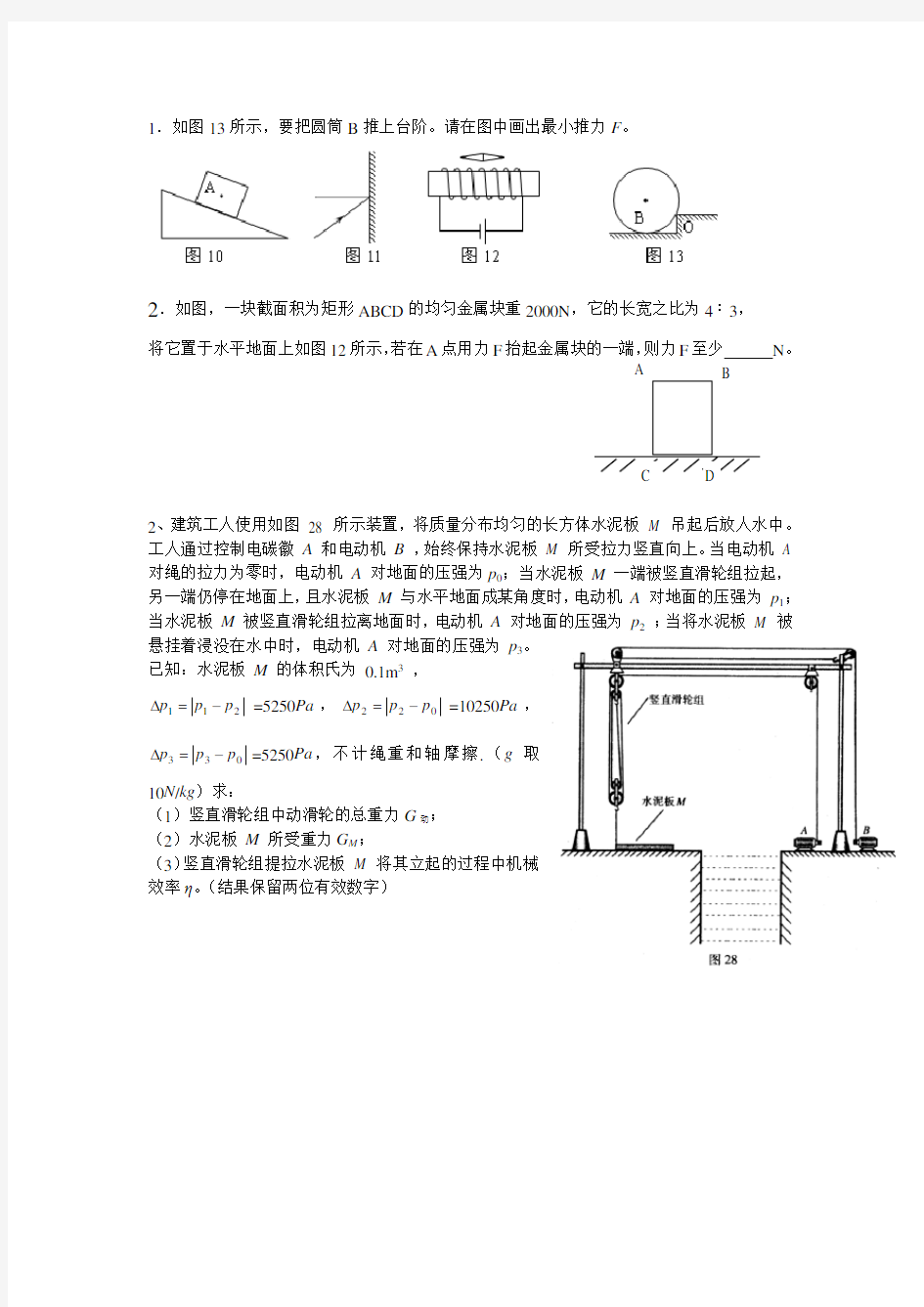
1.如图13所示,要把圆筒B 推上台阶。请在图中画出最小推力F 。
2.如图,一块截面积为矩形ABCD 的均匀金属块重2000N ,它的长宽之比为4∶3,
将它置于水平地面上如图12所示,若在A 点用力F
。
2、建筑工人使用如图 28 所示装置,将质量分布均匀的长方体水泥板 M 吊起后放人水中。工人通过控制电碳徽 A 和电动机 B ,始终保持水泥板 M 所受拉力竖直向上。当电动机 A 对绳的拉力为零时,电动机 A 对地面的压强为p 0;当水泥板 M 一端被竖直滑轮组拉起,另一端仍停在地面上,且水泥板 M 与水平地面成某角度时,电动机 A 对地面的压强为 p 1;当水泥板 M 被竖直滑轮组拉离地面时,电动机 A 对地面的压强为 p 2 ;当将水泥板 M 被悬挂着浸没在水中时,电动机 A 对地面的压强为 p 3。
已知:水泥板 M 的体积氏为 0.1m 3 ,
211p p p -=?=5250Pa ,022p p p -=?=10250Pa ,
033p p p -=?=5250Pa ,不计绳重和轴摩擦.(g 取
10N /kg )求:
(1)竖直滑轮组中动滑轮的总重力G 动;
(2)水泥板 M 所受重力G M ;
(3)竖直滑轮组提拉水泥板 M 将其立起的过程中机械
效率η。(结果保留两位有效数字)
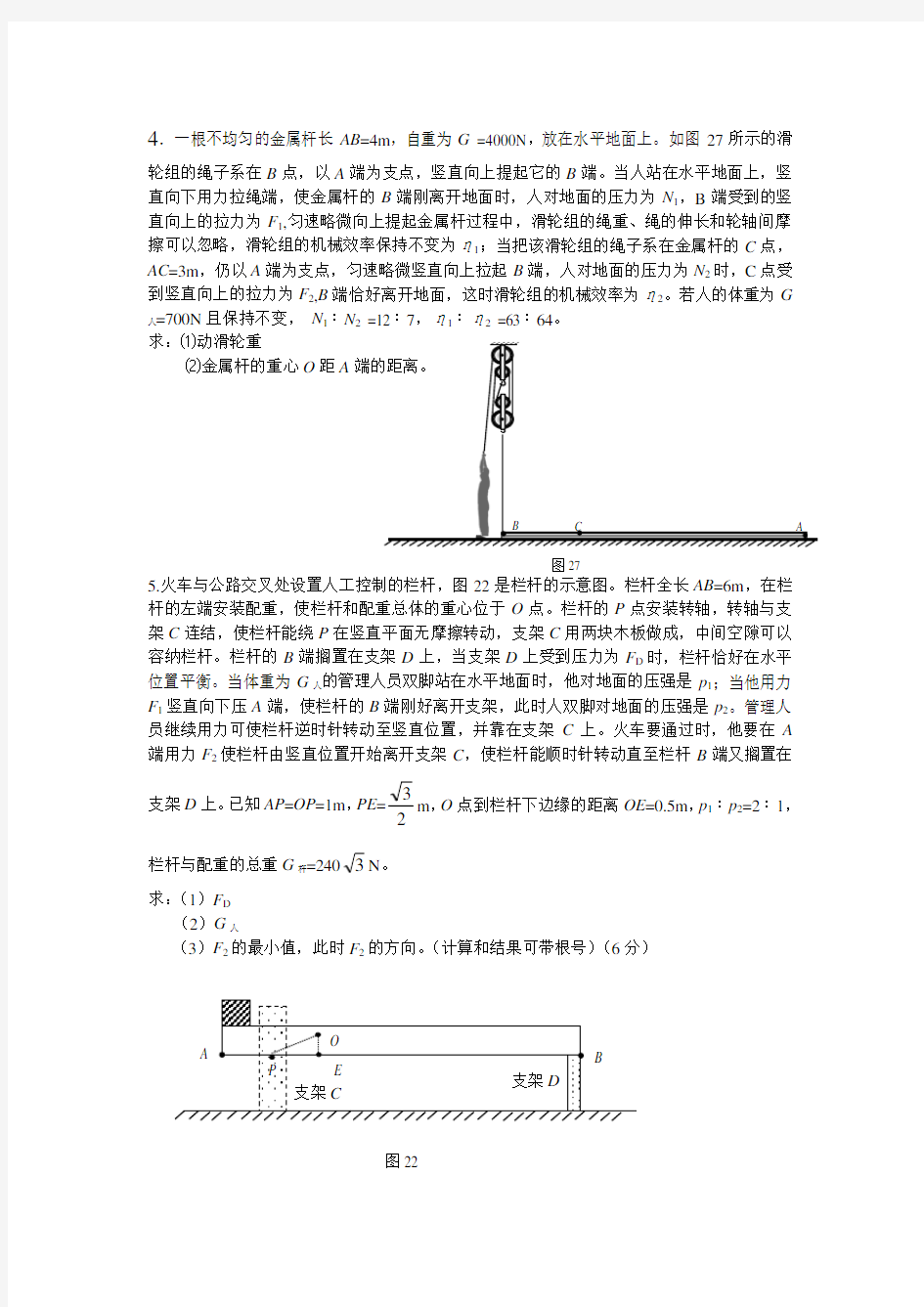
4.一根不均匀的金属杆长AB =4m ,自重为G =4000N ,放在水平地面上。如图27所示的滑轮组的绳子系在B 点,以A 端为支点,竖直向上提起它的B 端。当人站在水平地面上,竖直向下用力拉绳端,使金属杆的B 端刚离开地面时,人对地面的压力为N 1,B 端受到的竖直向上的拉力为F 1,匀速略微向上提起金属杆过程中,滑轮组的绳重、绳的伸长和轮轴间摩擦可以忽略,滑轮组的机械效率保持不变为η1;当把该滑轮组的绳子系在金属杆的C 点,AC =3m ,仍以A 端为支点,匀速略微竖直向上拉起B 端,人对地面的压力为N 2时,C 点受到竖直向上的拉力为F 2,B 端恰好离开地面,这时滑轮组的机械效率为η2。若人的体重为G 人=700N 且保持不变, N 1∶N 2 =12∶7,η1∶η2 =63∶64。
求:⑴动滑轮重
⑵金属杆的重心O 距A
5.火车与公路交叉处设置人工控制的栏杆,图22是栏杆的示意图。栏杆全长AB =6m ,在栏杆的左端安装配重,使栏杆和配重总体的重心位于O 点。栏杆的P 点安装转轴,转轴与支架C 连结,使栏杆能绕P 在竖直平面无摩擦转动,支架C 用两块木板做成,中间空隙可以容纳栏杆。栏杆的B 端搁置在支架D 上,当支架D 上受到压力为F D 时,栏杆恰好在水平位置平衡。当体重为G 人的管理人员双脚站在水平地面时,他对地面的压强是p 1;当他用力F 1竖直向下压A 端,使栏杆的B 端刚好离开支架,此时人双脚对地面的压强是p 2。管理人员继续用力可使栏杆逆时针转动至竖直位置,并靠在支架C 上。火车要通过时,他要在A 端用力F 2使栏杆由竖直位置开始离开支架C ,使栏杆能顺时针转动直至栏杆B 端又搁置在支架D 上。已知AP =OP =1m ,PE =2
3m ,O 点到栏杆下边缘的距离OE =0.5m ,p 1∶p 2=2∶1,栏杆与配重的总重G 杆=2403N 。
求:(1)F D
(2)G 人
(3)F 2的最小值,此时F 2的方向。(计算和结果可带根号)(6分)
图22 图27
杠杆知识点 1、杠杆定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 2、杠杆五要素组成杠杆示意图。 ①支点:杠杆绕着转动的点。用字母0表示。 ②动力:使杠杆转动的力。用字母 F i表示。 ③阻力:阻碍杠杆转动的力。用字母F2表示。 说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。 动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反 ④动力臂:从支点到动力作用线的距离。用字母l i表示。 ⑤阻力臂:从支点到阻力作用线的距离。用字母12表示。 画力臂方法:一找支点、二画线、三连距离、四标签 ⑴找支点0⑵画力的作用线(虚线):⑶画力臂(虚线,过支点垂直力的作用线作垂线):⑷标力臂(大 括号)。 3、研究杠杆的平衡条件: 杠杆平衡是指:杠杆静止或匀速转动。 实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。这样做的目的是:可以方便的从杠杆上量出力臂。 ⑴结论:杠杆的平衡条件(或杠杆原理)是: 动力X动力臂=阻力X阻力臂。写成公式F i l i=F2l2也可写成:F i / F 2=12 / 1 1 ⑵解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向和力臂大小;然后根据具体的情况具体分 析,确定如何使用平衡条件解决有关问题。(如:杠杆转动时施加的动力如何变化,沿什么方 向施力最小等。) ⑶ 解决杠杆平衡时动力最小问题:此类问题中阻力X阻力臂为一定值,要使动力最小,必须使动力臂最大,要使动力臂最大需要做 到①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。 4、应用: 结构 特点应用举例 名称 特征
初三物理第十二章简单机械知识点总结 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
简单机械知识点总结 一、杠杆 1、定义:一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就叫杠杆。 (1)“硬棒”不一定是棒,泛指有一定长度的,在外力作用下不变形的物体。 (2)杠杆可以是直的,也可以是任何形状的。 2、杠杆的七要素 (1)支点:杠杆绕着转动的固定点,用字母“O”表示。它可能在棒的某一端,也可能在棒的中间,在杠杆转动时,支点是相对固定的。 (2)动力:使杠杆转动的力,用“F1”表示。 (3)阻力:阻碍杠杆转动的力,用“F2”表示。 (4)动力作用点:动力在杠杆上的作用点。 (5)阻力作用点:阻力在杠杆上的作用点。 (6)动力臂:从支点到动力作用线的垂直距离,用“l1”表示。 (7)阻力臂:从支点到阻力作用线的垂直距离,用“l2”表示。 注意:无论动力还是阻力,都是作用在杠杆上的力,但这两个力的作用效果正好相反。一般情况下,把人施加给杠杆的力或使杠杆按照人的意愿转动的力叫做动力,而把阻碍杠杆按照需要方向转动的力叫阻力。 零,对杠杆的转动不起作用。 3、杠杆示意图的画法:(1)根据题意先确定 支点O;(2)确定动力和阻力并用虚线将其作用线 延长;(3)从支点向力的作用线画垂线,并用l1和 l2分别表示动力臂和阻力臂。如图所示,以翘棒为例。 第一步:先确定支点,即杠杆绕着哪一点转动,用字母“O”表示。如图甲所示。
第二步:确定动力和阻力。人的愿望是将石头翘起,则人应向下用力,画出此力即为动力用“F 1”表示。这个力F 1作用效果是使杠杆逆时针转动。而阻力的作用效果恰好与动力作用效果相反,在阻力的作用下杠杆应朝着顺时针方向转动,则阻力是石头施加给杠杆的,方向向下,用“F 2”表示如图乙所示。 第三步:画出动力臂和阻力臂,将力的作用线正向或反向延长,由支点向力的作用线作垂线,并标明相应的“l 1”“l 2”, “l 1”“l 2”分别表示动力臂和阻力臂,如图丙所示。 1、杠杆的平衡:当杠杆在动力和阻力的作用下静止时,我们就说杠杆平衡了。 2、杠杆的平衡条件实验 (1 时,力臂l 1和l 2恰好重合,这样就可以由杠杆上的刻度直接读出力臂食物大小了,而图甲杠杆在倾斜位置平衡,读力臂的数值就没有乙方便。由此,只有杠杆在水平位置平衡时,我们才能够直接从杠杆上读出动力臂和阻力臂的大小,因此本实验要求杠杆在水平位置平衡。 (2)在实验过程中绝不能再调节螺母。因为实验过程中再调节平衡螺母,就会破坏原有的平衡。 3、杠杆的平衡条件:动力×动力臂=阻力×阻力臂,或F 1l 1=F 2l 2。
杠杆知识点总结 1、 杠杆:__________________________杠杆五要素:_________、___________、__________、___________、__________。力臂:_______________________________________。 2、 力臂的作法:找出支点,作出力的示意图,从支点向力的作用线(力的作用线可正向或反向延长,但应以虚线表示)作垂线,将支点和垂足用虚线连接,在虚线上画上大括号 并标上相应字母。 练习:画出下图中各力的力臂。 练习:根据图中相应力臂画出所对应的力(知识点拨:力和力臂是相互 垂直的,此类试题只需作出力臂的垂线(用虚线表示)并延长,垂线与 杠杆的交点即为力的作用点,最后根据沿垂线画出力并标上箭头(注意 力用实线表示,不要忘了箭头和作用点)。 (07连云港)如图所示,杠杆在力F 1、F 2作用下处于平衡状态,L 1为F 1的力臂。请在图中作出F 2的力臂L 2及力F 1。 (2007年广西河池市)如图11所示,一轻质杠杆OA 在力F 1、F 2的 作用下处于静止状态.l 2是力F 2的力臂,请在图中画出F 1的力臂l 1 和力F 2的示意图. 3、 杠杆平衡条件又称____________,表达式为_________________,杠杆根据动力臂和阻 力臂的大小可分成三类:当动力臂大于阻力臂时这是________杠杆,如:____________,使 用这类杠杆要_______距离;当动力臂等于阻力臂时这是________杠杆,如:____________;当动力臂小于阻力臂时这是________杠杆,如:____________,使用这类杠杆要_______距离。 练习:1、画出下图中最小力的方向。 画出最小的力方法:找出支点、在杠杆上找出离支点最远的一点(注意不要产生思维定 势,不要总在杠杆的另一侧找),将支点和离支点最远的一点用虚线连接起来,作该虚线的垂线,最后沿垂线画出力并标上箭头(注意力用实线表示,不要忘了箭头和力的作用点)。 2、如图所示:杠杆在水平位置平衡,如果在A 、B 上各加 上相等质量的钩码,杠杆还能平衡吗?如不平衡则向哪一 端下沉?思考:1、如果减去相等质量呢?2、如果A 、B 各向外或向里移动相同距离呢?
第十二章简单机械知 识点总结
收集于网络,如有侵权请联系管理员删除 O 第十二章 简单机械 一、杠杆 (1)定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 (2)五要素──组成杠杆示意图。 ①支点:杠杆绕着转动的点。用字母O 表示。 ②动力:使杠杆转动的力。用字母F 1表示。 ③阻力:阻碍杠杆转动的力。用字母F 2表示。 说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。 动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反。 ④动力臂:从支点到动力作用线的距离。用字母L 1表示。 ⑤阻力臂:从支点到阻力作用线的距离。用字母L 2表示。 (3)画力臂方法:一找支点、二画线、三连距离、四标签。 ⑴找支点O ;⑵画力的作用线(虚线); ⑶画力臂(虚线,过支点垂直力的作用线作垂线); ⑷标力臂(大括号)。 (4)研究杠杆的平衡条件: 杠杆平衡是指:杠杆静止或匀速转动。 实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。 这样做的目的是:可以方便的从杠杆上量出力臂。 结论:杠杆的平衡条件(或杠杆原理)是: 动力×动力臂=阻力×阻力臂。写成公式F 1L 1=F 2L 2也可写成:F 1/F 2=L 2/L 1。 解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受 力与方向和力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。) 解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须使动力臂最大,要使动力臂最大需要做到:①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。 【习题】1.下列测量工具没有利用杠杆原理的是( ) A.弹簧测力计 B.杆秤 C. 台秤 D. 托盘天平 2.如图是小龙探究“杠杆平衡条件”的实验装置,用弹簧测力计在C 处竖直向上拉,杠杆保持平衡。若弹簧测力计逐渐向右倾斜,仍然使杠杆保持平衡,拉力F 的变化情况是( ) A . 变小 B . 变大 C. 不变 D.无法确定 3.(1)人要顺时针翻转木箱,请画出用力最小时力臂的大小。 (2)如图人曲臂将重物端起, 前臂可以看作一个杠杆。在示意图上画出F 1和F 2的力臂。 4. 如图所示,要使杠杆处于平衡状态,在A 点分别作用的四个力中,最小的是( ) A .F 1 B .F 2 C .F 3 D .F 4 5. 如图所示是某同学做俯卧撑时的示意图,他的质量为56kg 。身体可视为杠杆,O 点为支点.A 点为重心。每次俯卧撑他肩膀向上撑起40cm .( g 10N/ kg ) (1) 该同学所受重力是多少? (2) 在图中画出该同学所受重力的示意图,并画出重力的力臂L 1
确定物体重心位置的常用方法 一个物体的各部分都要受到重力作用,从效果上看,我们可以认为各部分受到的重力作用集中于一点,这一点叫做物体的重心.质量分布均匀、形状规则的物体,重心在它的几何中心,质量分布不均匀的物体,重心的位置除跟物体的形状有关外,还跟物体内质量的分布有关.载重汽车的重心随着装货多少和装载位置而变化,起重机的重心随着提升物体的重量和高度而变化. 确定物体重心的方法通常有以下几种, 一、几何法 质量分布均匀、形状规则的物体,重心在它的几何中心.如图1,均匀细直棒的重心在棒的中点,均匀球体的重心在球心,均匀网柱的重心在轴线的中点. 从中不难发现这样一个规律,若质量分布均匀、形状规则的物体有对称轴、对称中心、对称面,则重心必在此对称轴、对称中心、对称面上. 例1 质量分布均匀、形状规则的物体重心在它的____,为增大物体的稳定性,可以____物体重心的位置和增大物体底部的_______. 解析重力在物体的作用点叫做重心.形状规则质量分
布均匀的物体,重心在物体的几何中心;形状不规则的物体,有可能重心不在物体中心,甚至不在物体上, 提高稳定性的方法主要有两种:一是增大支承面,二是降低重心. 答案几何中心,降低,面积. 例2 下列有规则形状的物体质量分布均匀,请在图2中画出A、B、C、D各物体的重心位置. 解析分析图例根据对称性,质地均匀、形状规则的物体的重心在其几何中心上,如方形物体的重心在其几何中心,如果是方形薄物体,它的重心在两条对角线交点上.球的重心在球心,粗细均匀棒的重心在它的中点,所以各物体的重心如图3所示, 二、悬挂法 用悬挂法可以确定薄板的重心位置.首先找一根细绳,在薄板上找一点,用绳悬挂,画出薄板静止后的重力线,同理再找一点悬挂,两条重力线的交点就是物体重心. 例3 如图4所示是确定薄板重心的方法,先在A点把薄板悬挂起来,然后在C点把薄板再悬挂一次,由此可知,薄板的重心在哪里该过程应用的物理原理是什么 解析重心是重力的作用点,是一个物体受重力的总效果的反映.可根据重力的方向是竖直向下和二力平衡的条件来突破此题.如图4,先在A点把薄板悬挂起来,对于静止的
《重力与重心》教学设计 一、教学目标 ㈠知识与技能 1.会用力的图示和示意图来描述力。 2.知道重力的大小和方向,了解生活、生产中测量重力的方法。 3.知道重心的概念及均匀物体重心的位置。 4.知道重心和稳定的关系。 ㈡过程与方法 1.会用简单材料探究不规则物体的重心。 2.运用重力和重心解决实际问题。 ㈢情感、态度与价值观 体验重力现象的奇妙,体会重力在生产、生活中的应用,体会我国古代劳动人民的智慧,激发将所学知识服务于人类的愿望。 二、教学内容剖析 1.本节课的地位和作用: 本节对力的描述和重力的学习是静力学的开端,是力学学习的基础,对后续知识的学习至关重要。 2.本节教学重点:力的图示、重力和重心 3.本节教学难点:力的图示、重心的位置 三、教学的思路与方法 1.学生在初中已经学过力的概念,但由于概念比较抽象,仍有必要螺旋上升,进一步扩展视野;对于力的描述方法,初中已学过力的示意图,本节重点是力的图示;重力和重心要在初中的基础上进一步深化和扩展,为后续章节打下坚实的基础。 2.力的图示和力的示意图属于技能要求,不仅是本节的要求,也是贯穿全部力学的要求;对于力的图示,学生容易出错,不仅要教给学生它的画法,还有必要让学生亲自动手画,并对学生出现的问题及时给予纠错。
3.重力的教学要注意创设情景,让学生感受到重力无处不在,体会身边处处有物理,激发学习的兴趣;重力的大小、方向、作用点是学习的要点,要紧扣这三要素进行教学。 4.重心是学生在生产、生活中经常碰到的问题,但概念还是比较抽象。要通过与质点概念类比,以等效的思想引入,从而进行思想方法的渗透。重心位置及其确定难点在不规则、质量分布不均匀的物体的重心,要让学生知道“悬挂法”的方法及其原理,并自带材料进行测量。重心位置改变的现象很多,可鼓励学生联系实际多举一些生活、生产中的实例。 5.重心与稳定是生活、生产中经常碰到的又一问题。为了增加稳定程度,可降低重心,也可扩大支持面积,可引导学生联系生活、生产列举实例,同时还应让学生知道,稳定程度小也有用处。 6.利用多媒体辅助教学,充分利用有关的图片材料和ppt课件,提高课堂效率,激发学生学习兴趣。
初二物理杠杆滑轮知识 点汇总 SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#
一、杠杆定义 定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 二、滑轮定义 滑轮定义:周边有槽,中心有一转动的轮子叫滑轮。如右图所示。因为滑轮可以连续旋转,因此可看作是能够连续旋转的杠杆,仍可以用杠杆的平衡条件来分析。 根据使用情况不同,滑轮可分为定滑轮和动滑轮。 三、三种滑轮特点 三种滑轮特点: 1)定滑轮特点:不省力,但能改变动力的方向。(实质是个等臂杠杆)。 2)动滑轮特点:省一半力,但不能改变动力方向,要费距离。(实质是动力臂为阻力臂二倍的杠杆) 3)滑轮组:使用滑轮组时,滑轮组用几段绳子吊着物体,提起物体所用的力就是物重的几分之一。[pagebreak] 四、滑轮组 1、定义:由若干个定滑轮和动滑轮匹配而成。 2、特点:可以省力,也可以改变力的方向。使用滑轮组时,有几段绳子吊着物体,提起物体所用的 力就是物重的几分之一,即(条件:不计动滑轮、绳重和摩擦)。 注意:如果不忽略动滑轮的重量则: 3、动力移动的距离s和重物移动的距离h的关系是:使用滑轮组时,滑轮组用n段绳子吊着物体,提起物体所用的力移动的距离就是物体移动距离的n倍,即s=nh。如下图所示。(n表示承担物重绳子的段数) 4、绳子端的速度与物体上升的速度关系: 五、动滑轮 ①定义:和重物一起移动的滑轮。(可上下移动,也可左右移动) ②实质:动滑轮的实质是:动力臂为阻力臂2倍的省力杠杆。 ③特点:使用动滑轮能省一半的力,但不能改变动力的方向。 ④理想的动滑轮(不计轴间摩擦和动滑轮重力)则:F=(1/2)G只忽略轮轴间的摩擦则拉力 F=(G(物)+G(动))/2绳子自由端移动距离S(F)(或V(F)=2倍的重物移动的距离S(G)(或V(G)) 六、定滑轮 ①定义:中间的轴固定不动的滑轮。 ②实质:定滑轮的实质是:等臂杠杆 ③特点:使用定滑轮不能省力但是能改变动力的方向。 ④对理想的定滑轮(不计轮轴间摩擦)F=G 绳子自由端移动距离S(F)(或速度v(F))=重物移动的距离S(G)(或速度V(G)) [pagebreak]
Lesson 1 杠杆 一、知识点梳理 1、杠杆定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 ①支点:杠杆绕着转动的点。用字母O 表示。 ②动力:使杠杆转动的力。用字母 F1表示。 ③阻力:阻碍杠杆转动的力。用字母 F2表示。 说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。 动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反 支点一定在杠杆上面 ④动力臂:从支点到动力作用线的距离。用字母l1表示。 ⑤阻力臂:从支点到阻力作用线的距离。用字母l2表示。 画力臂方法:一找支点、二画线、三连距离、四标签 ⑴找支点O;⑵画力的作用线(虚线);⑶画力臂(虚线,过支点垂直力的作用线作 垂线);⑷标力臂(大括号)。(用两端带相反方向箭头的实线也可以用来表示力臂) 3、研究杠杆的平衡条件: 杠杆平衡是指:杠杆静止或匀速转动。 实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。这样做的目的是:可以方便的从 杠杆上量出力臂,也可以消除杠杆自重对实验的影响 ⑴结论:杠杆的平衡条件(或杠杆原理)是: 动力×动力臂=阻力×阻力臂。写成公式F1l1=F2l2也可写成:F1 / F2=l2 / l1 ⑵解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向和 力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。(如:杠 杆转动时施加的动力如何变化,沿什么方向施力最小等。) ⑶解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须 使动力臂最大,要使动力臂最大需要做到①在杠杆上找一点,使这点到支点的距离最远;②
杠杆知识点 1、杠杆定义:在力得作用下绕着固定点转动得硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 2、杠杆五要素——组成杠杆示意图。 ①支点:杠杆绕着转动得点。用字母O 表示。 ②动力:使杠杆转动得力。用字母 F1表示。 ③阻力:阻碍杠杆转动得力。用字母F2表示。 说明:动力、阻力都就是杠杆得受力,所以作用点在杠杆上。 动力、阻力得方向不一定相反,但它们使杠杆得转动得方向相反 ④动力臂:从支点到动力作用线得距离。用字母l1表示。 ⑤阻力臂:从支点到阻力作用线得距离。用字母l2表示。 画力臂方法:一找支点、二画线、三连距离、四标签 ⑴找支点O;⑵画力得作用线(虚线);⑶画力臂(虚线,过支点垂直力得作用线作垂线);⑷标力臂(大括 号)。 3、研究杠杆得平衡条件: 杠杆平衡就是指:杠杆静止或匀速转动。 实验前:应调节杠杆两端得螺母,使杠杆在水平位置平衡。这样做得目得就是:可以方便得从杠杆上量出力臂。 ⑴结论:杠杆得平衡条件(或杠杆原理)就是: 动力×动力臂=阻力×阻力臂。写成公式F1l1=F2l2也可写成:F1/ F2=l2 / l1 ⑵解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向与力臂大小;然后根据具 体得情况具体分析,确定如何使用平衡条件解决有关问题。(如:杠杆转动时施加得动力如何变化,沿什么方向施
力最小等。) ⑶解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须使动力臂最大,要使动 力臂最大需要做到①在杠杆上找一点,使这点到支点得距离最远;②动力方向应该就是过该点且与该连线垂直得方向。 4、应用: 说明:应根据实际来选择杠杆,当需要较大得力才能解决问题时,应选择省力杠杆,当为了使用方便,省距离时,应选费力杠杆。 经典考题 1、图5就是环卫工人用得一种垃圾夹得结构示意图。拉绳得一端固定在手把上,另一端穿过空心管杆与两夹爪得一 端相连。当用力捏手把时,夹爪在拉绳得作用下可夹持物体,同时弹簧被压缩;当松开手把时,夹爪在弹簧得作用下恢复原状。在使用过程中,手把与夹爪分别就是( )?A、省力杠杆,费力杠杆?B、费力杠杆,省力杠杆?C省力杠杆,省力杠杆?D、费力杠杆,费力杠杆
1.如图13所示,要把圆筒B 推上台阶。请在图中画出最小推力F 。 2.如图,一块截面积为矩形ABCD 的均匀金属块重2000N ,它的长宽之比为4∶3, 将它置于水平地面上如图12所示,若在A 点用力F 。 2、建筑工人使用如图 28 所示装置,将质量分布均匀的长方体水泥板 M 吊起后放人水中。工人通过控制电碳徽 A 和电动机 B ,始终保持水泥板 M 所受拉力竖直向上。当电动机 A 对绳的拉力为零时,电动机 A 对地面的压强为p 0;当水泥板 M 一端被竖直滑轮组拉起,另一端仍停在地面上,且水泥板 M 与水平地面成某角度时,电动机 A 对地面的压强为 p 1;当水泥板 M 被竖直滑轮组拉离地面时,电动机 A 对地面的压强为 p 2 ;当将水泥板 M 被悬挂着浸没在水中时,电动机 A 对地面的压强为 p 3。 已知:水泥板 M 的体积氏为 0.1m 3 , 211p p p -=?=5250Pa ,022p p p -=?=10250Pa , 033p p p -=?=5250Pa ,不计绳重和轴摩擦.(g 取 10N /kg )求: (1)竖直滑轮组中动滑轮的总重力G 动; (2)水泥板 M 所受重力G M ; (3)竖直滑轮组提拉水泥板 M 将其立起的过程中机械 效率η。(结果保留两位有效数字)
4.一根不均匀的金属杆长AB =4m ,自重为G =4000N ,放在水平地面上。如图27所示的滑轮组的绳子系在B 点,以A 端为支点,竖直向上提起它的B 端。当人站在水平地面上,竖直向下用力拉绳端,使金属杆的B 端刚离开地面时,人对地面的压力为N 1,B 端受到的竖直向上的拉力为F 1,匀速略微向上提起金属杆过程中,滑轮组的绳重、绳的伸长和轮轴间摩擦可以忽略,滑轮组的机械效率保持不变为η1;当把该滑轮组的绳子系在金属杆的C 点,AC =3m ,仍以A 端为支点,匀速略微竖直向上拉起B 端,人对地面的压力为N 2时,C 点受到竖直向上的拉力为F 2,B 端恰好离开地面,这时滑轮组的机械效率为η2。若人的体重为G 人=700N 且保持不变, N 1∶N 2 =12∶7,η1∶η2 =63∶64。 求:⑴动滑轮重 ⑵金属杆的重心O 距A 5.火车与公路交叉处设置人工控制的栏杆,图22是栏杆的示意图。栏杆全长AB =6m ,在栏杆的左端安装配重,使栏杆和配重总体的重心位于O 点。栏杆的P 点安装转轴,转轴与支架C 连结,使栏杆能绕P 在竖直平面无摩擦转动,支架C 用两块木板做成,中间空隙可以容纳栏杆。栏杆的B 端搁置在支架D 上,当支架D 上受到压力为F D 时,栏杆恰好在水平位置平衡。当体重为G 人的管理人员双脚站在水平地面时,他对地面的压强是p 1;当他用力F 1竖直向下压A 端,使栏杆的B 端刚好离开支架,此时人双脚对地面的压强是p 2。管理人员继续用力可使栏杆逆时针转动至竖直位置,并靠在支架C 上。火车要通过时,他要在A 端用力F 2使栏杆由竖直位置开始离开支架C ,使栏杆能顺时针转动直至栏杆B 端又搁置在支架D 上。已知AP =OP =1m ,PE =2 3m ,O 点到栏杆下边缘的距离OE =0.5m ,p 1∶p 2=2∶1,栏杆与配重的总重G 杆=2403N 。 求:(1)F D (2)G 人 (3)F 2的最小值,此时F 2的方向。(计算和结果可带根号)(6分) 图22 图27
姓名学生姓名填写时间 学科物理 . 年级 初二教材版本人教版 阶段观察期□维护期□本人课时统计 [ 第()课时共()课时 课题名称杠杆上课时间 教学目标 @ 同步教学知识内容 杠杆,支点、动力、阻力、动力臂和阻力臂。个性化学习问题解决杠杆,支点、动力、阻力、动力臂和阻力臂 教学重点(1)知道杠杆,支点、动力、阻力、动力臂和阻力臂。 @ (2)知道杠杆可以改变力的方向和大小,知道省力、费力及等臂杠杆,了解这三种类型的杠杆的应用。了解杠杆的平衡条件 教学难点(1)知道杠杆,支点、动力、阻力、动力臂和阻力臂。 (2)知道杠杆可以改变力的方向和大小,知道省力、费力及等臂杠杆,了解这三种类型的杠杆的应用。了解杠杆的平衡条件 教学过程 教师活动 一、- 二、教学过程 杠杆的概念及五要素 1、支点:杠杆转动时所绕的点(轴)。 杠杆支点的辨识:杠杆转动时(瞬间)唯一不动的点;
2、动力:使杠杆转动的力。 3、阻力:阻碍杠杆转动的力。 ) 4、动力臂:支点到动力作用线的距离。 5、阻力臂:支点到阻力作用线的距离。 力臂的确定:延长力的作用线,过支点作力的作用线的垂线,量取支点到垂足的距离即为力臂。 关于力臂的概念,要注意以下几点: (1)力臂是支点到力的作用线的距离,从几何上来看,是“点”到“直线”的距离。其中“点”为杠杆的支点;“线”为力的作用线,即通过力的作用点沿力的方向所画的直线。 (2)某一力作用在杠杆上,若作用点不变,但力的方向改变,那么力臂一般要改变。如图所示,力F的大小一样,由于作用在杠杆上A点的方向不同,力臂就不同.(a)图中F的力臂l比(b)图中F的力臂lˊ大. (3)力臂不一定在杠杆上,如图所示.(4)若力的作用线过支点,则它的力臂为零. ` (3)画力臂的一般步骤
专题复习杠杆与简单机械 一、杠杆:定义:在力的作用下绕着固定点转动的硬棒。 1、五要素——组成杠杆示意图 ①支点②动力③阻力④动力臂,从支点到动力作用线的距离; ⑤阻力臂,从支点到阻力作用线的距离; 2、画力臂方法:⑴找支点O;⑵画动力和阻力(实线),如果需要延长力的作用线(虚线); ⑶画力臂(虚线,过支点垂直力的作用线作垂线);⑷标力臂(大括号)。 3、研究杠杆的平衡条件:杠杆静止或匀速转动;动力×动力臂=阻力×阻力臂;F1l1=F2l2 4、杠杆应用 O)的力臂 实验注意事项:实验前,应调节杠杆两端的螺母,使杠杆在水平位置平衡。(杠杆平衡时动力最小问题)1、某同学在做单臂俯卧撑运动,如图所示。他的重心在A点,所受重力为520N,他 将身体撑起处于平衡状态时,地面对手的支持力为N。 2、要使杠杆处于平衡状态,在A点分别作用的四个力中,最小的是() A.F1 B.F2 C.F3 D.F4 2题图3题图 4题图 3、二个体积相等的实心铜球和铝球,挂于轻质杠杆两端,当支点O位于某处时,杠杆平衡,如图所示,现将两球慢慢浸没在水中后,要想使杠杆平衡,下述支点O的移动情况中正确的是() A.向铜球侧移动 B.向铝球侧移动 C.不需要移动 D.无法判断 4、如图所示是一弯曲的杠杆,O是支点,OB=CA=4 cm,OC=3 cm。在B点挂一重物G=10 N,在A点加一力,要使杠杆平衡,力F最小值为多大? O
二、 其他简单机械 1、定滑轮:定义:中间的轴固定不动的滑轮。实质:等臂杠杆。特点: 使用定滑轮不能省力但是能改变动力的方向。 (不计轮轴间摩擦)F=G ,绳子自由端移动距离S F (或速度v = 重物移动的距离S G (或速度v G ) 2、动滑轮:定义:和重物一起移动的滑轮。实质:动力臂为阻力臂2倍的 省力杠杆。特点:使用动滑轮能省一半的力,但不能改变动力的方向。 (不计轴间摩擦和动滑轮重力)F= 1 2G 只忽略轮轴间的摩擦则拉力F= 1 2(G 物+G 动)绳子自由端移动距离S F (或v F )=2倍的重物移动的距离“用虚线把重物和动滑轮从滑轮组隔离,以重物和动滑轮为研究对象” 5、有一个结构不明的滑轮组,只知道拉力F 向下拉绳子时,每拉下12m ,重物就 上升3m ,拉力F=400N ,重物为多大,试画出滑轮的结构图。 6、如图甲所示,用F=10N 的力,拉着物体在地面上匀速运动,则物体与地面的摩 擦力是多大?若物体向前移动1m ,绳子要拉过多少m ? 6题图 7题图 7、如图所示,通过定滑轮匀速提起重物G 时,向三个方向拉动的力分别为F 1、F 2、F 3,则三个力大小关系是( ) A.F 1最大 B.F 2最大 C.F 3最大 D.一样大 8、如图所示,用三种方法拉动同一物体在相同的水平地面上做匀速直线运动,所用的拉力分别是F 1、F 2、F 3。则( ) A.F 1>F 2>F 3 B.F 1<F 2<F 3 C.F 2>F 1>F 3 D.F 2<F 1<F 3 4、轮轴与斜面 轮轴:两个半径不同的轮子固定在同一转轴上的装置叫做轮轴。半径较大的叫做轮,半径较小的叫做轴。 实质:轮轴是一个可以连续转动的杠杆。 特点: 由于轮的半径大于轴的半径,因此当动力作用 于轮上时,轮轴为省力杠杆;当动力作用在轴上时, 轮轴为费力杠杆。 斜面:斜面是一种可以省力但是费距离的简单机械。 F 1
杠杆知识点自归纳标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]
杠杆知识点 1、杠杆定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 2、杠杆五要素——组成杠杆示意图。 ①支点:杠杆绕着转动的点。用字母O 表示。 ②动力:使杠杆转动的力。用字母 F 1 表示。 ③阻力:阻碍杠杆转动的力。用字母 F 2 表示。 说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。 动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反 ④动力臂:从支点到动力作用线的距离。用字母l 1表示。 ⑤阻力臂:从支点到阻力作用线的距离。用字母l 2表示。 画力臂方法:一找支点、二画线、三连距离、四标签 ⑴ 找支点O ;⑵ 画力的作用线(虚线);⑶ 画力臂(虚线,过支点垂直力的作用线作垂线);⑷ 标力臂(大括号)。 3、研究杠杆的平衡条件: 杠杆平衡是指:杠杆静止或匀速转动。 12
实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。这样做的目的是:可以方便的从杠杆上量出力臂。 ⑴结论:杠杆的平衡条件(或杠杆原理)是: 动力×动力臂=阻力×阻力臂。写成公式F 1l 1 =F 2 l 2 也可写成:F 1 / F 2 =l 2 / l 1 ⑵解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向 和力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。 (如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。) ⑶解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必 须使动力臂最大,要使动力臂最大需要做到①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。 4、应用:
杠杆知识点和练习 TTA standardization office【TTA 5AB- TTAK 08- TTA 2C】
杠杆知识点1、杠杆定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 ①支点:杠杆绕着转动的点。用字母O 表示。 ②动力:使杠杆转动的力。用字母 F1表示。 ③阻力:阻碍杠杆转动的力。用字母 F2表示。 说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。 动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反 ④动力臂:从支点到动力作用线的距离。用字母l1表示。 ⑤阻力臂:从支点到阻力作用线的距离。用字母l2表示。 画力臂方法:一找支点、二画线、三连距离、四标签 ⑴找支点O;⑵画力的作用线(虚线);⑶画力臂(虚线,过支点垂直力的作 用线作垂线);⑷标力臂(大括号)。 3、研究杠杆的平衡条件: 杠杆平衡是指:杠杆静止或匀速转动。 实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。这样做的目的是:可以方 便的从杠杆上量出力臂。 ⑴结论:杠杆的平衡条件(或杠杆原理)是: 动力×动力臂=阻力×阻力臂。写成公式F1l1=F2l2也可写成:F1 / F2=l2 / l1
⑵解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方 向和力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。) ⑶解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小, 必须使动力臂最大,要使动力臂最大需要做到①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。 4、应用:等臂杠杆、费力杠杆(省距离)、省力杠杆(费距离) 一、填空题 1.杠杆静止不动时的状态叫做杠杆的_______. 在做“研究杠杆平衡条件”实验时,把杠杆挂在支架上以后,首先要调节_____使杠杆处在_____位置并保持平衡. 2.杠杆的平衡条件可以用公式表示为_____,从这个公式中可以看出,杠杆平衡时动力 臂是阻力臂的几倍,动力就是阻力的_____. 3.如果使用撬棒的动力臂是100 cm,阻力臂是30 cm,当用60 N的动力时,能撬动重____ N的物体. 4.如图所示,重为9 N的物体挂在B处,O为支点,要想使杠 杆保持水平平衡,在A处施加的最小的力是_____N,方向_ ____. 5.如果作用在杠杆上的动力是100 N,动力臂与阻力臂之比是5∶1,那么杠杆平衡 时,阻力是_____N. 6.某杠杆匀速提起重物,动力等于重力的四分之三,这个杠杆动力臂与阻力臂之比是 _____.
杠杆知识点总结 1、 杠杆:__________________________杠杆五要素:_________、___________、 __________、___________、__________。力臂:___________ ____________________________。 2、 力臂的作法:找出支点,作出力的示意图,从支点向力的作用线(力的作用线可正向或反 向延长,但应以虚线表示)作垂线,将支点和垂足用虚线连接,在虚线上画上大括号并 标上相应字母。 练习:画出下图中各力的力臂。 练习:根据图中相应力臂画出所对应的力(知识点拨:力和力臂是相互 垂直的,此类试题只需作出力臂的垂线(用虚线表示)并延长,垂线与杠 杆的交点即为力的作用点,最后根据沿垂线画出力并标上箭头(注意力 用实线表示,不要忘了箭头和作用点)。 (07连云港)如图所示,杠杆在力F 1、F2作用下处于平衡状态,L1为F1的力臂。请在图中作出F2的力臂L2及力F1。 (2007年广西河池市)如图11所示,一轻质杠杆OA 在力F 1、F 2的 作用下处于静止状态.l 2是力F 2的力臂,请在图中画出F1的力臂l 1 和力F 2的示意图. 3、 杠杆平衡条件又称____________,表达式为_________________,杠杆根据动力 臂和阻 力臂的大小可分成三类:当动力臂大于阻力臂时这是________杠杆,如:____________, 使用这类杠杆要_______距离;当动力臂等于阻力臂时这是________杠杆,如:___ _________;当动力臂小于阻力臂时这是________杠杆,如:____________,使用这类 杠杆要_______距离。 练习:1、画出下图中最小力的方向。 画出最小的力方法:找出支点、在杠杆上找出离支点最远的一点(注意不要产生思维定 势,不要总在杠杆的另一侧找),将支点和离支点最远的一点用虚线连接起来,作该虚线的 垂线,最后沿垂线画出力并标上箭头(注意力用实线表示,不要忘了箭头和力的作用点)。 2、如图所示:杠杆在水平位置平衡,如果在A、B 上各加 上相等质量的钩码,杠杆还能平衡吗?如不平衡则向哪一 端下沉?思考:1、如果减去相等质量呢?2、如果A 、B 各 向外或向里移动相同距离呢? F 2 L 1 O
一、杠杆定义 定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ??????②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 二、滑轮定义 滑轮定义:周边有槽,中心有一转动的轮子叫滑轮。如右图所示。因为滑轮可以连续旋转,因此可看作是能够连续旋转的杠杆,仍可以用杠杆的平衡条件来分析。 根据使用情况不同,滑轮可分为定滑轮和动滑轮。 三、三种滑轮特点 三种滑轮特点: 1)定滑轮特点:不省力,但能改变动力的方向。(实质是个等臂杠杆)。 2)动滑轮特点:省一半力,但不能改变动力方向,要费距离。(实质是动力臂为阻力臂二倍的杠杆) 3)滑轮组:使用滑轮组时,滑轮组用几段绳子吊着物体,提起物体所用的力就是物重的几分之一。[pagebreak] 四、滑轮组 1、定义:由若干个定滑轮和动滑轮匹配而成。 2、特点:可以省力,也可以改变力的方向。使用滑轮组时,有几段绳子吊着物体,提起物体所用的力就是物重的几分之一,即(条件:不计动滑轮、绳重和摩擦)。 注意:如果不忽略动滑轮的重量则: 3、动力移动的距离s和重物移动的距离h的关系是:使用滑轮组时,滑轮组用n段绳子吊着物体,提起物体所用的力移动的距离就是物体移动距离的n倍,即s=nh。如下图所示。(n表示承担物重绳子的段数) 4、绳子端的速度与物体上升的速度关系: 五、动滑轮 ①定义:和重物一起移动的滑轮。(可上下移动,也可左右移动) ②实质:动滑轮的实质是:动力臂为阻力臂2倍的省力杠杆。 ③特点:使用动滑轮能省一半的力,但不能改变动力的方向。 ④理想的动滑轮(不计轴间摩擦和动滑轮重力)则:F=(1/2)G只忽略轮轴间的摩擦则拉力 F=(G(物)+G(动))/2绳子自由端移动距离S(F)(或V(F)=2倍的重物移动的距离S(G)(或V(G)) 六、定滑轮 ①定义:中间的轴固定不动的滑轮。 ②实质:定滑轮的实质是:等臂杠杆 ③特点:使用定滑轮不能省力但是能改变动力的方向。 ④对理想的定滑轮(不计轮轴间摩擦)F=G 绳子自由端移动距离S(F)(或速度v(F))=重物移动的距离S(G)(或速度V(G)) [pagebreak]
杠杆知识点自归纳
杠杆知识点 1、杠杆定义:在力的作用下绕着固定点转动的硬棒叫杠杆。 说明:①杠杆可直可曲,形状任意。 ②有些情况下,可将杠杆实际转一下,来帮助确定支点。如:鱼杆、铁锹。 2、杠杆五要素——组成杠杆示意图。 ①支点:杠杆绕着转动的点。用字母O 表示。 ②动力:使杠杆转动的力。用字母 F 1 表示。 ③阻力:阻碍杠杆转动的力。用字母 F 2 表示。 说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。 动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反 ④动力臂:从支点到动力作用线的距离。用字母l 1 表示。 ⑤阻力臂:从支点到阻力作用线的距离。用字母l 2 表示。 画力臂方法:一找支点、二画线、三连距离、四标签 ⑴找支点O;⑵画力的作用线(虚线);⑶画力臂(虚线,过支点垂直力的作用线作垂 线);⑷标力臂(大括号)。 3、研究杠杆的平衡条件: 杠杆平衡是指:杠杆静止或匀速转动。 实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。这样做的目的是:可以方便的从杠杆上量出力臂。 ⑴结论:杠杆的平衡条件(或杠杆原理)是: 动力×动力臂=阻力×阻力臂。写成公式F 1l 1 =F 2 l 2 也可写成:F 1 / F 2 =l 2 / l 1 ⑵解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向和力臂 大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。) ⑶解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须使动 力臂最大,要使动力臂最大需要做到①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。 4、应用:
19.4 课题学习重心 学习目标1,通过寻找常见的几何图形重心的数学活动,经历探究物体与图形的重心的过程,了解规则几何图形的重心就是它的几何中心。 2,在探索线段、特殊平行四边形、三角形、任意多边形的重心等活动过程中,经历观察,实验、猜想等过程,发展几何直觉。 3,了解重心的物理意义,体会数学与物理学之间的联系,能用实验的方法寻找任意多边形的重心 4,使学生乐于参与数学活动的探究,在动手的过程中感受数学活动的乐趣。 过程与方法: 经历寻找几何图形的重心的过程,领会物体重心的内在含义,提高操作应用能力.发展几何识图意识. 重难点、关键 重点:寻找几何图形的重心,感受直觉意识. 难点:实验活动的规范操作,以及寻找三角形的重心。. 关键:把观察、猜想、操作、作图融合在一起,激发学生的直觉意识. 教学准备 教师准备:尺规、教具:木条、四边形木板,平行四边形、矩形、菱形、正方形、三角形硬纸片. 学生准备:预习本节课内容,准备与教师准备同样的学具. 学法解析 1.认知题点:学习了三角形、平行四边形、矩形、菱形、?正方形等几何图形,积累一定的经验的基础上学习本节课内容. 2.知识线索: 几何图形→发现→探究→确定重心. 3.学习方式:采用操作感知的方式来发现、寻找、重心. 教学过程 一、操作感知,寻求方法 【引入概念】
教师操作:拿出一块准备好的木板(四边形)找到一点,用一个手指顶住这一点,木板会保持平衡,告诉学生这一点就是这个几何图形的重心. 教师活动:提出一些常见的几何图形,如:线段、三角形、四边形等的重心在哪个位置上呢?大家一起来探讨. 教师教具:均匀的木条、规则四边形:正方形、长方形、菱形、一般平行四边形等硬纸片;三角形、五边形硬纸片;钉子,细绳,小重物,刻度尺等. 【活动方略】 问题1:寻找线段的重心. 学生活动:出示学具:一根均匀的木条,去找这条木条的平衡点.(分四人小组讨论).小组活动: (1)用刻度尺量出平衡点的位置,相互比较. (2)从相互比较中得出线段的重心:线段的重心就是线段的中点. 教师活动:巡视,并和学生共同试验,发现问题,最后归纳. 问题2:寻找平行四边形的重心. 学生活动:分四人小组,拿出各自的学具探索,相互比较. 小组活动: (1)用一个手指顶住一块均匀的正方形硬纸片,寻找平衡点; (2)互相交流后,找到平行四边形重心是对角线的交点O.(如图) (3)由于矩形、菱形、正方形都是特殊的平行四边形,?可以发现它们的重心也都在它们对角线的交点上. 归纳小结:平行四边形的重心是它的两条对角线的交点.