浅谈用于电机传动系统的多逆变器并联控制技术
摘要:本文将分析并联逆变电源控制技术的发展,研究电流调节器的控制原理,解决多逆变器的运行控制问题。
关键字:电机传动系统;多逆变器;并联控制
随着国内电力工业的不断发展,发电厂、变电站在故障情况下要求不间断的电源供应的交流负荷逐渐增加,对于交流电供电质量以及供电的可靠性的要求也随着升高,因此如何来提高逆变器的供电质量以及可靠性至关重要。
一、并联逆变电源控制技术
(一)无主可并联逆变控制技术
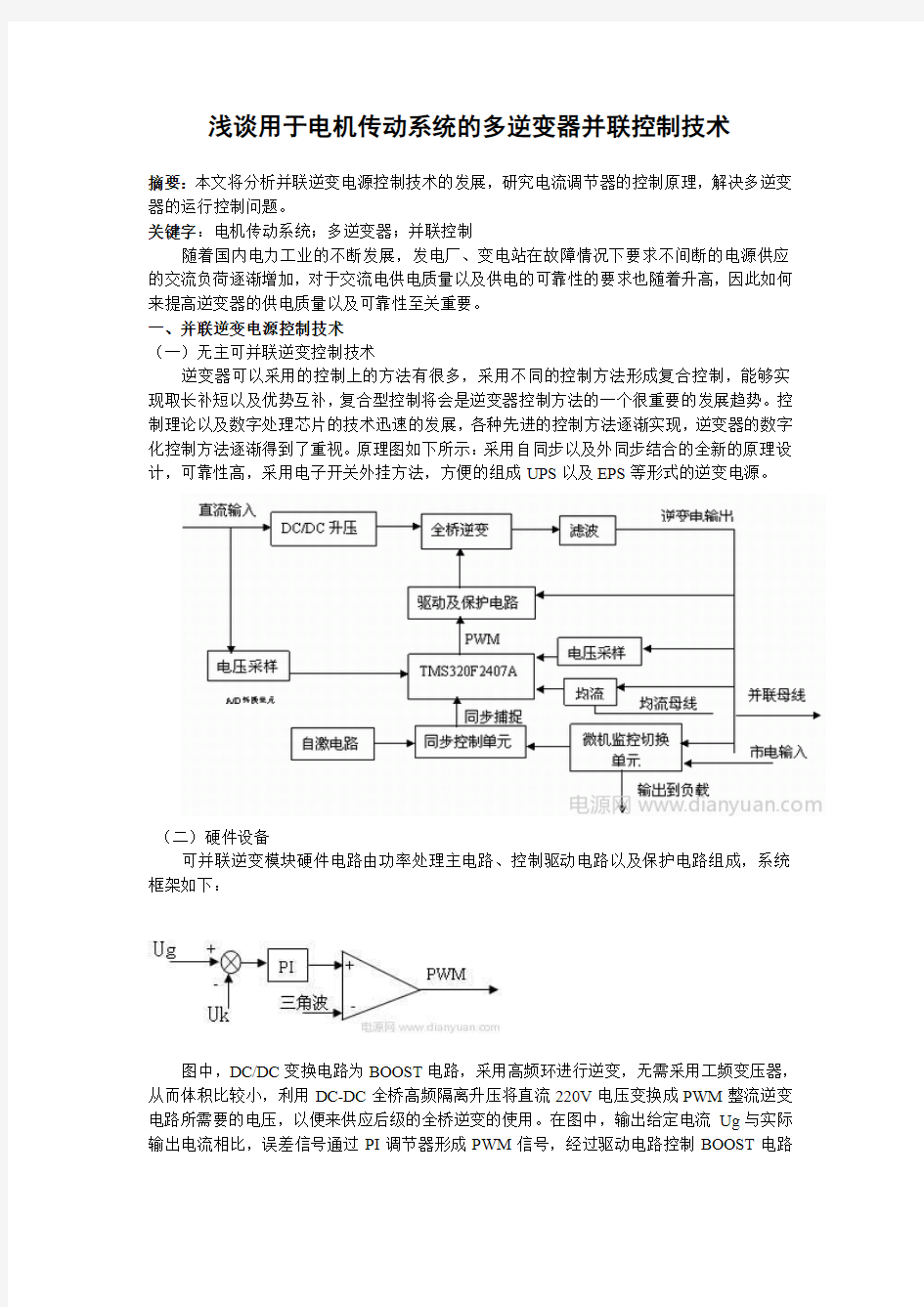
逆变器可以采用的控制上的方法有很多,采用不同的控制方法形成复合控制,能够实现取长补短以及优势互补,复合型控制将会是逆变器控制方法的一个很重要的发展趋势。控制理论以及数字处理芯片的技术迅速的发展,各种先进的控制方法逐渐实现,逆变器的数字化控制方法逐渐得到了重视。原理图如下所示:采用自同步以及外同步结合的全新的原理设计,可靠性高,采用电子开关外挂方法,方便的组成UPS以及EPS等形式的逆变电源。
(二)硬件设备
可并联逆变模块硬件电路由功率处理主电路、控制驱动电路以及保护电路组成,系统框架如下:
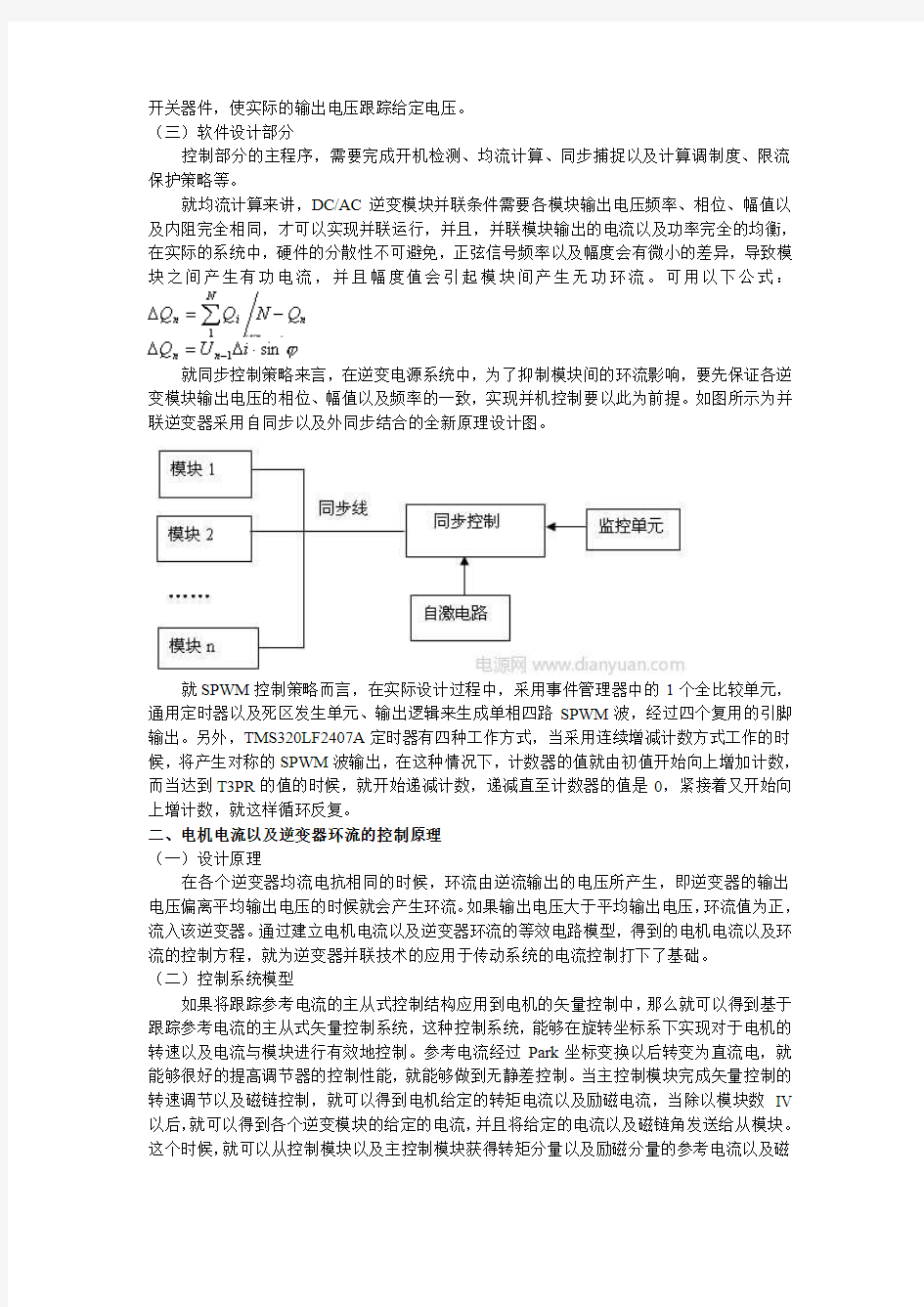
图中,DC/DC变换电路为BOOST电路,采用高频环进行逆变,无需采用工频变压器,从而体积比较小,利用DC-DC全桥高频隔离升压将直流220V电压变换成PWM整流逆变电路所需要的电压,以便来供应后级的全桥逆变的使用。在图中,输出给定电流Ug与实际输出电流相比,误差信号通过PI调节器形成PWM信号,经过驱动电路控制BOOST电路
开关器件,使实际的输出电压跟踪给定电压。
(三)软件设计部分
控制部分的主程序,需要完成开机检测、均流计算、同步捕捉以及计算调制度、限流保护策略等。
就均流计算来讲,DC/AC逆变模块并联条件需要各模块输出电压频率、相位、幅值以及内阻完全相同,才可以实现并联运行,并且,并联模块输出的电流以及功率完全的均衡,在实际的系统中,硬件的分散性不可避免,正弦信号频率以及幅度会有微小的差异,导致模块之间产生有功电流,并且幅度值会引起模块间产生无功环流。可用以下公式:
就同步控制策略来言,在逆变电源系统中,为了抑制模块间的环流影响,要先保证各逆变模块输出电压的相位、幅值以及频率的一致,实现并机控制要以此为前提。如图所示为并联逆变器采用自同步以及外同步结合的全新原理设计图。
就SPWM控制策略而言,在实际设计过程中,采用事件管理器中的1个全比较单元,通用定时器以及死区发生单元、输出逻辑来生成单相四路SPWM波,经过四个复用的引脚输出。另外,TMS320LF2407A定时器有四种工作方式,当采用连续增减计数方式工作的时候,将产生对称的SPWM波输出,在这种情况下,计数器的值就由初值开始向上增加计数,而当达到T3PR的值的时候,就开始递减计数,递减直至计数器的值是0,紧接着又开始向上增计数,就这样循环反复。
二、电机电流以及逆变器环流的控制原理
(一)设计原理
在各个逆变器均流电抗相同的时候,环流由逆流输出的电压所产生,即逆变器的输出电压偏离平均输出电压的时候就会产生环流。如果输出电压大于平均输出电压,环流值为正,流入该逆变器。通过建立电机电流以及逆变器环流的等效电路模型,得到的电机电流以及环流的控制方程,就为逆变器并联技术的应用于传动系统的电流控制打下了基础。
(二)控制系统模型
如果将跟踪参考电流的主从式控制结构应用到电机的矢量控制中,那么就可以得到基于跟踪参考电流的主从式矢量控制系统,这种控制系统,能够在旋转坐标系下实现对于电机的转速以及电流与模块进行有效地控制。参考电流经过Park坐标变换以后转变为直流电,就能够很好的提高调节器的控制性能,就能够做到无静差控制。当主控制模块完成矢量控制的转速调节以及磁链控制,就可以得到电机给定的转矩电流以及励磁电流,当除以模块数IV 以后,就可以得到各个逆变模块的给定的电流,并且将给定的电流以及磁链角发送给从模块。这个时候,就可以从控制模块以及主控制模块获得转矩分量以及励磁分量的参考电流以及磁
链角。
三、逆变器的并联运行控制
(一)各个逆变器输出电压的幅值以及相位变化的控制
在实际操作中,可以独立的分别通过控制各个逆变器输出电压的幅值以及相位的变化来控制输出功率的无功分量以及有功分量,以便能够在逆变器之间平均分配功率,首先,幅值或者是相角变大的电源,输出的无功功率或者有功功率也会随着增大。并联控制方法会使逆变器输出的电压的幅值以及相角随着无功以及有功功率的增大而减小,这种方法就叫做下垂方法;其次,相角差对于系统的影响要比幅值的差要大得多;再者,适当的增加逆变器的输出电量能够有效地抑制输出不平衡产生的功率差。
(二)下垂控制算法
如果利用一个定时器产生一个400HZ的方波作为所有逆变器的同步信号,各个逆变器的给定的电压信号都能够与这个同步信号同步。同时由于同步信号通过光纤传播,因此不会收到其他信号的干扰。因而在利用这个同步信号的基础上,如果用下垂的方法对输出的电压的相位进行调整就能达到很好的均流效果。
如果有一个完整的运行控制系统,那么逆变器自身的输出系统是由一个带幅值环的双闭控制器形成,双闭环的最内环是电感电流环,而电流环的外部就是电容电压环,那么最外部就是幅值环。另外还引入了输出电压解耦项,用以消除输出电压对于电流环的扰动,通过这种方法,控制器就能够有效地消除系统静差,用以保证逆变器有并联控制器根据逆变器的自身的输出的电压以及电流,就能将输出电流分解为有功电流、无功电流以及直流电流。(三)逆变器以及逆变系统的保护
当对于逆变器以及逆变系统进行保护时,通常有两种方法:首先,输出过载达到电流保护的时候,其次,并机失败时,这时候导致的环流超过了逆变器的容忍额度。这个时候,保护的手段有限流以及关闭逆变器两种方式。如果逆变器输出电流超过额定的电流的150%,这个时候,就会进入限流模式,正弦波就会出现削顶的现象,而且负载阻抗越小,削顶电压就越低。如果这个时候逆变器出现短路就不会接着输出电压。当负载电流超过120%,微处理器启动过载保护计时程序,就会按照容忍时间表作出相应的计时,一旦超过保护时间,逆变器就会被关闭。
参考文献:
[1]宋庆国,张晓锋,乔鸣忠,等.多相高压无刷直流电动机调速系统研究[J].电机与控制学报,2007(11)
[2]蔡昆,李耀华,胜晓松,等.高性能单相电压源逆变器的输出控制[J].电工技术学报,2005(9)
[3]肖岚,胡文斌,蒋渭忠,等.基于主从控制的逆变器并联系统研究[J].东南大学学报,2002(7)
下垂控制的原理是什么。? 下垂控制是并网逆变器的常用控制原理,但是具体下垂控制的深层原理和物理含义是什么啊?查到的几乎所有的文献对此都是基于下垂控制XXXX、仿照同步发电机下垂特性XXXX,却没有一个真正说清楚仿照哪了,电机书上对同步发电机的下垂特性也没讲清楚其物理原理。向各位知乎大神求教,我看网上也有很多问这个的却没有一个回答说清楚的。 添加评论 分享 简单来说,所谓下垂控制就是选择与传统发电机相似的频率一次下垂特性曲线(Droop Character)作为微源的控制方式,即分别通过P/f下垂控制和Q/V下垂控制来获取稳定的频率和电压,这种控制方法对微源输出的有功功率和无功功率分别进行控制,无需机组间的通信协调,实现了微源即插即用和对等控制的目标,保证了孤岛下微电网内电力平衡和频率的统一,具有简单可靠的特点。—————————————————————————————————————————— 补充说一说。 学过电机学都知道,发电机有个功角特性曲线,其中凸极同步发电机的 无功功率表达式是: 有功 功率表达式: 我们可以看出,通过控制U和功角来控制有功功率P和无功功率Q。那么反过来, 可以通过控制有功功率P和无功功率Q来控制U和功角 所以, 微电网中的常规下垂控制是通过模拟传统发电机的下垂特性,实现微电网中微电源的并联运行。其实质为:各逆变单元检测自身输出功率,通过下垂特性得到输出电压频率和幅值的指令值,然后各自反相微调其输出电压幅值和频率以达到系统有功和无功功率的合理分配。 逆变器输出电压频率和幅值的下垂特性为:
其中w0,U0分别为逆变器输出的额定角频率,额定电压。kp,kq为逆变器下垂系数。P,Q 分别为逆变器实际输出的有功功率和无功功率。P0,Q0分别为逆变器额定有功和无功功率。 由上式我们可以得到三相逆变器常规的P-f 和Q-U 下垂控制框图。 注:常规下垂控制是在系统并联逆变器的输出端等效阻抗为大电感的条件下推导得到的。然而不同电压等级的连接线路对应不同的阻感比。 在电压等级较低的线路中,阻感比相对较高。 加之每个逆变器到交流母线的距离不同,线路越长,线路电阻越大,可能会导致线路电阻相对线路感抗较大,常规下垂控制已经不能满足低压微电网控制的需求。 所以就有了一种改进型功率耦合下垂控制策略。 因为低压微电网中线路阻抗的影响已经不能完全忽视,有功功率和无功功率对电压和频率的调节存在耦合关系。 逆变电源输出的有功功率P和无功功率Q可以写为: 单台逆变器到交流母线的功率传输示意图:
《电机驱动技术》课程标准 一、课程基本信息 二、课程定位与作用 (一)课程定位 《电机驱动技术》课程的开设是通过深入企业调研,与专业指导委员会专家共同论证,根据工作任务与职业能力分析,以必须、够用为度,以掌握知识、强化应用、培养技能为重点,以机电一体化相关工作任务为依据设置本课程。 (二)课程的作用 《电机驱动技术》课程是机电一体化专业必修的一门专业核心课程。是在电工电子、电力拖动等课程基础上,开设的一门综合性较强的核心课程,其任务是使学生掌握常用电动机的结构及其控制方法,培养学生对常用电动机的结构原理分析及控制策略的设计能力;对学生进行职业意识培养和职业道德教育,提高学生的综合素质与职业能力,增强学生适应职业变化的能力,为学生职业生涯的发展奠定基础。 三、课程设计理念 《电机驱动技术》课程的设计以生产实际中的具体案例为主,其服务目标是以就业为导向,以能力为本位,以素质为基础。注重实用性,坚持以实为本,避开高深理论推导和内部电路的过细研究,适当降低理论教学的重心,删除与实际工作关系不大的繁冗计算,注重外部特性及连线技能,同时兼顾对学生素质、能力的培养,做到既为后续课程服务,又能直接服务于工程技术应用能力的培养。 四、课程目标 学生通过学习《电机驱动技术》课程,使学生能掌握机电设备常使用的几种电动机--直流电动机、交流感应电动机、交流永磁电动机和开关磁阻电动机的结构、原理及应用以及驱动电动机的结构及其控制方法。熟悉电机调速、分析及控
制。结合生产生活实际,培养学生对所学专业知识的兴趣和爱好,养成自主学习与探究学习的良好习惯,从而能够解决专业技术实际问题,养成良好的工作方法、工作作风和职业道德。 【知识目标】 掌握驱动电机的结构原理及应用,掌握功率变换器电路及其应用技术,驱动电机控制技术及新型电机的结构特点与选用。 【能力目标】 能对对驱动电机各种控制电路进行选择、应用和设计,能够准确描述各种电机控制技术的控制原理及特点,并针对不同电机选用不同的控制方式。 【素质目标】 能整体把握驱动电机及控制技术的应用及在日后的工作中解决实际问题。培养学生实事求是的作风和创新精神,培养学生综合运用所学知识分析问题和解决问题的能力,培养学生一丝不苟的工作作风和良好的团队协作精神。 五、课程内容设计 根据学院对机电一体化专业人才培养方案的要求,结合就业岗位的技能需求,按照职业教育理念,本课程设计了三个教学项目,具体内容如下:
浅谈光伏发电系统用逆变器的基本知识 逆变器的概念 通常,把将交流电能变换成直流电能的过程称为整流,把完成整流功能的电路称为整流电路,把实现整流过程的装置称为整流设备或整流器。与之相对应,把将直流电能变换成交流电能的过程称为逆变,把完成逆变功能的电路称为逆变电路,把实现逆变过程的装置称为逆变设备或逆变器。 现代逆变技术是研究逆变电路理论和应用的一门科学技术。它是建立在工业电子技术、半导体器件技术、现代控制技术、现代电力电子技术、半导体变流技术、脉宽调制(PWM)技术等学科基础之上的一门实用技术。它主要包括半导体功率集成器件及其应用、逆变电路和逆变控制技术3大部分。 逆变器的分类 逆变器的种类很多,可按照不同的方法进行分类。 1.按逆变器输出交流电能的频率分,可分为工频逆变器、中频逆器和高频逆变器。工频逆变器的频率为50~60Hz的逆变器;中频逆变器的频率一般为400Hz到十几kHz;高频逆变器的频率一般为十几kHz到MHz。 2.按逆变器输出的相数分,可分为单相逆变器、三相逆变器和多相逆变器。3.按照逆变器输出电能的去向分,可分为有源逆变器和无源逆变器。凡将逆变器输出的电能向工业电网输送的逆变器,称为有源逆变器;凡将逆变器输出的电能输向某种用电负载的逆变器称为无源逆变器。 4.按逆变器主电路的形式分,可分为单端式逆变器,推挽式逆变器、半桥式逆变器和全桥式逆变器。 5.按逆变器主开关器件的类型分,可分为晶闸管逆变器、晶体管逆变器、场效应逆变器和绝缘栅双极晶体管(IGBT)逆变器等。又可将其归纳为“半控型”逆
变器和“全控制”逆变器两大类。前者,不具备自关断能力,元器件在导通后即失去控制作用,故称之为“半控型”普通晶闸管即属于这一类;后者,则具有自关断能力,即无器件的导通和关断均可由控制极加以控制,故称之为“全控型”,电力场效应晶体管和绝缘栅双权晶体管(IGBT)等均属于这一类。 6.按直流电源分,可分为电压源型逆变器(VSI)和电流源型逆变器(CSI)。前者,直流电压近于恒定,输出电压为交变方波;后者,直流电流近于恒定,输也电流为交变方波。 7.按逆变器输出电压或电流的波形分,可分为正弦波输出逆变器和非正弦波输出逆变器。 8.按逆变器控制方式分,可分为调频式(PFM)逆变器和调脉宽式(PWM)逆变器。 9.按逆变器开关电路工作方式分,可分为谐振式逆变器,定频硬开关式逆变器和定频软开关式逆变器。 10.按逆变器换流方式分,可分为负载换流式逆变器和自换流式逆变器。 逆变器的基本结构 逆变器的直接功能是将直流电能变换成为交流电能 逆变装置的核心,是逆变开关电路,简称为逆变电路。 该电路通过电力电子开关的导通与关断,来完成逆变的功能。电力电子开关器件的通断,需要一定的驱动脉冲,这些脉冲可能通过改变一个电压信号来调节。产生和调节脉冲的电路。通常称为控制电路或控制回路。逆变装置的基本结构,除上述的逆变电路和控制电路外,还有保护电路、输出电路、输入电路、输出电路等,如图2所示。 逆变器的工作原理。
2.逆变器并联下垂控制原理: 01 Z 02Z 22 ?∠?1V ?∠? 图1.两台逆变器并联运行的等效电路 图1中,运用电路理论的知识,并忽略阻抗01 Z 和02Z 中的阻性部分,可得出逆变器1输出地有功功率 和无功功率的表达式为: 1101 sin VV P X ?=? 21101 cos VV V Q X ??-= 在并联逆变器输出电压相角??很小的情况下,sin ???≈?和cos 1??≈ 成立。将其代入有功功率和无功功率的公式可以知,逆变器输出地有功功率主要由相角差??决定,而无功功率主要由幅值X V 决定。 基于以上分析,在逆变器并联系统中可以借助同步发电机的自下垂特性,引入有功功率和无功功率的调节作用,分别来调节逆变器输出电压的幅值和频率,即: 0x x x x m P ωω=-
0x x x x V V n Q =- 其中,x ω、0 x V 分别为x 台逆变器空载时输出电压的频率和幅值,x m 、x n 分别为x 台逆变器输出电压的频率、幅值的下垂系数,如下图2所示。图2(a )可以看出,由于逆变器自身特性的差异所造成的逆变器并联运行时输出功率的差异随着频率和幅值下垂系数的增大而减小,但是随着下垂系数的增大电压的偏离度也会随之增大。因此在实际设计中需要在负载均分度和电压偏离度之间进行折中考虑。图2(b )表明利用下垂特性选择不同的下垂系数,可以使不同容量的逆变器并联运行并按其单位容量均分负载,其下垂系数选择如下: 11221122x x x x m S m S m S n S n S n S == ====
图2.频率和幅值下垂特性 3.控制方法: 实际应用的外特性下垂并联控制方法主要是两种:一、负载电流前馈方式,二、减弱电压控制环方式。 负载电流前馈控制方法的特点是各个模块的电压调节器均为无静差的PI调节器,且电压环给定随着负载电流的增大而减小。 减弱电压环的控制框图如图3所示:
考试题型: 一、选择题(30分); 二、判断题(20分); 三、问答题(15分); 四、计算题(15分); 五、设计(电路图)(20分)。 一、选择题(30) 1、一台他励直流电动机拖动恒转矩负载,当电枢电压降低时,电枢电流和转速将( 3 )。 (1)电枢电流减小、转速减小 (2)电枢电流减小、转速不变(3)电枢电流不变、转速减小 (4)电枢电流 不变、转速不变 2、一台直流发电机由额定运行状态转速下降为原来的50%,而励磁电流和电枢电流保持不变,则( 1 )。 (1)电枢电势下降50% (2)电磁转矩下降50% (3)电枢电势和电磁转矩都下降50% (4)端电压下降50% 3、一台直流电动机起动时,励磁回路应该( 3 )。 (1)与电枢回路同时接入 (2)比电枢回路后接入 (3)比电枢回路先接入(4)无先后次序 4、定子三相绕组中通过三相对称交流电时在空间会产生( 2 )。 (1) 气隙磁场 (2)旋转磁场 (3)对称磁场 (4) 脉动磁场 5、热继电器是利用( 1 )来切断电路的保护电器。 (1) 电流的热效应 (2) 电流的磁效应 (3) 电压的热效应 (4) 速度 6、交流接触器上的短路环的作用是减少吸合时产生的( 1 )。 (1) 振动(2)热量 (3)磁场 (4)电流 7、长期带额定负载运行的交流接触器,其额定电流通常选( 3 )。 (1)小于负载额定电流 (2)等于负载额定电流(3)负载额定电流的1.3—2倍 (4)愈大愈好 8、已知一台异步电动机的额定转速n=970r/min,则该电动机的额定转差率SN为( 3 ) (1) 0.01 (2) 0.02 (3) 0.03 (4) 0.04 9、一般对于经常起动的电动机来说,如果它的容量( 1 )就可以直接起动。 (1)小于供电变压器容量的20%(2)大于供电变压器容量的20%(3)等于供电变压器的容量(4)小于供电变压器容量的50% 10、熔断器是用于供电线路和电气设备( 3 )保护的电器 (1) 过载 (2) 过流(3) 短路 (4) 过压 1、原理图中,各电器的触头都按 ( B ) 时的正常状态画出。 A.通电 B. 没有通电或不受外力作用 C.受外力 D 动作 2、热继电器是对电动机进行(C )保护的电器。 A.过流 B. 短路 C. 过载 D 过压 3、三相异步电动机有一相断路而成单相运行时,则 ( A ) A 电流变大而输出转矩变小 B 电流和输出转矩都变大 C 电流和输出转矩都不变 D电流和输出转矩都变小 4、直流电动机的几种人为机械特性中,哪种的硬度不变?( B ) A 电枢串电阻的人为机械特性 B 改变电枢电压的人为机械特性 C 减弱磁通的人为机械特性 D 以上三种都不是 5、下面对异步电动机降低定子电压的人为机械特性的描述,哪种是正确的?(C ) A 最大转矩Tm不变,临界转差率Sm不变B最大转矩Tm不变,临界转差率Sm变大 C 最大转矩Tm降低,临界转差率Sm不变 D 最大转矩Tm降低,临界转差率Sm变小
现代控制理论与电机控制 刘北 070301071 电气工程及其自动化0703班 现代控制理论在电机控制中的具体应用: 自70年代异步电动机矢量变换控制方法提出,至今已获得了迅猛的发展。这种理论的主要思想是将异步电动机模拟成直流机,通过坐标变换的方法,分别控制励磁电流分量与转矩电流分量,从而获得与直流电动机一样良好的动态调速特性。这种控制方法现已较成熟,已经产品化,且产品质量较稳定。因为这种方法采用了坐标变换,所以对控制器的运算速度、处理能力等性能要求较高。近年来,围绕着矢量变换控制的缺陷,如系统结构复杂、非线性和电机参数变化影响系统性能等等问题,国内、外学者进行了大量的研究。伴随着推进矢量控制、直接转矩控制和无传感器控制技术进一步向前发展的是人工智能控制,这是电机现代控制技术的前沿性课题,已取得阶段性的研究成果,并正在逐步实用化。 矢量控制和直接转矩控制技术的一个新的发展方向是直接驱动技术,这种零方式消除了传统机械传动链带来的一系列不良影响,极大地提高了系统的快速响应能力和运动精度。但是,这种机械上的简化,导致了电机控制上的难度。为此,需要电机控制技术的进一步提高和创新。这正是电机现代控制技术有待深入研究和具有广阔开发前景的新领域。 电机的现代控制技术与先进制造装备息息相关,已在为先进制造技术的重要研究领域之一,国内很多学者和科技人员正在从事这方面的研究和开发。 一、三相感应电动机的矢量控制 1、 定、转子磁动势矢量 三相感应电动机是机电能量转换装置,这种的物理基础是电磁间的相互作用或者磁场能量的变化。因此,磁场是机电能量转换的媒介,是非常重要的物理量。为此,对各种电动机都要了解磁场在电动机空间内的分布情况。感应电动机内磁场是由定、转子三相绕组的磁动势产生的,首先要确定电动机内磁动势的分布情况。对定子三相绕组而言,当通以三相电流A i 、B i 、C i 时,分别产生沿着各自绕组轴线脉动的空间磁动势波,取其基波并记为A f 、B f 、C f ,显然它们都是空间矢量。对于分布和短矩绕组,定义正向电流产生的空间磁动势波基波的轴线为该相绕组的轴线,亦即A f 、B f 、C f 是以ABC 为轴线沿圆周正弦分布的空间矢量,各自的幅值是变化的,取决于相电流的瞬时值,即有
功率下垂控制原理对逆变器并联系统的按容分配负荷问题 南昌航空大学信息工程学院、科华恒盛股份有限公司、钦州学院物理与电子工程学院的研究人员刘斌、卢雄伟、熊勇等,在2015年第21期《电工技术学报》上撰文,对于非同等功率等级的逆变器无线并联系统而言,因为均分系统负荷可能导致小容量逆变器无法工作,所以必须让负荷按照正比于逆变器模块容量的方式实现分配。 围绕下垂控制原理,通过对输出电压幅值和频率进行收敛性分析,推导出逆变负荷按容分配的充分条件,这一充分条件对下垂控制系数的确定具有很好的指导作用。此外,通过引入虚拟阻抗法和双环调节器,搭建了由两台不同容量的逆变器组成的微电网系统。最后通过仿真和实验验证了该理论分析的有效性。 一方面,随着国民经济的发展,电力需求也在迅速增长,但一味地扩大电网规模不能满足电力供应的要求。另一方面,20世纪60年代的几次大型停电事故引发了科研人员对分布式发电系统潜在效益的重视。分布式电源尽管优点突出,但是它相对于电网而言是一个不可控源,微电网便是在这种环境下应运而生的。 它从系统角度出发将分布式电源、负荷、储能装置及控制装置等模块看成一个单一可控的单元,既可以与电网联网运行,也可以在电网出现故障或系统需要脱网时与主网断开单独运行。微电网的这种灵活可调度性,使得它可以成为未来大型电网的有力补充和有效支撑,也正因为如此,近年来关于微电网的研究引起了社会和学术界的广泛关注。 在微电网控制策略中,最常见的有三种。即在并网运行时采用PQ控制,在孤岛运行时采用V/f控制或者下垂(droop)控制。由于本文侧重考虑的是微电网孤岛运行时的负荷分配问题,而基于单个V/f微电源主从控制方式对主控电源的容量要求较高,整个微电网对主电源依赖性过高,因此最终选用基于下垂控制的微电源对等控制方式作为本文负荷分配的控制策略。 此外,依据逆变器之间是否存在互联线,可以将逆变器并联技术分成有互联线并联和无互联线并联两大类,前者因为有互联线的存在而限制了逆变器模块之间的距离,相比而言无互联线并联技术具有更好的发展前景。其中,实现无互联线并联技术[7-8]的关键是按照输
1.机电能量转换:dt时间内磁能的变化d W m=ΨA di A+ΨB di B+i A i BeL AB(θr)/eθr dθr,由绕组A和B中变压器电动势从电源所吸收的全部电能加之运动电动势从电源所吸收电能的一半所组成;由运动电动势吸收的另外一半电能成为转换功率,成为机械功率。产生感应电动势是耦合场从电源吸收电能的必要条件,产生运动电动势是通过耦合场实现机电能量转换的关键。转子在耦合场中运动产生电磁转矩,运动电动势和电磁转矩构成一对机电耦合项,是机电能量转换的核心部分。 2.磁阻转矩:t e=?0.5 L d?L q i A2sin2θr。当转子凸极轴线与定子绕组轴线重合,此时气隙磁导最大,定义此时定子绕组的自感为直轴电感L d;当转子交轴与定子绕组轴线重合,此时气隙磁导最小,定义此时定子绕组的自感为交轴电感L q;因此在转子旋转过程中,定子绕组的自感将发生变化。由于转子运动使气隙磁导发生变化而产生的电磁转矩称为磁阻转矩。转子励磁产生的电磁转矩称为励磁转矩。 3.直流电机电磁转矩:主磁极基波磁场轴线定义为d(直)轴,d轴反时针旋转90°定义为q(交)轴。直流电动机的电枢绕组又称为换向器绕组,其特征:电枢绕组本来是旋转的,但在电刷和换向器的作用下,电枢绕组产生的基波磁场轴线在空间却固定不动。在动态分析中,常将换向器绕组等效为一个单线圈,若电刷放在几何中性线上,单线圈的轴线就被限定在q轴,称为q轴线圈。因q轴磁场在空间是固定的,当q轴磁场变化时会在电枢绕组内感生变压器电动势;同时它又在旋转,在d轴励磁磁场作用下,还会产生运动电动势,q轴线圈为能表示出换向器绕组这种产生运动电动势的效应,它应该也是旋转的。这种实际旋转而在空间产生的磁场却静止不动的线圈具有伪静止特性,称为伪静止线圈,它完全反映了换向器绕组的特征,可以由其等效和代替实际的换向器绕组。电磁转矩t e=Ψf i a,控制i f不变,改变i a即改变t e,线性控制良好。转子产生运动电动势,不断吸收电能,同时将电能转换为机械能,此时转子成为了能量转换的“中枢”,因此称为电枢。 4.三相异步电机电磁转矩:其运行原理是①定子三相绕组通入三相对称正弦电流,②将会在气隙中产生正弦分布的两极旋转磁场,当转子静止不动时,由电磁感应原理,定子旋转磁场将在转子绕组中感生出三相对称正弦电流,其同样会在气隙中产生两极旋转磁场,旋转速度和方向与定子旋转磁场相同,但存在相位差,③定、转子旋转磁场相互作用产生电磁转矩,若其大于负载转矩,转子将开始旋转,而转子速度总是小于定子旋转磁场速度,否则转子绕组不会感生电流,电磁转矩也将消失,所以称为异步电机。当转子速度稳定于ωr,与定子旋转磁场的转速差为Δω=ωs?ωr,可用转差率s表示这种速度差,即s=(ωs?ωr)/ωs。气隙旋转磁场在转子绕组中感生的三相对称电流频率为ωf,ωf=ωs?ωr=sωs,称为转差频率。 5.磁动势矢量:通过控制三相电流(时间变量)能控制三相绕组的基波磁动势波(空间矢量)。f s运动轨迹圆形,圆的半径是每相基波磁动势最大幅值的3/2倍。 6.三相感应电机定、转子磁链:Ψs=Ψsσ+Ψg,Ψr=Ψrσ+Ψg,Ψg=Ψsg+Ψrg,其中Ψsσ=L sσi s,Ψrσ=L rσi r,Ψsg=L m i s,Ψrg=L m i r,根据上式能够完成矢量图的绘制。Ψg是气隙磁链矢量,Ψs和Ψr是
一、论述PMSM 转矩生成及其控制 要求: 1.面装式PMSM 定子磁场矢量方程为f s s s ψi ψ+=L ,说明PMSM 内存在哪三个正弦分布磁场,为什么可以其中任何两个磁场相互作用来表达电磁转矩生成,试分别推导其相应的电磁转矩矢量方程。 答:在面装式PMSM 中,存在由永磁体产生的励磁磁场f ψ,由定子电流矢量s i 产生的电枢磁场s s i L 和由两者合成而得的定子磁场s ψ。转矩生成的本质就是两个磁场相互作用生成的,所以PMSM 中的电磁转矩可以由任何两个磁场的相互作用来表示。 电磁转矩可以看成是由转子磁场与电枢磁场相互作用生成的,其表达式为: ?=f e p t ψ s i =()s 1i s f s L L p ?ψ 电磁转矩也可以看成是定子磁场与电枢磁场相互作用生成的,其表达式为: ()()s s s 11i i i s s s s s f s e L L p L L L p t ?=?+=ψψ 电磁转矩也可以看成由转子磁场与定子磁场相互作用生成的,其表达式为: ()s f s f s s s e L p L L p t ψ ψ ψ ψ?= +?=11s i 。 其相应的推导过程如下: 电磁转矩t e ,机械角速度Ωr ,机械功率P m 以及机械能W m 之间有如下的关系,即 dt dWm Pm r te = =Ω (1) 由式(1)可以推导出电磁转矩矢量表达式。为此可先推导机械能量dW m 的方程。 根据机-电能量转换原理,向电动机输入的电能We 应包括以下几个部分的能量,即 W e =W r +W f +W m (2) 式中,W r 为定、转子损耗掉的能量;W f 为磁场储能。于是有 dW e =dW r +dW f +dW m (3) 下面推导式(3)右端三项的表达式。 假定定子没有零序分量,则有 dWe=Re(u s i s +u r i r )dt (4) W r 中应该包括定、转子绕组的电阻损耗,磁性材料中的磁滞和涡流损耗、风耗
第5章单相并网逆变器 后级的DC- AC部分,采用单相全桥逆变电路,将前级 DC- DC输出的400V 直流电转换成220V/50Hz 正弦交流电,完成逆变向电网输送功率。光伏并网逆变器实现并网运行必须满足要求:输出电压与电网电压同频同相同幅值,输出电流与电网电压同频同相(单位功率因数),而且其输出还应满足电网的电能质量要求,这些都依赖于逆变器的有效并网控制策略。 光伏并网逆变器拓扑结构 按逆变器主电路的拓扑结构分类,主要有推挽逆变器、半桥逆变器和全桥逆变器。 5.1.1推挽式逆变电路 推挽式逆变电路由两只共负极的功率开关元件和一个原边带有中心抽头的升压变压器组成。它结构简单,两个功率管可共同驱动,两个开关元件的驱动电路具有公共地,这将简化驱动电路的设计。 U 图5-1 推挽式逆变器电路拓扑 推挽式电路的主要缺点是很难防止输出变压器的直流饱和,另外和单电压极性切换的全桥逆变电路相比,它对开关器件的耐压值也高出一倍。因此适合应用于直流母线电压较低的场合。此外,变压器的利用率较低,驱动感性负载困难。推挽式逆变器拓扑结构如图5-1 所示。 5.1.2半桥式逆变电路 } 半桥式逆变电路使用的功率开关器件较少,电路结构较为简单,但主电路的交流输出电压幅值仅为输入电压的一半,所以在同等容量条件下,其功率开关的额定电流要大于全桥逆变电路中功率元件额定电流,数值为全桥电路的2 倍。由于分压电容的作用,该电路具有较强的抗电压输出不平衡能力,同时由于半桥
式逆变电路控制较为简单,且使用元件少、成本低,因此在小功率等级的逆变电源中常被采用。其主要缺点是直流侧电压利用率低,在同样的开关频率下电网电流的谐波较大。 图5-2 半桥式逆变器电路拓扑 5.1.3全桥式逆变电路 全桥逆变电路可以认为是由2 个半桥逆变电路组成的,在单相电压型逆变电路中是应用最多的电路,主要用于大容量场合。在相同的直流输入电压下,全桥逆变电路的最大输出电压是半桥式逆变电路的2 倍。这意味着输出功率相同时,全桥逆变器的输出电流和通过开关元件的电流均为半桥式逆变电路的一半。 本文采用的是单相全桥式逆变器,其拓扑结构如图5-3 所示,它结构简单且易于控制,在大功率场合中广为应用,可以减少所需并联的元件数。其不足是要求较高的直流侧电压值。 图5-3 单相全桥逆变器电路拓扑 光伏并网逆变器的控制 光伏并网逆变器按控制方式分类,可分为电压源电压控制、电压源电流控制、电流源电压控制和电流源电流控制四种方法。以电流源为输入的逆变器,其直流侧需要串联大电感提供稳定的直流电流输入,但由于此大电感往往会导致系统动态响应差,因此当前大部分并网逆变器均采用以电压源输入为主的方式,即电压型逆变器。采用电压型逆变主电路,可以实现有源滤波和无功补偿的控制,在实际中已经得到了广泛的研究和应用,同时可以有效地进行光伏发电、提高供电质
2.逆变器并联下垂控制原理: 01 Z 02 Z 22 ?∠?1V ?∠? 图1.两台逆变器并联运行的等效电路 图1中,运用电路理论的知识,并忽略阻抗01Z 和02Z 中的阻性部分,可得出逆变器1输出地有功功率和无功功率的表达式为: 1 101 sin VV P X ?= ? 2 1101 cos VV V Q X ??-= 在并联逆变器输出电压相角??很小的情况下,s i n ???≈?和 cos 1??≈ 成立。将其代入有功功率和无功功率的公式可以知,逆变器输出地有功 功率主要由相角差??决定,而无功功率主要由幅值X V 决定。 基于以上分析,在逆变器并联系统中可以借助同步发电机的自下垂特性,引入有功功率和无功功率的调节作用,分别来调节逆变器输出电压的幅值和频率,即: 0x x x x m P ωω=- 0x x x x V V n Q =- 其中,x ω、0x V 分别为x 台逆变器空载时输出电压的频率和幅值,x m 、x n 分别为x 台逆变器输出电压的频率、幅值的下垂系数,如下图2所示。图2(a )可以看出,由于逆变器自身特性的差异所造成的逆变器并联运行时输出功率的差异随着频率和幅值下垂系数的增大而减小,但是随着下垂系数的增大电压的偏离度也会随之增大。因此在实际设计中需要在负载均分度和电压偏离度之间进行折中考虑。图2(b )表明利用下垂特性选择不同的下垂系数,可以使不同容量的逆变器并联运行并按其单位容量均分负载,其下垂系数选择如下: 11221122x x x x m S m S m S n S n S n S ===== =
图2.频率和幅值下垂特性 3.控制方法: 实际应用的外特性下垂并联控制方法主要是两种:一、负载电流前馈方式,二、减弱电压控制环方式。 负载电流前馈控制方法的特点是各个模块的电压调节器均为无静差的PI调节器,且电压环给定随着负载电流的增大而减小。 减弱电压环的控制框图如图3所示: 图3.减弱电压环方式的控制框图
不同容量逆变器并联技术研究开题报告 一、文献综述 1 国内外研究现状 早在 20 世纪 70 年代,就有学者提出将逆变器进行并联运行,并且开始对逆变器并联控制技术研究进行研究。到上世纪 90 年代中期,一些发达国家已经将并联逆变器投入生产,并投入实用。如日本的梅兰日兰公司、三菱公司、东芝公司,美国的 APC 公司、Libert公司,德国的西门子公司等[3]。 在我国,对于逆变器并联技术和逆变器模块化生产的研究起始于上世纪 90年代,相对于世界发达国家起步较晚。目前,主要是一些高校对这一领域进行了相关的研究。例如国内比较知名的西安交通大学、华中科技大学、南京航空航天大学、浙江大学等。这些高校对于逆变器并联技术方面的研究在国内处于领先地位。与此同时,意识到并联逆变器的重要性,国内其他一些高校也先后加入了这一研究领域。但是由于起步较晚,大多数高校在这个领域的研究都还处于试验阶段。国内一些致力于电源研究和生产的企业,如台达、埃默森、华为等,在这方面也做了大量的工作,并且也有企业生产出了相关的产品。但其性能有待于实践检验[3]、[4]。 1.1 逆变器独立运行控制技术 逆变器因调制带来了谐波,滤波器在消除谐波的同时也带来了系统的过渡过程与稳定性问题。因此,系统需要调节器来实现其所需的稳态性能与动态性能,调节器的实现方式有以下控制方式。 1.1.1 PID控制 在实际工程中,应用最为广泛的调节控制为比例积分微分控制,即PID控制,PID控制结构简单、稳定性好,工作可靠、调整方便[6]。其传递函数为 PID控制通过调节、、这3个参数来起作用的。这3个参数取值的不同,其比例、积分、微分的作用强弱就不同。对于P调节器,随着值的加大,闭环系统的超调量加大,系统响应速度加快。若超过一定值,则系统变得不稳定。对于PI调节器,随着值的加大,闭环系统的超调减小,系统响应速度略微变慢。对于PID调节器,由于微分环节的作用,在曲线的起始上升段呈现尖锐的波峰,之后曲线也呈衰减震荡。随着值的加大,闭环系统的超调量增大,但经过曲线尖锐的起始上升段后响应速度有所变慢。 1.1.2 谐振控制 由于PI控制器在跟踪正弦信号时会出现稳态误差,比例谐振控制可以对某一固定频率的正弦指令信号实现无静差跟踪,并可以有针对性地消除某些频率的谐
交流电机控制技术作图题交流电机控制技术的发展与展望引言与直流电机相比,交流电动机是多变量,强耦和的非线形系统,要实现良好的转矩控制非常困难。20世纪70年代德国工程师F.Blaschke首先提出异步电动机矢量控制理论来解决交流电机转矩控制问题。1985年,德国的Depenbrock教授提出了异步电动机直接转矩控制方法。近年来,矢量控制和直接转矩控制技术不断发展,且有各自不同的应用领域。随着现代控制理论和电子技术的发展,各种控制方法和器件不断出现。 矢量控制技术的现状与展望 矢量控制新技术 磁通的快速控制:在直接磁场定向矢量控制异步电动机变频调速系统中,利用磁链预测值进行磁通快速控制的方法。 参数辨识和调节器自整定:基于模型参考自适应算法的一惯性系统及二惯性系统转动惯量参数的辨识方法。
非线性自抗扰控制器:在异步电动机系统的动态方程中,用自抗扰控制器取代经典PID控制器进行控制。 矩阵式变换器:一种适用于矩阵式变换器驱动异步电动机调速系统的组合控制策略,同时实现了矩阵式变换器的空间矢量调制和异步电动机的直接磁场定向矢量控制。 矢量控制技术的发展 矢量采用高速电动机控制专用DSP、嵌入式实时软件操作系统,开发更实用的转子磁场定向方法和精确的磁通观测器,使变频器获得高起动转矩、高过载能力,将是未来矢量控制技术的重要发展方向。无速度传感器的交流异步电动机驱动系统和永磁电动机驱动系统控 制也是开发热点之一。永磁电动机驱动系统由于它的高效、高功率因数、高可靠性而得到越来越多的关注。无刷电动机的无位置传感器控制和正弦波电流控制,在应用方面已趋成熟。开关磁阻电动机在许多领域应用也取得了很多进展。
串联逆变器和并联逆变器的差别,源于它们所用的振荡电路不同,前者是用L、R和C串联,后者是L、R和C并联。 1、串联逆变器的负载电路呈现低阻抗,要求电压源供电,直流电源末端,必须并接大的滤波电容器。当逆变失败时,浪涌电流大,保护困难。 并联逆变器的负载电路呈现高阻抗,要求由电流源供电,需在直流电源末端串接大电抗器。但在逆变失败时,由于大电感的限流作用,冲击不大,较易保护。 2、串联逆变器输出电压为矩形波,输出电流近似正弦波,换流是在晶闸管上电流过零以后进行,因而电流总是超前电压 并联逆变器输出电压近似正弦波,输出电流为矩形波,换流是在谐振电容器上电压过零以前进行,负载电流也总是超前于电压。 两者都是工作在容性负载状态。 3、串联逆变器是恒压源供电,为避免逆变器的上、下桥臂晶闸管同时导通,造成电源短路,换流时,必须保证先关断,后开通。 并联逆变器是恒流源供电,为避免滤波电抗产生大的感生电势,电流必须连续。必须保证逆变器上、下桥臂晶闸管在换流时,是先开通后关断。 4、串联逆变器的工作频率必须低于负载电路的固有振荡频率。并联逆变器的工作频率必须略高于负载电路的固有振荡频率。 5、串联逆变器的功率调节方式有二:改变直流电源电压或改变晶闸管的触发频率。 并联逆变器的功率调节方式,一般只能是改变直流电源电压。改变逆变引前角也能使功率增大,但所允许调节范围小。 (6)串联逆变器在换流时,晶闸管是自然关断的,关断时间短,损耗小。 并联逆变器在换流时,晶闸管是强迫关断的,关断时间较长。损耗较大。 相比之下,串联逆变器适合在高频感应加热装置中使用。 (7)串联逆变器的晶闸管所需承受的电压较低,用380V电网供电时,采用1200V的晶闸管就行,但负载电路的全部电流,包括有功和无功分量,都需流过晶闸管。逆变晶闸管丢失脉冲,只会使振荡停止,不会造成逆变颠覆。 并联逆变器的晶闸管所需承受的电压高,其值随功率因数角甲增大,而迅速增加。但负载本身构成振荡电流回路,只有有功电流流过逆变晶闸管,而且逆变晶闸管偶而丢失触发脉冲时,仍可维持振荡,工作较稳定。 (8)串联逆变器可以自激工作,也可以他激工作。他激工作时,只需改变逆变触发脉冲频率,即可调节输出功率;而并联逆变器一般只能工作在自激状态。 (9)在串联逆变器中,晶闸管的触发脉冲不对称,不会引入直流成分电流而影响正常运行;而在并联逆变器中,逆变晶闸管的触发脉冲不对称,则会引入直流成分电流而引起故障。 (10)串联逆变器起动容易,适用于频繁起动工作的场合;而并联逆变器需附加起动电路,起动较为困难。 (11)串联逆变器中的晶闸管由于承受矩形波电压,故晶闸管承受电压上升率较大较大,吸收电路起着关键作用,而对其电流上升率要求则较低。 在并联逆变器中,流过逆变晶闸管的电流是矩形波,因而要求大的电流上升率,而对电压上升率du/dt的要求则低一些。 (12)串联逆变器的感应加热线圈与逆变电源(包括槽路电容器)的距离远时,对输出功率的影响较小。如果采用同轴电缆或将来回线尽量靠近(扭绞在一起更好)敷设,则几乎没有影响。 而对并联逆变器来说,感应加热线圈应尽量靠近电源(特别是槽路电容器),否则功率输出和效率都会大幅度降低。
逆变器的并联运行技术 类别:电源技术阅读:1220 作者:南京航空航天大学邢岩戚惠严仰光赵修科(南京210016) 来源:《电源技术应用》 摘要:介绍多个电源模块并联使用时,会产生的问题及其解决方法。关键词:电源模块并联运行均流 信息技术的迅速发展,对其供电系统的容量、性能和可靠性要求越来越高,也推动着电力电子技术的研究不断深入,研究领域不断拓宽。多模块并联实现大容量电源被公认为当今电源变换技术发展的重要方向之一。多个电源模块并联,分担负载功率,各个模块中主开关器件的电流应力大大减小,从根本上提高可靠性、降低成本。同时,各模块的功率容量减小而使功率密度大幅度提高。另外,多个模块并联,可以灵活构成各种功率容量,以模块化取代系列化,从而缩短研制、生产周期和降低成本,提高各类开关电源的标准化程度、可维护性和互换性等。 80年代国外开始研究DC/DC变换器并联运行技术,现已取得实用性的成果,而新的均流技术、系统稳定性等方面的研究仍在不断深入。同主电路和控制电路的研究发展过程一样,逆变器并联运行技术的研究也是在借鉴DC/DC并联技术的基础上不断深入。但由于是正弦输出,其并联运行远比直流电源困难,首先要解决三个问题: (1)两台或多台投入运行时,相互间及与系统的频率、相位、幅度必须达到一致或小于容许误差时才能投入,否则可能给电网造成强烈冲击或输出失真。而且并联工作过程中,各逆变器也必须保持输出一致,否则,频率微弱差异的积累将造成并联系统输出幅度的周期性变化和波形畸变;相位不同使输出幅度不稳。 (2)功率的分配包括有功和无功功率的平均分配,即均流包括有功和无功均流。直流电源的均流技术不能直接采用。 (3)故障保护。除单机内部故障保护外,当均流或同步异常时,也要将相应逆变器模块切除。必要时还要实现不中断转换。 目前,实现逆变器并联运行的几类典型方法有: 1 自整步法[1][2][3] 并联系统中各模块是等价的,没有专门的控制模块。通过模块间的均流线实现同步和均流,源于航空恒速恒频(CSCF)电源的自整步并联技术[2]。其基本原理是(见图1): 以两路并联为例。当两通道的输出电压略有偏差时,将会有偏差电压存在。幅度偏差引起的与、基本上同相,见图1(c),相位偏差引起的与、基本上垂直(超前90°),见图1(b),尽量减小、
江苏安全技术职业学院汽车运用安全管理专业 《驱动电机及控制技术》课程标准 一、课程性质 本课程是三年制高等职业学校新能源汽车运用与维修专业必修的一门专业核心课程。是在汽车电工电子、汽车机械基础等课程基础上,开设的一门综合性较强的核心课程,其任务是使学生掌握常用电动机的结构及其控制方法,培养学生对新能源汽车常用电动机的结构原理分析及控制策略的设计能力;对学生进行职业意识培养和职业道德教育,提高学生的综合素质与职业能力,增强学生适应职业变化的能力,为学生职业生涯的发展奠定基础。 二、学时与学分 本课程建议课时为80课时,本课程的总学分为5学分。 三、课程设计思路 本课程学习方式的多样化。推行项目教学、案例教学、工作过程导向教学等教学模式,分知识模块来实施。 1、课程定位 本课程的开设是通过深入企业调研,与专业指导委员会专家共同论证,根据工作任务与职业能力分析,以必须、够用为度,以掌握知识、强化应用、培养技能为重点,以新能源汽车相关工作任务为依据设置本课程。 2、目标确立 依据新能源汽车运用与维修专业人才培养方案中确定的培养目标、综合素质、职业能力,按照知识与技能、过程与方法、情感态度与价值观三个维度,突出核心素养和关键能力,结合本课程的性质和职业教育课程教学的最新理念,确定课程目标。 3、教学内容确定 依据《驱动电机及控制技术》课程所对应工作的基本内容,将本课程划分为驱动电机基础知识、常用驱动电机、功率变换器、功率变换器应用技术、驱动电机控制技术和新型驱动电机等几大部分,在设计上强调学生学习自主性。内容上以任务为导向,强化知识与信息的应用,弱化知识的了解与背诵;教学指导上合乎以学生为中心,重视学习成果的展示分享,让学习者在享受成就感的前提下,兴趣盎然地完成学习任务,达到单元学习目标。 四、课程目标 学生通过学习本课程,使学生能掌握新能源汽车中主要使用的几种电动机--直流电动机、交流感应电动机、交流永磁电动机和开关磁阻电动机的结构、原理及应用,以及新能源汽车驱动电动机的结构及其控制方法。熟悉对上述调速、分析及控制。结合生产生活实际,培养学生对所学专业知识的兴趣和爱好,养成自主学习与探究学习的良好习惯,从而能够解决专业技术实际问题,养成良好的工作方法、工作作风和职业道德。 核心素养和关键能力目标:
逆变电源并联技术 Parallel Strategy of Inverter 陈 宏 胡育文(南京航空航天大学航空电源科技重点实验室 210016) Chen Hong Hu Yuwen (Nanjing University of Aeronautics and Astronautics 210016 China) 摘要 逆变器并联是提高电源系统可靠性,扩充系统容量的有效方式。本文介绍了逆变电源并联的原理、技术要求和特点。对当前采用的逆变电源并联方案进行了总结和分类。在此基础上详细分析了各种并联方案的特点和内在关系,指出了逆变电源并联技术的发展趋势。 关键词:逆变电源 并联 环流中图分类号:TM464 Abstr act The parallel operation of inverter is not only a very useful method to increase the capac 2ity of power system,but also a good way to improve reliability of it 1This paper introduces the princi 2ple of inverter .parallel operation 1Several methods are summed up and classified 1Features and problems of these strategies are discussed and inner relationship has been described 1The developing process of in 2verter .s parallel is shown clearly in this paper 1 Keywor ds:Inverter,parallel,circumfluence 陈 宏 男,1972生,博士研究生,研究方向为电力电子与电力传动。胡育文 男,1944生,教授,博士生导师,研究方向为电力电子与电力传动。 1 前言 当前,交流电源供电方式正在由集中式向分布式、全功能式发展,而后者的技术核心就是模块化电源的并联技术,这是一个研究的热点。逆变电源的并联策略有很多,有主从结构[1],用电压型逆变器作为主模块控制系统电压,电流型逆变器提供负载电流。有对等式[2,4] ,并联的各个逆变器结构功能相同,相互间有信号的传递,但不存在隶属关系。还有基于有功无功调节的无连线并联方式[5,6]。本文重点讨论了并联的技术问题和各项并联方案的特点。 2 逆变器并联原理和特点 逆变器的并联需要满足5项条件,即电压、频 率、波形、相位、相序相同,只有这样才能消除环流、均分负载功率,达到最佳的运行状态。以下对 两台单相逆变器并联进行分析,图1中将逆变器简化为电压源加LC 滤波器的形式。根据图1中的电流电压关系得到电路方程(1) 如下 图1 逆变器并联电路图F ig 11 Circuit of parallel inverters U 1-J X L 1i L 1=U 0U 2-J X L 2i L 2=U 0 i L 1-i R 1-i C 1+i L 2-i R 2-i C 2=0U 0/R =i R 2+i R 1U 0#j X C 1=i C 1U 0#j X C 2=i C 2 (1) 设C 1=C 2=C,L 1=L 2=L ,由式(1)可得 第17卷第5期 电工技术学报 2002年10月