少变化所带来得影响,使浪费与冗余降到最少。计划还可以减少重叠性与浪费性得活动,对提高我们得办事效率有很大得帮助。计划就是一座桥梁,连接起现在与将来要达到得目标。
现代控制理论实验报告
实验一系统能控性与能观性分析 一、实验目的 1.理解系统的能控和可观性。 二、实验设备 1.THBCC-1型信号与系统·控制理论及计算机控制技术实验平台; 三、实验容 二阶系统能控性和能观性的分析 四、实验原理 系统的能控性是指输入信号u对各状态变量x的控制能力,如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间把系统所有的状态引向状态空间的坐标原点,则称系统是能控的。 对于图21-1所示的电路系统,设iL和uc分别为系统的两个状态变量,如果电桥中 则输入电压ur能控制iL和uc状态变量的变化,此时,状态是能控的。反之,当 时,电桥中的A点和B点的电位始终相等,因而uc不受输入ur的控制,ur只能改变iL的大小,故系统不能控。 系统的能观性是指由系统的输出量确定所有初始状态的能力,如果在有限的时间根据系统的输出能唯一地确定系统的初始状态,则称系统能观。为了说明图21-1所示电路的能观性,分别列出电桥不平衡和平衡时的状态空间表达式: 平衡时:
由式(2)可知,状态变量iL和uc没有耦合关系,外施信号u只能控制iL的变化,不会改变uc的大小,所以uc不能控。基于输出是uc,而uc与iL无关连,即输出uc中不含有iL的信息,因此对uc的检测不能确定iL。反之式(1)中iL与uc有耦合关系,即ur的改变将同时控制iL和uc的大小。由于iL与uc的耦合关系,因而输出uc的检测,能得到iL 的信息,即根据uc的观测能确定iL(ω) 五、实验步骤 1.用2号导线将该单元中的一端接到阶跃信号发生器中输出2上,另一端接到地上。将阶跃信号发生器选择负输出。 2.将短路帽接到2K处,调节RP2,将Uab和Ucd的数据填在下面的表格中。然后将阶跃信号发生器选择正输出使调节RP1,记录Uab和Ucd。此时为非能控系统,Uab和Ucd没有关系(Ucd始终为0)。 3.将短路帽分别接到1K、3K处,重复上面的实验。 六、实验结果 表20-1Uab与Ucd的关系 Uab Ucd
南阳理工学院《管理学》实训报告 院(部):经济管理学院 专业:财务管理 班级:15财管出国班 学号: 1521245248 姓名:熊芷怡 指导教师:赵雪 2016年6月15日
实训报告 实验项目:模拟公司系列实训(分散进行) 姓名:熊芷怡学号: 1521245248 班级:出国班实验地点: 9214 实验课程名称:管理学 指导教师:赵雪成绩: 一、实训目的: 通过实训,培养学生们的具体管理技能。按照培养中高级管理岗位的综合管理技能的总目标分解,主要培养下述能力: ⑴培养现代企业运作与管理的理念与运用现代管理理论的能力; ⑵培养创新精神与创新管理能力; ⑶培养观察环境,配置资源,制定计划的能力; ⑷培养分析界定问题,科学决策的能力; ⑸培养分析组织结构,协调职权关系,制定组织规范的能力; ⑹培养招聘、应聘,管理与考核人的能力; ⑺培养树立权威,有效指挥的能力; ⑻培养有效激励,调动人的积极性的能力; ⑼培养协调关系和与他人沟通的能力; ⑽培养对工作有效控制的能力; ⑾培养搜集与处理信息的能力,特别是利用网上资源的能力; ⑿总结与评价的能力。 二、实训内容 1、模拟公司系列实训之一——组建模拟公司 2、模拟公司系列实训之二——活动策划 3、模拟公司系列实训之三——建立组织结构5 4、模拟公司系列实训之四——角色扮演:招聘
三、实训结果 1.模拟公司系列实训之一组建模拟公司 (1)收集资料,确定目标 课上小组成员集中讨论。确定公司名称和经营范围。并查询资料确定公司大体章程和市场定位及其他问题。 (2)文案策划,注意事项 文案分别从公司简介,经营范围,市场定位,针对人群,员工人数,公司发展,重大荣誉等方面进行书写。小组成员每人策划不同内容。然后集中整理和规划。内容如下:EF公司主要承接大型游戏的转播和战队直播,利用门票和周边化产业盈利。主要消费人群是各个年龄阶层对战游戏爱好者。 (3)上台演讲及成果 在小组中找到思维敏捷。口齿伶俐的成员进行台上演讲。给大家解惑。讲解文案中不够清楚和对本公司情况不懂得细节。 台上演讲完成之后,把文案交给老师。小组集中讨论总结失误和疏忽。把我们小组的独到之处同样总结下来方便进行下一次实训。由于是第一次进行文案策划。出现了很多错误和表达不够清晰的地方。大家在听别的组演讲时。吸取了很多经验。了解了很多正确表达方式。获得了一定的演讲能力和技巧。在文案策划中很多地方都没有提及。比如公司历史。公司地址。公司规模还有企业文化。下一次有待加强。 2.模拟公司系列实训之二活动策划 (1)收集材料,确定目标 五一劳动节来临之际。我们公司将要举行重大活动来欢度佳节。众人展开讨论选择举行何种活动。讨论活动内容,活动规模,活动时间,活动场地,前期宣传,赞助商,广告策划,活动注意事项,活动安全,活动细节,人员分工 (2)文案策划和注意事项 将众人讨论的内容记录下来。因为我总结和概括能力较好。所以记录内容交由我进行总结和润色。在大体内容完成讨论之后集中讨论注意事项和安全措施及面对紧急情况的处理措施(比如遇到火灾或者下暴雨,现场有人受伤。紧急的应对措施。)还有活动预算。(场地费,人工费,广告费,代言费,出场费)将预算完
工程力学实验报告 自动化12级实验班 §1-1 金属材料的拉伸实验 一、试验目的 1.测定低碳钢(Q235 钢)的强度性能指标:上屈服强度R eH,下屈服强度R eL和抗拉强度R m 。 2.测定低碳钢(Q235 钢)的塑性性能指标:断后伸长率A和断面收缩率Z。 3.测定铸铁的抗拉强度R m。 4.观察、比较低碳钢(Q235 钢)和铸铁的拉伸过程及破坏现象,并比较其机械性能。 5.学习试验机的使用方法。 二、设备和仪器 1.试验机(见附录)。 2.电子引伸计。 3.游标卡尺。 三、试样 (a) (b) 图1-1 试样 拉伸实验是材料力学性能实验中最基本的实验。为使实验结果可以相互比较,必须对试
样、试验机及实验方法做出明确具体的规定。我国国标GB/T228-2002 “金属材料 室温拉伸试验方法”中规定对金属拉伸试样通常采用圆形和板状两种试样,如图(1-1)所示。它们均由夹持、过渡和平行三部分组成。夹持部分应适合于试验机夹头的夹持。过渡部分的圆孤应与平行部分光滑地联接,以保证试样破坏时断口在平行部分。平行部分中测量伸长用的长度称为标距。受力前的标距称为原始标距,记作l 0,通常在其两端划细线标志。 国标GB/T228-2002中,对试样形状、尺寸、公差和表面粗糙度均有明确规定。 四、实验原理 低碳钢(Q235 钢)拉伸实验(图解方法) 将试样安装在试验机的上下夹头中,引伸计装卡在试样上,启动试验机对试样加载,试验机将自动绘制出载荷位移曲线(F-ΔL 曲线),如图(1-2)。观察试样的受力、变形直至破坏的全过程,可以看到低碳钢拉伸过程中的四个阶段(弹性阶段、屈服阶段、强化阶段和局部变形阶段)。 屈服阶段反映在F-ΔL 曲线图上为一水平波动线。上屈服力eH F 是试样发生屈服而载荷首次下降前的最大载荷。下屈服力eL F 是试样在屈服期间去除初始瞬时效应(载荷第一次急剧下降)后波动最低点所对应的载荷。最大力R m 是试样在屈服阶段之后所能承受的最大载荷。相应的强度指标由以下公式计算: 上屈服强度R eH :0 S F R eH eH = (1-1) 下屈服强度R eL :0 S F R eL eL = (1-2 ) 抗拉强度R m : 0 S F R m m = (1-3) 在强化阶段任一时刻卸载、再加载,可以观察加载、御载规律和冷作硬化现象。 在F m 以前,变形是均匀的。从F m 开始,产生局部伸长和颈缩,由于颈缩,使颈缩处截面减小,致使载荷随之下降,最后断裂。断口呈杯锥形。
(一)信贷客户拖欠贷款的可能性的预测 一、Logistic模型构建 结果1 可以从上述表中看出的信息主要有: 第一个表,共有850条记录,有效记录700条,缺失700条;第二个表,因变量default的取值为“Yes”(拖欠贷款)编码为1,“No”(正常)的编码为0;第三个表,提供了虚拟变量的代码编号和分布情况:参照水平为“研究生”,虚拟变量为“是否高中以下”、“是否高中”、“是否大学”、“是否大专”。 二、模型检验 结果2 从Logistic分析初始阶段(step 0)的混淆矩阵及方程系数中可以看出以下信息:
(1)517人实际未拖欠贷款且模型预测正确,正确率为100% (2)183实际人拖欠了贷款而模型预测为0,正确率为0%,模型总的预测正确率为73.9%。 结果3: 通过该结果可以了解初始阶段未进入方程的各解释变量的情况。 在下一阶段教育程度若进入方程,那么ed(2)、ed(3)、ed(4)和incom所对应的score检验统计量的观测值分别为1.910,3.579,2.382,伴随概率依次为0.167,0.059,0.123,3.526,均大于显著性水平0.05。模型选择了Eenter进入方式后,本不应该进入的变量全部进入方程中,模型的预测效果因此而收到了影响。 结果4: 当模型采用Enter策略时,回归方程的显著性检验结果如下: 对数似然比卡方值为254.801,伴随概率为0.000,小于显著性水平0.05,拒绝零假设,认为系数不全为0,解释变量的全体与LogitP之间的线性关系显著,因此采用该模型合适。 结果5:
可以从该表中得到回归方程拟合优度方面的指标,-2倍的似然函数值549.564较大,拟合优度不佳,同时Nagelkerke R^2=0.447 也说明拟合优度不佳。 结果6: 上述表显示了H-L检验的结果: 似然比卡方值为9.187,伴随概率为0.327,大于显著性水平0.05,接受零假设,认为实际值的分布与预测值的分布没有显著差异,可以从第二个表的到认证。 结果7:
河南工业大学 现代控制理论实验报告姓名:朱建勇 班级:自动1306 学号:201323020601
现代控制理论 实验报告 专业: 自动化 班级: 自动1306 姓名: 朱建勇 学号: 201323020601 成绩评定: 一、实验题目: 线性系统状态空间表达式的建立以及线性变换 二、实验目的 1. 掌握线性定常系统的状态空间表达式。学会在MATLAB 中建立状态空间模型的方法。 2. 掌握传递函数与状态空间表达式之间相互转换的方法。学会用MATLAB 实现不同模型之 间的相互转换。 3. 熟悉系统的连接。学会用MATLAB 确定整个系统的状态空间表达式和传递函数。 4. 掌握状态空间表达式的相似变换。掌握将状态空间表达式转换为对角标准型、约当标准 型、能控标准型和能观测标准型的方法。学会用MATLAB 进行线性变换。 三、实验仪器 个人笔记本电脑 Matlab R2014a 软件 四、实验内容 1. 已知系统的传递函数 (a) ) 3()1(4)(2++=s s s s G
(b) 3486)(22++++=s s s s s G
(c) 6 1161)(232+++++=z z z z z z G (1)建立系统的TF 或ZPK 模型。 (2)将给定传递函数用函数ss( )转换为状态空间表达式。再将得到的状态空间表达式用函 数tf( )转换为传递函数,并与原传递函数进行比较。 (3)将给定传递函数用函数jordants( )转换为对角标准型或约当标准型。再将得到的对角 标准型或约当标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。 (4)将给定传递函数用函数ctrlts( )转换为能控标准型和能观测标准型。再将得到的能控标 准型和能观测标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
郑州航空工业管理学院实验报告 2012 -2013 学年第2 学期 课程名称:________档案管理学_________ 实验名称:______档案网站评价_________ 小组成员:鲁付强刘恒巍刘亚 吴超文孔德靖尹承丞
实验项目:天津市档案网站评价 实验室:信息科学学院实验室 指导教师:祝洁实验日期:2013年4月25日 一、实验目的: 从第三方中立、客观的角度出发,通过全面、客观的数据获取、调查测评和分析评价,掌握天津市档案网站建设的情况,并基于此总结出档案网站建设模式。 项目宗旨是:准确、客观、全面、科学、建设性。 具体目的包括: 1. 客观评价天津市档案馆网站的建设水平,反映其建设成绩,找出有待改进的地方,归纳其优越之处,便于借鉴和学习。 2. 提高档案学专业学生对档案网站建设的掌握程度,引导我专业学生网站建设正确发展,少走弯路。 3. 了解档案信息电子化公共服务领域的发展与利用,提高公共服务水平。 二、实验环境及工具: (一)实验环境 本次实验环境地点限定于宿舍和学校图书馆,本实验小组人员共6名利用上课时间的空缺将实验的课题工作带到每一个可以用到的实践中去实验工具分别通过电脑、手机、书籍、网络存储的大量信息库环境以及天津市档案网站https://www.doczj.com/doc/16625975.html, 。 (二)研究方法 总体上,本项目采用了用户评价法,同时吸纳相关公共档案馆的研究力量,立足于档案用户的第三方立场,对天津市档案网站加以测评。 在评价指标体系构建阶段,文献研究法和专家调查法是主要的研究方法。在数据采集阶段,课题组采用了人工网页浏览的采集方法,并结合电话咨询、邮件测试、参与论坛、网站安全检测等实验方法。在数据归纳与分析阶段,采用定性与定量相结合的方法,为天津市网站的各项指标确定得分。并
试验目的: 1. 测定低碳钢(塑性材料)的弹性摸量E;屈服极限σs 等机械性能。 2.测定灰铸铁(脆性材料)的强度极限σb 3.了解塑性材料和脆性材料压缩时的力学性能。 材料拉伸与压缩实验指导书 低碳钢拉伸试验 拉伸试验的意义: 单向拉伸试验是在常温下以缓慢均匀的速度对专门制备的试件施加轴向载荷,在试件加载过程中观测载荷与变形的关系,从而决定材料有关力学性能。通过拉伸试验可以测定材料在单向拉应力作用下的弹性模量及屈服强度、抗拉强度、延伸率、截面收缩率等指标。其试验方法简单且易于得到较可靠的试验数据,所以是研究材料力学性能最基本、应用最广泛的试验。 操作步骤: 1.试验设备:WDW-3050电子万能试验机 2.试件准备:用游标卡尺测量试件试验段长度l0和截面直径d0,并作记录。 3.打开试验机主机及计算机等相关设备。 4.试件安装(详见WDW3050电子万能试验机使用与操作三.拉伸试件的安装)。 5.引伸计安装(用于测量E, 详见WDW3050电子万能试验机使用与操作四.引伸计安装)。 6.测量参数的设定: 7.再认真检查一遍试件安装等试验准备工作。 8.负荷清零,轴向变形清零,位移清零。 9.开始进行试验,点击试验开始。 10.根据提示摘除引伸计。 11.进入强化阶段以后,进行冷作硬化试验,按主机控制面板停止,再按▼,先卸载到10kN,再加载,按▲,接下来计算机控制,一直到试件断裂(此过程中计算机一直工作,注意观察负荷位移曲线所显示的冷作硬化现象.). 12.断裂以后记录力峰值。 13.点击试验结束(不要点击停止)。
14.材料刚度特征值中的弹性模量E的测定 试验结束后,在试验程序界面选定本试验的试验编号,并选择应力─应变曲线。在曲线上较均匀地选择若干点,记录各点的值,分别为及 (如i =0,1,2,3,4),并计算出相应的 计算E i的平均值,得到该材料的弹性模量E的值。 15.材料强度特征值屈服极限和强度极限的测定 试验结束后,在试验程序界面选定本试验的试验编号,并选择负荷─位移曲线,找到的曲线屈服阶段的下屈服点,即为屈服载荷F s, 找到的曲线上最大载荷值,即为极限载荷P b. 计算屈服极限:;计算强度极限:; 16.材料的塑性特征值延伸率及截面收缩率的测定 试件拉断后,取下试件,沿断裂面拼合,用游标卡尺测定试验段长度,和颈缩断裂处截面直径。 计算材料延伸率 计算截面收缩率 低碳钢拉伸试验报告 试验目的: 1. 掌握电子万能试验机操作; 2. 理解塑性材料拉伸时的力学性能; 3. 观察低碳钢拉伸时的变形特点; 4. 观察低碳钢材料的冷作硬化现象; 5. 测定低碳钢材料弹性模量E ; 6. 测定材料屈服极限和强度极限; 7. 测定材料伸长率δ和截面收缩率Ψ 试验设备:
现代控制理论课程总结 学习心得 从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。现代控制论是用状态空间方法表示,概念抽象,不易掌握。对于《现代控制理论》这门课程,在刚拿到课本的时候,没上张老师的课之前,咋一看,会认为开课的内容会是上学期学的控制理论基础的累赘或者简单的重复,更甚至我还以为是线性代数的复现呢!根本没有和现代控制论联系到一起。但后面随着老师讲课的风格的深入浅出,循循善诱,发现和自己想象的恰恰相反,张老师以她特有的讲课风格,精心准备的ppt 课件,向我们展示了现代控制理论发展过程,以及该掌握内容的方方面面,个人觉得,我们不仅掌握了现代控制理论的理论知识,更重要的是学会了掌握这门知识的严谨的逻辑思维和科学的学习方法,对以后学习其他知识及在工作上的需要大有裨益,总之学习了这门课让我受益匪浅。 由于我们学习这门课的课时不是很多,并结合我们学生学习的需求及所要掌握的课程深入程度,张老师根据我们教学安排需要,我们这学期学习的内容主要有:1.绪论;2.控制系统的状态表达式;3.控制系统状态表达式的解;4.线性系统的能空性和能观性;5.线性定常系统的综合。而状态变量和状态空间表达式、状态转移矩阵、系统的能控性与能观性以及线性定常系统的综合是本门课程的主要学习内容。当然学习的内容还包括老师根据多年教学经验及对该学科的研究的一些深入见解。 在现代科学技术飞速发展中,伴随着学科的高度分化和高度综合,各学科之间相互交叉、相互渗透,出现了横向科学。作为跨接于自然科学和社会科学的具有横向科学特点的现代控制理论已成为我国理工科大学高年级的必修课。 经典控制理论的特点 经典控制理论以拉氏变换为数学工具,以单输入-单输出的线性定常系统为主要的研究对象。将描述系统的微分方程或差分方程变换到复数域中,得到系统的传递函数,并以此作为基础在频率域中对系统进行分析和设计,确定控制器的结构和参数。通常是采用反馈控制,构成所谓闭环控制系统。经典控制理论具有明显的局限性,突出的是难以有效地应用于时变系统、多变量系统,也难以揭示系统更为深刻的特性。当把这种理论推广到更为复杂的系统时,经典控制理论就显得无能为力了,这是因为它的以下几个特点所决定。 1.经典控制理论只限于研究线性定常系统,即使对最简单的非线性系统也是无法处理的;这就从本质上忽略了系统结构的内在特性,也不能处理输入和输出皆大于1的系统。实际上,大多数工程对象都是多输入-多输出系统,尽管人们做了很多尝试,但是,用经典控制理论设计这类系统都没有得到满意的结果;2.经典控制理论采用试探法设计系统。即根据经验选用合适的、简单的、工程上易于实现的控制器,然后对系统进行分析,直至找到满意的结果为止。虽然这种设计方法具有实用等很多完整,从而促使现代控制理论的发展:对经典理论的精确化、数学化及理论化。优点,但是,在推理上却是不能令人满意的,效果也
实验一金属材料的拉伸及弹性模量测定试验实验时间:设备编号:温度:湿度: 一、实验目的 1、观察低碳钢和铸铁在拉伸过程中的力与变形的关系。 2、测定低碳钢的弹性模量E。 3、测定低碳钢拉伸时的屈服极限;强度极限,伸长率和截面收缩率 4、测定铸铁的强度极限。 5、比较低碳钢(塑性材料)与铸铁(脆性材料)拉伸时的力学性质。 6、了解CMT微机控制电子万能实验机的构造原理和使用方法。 二、实验设备和仪器 1.CMT微机控制电子万能实验机 2.电子式引伸计仪 3.游标卡尺 4.钢尺 三.实验原理 试件夹持在夹具上,点击试件保护键,消除夹持力,调节拉力作用线,使之能通过试件轴线,实现试件两端的轴向拉伸。 试件在开始拉伸之前,设置好保护限位圈,微机控制系统首先进入POWERTEST3.0界面。试件在拉伸过程中,POWERTEST3.0软件自动描绘出一条力与变形的关系曲线如图1—2,低碳钢在拉伸到屈服强度时,取下引伸计,试件继续拉伸,直至试件被拉断。
低碳钢试件的拉伸曲线(图1—2a)分为四个阶段―弹性、屈服、强化、颈缩四个阶段。 铸铁试件的拉伸曲线(图1—2b)比较简单,既没有明显的直线段,也没有屈服阶段,变形很小时试件就突然断裂,断口与横截面重合,断口形貌粗糙。抗拉强度σb 较低,无明显塑性变形。与电子万能实验机联机的微型电子计算机自动给出低碳钢试件的屈服载荷Fs 、最大载荷Fb 和铸铁试件的最大载荷Fb 。 取下试件测量试件断后最小直径d1和断后标距 l1,由下述公式 A Fs s = σ A F b b = σ %1000 1?-= l l l δ %1000 1 0?-= A A A ψ 可计算低碳钢的拉伸屈服点σs 。、抗拉强度σb 、伸长率δ,和断面收缩率ψ;铸铁的抗拉强度σb 。 低碳钢的弹性模量E 由以下公式计算: l A Fl E ??= 00 式中ΔF 为相等的加载等级,Δl 为与ΔF 相对应的变形增量。 四、实验步骤 (1)低碳钢拉伸试验步骤
实验试做报告 1 2 附件: 数据与处理: (gd—ⅲ南京激光仪器厂光电效应实验仪) 光阑孔直径φ= 10mm; -11 3 2、作图 4 14 截止电压(纵坐标,单位:v)——频率(横坐4标,单位:x10hz): 3、数据处理:(两种方法选一种):(1)利用坐标纸: 5 根据实验数据利用坐标纸上画出每个频率下的伏安特性曲线,并找出相应的截止电压、作出截止电压——频率图,找出斜率,再根据公式h=ek 求出普朗克常数。 (2)利用电脑: 将实验数据打入在excel表格中,点击“图表向导”作出每个频率下的伏安特性曲线图形,确定截止电压;再利用遏止电压——频率数据作出遏止电压——频率图,鼠标指向图线,按鼠标“右键”,点击“添加趋势线”,在“类型”中选则“线性(l)”,在“选项”中选“显示公式(e)”,在显示图形上,可直接确定斜率的大小,根据公式h=ek 求出普朗克常数。 (3)不确定度的处理方法: 在excel中选:4个空格→fx→统计→linest(双击) →分别在表格最上的1、2两行中,填入原始数据;在3、4两行中,分别填入true、true→(cerl+shift+enter),则第二行第一个数据即为线性拟合不确定度。 计算:从图上看出斜率为:0.4378 x10-14; ?h=0.030507888×10 - 34 (j·s ) =0.031×10- 34(j·s ) 计算得: h=ek=1.6×10-19×0.4378×10-14=7.01×10- 34(j·s ) ?34 h???h?(7.01?0.04)?10js公认值: h0=6.63×10-34(j·s) 百分差: h?h7.01?10?6.63?10(最多取两位) e??100%??100%?5.5% h6.63?10 ?34 ?34
实验三 利用MATLAB 导出连续状态空间模型的离散化模型 实验目的: 1、基于对象的一个连续时间状态空间模型,导出其相应的离散化状态空间模型; 2、通过编程、上机调试,掌握离散系统运动分析方法。 实验原理: 给定一个连续时间系统的状态空间模型: ()()()()()() x t Ax t Bu t y t Cx t Du t =+=+ (3.1) 状态空间模型(3.1)的输入信号()u t 具有以下特性: ()(),u t u kT kT t kT T =≤≤+ (3.2) 已知第k 个采样时刻的状态()x kT 和第k 个采样时刻到第1k +个采样时刻间的输入()()u t u kT =,可得第1k +个采样时刻(1)k T +处的状态 (1)((1))((1))()((1))()k T kT x k T k T kT x kT k T Bu d τττ++=Φ+-+Φ+-? (3.3) 其中: ((1))((1))A k T kT AT k T kT e e +-Φ+-== ((1))((1))A k T k T e ττ+-Φ+-= 由于输入信号在两个采样时刻之间都取常值,故对式(3.3)中的积分式进行一个时间变量替换(1)k T στ=+-后,可得 0((1))()()()AT A x k T e x kT e d Bu kT τ σσ+=+? (3.4) 另一方面,以周期T 对输出方程进行采样,得到 ()()()y kT Cx kT Du kT =+ 在周期采样的情况下,用k 来表示第k 个采样时刻kT 。因此,连续时间状态空间模型
(3.1)的离散化方程可以写成 (1)()()()()()()() x k G T x k H T u k y k Cx k Du k +=+=+ (3.5) 其中: 0()()()AT A G T e H T e d B τσσ==? (3.6) 已知系统的连续时间状态空间模型,MATLAB 提供了计算离散化状态空间模型中状态矩阵和输入矩阵的函数: [G ,H]=c2d(A,B,T) 其中的T 是离散化模型的采样周期。 实验步骤 1、导出连续状态空间模型的离散化模型,采用MA TLAB 的m-文件编程; 2、在MA TLAB 界面下调试程序,并检查是否运行正确。 例3.1 已知一个连续系统的状态方程是 010()()()2541x t x t u t ????=+????--???? 若取采样周期0.05T =秒,试求相应的离散化状态空间模型。 编写和执行以下的m-文件: A=[0 1;-25 –4]; B=[0;1]; [G ,H]=c2d(A,B,0.05) 得到 G= 0.9709 0.0448 -1.1212 0.7915 H= 0.0012 0.0448 因此,所求的离散化状态空间模型是 0.97090.04480.0012(1)()()1.12120.79150.0448x k x k u k ????+=+????-????
销售管理实验报告 篇一:销售管理实训总结报告 销售管理实训总结报告 XX442866 张萌 一、实训目的 本次实训目的是让我们更好的了解和掌握销售管理的种种步骤及要求,如何做好产品的销售工作,包括从销售计划的制定到销售渠道的建设以及销售团队的建立和管理等等的工作步骤,把理论知识运用到实践中去。 二、实训意义 通过本次实训,使学生全面了解和掌握有关销售管理工作的各个方面,建设、管理销售渠道和销售团队的方法。通过实训,使学生能够对销售管理有一个全方位的认识,丰富相关知识,从而为以后走向相关工作岗位打下坚实的基础。 三、实训时间 XX年1月6日----XX年1月10日 四、实训地点 重庆科技学院经管大楼F404 五、实训内容 1.企业简介 2.企业市场环境分析 3.销售组织设计
4.销售团队管理制度设计 5.销售区域及渠道管理 6.客户管理 7.销售计划管理 六、总结体会 本周的实训是翟静老师的销售管理课程,实训重要的任务就是结合企业,具体了解企业的销售组织结构、销售渠道及团队建设。本次实训的目的,在于理解销售管理工作在市场营销中的重要作用,并熟练的掌握销售管理各方面的知识,为今后的工作打下良好的基础。通过本次实训进一步掌握销售管理各方面的知识,学会在市场营销中,如何才能建立一个好的销售渠道和一个优秀的销售团队, 实 现企业最佳的经济效益。 通过一周的实训,使我对销售管理工作有了进一步了解和感触,进一步掌握了销售管理工作中的各种要点。同时,我还发现有很多的不足之处,也为自己积累下了日后销售管理工作的经验。实训是我大学生活中拥有的一段经历,也是给我上了在课堂上学不到的非常重要的一课。它使我在实践中了解社会,让我在踏入社会之前打了一针预防针,让我明白做销售的艰辛,为我以后走入社会打下了基础。 我会珍惜在学校的每一次难得的学习机会,而这样的实训学习更是值得我去珍惜!相信,有了这一次实训经历,无
实验六利用MATLAB设计状态观测器 ******* 学号 1121*****
实验目的: 1、学习观测器设计算法; 2、通过编程、上机调试,掌握基于观测器的输出反馈控制系统设计方法。 实验原理: 1、全阶观测器模型: () ()x Ax Bu L y Cx A LC x Bu Ly =++-=-++ 由极点配置和观测器设计问题的对偶关系,也可以应用MATLAB 中极点配置的函数来确定所需要的观测器增益矩阵。例如,对于单输入单输出系统,观测器的增益矩阵可以由函数 L=(acker(A ’,C ’,V))’ 得到。其中的V 是由期望的观测器极点所构成的向量。类似的,也可以用 L=(place(A ’,C ’,V))’ 来确定一般系统的观测器矩阵,但这里要求V 不包含相同的极点。 2、降阶观测器模型: ???w Aw By Fu =++ b x w Ly =+ 基于降阶观测器的输出反馈控制器是: ????()[()]()b a b b a b w A FK w B F K K L y u K w K K L y =-+-+=--+ 对于降阶观测器的设计,使用MATLAB 软件中的函数 L=(acker(Abb’,Aab’,V))’ 或 L=(place(Abb’,Aab’,V))’ 可以得到观测器的增益矩阵L 。其中的V 是由降阶观测器的期望极点所组成的向量。 实验要求 1.在运行以上例程序的基础上,考虑图6.3所示的调节器系统,试针对被控对象设计基于全阶观测器和降 阶观测器的输出反馈控制器。设极点配置部分希望的闭环极点是1,22j λ=-± (a ) 对于全阶观测器,1 8μ=-和 28μ=-; (b ) 对于降阶观测器,8μ=-。 比较系统对下列指定初始条件的响应: (a ) 对于全阶观测器: 1212(0)1,(0)0,(0)1,(0)0x x e e ==== (b ) 对于降阶观测器: 121(0)1,(0)0,(0)1x x e === 进一步比较两个系统的带宽。