关于OV7725程序移植OV7670总结
用了三天的时间,终于搞定了程序的移植。也是第一次移植stm32程序。
最终的移植成功版本,改了SCCB通信、FIFO读写时序、寄存器配置、引脚修改的一些地方。
一、移植过程中SCCB通信遇到的问题
1.由于野火的OV7725摄像头内置上拉电阻,所以在配置时SDA和SDL都被设置成了Mode_OD (开漏模式),但是战舰带的OV7670摄像头并没有内置上拉电阻,所以不能用开漏模式,否则不能正常输出高电平,SDA线也不会被主机拉高。
于是参考了战舰的例程。战舰对SCL线设置为了PP(推挽输出模式),SDA线的输出则需要切换。如下:
在战舰的例程上进行修改时,由于需要修改一些IO口,所以需要把这句改掉。我尝试用这样的手法修改:
发现并不可行。查询网络,原因可能是在运行中途修改管脚模式时,由于32的LCKK:锁密钥,并不能直接修改管脚工作模式。我们选择对底层寄存器进行操作。。
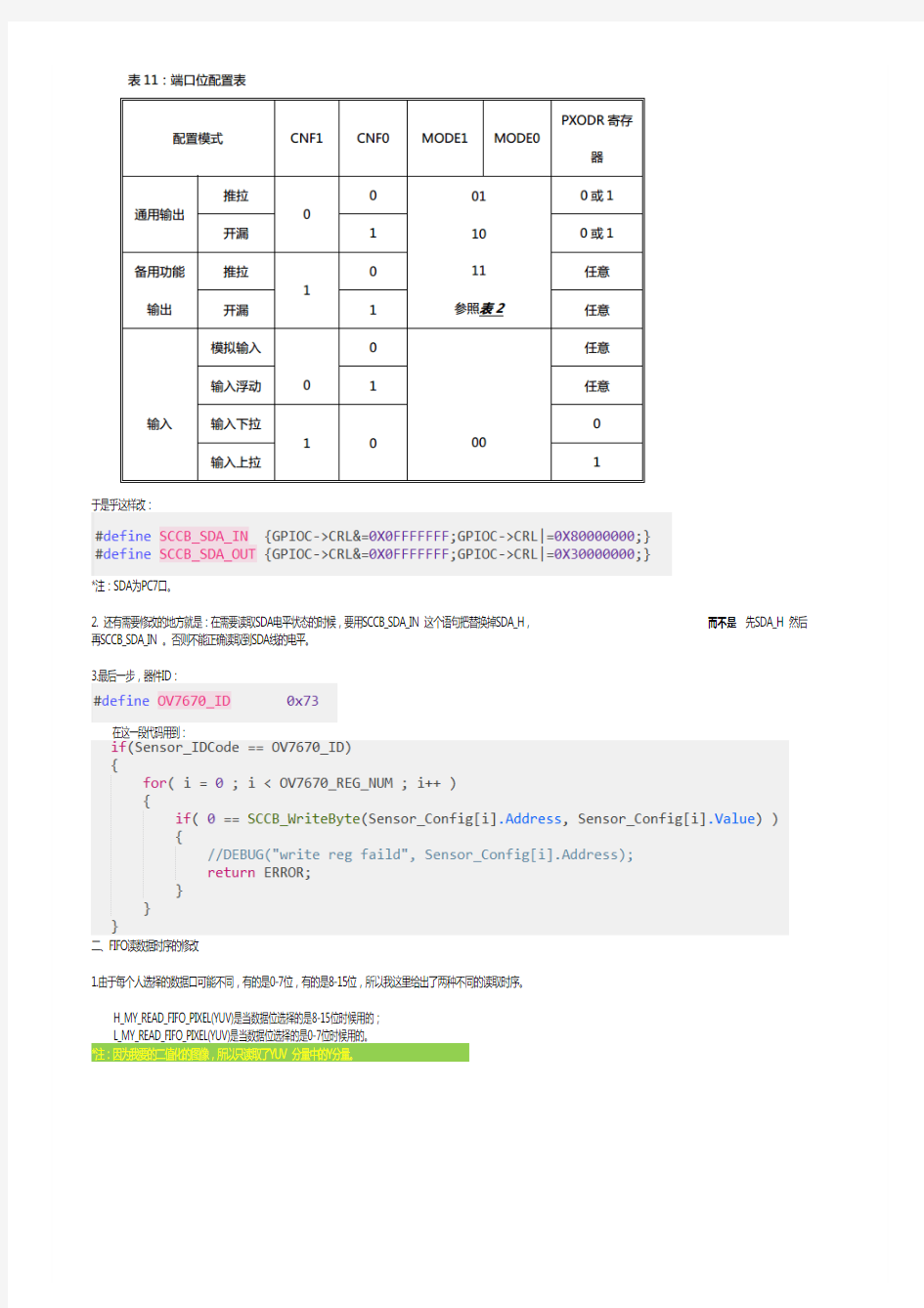
于是乎这样改:
*注:SDA为PC7口。
2. 还有需要修改的地方就是:在需要读取SDA电平状态的时候,要用SCCB_SDA_IN 这个语句把替换掉SDA_H,而不是先SDA_H 然后再SCCB_SDA_IN 。否则不能正确读取到SDA线的电平。
3.最后一步,器件ID:
在这一段代码用到:
二、FIFO读数据时序的修改
1.由于每个人选择的数据口可能不同,有的是0-7位,有的是8-15位,所以我这里给出了两种不同的读取时序。
H_MY_READ_FIFO_PIXEL(YUV)是当数据位选择的是8-15位时候用的;
L_MY_READ_FIFO_PIXEL(YUV)是当数据位选择的是0-7位时候用的。
*注:因为我要的二值化的图像,所以只读取了YUV 分量中的Y分量。
下面这段代码是读取RGB565的:
三、寄存器的配置
1. 我用的YUV,没有给每位寄存器重定义。所以要结合Datasheet自行查看。 /*以下为 YUV参数设置*/
{0x12, 0x10},
{0x3a, 0x14},
{0x3d, 0x80},
//0 0 : Y U Y V (3a:14 3d:80)
//0 1 : Y V Y U (3a:14 3d:81)
//1 0 : U Y V Y (3a:18 3d:80)
//1 1 : V Y U Y (3a:18 3d:81)
{0x67, 0x11}, //手工设置 U
{0x68, 0xFF}, //手工设置 V
{0x40, 0xC0}, //YUV输出
//输出窗口设置
{0x32, 0x80}, //HREF
{0x17, 0x16}, //HSTART
{0x18, 0x04},//HSTOP
{0x19, 0x02},//VSTRT
{0x1a, 0x7a},//0x7a, VSTOP
{0x03, 0x0a},//0x0a, VREF
{0x0c, 0x0c},
{0x15, 0x00},
{0x3e, 0x00},//10
{0x70, 0x00},
{0x71, 0x01},
{0x72, 0x11},
{0x73, 0x09},//
{0xa2, 0x02},//15
{0x11, 0x00},//时钟分频设置,0,不分频.
{0x7a, 0x20},
{0x7b, 0x1c},
{0x7c, 0x28},
{0x7d, 0x3c},//20
{0x7e, 0x55},
{0x7f, 0x68},
{0x80, 0x76},
{0x81, 0x80},
{0x82, 0x88},
{0x83, 0x8f},
{0x84, 0x96},
{0x85, 0xa3},
{0x86, 0xaf},
{0x87, 0xc4},//30
{0x88, 0xd7},
{0x89, 0xe8},
{0x13, 0xe0},
{0x00, 0x00},//AGC
{0x10, 0x00},
{0x0d, 0x00},
{0x14, 0x20},//0x38, limit the max gain {0xa5, 0x05},
{0xab, 0x07},
{0x24, 0x75},//40
{0x25, 0x63},
{0x26, 0xA5},
{0x9f, 0x78},
{0xa0, 0x68},
{0xa1, 0x03},//0x0b,
{0xa6, 0xdf},//0xd8,
{0xa7, 0xdf},//0xd8,
{0xa8, 0xf0},
{0xa9, 0x90},
{0xaa, 0x94},//50
{0x13, 0xe5},
{0x0e, 0x61},
{0x0f, 0x4b},
{0x16, 0x02},
{0x1e, 0x27},//图像输出镜像控制.0x07, {0x21, 0x02},
{0x22, 0x91},
{0x29, 0x07},
{0x33, 0x0b},
{0x35, 0x0b},//60
{0x37, 0x1d},
{0x38, 0x71},
{0x39, 0x2a},
{0x3c, 0x78},
{0x4d, 0x40},
{0x4e, 0x20},
{0x69, 0x5d},
{0x6b, 0x40},//PLL*4=48Mhz
{0x74, 0x19},
{0x8d, 0x4f},
{0x8e, 0x00},//70
{0x8f, 0x00},
{0x90, 0x00},
{0x91, 0x00},
{0x92, 0x00},//0x19,//0x66
{0x96, 0x00},
{0x9a, 0x80},
{0xb0, 0x84},
{0xb1, 0x0c},
{0xb2, 0x0e},
{0xb3, 0x82},//80
{0xb8, 0x0a},
{0x43, 0x14},
{0x44, 0xf0},
{0x45, 0x34},
{0x46, 0x58},
{0x47, 0x28},
{0x48, 0x3a},
{0x59, 0x88},
{0x5a, 0x88},
{0x5b, 0x44},//90
{0x5c, 0x67},
{0x5d, 0x49},
{0x5e, 0x0e},
{0x64, 0x04},
{0x65, 0x20},
{0x66, 0x05},
{0x94, 0x04},
{0x95, 0x08},
{0x6c, 0x0a},
{0x6d, 0x55},
{0x4f, 0x80},
{0x50, 0x80},
{0x51, 0x00},
{0x52, 0x22},
{0x53, 0x5e},
{0x54, 0x80},
//{0x54, 0x40},//110
{0x09, 0x03},//驱动能力最大
{0x6e, 0x11},//100
{0x6f, 0x9f},//0x9e for advance AWB {0x55, 0x00},//亮度
{0x56, 0x40},//对比度
{0x57, 0x80},//0x40
2.RGB565的配置:
/*以下为OV7670 QVGA RGB565参数 */ {0x3a, 0x04},//
{0x40, 0x10},
{0x12, 0x14},
{0x32, 0x80},
{0x17, 0x16},
{0x18, 0x04},//5
{0x19, 0x02},
{0x1a, 0x7b},//0x7a,
{0x03, 0x06},//0x0a,
{0x0c, 0x0c},
{0x15, 0x02},
{0x3e, 0x00},//10
{0x70, 0x00},
{0x71, 0x01},
{0x72, 0x11},
{0x73, 0x09},//
{0xa2, 0x02},//15
{0x11, 0x00},
{0x7a, 0x20},
{0x7b, 0x1c},
{0x7c, 0x28},
{0x7d, 0x3c},//20
{0x7e, 0x55},
{0x7f, 0x68},
{0x80, 0x76},
{0x81, 0x80},
{0x82, 0x88},
{0x83, 0x8f},
{0x84, 0x96},
{0x85, 0xa3},
{0x86, 0xaf},
{0x87, 0xc4},//30
{0x88, 0xd7},
{0x89, 0xe8},
{0x13, 0xe0},
{0x00, 0x00},//AGC
{0x10, 0x00},
{0x0d, 0x00},
{0x14, 0x30},//0x38, limit the max gain {0xa5, 0x05},
{0xab, 0x07},
{0x24, 0x75},//40
{0x25, 0x63},
{0x26, 0xA5},
{0x9f, 0x78},
{0xa0, 0x68},
{0xa1, 0x03},//0x0b,
{0xa6, 0xdf},//0xd8,
{0xa7, 0xdf},//0xd8,
{0xa8, 0xf0},
{0xa9, 0x90},
{0xaa, 0x94},//50
{0x13, 0xf5},
{0x0e, 0x61},
{0x0f, 0x4b},
{0x16, 0x02},
{0x1e, 0x07},//0x07,
{0x21, 0x02},
{0x22, 0x91},
{0x29, 0x07},
{0x33, 0x0b},
{0x35, 0x0b},//60
{0x37, 0x1d},
{0x38, 0x71},
{0x39, 0x2a},
{0x3c, 0x78},
{0x4d, 0x40},
{0x4e, 0x20},
{0x69, 0x5d},
{0x6b, 0x40},//PLL
{0x74, 0x19},
{0x8d, 0x4f},
{0x8e, 0x00},//70
{0x8f, 0x00},
{0x90, 0x00},
{0x91, 0x00},
{0x92, 0x00},//0x19,//0x66
{0x96, 0x00},
{0x9a, 0x80},
{0xb0, 0x84},
{0xb1, 0x0c},
{0xb2, 0x0e},
{0xb3, 0x82},//80
{0xb8, 0x0a},
{0x43, 0x14},
{0x44, 0xf0},
{0x45, 0x34},
{0x46, 0x58},
{0x47, 0x28},
{0x48, 0x3a},
{0x59, 0x88},
{0x5a, 0x88},
{0x5b, 0x44},//90
{0x5c, 0x67},
{0x5d, 0x49},
{0x5e, 0x0e},
{0x64, 0x04},
{0x65, 0x20},
{0x66, 0x05},
{0x94, 0x04},
{0x95, 0x08},
{0x6c, 0x0a},
{0x6d, 0x55},
{0x4f, 0x80},
{0x50, 0x80},
{0x51, 0x00},
{0x52, 0x22},
{0x53, 0x5e},
{0x54, 0x80},
//{0x54, 0x40},//110
{0x6e, 0x11},//100
{0x6f, 0x9f},//0x9e for advance AWB {0x55, 0x00},//亮度
{0x56, 0x45},//对比度
{0x57, 0x80},//0x40
四、移植过程中引脚的修改
1.外部中断的修改
我需要修改的引脚有FIFO-OE / FIFO-RCLK / FIIFO-RRST / SCL / SDA / VSYNC / WRST
其他的不用多说,VSYNC需要修改的地方还是蛮多的~(我用的外部中断口是PB13)
其中需要注意的是:macOV7670_VSYNC_EXTI_IRQ这个,Pin13口需要用这个,具体用哪个要查书。
2. AFIO时钟的开启
当你需要的外部中断不是32自带的外部中断引脚时候,必须开启AFIO时钟。
当把GPIO用作EXTI外部中断或使用重映射功能的时候,必须开启AFIO时钟,而在使用默认复用功能的时候,就不必开启AFIO时钟了。
六轴接口版说明 欢迎使用六轴接口版。 本接口版可以直接与软件MACH3 KCAM4或泡沫切割软件或其他并口连接的软件使用。 特点: 1:输出信号电平可以高低转换,适应共阳共阴步进电机驱动板,使电机工作更精确。 2:用TTL74244芯片做驱动和隔离,适应电脑并口宽电压,且保护电脑端口。 3:工作电压驱动电压在一起,节约又方便,可以用电脑USB提供5V或接开关电源。 4:脉宽调制电机PWM直接控制,可以用在变频器或司服电机主轴调速。 5:两个继电器输出功率接口,可以用来控制主轴正反转或水泵。。 6:5个输入端,信号整型输入,可以接限位或光电开关外或接按钮。 7:6个DC3排线插座可以方便连接驱动器。输入输出都有HT插座,可以方便连接其他步进电机或司服电机驱动。 8:使能可以在板上外接控制。 9:面积90*135毫米。
说明,以下事例是以本论坛驱动为适应进行的设置,如果是其他驱动请作参考! 电源使用: 本接口板可以用交流或直流电源。如果驱动是小于30V可以用接口板提供驱动电源。AC12-24V插座上接入交流15-20V,或(24V开关电源)经过接口板上整流后可以提供12V 和5V接口板工作电压,可以提供给8435或6016驱动电源。。整流后电压纹波峰值不超过30V。考虑到电网电压的波动,变压器副边空载输出电压建议不能小于60VAC。采用较低的电源电压会使电机高速运行力矩下降,但有助于驱动器降低温升和增加低速时的运行平稳性。 建议使用线性电源(变压器),大于60W,线性电源功率大,电源稳,价格低是首选。不能使用自藕变压器。如果用工厂机床变压器,初级有220和380,次级有6。3,12。24。36可以组合成多个电压。如:初级接220,次级接6。3和36,交流就是30V。初级接220,次级接6。3和24,交流电压就是18V左右了。如果初级接380,用电源220,次级的电压就降了1/3。 如果驱动器要用30V以上单独供电,接口板就可以用个小功率変压器提供12V或5V 工作电压,也可以用电脑USB提供5V电压。 以上供电方式请单独使用。用USB提供5V就不要在AC12-24插座上插电源。USB提供5V风扇不会转,也不能控制12V继电器。
2款典型的摄像头OV7670与OV7620,从其特性和性能等角度,剖析摄像头的特点。 OV7670和OV7620都是彩色摄像头,其感光像素为640*480的数字摄像头。他们之间有很多相似的参数,但是最大的不同就是,OV7670的像素输出格式为RGB565,而OV7620的像素输出格式为YUV422,这个不同点直接决定了其在智能车摄像头中的地位。在继续进行分析之前,我们先了解一点摄像头的小知识。 ///---------------------------------------华丽的分割线-------------------------------------------/// 【摄像头小知识】RGB565与YUV422的区别 1.什么是RGB565 众所周知,RGB是组成彩色的三基色,要想显示一个像素的颜色,每个像素都需要3个BYTE 数据的R、G、B来表示,那一副320*240的彩色图像,就需要320*240*3=230400B=225KB 的数据来存储,这样看来,存储图像的空间开销是极大的。而在一个像素RGB中,G分量的比重是最大的,R和B的比重相对小一些,因此人们又想出了用R:G:B=5:6:5的比例关系,来表示一个像素,这样一来,一个像素仅仅需要2个BYTE就可以表示其彩色信息(这个2个BYTE中,R占5bit,G占6bit,B占5bit),320*240的彩色图像的存储空间也由225KB 减小到150KB。 2.RGB565是怎么存储的 摄像头的数据是在每一个PCLK的上升沿去读取的。若摄像头默认输出的格式为RGB565,那么摄像头在上电之后,每触发2个PCLK,读取2个字节,才是一个像素。在这个像素中,RGB的分布如下图所示:在第一个字节(First BYTE)中,Y[7..3]为R[4..0],Y[2..0]为G[5..3];在第二个字节(Second BYTE)中,Y[7..5]为G[2..0],Y[4..0]为B[4..0]
Minigui V1.3.3在uClinux中的移植经验总结 [转] 经过一个星期的努力,终于将Minigui移植到我的ARM7开发板上了,在这个过程中我遇到了很多困难和问题网络,通过以前很多前辈在网络上分享的经验,终于取得成功,也让我更加体会到只有大家都互相帮助,才能使大家都受益。所以基于这一点,我将我的移植过程分享给大家,并且写得尽量详细点,希望给大家后来者少走一些弯路。有不对的地方,欢迎大家板砖! 首先说明一下我的开发平台,我用的是Samsung S3C44B0X芯片的开发板,已经移植好的uClinux操作系FrameBuffer驱动。我的uClinux安装在"/s3c44b0fu/uClinux-dist"目录下,交叉编译工具安装在"/usr/local/a 下。 具体步骤: 一. 从网站下载 libminigui-1.3.3.tar.gz, mde-1.3.0.tar.gz, mg-samples-1.3.0.tar.gz和minigui-res-1.3.3.tar.g 件,并将这四个文件保存到交叉编译环境的目录下,因为我的arm-elf-gcc交叉编译工具安装在"/usr/local/arm-以将minigui的四个压缩包同样拷贝到"/usr/local/arm-elf"目录下. 二. 在终端中输入"cd /usr/local/arm-elf",进入minigui的四个压缩文件所在目录,然后分别执行"tar zxvf xxxx 四个压缩包解压缩.解压后生成libminigui-1.3.3, mde-1.3.0, mg-samples-1.3.0和minigui-res-1.3.3四个文件 三. 1) 进入minigui-res-1.3.3文件夹内,修改config.linux,在prefix = $(TOPDIR)/usr/local/后添加我们的交叉arm-elf,即prefix = $(TOPDIR)/usr/local/arm-elf. 2) cd minigui-res-1.3.3 3) make install 四. cd mde-1.3.0 ./configure make cd mg-samples-1.3.0 ./configure make 五. 1) 编写交叉编译minigui函数库的配置脚本domain.sh. domain.sh的具体内容为: #!/bin/sh rm config.cache config.status -f CC=arm-elf-gcc \ CFLAGS="-I/s3c44b0fu/uClinux-dist/uClibc/include -Dlinux -D__linux__ -D__uClinux__ -Dunix " \ LDFLAGS="-Wl,-elf2flt -static -Wl,-move-rodata -Wl,-L/s3c44b0fu/uClinux-dist/lib/uClibc/lib -Wl,-L/s3c44b dist/linux-2.4.x/lib -Wl,-lc -Wl,-lm" \ ./configure --prefix=/usr/local/arm-elf \ --build=i686-pc-linux-gnu \ --host=arm-elf-linux \
摄像头模组基础扫盲 手机摄像头常用的结构如下图37.1所示,主要包括镜头,基座,传感器以及PCB部分。 图37.1 CCM(compact camera module)种类 1.FF(fixed focus)定焦摄像头 目前使用最多的摄像头,主要是应用在30万和130万像素的手机产品。 2.MF(micro focus)两档变焦摄像头 主要用于130万和200万像素的手机产品,主要用于远景和近景,远景拍摄风景,近景拍摄名片等带有磁条码的物体。 3.AF(auto focus)自动变焦摄像头 主要用于高像素手机,具有MF功能,用于200万和300万像素手机产品。 4.ZOOM 自动数码变焦摄像头 主要用于更高像素的要求,300万以上的像素品质。 Lens部分 对于lens来说,其作用就是滤去不可见光,让可见光进入,并投射到传感器上,所以lens相当于一个带通滤波器。
CMOS Sensor部分 对于现在来说,sensor主要分为两类,一类是CMOS,一类是CCD,而且现在CMOS是一个趋势。 对于镜头来讲,一个镜头只能适用于一种传感器,且一般镜头的尺寸应该和sensor的尺寸一致。 对于sensor来说,现在仍然延续着Bayer阵列的使用,如下图37.2所示,图37.3展示了工作流程,光照à电荷à弱电流àRGB信号àYUV信号。 图37.2 图37.3
图37.4 图37.4展示了sensor的工作原理,这和OV7670以及OV7725完全相同。 像素部分 那么对于像素部分,我们常常听到30万像素,120万像素等等,这些代表着什么意思呢?图37.5解释了这些名词。 图37.5 那么由上面的介绍,可以得出,我们以30万像素为例,30万像素~= 640 * 480 = 3 0_7200;可见所谓的像素数也就是一帧图像所具有的像素点数,我们可以联想图像处理的相关知识,这里的像素点数的值,也就是我们常说的灰度值。像素数越高,当然显示的图像的质量越好,图像越清晰,但相应的对存储也提出了一定的要求,在图像处理中,我们也会听到一个概念,
Minigui在ARM开发板上的移植过程 一、题外话: 为了感谢国人在开源世界颇具影响力的为数不多Minigui的开发者们的辛勤劳动(希望为数不多这个这个词若干年后我们不再提^_^),也为答谢飞漫公司和魏永明先生对开源项目在中国的运作模式的有意义的探索, 也为自己在感慨、敬佩之余尽一点微波之力,就将借工作之便并参考众多网友的体会,将一点移植心得整理出来,希望公司不介意。考虑到每个人接触linux的起点不同,所以下文档按步就班说得比较详细(说得不好听点是罗嗦,^_^,如果您熟悉相关部分,请略过,希望不要当面说俺写的罗嗦,呵). 二、特别声明: 本文的移植过程主要以minigui1.2.3为基础。 本文中提到的注意可能是您容易忽视,而又要引起您注意的地方或者由于理解上的差异而容易造成交叉编译失败的地方。 本文中需要修改的地方以红色字体标注,而添加或者修改的地方以蓝色标注,需要您执行命令的地方以粉红标注(html格式颜色不显,我又懒蛋得写HTML标签,建议您下载附件中的PDF文档)。 另外,本文中提到的脚本编写和修改都请在linux环境下手工编写,不要在windows下或者直接从下面拷贝,免得出现错误。 三、硬件平台: CSB226-PXA250,Cogent ep7312,此文档以CSB226-PXA250参考开发板的移植过程为主来说明. LCD屏幕特性:640x480,支持8bpp. 支持标准PC键盘、鼠标 四、软件环境: 主机:Redhat7.2 目标板:采用umon作为boot loader, 开发环境和运行的内核是Montavista Profession Edition 2.1. 目标板(以下称为target)采用NFS的方式将根文件系统挂接到开发主机(以下称为host)上,其路径为:/opt/hardhat/devkit/arm/xscale_le/target,目标板上以控制台下的framebuffer 方式运行。 host和target都以root身份登陆。 将minigui库文件原代码libminigui1.2.3.tar.gz,资源文件minigui-fonts.1.2.0.tar.gz, minigui-imetabs-1.1.0.tar.gz, minigui-res-1.2.0.tar.gz放在主机任意目录下,而考虑到演示程序编译后没有相应的安装脚本,将源代码包mde-1.2.3..tar.gz放在了 /opt/hardhat/devkit/arm/xscale_le/target/root下面。首先用类似tar zxf liminigui1.2.3.tar.gz命令将所有的压缩包解开。 五、libminigui1.2.3及资源文件的移植: 1、libminigui1.2.3文件的移植: 它移植主要定义交叉编译器已经编译后的目标库和头文件的存放路径,参考给出的交叉编译例子编写了交叉编译脚本build-pxa250 #!/bin/sh
控制工程基础课程内容总结 一.控制、控制系统的一般概念 1.反馈(闭环)控制原理 概念:基于负反馈基础上的检测偏差用以纠正偏差的控制原理(P4) 控制系统的工作原理:(P4) a.通过测量元件检测输出信号的实际值 b.将实际值与输入信号进行比较得出偏差信号。 c.利用偏差信号产生的控制调节作用去消除偏差。 控制系统的基本组成和术语 控制目标、控制系统、控制结果三部分组成;(P2) 信号、反馈、控制是控制工程的三个要素。(P5) 反馈是把取出输出信号送回到输入端,并与出入信号进行比较产生偏差信号的过程。(P4) 负反馈:反馈的信号是与输入信号相减,时产生的偏差越来越小。 正反馈:反之即得 控制过程的物理本质:任何控制系统的控制过程都是一种信息处理使能量(或物质、或信息)按预定的规律转移、传递的过程。(P6) 2.基本控制策略:开环控制、闭环控制、复合控制(P6—P7) 如果系统只是根据输入信号和干扰信号进行控制,而输入端和输出端之间不存在反馈回路,输出信号在整个控制过程中对系统的控制不产生任何影响,这样的控制方式称为开环控制。(数控机床的进给运动) 如果系统的输入端和输出端之间存在反馈回路,输出量对控制过程产生直接影响,这种系统称为闭环控制系统。 同时采用闭环控制和开环控制的控制方式称为复合控制。 3.线性系统的重要性质:叠加原理(P10) 控制系统的基本要求:稳定,快速,精确,健壮。(P11) 4.瞬态响应和稳态响应;零输入响应、零状态响应(P70) 二.系统数学模型及其建模 何谓数学建模?(P15)何谓负载效应?(P21)何谓线性化?(P19)如何线性化?(P19—P20) (一).传递函数 1.传递函数的概念(P35)与性质(P36)零点、极点、特征多项式和特征方程(P36) 2.典型环节的传递函数(P38—P46) 3.控制系统的传递函数 开环传递函数(P56),开环增益(P57),系统型号(P96) 主令输入、扰动输入下的闭环传递函数(P57) 主令输入、扰动输入下的偏差、误差传递函数(P57—P58)
TB6560AHQ三轴步进电机驱动板使用说明 该板外观结构图如下图: 基本功能: 1、全双桥MOSFET驱动,耐压40V,驱动电流额定3A,峰值3.5A,内置温度保护及过流保护功 能。 2、输出标准的三轴驱动,并有第四轴扩展接口,方便用户自由扩展第四轴。 3、配有15针手控接口,可以方便的连接手控手柄。 4、自动半流控制功能,在无驱动脉冲时电机半流锁定,可有效保护步进电机,节省电能,延长步 进电机使用寿命。 5、四档细分设置:整步、1/2、1/8、1/16,三个拨码开关可分别设定三个轴的细分步数。 6、限位扩展接口,可以连接限位开关,在每个轴到达限位位置时自动急停,使您能放心使用而不 必担心损坏雕刻机。 7、主轴控制接口,可控制主轴继电器的开合,从而控制主轴的启停。 8、单电源输入,只需输入一组12~40V供电电源就可工作,板上集成有5V电源转换电路。 特殊配置: 1、电脑并口信号驱动能力弱,输出电平不稳定,且不同的主板输出的高电平电压也不统一。本驱 动板有74HC14芯片对并口信号整形,使输出电平统一并提高驱动能力,避免步进电机失步、不响应等情况的发生。
2、电脑并口和驱动电源之间有光耦隔离,防止驱动电源流入电脑损坏电脑主板、CPU、硬盘等。 3、黑色正品超大散热片,可有效解决主芯片的发热问题。 4、有极性电容除三个大容量的外,其余全部用钽电容,保证稳定的性能和使用寿命。 接口及其定义: 1、并口控制的25个脚定义如下: PIN1:CKE E轴脉冲 PIN2:CKA A轴脉冲 PIN3:CW A A轴方向 PIN4:CKB B轴脉冲 PIN5:CWB B轴方向 PIN6:CKC C轴脉冲 PIN7:CWC C轴方向 PIN8:空 PIN9:空 PIN10:DIN1 限位1 PIN11:DIN2 限位2 PIN12:DIN3 限位3 PIN13:DIN4 限位4 PIN14:CWE E轴方向 PIN15:空 PIN16:EN 所有轴使能 PIN17:RL Y 继电器控制 PIN18~25:GND 接地 2、手控1~PIN15定义如下 PIN1:CKA A轴脉冲 PIN2:CW A A轴方向 PIN3:CKB B脉冲 PIN4:CWB B方向 PIN5:CKC C轴脉冲 PIN6:CWC C轴方向 PIN7~8:空 PIN9:CKE E轴脉冲 PIN10:CWE E轴方向 PIN11:EN 使能 PIN12:MOTO 电机控制 PIN13:VCC 电源正 PIN14:空 PIN15:GND 地
教你怎么用MACH3 与电机驱动板制作雕刻机 技术交流qq:49972461 Email:lixiaosch@https://www.doczj.com/doc/1615021870.html,
另外关于CAD转G代码的:《CAXA数控车与MACH3攻略》与《MACH3常用设置》 我上传到附件中,有兴趣朋友可以下载,是论坛上几个大侠发的,我整理成WORD格式,以供初次接触MACH3做雕刻机的朋友,有个参考的资料。 文件名: MACH3常用设置.pdf 描述: MACH3常用设置.pdf 下载地址: https://www.doczj.com/doc/1615021870.html,/files/e19d1623-84b8-11df-a758-0015c55db73d/ 文件名: CAXA数控车与MACH3攻略 .pdf 描述: CAXA数控车与MACH3攻略 .pdf 下载地址: https://www.doczj.com/doc/1615021870.html,/files/e1b7c2cf-84b8-11df-b524-0015c55db73d/ 文件名: Mach3中文.rar 描述: Mach3中文.rar 下载地址: https://www.doczj.com/doc/1615021870.html,/files/2371819e-8bf2-11df-9d3b-0015c55db73d/
文件名: Mach3.rar 描述: Mach3.rar 下载地址: https://www.doczj.com/doc/1615021870.html,/files/2392ea82-8bf2-11df-9e16-0015c55db73d/ [本帖最后由 lixiaosch 于 2010-8-4 14:25 编辑] 附件 连接图.JPG(108.24 KB) 2010-4-25 12:55
关于OV7725程序移植OV7670总结 用了三天的时间,终于搞定了程序的移植。也是第一次移植stm32程序。 最终的移植成功版本,改了SCCB通信、FIFO读写时序、寄存器配置、引脚修改的一些地方。 一、移植过程中SCCB通信遇到的问题 1.由于野火的OV7725摄像头内置上拉电阻,所以在配置时SDA和SDL都被设置成了Mode_OD (开漏模式),但是战舰带的OV7670摄像头并没有内置上拉电阻,所以不能用开漏模式,否则不能正常输出高电平,SDA线也不会被主机拉高。 于是参考了战舰的例程。战舰对SCL线设置为了PP(推挽输出模式),SDA线的输出则需要切换。如下: 在战舰的例程上进行修改时,由于需要修改一些IO口,所以需要把这句改掉。我尝试用这样的手法修改: 发现并不可行。查询网络,原因可能是在运行中途修改管脚模式时,由于32的LCKK:锁密钥,并不能直接修改管脚工作模式。我们选择对底层寄存器进行操作。。
于是乎这样改: *注:SDA为PC7口。 2. 还有需要修改的地方就是:在需要读取SDA电平状态的时候,要用SCCB_SDA_IN 这个语句把替换掉SDA_H,而不是先SDA_H 然后再SCCB_SDA_IN 。否则不能正确读取到SDA线的电平。 3.最后一步,器件ID: 在这一段代码用到: 二、FIFO读数据时序的修改 1.由于每个人选择的数据口可能不同,有的是0-7位,有的是8-15位,所以我这里给出了两种不同的读取时序。 H_MY_READ_FIFO_PIXEL(YUV)是当数据位选择的是8-15位时候用的; L_MY_READ_FIFO_PIXEL(YUV)是当数据位选择的是0-7位时候用的。 *注:因为我要的二值化的图像,所以只读取了YUV 分量中的Y分量。
课程设计成果说明书 题目:Linux下基于minigui的软键盘程序调试 学生姓名:苏腾云/王润志/蒋强/游寺豪/沈龙/陈阳狮学号:0800403220/0800403222/081311128 081311101/081311136/0800403109 学院:机电工程学院 班级:AC08电信 指导教师:赵秋亮老师 浙江海洋学院教务处 2011年07月01日
浙江海洋学院课程设计成绩评定表 2009 —2010学年第2 学期 学院机电工程班级 AC08电信专业电子信息工程 学生姓名(学号) 苏腾云/王润志 游世豪/蒋强 沈龙/陈阳狮 课程设计 名称嵌入式系统课程设计 题目MiniGUI移植 指导教师评语 指导教师签名: 年月日 答辩评语及成绩 答辩小组教师签名: 年月日
附2: 浙江海洋学院课程设计任务书 2010 —2011学年第2 学期 学院机电工程班级 AC08电信专业电子信息工程 学生姓名(学号) 苏腾云/王润志 游世豪/蒋强 沈龙/陈阳狮 课程 名称 嵌入式系统课程设计 设计 题目 Linux下基于minigui的软键盘程序调试 完成 期限 自 2011 年 6 月 20 日至 2011 年 7 月 1 日共 2 周 设计依据本次设计所需知识 1.S3C2410的基本知识 2.Linux系统常用命令 3.linux编辑器VI的使用方法 4.MiniGUI的基本知识 5.MiniGUI的移植方法 设计要求及主要内容1.熟悉linux系统的常用操作命令 2.熟悉VI(或GVIM)的操作方法 3.完成虚拟机VM的安装 4.完成虚拟机VM下的Linux(RedHat9.0)的安装 5.完成交叉编译环境的建立 6.完成PC机环境下minigui的安装与配置,QVFB的安装 7.完成minniGUI在S3C2410A上的移植 8.利用示例程序包中程序验证移植结果,结果能在LCD与QVFB上正常显示 9.调试基于minigui的软键盘程序,并能在QVFB和LCD上显示。10.录制设计结果演示和解说视频 11.完成课程设计说明书的撰写。撰写格式要求按照《机电工程学院毕业设计文本规范》。 参考资料[1]. ARM9嵌入式系统设计――基于S3C2410与Linux.徐英德等.北京航空航天大学出版社.2007年. [2]. 嵌入式系统实验指导书.自编. [3]. 实验指导书-EL-ARM-830型教学实验系统(ARM9).北京精仪达盛科技有限公司. [4]. Minigui实验指导书(for S3C2410).北京精仪达盛科技有限公司. [5]. Minigui编程指南.飞漫公司. [6]. FTP资源:172.16.51.6 用户名:dx 密码:1234. 在/ARM目录下。 指导教 师签字 日期
TB6560HQ T3-V3 2.5A三轴步进电机驱动器 使用说明
TB6560HQ T3-V3 (1) 2.5A三轴步进电机驱动器 (1) 使用说明 (1) 一、概述 (3) 二、TB6560AHQ的优势 (3) 2.1、在低转速运行系统中的应用优势 (3) 2.2、在高转速运行系统中的应用优势 (4) 三、TB6560T3V1 三轴驱动器性能简介 (5) 四、TB6560T3V1总体接线图: (6) 五、并口各个引脚信号输出定义: (6) 六、第四轴扩展接法: (8) 七、限位开关的连接方法: (9) 八、电流、细分、衰减模式的调节: (10) 8.1、电流衰减调节 (10) 8.2、细分调节 (11) 8.3、电流设置 (12) 九、各种步进电机接法 (12) 十、步进电机和电源的选择: (14) 十一、MACH3软件使用方法 (15) 11.1、Mach3的启动: (15) 11.2、Mach3软件的基本设置: (16) 11.3、限位开关的mach3设置: (20) 11.4、G代码的运行: (20) 11.5、如何使用MACH3的手控界面: (23) 十二、常见问题解答: (23) 十三、联系我们: (25)
一、概述 电脑雕刻机是新一代集雕刻、铣削加工为一体的多功能雕刻机床。该机床主要适用于加工各种图案丰富多彩的模具如:压花板、鞋底模、钮扣模、拉链模、图案文字印模和烫金模、仪器模具、玻璃模具等。也适用于广告业如:司牌、标牌、建筑模型、徽章、证章、铭板、展板、会标、门牌、指示牌、工艺装璜、家具装饰等。还可以用于人像、风景、书法刻字、印章等艺术类平面雕刻、阴文、阳文轮廓、浮雕制作。 本站生产的5轴雕刻机驱动器,采用高性能专用微步距控制芯片TB6560,开放式微电脑可根据用户要求把控制功能设计到驱动板中,组成最小控制系统。该控制板适合驱动中小型的任何两相或四相混合式步进电机。并具有电流0.6A、1.2A、1.8A、2.5A 4档可调功能,支持MACH2、MACH3系列软件,支持KCAM4系列软件,广泛应用与模具加工、平面雕刻等应用领域。由于采用新型的双极性恒流斩波技术,使电机运行精度高, 振动小, 噪声低,运行平稳,安全方便,是广大DIY爱好者和雕刻机厂家的首选产品。 二、TB6560AHQ的优势 2.1、在低转速运行系统中的应用优势 低转速运行系统,是指时钟频率不高、以小电流驱动为主的系统,比如转速为每分钟几转到100转,用户在此种应用条件下如使用传统的驱动方案,要么因集成芯片细分太低,而使低速振动偏大;要么不得不选择细分很高的驱动器,使成本不必要的增加。 TB6560AHQ驱动芯片的优势: (1)电机振动小噪音低:因为芯片自带2、4、16细分可选,足够满足每分钟从几到近千转的应用要求。 (2)嵌入式驱动器发热少:芯片自带的散热面积足以单独支持小电流驱动的散热要求。 (3)支持各种步进电机选型:客户可选择力矩稍大的混合式或永磁式步进电机,使
PC104对OV7670寄存器的读写 摘要:Ominisrision 公司的新型摄像头模组OV7670,具有体积小、输出图 像格式多、接口方便、寄存器可读写等特点,是嵌入式系统中图像采集的理想 选择。通过设置OV7670 的寄存器的值,可以更好地实现对摄像头的控制,得 到更加理想的图像。本文介绍了PC104 系统对OV7670 摄像头模组寄存器读写的过程及编程方法。关键词:OV7670;图像采集;PC104;SCCB 嵌入式系统中的图像采集是进行图像处理的基础,只有在采集时就进行前端的处理和控制,才能减少图像中的噪声,为后续的图像处理提供良好的数据。OV7670 开放了 控制寄存器,用户可以通过SCCB 总线来实现读写操作,可以设置图像输出格式、控制曝光等,为具体的应用场景提供了更底层的支持。正确的读写寄存器 就成为获得图像的第一步。1 OV7670 摄像头模组简介OV7670 CAMERACHIPTM 图像传感器,体积小、工作电压低,提供单片VGA 摄像头 和影像处理器的所有功能。通过SCCB 总线控制,可以输出整帧、子采样、取 窗口等方式的各种分辨率8 位影响数据。该产品VGA 图像最高达到30 帧/秒。用户可以完全控制图像质量、数据格式和传输方式。所有图像处理功能过程包 括伽玛曲线、白平衡、饱和度、色度等都可以通过SCCB 接口编程。OmmiVision 图像传感器应用独有的传感器技术,通过减少或消除光学或电子 缺陷如固定图案噪声、托尾、浮散等,提高图像质量,得到清晰的稳定的彩色 图像。功能框图如图1 所示。为了保证图像采集的连续性和完整性,外加一个384K,8 位的FIFO,AL422 为图像采集和处理作缓冲。OV7670 与AL422 的 连接如图2 所示。 2 两线SCCB SCCB(Serial Camera Control Bus),即串行摄像机控制总线,是
MiniGUI及其移植与应用 权宁一 (东北电力大学信息工程学院吉林吉林132012) 【摘要】:本文介绍了MiniGUI系统在嵌入式开发中的移植与应用。对MiniGUI图形软件的特点、体系结构、工作模式做了叙述,描述了MiniGUI在uc_osⅡ环境中的移植方法,MiniGUI应用软件的开发思想和流程,并对其应用领域做了介绍。 【关键词】:MiniGUI,移植,控件,消息循环 1、MiniGUI概述 随着嵌入式系统在工业控制、信息家电、智能手持终端、办公自动化等领域中的广泛应用,人们对产品的图形用户接口(GUI)的需求越来越强烈。图形美观、界面友好的GUI已广泛应用在3G手机、PDA、智能传感器、工控终端等嵌入式设备上,其中比较成熟的GUI产品有:MiniGUI、MicroWindows、OpenGUI、TinyXWindow、QT/Embedded。 MiniGUI最初是清华大学为数控机床研发计算机控制系统时根据需要独立开发的图形用户接口,它具有代码小巧、实时性好、高效稳定、易于裁减的特点,非常适合应用于嵌入式实时控制系统。MiniGUI可以运行在任何一种具有线程支持的POSIX兼容系统上,同时也是国内出现的最早的遵循LGPL条约的自由软件之一。MiniGUI有三种运行模式:⑴MiniGUI-Threads:运行在MiniGUI-Threads的程序可在不同的线程中建立多个窗口,但所有的窗口在一个进程中运行,可以配合的操作系统有ucosii、vxworks、linux。⑵MiniGUI-lite:每个程序是单独的进程,每个进程可建立多个窗口,只有具备完整unix特性的操作系统才可运行这一模式。⑶MiniGUI-standalone,可以以独立进程方式运行而不需要其它任何支持,这种方式几乎可以支持所有操作系统。MiniGUI具有以下特点:⑴小巧可订制,包含全部功能的库文件只有300k。⑵高稳定性,可移植性好。⑶界面皮肤支持,用户可通过皮肤支持获得华丽外观界面。⑷提供了完备的多窗口机制及消息传递机制。⑸丰富的控件资源,包括菜单、进度条、列表框、按钮、工具栏等。(6)多种键盘布局支持,多字符集及多字体支持,常见的图像文件支持。⑺多种汉字输入法支持,windows资源文件支持。 2、MiniGUI的结构特点与移植方式 2.1MiniGUI的体系结构 图1MiniGUI结构体系 MiniGUI采用了分层结构设计思想,共分为GAL、IAL、Pthread层,MiniGUI核心层,用户接口层三层结构。GAL为图形抽象层,提供了底层操作系统的图形接口,配置MiniGUI选用GAL引擎,就可使用framebuffer作为MiniGUI图形发生引擎;IAL为输入抽象层,它提供了输入设备如键盘鼠标等的驱动,可将输入设备的输入事件最终映射为GUI系统API层的消息事件。有了GAL、IAL可以把底层硬件及操作系统进行完全屏蔽,方便MiniGUI的移植。同时,用户可在XWindow系统中调试运行自己的产品,通过重新编译就可使软件运行在特定的硬件平台上。Pthread(POSIXthread)是提供内核级线程支持的c库函数。MiniGUI核心层为中间层,包含了窗口系统所需要的各个功能模块,详见图1。用户接口层API对于不同的平台是一致统一的,底层系统已被完全屏蔽,用户不必考虑输入设备及绘图细节,只需使用标准C语言进行类似win32库函数调用即可。2.2MiniGUI工作模式 MiniGUI采用微客户/服务器机制,通过消息队列和多线程之间的同步机制来实现。在多线程环境中各线程之间有信息交互的需要,依据"先来先服务"的原则,依次处理每个线程的请求。一个线程首先在desktop微服务器的消息队列中放置一条消息,要求建立窗口,然后进入等待状态。当desktop处于空闲状态时可以立即处理这一请求。最后,desktop返回处理结果,唤醒等待的线程。 MiniGUI启动3个重要的微服务器,它们分别为desktop、parser、timer。其中desktop用于管理MiniGUI窗口中的所有主窗口;parser线程用于采集键盘鼠标事件并转换成API层消息;timer线程用来触发定时器事件。 2.3MiniGUI的移植 嵌入式系统的结构框架从底层到上层依次为:硬件平台、嵌入式操作系统、MiniGUI、用户程序,其中uclinux与uc/OS-II为常用的操作系统,下面以uc/OS-II为例介绍MiniGUI的移植。uc/OS-II具有实时性强、代码简单的特点,在教学及工业实时控制领域得到了广泛应用。MiniGUIforuc/OS-II的配置及编译可在windows环境中的ADS开发平台中进行,编译完成之后生成一个静态库MiniGUI_lib,最终生成包括uc/OS-II、MiniGUI、应用程序在内的可执行映像文件,将映像文件固化写入硬件平台即完成MiniGUI的移植。在编译之前需要进行以下工作:设置MiniGUI配置头文件、确定头文件路径、选定编译规则。MiniGUI配置头文件中参数_AUTO_IAL是模拟键盘鼠标选项;_COM-MM_IAL是uc/OS-II通用输入引擎;_GB_SUPPORT是字符集支持;_USE_OWN_MALLOC为内存管理函数支持;_USE_OWN_STDIO为函数支持。编译规则设置中_MiniGU-I_LIB_声明编译MiniGUI_LIB库;_uc/OS-II_声明目标操作系统;-EC允许隐性类型转换;_NOLINUX_表示非linux系统。3、基于MiniGUI的软件设计开发思想 3.1MiniGUI开发流程 uc/OS-II初始化后创建任务main_task,在该任务中创建POSIX协议线程main_thread,main_thread中调用函数mg_main_task,进入MiniGUI入口MiniGUI_entry,进而调用应用程序入口函数MiniGUIMain,执行用户软件及窗口过程函数。MiniGUI应用程序必须包括的头文件有:common.h--定义了宏及数据类型;minigui.h--定义了接口函数及杂项函数;window.h--定义了窗口的宏及数据类型;control.h--定义了系统内部控件。 MiniGUIMain()是程序的入口点函数,一般用户程序先创建一个主窗口或非模式对话框,在主窗口内建立若干控件,然后建立消息队列,进入窗口消息循环,响应各类消息。通过调用Cre-ateMainWindow()函数创建主窗口,函数返回窗口句柄。函数调用时需给MAINWINCREATE结构体指针赋值,确定主窗口的各项属性值。调用ShowWindow()函数将主窗口进行显(下转第71页 )
硬件平台:ASM9260开发板 Linux内核:linux-2.6 作者:孙怀亚 qq:413983254 交叉编译器:arm-none-linux-gnueabi-gcc MiniGUI交叉编译过程--------------------------------------------------------- 在开始之前,先准备好交叉编译过程中所需要的几个库文件: 1.jpegsrc.v6b.tar.gz 2.libpng-1.2.18.tar.bz2 3.tslib-1. 4.tar.gz 4.libminigui-gpl-3.0.12.tar.gz 5.minigui-res-be-3.0.12.tar.gz 6.zlib-1.2.3.tar.gz 7.freetype-1.3.1.tar.Gz 8.mg-samples-3.0.12.tar.gz 如果下面配置或命令有错,一般是由于拷贝制作word文档时,软件自动首字母变成大写或自动加空格的原因,切记要改回来!!!!! 第一步:首先建立新目录 [root@localhost /]# mkdir -p /root/cross 将开头所述的文件全部拷贝至 /root/cross目录下 第二步:安装 zlib 库,这个是后面的库的编译基础。 [root@localhost cross]# tar zxvf zlib-1.2.3.tar.gz 由于 zlib 库的configure 脚本不支持交叉编译选项,只好自己手动临时把 gcc 修改成指向我们的交叉编译器arm-none-linux-gnueabi-gcc [root@localhost cross]# cd /usr/bin/ [root@localhost bin]# mv gcc gcc_back [root@localhost bin]# ln -s /usr/local/arm/arm-2008q3-linux/bin/arm-none-linux-gnueabi-gcc ./gcc [root@localhost bin]# mv ld ld_back [root@localhost bin]# ln -s /usr/local/arm/arm-2008q3-linux/bin/arm-none-linux-gnueabi-ld ./ld 修改完成后回到 /root/cross/zlib-1.2.3 目录下: [root@localhost bin]# cd /root/cross/zlib-1.2.3 [root@localhost zlib-1.2.3]# ./configure --prefix= /usr/local/arm/arm-2008q3-linux/arm-none-linux-gnueabi --shared
热工基础读书报告 摘要:能源是提供能量的源泉,是人类社会生存和发展的源泉。热工的基础课程的目的是认识和掌握能源开发和利用的基本规律,为合理的开发和利用能源奠定理论基础。本文就热工基础这门课程的学习进行了以下三方面的总结。第一:说明这门课程的研究目的和研究方法;第二:简单总结各章节的主要内容和知识框架体系;第三:从个人角度论述一下学习这门课程的心得体会及意见。 关键词:能量热工学研究方法心得体会
正文 自然界蕴藏着丰富的能源,大部分能源是以热能的形式或者转换为热能的形式予以利用。因此,人们从自然界获得的的能源主要是热能。为了更好地直接利用热能,必须研究热量的传递规律。 1 热工基础的研究目的和研究方法 1.1 研究目的 热的利用方式主要有直接利用和间接利用两种。前者如利用热能加热、蒸煮、冶炼、供暖等直接用热量为人们服务。后者如通过个证热机把热能转化为机械能或者其他形式的能量供生产和生活使用。 能量的转换和传递是能量利用中的核心问题,而热工基础正是基于实际应用而用来研究能量传递和转换的科学。 传热学就是研究热量传递过程规律的学科,为了更好地间接利用热能,必须研究热能和其他能量形式间相互转换的规律。工程热力学就是研究热能与机械能间相互转换的规律及方法的学科。由工程热力学和传热学共同构成的热工学理论基础就是主要研究热能在工程上有效利用的规律和方法的学科。 作为一门基于实际应用而产生的学科,其最终还是要回归到实际的应用中,这样一来,就要加强对典型的热工设备的学习和掌握。 1.2研究方法 热力学的研究方法有两种:宏观研究方法和微观研究方法。宏观研究方法是以热力学第一定律和热力学第二定律等基本定律为基础,针对具体问题采用抽象、概括、理想化简化处理的方法,抽出共性,
Mach3Mill,铣床主界面。 界面上的内容非常多,乍一看感觉很复杂,这也是我第一次接触Mach家族软件的第一印象。 经过一段时间的使用和研究后发现,实际上只要进行简单的几个设置之后就可以初步的运行了。待我慢慢道来。 打开软件后的第一步就要确定用于计算机床进给系统所使用的长度单位是公制还是英制,也就是毫米还是英寸。 打开Config菜单,选择第一项Select Native Units。
随后会弹出一个提示窗口,不用理睬直接点击OK。 (提示内容是告诉用户这里的长度单位的确定与G程序中使用的长度单位没有关系,这里确定机床步进(伺服)电机,在进给运动时所使用的长度单位。) 之后就会出现单位定义窗口了。 我使用了mm‘s,也就是毫米,因为我使用的丝杠是2.5mm导程(螺距)的,是公制的的丝杠。所以这样可以方便的计算出步进电机的转速,而不存在单位换
算出现的误差。 按下ok后即可。 第二步,开始设定你的Mach接口,定义并口引脚功能。这也是Mach中设定最关键的部分,机床是否能够正常的运行就靠这里的设定。 Config菜单-Ports and Pins项 弹出Ports & Pins对话框,此对话框内有多个标签窗口。首先看到的是Port Setup and Axis Selection标签窗口。
窗口中有以下选项是我们要关注的,Port #1中定义了PC主板上唯一的一个并口地址,这个地址在主板BIOS中已经定义一般为默认,无需要更改,Port Enable打勾有效。Port #2定义如果主板上有第二个并口,则定义了第二个并口的地址。 Kernel Speed核心频率定义了mach系统的最高运行速度,决定了机床进给速度的极限,无论是步进电机还是伺服电机最高脉冲频率决定了其转速,所以Kernel Speed的频率限制其最大脉冲频率。 一般步进电机的转速比较低,极限转速大约700转,标准脉冲是每转200个,如果使用细分驱动器达到8细分的话就是1600个脉冲转一圈。每分钟 700×1600/60秒=18666.66HZ/秒。如果步进马达要达到700转就要使用高于18666.33HZ/秒的核心频率,应该选择系统中的25000HZ,就可以了。 Port Setup and Axis Selection标签窗口其他选项可暂时不用设定。
基于Mach3控制板的3D打印机设计 3D打印制造是现代兴起的累积成型技术,是当代制造业方面具有前景的技术之一。3D打印之前常用于设计制造模具,打印零件等领域的制造模式,现在常用于直接生产某种产品,3D打印技术的出现和兴起,使其逐渐成为一项新型的主流加工技术。文章以Mach3控制板为基础,对3D打印机的框架结构、3D 打印机的传动部分、3D打印机控制主板部分进行设计分析,讲述了控制系统的主控板,详细说明了Mach3主机平台的工作原理。同时通过对设计过程中出现的一些问题进行分析对3D打印机设计时存在的问题进行了合理的规避。 标签:3D打印机;Mach3控制板;结构设计;参数计算 Abstract:3D printing manufacturing is a modern cumulative forming technology,which is one of the promising technologies in the contemporary manufacturing industry. 3D printing used to design and manufacture mould,printing parts and other fields of manufacturing mode,now often used to directly produce a product,3D printing technology and the emergence and rise,making it gradually become a new mainstream processing technology. Based on Mach3 control board,this paper designs and analyzes the frame structure of 3D printer,the drive part of 3D printer and the control motherboard of 3D printer,and describes the main control board of the control system. The working principle of Mach3 host platform is explained in detail. At the same time,through the analysis of some problems in the design process,the problems existing in the design of 3D printer are reasonably avoided. Keywords:3D printer;Mach3 control board;structural design;parameter calculation 引言 伴着时代进步和社会科技发展,制造业设计加工规模的發展迅速猛进,市场竞争也愈来愈大,3D打印机成为加工制造业的绝对优势,一些主要的计算机技术(CAD、并行工程)等技术的出现给产品的设计与研发带来了不容小觑的方便[1]。目前国内3D打印技术还在探索和初步应用阶段,需要更长时间的实践来实现质的飞跃,飞机钛合金构件的打印、基于粉末床的SLS技术的打印技术、重型金属的3D打印开启了制造业的新时代,象征我国3D打印技术的发展拥有无限的创新空间[2]。 3D打印技术的仿真性强、效率高,成本便宜,简单易于操作等优点给人们带来了巨大的方便。但是,在用计算机软件设计和加工制造零件时,由于3D打印设备自身局限性的存在,使得零件在设计和制造加工方面有很大的关联,因此加工工艺等是影响零件的重要因素之一。基于Mach3D打印技术的出现,在一定程度上,能够降低复杂结构零件的加工难度,改变某些复杂零件在传统工艺上无