弧长法(Riks method)是目前结构非线性分析中数值计算最稳定、计算效率最高且最可靠的迭代控制方法之一,它有效地分析结构非线性前后屈曲及屈曲路径跟踪使其享誉"结构界"。大多数商业有限元软件(如ABAQUS、ANSYS等)也都将其纳入计算模块,作为一名工科生,机械式地"Step by Step"点击这些商业软件对话框的时候需"知其然,
知其所以然",否则必将"Rubbish in,Rubbish out"。
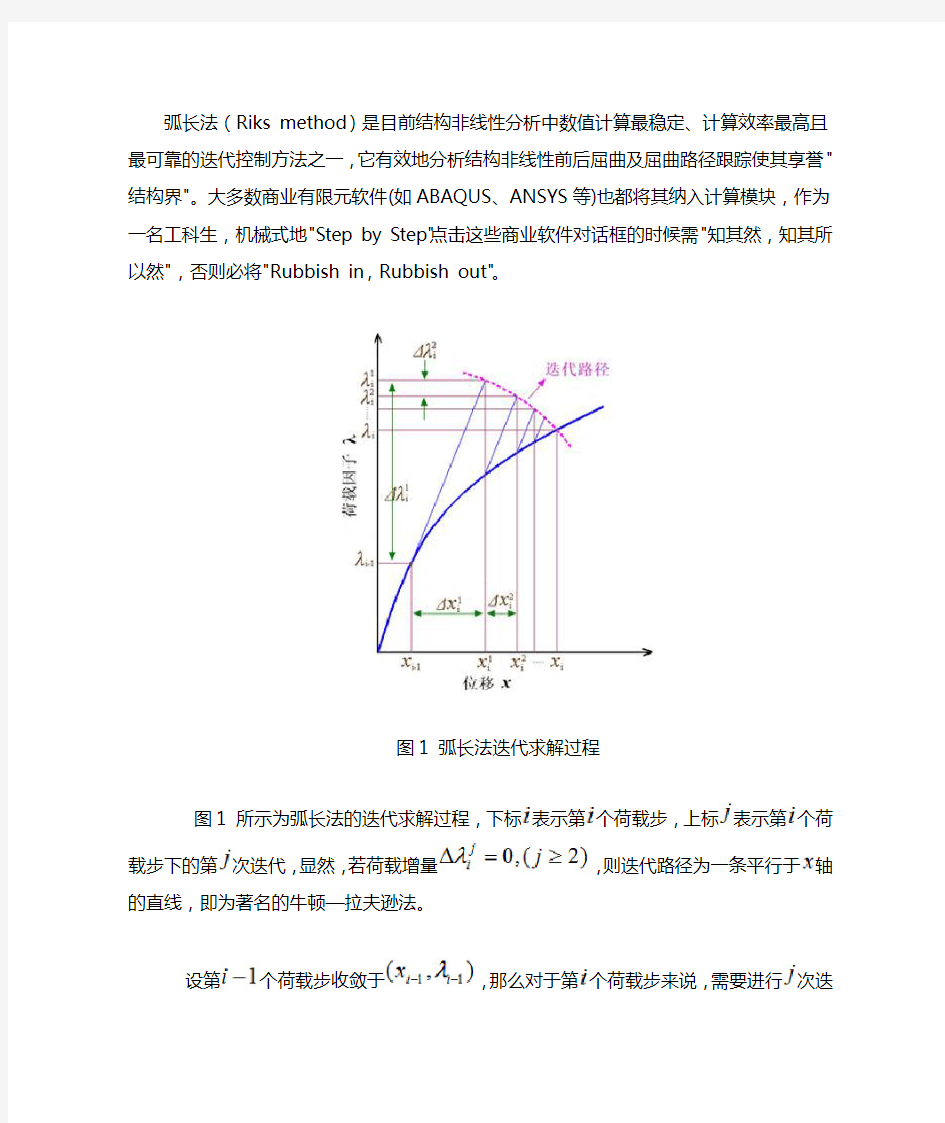
图1 弧长法迭代求解过程
图1 所示为弧长法的迭代求解过程,下标表示第个荷载步,上标表示第个荷载步下的第次迭代,显然,若荷载增量
,则迭代路径为一条平行于轴的直线,即为著名
的牛顿—拉夫逊法。
设第个荷载步收敛于,那么对于第个荷载步来说,需要进行次迭代才能达到新的收敛点。外部参照力,在ABAQUS需要用户以外荷载的形式输入,因此,作用在结构上的真实力大小为。由于牛顿—拉夫逊法在迭代过程中,以荷载控制(或位移控制)时,荷载增量步(或位移增量步)为常数,它无法越过极值点得到完整的荷载—位移曲线,事实上,也只有变化的荷载增量步才能使求解过程越过极值点。从图1中可以看出,弧长法的荷载增量步是变化的,可以自动控制荷载,但这又使原方程组增加了一个多余的未知量,因此需要额外补充一个控制方程,即:
(1)
该控制方程说明,其迭代路径是以上一个荷载步收敛点
为圆心半径为的圆弧,所以称为弧长法。通常用户需指定初始弧长半径或固定的弧长半径,当设定了初始弧长半径时,根据收敛速率,一般按式(2)计算,其中为荷载步期望收敛迭代次数,一般取6, 为上一荷载步的迭代次数,大于10时取10。
(2)
1. 当时,根据上一个荷载步收敛结束时的构形,得到用于第个荷载步收敛计算的切线刚度矩阵,即图1中的蓝色平行线的斜率。通过式(2)可得相应的切线位移。
(3)
(4)
(5)
很容易由式(5)求得,但不能确定其符号,而的符号决定了跟踪分析是向前还是返回,因此非常重要。很多学者提出了不同的确定方法,Murray j.Clarke(1993),A Study of Incremental-iterative Strategies
for Non-linear Analysis这篇文章详细地介绍了这些方法。在ABAQUS中,符号按下式(6)确定:
(6)
2. 当时,为了简化的求解过程,可以切平面法求解,即用垂直于切线的向量代替圆弧,即:
需要补充的关系式为:
最后需要说明的是,假若考虑材料塑性行为,则每个迭代步的切线刚度矩阵应以当前迭代步的构形为准,即图1中的蓝色切线不再平行。
屈曲分析的过程说明: 屈曲分析是一种用于确定结构开始变得不稳定时的临介荷载和屈 曲结构发生屈曲响应时的模态形状的技术。ANSYS提供两种结构屈曲荷载和屈曲模态分析方法:非线性屈曲分析和特征值屈曲分析。 非线性屈曲分析是在大变形效应开关打开的情况下的一种非线性 静力学分析,该分析过程一直进行到结构的极限荷载或最大荷载。非 线性屈曲分析的方法是,逐步地施加一个恒定的荷载增量,直到解开 始发散为止。尤其重要的是,要一个足够小的荷载增量,来使荷载达 到预期的临界屈曲荷载。若荷载增量太大,则屈曲分析所得到的屈曲 荷载就可能不准确,在这种情况下打开自动时间步长功能,有助于避 免这类问题,打开自动时间步长功能,ANSYS程序将自动寻找屈曲荷载。 特征值屈曲分析步骤为: 1.建模 2.获得静力解:与一般静力学分析过程一致,但必须激活预应 力影响,通常只施加一个单位荷载就行了 3.获得特征屈曲解: A.进入求解 B.定义分析类型 C.定义分析选项 D.定义荷载步选项
E.求解 4.扩展解 之后就可以察看结果了 示例1: !ansys7.0有限元分析实用教程 !3.命令流求解 !ANSYS命令流: !Eigenvalue Buckling FINISH!这两行命令清除当前数据/CLEAR /TITLE,Eigenvalue Buckling Analysis /PREP7!进入前处理器 ET,1,BEAM3!选择单元 R,1,100,833.333,10!定义实常数 MP,EX,1,200000!弹性模量 MP,PRXY,1,0.3!泊松比 K,1,0,0!创建梁实体模型 K,2,0,100 L,1,2!创建直线 ESIZE,10!单元边长为1mm
摘要 运动目标检测方法是研究如何完成对视频图像序列中感兴趣的运动目标区域的“准确定位”问题。光流场指图像灰度模式的表面运动,它可以反映视频相邻帧之间的运动信息,因而可以用于运动目标的检测。MATLAB这种语言可移植性好、可扩展性强,再加上其中有丰富的图像处理函数,所以利用MATLAB 软件来用光流法对运动目标的检测中具有很大的优势。本设计主要可以借助matlab软件编写程序,运用Horn-Schunck算法对图像前后两帧进行处理,画出图像的光流场。而图像的光流场每个像素都有一个运动矢量,因此可以反映相邻帧之间的运动,分析图像的光流场就可以得出图像中的运动目标的运动情况。 关键字:光流法;Horn-Schunck算法;matlab
目录 1光流法的设计目的 (1) 2光流法的原理 (1) 2.1光流法的介绍 (1) 2.1.1光流与光流场的概念 (1) 2.1光流法检测运动目标的原理 (2) 2.1.1光流场计算的基本原理 (2) 2.2.2基于梯度的光流场算法 (2) 2.2.3Horn-Schunck算法 (3) 2.2.4光流法检测运动目标物体的基本原理概述 (5) 3光流法的程序具体实现 (6) 3.1源代码 (6) 3.1.1求解光流场函数 (6) 3.1.2求导函数 (9) 3.1.3高斯滤波函数 (9) 3.1.4平滑性约束条件函数 (10) 3.1.5画图函数 (10) 4仿真图及分析 (12) 结论 (13) 参考文献 (14)
1 光流法的设计目的 数字图像处理,就是用数字计算机及其他有关数字技术,对图像进行处理,以达到预期的目的。随着计算机的发展,图像处理技术在许多领域得到了广泛应用,数字图像处理已成为电子信息、通信、计算机、自动化、信号处理等专业的重要课程。 数字图像处理课程设计是在学习完数字图像处理的相关理论后,进行的综合性训练课程,其目的是:使学生进一步巩固数字图像处理的基本概念、理论、分析方法和实现方法;增强学生应用Matlab编写数字图像处理的应用程序及分析、解决实际问题的能力;尝试所学的内容解决实际工程问题,培养学生的工程实践能力。 运动目标检测是数字图像处理技术的一个主要部分,近些年来,随着多媒体技术的迅猛发展和计算机性能的不断提高,动态图像处理技术日益受到人们的青睞,并且取得了丰硕的成果,广泛应用于交通管理、军事目标跟踪、生物医学等领域。 因此,基于光流法,实现运动目标的检测是本文的研究对象。结合图书馆书籍、网上资料以及现有期刊杂志,初步建立起运动目标检测的整体思路和方法。 2 光流法的原理 2.1 光流法的介绍 2.1.1 光流与光流场的概念 光流是指空间运动物体在观测成像面上的像素运动的瞬时速度,它利用图像序列像素强度数据的时域变化和相关性来确定各自像素位置的“运动”,即反映图像灰度在时间上的变化与景物中物体结构及其运动的关系。将二维图像平面特定坐标点上的灰度瞬时变化率定义为光流矢量。视觉心理学认为人与被观察物体
行政法基本理论 第一节行政法的概述 一、行政法的概念 行政法是国家重要的部门法之一,是调整行政关系以及在此基础上产生的监督行政关系的法律规范的总称,或者说是调整因行政主体行使其职权而发生的各种社会关系的法律规范的总称。行政法渊源包括一般渊源和特殊渊源。 行政法的一般渊源,包括:(1)宪法。(2)法律。(3)行政法规、地方性法规与自治条例、单行条例。(4)部门规章和地方政府规章。 行政法的特殊渊源,包括:(1)法律解释,包括最高权力机关的解释、国家司法机关的解释、中央国家行政机关的解释、地方国家权力机关的解释和行政机关的解释。(2)国际条约与协定。 二、行政法的特点及基本原则 (一)行政法的特点 1.行政法没有统一、完整的法典。 2.行政法规、规章等形式表现的行政法规范易于变动。 3.行政法的实体性规范与程序性规范常常交织在一起,并往往共存于一个法律文件之中。 (二)行政法的基本原则 1.合法性原则 合法性原则是指行政权的存在、行使必须依据法律、符合法律,不得与法律相抵触,它在行政法中具有不可替代的地位。 2.合理性原则 合理性原则是行政法治原则的另一个重要组成部分,指行政行为的内容要客观、适度、合乎理性,其产生的主要原因是由于行政自由裁量权的存在。它要求行政机关必须合理地行使自由裁量权。 3.应急性原则 应急性原则是现代法治原则的重要内容,指在特殊的紧急情况下,出于国家安全、社会秩序或公共利益的需要,行政机关可以采取没有明确法律依据的与通常状态下法律规定相抵
触的措施。它是合理性原则的例外,但是应急性原则并非排斥任何的法律控制,不受任何限制的行政应急权力同样是行政法治原则所不容许的。 第二节行政法律关系 一、行政法律关系的概念及特征 行政法律关系是指行政法调整的具有行政法律权利义务内容的行政关系。 其具有以下特征:(1)主体的恒定性和不可转化性。(2)意志的单方性。(3)内容具有法定性、不对等性、统一性和不可自由处分性。(4)争议解决的特殊性。 二、行政法律关系的主体 行政法律关系主体亦称行政法律关系当事人,指行政法律关系中权利的享有者和义务的承担者,包括行政主体和行政相对方。 (一)行政主体 行政主体是指依法能以自己的名义代表国家对外行使行政职权并独立参加行政诉讼的组织,即行政管理过程中的管理者,具体包括行政机关和法律、法规授权的组织(公务组织)。行政主体具有以下特征:(1)行政主体是一种组织,而不是个人。(2)行政主体是依法拥有行政职权的组织,是行政权的归属者。(3)行政主体有权在法律法规规定的范围内代表国家并独立行使职权。(4)行政主体能以自己的名义独立参加诉讼。 (二)行政相对人 行政相对人是指行政法律关系中与行政主体相对应的另一方当事人,即行政主体行政行为影响其权益的个人、组织。行政相对人是行政法律关系中的一方主体。行政相对人包括:(1)国家行政机关在内的国家机关。(2)我国公民、法人或其他组织。(3)我国境内的外国人、无国籍人、外国组织。 行政相对人的法律地位:(1)行政相对人是行政主体行政管理的对象。(2)行政相对人也是行政管理的参与人。(3)行政相对人在监督行政法律关系中可以转化为救济对象和监督主体。 三、监督行政法律关系 监督行政法律关系是基于对行政权力控制的需要而依法产生的,它是指国家有权监督主体在监督行政行为的过程中,与行政主体之间形成的受行政法规范调整的各种关系。
弧长法(Riks method)是目前结构非线性分析中数值计算最稳定、计算效率最高且最可靠的迭代控制方法之一,它有效地分析结构非线性前后屈曲及屈曲路径跟踪使其享誉"结构界"。大多数商业有限元软件(如ABAQUS、ANSYS等)也都将其纳入计算模块,作为一名工科生,机械式地"Step by Step"点击这些商业软件对话框的时候需"知其然, 知其所以然",否则必将"Rubbish in,Rubbish out"。 图1 弧长法迭代求解过程 图1 所示为弧长法的迭代求解过程,下标表示第个荷载步,上标表示第个荷载步下的第次迭代,显然,若荷载增量 ,则迭代路径为一条平行于轴的直线,即为著名 的牛顿—拉夫逊法。
设第个荷载步收敛于,那么对于第个荷载步来说,需要进行次迭代才能达到新的收敛点。外部参照力,在ABAQUS需要用户以外荷载的形式输入,因此,作用在结构上的真实力大小为。由于牛顿—拉夫逊法在迭代过程中,以荷载控制(或位移控制)时,荷载增量步(或位移增量步)为常数,它无法越过极值点得到完整的荷载—位移曲线,事实上,也只有变化的荷载增量步才能使求解过程越过极值点。从图1中可以看出,弧长法的荷载增量步是变化的,可以自动控制荷载,但这又使原方程组增加了一个多余的未知量,因此需要额外补充一个控制方程,即: (1) 该控制方程说明,其迭代路径是以上一个荷载步收敛点 为圆心半径为的圆弧,所以称为弧长法。通常用户需指定初始弧长半径或固定的弧长半径,当设定了初始弧长半径时,根据收敛速率,一般按式(2)计算,其中为荷载步期望收敛迭代次数,一般取6, 为上一荷载步的迭代次数,大于10时取10。 (2)
行政法的基本原则 反映行政法本质和具体制度规则内在联系的,指导和规范全部行政法的基础性规则和原理。基本原则贯彻于行政法具体规范之中,同时又高于行政法具体规范,体现行政法的基本价值 行政法基本原则对整个行政关系进行宏观地调整和规范,不仅指导、调整行政执法行为,而且指导和调整行政立法行为、行政司法行为 来源:1.国家立法性和政策性文件的规定 2.行政法理论研究 我国目前的法治发展提出了以下几个行政法基本原则: 1.合法行政原则行政法的首要、基本原则,其他行政法从这一原则延伸核心包括两方面:1.消极方面,行政机关必须做到遵循法律,任何行政机关所作的任何决定和规定都不得和现行的法律相抵触,不得作出违反现行法律规定的决定 2.积极方面,行政机关不得作出影响公民、法人和其他组织权益的决定 2.合理行政原则行政行为的内容要符合理性、客观、适度,是实质法治对行政活动的要求。行政机关的行政决定能够符合一个正常理智的普通人的理性,符合社会公德和基本公理合理行政原则的几个重要下位原则:1.公正原则 2.比例原则 3.相关因素的考虑 3.程序正当原则广义,指整个行政法的程序性原则都必须讲求正当性,包括行政公开原则、参与原则、回避原则等狭义,英国行政中的“自然公正原则”和美国行政法中的“正当法律程序原则” 4.高效便民 5.诚实守信 6.权责统一 抽象行政行为和具体行政行为的区别和各自特点 具体行政行为是指国家行政机关、法律法规授权的组织、行政机关委托的组织以及这些组织中的工作人员,在行政管理活动中行使行政职权,针对特定的公民、法人或者其他组织,就特定的具体事项,作出的有关该公民、法人或者其他组织权利义务的单方行为。具体行政行为可以分为:(1)行政处罚。即特定的国家行政机关对有违法行为尚未构成犯罪的违法者所给予的一种法律制裁。如行政拘留、罚款、吊销营业执照、没收等。(2)行政检查。即行政主体依法对行政管理相对人守法情况作单方面了解的行政行为。如海关检查、税务检查、卫生防疫检查等。(3)行政许可。即行政机关根据相对人的申请,依法赋予相对人从事某种法律所一般性允许的活动的权利和资格。如颁发许可证或执照。 (4)行政强制执行。即行政机关依法强制行政管理相对人履行一定义务的行政行为。如查封、扣押、冻结等。 抽象行政行为是指行政主体制定发布普遍性行为规则的行为。行政主体实施抽象行政行为的结果,就是导致行政法规的出现。抽象行政行为分为:(1)羁束行为,即法律、法规对实施行政行为的条件、程序和手续等作了详细具体的规定,行政主体只能严格按照这些规定实施行政行为。(2)自由裁量行为,即法律法规对如何实施行政行为只作了原则性或留有余地的规定,行政主体在实施行政行为时除遵守这些规定外,还必须根据自己意见来决定的行政行为。(3)要式行政行为,即符合法律特定方式才能成立的行政行为。(4)不要式行政行为,即无须以特定的方式就可成立的行政行为。 具体行政行为与抽象行政行为虽然都属于行政行为。但二者也存在本质区别,表现在:(1)实施行政行为的主体不同。实施具体行政行为的主体是各级行政机关及其委托的组织;而实施抽象行政行为的主体只能是国家最高行政机关及地方各级立法机关。(2)具体行政行为可以引起行政诉讼;而抽象行政行为不能引起行政诉讼。 行政许可的设定 概念:是指有权的国家机关,通过制定法律、法规和规章,对公民、法人或其他组织从事某些特定活动设置一定的限制条件,并规定许可的主体、许可的程序以及法律责任的活动 行政许可的设定范围 1.直接涉及国家安全、公共安全、经济宏观调控、生态环境保护以及直接关系人身健康、生命财产安全等特定活动,需要按照法定条件予以批准的事项; 2.有限自然资源开发利用、公共资源配置以及直接关系公共利益的特定行业的市场准入等,需要赋予特定权利的事项; 3.提供公众服务并且直接关系公共利益的职业、行业,需要确定具备特殊信誉、特殊条件或者特殊技能等资格、资质的事项; 4.直接关系公共安全、人身健康、生命财产安全的重要设备、设施、产品、物品,需要按照技术标准、技术规范,通过检验、检测、检疫等方式进行审定的事项; 5.企业或者其他组织的设立等,需要确定主体资格的事项; 6.法律、行政法规规定可以设定行政许可的其他事项。 行政许可的设定权限和形式(太多了不想打) 行政许可的设定程序
屈曲分析的过程说明: 屈曲分析是一种用于确定结构开始变得不稳定时的临介荷载和屈 曲结构发生屈曲响应时的模态形状的技术。ANS 丫醍供两种结构屈曲荷载和屈曲模态分析方法:非线性屈曲分析和特征值屈曲分析。 非线性屈曲分析是在大变形效应开关打开的情况下的一种非线性 静力学分析,该分析过程一直进行到结构的极限荷载或最大荷载。非线性屈曲分析的方法是,逐步地施加一个恒定的荷载增量,直到解开始发散为止。尤其重要的是,要一个足够小的荷载增量,来使荷载达到预期的临界屈曲荷载。若荷载增量太大,贝屈曲分析所得到的屈曲荷载就可能不准确,在这种情况下打开自动时间步长功能,有助于避免这类问题,打开自动时间步长功能,ANS YSS序将自动寻找屈曲荷载。 特征值屈曲分析步骤为: 1.建模 2.获得静力解:与一般静力学分析过程一致,但必须激活预应力影响,通常只施加一个单位荷载就行了 3.获得特征屈曲解: A.进入求解 B.定义分析类型 C.定义分析选项 D.定义荷载步选项
E.求解 4.扩展解 之后就可以察看结果了 示例1: ! ansys 7.0有限元分析实用教程 ! 3.命令流求解 ! ANSYS 命令流: ! Eigenvalue Buckling K,1,0,0 !创建梁实体模型 K, 2,0,100 L, 1,2 !创建直线 单元边长为1mm FINISH !这两行命令清除当前数据 /CLEAR /TITLE,Eige nvalue Buckli ng An alysis /PREP7 !进入前处理器 ET,1,BEAM3 !选择单元 R,1,100,833.333,10 !定义实常数 MP,EX,1,200000 !弹性模量 MP,PRXY,1,0.3 !泊松比 ESIZE,10
结构稳定理论
—拉普森方法上加以改进的一种更利于求解收敛的迭代法,引入了一个附加的未知项一荷载因子λ,其迭代过程如图2-1所示。 图2-1 弧长法 非线性屈曲分析比线性屈曲分析更精确。主要步骤设置:(1)考虑几何非线性,激活大变形效应;(2)材料模型定义。材料非线性由材料屈服准则、流动准则、强化准则定义;(3)施加荷载;(4)求解设置。定义荷载步、子步数、平衡迭代数,定义收敛准则,指定程序终止选项。划分的子步数对屈服荷载的预测准确性有很大的影响,荷载增量不宜过大;(5)采用弧长法。不指定荷载步TIME 值,也不能使用线性搜索、时间步长预测、自适应下降和自动时间步长。可以减小初始半径和降低弧长半径的下限来克服收敛困难;(6)结果。观察结构屈曲变形和相对应力分布;得到结构上任意节点的荷载—变形曲线。 3 多层钢框架整体稳定性分析 6层钢框架,横向(Y)为3跨,柱间距为6m ,纵向(X)为6跨,柱间距为4m ,层高4m ,楼面活荷载标准值为2kN/m ,沿轴线方向的所有梁上施加均布的水平线荷载q 。 钢框架梁为H 形截面,截面尺寸为w f H B t t ???=350×200×20×10,柱
图3-1 Beam188单元 图3-2 Shell181单元 3.1.2网格划分、边界条件和加载 定义单元截面、材料性质,创建几何实体模型,有限元模型网格划分的优劣直接影响结构计算的准确性,本文对钢框架的梁柱网格进行了细划分。为了反映多层钢框架在实际应用中的受力状态,在框架柱脚节点约束了所有方向的自由度,即假定框架柱脚与地面为理想刚接。按照实际情况考虑混凝土楼板以及框架梁柱的重力荷载,楼面的活荷载作用,沿轴线方向所有梁上作用均布水平线荷载q,方向与Y轴的正方向一致。 有限元模型如图3-3所示。
第1篇第1章行政法基本理论 本章考情分析 在最近3年考试中,本章的平均分值为5分,2012年考试本章分值为1分。 部分考点是学习行政法律制度的基石,对第1篇其他章节的理解和掌握有至关重要的影响。 由于是理论性章节,难免抽象、晦涩,复习时注意把握有具体、实质内容的考点,切忌对个别学理性表述纠缠不休。 本章教材主要变化 1.删除“监督行政法律关系”的全部内容; 2.根据《国有土地上房屋征收与补偿条例》,新增若干处举例; 3.删除“理论上有关行政行为无效的情形”; 4.删除“具体行政行为种类”中有关行政强制的概述性内容(行政强制在第1篇第4章中专章阐述); 5.新增“催告制度”为行政程序法的基本制度。 第一节行政法与行政法律关系 一、行政法的概念和特征(了解) 二、行政法的基本原则——行政法治原则(掌握) (一)行政合法性原则 1.存在合法:行政权力的存在有法律依据; 【解释】行政法是“法无授权即禁止”;民商法是“法无禁止即允许”。 2.行使合法:行政权力必须按照法定程序行使。 (二)行政合理性原则——实质合法性原则 1.行政合理性原则,是指行政行为的内容要客观、适度、符合理性。 2.行政合理性原则产生的主要原因是行政自由裁量权(亦称“行政裁量权”)的存在。 3.内容 (1)行政行为应符合立法目的; (2)行政行为应建立在考虑相关因素的基础上; (3)平等地适用法律规范,符合公正法则; (4)行政行为应保持适度,符合比例原则的要求(2012年新增); ①行政机关在可以采用多种方式实现某一行政目的的情况下,应当采用对当事人权益损害最小的方式,作出的行政行为才是合理和适当的。 ②作出行政行为时,行政机关应当在作出的具体行政措施与所要达到的行政目标之间保持适当的比例。
第三章提拉法及其合成宝石的鉴定 要点: ?晶体提拉法的原理方法 ?提拉法合成宝石的鉴定 提拉法又称丘克拉斯基法,是丘克拉斯基(J.Czochralski)在1917年发明的从熔体中提拉生长高质量单晶的方法。这种方法能够生长无色蓝宝石、红宝石、钇铝榴石、钆镓榴石、变石和尖晶石等重要的宝石晶体。2O世纪60年代,提拉法进一步发展为一种更为先进的定型晶体生长方法——熔体导模法。它是控制晶体形状的提拉法,即直接从熔体中拉制出具有各种截面形状晶体的生长技术。它不仅免除了工业生产中对人造晶体所带来的繁重的机械加工,还有效的节约了原料,降低了生产成本。 第一节提拉法 一、提拉法的基本原理 提拉法是将构成晶体的原料放在坩埚中加热熔化,在熔体表面接籽晶提拉熔体,在受控条件下,使籽晶和熔体的交界面上不断进行原子或分子的重新排列,随降温逐渐凝固而生长出单晶体。 图 3-1 提拉法合成装置 (点击可进入多媒体演示) 二、提拉法的生长工艺
首先将待生长的晶体的原料放在耐高温的坩埚中加热熔化,调整炉内温度场,使熔体上部处于过冷状态;然后在籽晶杆上安放一粒籽晶,让籽晶接触熔体表面,待籽晶表面稍熔后,提拉并转动籽晶杆,使熔体处于过冷状态而结晶于籽晶上,在不断提拉和旋转过程中,生长出圆柱状晶体。 1.晶体提拉法的装置 晶体提拉法的装置由五部分组成: (1)加热系统 加热系统由加热、保温、控温三部分构成。最常用的加热装置分为电阻加热和高频线圈加热两大类。采用电阻加热,方法简单,容易控制。保温装置通常采用金属材料以及耐高温材料等做成的热屏蔽罩和保温隔热层,如用电阻炉生长钇铝榴石、刚玉时就采用该保温装置。控温装置主要由传感器、控制器等精密仪器进行操作和控制。 (2)坩埚和籽晶夹 作坩埚的材料要求化学性质稳定、纯度高,高温下机械强度高,熔点要高于原料的熔点200℃左右。常用的坩埚材料为铂、铱、钼、石墨、二氧化硅或其它高熔点氧化物。其中铂、铱和钼主要用于生长氧化物类晶体。 籽晶用籽晶夹来装夹。籽晶要求选用无位错或位错密度低的相应宝石单晶。 (3)传动系统 为了获得稳定的旋转和升降,传动系统由籽晶杆、坩埚轴和升降系统组成。 (4)气氛控制系统 不同晶体常需要在各种不同的气氛里进行生长。如钇铝榴石和刚玉晶体需要在氩气气氛中进行生长。该系统由真空装置和充气装置组成。 (5)后加热器 后热器可用高熔点氧化物如氧化铝、陶瓷或多层金属反射器如钼片、铂片等制成。通常放在坩埚的上部,生长的晶体逐渐进入后热器,生长完毕后就在后热器中冷却至室温。后热器的主要作用是调节晶体和熔体之间的温度梯度,控制晶体的直径,避免组分过冷现象引起晶体破裂。 2.晶体提拉法生长要点 (1)温度控制 在晶体提拉法生长过程中,熔体的温度控制是关键。要求熔体中温度的分布在固液界面处保持熔点温度,保证籽晶周围的熔体有一定的过冷度,熔体的其余部分保持过热。这样,才可保证熔体中不产生其它晶核,在界面上原子或分子按籽晶的结构排列成单晶。为了保持一定的过冷度,
弧长法的一点资料 对于许多物理意义上不稳定的结构可以应用弧长方法(ARCLEN)来获得数值上稳定的解,应用弧长方法时,请记住下列考虑事项: 1、弧长方法仅限于具有渐进加载方式的静态分析。 2、程序由第一个子步的第一次迭代的载荷(或位移)增量计算出参考弧长半径,公式为:参考弧长半径=总体载荷(或位移)/NSBSTP。NSBSTP是NSUBST 命令中指定的子步数。 3、选择子步数时,考虑到较多的子步导致求解时间过长,因此理想情况是选择一个最佳有效解所需的最小子步数。有时需要对子步数进行评诂,按照需要调整再重新求解。 4、弧长方法激活时,不要使用线搜索(LNSRCH)、预测(PRED)、自适应下降(NROPT,ON)、自动时间分步(AUTOTS,TIME,DELTIM)或时间积分效应(TIMINT)。 5、不要使用位移收敛准则(CNVTOL,U)。使用力的收敛准则(CNVTOL,F)。 6、要用弧长方法帮助缩短求解时间时,单一子步内最大平衡迭代数应当小于或等于15。 7、如果一个弧长求解在规定的最大迭代次数内没能收敛,程序将自动进行二分且继续分析或者采用最小弧长半径(最小半径由NSUBST(NSUBST)和MINARC (ARCLEN)定义)。 8、一般地,不能应用这种方法在确定载荷或位移处获得解,因为这个载荷或者位移值随获得的平衡态改变(沿球面弧)。注意图1-4中给定的载荷仅用作一个起始点。收敛处的实际载荷有点小。类似地,当在一个非线性屈曲分析中应用弧长方法在某些已知的范围内确定一个极限载荷或位移的值可能是困难的。通常不得不通过尝试-错误-再尝试调整参考弧长半径(使用NSUBST)来在极限点处获得一个解。此时,应用带二分法(AUTOTS)的标准 NEWTON-RAPHSON迭代来确定非线性载荷屈曲临界负载的值可能会更方便。 9、通常应当避免和弧长方法一起使用JCG或者PCG求解器(EQSLV),因为弧长方法可能会产生一个负定刚度矩阵(负的主对角线),导致求解失败。 10、在任何载荷步的开始,可以从Newton-Raphson 迭代方法到弧长方法自由转换。然而,要从弧长到Newton-Raphson迭代转换,必须终止分析然后重启动,且在重启动的第一个载荷步中去关闭弧长方法(ARCLEN,OFF)。 注意: 弧长求解发生中止的条件: (1)当由ARCTRM或NCNV 命令定义的极限达到时。 (2)当在所施加的载荷范围内求解收敛时。 (3)当使用一个放弃文件时(Jobname.ABT)。 11、通常,一个不成功的弧长分析可以归因于弧长半径或者太大或者太小,沿载荷一偏移曲线原路返回的“回漂”是一种由于使用太大或太小弧长半径导致的典型难点。研究载荷偏移曲线来理解这个问题。然后使用NSUBST 和ARCLEN 命令来调整弧长半径的大小和范围为合适的值。 12、总体弧长载荷因子(SOLU命令中的ALLF项)或者会是正的或者会是负的。类似地,TIME,其在弧长分析中与总体弧长载荷因数相关,不是正的就是负的。ALLF或TIME 的负值表示弧长特性正在以反方向加载,以便保持结构中的稳定性。负的ALLF或者TIME值一般会在各种突然转换分析中遇到。13、读入基本数据用于POSTI后处理时(SET),应该以载荷步和子步号(LSTEP 和SBSTEP)或者进它的数据设置号为依据。不要引用TIME值的结果,因为TIME 值在一个弧长分析中并不总是单调增加的。单一的一个TIME 值可能涉及多于一个的解。此外,程序不能正确地解释负的TIME 值(可能在一个突然转换分析中遇到)。 14、如果TIME 为负的,记住在产生任何POST26图形前定义一个合适的变化范围((IXRANGE)或者(IYRANGE))。
行政法知识结构图
行政法基本理论知识树结构图 行政法与行政法律关系行政法基本 原则 合法性原则 含义:是指行政权的存在、行使必须依据法律、符合法 律,不得与法律相抵触。 要求:既要符合实体法,又要符合程序法 内容:行政权的存在有法律依据,按照法定程序行使。 合理性原则 含义:是指行政行为的内容客观、适度、符合理性。 原因:行政自有裁量权的存在。 内容:符合立法目的;建立在考虑相关因素的基础上; 平等适用法律,符合公正原则;符合自然规律和社会道 德,符合人类理性和公平观念。 应急性原则 含义:是指在特殊的紧急情况下,出于国家安全、社会 公共利益的需要,行政机关可以采取没偶遇明确法律依 据的或通常状态下的法律规定相抵触的措施。 例外:是行政合法性原则的例外。 条件:存在明确无误的紧急危险或危害;非法定机关不 得行使应急权利,否则无效,除非事后经有权机关作出 特别决定予以追认;应接受有权机关的监督;行使应当 得当,应将负面损害控制在最小范围内。 行政法的渊 源 宪法 法律 基本法律:行政诉讼法、行政处罚法、企业所得税法。 一般法律:税收征管法、治安管理处罚条例、行政复议 法。 行政法规 行政复议法实施条例,税收征管法实施细则、增值税暂 行条例。 制度机关:国务院 行政规章 海关行政处罚听证办法,税务行政复议规则,注册税务 师管理暂行办法。 制定机关:国务院部委及直属机构。 地方性法规 民族自治条例、 单行条例 自治区:报全国人大常委会批准后生效。 自治州、自治县:报省或自治区人大常委会批准后生效, 并报全国人大常委会和国务院备案 行政法的其他 渊源 国际条约、国际协定、规范性文件 例如:税务稽查工作规程 效力冲突的解 决方式 法律之间、授权制定的法规与法律之间由全国人大常委 会裁决 行政法规之间由国务院裁决 部门规章与地方法规之间,由国务院提出意见,国务院 认为适用地方法规的适用地方法规,国务院认为适用规 章的,提请人大常委会裁决。 部门规章之间、部门规章与政府规章之间由国务院裁决。 整体原则:适用家长裁决制 行政法律关行政法律关系主体、客体、内容
研究生课程论文 《光流法运动目标跟踪》 课程名称s 姓名 学号 专业 任课教师 教师评阅意见: 论文成绩评阅日期 课程论文提交时间:年月日
摘要本文实现了对运动目标的跟踪检测,重点研究金字塔Lucas-Kanade算法,在研究基于特征点的目标跟踪的一般方法,即采用改进的Harris角点提取点的方法。实验结果表明先采用Shi-Tomasi算法比Harris算法提取角点效果更好,之后用金字塔光流进行跟踪。 关键词运动目标跟踪Lucas-Kanade Shi-Tomasi 改进Harris 1.引言 近些年,模式识别领域的图像处理已经成为一个支柱,其中,动态目标的识别跟踪已经被研究者应用到工程上,而运动目标跟踪算法的优劣直接影响着运动目标跟踪的稳定性和精确性。本文主要是运动光流法等算法对运动目标进行跟踪。目标特征点的跟踪是计算机视觉中的一个基本而极具挑战性的研究课题,该课题在人机互动(HCI),目标识别,目标运动等领域有着非常重要的应用。虽然对运动目标跟踪算法能够完成对运动目标的可靠跟踪,大多数都存在处理数据量大,运算复杂等问题。因此,研究具有高精度且运算简单的目标检测与跟踪算法是图形跟踪迫切需要解决的问题,目前基于特征和光流的图像跟踪方法受到了极大的关注。 2.运动目标检测算法 运动目标检测技术是目标自动检测、识别与跟踪的基础,也是实现进一步处理视频编码、目标跟踪、目标分类及行为理解等的关键技术。基于视频或序列图像的分析一般可分为四个步骤:(1)运动目标的检测与提取,(2)运动目标的分类,(3)运动目标的跟踪,(4)运动目标的行为理解与分析,如图1所示。 图像序列运动检测目标分类目标跟踪行为理解 图1 分析过程 在计算机视觉处理中,运动目标检测技术处于中层处理级别,它是指在一个视频或者图像中,对需要研究的并且是处于运动状态的目标和背景进行分离,对于行为理解,行为分析等其他技术的研究,运动目标检测也是一种有效的方法。 目标检测要依据运动目标的主要特性,例如时间特性、边缘形状特性、颜色灰度特性、矢量特性等等。时间特性、区域作为视频序列时间差分和图像分割的基础,是运动目标最基本的特性。目标运动时在形状、大小、刚度等方面的差异称为形态特征,利用形态特征对运动目标检测,难点是对小目标的检测。 3.光流法 1950年,Gibuson首先提出了光流的概念,所谓光流就是指图像表现运动的速度。物体在运动的时候之所以能被人眼发现,就是因为当物理运动时,会在人的视网膜上形成一系列的连续变化的图像,这些变化信息在不同时间,不断的流过眼睛视网膜,就好像一种光流过一
3.2.2 问题详细说明 下列材料性质应用于这个问题: EX=1000 (杨氏模量) NUXY=0.35(泊松比) Yield Strength =1 (屈服强度) Tang Mod=2.99(剪切模量) 3.2.3 问题描述图 图3-4 问题描述图 3.2.4 求解步骤(GUI方法) 步骤一:建立模型,给定边界条件。 在这一步中,建立计算分析所需要的模型,定义单元类型,材料性质 划分网格,给定边界条件。并将数据库文件保存为“exercise1.db”。 在此,对这一步的过程不作详细叙述(您也可以从§3.2.5中取出命令流段完成这一步骤)。步骤二:恢复数据库文件“exercise.db” Utility Menu>File>Resume from 步骤三:进入求解器。 Main Menu>solution 步骤四:定义分析类型和选项 1、选择菜单路径Main Menu>Solution>-Analysis Type-New Analysis. 单击“Static”来选中它然后单击OK。
2、择菜单路径Main Menu>Solution>Unabridged Menu>Analysis Options。 出现对话框。 3、单击Large deform effects (大变型效应选项)使之为ON,然后单击OK。 步骤五:打开预测器。 Main menu> Solution>Unabridged Menu>Load step opts-Nonlinear> Predictor 步骤六:在结点14的Y方向施加一个大小为-0.3的位移 Main menu >Solution -Load -Apply >displacement >On Nodes 步骤七:设置载荷步选项 1、选择菜单路径Main Menu> Solution>Unabridged Menu>Load step opts-Time/Frequenc> Time and substps。对话框出现。 2、对time at end of Load Step(载荷步终止时间)键入0.3 3、对Number of substeps (子步数)键入120。 4、单击automatic time stepping option(自动时间步长选项)使之为ON,然后单击OK。 5、选择菜单路径Main Menu > Solution>Unabridged Menu >Load step opts-Output ctrls > DB/Resuls File。对话框出现。 6、单击“Every Nth substep”(“每隔N个子步”)且选中它。 7、对于Value of N (N的值)键入10然后单击OK。 8、单击ANSTS Toolbar上的SAVE_DB。 步骤八:求解问题 1、选择菜单路径Main Menu>Solution>-Solve-Current LS。 2、检阅状态窗口中的信息然后单击close。 3、单击Solve Current Load Step(求解当前载荷步)对话框中的OK开始求解。
江苏科技大学土木工程与建筑学院 研 究 生 读 书 报 告 题 目: 非均匀锈蚀对钢筋混凝土结构开裂和使用寿命的影响 Effects of non-uniform corrosion on the cracking and service life of reinforced concrete structures 作 者: Bong Seok Jang , Byung Hwan Oh 期 刊: Cement and Concrete Research 40(2010)1441—1450 学 科: 高等混凝土结构理论 学生姓名: 陈小健 指导教师: 吴庆 报告日期: 2012.05.15 报告形式: 书面 二0一二年五月 博 士 □ 直 博 □ 硕 士 □
在不同阶段的学习过程中,尤其是研究生阶段,阅读一定量的国外期刊文献,对于个人了解与本专业相关的国外热点问题和前沿信息是很有帮助的。结合《高等混凝土结构理论》课程的特点和本人的研究方向,有针对性地选取了《Cement and Concrete Research 》杂志2010版上收录的一篇题为Effects of non-uniform corrosion on the cracking and service life of reinforced concrete structures 的文章,并从以下几方面对这篇外文做简要的介绍。 一、作者简介 本文第一、第二作者分别为韩国水环境研究所和韩国国立首尔大学的研究人员。他们长期从事混凝土结构耐久性方面的研究,并取得了丰硕的成果。 二、写作目的 本文研究的目的在于探讨非均匀锈蚀对于混凝土保护层开裂的影响。研究非均匀锈蚀的分布(α)、保护层厚度与钢筋直径的比值(c/d )以及混凝土的抗压强度(f c )等因素对混凝土保护层开裂压力(P cr )的影响。并探讨了非均匀锈蚀对于混凝土结构使用寿命的影响。 三、主要观点 1.在非均匀锈蚀情况下(α=4~8)引起混凝土保护层开裂的压力要比均匀锈蚀情况下小的多。也就是说,根据非均匀锈蚀分布情况,开裂压力减少到40%~60%。这就意味着钢筋外表面的局部锈蚀以相对较小的膨胀力就能造成混凝土保护层的失效。从González et al [1]的试验中可知,在自然情况下α(非均匀锈蚀程度)的值在4到8之间变化。 2.就α(非均匀锈蚀程度)的值而言,对于不同的保护层厚度与钢筋直径的比值c/d ,得到由钢筋锈蚀引起的混凝土保护层开裂压力回归公式。 时当5.0/585.150 .0==-d c P cr α (3-1) 时当0.1/303.345 .0==-d c P cr α (3-2) 时当0.2/703.640.0==-d c P cr α (3-3) 3.目前的研究表明,由于锈蚀膨胀引起混凝土保护层开裂的压力大小随着保护层厚度的增加而增加,几乎与保护层厚度和钢筋直径的比值c/d 线性成比例。 时 当1)/(845.205.1==αd c P cr (3-4) 时当4)/(693.111 .1==αd c P cr (3-5) 4.随着钢筋直径的增加,混凝土保护层开裂压力略有减小。然而,研究发现,钢筋直径对于由钢筋锈蚀引起的混凝土开裂压力的影响是非常小的。 5.随着混凝土强度的增加,混凝土保护层的开裂压力增大。对于不同α(非均匀锈蚀程度)值,开裂压力回归公式是根据混凝土抗压强度推导而来的。同时,这里的开裂
midas FEA Technique Data Series 技术资料–极限承载力计算说明 [图1][图2] [图3] [图4] 1. 结构设计理论发展简介 钢筋混凝土结构设计理论的发展先后经历了容许应力理论、破损阶段理论和极限状态理论。极限状态设计理论所依据的是极限强度理论,其基本原则是求出截面破坏时的极限承载力,然后控制截面在使用荷载作用下的内力不大于破坏时的极限承载力除以某种安全系数。随着可靠度理论的发展,安全系数的取值已经从传统的定值设计法发展到今天的半概率设计法,又在向近似概率设计法发展,使结构设计的极限状态理论向更完善、更科学的方向发展。但是,只有结构的极限承载力得以准确评估后,结构安全系数更为精确、科学的取值才会有意义,结构安全度才能得到充分保证。因此,钢筋混凝土结构极限承载力的计算是十分重要的一项工作,它的准确取值对结构设计的经济性、安全性和可靠性都有十分重大的意义。 2. 求解极限承载力的方法 使用有限元软件,我们可以采用载荷增量加载或是位移增量加载的模式来求解结构的极限承载力,并以有限元计算不收敛作为达到极限破坏状态的判断标准。于是影响程序收敛的所有因素都会关系到极限承载力的判断,比如网格划分,本构模型,迭代方法,收敛准则等。如果这些因素把握的不好,有限元模拟出来的极限承载力可能就不准。 进行极限承载力计算时,我们往往设置一个比较大的荷载,控制较小的增量加载,在计算发散之前所能达到的最大增量步的荷载就代表结构的极限承载能力。如果画出载荷-位移曲线,这一步就是载荷位移曲线即将下弯的最高点。无论使用什么有限元软件,求解极限承载力的方式都是这样的,不同的只是每个有限元程序中的本构模型,钢筋模拟方式,迭代和收敛方法的控制等。在此对论文[1]中的一个试验模型进行有限元模拟计算其极限承载力,并和试验数据对比。试验所用模型梁为矩形截面梁,采用两点对称加载方式。梁的具体尺寸和配筋如图1所示。混凝土材料常数:混凝土抗压强度为20 M Pa,弹性模量为2.5×10 MP a;钢筋强度为310 MP a,弹性模量为2.0×10 MP a。梁所配钢筋为Φ16,试验与FEA计算得到的该梁的极限承载力对比如下表,两者十分接近。FEA中的有限元模型如图2所示,钢筋采用植入式钢筋的形式模拟,得到的跨中荷载挠度曲线如图3所示,最后荷载步的裂缝应变分布如图4所示。 试验值 FEA模拟值极限承载力(kN) 110 104 由于极限承载力计算不再仅仅限于材料的弹性状态,材料的非线性特性需要在本构中定义,尤其是对于抗拉强度很小的混凝土材料,在裂纹产生之后裂纹对材料本构的影响需要在本构模型中体现出来,比如说材料的拉伸软化曲线,剪力传递系数等。FEA中提供了总应变裂缝模型可以定义裂纹对材料本
第三讲中国行政法学的理论体系 教学目的:通过本章的学习使学生掌握行政法基本范畴与理论体系,领会行政法学 的逻辑原点和行政法的逻辑起点。 教学重点:行政法的逻辑起点; 教学难点:行政法基本范畴与理论体系。 本讲教学内容: 第一节从自由意志到权利:行政法学的逻辑原点 第二节从权利到权利聚合的行政职权:行政法的逻辑起点 第三节行政法理论体系 第一节从自由意志到权利:行政法学的逻辑原点 人具有自由意志这一人类特有的本质属性,它不是完全抽象静态的,人的自由意志是由自然自在到社会的自在自为的过程。人类作为存在,自由意志是人类存在的本质属性与存在内容,而人类的这种存在又是存在于我们这个具体宇宙世界即波普所说的由三个不同但相互作用的世界组成(世界1是物质的世界如海洋和陆地,世界2是心理的世界如人的感觉和情绪,世界3是理念的世界如数学和逻辑),[12]人类在存在过程中就无可避免要与波普所说的这三个世界打交道,也就是需要处理好I-You和I-It的关系,需要使存在得以能继续存在下去的需求,即满足人的欲望和利益,去进行可能生活,从而体现和表达人类的存在与生存的意义——追求和实现人的幸福。[13]马克思、恩格斯在《德意志意识形态》一书中明确指出:“人们为了能够‘创造历史’,必须能够生活。但是为了生活,首先就需要衣、食、住以及其他东西。因此,第一个历史活动就是生产满足这些需要的资料,即生产物质生活本身” [14]。美国著名的心理学家马斯洛(Abraham Maslow)在1943年发表的《人类动机理论》中,将人类的需要概括为由高到低的五个层次:生理需要——安全需要——社会需要(归属和爱的需要)——尊重需要——自我实现的需要[15]。因此,可以说,需要是人的欲望前提,是人生存和发展的根本条件。人由需要而产生欲望,人的这种欲望在人的内心产生之后是要对外显现为一种目的即利益,表现为一定的行为,即需要――欲望――行为目的――行为手段――行为。[16]这种需要――欲望的满足实现过程,必然不可避免要涉及到满足的手段与保障的问题。具体而言就是人在自然和社会中需处理I-You和I-It的关系,这种需要――欲望的满足过程而产生的人行为目的,其对外表现出来就是为一种利益,这种利益需要一定的手段来保障与规范,这就是人类之间相处的规则,其中经一定公共权力确认或制定就上升为法律规则(规范),也就是法律上的权利。因此说,权利是人的意志自由外在欲望化的法律确认和保障,即法是人的意志自由的自在自为的定在[17]。恩格斯对此也作了明确的表述:“如果不谈谈所谓自由意志……就不能很好地讨论道德和法的问题。” [18] 从上论述我们可以得出这样的结论:法律就其形式而言是一种意志的表现,其内容是对人的存在性自由意志的体认和实现,法的本质是权利,这种权利以契约的方式聚合成作为公共权力组成部分的行政权力,从而公民权利构成行政法的逻辑原点。 第二节从权利到权利聚合的行政职权:行政法的逻辑起点[19] 人作为自由意志的存在,前述已表明其不仅是一种自在的存在,更是一种自为的存在。换言之,人的自由意志的自在自为存在,就是要处理好大我与小我、身我与心我、本我与他我、本我与它我的关系[20];而处理这些关系,人类是通过需要――欲望的满足过程而产生的人行为目的(其对外表现出来就是为一种利益),借助于一定的人们之间相处的规则即法律来保障与规范。具体来说,人由自由意志到权利,处理大我与小我、身我与心我的关系主要是解决权利的本体和神圣性,这在法律上主要体现为人的人格权;处理本我与他我、本我