第十四章 二维运动估计
- 格式:doc
- 大小:1.14 MB
- 文档页数:34
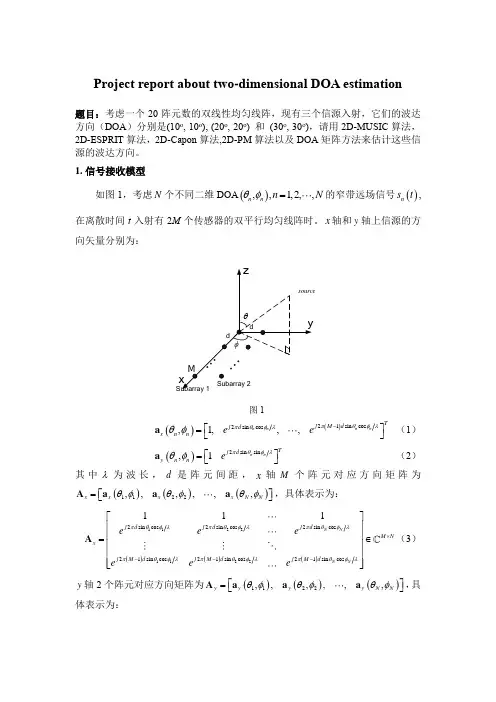
Project report about two -dimensional DOA estimation题目:考虑一个20阵元数的双线性均匀线阵,现有三个信源入射,它们的波达方向(DOA )分别是(10o , 10o ), (20o , 20o ) 和 (30o , 30o ),请用2D -MUSIC 算法,2D -ESPRIT 算法,2D -Capon 算法,2D -PM 算法以及DOA 矩阵方法来估计这些信源的波达方向。
1. 信号接收模型如图1,考虑N 个不同二维DOA (),,1,2,,n n n N θφ=的窄带远场信号()n s t ,在离散时间t 入射有2M 个传感器的双平行均匀线阵时。
x 轴和y 轴上信源的方向矢量分别为:图1()()21sin cos 2sin cos ,1,,,n n n n Tj M d j d x n n e e πθφλπθφθφ-⎡⎤=⎣⎦a (1)()2sin sin ,1n n Tj d y n n e πθφλθφ⎡⎤=⎣⎦a(2)其中λ为波长,d 是阵元间距,x 轴M 个阵元对应方向矩阵为()()()1122,,,,,,x x x x N N θφθφθφ=⎡⎤⎣⎦A a a a ,具体表示为:()()()112211222sin cos 2sin cos 2sin cos 21sin cos 21sin cos 21sin cos 111N NN Nj d j d j d M Nx j M d j M d j M d e e e e e e πθφλπθφλπθφλπθφλπθφλπθφλ⨯---⎡⎤⎢⎥⎢⎥=∈⎢⎥⎢⎥⎢⎥⎣⎦A (3)y 轴2个阵元对应方向矩阵为()()()1122,,,,,,y y y y N N θφθφθφ⎡⎤=⎣⎦A a a a ,具体表示为:112222sin sin 2sin sin 2sin sin 1111N NNy j d j d j d eeeπθφπθφλπθφλ⨯⎡⎤=∈⎢⎥⎣⎦A (4)双平行线阵中子阵列1的接收信号为()()()11x t s t t =+x A n(5)子阵列2的接收信号为()()()22x t t t =+x A Φs n(6)其中()1t n 和()2t n 分别表示子阵列1和2的与信号不相干的加性高斯白噪声,112sin sin 2sin sin ,,N N j d j d diag e e πθφλπθφλ⎡⎤=⎣⎦Φ,()()()11,TN N t s t s t ⨯=∈⎡⎤⎣⎦s 表示信源矢量。

J.Korean Math.Soc.48(2011),No.5,pp.985–999/10.4134/JKMS.2011.48.5.985A FILLED FUNCTION METHOD FOR BOX CONSTRAINEDNONLINEAR INTEGER PROGRAMMINGYoujiang Lin and Yongjian YangAbstract.A newfilled function method is presented in this paper tosolve box-constrained nonlinear integer programming problems.It isshown that for a given non-global local minimizer,a better local min-imizer can be obtained by local search starting from an improved initialpoint which is obtained by locally solving a box-constrained integer pro-gramming problem.Several illustrative numerical examples are reportedto show the efficiency of the present method.1.IntroductionIn[13],Zhu showed that over unbounded domain,the integer programming is undecidable;i.e.,there cannot be any algorithm for the problem.So we consider the following box-constrained discrete global optimization problem: (1.1)min{f(x):x∈X⊂Z n},where f:Z n→R,and Z n is the set of integer points in R n,and X is box;i.e., X={x∈Z n:a≤x≤b,a,b∈Z n}.Like the continuous global optimization problems,the existence of multiple local minima of a general nonconvex objective function makes discrete global optimization a great challenge.For continuous global optimization problems, many deterministic methods(see[1],[7],[8],[10])have been proposed to search for a globally optimal solution of a function of several variables.Thefilled function algorithm(see[2],[4])is an effective and practical method among determinate algorithms.The primaryfilled function was proposed by Ge in paper[2].The definition of thefilled function is as follows:Definition1.1.Assume that x∗1is a current minimizer of f(x).A continuous function P(x)is said to be afilled function of f(x)at x∗1if it satisfies the following properties:Received March8,2010;Revised July26,2010.2010Mathematics Subject Classification.52A10,52A40.Key words and phrases.global optimization,filled function method,nonlinear integer programming,local minimizer,global minimizer.The authors would like to acknowledge the support from the National Natural Science Foundation of China(10971128),Shanghai Leading Academic Discipline Project(S30104).c⃝2011The Korean Mathematical Society985986YOUJIANG LIN AND YONGJIAN YANG(1)x∗1is a maximizer of P(x)and the whole basin B∗1of f(x)at x∗1becomesa part of a hill of P(x);(2)P(x)has no minimizers or saddle points in any higher basin of f(x)than B∗1;(3)If f(x)has a lower basin than B∗1,then there is a point x′in such abasin that minimizes P(x)on the line through x and x∗1.For the definitions of basin and hill,refer to Ge(1990),paper[2].Thefilled function given at x∗1in the paper[2]has the following form:(1.2)P(x,x∗1,r,ρ)=1r+f(x)exp(−∥x−x∗1∥2ρ2),where the parameters r andρneed to be chosen appropriately.The main idea of thefilled function method is to construct an auxiliary func-tion calledfilled function via the current local minimizer of the original opti-mization problem,with the property that the current local minimizer is a local maximizer of the constructedfilled function and a better initial point of the primal optimization problem can be obtained by minimizing the constructed filled function locally.By the same idea as that of solving continuous global optimization problems,We try to solve discrete global optimization problem (1.1).In[3],Ge adapted thefilled function method by Ge[2]for continuous global optimization to the discrete case.However,thefilled function algorithm de-scribed in the paper[2]still has some unexpected features:(i)The efficiency of thefilled function algorithm strongly depend on two parameters r and q.They are not so easy to be adjusted to make them satisfy the needed conditions;(ii)Thefilled function includes exponential terms.If the value of1/ρbe-comes large as iterations proceed,as required to preserve thefilling property, numerical illness may result in failure of computation;(iii)The termination criteria is not good because it requires a large amount of computation before a global minimizer has been found.In this paper,we provide a new definition of the discretefilled function,and a discretefilled function satisfying the definition is presented.An algorithm is developed from the newfilled function.The newfilled function algorithm overcomes the disadvantages mentioned above in a certain extent.Specifically, it has the following several advantages:(i)The newfilled function includes neither exponential terms nor logarithmic terms.Elementary functionϕ(t)=arctan t is used in thefilled function,which possesses many good properties and is efficient in numerical implementations.(ii)The parameters q and r in the newfilled function are easier to be ap-propriately chosen than those of the originalfilled function(1.2).(iii)The new algorithm has a simple termination criteria and the compu-tational results show that this algorithm is more efficient than the original algorithm.A FILLED FUNCTION METHOD987The rest of this paper is organized as follows.In Section2,wefirst re-call some definitions in discrete analysis and discrete optimization.In Section 3,a definition of discretefilled function is given,a discretefilled function is presented,and we investigate its properties.An algorithm is developed and numerical experiments are presented in Section4.Finally,some conclusions are drawn in Section5.2.PreliminaryFirst,we recall some definitions in discrete analysis and discrete optimization (see[11],[12]).Definition2.1.A sequence{x i}u i=−1is called a discrete path in X between two distinct point x∗and x∗∗in X if x−1=x∗,x u=x∗∗,x i∈X for all i; x i=x j for i=j;and∥x0−x∗∥=∥x i+1−x i∥=∥x∗∗−x u−1∥=1for all i.If such a discrete path exists,then x∗and x∗∗are said to be pathwise connected in X.Furthermore,if every two distinct points in X are pathwise connected in X,then X is called a pathwise connected set.Definition2.2.The set of all axial directions in Z n is defined by D={±e i: i=1,2,...,n},where e i is the i th unit vector;The set of all feasible directions at x∈X is defined by D x={d∈D:x+d∈X},where D is the set of axial directions.Definition2.3.For any x∈Z n,the discrete neighborhood of x is defined by N(x)={x,x±e i:i=1,2,...,n};The discrete interior of X is defined by int X={x∈X:N(x)⊆X}.While,the discrete boundary of X is denoted by∂X=X/int X.Definition2.4.A point x∗∈X is called a discrete local minimizer of f over X if f(x∗)≤f(x)for all x∈X∩N(x∗).If,in addition,f(x∗)<f(x)for all x∈X∩N(x∗)/{x∗},then x∗is called a strict discrete local minimizer of over X;A point x∗∈X is called a discrete global minimizer of f over X if f(x∗)≤f(x)for all x∈X.If,in addition,f(x∗)<f(x)for all x∈X,then x∗is called a strict discrete global minimizer of f over X.Definition2.5.For any x∈X,d∈D is said to be a discrete descent direction of f at x over X if x+d∈X and f(x+d)<f(x);beside,d∗∈D is called a discrete steepest descent direction of f at x over X if f(x+d∗)≤f(x+d)for all d∈D∗,where D∗is the set of all descent direction of f at x over X. Algorithm2.6.(Discrete steepest descent method).1.Start from the initial point x∈X.2.If x is a local minimizer of f over X,then stop.Otherwise,a discrete steepest descent direction d∗of f at x over X can be found.3.Let x:=x+λd∗,whereλ∈Z+is the step length such that f has maximum reduction in direction d∗,and go to Step2.988YOUJIANG LIN AND YONGJIAN YANGAlgorithm 2.7.(Modified discrete descent method).1.Start from the initial point x ∈X .2.If x is a local minimizer of f over X ,then stop.Otherwise,letd ∗=argmin {f (x +d i ):d i ∈D x ,f (x +d i )<f (x )},where D x denotes the set of feasible directions at x .3.Let x :=x +d ∗,and go to Step 2.Obviously,by Algorithms 2.6and 2.7,we can only find a discrete local minimizer.Finally,for the discrete global optimization problem (1.1),we make the following assumptions in this paper:Assumption 2.8.X ⊆Z n is a bounded set which contains more than one point.This implies that there exists a constant K >0such that1≤K =max x,y ∈X∥x −y ∥≤∞,where ∥·∥is the usual Euclidean norm.Assumption 2.9.f :∪x ∈X N (x )→R satisfies the following Lipschiz condi-tion for every x,y ∈∪x ∈X N (x ):|f (x )−f (y )|≤L ∥x −y ∥,where 0<L <∞is a constant,N (x )is the discrete neighborhood of x .3.A filled function and its propertiesIn this section,we propose a filled function of f (x )at a current local mini-mizer and discuss its properties.LetS 1={x :|f (x )≥f (x ∗1),x ∈X \{x ∗1}},S 2={x |f (x )<f (x ∗1),x ∈X }.Definition 3.1.P (x,x ∗1)is called a discrete filled function of f (x )at a discrete local minimizer x ∗1if P (x,x ∗1)has the following properties:(1)x ∗1is a strict discrete local maximizer of P (x,x ∗1)on X ;(2)P (x,x ∗1)has no discrete local minimizers in the region S 1;(3)If x ∗1is not a discrete global minimizer of f (x ),then P (x,x ∗1)does havea discrete minimizer in the region S 2.Now,we give a discrete filled function for problem (1.1)at a local minimizer x ∗1as follows:F (x,x ∗1,q,r )=1q +∥x −x ∗1∥ϕq (max {f (x )−f (x ∗1)+r,0}),(3.1)whereϕq (t )={arctan (−qt )+π2,if t =0,0,if t =0.(3.2)r=0.2q>0and r satisfies0<r<maxx∗,x∗1∈L(P)f(x∗)<f(x∗1)(f(x∗1)−f(x∗))where L(P)stand for the set of discrete local minimizers of f(x).A simple example is given in Figure1.Next we will show that the function F(x,x∗1,q,r)is a discretefilled function satisfying Definition3.1under certain conditions on the parameters q and r. Theorem3.2.Suppose that X holds Assumption2.8.Further suppose that x∗1 is a discrete local minimizer of f(x).For any r>0,when q>0is satisfactorily small,x∗1is a strict discrete local maximizer of F(x,x∗1,q,r).Proof.Since x∗1is a discrete local minimizer of f(x)for any x∈N(x∗1)∩X, f(x)≥f(x∗1)and∥x−x∗1∥=1.Hence,we haveF(x,x∗1,q,r)=1q+1(arctan(−qf(x)−f(x∗1)+r)+π2)andF(x∗1,x∗1,q,r)=1q(arctan(−qr)+π2),990YOUJIANG LIN AND YONGJIAN YANGwhen x ≥y ,arctan(x )−arctan(y )≤x −y ;let q <r ,we haveF (x,x ∗1,q,r )−F (x ∗1,x ∗1,q,r )=1q +1(arctan(−q f (x )−f (x ∗1)+r )+π2)−1q (arctan(−q r )+π2)=1q +1arctan(−q f (x )−f (x ∗1)+r )−1q arctan(−q r )+−1q (q +1)π2=1q +1×(arctan(q r )−arctan(q f (x )−f (x ∗1)+r ))+1q ×(q +1)(arctan(q r )−π2)<1q ×(q +1)×(q ×(q r −q f (x )−f (x ∗1)+r )+(arctan 1−π2))=1q ×(q +1)×(q 2×f (x )−f (x ∗1)r ×(f (x )−f (x ∗1)+r )−π4)≤1q ×(q +1)×(q 2×L ∥x −x ∗1∥r 2−π4)=1q ×(q +1)×(q 2×L r 2−π4)≤1q ×(q +1)×(q ×L r −π4).Therefore,when 0<q <min {r,πr 4L },we have F (x,x ∗1,q,r )−F (x ∗1,x ∗1,q,r )<0for any x ∈N (x ∗1)∩X ,x ∗1is a strict discrete local maximizer of F (x,x ∗1,q,r ).□Lemma 3.3.For every x ,x ∗∈X ,if there exits i ∈{1,2,...,n }such that x ±e i ∈X ,then there exists d ∈D such that∥x +d −x ∗∥>∥x −x ∗∥.Proof.If there is an i ∈{1,2,...,n }such that x ±e i ∈X ,then either ∥x +e i −x ∗∥>∥x −x ∗∥or ∥x −e i −x ∗∥>∥x −x ∗∥,therefore we let d =e i or d =−e i ,this completes the proof.□Theorem 3.4.Suppose that Assumptions 2.8-2.9are satisfied.If x ∗1is a discrete local minimizer of f (x ),then the function F (x,x ∗1,q,r )has no discrete local minimizers in the region S 1={x |f (x )≥f (x ∗1),x ∈X/{x ∗1}}when r >0and q >0are satisfactorily small.Proof.Let ˜X =∪x ∈X N (x ),obviously,˜X holds Assumptions 2.8-2.9,and wehave S 1⊆X ⊆int ˜X.For every x ∈S 1,by Lemma 3.3,there must exists a direction d ∈D such that x +d ∈X and∥x +d −x ∗1∥>∥x −x ∗1∥.A FILLED FUNCTION METHOD991 Consider the following two cases:(1)f(x+d)≥f(x∗1):Since f(x+d)≥f(x∗1),we haveF(x+d,x∗1,q,r)−F(x,x∗1,q,r)=1q+∥x+d−x∗1∥(arctan(−qf(x+d)−f(x∗1)+r)+π2)−1q+∥x−x∗1∥(arctan(−qf(x)−f(x∗1)+r)+π2)=1q+∥x+d−x∗1∥arctan(−qf(x+d)−f(x∗1)+r)−1q+∥x−x∗1∥arctan(−qf(x)−f(x∗1)+r)+∥x−x∗1∥−∥x+d−x∗1∥(q+∥x+d−x∗1∥)(q+∥x−x∗1∥)π2=1q+∥x+d−x∗1∥×(arctan(q∗1)−arctan(q∗1))+∥x+d−x∗1∥−∥x−x∗1∥(q+∥x+d−x∗1∥)(q+∥x−x∗1∥)(arctan(qf(x)−f(x∗1)+r)−π2).If f(x)>f(x+d),thenarctan(qf(x)−f(x∗1)+r)−arctan(qf(x+d)−f(x∗1)+r)<0therefore when q<r,we have arctan(qf(x)−f(x∗1)+r)−π2<0,henceF(x+d,x∗1,q,r)−F(x,x∗1,q,r)<0.If f(x)≤f(x+d)for any x,y∈R,when x≤y,we have arctan y−arctan x≤y−x,let q<r and q<1,we haveF(x+d,x∗1,q,r)−F(x,x∗1,q,r)≤1q+∥x+d−x∗1∥×(qf(x)−f(x∗1)+r−qf(x+d)−f(x∗1)+r)+∥x+d−x∗1∥−∥x−x∗1∥(q+∥x+d−x∗1∥)(q+∥x−x∗1∥)(arctan1−π2)≤qq+∥x+d−x∗1∥×(f(x+d)−f(x)(f(x)−f(x∗1)+r)(f(x+d)−f(x∗1)+r))+∥x+d−x∗1∥−∥x−x∗1∥(q+∥x+d−x∗1∥)(2∥x−x∗1∥)(arctan1−π2)≤1(q+∥x+d−x∗1∥)(2∥x−x∗1∥)992YOUJIANG LIN AND YONGJIAN YANG×(2qL∥d∥∥x−x∗1∥r2−π4(∥x+d−x∗1∥−∥x−x∗1∥)).Hence,for any given x∈S1and d,when q is satisfactorily small thatq<πr2(∥x+d−x∗1∥−∥x−x∗1∥)8L∥x−x∗1∥,we haveF(x+d,x∗1,q,r)<F(x,x∗1,q,r).(2)f(x+d)<f(x∗1):In this case,it is clear that f(x+d)<f(x),sincefunction f(t)=arctan(−qt )+π2is increasing about t,hence,we haveF(x+d,x∗1,q,r)<F(x,x∗1,q,r).The above two cases imply that any x∈S1is not the discrete local minimizer of F(x,x∗1,q,r)when q is satisfactorily small.□Theorem3.5.If x∗1is not a discrete global minimizer of f(x)in X,then there exists a discrete minimizer¯x1∗of F(x,x∗1,q,r)in the region S2={x|f(x)< f(x∗1),x∈X}.Proof.Since x∗1is not a discrete global minimizer and F(x,x∗1,q,r)≥0,there exist a point¯x1∗∈S2and r such that f(¯x1∗)<f(x∗1)−r.Hence,F(¯x1∗,x∗1,q,r) =0,it implies that¯x∗1∈S2is a discrete minimizer of F(x,x∗1,q,r).□Theorem3.2,Theorem3.4,and Theorem3.5show that the function F(x, x∗1,q,r)at point x∗1is a discretefilled function satisfying Definition3.1with satisfactorily small q and r.The following theorems further show that the proposedfilled function has some good properties which classical functions have.Theorem3.6.Suppose that Assumption2.9is satisfied.If x1,x2∈X and satisfy the following conditions:(1)f(x1)≥f(x∗1)and f(x2)≥f(x∗1),(2)∥x2−x∗1∥>∥x1−x∗1∥.Then,when r>0and q>0are satisfactorily small,F(x2,x∗1,q,r)<F(x1,x∗1,q,r).Proof.Consider the following two cases:(1)If f(x∗1)≤f(x2)≤f(x1),then it is obvious that the result follows.(2)If f(x∗1)≤f(x1)<f(x2),the result also holds(see the proof process in Theorem3.4).□Theorem3.7.If x1,x2∈X and satisfy the following conditions:(1)∥x2−x∗∥>∥x1−x∗∥,(2)f(x1)≥f(x∗1)>f(x2),and f(x2)−f(x∗1)+r>0.Then,we have F(x2,x∗1,r,q)<F(x1,x∗1,r,q).A FILLED FUNCTION METHOD993 Proof.By Conditions1and2,we have1q+∥x2−x∗1∥<1q+∥x1−x∗1∥and0<f(x2)−f(x∗1)+r<f(x1)−f(x∗1)+r.Hence F(x2,x∗1,r,q)<F(x1,x∗1,r,q).□Now we make some remarks.Firstly,in the phase of minimizing the new discretefilled function,Theorems3.6and3.7guarantee that the current dis-crete local minimizer x∗1of the objective function is escaped and the minimum of the new discretefilled function will be always achieved at a point where the objective function value is less than the current discrete minimum.Secondly, the parameters q and r are easier to be appropriately chosen.In the next section,a new discretefilled function algorithm is given.4.Algorithm and numerical resultsBased on the theoretical results in the previous section,a global optimization algorithm over X is proposed as follows:AlgorithmInitialization:(1)Choose any x0∈X as an initial point.(2)Letε=10−5and q0=0.01.(3)Let D0={±e i:i=1,2,...,n}.Main Program:(1)Starting from initial point x0,minimize f(x)(x∈X)by the discretesteepest descent method(see Algorithm2.1),we can obtain the discretelocal minimizer x∗1.Let r=1,q=q0and D=D0.(2)Construct the discretefilled function:F(x,x∗1,q,r)=1q+∥x−x∗∥ϕq(max{f(x)−f(x∗1)+r,0}),whereϕq(t)={arctan(−qt)+π2,if t=0, 0,if t=0.(3)If r≤ε,then terminate the iteration,the x∗k is the global minimizer off(x),otherwise,the next step.(4)If D=∅,then goto(6),otherwise the next step.(5)If q<ε×10−2,then let r=r/10,q=q0/10and D=D0,goto(2);otherwise let q=q/10,goto(2).(6)Take a direction d∈D,and D←D/{d},turn to Inner Loop.994YOUJIANG LIN AND YONGJIAN YANGInner Loop:(1)k=0.(2)Let y k=x∗1+d.(3)Minimize F(x,x∗1,q,r),starting from the point y k,by implementing themodified discrete descent method(see Algorithm2.2).y k+1denotes thenext iterative point.(4)If y k+1/∈X,then return Main Program(4),otherwise next step.(5)If f(y k+1)≤f(x∗1),then let x0=y m+1and return Main program(1),otherwise let k=k+1and goto Inner Loop(3).In the following part,several test problems are given and results of the algorithm in solving these problems are reported.Through out the tests,we use the modified discrete descent method as shown in Algorithm2.7to perform local searches,in the initialization of the algorithm we let q=0.01and r=1. The algorithm in Fortran95is successfully used tofind the global minimizers of these test problems.The main iterative results are summarized in tables for each function.The symbols used are shown as follows:k:The iteration number infinding the k th local minimizer.x0 k or y0k:The k th initial point.f(x0k )or f(y0k):The function value of the k th initial point.x∗k or y∗k:The k th local minimizer.f(x∗k )or f(y∗k):The function value of the k th local minimizer.Problem4.1.min f(x)=100(x2−x21)2+(1−x1)2+90(x4−x23)2+(1−x3)2,+10.1[(x2−1)2+(x4−1)2]+19.8(x2−1)(x4−1), s.t.10≤x i≤10,i=1,2,3,4.This problem is a discrete counterpart of the problem38in[6].It is a box constrained nonlinear integer programming problem.It has214≈1.94×105 feasible points where41of them are discrete local minimizers but only one of those discrete local minimizers is the discrete global minimum solution:x∗global =(1,1,1,1)with f(x∗global)=0.Let x01=(9,6,5,6)and x01=(9,−9,−9,9),a summary of the computational results are displayed in Tables 1and2.Problem4.2.min f(x)=g(x)h(x),s.t.x i=0.001y i,−2000<y i<2000,i=1,2,where y i(i=1,2)is integer,andg(x)=1+(x1+x2+1)2(19−14x1+3x21−14x2+6x1x2+3x2),h(x)=30+(2x1−3x2)2(18−32x1+12x21+48x2−36x1x2+27x22).A FILLED FUNCTION METHOD995 Table1.Problem4.1initial point is(9,6,5,6)k x0k f(x0k)x∗kf(x∗k)1(9,6,5,6)596070.0(3,8,3,8)2158.0000 2(3,10,2,5)1887.5000(3,8,2,3)1007.5000 3(3,10,1,1)922.1000(3,8,0,−1)453.1000 4(2,5,0,−1)235.6000(2,4,0,0)43.6000 5(1,1,0,0)11.1000(1,1,1,1)0.0000 Table2.Problem4.1initial point is(9,−9,−9,9)k x0k f(x0k)x∗kf(x∗k)1(9,−9,−9,9)1276796.40(3,8,−3,8)2170.0000 2(3,10,−2,5)1895.5000(3,8,−2,3)1015.5000 3(3,10,−1,1)926.1000(3,8,0,−1)453.1000 4(2,5,0,−1)235.6000(2,4,0,0)43.6000 5(1,1,0,0)11.1000(1,1,1,1)0.0000Table3.Problem4.2k y0k f(y0k)y∗kf(y∗k)1(1000,1000)1876.000(1280,890)954.13822(2000,632)951.2482(1609,71)92.34253(1379,2000)19.4895(85,2000)−210795.62531(−1000,−1000)1890.000(0,−1000) 3.0000002(0,1740)−256.5294(85,2000)−210795.62531(2000,2000)35028.000(1280,890)954.13822(2000,632)951.2482(1609,71)92.34263(1379,2000)19.4895(85,2000)−210795.62531(−2000,−2000)20811.9999(0,−1000) 3.0000002(0,1740)−256.5294(85,2000)−210795.6253 This problem is a discrete counterpart of the Goldstein and Price’s function in[5].It is a box constrained nonlinear integer programming problem.It has 40012≈1.60×107feasible points.More precisely,it has207and2discrete local minimizers in the interior and the boundary of box−2.00≤x i≤2.00,i=1,2, respectively.Nevertheless,it has only one discrete global minimum solution:y∗global =(85,2000)with f(y∗global)=−210795.6253.We used four initial pointsin our experiment:(1000,1000),(−1000,−1000),(2000,2000),(−2000,−2000), a summary of the computational results are displayed in Table3.Problem4.3(Beale’s function).min f(x)=[1.5−x1(1−x2)]2+[2.25−x1(1−x22)]2+[2.625−x1(1−x32)]2,996YOUJIANG LIN AND YONGJIAN YANGTable4.Problem4.3k y0k f(y0k)y∗kf(y∗k)1(3000,5000)146039.2031(−3,9735) 6.06732(10000,963) 6.0183(3015,504)3.7589×10−5 1(−3000,−5000)150120.7031(11,−5964)9.02302(10000,788)8.9179(3015,504)3.7589×10−5 1(8000,8000)16992808.2031(−3,9735) 6.06732(10000,963) 6.0183(3015,504)3.7589×10−5 1(−8000,−8000)17121524.2031(5,−7842)8.67812(10000,790)8.6132(3015,504)3.7589×10−5Table5.Problem4.4k y0k f(y0k)y∗kf(y∗k)1(−5000,−5000,−5000,−5000)3650.0000(−116,12,55,−56)3.7213×10−4 2(−78,8,38,−38)7.9387×10−5(−79,8,38,−38)7.9045×10−5 3(11,−1,11,11)1.2798×10−6(10,−1,11,11)2.7985×10−7 4(0,0,3,3)2.1060×10−9(0,0,1,1)2.6000×10−11 1(5000,5000,5000,5000)3650.0000(116,−12,56,57)3.7859×10−4 2(78,−8,38,38)7.9387×10−5(79,−8,38,38)7.9045×10−5 3(−11,1,−11,−11)1.2798×10−6(−10,1,11,−11)2.7985×10−7 4(0,0,3,−3)2.1060×10−9(0,0,1,−1)2.6000×10−11Table6P N DN IN T I F N1450.236049532230.070732317673220.05216224364444278.245675801758525247.49104950368555021147.47298451600510024406.341276667658625242.6725336724326502249.264535436658610023087.764275437056s.t.x i=0.001y i,−104≤y i≤104,i=1,2,where y i(i=1,2)is integer.This problem is discrete counterpart if the problem203in[9].It is a box constrained nonlinear integer programming problem.It has200012≈4.00×108 feasible points and many discrete local minimizers,but it has only one discreteA FILLED FUNCTION METHOD 997Table parison of the resultsGe’s algorithm New algorithm PN DN IN TI F N RA IN TI F N RA 1.41073.667707461.22−4638.564466530.47−5321837.5366175644.73−311328.102295761.78−512657.0751126852.03−38375.807522360.38−435866.2673855076.12−418406.542453513.80−618659.5161008410.24−415315.345500551.67−62.21157.36723520.10−4648.0512303.15−613168.74265900.67−56123.0985675.03−71389.52763501.25−4631.9165850.72−63.263454.3553674598.07−412982.440134223.90−567098.6216532109.12−4101752.812179839.92−64.42012873.31053243183.19−3162577.1205453901.10−5205952.54630876415.00−416214.3423166343.00−65.253228750.21783421091.05−6181524.7083452972.13−7326532.0972*******.09−618352.761965312.20−7316098.73230678124.56−619213.450882064.12−76.25181105.5503680560.06−525428.650309874.31−818963.2712987675.01−525320.710756183.00−8182544.3268021142.10−523484.56289457.00−7183245.71123547700.38−525145.3542345528.29−8global minimum solution y ∗global =(3000,500)with f (y ∗global )=0.We used four initial points in our experiment:(3000,5000),(−3000,−5000),(8000,8000),(−8000,−8000),a summary of the computational results are displayed in Table 4.Problem 4.4(Powell’s singular function).min f (x )=(x 1+10x 2)2+5(x 3−x 4)2+(x 2−2x 3)4+10(x 1−x 4)4,s .t .x i =0.001y i ,−104≤y i ≤104,i =1,2,3,4,where y i (i =1,2,3,4)is integer.It is a box constrained nonlinear integer programming problem.It has 200014≈1.60×1017feasible points and many local minimizers,but it hasonly one global minimum solution:y ∗global =(0,0,0,0)with f (y ∗global )=0.We used two initial points in our experiment:(−5000,−5000,−5000,−5000),(5000,5000,5000,5000),a summary of the computational results are displayed in Table 5.Problem 4.5.min f (x )=(x 1−1)2+5(x n −1)2+n −1∑i =1(n −i )(x 2i −x i +1)2,s .t .−5≤y i ≤5,i =1,2,...,n.998YOUJIANG LIN AND YONGJIAN YANGThis problem is a generalization of the problem282in[9].It is a box con-strained nonlinear integer programming problem.It has11n feasible points andmany local minimizers,but it has only one global minimum solution:x∗global =(1,...,1)with f(x∗global )=0.For all problem with different size,we used fourinitial points in our experiment:(5,...,5),(−5,...,−5),(−5,...,−5,5,...,5), (5,...,5,−5,...,−5).For every experiment,the proposed algorithm succeeded in identifying the discrete global minimum.Let x01=(5,...,5),for n= 25,50,100,respectively,the summary of the computational results are dis-played in Table6.Problem4.6(Rosenbrock’s function).min f(x)=n−1∑i=1[100(x i+1−x2i)2+(1−x i)2],s.t.−5≤y i≤5,i=1,2,...,n.It is a box constrained/unconstrained nonlinear integer programming prob-lem.It has11n feasible points and many local minimizers,but it has onlyone global minimum solution:x∗global =(1,1,...,1)with f(x∗global)=0.Forall problems with different sizes,we used four initial points in our experiment: (5,...,5),(−5,...,−5),(−5,...,−5,5,...,5),(5,...,5,−5,...,−5).For ev-ery experiment,the proposed algorithm succeeded in identifying the discrete global minimum.Let x01=(5,...,5),for n=25,50,100,respectively,the summary of the computational results are displayed in Table6.In Table6,we give the experiment results for Problems4.1-4.6.In Table7, Problems4.1-4.6.with2to25variables are tested and the table shows that in most cases the newfilled function algorithm works better than Ge’sfilled function algorithm.The symbols used in Tables6-7are shown as follows: P N:The N th problem.DN:The dimension of objective function of a problem.IN:The number of iteration cycles.T I:The CPU time in seconds for the algorithm to stop.F N:The number of objective function evaluations for algorithm to stop.RA:The ratio of the number of function evaluations to the number of feasible points.5.ConclusionsThis paper gives a definition of thefilled function for the nonlinear integer programming problem,and presents a newfilled function.Afilled function algorithm based on this givenfilled function is designed.The implementation of the algorithm on several test problems is reported with satisfactory numerical results.A FILLED FUNCTION METHOD999 Acknowledgment.The authors are most grateful to the referee for his many excellent suggestions for improving the original manuscript.References[1] B.C.Cetin,J.Barhen,and J.W.Burdick,Terminal repeller unconstrained subenergytunneling(TRUST)for fast global optimization,J.Optim.Theory Appl.77(1993),no.1,97–126.[2]R.P.Ge,Afilled function method forfinding a global minimizer of a function of severalvariables,Math.Programming46(1990),no.2,(Ser.A),191–204.[3]R.P.Ge and C.B.Huang,A continuous approach to nonlinear integer programming,put.34(1989),no.1,part I,39–60.[4]R.P.Ge and Y.F.Qin,The globally convexizedfilled functions for global optimization,put.35(1990),no.2,part II,131–158.[5] A.A.Goldstein and J.F.Price,On descent from local minima,p.25(1971),569–574.[6]W.Hock and K.Schittkowski,Test Examples for Nonlinear Programming Codes,Springer,NewYork,1981.[7]R.Horst,P.M.Pardalos,and N.V.Thoai,Introduction to Global Optimization,seconded.,Kluwer Academic Publishers,Dordrecht,2000.[8] A.V.Levy and A.Montalvo,The tunneling algorithm for the global minimization offunctions,SIAM put.6(1985),no.1,15–29.[9]K.Schittkowski,More Test Examples for Nonlinear Programming Codes,Springer,NewYork,1987.[10]Y.Yao,Dynamic tunneling algorithm for global optimization,IEEE Trans.SystemsMan Cybernet.19(1989),no.5,1222–1230.[11]L.S.Zhang,F.Gao,and W.X.Zhu,Nonlinear integer programming and global opti-mization,put.Math.17(1999),no.2,179–190.[12]W.X.Zhu,An approximate algorithm for nonlinear integer programming,Appl.Math.Comput.93(1998),no.2-3,183–193.[13],Unsolvability of some optimization problems,put.174(2006),no.2,921–926.Youjiang LinDepartment of MathematicsShanghai UniversityShanghai200444,P.R.ChinaE-mail address:linyoujiang@Yongjian YangDepartment of MathematicsShanghai UniversityShanghai200444,P.R.ChinaE-mail address:yjyang@。
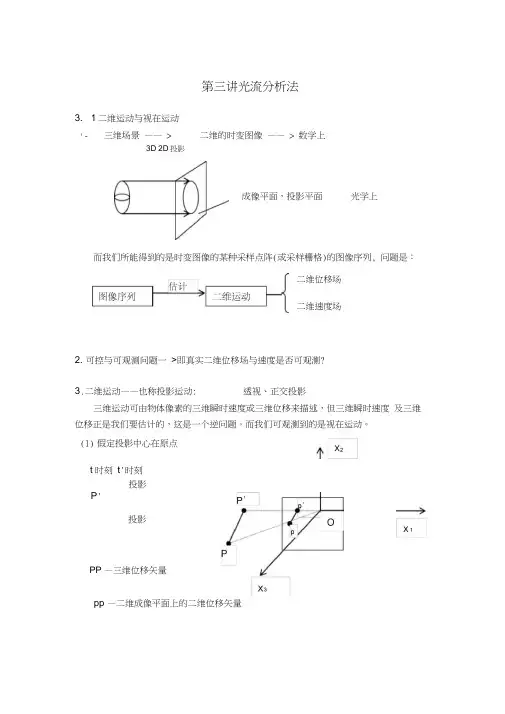
第三讲光流分析法3. 1二维运动与视在运动1- 三维场景 —— >二维的时变图像 —— > 数学上3D 2D 投影而我们所能得到的是时变图像的某种采样点阵(或采样栅格)的图像序列, 问题是:2. 可控与可观测问题一 >即真实二维位移场与速度是否可观测? 三维运动可由物体像素的三维瞬时速度或三维位移来描述,但三维瞬时速度 及三维位移正是我们要估计的,这是一个逆问题。
而我们可观测到的是视在运动。
(1) 假定投影中心在原点t '时刻投影pp —二维成像平面上的二维位移矢量成像平面,投影平面 光学上3.二维运动——也称投影运动:透视、正交投影t 时刻 P '投影PP —三维位移矢量二维位移场 二维速度场(2) 假定投影中心在O i 点 由于投影作用,从P 点出发,终点在O i P /虚线上的三维位移矢 量均有相同的二维投影位移矢量。
所以说,投影的结果只是三维真实 运动的部分信息。
(3) 设(X,t) R 3, t t l t 由像素的运动S c(X ,t) d c(X,t,t ')对应于点阵A 3 ,则有d p (X,t ; l t) d c (X,t ; l t),假定三维瞬时速度为(X i ,X 2,X 3),则V p (X,t) V c ( n,k)4. 光流场与对应场(1) pp 定义为对应矢量光流矢量定义为某点(X,t) R 3上的图像平面坐标的瞬时变化率, 为一个导数。
V (V i ,V 2 )T (dx i /dt,dx 2/dt)T表征了时空变化,而且是连续的变化。
(2) 当t t t 0时,则光流矢量与对应矢量等价。
如果在某个点阵A 3可 观测到这种变化,则就意义对应场 <——像素的二维位移矢量场 光流场 <――像素的二维速度矢量场 也分别称为二维视在对应场与速度场。
一般而言,对应矢量 工位移场光流矢量工速度场二维位移矢量函数(x ,t ) A 3d (n,k ; I) d p (X,t ; l t)(n ,k )Z 3k 表达了 t ‘- t 的时间离散n (n i , n 2)T光照变化—— >将防碍二维运动场的估计。
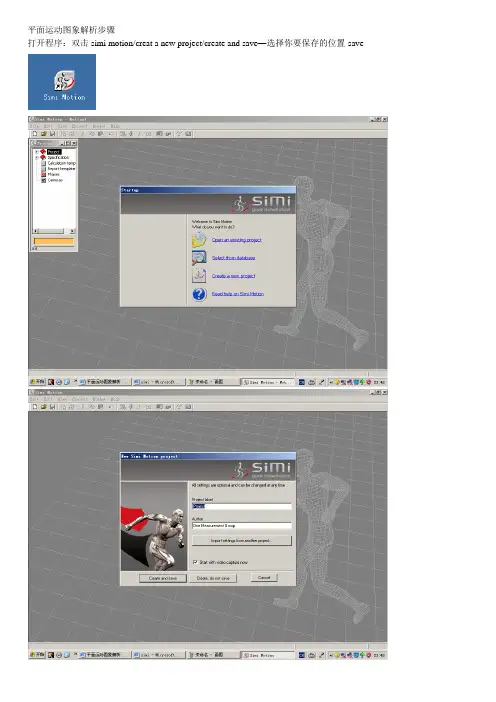
平面运动图象解析步骤打开程序:双击simi motion/creat a new project/create and save—选择你要保存的位置-save平面图像解析的步骤:一、建模(creating a sepcification)二、坐标换算(calibrating the camera)三、打点(获取象坐标,capturing the image coordinates)四、数值计算(calculating the scaled 2-D coordinates)五、数据输出(presenting the data)一、建模(creating a sepcification)建模的目的就是把人体简化为多刚体模型,通过选择相应的关节点并对关节点进行连线,从而形成人体棍图模型。
建模块包括2项内容:A.编辑坐标点(edit points);B.连接坐标点(connections)A.编辑坐标点:操作:Specification-points-(左键按住拖拽至右边黑色区域,或者在上单击右键-edit)a.把左侧的predefined栏中已设置的点拖拽到右边的uesed points栏中b.对选择后的坐标点的名称和颜色进行编辑:在所选坐标点上右击-property,进行编辑c.编辑软件中未设置的关节点:在uesed points栏里的空隙处点击右键,选择add添加新的关节点,并编辑坐标点B.连接坐标点:两个坐标点连接就会形成一个人体的环节,程序有默认的常规的环节的连线,如大腿是髋关节点与膝关节点的连线。
出于分析的需要,需要在某些关节点之间建立连线,此时需要我们添加新的连接,方法如下:操作:将左键按住拖拽到右边的灰色区域(或者在其上右击后选择edit)New connections—编辑连接名(例如头-脚跟)—选择起始点(starting point)--line to –结束点/apply如果需要在单个点的周围划圈,则只需要选circle with radius,确定圆圈大小即可。
第十四章二维运动估计早期设计的机器视觉系统主要是针对静态场景的,为了满足更高级的应用需求,必须研究用于动态场景分析的机器视觉系统.动态场景分析视觉系统一般需要较大的存储空间和较快的计算速度,因为系统的输入是反应场景动态变化的图像序列,其包含的数据十分巨大.图像动态变化可能由摄象机运动、物体运动或光照改变引起,也可能由物体结构、大小或形状变化引起.为了简化分析,通常我们假设场景变化是由摄象机运动和物体运动引起的,并假设物体是刚性的.根据摄象机和场景是否运动将运动分析划分为四种模式:摄象机静止-物体静止,摄象机静止-物体运动,摄象机运动-物体静止,摄象机运动-物体运动,每一种模式需要不同的分析方法和算法。
摄象机静止-物体静止模式属于简单的静态场景分析.摄像机静止-场景运动是一类非常重要的动态场景分析,包括运动目标检测、目标运动特性估计等,主要用于预警、监视、目标跟踪等场合。
摄象机运动—物体静止是另一类非常重要的动态场景分析,包括基于运动的场景分析、理解,三维运动分析等,主要用于移动机器人视觉导航、目标自动锁定与识别等.在动态场景分析中,摄象机运动—物体运动是最一般的情况,也是最难的问题,目前对该问题研究的还很少.图像运动估计是动态场景分析的基础,现在已经成为计算机视觉新的研究热点。
根据所涉及的空间,将图像运动估计分为二维运动估计和三维运动估计,显然,这种划分不是十分严格,因为二维运动参数的求解有时需要三维空间的有关参数引导,而许多三维参数的求解需要以二维参数为基础。
本章主要讨论二维运动估计,三维运动估计和分析将在第十五章讨论。
14.1图像运动特征检测对许多应用来说,检测图像序列中相邻两帧图像的差异是非常重要的步骤.场景中任何可察觉的运动都会体现在场景图像序列的变化上,如能检测这种变化,就可以分析其运动特性.如果物体的运动限制在平行于图像平面的一个平面上,则可以得到物体运动特性定量参数的很好估计.对于三维运动,则只能得到物体空间运动的定性参数189190估计.场景中光照的变化也会引图像强度值的变化,有时会引起较大的变化.动态场景分析的许多技术都是基于对图像序列变化的检测.检测图像变化可以在不同的层次上进行,如像素、边缘或区域.在像素层次上要对所有可能的变化进行检测,以便在后处理阶段或更高层次上使用.14.1.1差分图像检测图像序列相邻两帧之间变化的最简单方法是直接比较两帧图像对应像素点的灰度值.在这种最简单的形式下,帧),,(j y x f 与帧),,(k y x f 之间的变化可用一个二值差分图像),(y x f DP jk 表示:⎩⎨⎧>-=其它如果0),,(),,(1),(T k y x f j y x f y x f DP jk (14.1)式中T 是阈值.在差分图像中,取值为1的像素点被认为是物体运动或光照变化的结果.这里假设帧与帧之间配准或套准得很好.图14.1和14.2示意了两种图像变化情况,一种是由于光照变化造成的图像变化,另一种是由于物体的运动产生的图像变化.需要指出,阈值在这里起着非常重要的作用.对于缓慢运动的物体和缓慢光强变化引起的图像变化,在一个给定的阈值下可能检测不到.(a) (b) (c) 图14.1 (a)和(b)是取自一个运动摄象机获取的静态场景图像序列的两帧图像,(c)是它们的差分图像(T=40)191(a) (b) (c)图14.2 (a)和(b)是取自光照变化的图像序列的两帧图像,(c)是它们的差分图像(T=80)(1) 尺度滤波器在实际中,使用上述差分方法计算的差分图像经常会含有许多噪声.一个简单噪声消除方法是使用尺度滤波器,滤掉小于某一尺度的连通成分,因为这些像素常常是由噪声产生的,留下大于某一尺度阈值的4-连通或8-连通成分,以便作进一步的分析.对于运动检测,这个滤波器非常有效.但也会将一些有用的信号滤掉,比如那些来自于缓慢运动或微小运动物体的信号.在图14.3中,我们给出了图14.1、14.2图像差分图像的尺度滤波结果.(a) (b)图14.3 (a)图14.1差分图像的尺度滤波结果(b)图14.2差分图像的尺度滤波结果(2) 鲁棒检测方法为了使图象变化检测更鲁棒,可以使用统计方法或基于强度分布的局部逼近方法来比较两帧图像之间的光强特性,比如使用第三章讨论过的似然比21222121)2(2σσμμσσλ*⎥⎦⎤⎢⎣⎡-++= (14.2)来进行两帧图像之间的比较,(式中μ和σ表示区域的平均灰度和方差),然后计算差分图像:⎩⎨⎧>=其它如果01),(T y x f DP jk λ (14.3)式中T 是阈值.对于许多真实场景,将似然比和尺度滤波组合起来使192用是非常有效的.上面讨论的似然比测试是基于区域服从均匀二阶统计的假设.如果使用小平面和二次平面来近似这些区域,似然比测试方法的性能还能有显著的提高.注意,似然比测试是在像素层次上检测相似度,,因此只能确定所考察的区域是否有同样的灰度特征;有关区域的相对强度信息则没有得到保留.使用似然比方法检测图像序列中的运动部分可能增加计算量。
(3) 累积差分图像缓慢运动物体在图像中的变化量是一个很小的量,尺度滤波器可能会将这些微小量当作噪声滤掉.当使用鲁棒检测方法时,因为是基于区域的变化检测,因此会使得检测小位移或缓慢运动物体的问题变得更加严重.解决这一问题的一种方法是累积差分图像方法(accumulative difference picture, ADP ),其基本思想是通过分析整个图像序列的变化(而不是仅仅分析两帧之间的变化)来检测小位移或缓慢运动物体.这种方法不仅能用来可靠检测微小运动或缓慢运动的物体,也可用来估计物体移动速度的大小和方向以及物体尺度的大小.累积差分图像可分为一阶累积差分图像(FADP )和二阶累积差分图像(SADP )。
一阶累积差分图像的形成过程如下:将图像序列的每一帧图像与一幅参考图像进行比较,当差值大于某一阈值时,就在累积差分图像中加1.通常将图像序列的第一帧作为参考图像,并且置累积差分图像0FADP 的初始值为0.这样,在第k 帧图像上的累积差分图像),(y x FADP k 为:⎩⎨⎧-==-其它),(),(00),(11y x DP y x FADP k y x FADP k k k (14.4)图14.4是利用累积差分图像检测的结果示意图.二阶差分图像的构造为:对应于第n 帧)110(>=n N n 且,,, 的二阶差分图像在),(y x 位置的值为“1”,表明在这个位置上第1-n 帧和第n 帧的一阶差分图像FADP 具有不同的符号.⎩⎨⎧>≠=-其它01),(),(1),(1k y x SADP y x SADP y x SADP k k k (14.5)累积差分图像具有许多性质,可以用于描述物体运动的总体参数[Jain](a) (b) (c)图14.4 (a) 第一帧图像(参考图像),(b) 第三帧后的累积差分图像,(c) 最后一帧后的累积差分图像用于运动检测的差分图像的最大特点是它的简单性,但差分图像极易受噪声污染.照明和摄象机位置的改变,以及摄象机的电子噪声,都会产生很多错误数据.将似然比和尺度滤波器组合起来能消除大部分摄象机噪声.照明的改变会给所有基于光强的运动检测方法带来问题,这些问题有可能在后期的分析和理解层次上得以解决.图像序列各帧之间的错误套准也会导致错误数据,如果套准错误不十分严重,则累积差分图像还是可以消除这些错误数据的.必须强调,在像素层次上检测不相似度只能通过检测光强变化来实现.在动态场景分析中,这是最低层次的分析.在检测完像素变化以后,还需要通过其它的处理过程来解释这些变化.经验表明,差分图像最有效的应用是对图像进行概略处理,以便将解释的注意力引向场景中出现“活动”的区域.场景中事件的粗略信息也可由差分图像中的某些特征来提取.14.1.2时变边缘检测我们知道,边缘在静态场景图像分析中起着十分重要的作用,因此有理由推测时变边缘在动态场景图像分析中也是非常重要的.在进行图像分割与匹配方法中,人们将精力主要集中在静态特征与运动特征之间的匹配.实际上,这些静态特征是运动信息提取的最大障碍.如果直接检测运动特征,那么完成匹配所需的计算量可以根本上大大减小.一条边缘运动后仍然是一条边缘.运动边缘是通过逻辑“与”算193194子对时间和空间梯度进行组合来实现,其中的“与”算子可以由乘法来完成.这样,图像E x y t (,,)中一点的时变边缘由下式给出:),(),,(),,(),,(),,(y x D t y x E dtt y x dE dS t y x dE t y x E t ⋅=⋅=(14.6) 式中dS t y x dE ),,(和dt t y x dE ),,(分别是点),,(t y x 的光强在空间和时间上的梯度值.各种传统的边缘检测方法可用于计算空间梯度,而简单的差分方法可用于计算时间梯度.在大多数情况下,边缘算法很有效.为了克服遗漏缓慢运动边缘和弱边缘的问题,可将一个阈值作用于上式的乘积,而不是一阶差分,然后使用边缘检测器或一阶检测边缘器算出它们的时间梯度[Jain],如图14.5和14.6所示.由图14.6可见,这种边缘检测方法将对有清晰边缘的缓慢运动和以适当速度运动的弱边缘响应.这种检测方法的另一个重要特点是不需要对任何位移大小作出假设.当边缘的运动非常大时,检测器的性能也是十分满意的.(a) (b) (c)图14.5 时变边缘检测器运行结果示意图195图14.6 边缘检测器的性能曲线14.1.3 运动对应性 已知一个图像序列,我们可以分析并确定序列中每一帧图像上的特征点.为估计图像运动特性,必须在图像各帧之间建立这些特征点的对应关系.运动图像的对应问题与立体视觉中的对应问题相似,不过立体视觉使用的约束主要是外极线约束,运动图像对应问题使用的是其它类型的约束.下面讨论一种约束传播方法来解决对应问题.(1) 松弛标记标记(labeling)是指将一组已知标记分配给场景中对应的各个物体。
标记问题可以表示为如图14.7所示的形式.每一个节点表示一个标记区域(或物体),连结节点的弧线表示区域间的关系.假定每一个节点上有一个处理器,在每一个节点上定义集合R ,C ,L 和P .集合R 包含节点间所有可能的关系(relation );集合C 表示这些关系的相容性(compatibility ),相容性将有助于对关系R 进行约束以及对图像中每个区域的标记进行约束;集合L 包含所有指定给该节点的标记;集合P 表示计算过程中赋予节点的所有可能的层次.假定在第一次迭代中,节点i 的可能的标记集合1i P 对所有的i 来说都是L ,换句话说,所有节点的初始标记是所有可能的标记.在第k 次迭代过程中,标记算196法将从“k i P ”中除去无效标记,得到1+k i P .去除标记的依据建立在节点当前标记、该节点与其它节点的关系、各种约束等基础上,因此,每一个处理器都有足够的信息来独立地对其标记集合k i P 进行细化.这样,所有的处理器就有可能同步工作.需要指出,在任一时刻,处理器只使用能直接可得到的信息,这就是说,只使用从属于该节点对应区域的信息.但是,每一次迭代都通过它的邻节点或关联节点把效应传播给其它没有直接关系的节点,即每一次迭代都会增加节点的影响圈.图14.7 并行传播示意图对大多数应用来说,在标记过程开始前,有关物体的一些知识是可以得到的.分割或标记前进行的其它处理过程又常常可以提供用于细化节点初始集合P i 的知识.标记过程可以进一步细化这些标记集合,以使得每一个区域对应唯一的标记.下面考虑一种与上面所述的标记问题稍微不同的标记问题.基于某种酉关系,标记集合1i P 可以分配给一个区域。